Изобретение относится к способу и установке для измерения и контроля рамы транспортного средства, в частности рамы грузового автомобиля или автобуса.
Современные технические стандарты уже располагают способами для измерения и контроля рам транспортных средств, в которых оптическое измерительное устройство с лазерным источником и измерительной шкалой крепится снаружи на обод колеса транспортного средства. Снаружи на раму крепится рефлектор, который отражает луч лазерного источника в направлении измерительной шкалы оптического измерительного устройства. При креплении рефлектора на различных участках рамы и проведении соответствующих измерений с помощью лазерного луча, можно, исходя из отклонений точек лазерного входа на измерительной шкале, сделать выводы о степени деформации рамы. Для измерения рамы транспортного средства предусмотрены соответствующие лазерные источники с измерительной шкалой и рефлектором, которые располагаются на каждой продольной стороне рамы.
Недостатком обоих существующих способов для измерения и контроля рам транспортных средств является то, что для крепления рефлектора на раме приходится, в отдельных случаях, удалять навесные детали рамы, что требует временных затрат и отличается трудоемкостью. К тому же, расположенный в направлении вдоль рамы и поперечно далеко выступающий за нее, рефлектор, нельзя закрепить на любом участке рамы. Так как лазерный источник выступает за обод колеса транспортного средства, то и рефлектор должен соответственно выступать наружу, что при наличии определенных деформаций, может привести к ошибкам измерительного процесса. Такое случается, в частности, тогда, когда соответствующие измерительные устройства предусмотрены для обеих продольных сторон транспортного средства, с целью полного измерения рамы с обеих сторон. Измерительные ошибки имеют место быть, в частности, тогда, когда рама согнута по вертикальной и/или продольной оси транспортного средства.
Измерительная система для угла колеса и позиций шасси транспортного средства приведена в DE 69522937 Т2.
Задача настоящего изобретения - это представление способа и установки для измерения и контроля рамы транспортного средства, в частности рамы грузового автомобиля или автобуса, что должно обеспечить менее трудоемкий и быстрый способ измерения и проверки геометрических характеристик рамы, показав при этом высокую измерительную точность способа измерения и контроля.
Вышеизложенная задача будет решена с помощью указанного в начале способа, при котором измерительное устройство, имеющее источник и приемник излучения, располагается перед рамой, а лучи источника излучения передаются в направлении рамы на консоль рефлектора, снабженную, по меньшей мере, одним рефлектором, причем этот рефлектор размещается на одной из частей рамы.
При этом излучение рефлектора отражается на приемник излучения, а измерительное устройство вычисляет координаты положения рефлектора в различных точках измерения рамы, определяя при этом из полученных точек измерения, существенно недеформированный отрезок рамы и отклонение полученных точек измерения от недеформированного отрезка.
Под частью рамы может подразумеваться, преимущественно, внешний лонжерон рамы. На нем размещается, по меньшей мере, один рефлектор, таким образом, чтобы с помощью повторного учета координат положения рефлектора на различных отрезках лонжерона рамы и по направлению вдоль рамы, проецировать вертикальный и/или боковой контур лонжерона рамы, т.е. деформацию лонжерона по направлению вдоль рамы. По результату характеристик точек измерения, т.е. полученных координат положения рефлектора по направлению вдоль рамы, можно простым способом (графически) вычислить линейный участок, который соответствует недеформированной зоне части рамы или самой рамы. Этот недеформированный участок, т.е. соответствующий этой зоне линейный участок представляет собой базисную ось, по отношению к которой определяются единичные точки измерения, которые являются критерием для деформации рамы.
Основанное на применении программного обеспечения решение может, к примеру, предусмотреть, что сначала будет внесена диаграмма точек измерения, т.е. вычисленных на различные точках измерения по направлению вдоль рамы (Z) координат положения (Х-, У-, Z-координаты) рефлектора, которая покажет образованное пространство плоскости, исходя из направления вдоль рамы и горизонтального и вертикального поперечных направлений. Учитывая распределение точек измерения в пространстве плоскости, можно выбрать такие точки измерения, которые были вычислены на неповрежденном участке части рамы. Эти точки измерения располагаются на одной общей прямой. Они устанавливают линейный участок по отношению к его исходному и конечному пункту. Выбор точек измерения, которые могут соотноситься с линейным участком, может происходить автоматически либо путем визуального восприятия распределения точек измерения и путем выбора определенных точек измерения ответственным лицом и/или визуального осмотра деформации рамы транспортного средства. При этом определяется отклонение прочих точек измерения линейного участка, т.е. отклонение проложенной с его помощью или параллельно проходящей линейному участку базисной оси. В качестве альтернативы, на основе выборочных точка измерения, можно вычислить также линию регрессии и определить при этом отклонения точек измерения от линии регрессии. В дополнение, также возможно определение линии наилучшего соответствия для большей части точек измерения, которые как можно меньше отклоняются от характеристики линии и тем самым могут относиться к неповрежденному участку части рамы. Допустимое отклонение между координатами месторасположения точки измерения в Х-, У- и/или Z-направлении от установленного линейного участка должно быть менее 5%, а в особенных случаях - менее 2%. Это нужно для возможности осуществления соотношения, точки измерения с линейным участком. Результат показывает возможную деформацию измеренной или проверенной части рамы, высчитанную из отклонения точек измерения в Х-, У- и/или Z-направлении от точек измерения, которые относятся к неповрежденному участку части рамы. В особенных случаях, можно определять соответствующие расстояния в обеих плоскостях пространства рамы, чтобы идентифицировать деформации, причем как в горизонтальном поперечном направлении, так и в вертикальном поперечном. Разумеется, что для проведения заключительных мероприятий по устранению повреждений следует предусмотреть графическую систему отображений и обработки данных точек измерения.
В соответствии с данным изобретением, рефлектор следует крепить, по меньшей мере, к одной части рамы и в частности к одному лонжерону рамы. В частности, при определении координат положения, его можно держать на части рамы, т.е. он должен быть прикреплен к части рамы, причем обязательно посредством консоли рефлектора. Вышеизложенное будет обсуждаться далее по тексту. С помощью перемещения, т.е. смещения рефлектора вдоль части рамы и вычисления координат положения на различных измерительных позициях в направлении вдоль рамы, определяются, (отображаются) характеристики части рамы по всем трем направлениям в пространстве преимущественно. При этом соответствующий данной части рамы рефлектор, должен демонстрировать равное константное расстояние в горизонтальном и вертикальном поперечном направлении от части рамы.
Данное изобретение не предусматривает то, что геометрическая осевая линия рамы является известной или предварительно определенной. В частности, для измерения рамы, измерительное устройство не должно быть точно выверено по отношению к геометрической осевой линии рамы. Поэтому, измерение и контроль рамы транспортного средства не являются трудоемкими и осуществимы в короткий промежуток времени. При соблюдении минимального расстояния, которое определяется с помощью измерительной техники и составляет от 2 м до 5 м, представляется возможность измерения и контроля рамы путем помещения измерительного устройства (если оно соответствующим образом сконструировано) на любую позицию, находящуюся перед/за рамой.
Для работы установки, соответствующей способу по данному изобретению, предусмотрено следующее:
- по меньшей мере, одна консоль рефлектора, имеющая один рефлектор,
- источник излучения и приемник излучения, оснащенные измерительным устройством и вычислительным устройством, которое сконструировано для осуществления соответствующего данному изобретению способа. В частности, также должна быть предусмотрена компьютерная программа, оснащенная программным кодом для осуществления соответствующего данному изобретению способа.
Для предпочтительного воплощения изобретения предусмотрено одновременное проведение измерения и контроля двух противолежащих, пролегающих в направлении вдоль рамы, частей рамы, в частности, противолежащих внешних лонжеронов рамы. Для этой цели, консоль рефлектора может в горизонтальном направлении иметь первый внешний рефлектор и противолежащий второй внешний рефлектор, причем оба внешних рефлектора должны закрепляться на противолежащих продольных частях предусмотренных внешних частей рамы. При этом измерительное устройство одновременно вычисляет координаты положения обоих рефлекторов. Таким образом, представляется возможным простой, не отнимающий много времени и нетрудоемкий способ измерения и контроля всей рамы.
Оба внешних рефлектора, в зависимости от потребности, перемещаются в горизонтальном направлении симметрично от геометрической середины между внешними рефлекторами, т.е. к середине консоли рефлектора. В этом контексте, консоль рефлектора может иметь два перемещаемых таким образом и расположенных в направлении друг к другу внешних рефлектора. Таким образом, внешние рефлекторы всегда находятся на одинаковом расстоянии до геометрической середины, независимо от расстояния рефлекторов между собой. Если внешние рефлекторы закреплены на противолежащих внешних лонжеронах рамы, т.е. соединены с ними, то тогда расстояние между внешними рефлекторами устанавливается в соответствии расстоянию между внешними лонжеронами рамы. При этом в большинстве случаев, перемещение первого внешнего рефлектора в поперечном направлении может автоматически привести к соответствующему по величине перемещению противолежащего внешнего рефлектора. Таким образом, обеспечивается постоянное одинаковое расстояние внешних рефлекторов от геометрической середины.
Сверх того, консоль рефлектора может быть оснащена двумя стационарными внутренними рефлекторами. Расстояние между внутренними рефлекторами является постоянным. Поэтому внутренние рефлекторы находятся на одинаковом расстоянии от геометрической середины. Внутренние рефлекторы предусмотрены, преимущественно, для определения расстояния между консолью рефлектора и измерительным устройством, что требует соответствующего формирования алгоритма, который предназначен для определения координат положения.
Внутренние и внешние рефлекторы расположены на общей горизонтальной оси. В этом контексте, рефлекторы могут быть синхронно перемещаемыми в вертикальном направлении. Таким образом, упрощается вычисление координат положения. В связи с этим, консоль рефлектора с перемещаемым в вертикальном направлении рефлектором может быть расположена на вертикальных кронштейнах, которые могут быть приспособлены под навешивание и/или крепление консоли рефлектора на противолежащих лонжеронах рамы. Консоль рефлектора перемещается, в основном, вверх и вниз по высоте, причем перемещение по высоте не предпринимается в момент определения координат месторасположения рефлекторов в различных точках измерения по направлению вдоль рамы. Посредством перемещаемой в вертикальном направлении консоли рефлектора предоставляется возможность осуществления измерения рамы на той высоте, на которой исключены помехи измерительного процесса, возникающие из-за присутствия навесных и вставных деталей рамы, например, под одним из расположенных на раме дифференциалов.
При оптимальной форме исполнения способа, соответствующего данному изобретению, исходя из точек измерения, определяется геометрическая осевая линия рамы обоих внешних рефлекторов. Это происходит с помощью пространства плоскости, образованного посредством направления вдоль рамы Z и горизонтального поперечного направления Х и/или из направления вдоль рамы Z и вертикального поперечного направления У. В качестве дополнения, соответствующее расстояние точек измерения может определяться от геометрической осевой линии. В частности, геометрическая осевая линия определяется исходя из таких точек измерения, которые могут соответствовать, т.е. соответствуют линейному участку, т.е. недеформированной зоне рамы. Это может также происходить автоматически, с помощью соответствующего программного обеспечения.
Соответствующий данному изобретению способ допускает то, что точки измерения, по которым определяется координаты месторасположения рефлекторов для измерения рамы, располагаются на различных больших расстояниях друг от друга. Предусматриваемые расстояния могут составлять от 0,1 м до 1,0 м, но в основном они составляют от примерно 0,2 до 0,5 м. В зоне деформации рамы также может быть предусмотрено большее количество точек измерения. Это нужно для того, чтобы предоставить возможность особенно точного определения деформации.
Следующий аспект данного изобретения, который не зависит от ранее описанных признаков соответствующего данному изобретению способу, предусматривает то, что рефлектор должен быть расположен в пределах ограниченной зоны внешних плоскостей рамы. Если консоль рефлектора предусматривает наличие нескольких рефлекторов, то тогда консоль рефлектора может быть расположена во внутренней зоне рамы, т.е. может быть вмонтирована в раму или прикреплена к ней. Крепление преимущественно осуществляется к внешним лонжеронам рамы.
В отличие от способов уровня техники, это изобретение не предусматривает крепления рефлектора на внешнюю часть рамы. В частности, в соответствии с данным изобретением, рефлектор с боку не должен выступать за колеса транспортного средства, т.е. его не следует крепить на внешнюю часть рамы. Таким образом, для крепления рефлектора, как правило, не следует удалять с рамы монтажные и навесные детали, (или же совершать это исключительно в малом объеме), так как это способствует сокращению трудоемкости и экономии времени при проведении измерения и контроля рамы транспортного средства. Консоль рефлектора можно крепить в любом месте рамы (или на раме), где присутствует достаточно свободного места. По сравнению с уровнем техники, в данном случае имеется, куда большее количество участков рамы, на которых может потенциально располагаться консоль рефлектора, предназначенная для измерения рамы. Кроме того, рефлекторы, расположенные между ободами колес транспортного средства исключают измерительные ошибки (или сокращают их количество), возникающие при определенных деформациях рамы транспортного средства, что способствует высокой точности измерения геометрических характеристик рамы.
Кроме того, существует большое количество возможностей для оформления дальнейшего развития соответствующего данному изобретению способа и его схемы, но при этом следует, с одной стороны, учитывать надлежащие патентные притязания, а с другой стороны, нижеизложенное описание примера воплощения изобретения с учетом ссылки на чертеж. На чертежах показаны:
Фиг.1 - консоль рефлектора для применения по соответствующему данному изобретению способу измерения и контроля рамы транспортного средства,
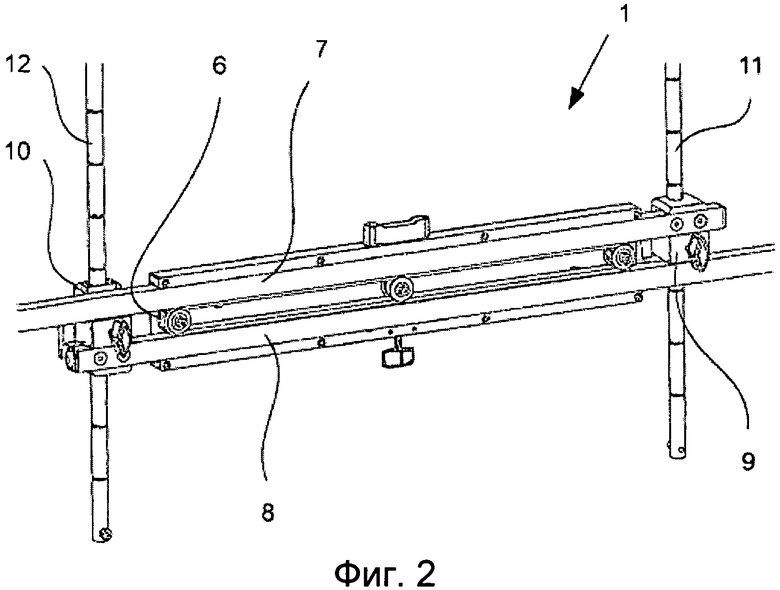
Фиг.2 - изображенной на Фиг.1 консоли рефлектора, вид сзади (после снятия плоской стальной крышки),
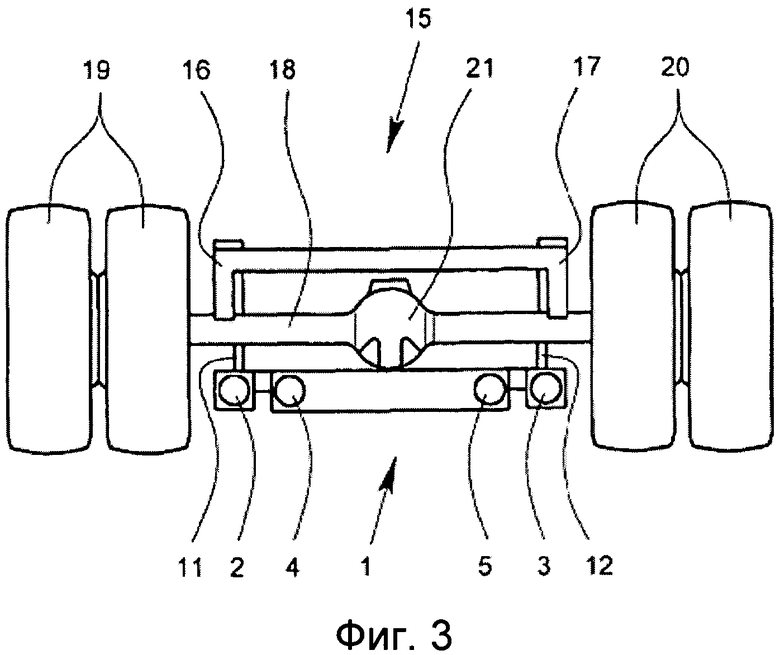
Фиг.3 - представленной на Фиг.1 консоли рефлектора в схематическом виде, в подвешенном на раму транспортного средства состоянии,
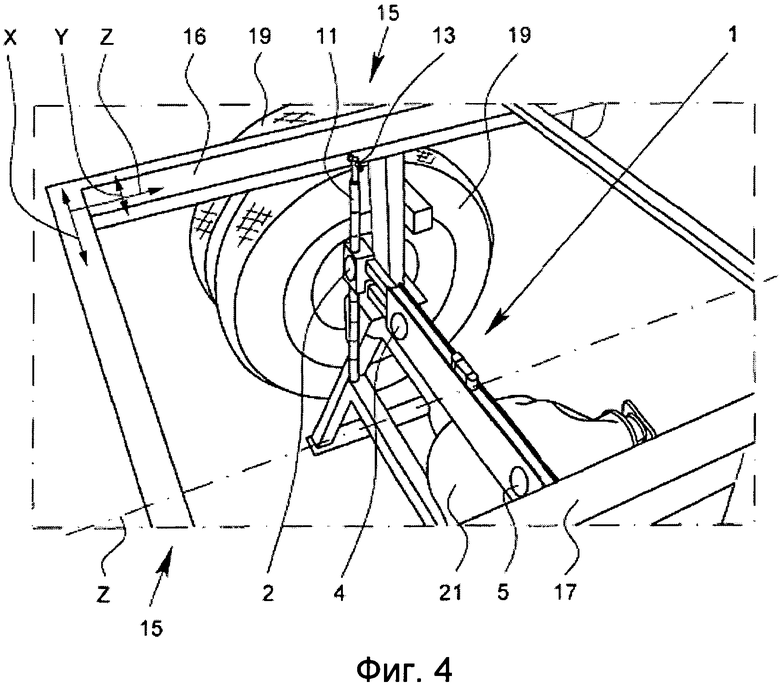
Фиг.4 - ракурс одной подвешенной на раму грузового автомобиля консоли рефлектора типа тех, что представлены на Фиг.1-3,
Фиг.5-9 - изображение измерительных величин координат положения рефлекторов, приведенных в Фиг.1-4 при измерении и контроле рамы грузового автомобиля,
Фиг.10, 11 - схематическое изображение проекции рефлекторов на плоскость изображения камеры измерительного устройства, которая может использоваться во время измерения и контроля, соответствующим данному изобретению,
Фиг.12 - снимок консоли рефлектора, произведенный во время измерения и контроля рамы транспортного средства.
На Фиг.1 изображена консоль рефлектора 1 с двумя внешними рефлекторами 2, 3 и двумя внутренними рефлекторами 4, 5. Из Фиг.2 следует, что изображенная на Фиг.1 консоль рефлектора 1 (вид сзади) при снятии плоской стальной крышки, имеет приводной ремень и две соединенные друг с другом горизонтальные рейки. Верхняя горизонтальная рейка 7 плотно соединена с коробчатым профилем 9, а нижняя горизонтальная рейка 8 плотно соединена с коробчатым профилем 10. Оба регулируемых по высоте коробчатых профиля 9, 10 направляются на вертикальные рейки 11, 12, причем верхняя горизонтальная рейка 7 направляется к коробчатому профилю 10, а горизонтальная рейка 8 - к коробчатому профилю 9. Если коробчатый профиль 10 вытягивается наружу с рейкой 12, то тогда автоматически, также коробчатый профиль 11 с правой горизонтальной рейкой 11 отодвигается в другую сторону посредством изменения направления приводного ремня 6. Такой же принцип реализуется посредством сцепленных с помощью шестерни зубчатых реек, которые соединены с вертикальными рейками 11, 12. Конструктивное оформление консоли рефлектора 1 допускает то, что оба внешних рефлектора 2, 3 регулируются по отдельности, а в горизонтальном направлении они перемещаются симметрично геометрической середине М между рефлекторами 2, 3.
Оба внутренних рефлектора 4, 5 располагаются на фиксированном расстоянии друг от друга, при этом внутренние рефлекторы 4, 5 постоянно находятся на одном и том же расстоянии от геометрической середины М между внешними рефлекторами 2, 3.
На горизонтальных рейках 11, 12 консоли рефлектора 1 предусмотрены средства 13, 14 для монтажа консоли 1 на раму 15, причем горизонтальные рейки 11, 12 находятся на лонжеронах рамы 16, 17. Это изображено схематически на Фиг.3 и в качестве ракурса на Фиг.4. В качестве альтернативы, может быть предусмотрено клеммное устройство для крепления консоли рефлектора 1 на раме 15, причем клеммное устройство может охватывать всю раму 15 и по потребности может быть расширено.
Рама 15 находится над расположенными на колесной оси 18 колесами 19, 20, которые находятся на опорной поверхности. Как, в частности, следует из Фиг.3, консоль рефлектора 1 в основном располагается в пределах ограниченного внутреннего пространства лонжеронов рамы 16, 17. В частности, внешние рефлекторы 2, 3 выступают наружу в зону колес 19, 20, т.е. они расположены вне зоны колес 19, 20, что и показано на Фиг.3. Консоль рефлектора предпочтительно располагается внизу перед дифференциалом 21.
В результате расположения всех рефлекторов 2, 3, 4, 5 в пределах рамы 15, возможно проведение измерения и контроля рамы, которое не требует больших временных затрат и является нетрудоемким, причем консоль рефлектора 1 может быть, по потребности, расположена на любой точке рамы 15, на которой возможно навесить ее на лонжероны рамы 16, 17. В остальном, сокращение количества измерительных ошибок при измерении рамы обеспечивается за счет сравнительно малой длины консоли рефлектора 1, т.е. за счет сравнительно короткого расстояния между внешними рефлекторами 2, 3.
В дальнейшем, с помощью Фиг.5-9, объясняется способ измерения и контроля рамы 15. Сначала консоль рефлектора 1 подвешивается на различные точки измерения, на лонжероны рамы 16, 17 в направление вдоль рамы Z. Консоль рефлектора 1 не имеет далеко выступающих наружу деталей и может быть подвешена под рамой 15. Вследствие этого, для проведения измерения и контроля рамы 15, необходимо удалить монтажные части рамы 15. Консоль рефлектора 1 может быть подвешена там, где имеется походящее свободное место. В тех местах, где рама 15 повреждена, можно выбрать измерительные расстояния на раме 15, которые являются более короткими, чем расстояния на неповрежденной части рамы 15.
Перед консолью рефлектора 1, т.е. перед рамой 15 располагается источник излучения (лазер) и оснащенное приемником излучения (камерой) измерительное устройство. Импульс источника излучения посылается в направлении рамы 15, на консоль рефлектора 1. В большинстве случаев, не обязательно точно направлять источник излучения на консоль рефлектора 1. В частности, не предусматривается и точного направления камеры на геометрическую продольную середину оси рамы 15. При этом внешний рефлектор 2 закрепляется на лонжероне рамы 16, а внешний рефлектор 3 на лонжероне рамы 17. Посредством навески консоли рефлектора 1 над горизонтальной рейкой 11 на лонжеронах рамы 16, 17, обеспечивается то, что внешние рефлекторы 2, 3 находятся ниже лонжеронов рамы 16, 17. Вследствие раздвижки и сдвижения горизонтальных реек 11, 12, расстояние между внешними рефлекторами 2, 3 может устанавливаться в соответствии с фактической шириной рамы 15, т.е. на расстояние лонжеронов рамы 16, 17. В результате, при измерении рамы 15 в направлении вдоль рамы Z, каждый рефлектор 2, 3 следует направлению вдоль предназначенного ему лонжерона рамы 16, 17.
Измерительное устройство для измерения и контроля рамы 15 может иметь несколько инфракрасных светоизлучающих диодов, которые, например, могут излучать длину волны 850 нм под углом ±15°. Для приема, отражаемого от рефлекторов 2, 3, 4, 5 света, предусмотрена цифровая камера. Камера может состоять из объектива и цифрового чипа. Объектив, посредством оптического изображения, формирует снимок всех отражаемых объектов, которые передаются на чип. Зона охвата может быть, к примеру, ±1,5°. Сверх того, предусмотрены электронные устройства, которые состоят из системы оснащенных памятью микропроцессоров, причем цифровые изображения, находящиеся на чипе камеры, могут считываться системой микропроцессоров.
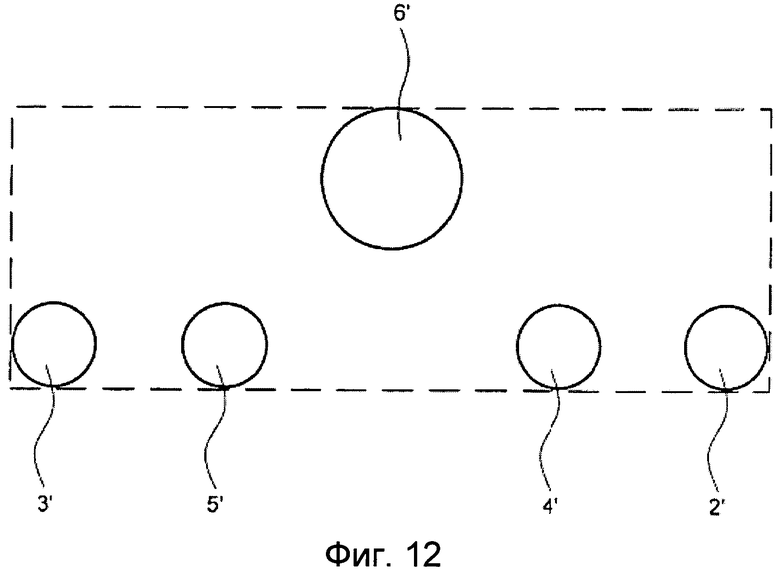
С помощью камеры, электронные устройства осуществляют два снимка, управляя при этом инфракрасной подсветкой: снимок первого изображения производится без подсветки, а снимок второго - с подсветкой. Излучаемый свет отражается рефлекторами 2, 3, 4. 5, так, что на втором снимке они появляются в качестве светлых кругообразных участков 2', 3', 4', 5'. Съемка изображения с подсветкой демонстрируется на Фиг.12. К тому же, осуществляется образование разницы обоих изображений, так что видимыми являются только подсвеченные рефлекторы 2, 3, 4, 5. В результате этого способа, отфильтровывается, постоянный свет (солнечный свет). Дополнительно, перед камерой можно установить фильтр дневного света, который будет с помощью длины волны в видимой области, отфильтровывать свет на оптическом пути, например так, как это осуществляется с помощью люминесцентной лампы.
Электронные устройства автоматически определяют на снимке светлые участки 2', 3', 4', 5'. Для этого, сначала определяются все белые участки 2', 3', 4', 5', 6'. Точка изображения считается "белой" тогда, когда она переступает определенное пороговое значение, а в других случаях, она рассматривается как "черная". Если снимок содержит более четырех белых участков 2', 3', 4', 5', 6', то тогда следует вычислить, какие из участков 2', 3', 4', 5' являются приемлемыми, (т.е. относящимися к отражению излучения на рефлекторы 2, 3, 4, 5) и какой участок 6' недоступен, т.е. он относится к отражению другой части рамы или какому-либо другому объекту в зоне рамы 15.
Лучи источника излучения отражаются от рефлекторов 2, 3, 4, 5 на приемник излучения, при этом с помощью соответствующего алгоритма определяются координаты месторасположения рефлекторов 2, 3, 4, 5 на различных точках измерения в направлении вдоль рамы Z. Расстояние между консолью рефлектора 1 и измерительным устройством в направлении вдоль рамы Z определяется с помощью излучения, которое отражается на приемнике излучения от внутренних рефлекторов 4, 5. Излучение, отражаемое на приемник излучения от внешних рефлекторов 2, 3, служит для определения координат месторасположения рефлекторов 2, 3 в поперечном Х- и У-направлении.
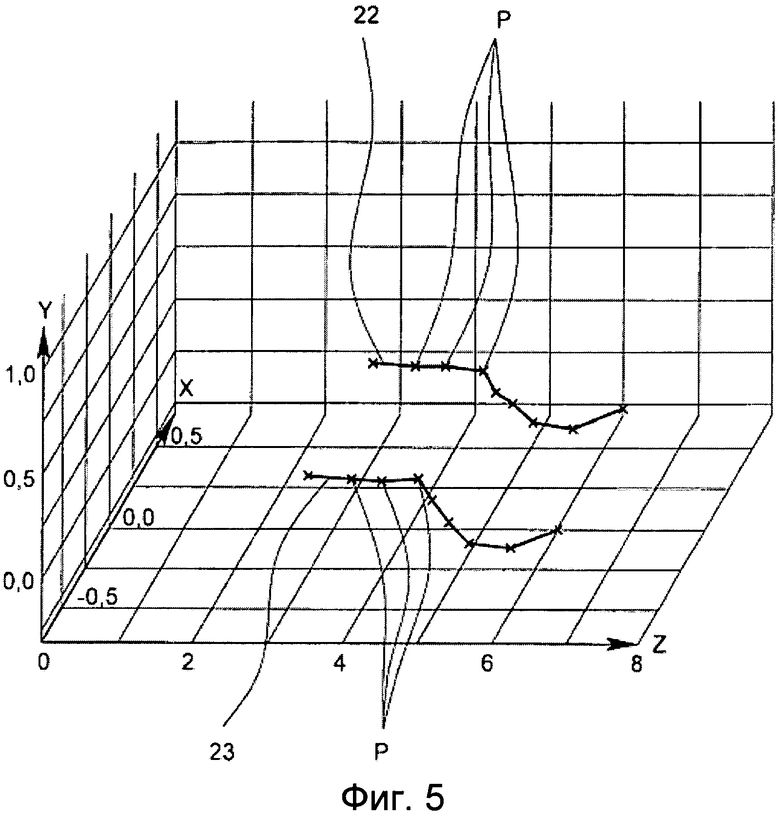
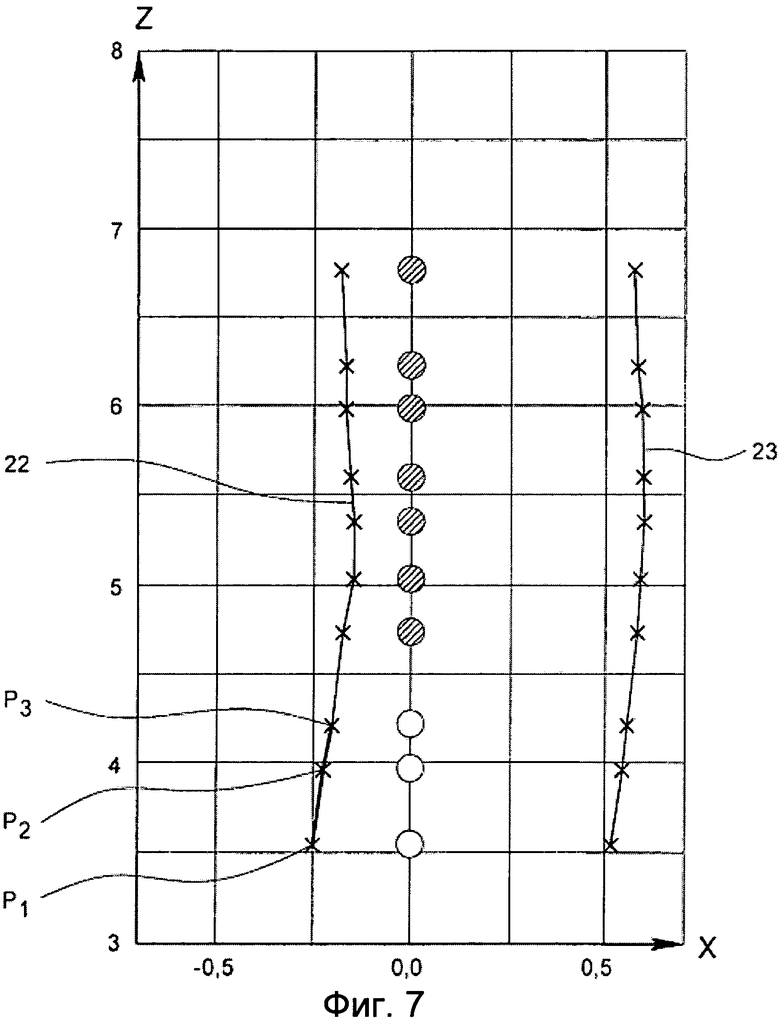
Результат измерения рамы 15, т.е. координаты положения (Х-, У, Z-координаты) внешних рефлекторов 2, 3 показаны на Фиг.5 в виде диаграммы как точки измерения Р, сохраняя при этом верхнюю линию 22 (путем соединения точек измерения Р в направление вдоль рамы Z, установленных с помощью координат положения внешнего рефлектора 2), и нижнюю линию (путем соединения точек измерения Р в направление вдоль рамы Z, установленных с помощью координат положения внешнего рефлектора 3).
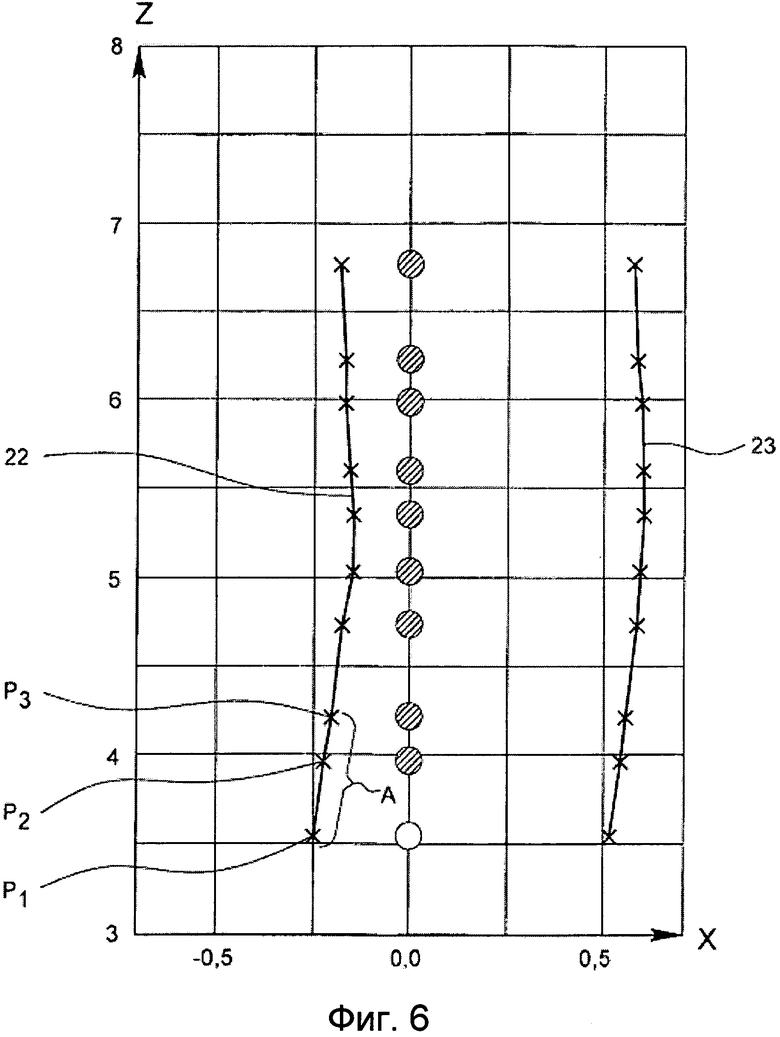
Как следует из Фиг.6 и 7, по данным образованного пространства плоскости, рассчитанной с помощью данных направления вдоль рамы Z и горизонтального поперечного направления X, ниже, по результатам точек измерения Р, будет определен линейный участок 24.
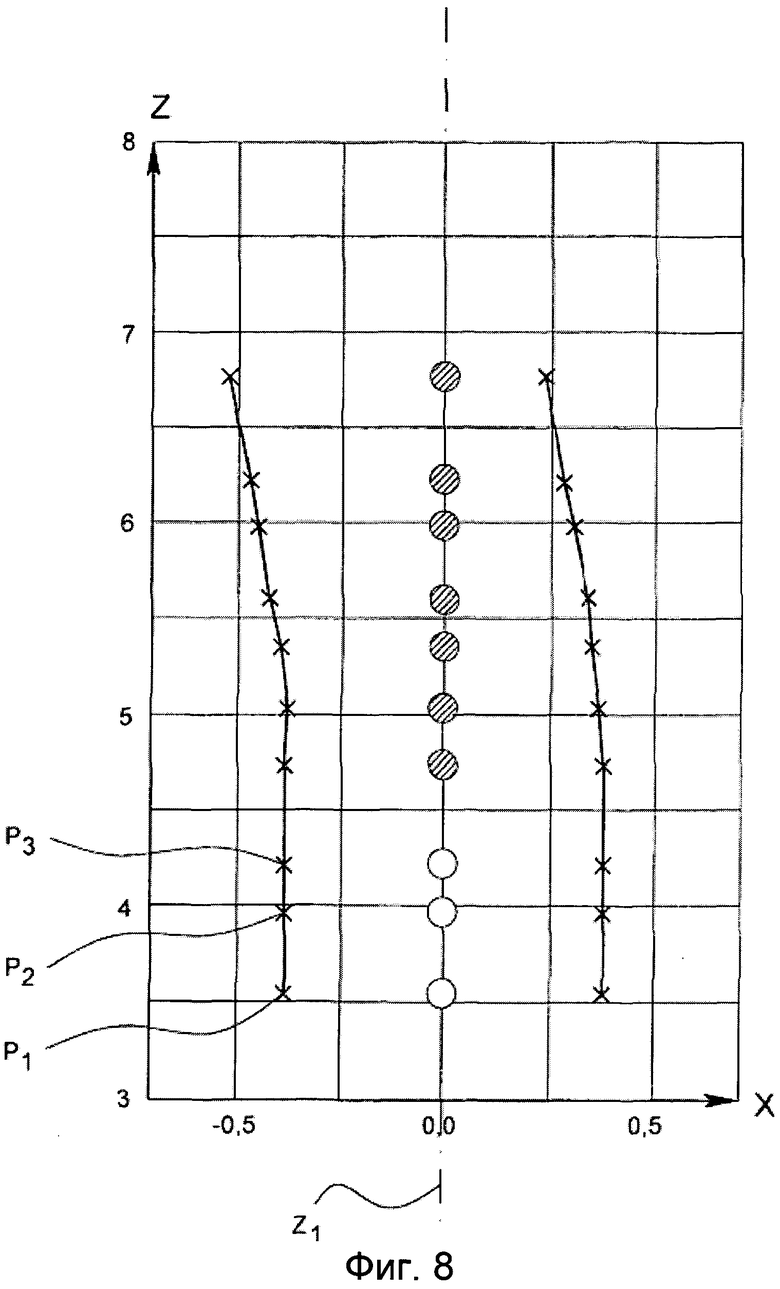
Линейный участок 24 определяется при помощи, по меньшей мере, двух точек измерения Р, которые были рассчитаны на недеформированном (неповрежденном) участке части А рамы 15. В соответствии с Фиг.6 и 7, это находящиеся на одной общей прямой первые три точки измерения P1 и Р2. Ограниченный первой точкой измерения P1 и третьей точкой измерения Р3 линейный участок 24 служит для выверки всех точек измерения Р, что осуществляется посредством сравнения Фиг.7 с Фиг.8.
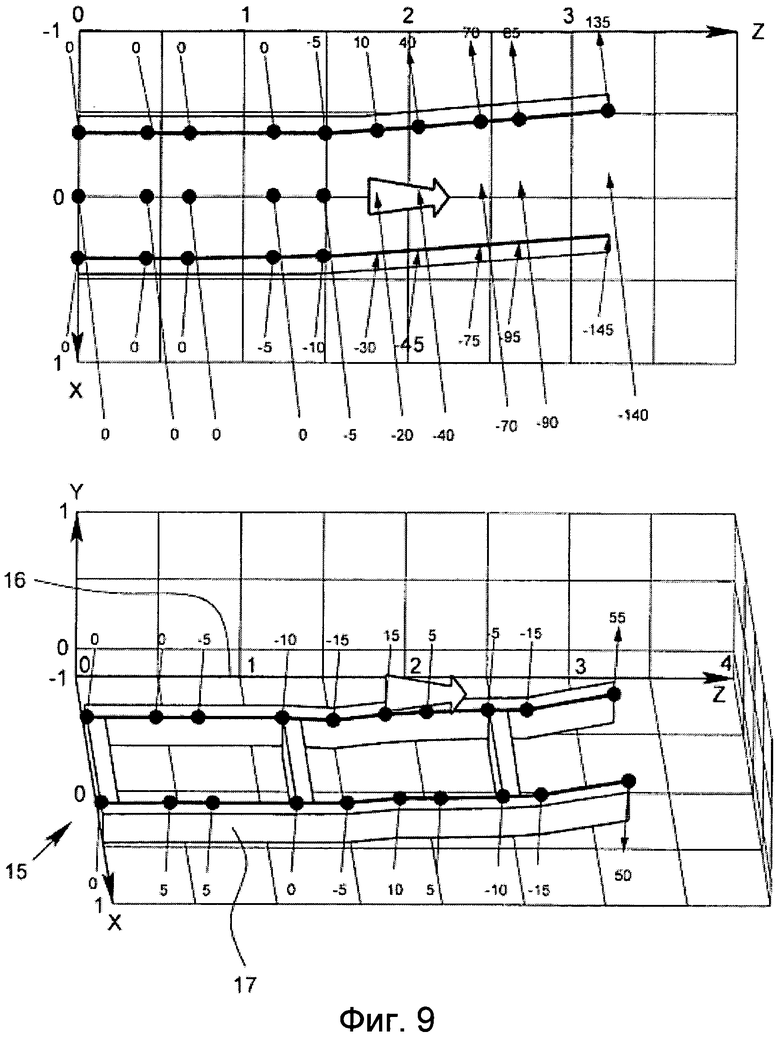
В соответствии с Фиг.8, по установленным данным пар точек измерения P1-P2 двух внешних рефлекторов 2, 3, предназначенных для определения линейного участка 24,определяется геометрическая осевая линия Z1 в плоскости пространства X-Z и соответствующее отклонение точек измерения Р в горизонтальном направлении Х от геометрической осевой линии Z1, что изображено на Фиг.9. Не изображено то, что в большинстве случаев, также определяются геометрическая осевая линия-, в Y-Z плоскости и соответствующее отклонение точек измерения Р в вертикальном направлении У от геометрической осевой линии плоскости У-Z.
В результате, описанный способ представляет возможность для произвольного по отношению к фактической геометрической осевой линии Z1 рамы 15 расположения измерительного устройства, снабженного источником и приемником излучения для измерения рамы 15, при соблюдении минимального расстояния от рефлектора 1, причем осевая линия Z1 выводится из характеристики геометрических точек измерения в X-Z-направлении. Таким же образом, из характеристики точек измерения в X-Z-направлении, может быть выведена осевая линия в Y-Z плоскости. В результате, предоставляется возможность проведения высокоточного и нетрудоемкого измерения и контроля рамы 15, которое не требует особых временных затрат.
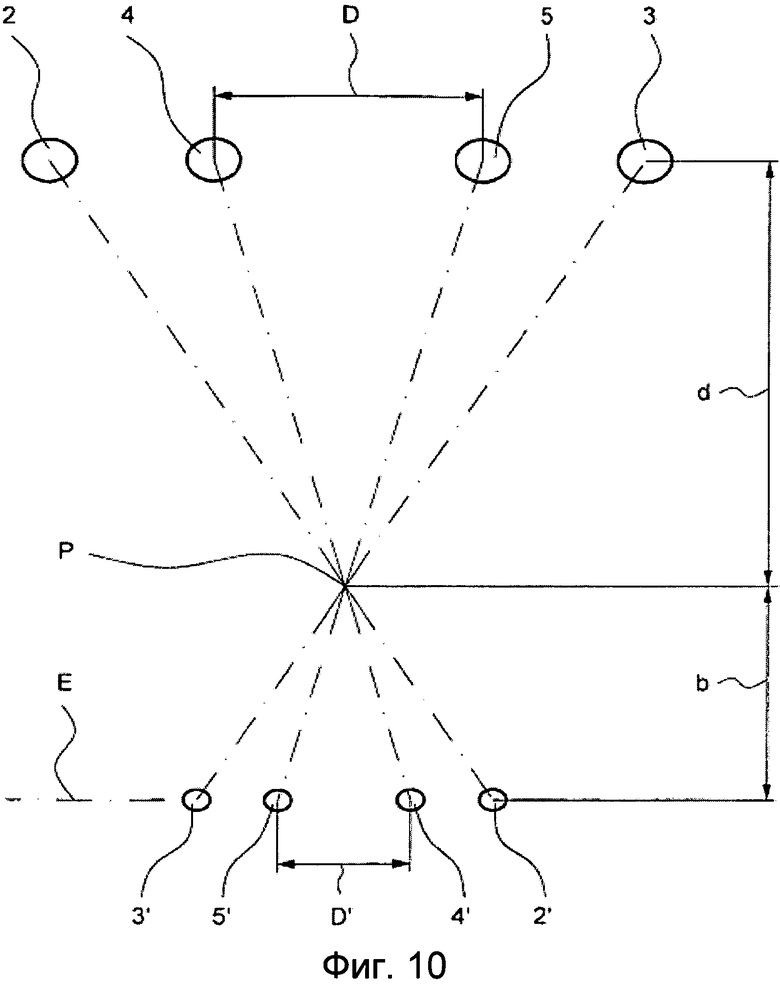
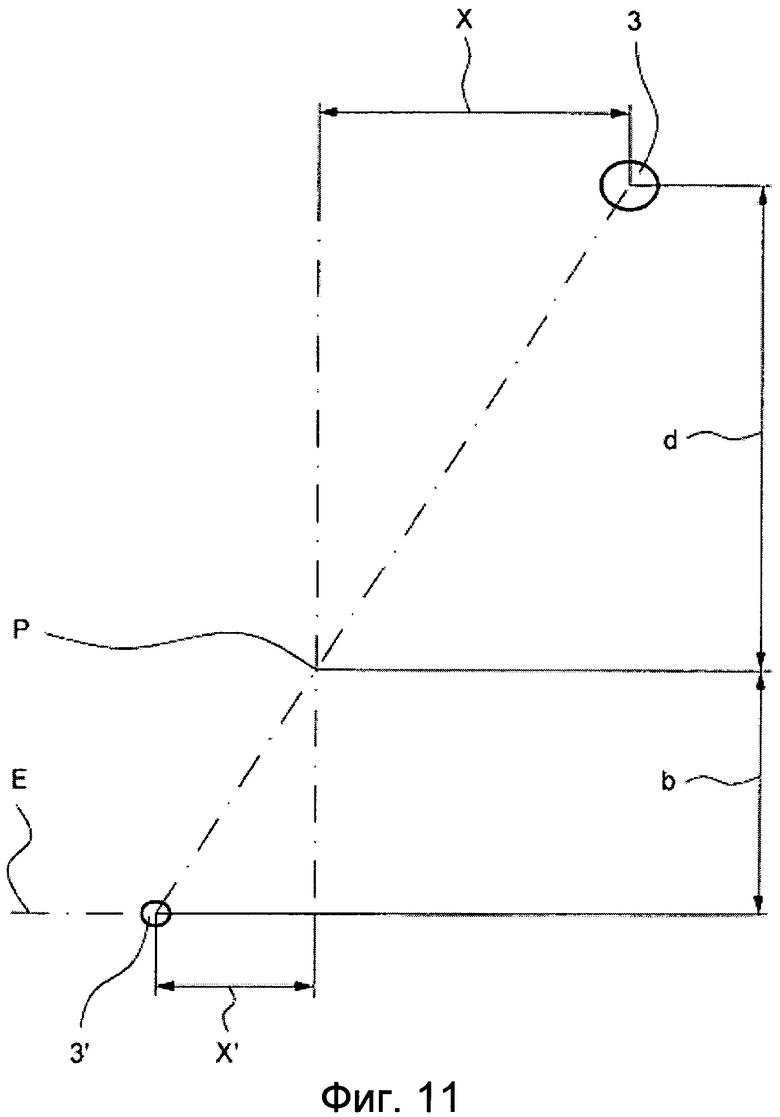
На основании Фиг.10-12, ниже будут объяснены определение координат рефлекторов 2, 3, 4, 5 и удаление неприемлемых участков 6', которые содержаться на снимке консоли рефлектора 1, снятой посредством камеры измерительного устройства. Фиг.10 и 11 схематически демонстрируют проекцию рефлекторов 2, 3, 4, 5 на плоскость изображения камеры Е. При этом камера имеет исходную точку проекции Р. Применение теоремы Фаллеса ведет к равенству следующих соотношений, в соответствии общему соотношению (I):
где d - расстояние несущей конструкция рефлектора 1 - камера (исходная точка проекции Р),
b - фокусное расстояние камеры (известное),
D - расстояние внутренних рефлекторов 4, 5 (известное)
D'- расстояние белых участков 4', 5' на снимке (определяется автоматически).
Искомое расстояние d консоли рефлектора 1 от камеры определяется посредством уравнения (II):

В соответствии с Фиг.11 теорема Фаллеса ведет к равенству следующих соотношений согласно уравнению (III):

где d - расстояние несущей конструкция рефлектора 1 - камера (исходная точка проекции Р),
b - фокусное расстояние камеры (известное),
Х - Х-координата, напр., внешнего рефлектора 3 (расстояние до измерительной оси),
X' - Х-координата внешнего белого участка 3' на снимке (расстояния до центральной части изображения).
Из этого следует Х-координата, напр., для внешнего рефлектора 3, из уравнения

У-координата, напр., внешнего рефлектора 3 аналогичным способом следует из нижестоящего уравнения (V):
где У - У-координата, напр., внешнего рефлектора 3 (расстояние до измерительной оси),
У' - У-координата внешнего белого участка 3' на снимке (расстояния до центральной части изображения).
С помощью Фиг.12, ниже будут описаны возможности "удаления" со снимка неприемлемого участка 6', т.е. возможности не принимать его во внимание при определении координат месторасположения рефлекторов 2, 3, 4, 5. Фиг.12 схематически демонстрирует снимок консоли рефлектора 1, причем отраженное излучение рефлекторов 2, 3, 4, 5 появляется на снимке в качестве кругообразных белых участков 2', 3', 4', 5'. Сверх того, на снимке присутствует кругообразный участок 6', который согласно данному изобретению является "неприемлемым". Он относится не к отраженному излучению рефлекторов 2, 3, 4, 5, а к отражению не принадлежащего системе измерений объекта в зоне рамы 15. Возникновение неприемлемого участка 6' может быть, например, вызвано отражением излучения от неизолированных частей рамы 15.
Удаление неприемлемого участка 6' преимущественно происходит на основе геометрических данных имеющихся на снимке приемлемых участков 2', 3', 4', 5'. Рефлекторы 2, 3, 4, 5 на консоли рефлектора 1 являются одинаковыми по размеру, кругообразными и находятся на одной линии. В соответствии с этим, присутствующие на снимке белые участки 2', 3', 4', 5', которые относятся к отражению излучения рефлекторов 2, 3. 4, 5. находятся на одной линии. "Приемлемые", присутствующие на снимке белые участки 2', 3', 4', 5' могут быть теми, которые являются кругообразными и к которым относятся три следующих существующих идентичных по величине участка 2', 3', 4', 5', которые также находятся на одной линии вместе с тремя следующими участками 2', 3', 4', 5'.
Приемлемые участки 2', 3', 4', 5' являются, в основном, кругообразными. Их соотношение высоты к ширине составляет примерно 1. Если соотношение, к примеру, меньше чем 0,75 или больше чем 1,35, то такой неприемлемый участок 6' может быть удален.
На кругообразном приемлемом участке 2', 3', 4', 5', соотношение площади с шириной и высотой приемлемого участка 2', 3', 4', 5' составляет примерно 0,79. Если соотношение, к примеру, меньше чем 0,6 то такой неприемлемый участок 6' может быть удален. Таким образом, учитываются отклонения геометрической формы приемлемых участков 2', 3', 4', 5' от идеальной окружности, в частности в зависимости от расстояния до консоли рефлектора 1.
В качестве альтернативы или дополнения для удаления неприемлемого участка 6' может быть предусмотрено определение количества участков, идентичных по размеру каждому участку 2', 3', 4', 5', 6', размер которых находится между 50% и 150% определенного участка 2', 3', 4', 5', 6'. Если количество идентичных по размеру участков меньше числа 3, то тогда такой участок 6' считается неприемлемым в соответствии с данным изобретением и поэтому он не учитывается при определении координат положения несущих конструкций рефлектора 2, 3, 4, 5.
Для вычисления неприемлемого участка 6' может быть предусмотрено определение (четырех) белых участков 2', 3', 4', 5'. Они лежат на одной прямой или находятся в соотношении с одной прямой. Изображенные на Фиг.12 пять белых участков 2', 3', 4', 5', 6', в качестве примера, имеют следующие координаты:
Исходя от каждого белого участка 2', 3', 4', 5', 6' к каждому другому белому участку 2', 3', 4', 5', 6' образуются два различных вектора.
На белом участке 2' образуются следующие векторы:
2'→3' (т.е от участка 2' к участку 3')
2'→4'
2'→5'
2'→6'
От этих векторов так образуются все возможные комбинации, что комбинация в обратном порядке не представляется возможной. На белом участке 2' образуются, напр., следующие 6 комбинаций:
2'→3' и 2'→4'
2'→3' и 2'→5'
2'→3' и 2'→6'
2'→4' и 2'→5'
2'→4' и 2'→6'
2'→5' и 2'→6'
Посредством общего представления данных (x1|y1) и (x2|y2) и данных для векторов 1, 2, для каждой комбинации, с помощью уравнения (VI), рассчитывается сумма s:
При этом речь идет о сумме s косинуса, который был образован посредством скалярного произведения. Таким образом, рассматривается острый угол, образующийся между векторами. Чем ближе определенное значение к 1, тем меньше является угол между векторами. Определенные значения для всех 20 белых участков 2', 3', 4', 5', 6' представлены в таблице. Для участка 2', напр., следует:
Участок 2':
Не образовавшиеся векторы и не рассмотренные комбинации обозначены с помощью горизонтального штриха. Например, вектор 2'→2' не может быть образован, так как речь идет о начальной и конечной точке одного и того же белого участка 2'. Запрещено привлекать два одинаковых вектора. Поэтому напр. комбинация 2'→3' и 2'→3' рассматриваться не будет. Если, напр., элемент 2'→3' и 2'→4' уже существует, то вводить эту запись повторно запрещается.
Находящиееся в самом верху 4 белых участка 2', 3', 4', 5' расположены на одной прямой, т.е. имеют минимальное расстояние до прямой. Белый участок 6' считается "неприемлемым" в соответствии с данным изобретением и поэтому он не учитывается при определении координат положения несущих конструкций рефлектора 2, 3, 4, 5.
Для дальнейшего повышения уровня безопасности, только между участками 2', 3', 4', 5' (с допуском ±5%) могут быть образованы векторы, имеющие идентичный размер. Так как рефлекторы 2, 3, 4, 5 приблизительно горизонтально расположены на консоли рефлектора 1, то рассматриваться могут преимущественно только те векторы, которые образуют с горизонтальной линией угол меньше 18°. Эти мероприятия сокращают объем вычислений при определении приемлемых участков 2', 3', 4', 5' и неприемлемых участков 6', вследствие сокращения количества рассматриваемых комбинаций.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ ДЛИННОМЕРНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2670570C1 |
| СПОСОБ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ УСТАНОВКИ КОЛЕС И ПОЛОЖЕНИЯ ОСЕЙ И МОСТОВ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2314492C1 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ОБЪЕМА ДВИЖУЩЕГОСЯ ГРУЗА, ИМЕЮЩЕГО СЛОЖНУЮ ГЕОМЕТРИЧЕСКУЮ ФОРМУ | 2020 |
|
RU2734085C1 |
| СПОСОБ ОСУЩЕСТВЛЕНИЯ МОНИТОРИНГА УЛИЧНО-ДОРОЖНОЙ СЕТИ ПОСРЕДСТВОМ ПЕРЕДВИЖНОЙ ДОРОЖНОЙ ЛАБОРАТОРИИ И ФУНКЦИОНАЛЬНЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2373324C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДЕФОРМАЦИИ КУЗОВА АВТОМОБИЛЯ ПРИ ДОРОЖНО-ТРАНСПОРТНОМ ПРОИСШЕСТВИИ | 2005 |
|
RU2291798C2 |
| Способ определения параметров геометрии рельсовой колеи и система для его осуществления | 2018 |
|
RU2686341C1 |
| СПОСОБ АТТЕСТАЦИИ ТЕЛЕСКОПА | 1988 |
|
RU2036492C1 |
| СПОСОБ СБОРКИ МОДУЛЬНЫМ СПОСОБОМ КЕССОНА КОНСОЛИ КРЫЛА ТЯЖЕЛОГО ТРАНСПОРТНОГО САМОЛЕТА С ДЕТАЛЯМИ ИЗ УГЛЕРОДНЫХ ПОЛИМЕРНЫХ КОМПОЗИЦИОННЫХ МАТЕРИАЛОВ И МЕТАЛЛОВ И СБОРОЧНАЯ ЛИНИЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА СБОРКИ | 2023 |
|
RU2836920C1 |
| СПОСОБ МАСШТАБИРОВАНИЯ СНИМКОВ ФОТОПЛАНИМЕТРИЧЕСКОЙ СЪЕМКИ ГОРИЗОНТАЛЬНЫХ ГОРНЫХ ВЫРАБОТОК | 2020 |
|
RU2791080C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЛОКАЛЬНЫХ УЧАСТКОВ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ С МАКСИМАЛЬНОЙ ДЕФОРМАЦИЕЙ | 2004 |
|
RU2272248C1 |
Группа изобретений относится к области транспортного машиностроения. Способ измерения и контроля рамы грузового автомобиля или автобуса заключается в том, что измерительное устройство располагают перед рамой, а излучение от источника направляют на раму и на консоль рефлектора. Рефлектор закрепляют на одной из частей рамы. Излучение отражается от рефлектора на приемник излучения. Измерительное устройство вычисляет координаты положения рефлектора в различных точках измерения рамы. Расстояние между внешними рефлекторами регулируют таким образом, чтобы рефлекторы имели одинаковое постоянное расстояние до геометрической середины консоли рефлектора. Внешние рефлекторы закрепляют на предусмотренных противолежащих продольных частях рамы. Координаты местоположения рефлекторов определяют синхронным способом. Установка для измерения и контроля рамы грузового автомобиля или автобуса содержит консоль рефлектора, содержащую рефлектор, измерительное устройство с источником и приемником излучения и вычислительное устройство. Достигается повышение точности измерения рамы транспортного средства. 2 н. и 5 з.п. ф-лы, 12 ил.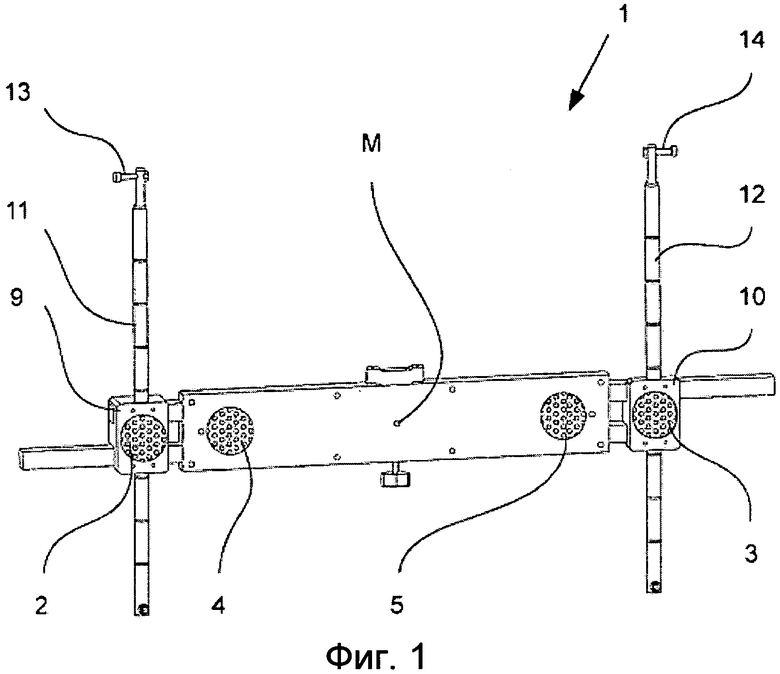
1. Способ измерения и контроля рамы транспортного средства (15), в частности рамы грузового автомобиля или автобуса, в котором измерительное устройство, содержащее источник и приемник излучения, располагается перед рамой (15), а излучение от источника направляется на раму (15) и на консоль рефлектора (1), снабженную, по меньшей мере, одним рефлектором (2, 3, 4, 5), причем этот рефлектор (2, 3, 4, 5) закрепляется на одной из частей рамы (15), при этом излучение отражается от рефлектора (2, 3, 4, 5) на приемник излучения, а измерительное устройство вычисляет координаты положения рефлектора (2, 3, 4, 5) в различных точках измерения рамы, определяя при этом из полученных точек измерения (Р), существенно недеформированный отрезок (А) рамы и отклонение полученных точек измерения (Р) от недеформированного отрезка (А), отличающийся тем, что консоль рефлектора (2) имеет первый внешний рефлектор и противолежащий в горизонтальном поперечном направлении второй внешний рефлектор (3), причем расстояние между внешними рефлекторами (2, 3) регулируется таким образом, что рефлекторы (2, 3) имеют одинаковое постоянное расстояние до геометрической середины консоли рефлектора (1), при этом оба внешних рефлектора (2, 3) закрепляются на предусмотренных противолежащих продольных частях рамы (15), причем координаты местоположения рефлекторов (2, 3, 4, 5) определяются синхронным способом.
2. Способ по п.1, отличающийся тем, что геометрическая осевая линия (Z2) рамы (15) определяется с помощью совместно вычисленных точек измерения (P1, Р3, Р2) обоих внешних рефлекторов (1, 3).
3. Способ по п.1 или 2, отличающийся тем, что координаты месторасположения рефлекторов (2, 3) определяются на различных расстояниях в направлении вдоль рамы (3).
4. Способ по п.1 или 2, отличающийся тем, что рефлектор (2, 3, 4, 5) закрепляется в пределах ограниченной внешними поверхностями рамы зоны.
5. Установка для измерения и контроля рамы транспортного средства, в частности рамы грузового автомобиля или автобуса, которая содержит консоль рефлектора (1), содержащую, по меньшей мере, один рефлектор (2, 3, 4, 5), и измерительное устройство с источником и приемником излучения, а также с вычислительным устройством, которая предназначена для реализации способа по одному из предыдущих пунктов, причем при перемещении консоли рефлектора (1) обеспечивается одинаковое расстояние от внешних рефлекторов (2, 3) до геометрической середины консоли рефлектора (1).
6. Установка по п.5, отличающаяся тем, что консоль рефлектора (1) имеет два находящихся на фиксированном расстоянии друг от друга р стационарных рефлектора (4, 5), причем внутренние рефлекторы (4, 5) имеют одинаковое константное расстояние до геометрической середины несущей конструкции рефлектора (1).
7. Установка по п.6, отличающаяся тем, что внутренние рефлекторы (4, 5) и внешние рефлекторы (2, 3) располагаются на одной оси, и/или обеспечено синхронное вертикальное перемещение рефлекторов (2, 3, 4, 5).
| US 2008072444 A1,27.03.2008 | |||
| US 5207002 A, 04.05.1993 | |||
| Устройство для испытаний поперечины автомобильной рамы | 1972 |
|
SU499514A1 |

