ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к установке для транспортировки и сортировки, выполненной с возможностью сообщаемого в поперечном направлении скольжения и сортировки транспортируемого объекта посредством силы тяжести на позиции сортировки, заданной на пути транспортировки транспортируемого объекта.
УРОВЕНЬ ТЕХНИКИ
[0002] В качестве установки для транспортировки и сортировки, о которой шла речь выше, как описано в патентном документе 1, известна установка для транспортировки и сортировки, включающая в себя множество модулей наклоняемых конвейеров, расположенных в ряд в направлении транспортировки, причем каждый из модулей наклоняемых конвейеров опирается с возможностью качания влево и вправо вокруг опорного вала, параллельного направлению транспортировки транспортируемого объекта, между горизонтальной ориентацией для транспортировки и ориентацией под наклоном для выпуска транспортируемого объекта поперечно по отношению к направлению транспортировки транспортируемого объекта посредством силы тяжести, электродвигатель привода конвейеров , выполненный с возможностью привода наклоняемых конвейеров для транспортируемого объекта, выдаваемого в каждый из модулей наклоняемых конвейеров, и электродвигатель наклона, выполненный с возможностью переключения каждого из модулей наклоняемых конвейеров между горизонтальной ориентацией для транспортировки и ориентацией под наклоном.
ПЕРЕЧЕНЬ ЦИТИРУЕМЫХ ДОКУМЕНТОВ
Патентные документы
[0003] Патентный документ 1: Перевод на японский язык международной заявки № 2015-501770 (Kohyo)
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Техническая задача
[0004] В вышеописанном патентном первоисточнике 1 описано, что в качестве средства переключения каждого модуля наклоняемого конвейера между горизонтальной ориентацией для транспортировки и ориентацией под наклоном вокруг оси, параллельной направлению транспортировки, предусмотрен исполнительный механизм наклона, предназначенный для наклона каждого модуля наклоняемого конвейера, и что привод фрикционных лент для транспортировки транспортируемого объекта, доставляемого к каждому модулю наклоняемого конвейера, осуществляет электродвигатель, крепящийся к модулю наклоняемого конвейера (наклоняемый компонент). Иными словами, описана конфигурация, в которой электродвигатель привода конвейеров, выполненный с возможностью привода транспортирующих конвейеров, предусмотренный для модуля наклоняемого конвейера, крепится ко всем модулям наклоняемых конвейеров, вынуждаемым совершать качание между горизонтальной ориентацией для транспортировки и ориентацией под наклоном. В этой конфигурации требуется не только такое же количество электродвигателей привода конвейеров, как количество модулей наклоняемых конвейеров, но и система подачи электропитания для электродвигателя привода конвейеров, прикрепленного к модулю наклоняемого конвейера, качания которого требуют гибкого кабеля подачи электропитания, имеющего длину, которая не помешает качательному движению модуля наклоняемого конвейера, или требуют некоторого альтернативного средства, например - дугообразного токонесущего рельса, концентричного с находящимся на оси качания центром модуля наклоняемого конвейера, и подающего электропитание контакта, находящийся в скользящем контакте с рельсом, и т.д., вследствие чего приходится учитывать проблему, заключающуюся в том, что стоимость становится чрезмерно высокой.
Решение задачи
[0005] В данном изобретении предложена установка для транспортировки и сортировки, способная решать традиционные проблемы, описанные выше. Чтобы облегчить понимание связи с вариантом осуществления, приводимыми в скобках позициями, употребляемыми в описании варианта осуществления, о котором пойдет речь ниже, характеризуется установка для транспортировки и сортировки в соответствии с данным изобретением, являющаяся установкой для транспортировки и сортировки транспортируемых объектов, включающей в себя множество модулей (10, 11) наклоняемых конвейеров, расположенных в ряд в направлении транспортировки, причем каждый из модулей (10, 11) наклоняемых конвейеров опирается с возможностью качания вокруг опорного вала (7), параллельного направлению транспортировки транспортируемого объекта, между горизонтальной ориентацией для транспортировки и ориентацией под наклоном для выпуска транспортируемого объекта - посредством силы тяжести - в направлении, поперечном по отношению к направлению транспортировки транспортируемого объекта, электродвигатель (20) привода конвейеров, выполненный с возможностью привода транспортирующих конвейеров (24a, 24b) для транспортируемого объекта, доставляемого к каждому из модулей (10, 11) наклоняемых конвейеров, и электродвигатель (12, 13) наклона, выполненный с возможностью переключения каждого из модулей (10, 11) наклоняемых конвейеров между горизонтальной ориентацией для транспортировки и ориентацией под наклоном, при этом опорный вал (7), образованный из единого взаимно блокируемого передаточного вала (19), имеющего длину, охватывающую всю зону, включающую в себя множество модулей (10, 11) наклоняемых конвейеров (зоны, состоящей из узлов 1A—1E), а транспортирующие конвейеры (24a, 24b) всех модулей (10, 11) наклоняемых конвейеров в этой зоне сочленены, будучи взаимно блокированными, со взаимно блокируемым передаточным валом (19), и для упомянутой зоны установлен один электродвигатель (20) привода конвейеров, а этот один электродвигатель (20) привода конвейеров осуществляет привод транспортирующих конвейеров (24a, 24b) всех модулей (10, 11) наклоняемых конвейеров в зоне посредством взаимно блокируемого передаточного вала (19).
Преимущества изобретения
[0006] В соответствии с конфигурацией данного изобретения, описанной выше, привод конвейеров для транспортировки транспортируемого объекта, предусмотренный для множества модулей наклоняемых конвейеров, может осуществлять один электродвигатель привода конвейеров, а опорный вал, который служит опорой каждому модулю наклоняемого конвейера, обеспечивая ему возможность качаться, также используется в качестве передаточного вала, требующегося для системы передачи, предназначенной для транспортирующих конвейеров каждого модуля наклоняемых конвейеров. Таким образом, стоимость оборудования можно значительно снизить. Кроме того, как в обычном случае, в котором электродвигатель привода конвейеров, предназначенный для привода транспортирующих конвейеров каждого модуля наклоняемого конвейера, крепится к модулю наклоняемого конвейера, который совершает качание, для системы подачи электропитания для электродвигателя привода конвейеров не требуется гибкий кабель подачи электропитания, имеющий длину, которая не мешает качательному движению модуля наклоняемого конвейера, или альтернативное средство подачи электропитания, состоящее из дугообразного токонесущего рельса и подающего электропитание контакта, находящегося в скользящим контакте с рельсом. Поэтому можно также снизить стоимость системы подачи электропитания и притом можно почти исключать вероятность отказа системы подачи электропитания, и т.д.
[0007] При осуществлении данного изобретения, о котором шла речь выше, ему можно придать такую конфигурацию, что для каждого из модулей (10, 11) наклоняемых конвейеров предусмотрен единственный приводной вал (32), сочлененный, будучи взаимно блокированным, с транспортирующими конвейерами (24a, 24b) и располагаемый над взаимно блокируемым передаточным валом (19) в ориентации параллельно направлению транспортировки транспортируемого объекта, и единственный приводной вал (32) и взаимно блокируемый передаточный вал (19), сочленены, будучи взаимно блокированными, с помощью навиваемого средства (33) передачи, и подшипники (8a—9b) для придания модулю наклоняемого конвейера (10, 11) опоры с возможностью качания вокруг взаимно блокируемого передаточного вала (19), прикрепленные к каждому из модулей (10, 11) наклоняемых конвейеров, и пассивный вращающийся элемент (38b, 39b), посаженное с возможностью относительного вращения на взаимно блокируемый передаточный вал (19) в положении рядом с подшипником (8a, 9b), прикреплен к подшипнику (8a, 9b), а вращающая сила выходного вала (36, 37) электродвигателя (12, 13) наклона, направление которой располагается в соответствии с каждым из модулей (10, 11) наклоняемых конвейеров, передается модулю наклоняемого конвейера (10, 11) с помощью навиваемого средства (38c, 39c) для передачи, натянутого между передаточным вращающимся элементом (38a, 39a), прикрепленным к выходному валу (36, 37), и пассивным вращающимся элементом (38b, 39b). В соответствии с этой конфигурацией, подшипник на стороне модуля наклоняемого конвейера, естественно требующийся для придания модулю наклоняемого конвейера опоры с возможностью качания вокруг взаимно блокируемого передаточного вала также используется в качестве элемента для восприятия вращающей силы выходного вала электродвигателя наклона, и тогда количество необходимых деталей можно сократить, делая всю конфигурацию в целом простой, и можно дополнительно снизить стоимость.
[0008] Кроме того, множество модулей (10, 11) наклоняемых конвейеров разделено на множество узлов (1A—1E), при этом два соседних модуля (10, 11) наклоняемых конвейеров составляют один узел. Опорой двум модулям (10, 11) наклоняемых конвейеров служит один опорный вал (7), оба концевых участка которого опираются на опорные элементы (14, 15, 17) посредством подшипников (5, 6) в каждом из узлов (1A—1E). Опорные валы (7) сочленены, будучи взаимно блокированными, друг с другом посредством соединения 18 между двумя соседними узлами (1A—1E), образуя взаимно блокируемый передаточный вал (19). Один электродвигатель (20) привода конвейеров расположен снаружи узла (1E), находящегося на одном конце. Два электродвигателя (12, 13) наклона, осуществляющие привод двух модулей (10, 11) наклоняемых конвейеров в каждом из узлов (1A—1E), можно установить так, что передаточные вращающиеся элементы (38a, 39a) движутся встречно друг другу в направлении вперед-назад на обеих - левой и правой, на виде в плане, сторонах взаимно блокируемого передаточного вала (19). В соответствии с этой конфигурацией, даже когда в качестве электродвигателя наклона для переключения ориентации каждого модуля наклоняемых конвейеров требуется редуктор скорости, оснащенный большим и длинным электродвигателем, обладающим большой тяговой способностью, два электродвигателя наклона можно без затруднений ввести в зону в пределах одного узла, располагая эти два электродвигателя наклона в некоторой точке симметричным (на виде в плане) образом, а узлу состоящему из двух модулей наклоняемых конвейеров, двух электродвигателя наклона, предназначенных для наклона обоих модулей наклоняемых конвейеров, и одного опорного вала (являющегося частью взаимно блокируемого передаточного вала), сочлененного, будучи взаимно блокированным, с транспортирующими конвейерами для транспортируемого объекта двух модулей наклоняемых конвейеров, можно придать компактную конфигурацию. Тогда, лишь за счет расположения множества узлов последовательно и соединения опорных валов (частей взаимно блокируемых передаточных валов) друг с другом посредством упомянутого соединения, и сочленения электродвигателя привода конвейеров, установленного на одном конце, будучи взаимно блокированным, с одним концом взаимно блокируемого передаточного вала, можно легко собрать установку для транспортировки и сортировки, имеющую некоторую габаритную длину некоторого интегрального множественного модуля наклоняемого конвейера.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
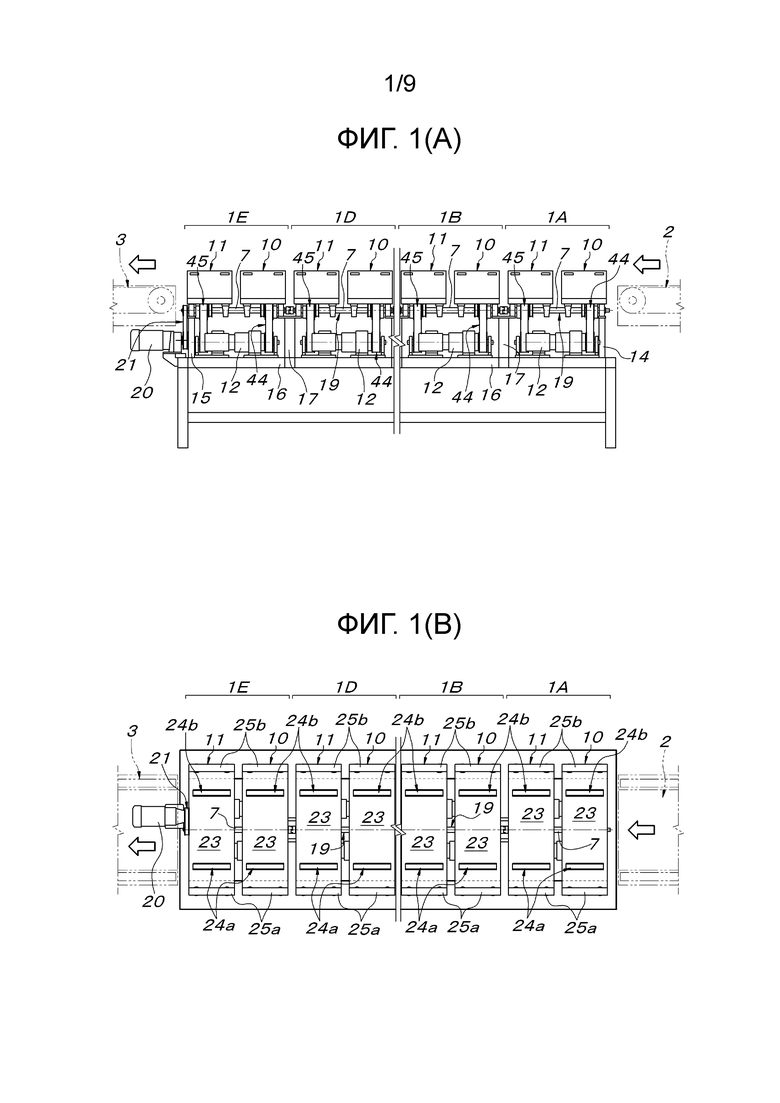
[0009] На фиг.1A представлен изображенный с частичными изъятиями вид сбоку установки для транспортировки и сортировки, а на фиг.1B представлен ее вид в плане.
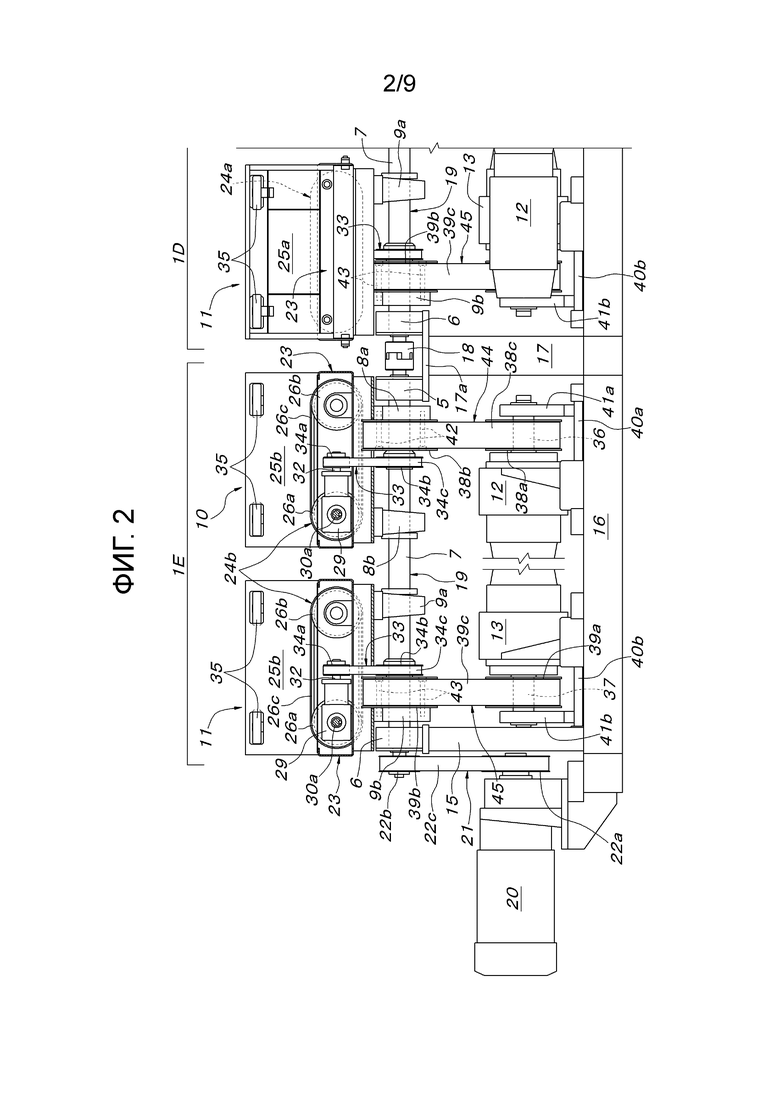
На фиг.2 представлен вид сбоку основной части, демонстрирующий зону стороны выхода установки для транспортировки и сортировки.
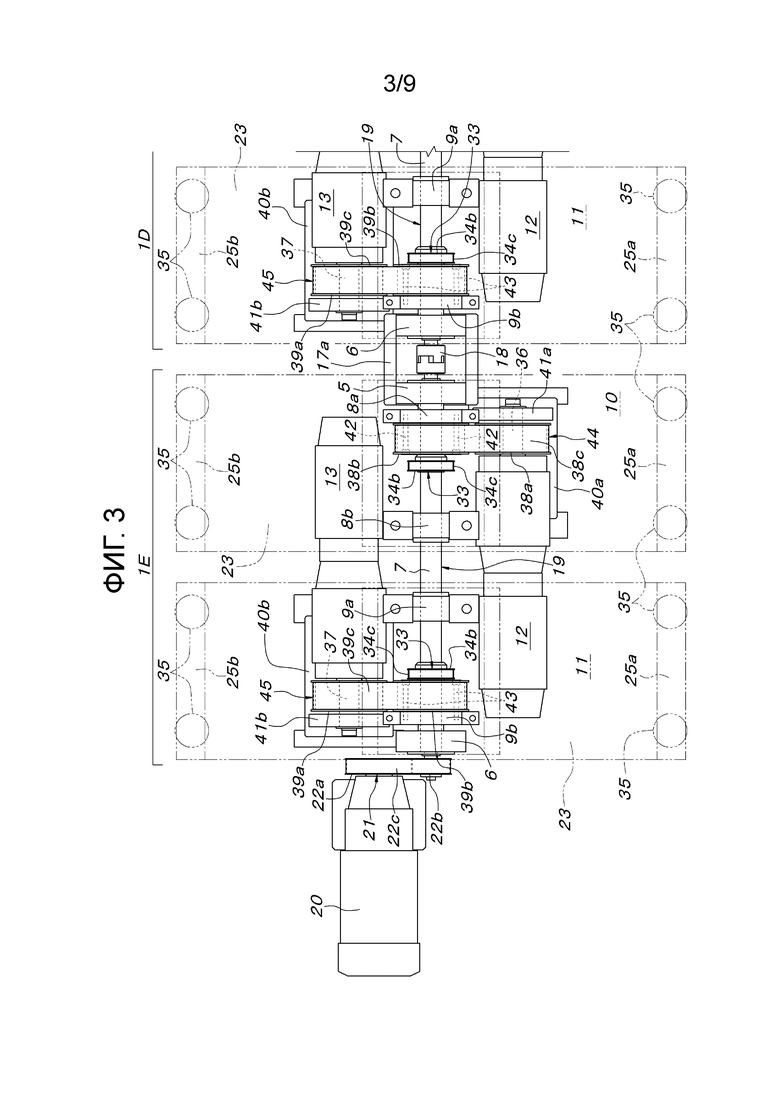
На фиг.3 представлен вид в плане основной части, демонстрирующий зону стороны выхода установки для транспортировки и сортировки.
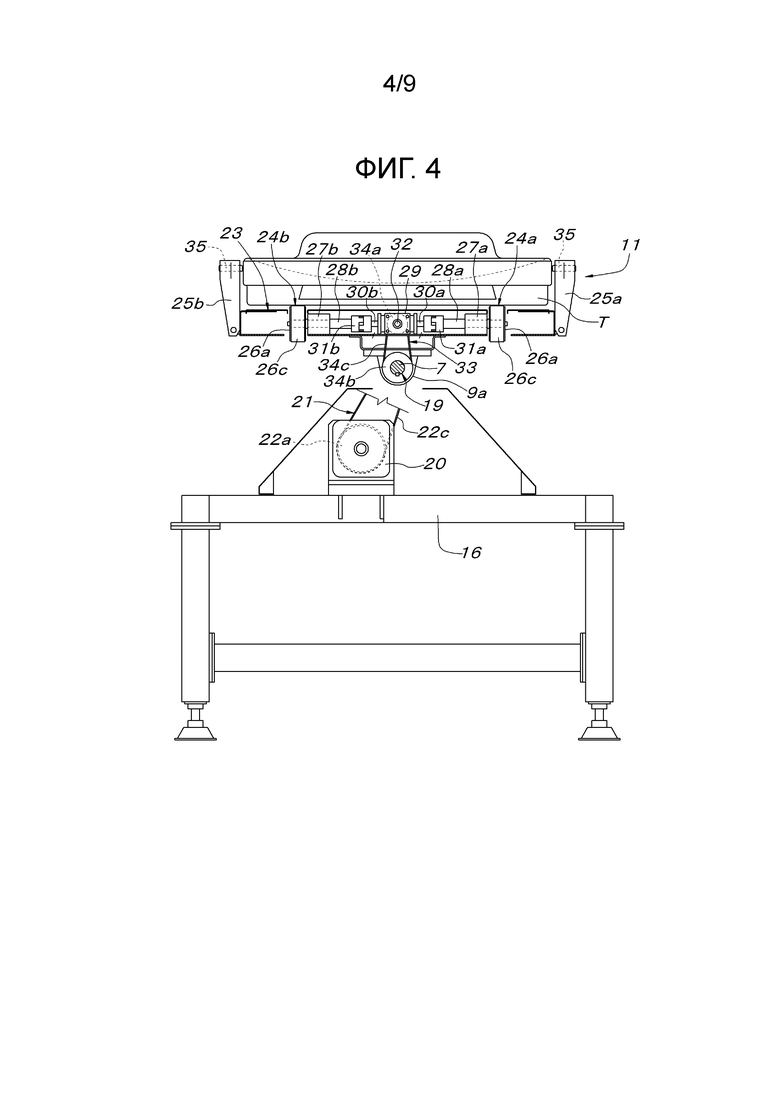
На фиг.4 представлен вид спереди с частичным вырезом, демонстрирующий сторону выхода установки для транспортировки и сортировки.
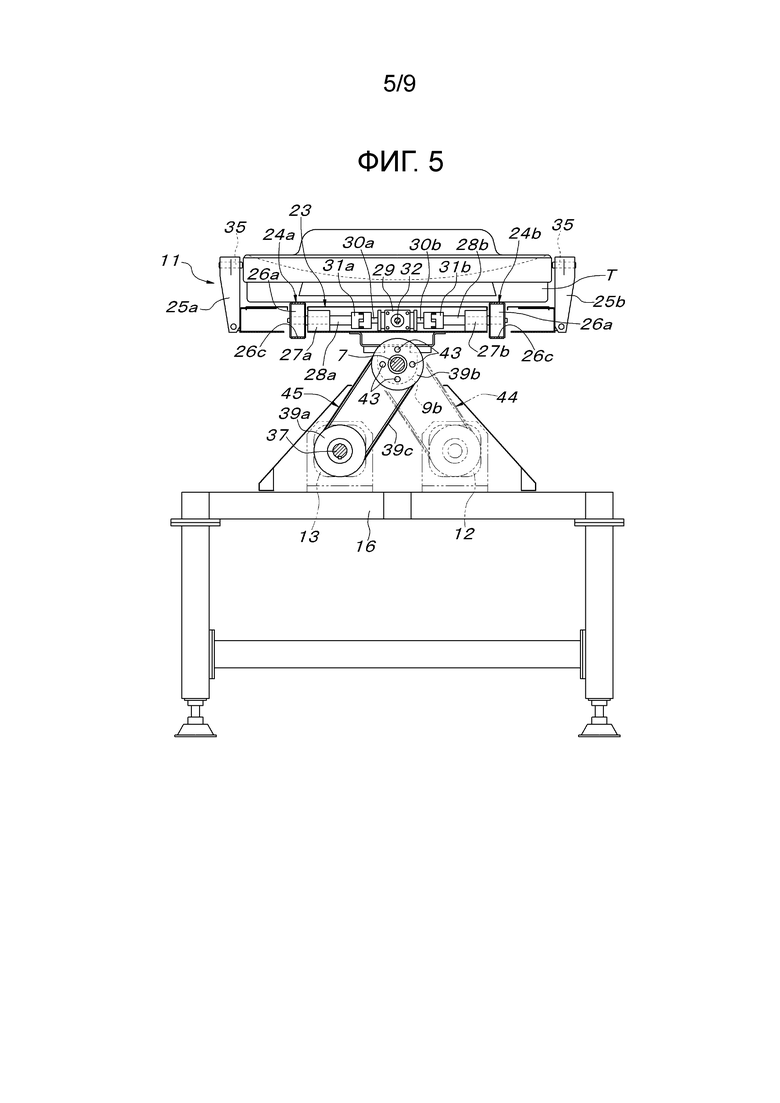
На фиг.5 представлен вид сзади в продольном сечении, демонстрирующий каждый узел, образующий установку для транспортировки и сортировки.
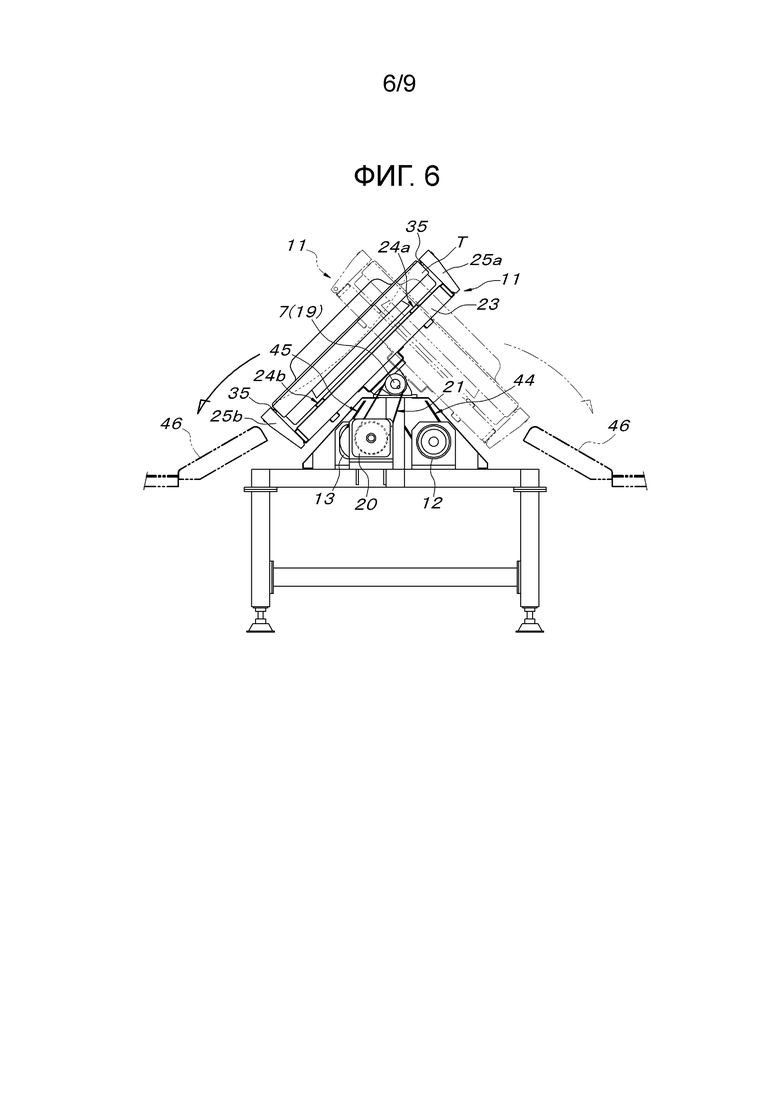
На фиг.6 представлен вид спереди, демонстрирующий операцию сортировки, проводимую модулем наклоняемого конвейера.
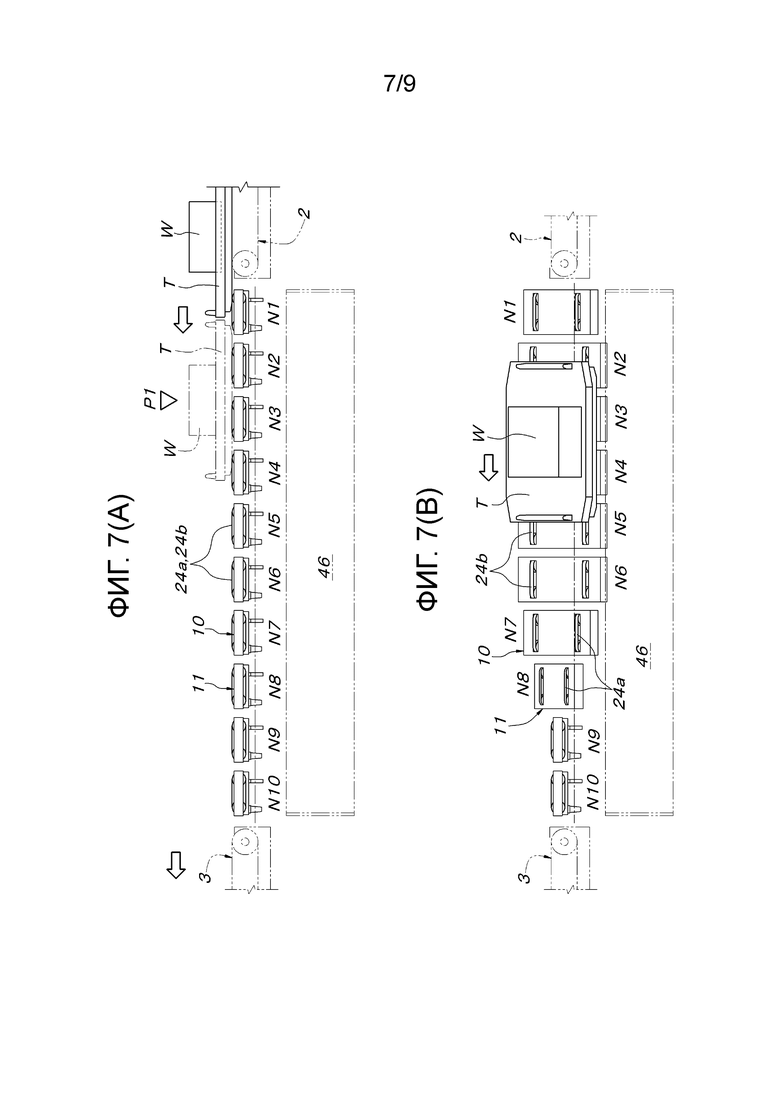
На фиг.7А представлен схематический вид сбоку, демонстрирующий первую стадию операции транспортировки и сортировки, проводимую установкой для транспортировки и сортировки, а на фиг.7В представлен схематический вид сбоку, демонстрирующий вторую стадию той операции.
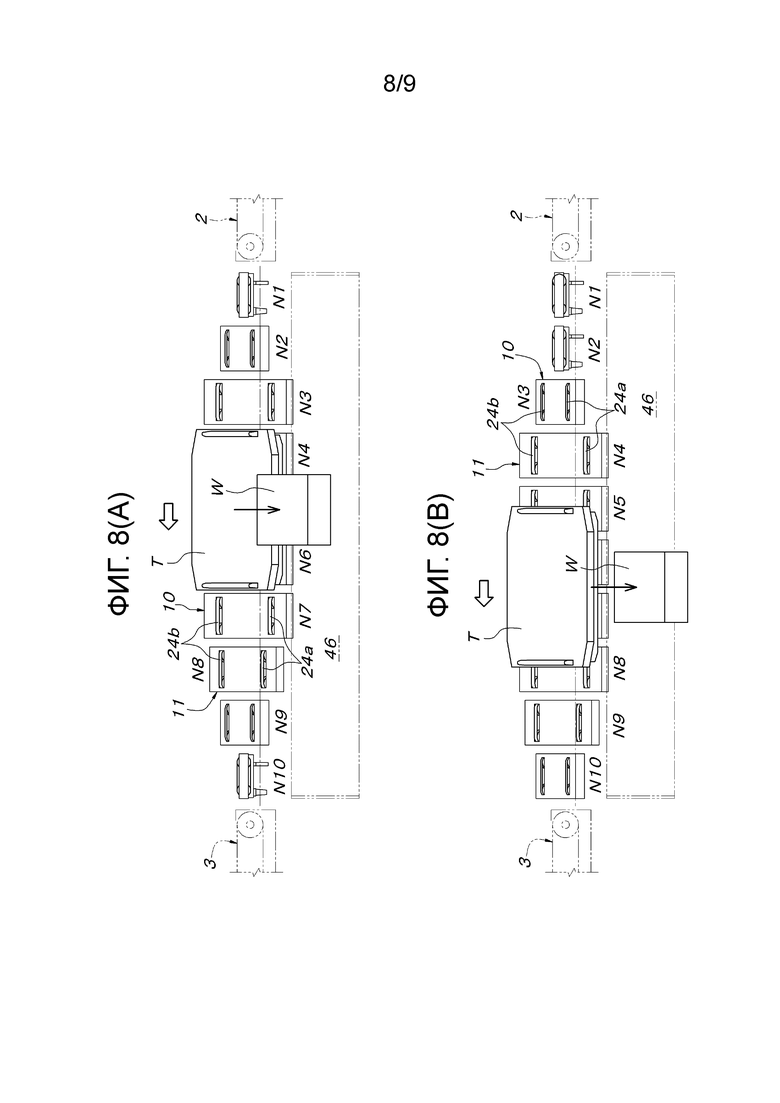
На фиг.8А представлен схематический вид сбоку, демонстрирующий третью стадию той операции а на фиг.8В представлен схематический вид сбоку, демонстрирующий четвертую стадию той операции.
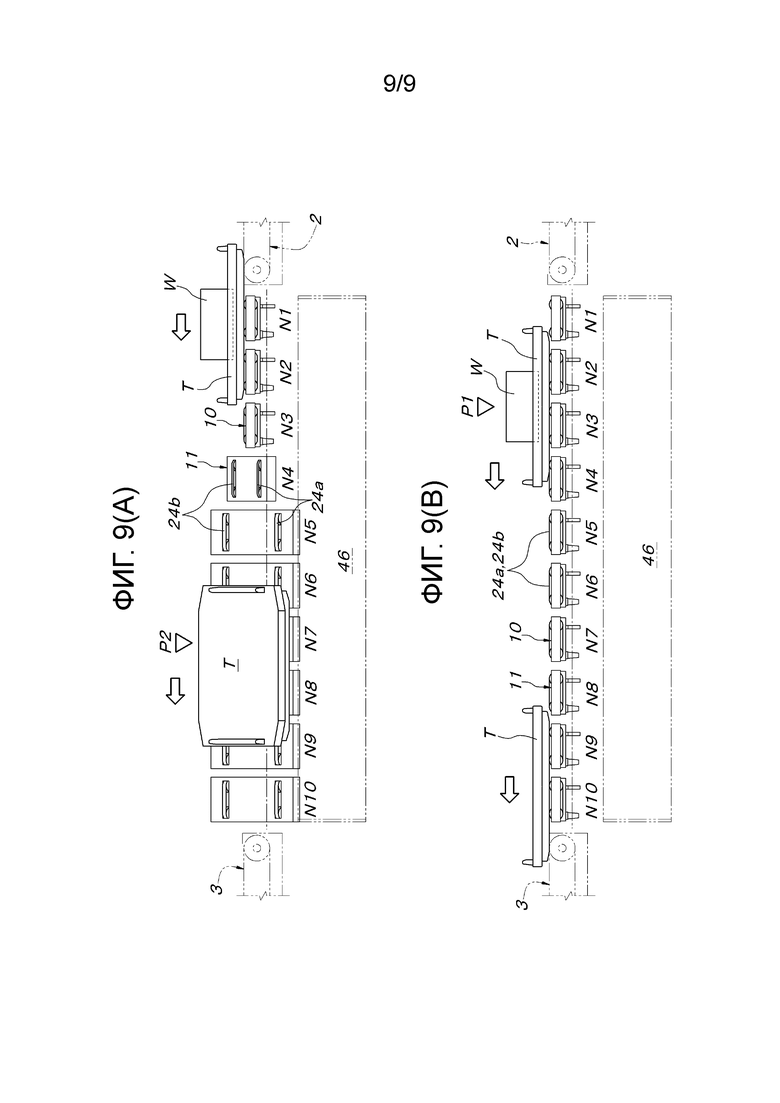
На фиг.9А представлен схематический вид сбоку, демонстрирующий пятую стадию той операции а на фиг.9В представлен схематический вид сбоку, демонстрирующий шестую стадию той операции.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0010] На фиг.1A и фиг.1B представлены схематический вид сбоку и вид в плане, на которых изображение центрального узла 1C пяти узлов 1A—1E, образующих установку для транспортировки и сортировки, опущено. C узлом 1A на концевом участке стороны входа соединен вносящий конвейер 2, а с узлом 1E на концевом участке стороны выхода соединен выносящий конвейер 3. В этом варианте осуществления в одном или множестве мест на пути транспортировки, предназначенном для транспортировки поддона Т, нагруженного транспортируемым объектом, задана зона сортировки. В этой зоне сортировки смонтирована установка для транспортировки и сортировки в соответствии с данным изобретением. Сортировка транспортируемого объекта в этой установке для транспортировки и сортировки осуществляется путем наклона транспортируемого поддона T в одном из направлений сортировки - влево и вправо - без остановки движения в направлении транспортировки, а также скольжения поперечно и вниз и падения транспортируемого объекта, нагруженного на поддон T сверху поддона T посредством силы тяжести. Естественно, транспортируемый объект можно также транспортировать непосредственно - не пользуясь лотком Т - и сортировать, как описано выше.
[0011] Далее, на основе фиг.2 - фиг.5, описывается подробная конструкция каждого узла 1A—1E. Каждый узел 1A—1E состоит из: опорного вала 7, оба конца которого оперты с возможностью вращения на пару подшипников 5, 6 в направлении транспортировки транспортируемого объекта, которое параллельно направлению транспортировки установкой для транспортировки и сортировки транспортируемого объекта, и который расположен горизонтально в центральном положении в направлении ширины - влево-вправо - установки для транспортировки и сортировки транспортируемого объекта; пары переднего и заднего модулей 10, 11 наклоняемых конвейеров, опертых на пару переднего и заднего подшипников 8a, 8b и 9a, 9b на этом опорном валу 7, соответственно; и двух электродвигателей 12, 13 наклона, индивидуально переключающих модули 10, 11 наклоняемых конвейеров между горизонтальной ориентацией для транспортировки и ориентацией под наклоном. Каждый из подшипников 5, 6, находящихся на обоих концах в направлении транспортировки посредством установки для транспортировки и сортировки в промежутке составляющих пару переднего и заднего подшипников 5, 6 каждого узла 1A—1E, оперт сверху на раму 16 посредством одного столбчатого опорного элемента 14, 15. Два соседних подшипника 5, 6 между двумя соседними узлами опираются на общий столбчатый опорный элемент 17 посредством основания 17a.
[0012] Концевые участки опорных валов 7 между двумя соседними узлами из числа узлов 1A—1E, концентрично сочленены, будучи взаимно блокированными, друг с другом посредством передающего вращение соединения 18, и поэтому образуется единственный взаимно блокируемый передаточный вал 19, продолжающийся по всей длине установки для транспортировки и сортировки, то есть, образуется зона, вся состоящая из узлов 1A—1E, каждый из которых включает в себя пару переднего и заднего модулей 10, 11 10, 11 наклоняемых конвейеров. Как показано на фиг.1A, фиг.1B и фиг.4, с помощью навиваемого средства 21 вертикальной передачи на свободном конце опорного вала 7 узла 1E, находящегося на концевом участке стороны выхода установки для транспортировки и сортировки, с ним сочленен, будучи взаимно блокированным, один электродвигатель 20 привода конвейеров, опертый на раму 16 снаружи узла 1E. В качестве навиваемого средства 21 передачи изображено средство ременной передачи, состоящее из шкива 22a на стороне передачи, шкивa 22b на ведомой стороне и бесконечного ремня 22c, натянутого между обоими шкивами 22a, 22b. Вместе с тем, навиваемое средство 21 передачи может быть навиваемым средством передачи, в котором используется цепь.
[0013] Каждый модуль 10, 11 наклоняемого конвейера имеет одну и ту же конструкцию и состоит из конструкции 23, на виде в плане представляющей собой прямоугольник, длина которого горизонтальна, пары левого и правого ленточных конвейеров 24a, 24b для транспортировки транспортируемого объекта, предусмотренных для конструкции 23, и боковых направляющих 25a, 25b, прикрепленных вдоль обоих - левого и правого - концов прямоугольной конструкции 23. Пара левого и правого ленточных конвейеров 24a, 24b образованы путем натяжения бесконечной ленты 26c между ведущим шкивом 26a и ведомым шкивом 26b и установлены так, что принадлежащий пути транспортировки верхний участок бесконечной ленты 26c раскрыт на верхней поверхности прямоугольной конструкции 23. Пара левого и правого ведущих шкивов 26a, расположенных соосно друг с другом, прикреплены к участкам внешних концов пары левого и правого вращающихся валов 28a, 28b, опертых в горизонтальной ориентации влево-вправо на подшипники 27a, 27b. Оба вращающихся вала 28a, 28b сочленены, будучи взаимно блокированными, посредством передающих вращение соединений 31a, 31b с выходными валами 30a, 30b, соосно выступающими, как в левую, так и в правую стороны из коробки 29 передач, установленной в центральном положении в направлении ширины - влево-вправо - в прямоугольной конструкции 23.
[0014] Коробка передач включает в себя приводной вал 32, который выступает назад в центральном положении в направление ширины - влево-вправо - в прямоугольной конструкции 23 и конфигурация которого такова, что оба выходных вала 30a, 30b взаимно блокированы и вращаются в одном и том же направлении с одной и той же скоростью за счет вращения приводного вала 32. Приводной вал 32 сочленен, будучи взаимно блокированным, со взаимно блокируемым передаточным валом 19 (опорным валом 7 каждого узла 1A—1E), расположенного непосредственно под приводным валом 32, с помощью навиваемого средства 33 передачи. В качестве навиваемого средства 33 передачи изображено средство ременной передачи, состоящее из шкива 34а на стороне передачи, шкива 34b на ведомой стороне и бесконечного ремня 34c, натянутого между обоими шкивами 34a, 34b. Вместе с тем, навиваемое средство 33 передачи может быть навиваемым средством передачи, в котором используется цепь.
[0015] При вышеупомянутой конфигурации, за счет эксплуатации одного электродвигателя 20 привода конвейеров, установленного на стороне выхода установки для транспортировки и сортировки, пары левого и правого ленточных конвейеров 24a, 24b, предусмотренные для пар переднего и заднего модулей 10, 11 наклоняемых конвейеров всех узлов 1A—1E, можно приводить во вращение с помощью навиваемого средства 33 передачи и коробок 29 передач от взаимно блокируемого передаточного вала 19 (опорного вала 7 каждого узла 1A—1E), так что поддон T, опертый на ленточных конвейерах 24a, 24b, транспортируется от стороны входа к стороне выхода установки для транспортировки и сортировки с предварительно определенной скоростью. В это время путь транспортировки поддона T регулируется на обеих - левой и правой - сторонах поддона T боковыми направляющими 25a, 25b, смонтированными на обеих - левой и правой - сторонах каждого модуля 10, 11 наклоняемого конвейера. Направляющие ролики 35, упирающиеся в поверхности обеих - левой и правой - сторон поддона T, шарнирно оперты на обоих - переднем и заднем - концевых участках боковых направляющих 25a, 25b в направлении транспортировки.
[0016] Пара переднего и задних модулей 10, 11 наклоняемых конвейеров, предусмотренных для узлов 1A—1E, оперты с помощью взаимно блокируемого передаточного вала 19 (опорного вала 7 каждого узла 1A—1E) посредством пары переднего и заднего подшипников 8a—9b, соответственно, с возможностью наклона в направлении, вдоль которого вертикально движутся оба - левый и правый - концевых участка. Чтобы переключать модуль 10, 11 наклоняемого конвейера между горизонтальной ориентацией для транспортировки (см. фиг.5), при которой поддон Т оперт и транспортируется, и ориентацией под наклоном, при которой наклон упомянутого конвейера вокруг опорного вала 7 составляет, например, около 45 градусов в одном из направлений влево и вправо, как показано на фиг.6, электродвигатель 12, 13 наклона для каждого модуля 10, 11 наклоняемого конвейера сочленен с этим модулем, будучи взаимно блокирован с ним. Для обоих электродвигателей 12, 13 наклона используется редуктор скорости, оснащенный большим исполнительным электродвигателем, имеющим габаритную длину в осевом направлении по центру больше, чем поперечная ширина в направлении транспортировки для одного модуля 10/11 наклоняемого конвейера, и имеющим большой крутящий момент привода. Таким образом, как показано на фиг.3, электродвигатели 12, 13 наклона установлены на раме 16 так, что вращения вперед и назад противоположны друг другу на обеих - левой и правой - сторонах опорного вала 7 на виде в плане, и так что соответственные осевые направления по центру становятся параллельными опорному валу 7.
[0017] Конкретнее, выходной вал 36, 37 каждого электродвигателя 12, 13 наклона прикреплен к шкиву 38a, 39a синхронизирующего ремня на стороне передачи. Участок свободного конца выходного вала 36, 37, выступающий от шкива 38a, 39a синхронизирующего ремня на стороне передачи, опирается на подшипник 41a, 41b, закрепленный на монтажной пластине 40a, 40b, служащей опорой каждому электродвигателю 12, 13 наклона. В связи с этим, выходному валу 36, 37 придана двухопорная конструкция. С другой стороны, изнутри от подшипников 5, 6, служащих опорами обоим концам опорного вала 7 каждого узла 1A—1E, с ними соседствуют подшипники 8a, 9b, находящиеся на внешней стороне среди пары переднего и заднего подшипников 8a—9b, чтобы они с возможностью наклона служили каждому модулю 10, 11 наклоняемого конвейера опорами посредством опорного вала 7. Кроме того, изнутри от подшипников 8a, 9b со шкивами 38a, 39a синхронизирующих ремней на стороне передачи спарены с возможностью вращения относительно них посаженные с большим зазором на опорный вал 7 шкивы 38b, 39b синхронизирующих ремней на ведомой стороне. Эти шкивы 38b, 39b синхронизирующих ремней на ведомой стороне и соседние подшипники 8a, 9b на внешней стороне связаны и объединены в одно целое множеством соединительных болтов 42, 43, расположенных по окружности. Синхронизирующие ремни 38c, 39c, служащие в качестве навиваемых средств для передачи, натянуты вокруг шкивов 38a, 39a синхронизирующих ремней на стороне передачи и шкивов 38b, 39b синхронизирующих ремней на ведомой стороне, и таким образом навиваемым средствам 44, 45 передачи придается конфигурация, предусматривающая использование синхронизирующих ремней. Иными словами, два электродвигателя 12, 13 наклона в ориентации, в которой осевое направление по центру параллельно опорному валу 7, установлены на раме 16 в некоторой точке, симметричной по отношению к центральной точке в направлении длины опорного вала 7 в положениях, где навиваемым средствам 44, 45 передачи можно придать вышеупомянутую конфигурацию.
[0018] Монтажная пластина 40a, 40b, служащая опорой каждому электродвигателю 12, 13 наклона и подшипнику 41a, 41b, установлена раме 16 с возможностью регулирования положения в поперечном направлении влево-вправо, а конфигурация ее такова, что становится возможным осуществление регулирования натяжения синхронизирующего ремня 38c, 39c навиваемых средств 44, 45 передачи. Шкив 34b на стороне передачи навиваемого средства 33 передачи, предназначенный для передачи вращения взаимно блокируемого передаточного вала 19 (опорного вала 7 каждого узла 1A—1E) ленточным конвейерам 24a, 24b модуля 10, 11 наклоняемого конвейера, крепится к опорному валу 7 в положении рядом с внутренней поверхностью шкивов 38b, 39b синхронизирующего ремня на ведомой стороне навиваемых средств 44, 45 передачи, как показано на фиг.3.
[0019] Теперь будет описан пример способа применения установки для транспортировки и сортировки, имеющей вышеупомянутую конфигурацию. Как описано выше, пары левого и правого ленточных конвейеров 24a, 24b пары переднего и заднего модулей 10, 11 наклоняемых конвейеров, предусмотренных для каждого узла 1A—1E, таковы, что, за счет эксплуатации одного электродвигателя 20 привода конвейеров, его вращающая сила соответственно передается на ведущие шкивы 26a ленточных конвейеров 24a, 24b через навиваемое средство 21 передачи и взаимно блокируемый передаточный вал 19, а также навиваемое средство 33 передачи, коробки 29 передач и вращающиеся валы 28a, 28b, соответствующие модулям 10, 11 наклоняемых конвейеров, и бесконечные ремни 26c входят в рабочее состояние вращения в предварительно определенном направлении с предварительно определенной скоростью.
[0020] С другой стороны, электродвигатели 12, 13 наклона останавливаются при нахождении модулей 10, 11 наклоняемых конвейеров всех узлов 1A—1E в горизонтальной ориентации для транспортировки, как показано на фиг.5, так что модули 10, 11 наклоняемых конвейеров сохраняют горизонтальную ориентацию для транспортировки за счет функционирования электродвигателей 12, 13 наклона, а не качаются вокруг опорного вала 7 и/или взаимно блокируемого передаточного вала 19 посредством силы тяжести. Соответственно, при поддержании модулей 10, 11 наклоняемых конвейеров всех узлов 1A—1E в горизонтальной ориентации для транспортировки, электродвигатель 20 привода конвейеров эксплуатируют так, как описано выше, для предусматривающего взаимную блокировку приведения ленточных конвейеров 24a, 24b во вращение в предварительно определенном направлении транспортировки, и тогда поддон T, нагруженный транспортируемым объектом, посылаемым с вносящего конвейера 2, показанного на фиг.1A и фиг.1B, можно транспортировать к выносящему конвейеру 3 с некоторой постоянной скоростью и отправлять на выносящий конвейер 3.
[0021] Когда некоторый конкретный модуль 10, 11 наклоняемого конвейера переключают от горизонтальной ориентации для транспортировки к ориентации под наклоном для сортировки в состоянии транспортировки поддона, в котором ленточные конвейеры 24a, 24b модулей 10, 11 наклоняемых конвейеров всех узлов 1A—1E эксплуатируют так, как описано выше, приводят в действие электродвигатель 12/13 наклона модуля 10/11 наклоняемого конвейера, подлежащего переключению на ориентацию под наклоном, и вращение его выходного вала 36/37 передается на конструкцию 23 целевого модуля 10/11 наклоняемого конвейера через шкив 38a/39a синхронизирующего ремня на стороне передачи, синхронизирующий ремень 38c/39c и шкив 38b/39b синхронизирующего ремня на ведомой стороне навиваемых средств 44/45 передачи, а также через подшипник 8a/9b, которые связаны и объединены в одно целое соединительными болтами 42/43. В связи с этим, целевой модуль 10/11 наклоняемого конвейера можно наклонять вокруг опорного вала 7 (взаимно блокируемого передаточного вала 19) в предварительно определенном направлении за счет некоторого угла поворота шкива 38b/39b синхронизирующего ремня на ведомой стороне. Когда модуль 10/11 наклоняемого конвейера, принявший ориентацию под наклоном, возвращают к исходной горизонтальной ориентации для транспортировки, электродвигатель 12/13 наклона модуля 10/11 наклоняемого конвейера обеспечивает поворот в обратном направлении на упомянутый угол поворота во время операции наклона, и модуль 10/11 наклоняемого конвейера может возвращаться от ориентации под наклоном к исходной горизонтальной ориентации для транспортировки.
[0022] Далее будет приведено конкретное описание операции сортировки. Когда транспортируемый объект, нагруженный на поддоне T, посылаемом со вносящего конвейера 2, является целевым, подлежащим сортировке в некотором определенном месте установки для транспортировки и сортировки, нужно лишь эксплуатировать установку для транспортировки и сортировки, конфигурация которой описана выше, в соответствии с процедурными этапами, перечисляемыми ниже на основе фиг.7A—фиг.9B. На пути транспортировки, обеспечиваемо установкой для транспортировки и сортировки в соответствии с данным вариантом осуществления, находятся в общей сложности десять модулей 10, 11 наклоняемых конвейеров, образующих пять узлов 1A—1E. В нижеследующем описании все модули 10, 11 наклоняемых конвейеров описываются посредством присвоения им номеров N1—N10, начиная со стороны входа.
(1) Как показано на фиг.7A, поддон T, нагруженный транспортируемым объектом W, являющимся целью сортировки, направляют со вносящего конвейера 2 на путь транспортировки, обеспечиваемый установкой для транспортировки и сортировки. Этот поддон T имеет некоторую длину в направлении транспортировки, опираясь на множество (три в иллюстрируемом примере) модулей 10, 11 наклоняемых конвейеров, а поперечная ширина - это ширина, по которой поддон T посажен между боковыми направляющими 25a, 25b на обеих - левой и правой - сторонах каждого модуля наклоняемого конвейера 10, 11 с надлежащим допуском. Поддон T имеет поверхность Ts приложения нагрузки, являющуюся дугообразной поверхностью по отношению к направлению ширины влево-вправо, которое перпендикулярно направлению транспортировки, как показано пунктирной линией на фиг.4 - фиг.6. Транспортируемый объект W стабильно удерживается на поверхности Ts приложения нагрузки во время транспортировки в обычной горизонтальной конфигурации для транспортировки.
(2) Когда вышеописанный поддон T достигает положения Р1 начала операции сортировки, заданного на пути транспортировки, обеспечиваемом установкой для транспортировки и сортировки, как показано на фиг.7B, все модули N1—N6 наклоняемых конвейеров N1—N6 в зоне, служащей опорой поддону T, и зоне, простирающейся в сторону направления транспортировки, одновременно переключаются - надлежащим образом согласно скорости транспортировки - от горизонтальной ориентации для транспортировки на ориентацию под наклоном для транспортировки (ориентации под наклоном на 45 градусов влево на рассматриваемом чертеже) посредством электродвигателей 12, 13 наклона. После этого, каждый из модулей N7—N10 наклоняемых конвейеров на стороне направления транспортировки, следующих за модулем N6 наклоняемого конвейера, тоже последовательно переключается на ориентацию под наклоном с задержкой этого момента времени на некоторый заданный промежуток времени. Поддон T, которому служат опорой модули 10, 11 наклоняемых конвейеров, переключенные на ориентацию под наклоном, принимается направляющими роликами 35 боковых направляющих 25a на нижней стороне угла наклона непрерывно транспортируется, сохраняя ориентацию наклоном при качении направляющих роликов 35.
(3) Посредством вышеописанных действий, как показано на фиг.8A и фиг.8B, поддон T переключается на ориентацию под наклоном как единое целое с модулями 10, 11 наклоняемых конвейеров, двигаясь в направлении транспортировки с момента времени прохождения положения Р1 начала операции сортировки, а после этого поддон T продолжает двигаться в направлении транспортировки, поддерживая ориентацию под наклоном. Таким образом, при транспортировке как единого целого с поддоном T, транспортируемый объект W на поддон T скользит по поверхности Ts приложения нагрузки поддона T к нижней стороне угла наклона под действием силы тяжести благодаря переходу поддона T на ориентацию под наклоном и сбрасывается сверху поддона T вбок с пути транспортировки. Таким образом, желоб 46, принимающий транспортируемый объект W, соскальзывающий поперечно с поддона T, можно расположить так, что он будет прилегать в стороне сбрасывания транспортируемого объекта W с левой и правой сторон установки для транспортировки и сортировки, как показано виртуальной линией на фиг.6 - фиг.9.
(4) Как описано выше, перед транспортировкой поддона T в ориентации под наклоном, каждый модуль наклоняемого конвейера 10, 11 на стороне направления транспортировки последовательно переключают на ориентацию под наклоном. Таким образом, как показано на фиг.9A, поддон T непрерывно транспортируется, поддерживая ориентацию под наклоном, а сброс транспортируемого объекта W надежно завершается в тот момент, когда поддон T проходит положение P2 завершения операции сортировки. Таким образом, все модули N6—N10 наклоняемых конвейеров в ориентации под наклоном, находящиеся в зоне опоры поддона T и на стороне направления транспортировки дальше, чем эта зона, одновременно возвращаются от ориентации под наклоном к исходной горизонтальной ориентации для транспортировки в момент времени, когда поддон T достигает положения Р2 завершения операции сортировки. Вследствие этого, как показано на фиг.9B, опорожненный поддон T может быть отправлен на выносящий конвейер 3, а поддон T при этом возвратится к горизонтальной ориентации для транспортировки.
(5) Как показано на фиг.7B — фиг.9A, каждый модуль N1—N5 наклоняемого конвейера, отправляемый относительно назад по отношению к поддону T, транспортируемому в состоянии переключения на ориентацию под наклоном, возвращается от ориентации под наклоном к исходной горизонтальной ориентации для транспортировки последовательно от стороны, которая ближе ко вносящему конвейеру 2. Вследствие этого, как показано на фиг.9A и фиг.9B, каждый модуль наклоняемого конвейера N1—N5 может принимать следующий поддон T, нагруженный транспортируемым объектом, со вносящего конвейера 2.
[0023] Вышеупомянутая установка для транспортировки и сортировки является лишь вариантом осуществления данного изобретения, а ее конструкцию и способ применения не следует считать ограничительными признаками. Например, когда длина пути транспортировки, обеспечиваемого установкой для транспортировки и сортировки, велика, и количество используемых модулей наклоняемых конвейеров увеличивается, модули наклоняемых конвейеров можно разделить на множество групп и предусмотреть электродвигатель 20 привода конвейеров для каждой группы.
[0024] Когда установка для транспортировки и сортировки образована множеством узлов 1A—1E, снабженных двумя модулями 10, 11 наклоняемых конвейеров, конфигурация электродвигателей 12, 13 наклона каждого узла 1A—1E и столбчатых опорные элементов 14, 15, 17, служащих опорами подшипникам 5, 6 на обоих концах опорного вала 7 каждого узла 1A—1E, обеспечивает установку непосредственно на общую раму 16 в вышеупомянутом варианте осуществления. Вместе с тем, возможна им такая конфигурация, в которой для каждого узла 1A—1E предусмотрена независимая рама 16, а узлы 1A—1E расположены последовательно, сочленяя рамы 16 друг другу и соединяя опорные валы 7 друг с другом посредством передающих вращение соединений и электродвигатель 20 привода конвейеров сочленен, будучи взаимно блокированным, с опорным валом 7 узла на одном конце среди узлов 1A—1E.
ПРОМЫШЛЕННАЯ ПРИМЕНИМОСТЬ
[0025] Установку для транспортировки и сортировки согласно данному изобретению можно использовать как такую установку для транспортировки и сортировки транспортируемых объектов, в которой транспортируемый объект нагружают на специально выделенный для транспортировки поддон и транспортируют на нем, а также удовлетворяют требование автоматической сортировки в соответствии с пунктом назначения как при транспортировке и сортировке багажа в аэропортах.
ПЕРЕЧЕНЬ ССЫЛОЧНЫХ ПОЗИЦИЙ
[0026] 1A—1E Узел
2 Вносящий конвейер
3 Выносящий конвейер
5, 6, 8a—9b, 27a, 27b, 41a, 41b Подшипник
7 Опорный вал
10, 11 Модуль наклоняемого конвейера
12, 13 Электродвигатель наклона
14, 15, 17 Столбчатый опорный элемент
16 Рама
18, 31a, 31b Передающее вращение соединение
19 Взаимно блокируемый передаточный вал
20 Электродвигатель привода конвейеров
21, 33, 44, 45 Навиваемые средства передачи
23 Прямоугольная конструкция
24a, 24b Ленточный конвейер
25a, 25b Боковая направляющая
29 Коробка передач
42, 43 Соединительный болт
46 Желоб
T Поддон для нагружения транспортируемого объекта
W транспортируемый объект
Установка для транспортировки и сортировки, которую можно применять как установку для транспортировки и сортировки багажа в аэропортах, содержит: электродвигатели 12 и 13 наклона, которые переключают модули 10, 11 наклоняемых конвейеров, опертые с возможностью качания влево и вправо вокруг опорного вала, параллельного направлению транспортировки между горизонтальной ориентацией для транспортировки, и ориентацией под наклоном; электродвигатель привода конвейеров, осуществляющий привод транспортирующих конвейеров 24a и 24b, которые предусмотрены для модулей 10 и 11 наклоняемых конвейеров. Опорный вал содержит единый взаимно блокируемый передаточный вал 19, имеющий длину, охватывающую всю зону множества модулей наклоняемых конвейеров 10, 11. Транспортирующие конвейеры 24a, 24b каждого модуля наклоняемых конвейеров сочленены, будучи взаимно блокированными, со взаимно блокируемым передаточным валом 19. Для упомянутой зоны установлен один электродвигатель привода конвейеров, а этот один электродвигатель привода конвейеров осуществляет привод транспортирующих конвейеров посредством взаимно блокируемого передаточного вала 19. Упрощается конструкция установки. 2 з.п. ф-лы, 13 ил.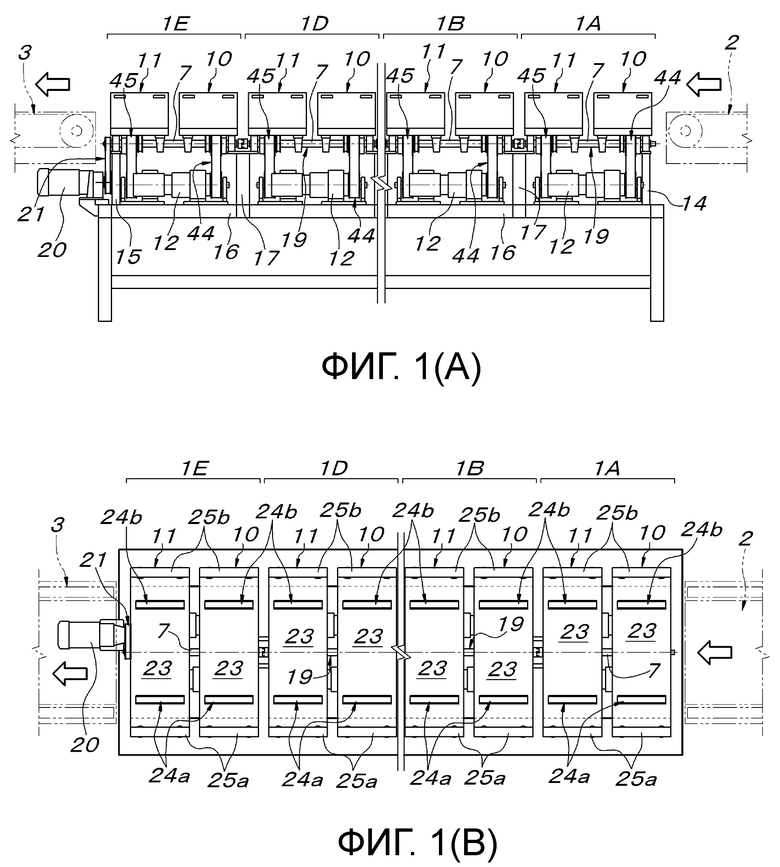
1. Установка для транспортировки и сортировки, включающая в себя множество модулей (10, 11) наклоняемых конвейеров, расположенных в ряд в направлении транспортировки, причем каждый из модулей (10, 11) наклоняемых конвейеров опирается с возможностью качания вокруг опорного вала (7), параллельного направлению транспортировки транспортируемого объекта, между горизонтальной ориентацией для транспортировки и ориентацией под наклоном для выпуска транспортируемого объекта - посредством силы тяжести - в направлении, поперечном по отношению к направлению транспортировки транспортируемого объекта, электродвигатель (20) привода конвейеров, выполненный с возможностью привода транспортирующих конвейеров для транспортируемого объекта, доставляемого к каждому из модулей (10, 11) наклоняемых конвейеров, и электродвигатель (12, 13) наклона, выполненный с возможностью переключения каждого из модулей (10, 11) наклоняемых конвейеров между горизонтальной ориентацией для транспортировки и ориентацией под наклоном, при этом
опорный вал (7) образован из единого взаимно блокируемого передаточного вала (19), имеющего длину, охватывающую всю зону, включающую в себя множество модулей (10, 11) наклоняемых конвейеров, а транспортирующие конвейеры (24а, 24b) всех модулей (10, 11) наклоняемых конвейеров в этой зоне сочленены, будучи взаимно блокированными, со взаимно блокируемым передаточным валом (19), и для упомянутой зоны установлен один электродвигатель (20) привода конвейеров, причем один электродвигатель (20) привода конвейеров осуществляет привод транспортирующих конвейеров (24а, 24b) всех модулей (10, 11) наклоняемых конвейеров в зоне посредством взаимно блокируемого передаточного вала (19).
2. Установка для транспортировки и сортировки по п.1, в которой
для каждого из модулей (10, 11) наклоняемых конвейеров предусмотрен единственный приводной вал (32), сочлененный, будучи взаимно блокированным, с транспортирующими конвейерами (24а, 24b) и располагаемый над взаимно блокируемым передаточным валом (19) в ориентации параллельно направлению транспортировки транспортируемого объекта, и единственный приводной вал (32) и взаимно блокируемый передаточный вал (19) сочленены, будучи взаимно блокированными, с помощью навиваемого средства (33) передачи, и подшипники (8а-9b) для придания модулю (10, 11) наклоняемого конвейера опоры с возможностью качания вокруг взаимно блокируемого передаточного вала (19) прикреплены к каждому из модулей (10, 11) наклоняемых конвейеров, и пассивный вращающийся элемент (39а, 39b), посаженный с возможностью относительного вращения на взаимно блокируемый передаточный вал (19) в положении рядом с подшипником (8а, 9b) прикреплен к подшипнику (8а, 9b), а вращающая сила выходного вала (36, 37) электродвигателя (12, 13) наклона, направление которой располагается в соответствии с каждым из модулей (10, 11) наклоняемых конвейеров, передается модулю (10, 11) наклоняемого конвейера с помощью навиваемого средства (38с, 39с) для передачи, натянутого между передаточным вращающимся элементом (38а, 39а), прикрепленным к выходному валу (36, 37), и пассивным вращающимся элементом (38b, 39b).
3. Установка для транспортировки и сортировки по п.2, в которой
множество модулей (10, 11) наклоняемых конвейеров разделено на множество узлов (1А-1Е), при этом два соседних модуля (10, 11) наклоняемых конвейеров составляют один узел, а опорой двум модулям (10, 11) наклоняемых конвейеров служит один опорный вал (7), оба концевых участка которого опираются посредством подшипников (5, 6) в каждом из узлов (1А-1Е), и опорные валы (7) сочленены, будучи взаимно блокированными, друг с другом посредством соединения (18) между двумя соседними узлами (1А-1Е), образуя взаимно блокируемый передаточный вал (19), и один электродвигатель (20) привода конвейеров расположен снаружи узла (1Е), находящегося на одном конце, а два электродвигателя (12, 13) наклона, осуществляющие привод двух модулей (10, 11) наклоняемых конвейеров в каждом из узлов (1А-1Е), установлены так, что передаточные вращающиеся элементы (38а, 39а) движутся встречно друг другу в направлении вперед-назад на обеих - левой и правой, на виде в плане - сторонах взаимно блокируемого передаточного вала (19).
| DE 10044612 A1, 21.03.2002 | |||
| US 20160137429 A1, 19.05.2016 | |||
| US 20180099818 A1, 12.04.2018. |

