ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к установке для транспортировки и сортировки, выполненной с возможностью сообщаемого в поперечном направлении скольжения и сортировки транспортируемого объекта посредством силы тяжести на позиции сортировки, заданной на пути транспортировки транспортируемого объекта.
УРОВЕНЬ ТЕХНИКИ
[0002] В качестве установки для транспортировки и сортировки, о которой шла речь выше, как описано в патентном документе 1, известна установка для транспортировки и сортировки транспортируемых объектов, включающая в себя множество модулей наклоняемых конвейеров, расположенных в ряд в направлении транспортировки, причем каждый из модулей наклоняемых конвейеров оперт с возможностью качания влево и вправо вокруг опорного вала, параллельного направлению транспортировки, между горизонтальной ориентацией для транспортировки и ориентацией под наклоном для выпуска транспортируемого объекта в направлении, поперечном по отношению к направлению транспортировки, посредством силы тяжести.
[0003] В такой установке для транспортировки и сортировки вместе с ней используют поддон некоторого фиксированного размера, на котором размещен транспортируемый объект, когда размер и форма транспортируемого объекта непостоянны. При сортировке, скольжение по лотку сообщают только транспортируемому объекту, размещенному на поддоне, и падающему в поперечном направлении, а поддон как он есть транспортируется к расположенной по ходу стороне. Операцию сортировки проводят, наклоняя модули наклоняемых конвейеров, служащие опорой лотку и транспортирующие его, а каждый модуль наклоняемого конвейера при этом продолжает перемещение поддона, чтобы не снизить кпд перемещения. Чтобы уменьшить крен при транспортировке поддона и увеличить кпд перемещения, когда установку для транспортировки и сортировки используют таким образом, длине в направлении перемещения каждого модуля наклоняемого конвейера придают конфигурацию, обеспечивающую достаточное укорочение по отношению к длине поддона, чтобы один поддон опирался на множество модулей наклоняемых конвейеров, а управление модулями наклоняемых конвейеров осуществляют следующим образом. Модуль наклоняемого конвейера, отбывающий к расположенной по ходу стороне из зоны опоры и транспортировки наклоненного заполненного поддона, в которой транспортируемый объект размещают на поддоне, незамедлительно восстанавливает исходную горизонтальную ориентацию, возвращаясь в положение приема (соответствующее горизонтальной ориентации) для последующего заполненного поддона. После сортировки, модули наклоняемых конвейеров на расположенной против хода стороне зоны опоры и транспортировки наклоненного пустого поддона, в которой опорожненный поддон опирается и транспортируется, сохраняя ориентацию под наклоном согласно операции сортировки, переключаются на ориентацию под наклоном последовательно, начиная с модуля наклоняемого конвейера, отбывающего к расположенной по ходу стороне от предыдущего пустого поддона, и соединяются с зоной опоры и транспортировки наклоненного заполненного поддона. В момент времени, когда длина пути транспортировки поддона, определяемая временем, требующимся, когда опорожненный поддон, восстановивший горизонтальную ориентацию в зоне опоры и транспортировки наклоненного пустого поддона, закрепляется на расположенной против хода стороне того поддона, все модули наклоняемых конвейеров в зоне опоры и транспортировки наклоненного пустого поддона восстанавливают горизонтальную ориентацию, причем - одновременно.
ПЕРЕЧЕНЬ ЦИТИРУЕМЫХ ДОКУМЕНТОВ
Патентные документы
[0004] Патентный документ 1: Перевод на японский язык международной заявки № 2015-501770 (Kohyo)
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Техническая задача
[0005] Когда управление модулями наклоняемых конвейеров осуществляют так, как описано выше, переключение модулей наклоняемых конвейеров с ориентации под наклоном на горизонтальную ориентацию и переключение модулей наклоняемых конвейеров с горизонтальной ориентации на ориентацию под наклоном надо проводить с учетом скорости транспортировки поддона в зоне сортировки в момент, когда заполненный поддон или пустой поддон не локализуется таким образом, что происходит несовпадение вертикальной оси заполненного поддона или пустого поддона между модулем наклоняемого конвейера, ориентация которого подлежит переключению, и модулем наклоняемого конвейера, который расположен рядом с упомянутым и ориентация которого не подлежит переключению. Поэтому текущее положение поддона в зоне сортировки, состоящей из множество модулей наклоняемых конвейеров, расположенных в ряд в направлении транспортировки, необходимо тщательно контролировать. В качестве средства для достижения этой цели, обычно предлагают конфигурацию, в которой положение поддона, транспортируемого в зоне сортировки, обнаруживают различны датчики. Однако на самом деле конфигурация, пригодная в качестве некоторого средства обнаружения положения поддона в процессе перемещения, и установка для транспортировки и сортировки, имеющая вышеописанную конфигурацию, в данной области техники еще не раскрыты.
Решение задачи
[0006] В данном изобретении предложена установка для транспортировки и сортировки, пригодная для решения задачи, описанной выше. Чтобы облегчить понимание связи с вариантом осуществления, приводимыми в скобках позициями, употребляемыми в описании варианта осуществления, о котором пойдет речь ниже, характеризуется установка для транспортировки и сортировки в соответствии с данным изобретением, являющаяся установкой для транспортировки и сортировки, включающей в себя множество модулей (10, 11) наклоняемых конвейеров, расположенных в ряд в направлении транспортировки, причем каждый из модулей (10, 11) наклоняемых конвейеров опирается сверху на раму (16) с возможностью качания влево и вправо вокруг опорного вала (7), параллельного направлению транспортировки транспортируемого объекта, между горизонтальной ориентацией для транспортировки и ориентацией под наклоном для выпуска транспортируемого объекта - посредством силы тяжести - в направлении, поперечном по отношению к направлению транспортировки транспортируемых объектов, в которой расположен отражающий фотоэлектрический датчик (32, 33), обнаруживающий транспортируемый объект (поддон Т), проходящий между модулями (10, 11) наклоняемых конвейеров, смежными друг к другу в направлении транспортировки, посредством луча света, проходящего вертикально через зазор между модулями (10, 11) наклоняемых конвейеров, и этот отражающий фотоэлектрический датчик (32, 33) прикреплен к опорному элементу (34, 35), опирающемуся на раму (16) и расположенному в некотором положении около опорного вала (7).
Преимущества изобретения
[0007] В соответствии с конфигурацией данного изобретения, описанной выше, положение транспортируемого объекта (например, поддона), транспортируемого в пределах зоны транспортировки, включающей в себя множество модулей наклоняемых конвейеров, можно обнаруживать по показаниям имеющегося - среди фотоэлектрических датчиков, соответствующих соответственным зазорам между модулями наклоняемых конвейеров, смежными друг к другу, - некоторого фотоэлектрического датчика, который находится в состоянии включения обнаружения транспортируемого объекта. То есть, если длине (ширине в направлении транспортировки) одного модуля наклоняемого конвейера придают конфигурацию, обеспечивающую такое укорочение по отношению к длине транспортируемого объекта, что один или несколько фотоэлектрических датчиков всегда находится или находятся в состоянии включения обнаружения транспортируемого объекта, передний конец транспортируемого объекта локализуется в пределах, определяемых по положению фотоэлектрического датчика - среди фотоэлектрических датчиков в состоянии включения обнаружения транспортируемого объекта, - находящегося на переднем (в направлении транспортировки) конце по ширине в направлении транспортировки модуля наклоняемого конвейера, соседнего на стороне фотоэлектрического датчика, находящейся спереди согласно его положению, а задний конец транспортируемого объекта локализуется в пределах, определяемых по положению фотоэлектрического датчика - среди фотоэлектрических датчиков в состоянии включения обнаружения транспортируемого объекта, - находящегося на заднем (в направлении транспортировки) конце по ширине в направлении транспортировки модуля наклоняемого конвейера, соседнего на стороне фотоэлектрического датчика, находящейся сзади согласно положению этого фотоэлектрического датчика. Таким образом, для переключения ориентации модуля наклоняемого конвейера на стороне, находящейся сзади по отношению к транспортируемому объекту, в момент времени, когда фотоэлектрический датчик - среди фотоэлектрических датчиков в состоянии включения обнаружения транспортируемого объекта, - находящийся на заднем конце в направлении транспортировки, переключается из включенного в выключенное состояние, модуля наклоняемого конвейера, соседнего сзади (в направлении транспортировки) согласно положению этого фотоэлектрического датчика, переключение ориентации оказывается возможным незамедлительно. Для переключения ориентации модуля наклоняемого конвейера на стороне фотоэлектрического датчика, находящейся спереди по отношению к транспортируемому объекту, ориентацией множества модулей наклоняемых конвейеров, задаваемой с учетом скорости транспортировки транспортируемого объекта на стороне фотоэлектрического датчика, находящейся спереди согласно его положению - среди фотоэлектрических датчиков в состоянии включения обнаружения транспортируемого объекта - на переднем конце в направлении транспортировки, можно управлять с тем чтобы поддерживать такую же ориентацию, как ориентация модулей наклоняемых конвейеров, служащих транспортируемому объекту опорой и транспортирующих его.
[0008] Как описано выше, положение транспортируемого объекта в пределах зоны сортировки обнаруживают по состояниям включения-выключения предусмотренных фотоэлектрических датчиков, соответствующих зазорам между модулями наклоняемых конвейеров, смежными друг к другу в направлении транспортировки, и оказывается возможным осуществление управления переключением ориентации каждого модуля наклоняемого конвейера. В конфигурации согласно данному изобретению фотоэлектрический датчик представляет собой отражающий фотоэлектрический датчик, который обнаруживает транспортируемый объект, проходящий между модулями наклоняемых конвейеров, смежными друг к другу в направлении транспортировки, посредством луча видимого или инфракрасного излучения, вертикально проходящего через зазор между модулями наклоняемых конвейеров, а также представляет собой фотоэлектрический датчик, расположенный в некотором положении около опорного вала, который является центральной осью наклона модуля наклоняемого конвейера. Таким образом, транспортируемый объект на модулях наклоняемых конвейеров можно обнаруживать по положению, ближайшему по отношению к упомянутому транспортируемому объекту, независимо от того, является ориентация модулей наклоняемых конвейеров горизонтальной ориентацией или ориентацией под наклоном. Более того, во время обнаружения транспортируемого объекта нет необходимости сравнивать результаты обнаружения поверхности транспортируемого объекта с результатами обнаружения объекта, не являющегося транспортируемым объектом, например, поверхности модуля наклоняемого конвейера, чтобы определить, обнаружен ли транспортируемый объект. Таким образом, обнаружение транспортируемого объекта в зоне сортировки можно осуществлять в высшей степени точно и надежно.
[0009] То есть, поскольку фотоэлектрический датчик представляет собой отражающий фотоэлектрический датчик, излучаемый луч света отражается нижней поверхностью транспортируемого объекта, и происходит прием отраженного луча света, а потом фотоэлектрический датчик входит в состояние включения обнаружения транспортируемого объекта. Поскольку нижняя поверхность транспортируемого объекта, проходящая между модулями наклоняемых конвейеров, имеющих горизонтальную ориентацию, оказывается в горизонтальном состоянии, а нижняя поверхность транспортируемого объекта, проходящая между модулями наклоняемых конвейеров, имеющих ориентацию под наклоном, наклонена, в любом из этих двух случаев необходима такая конфигурация, при которой луч света, излучаемый из фотоэлектрического датчика, находящегося в некотором фиксированном положении, отражаемый и возвращающийся от нижней поверхности транспортируемого объекта, принимается фотоэлектрическим датчиком, находящимся в упомянутом фиксированном положении. В таком случае, конфигурация согласно данному изобретению, при которой расстояние между фотоэлектрическим датчиком и нижней поверхностью транспортируемого объекта укорачивается, как описано выше, оказывается весьма выгодной и может быть просто и легко осуществлена с помощью фотоэлектрических датчиков, в общем случае доступных на рынке, без расположения двух фотоэлектрических датчиков, то есть, одного - для обнаружения транспортируемого объекта, проходящего между модулями наклоняемых конвейеров, имеющих горизонтальную ориентацию, и одного - для обнаружения транспортируемого объекта, проходящего между модулями наклоняемых конвейеров, имеющих ориентацию под наклоном, а также без использования какого-либо конкретного фотоэлектрического датчика, в котором зона приема отраженного луча света специально расширена.
[0010] При осуществлении данного изобретения, о котором шла речь выше, опорный элемент (34) может состоять из ограждающего листового материала (34a), охватывающий с двух сторон опорный вал (7), и этот ограждающий листовой материал (34a) может иметь обе ножки, закрепленные на опорном основании (36), установленном на раме (16) таким образом, что находится ниже опорного вала (7). В соответствии с этой конфигурацией, фотоэлектрический датчик можно крепить в любом месте около опорного вала, а еще можно также придать достаточную прочность опорному элементу, состоящему из ограждающего листового материала. Когда опорный вал (7) имеет соединительный участок, присоединенный посредством соединения (18) валов в некотором положении между модулями (10, 11) наклоняемых конвейеров, смежными друг к другу в направлении транспортировки, этот соединительный участок можно снабдить парой подшипников (5, 6), служащих опорами концевым участкам каждого опорного вала (7) на обеих сторонах соединения (18) валов, и опорным основанием (17а) подшипников, установленным над рамой (16) и служащим опорой паре подшипников (5, 6). Таким образом, фотоэлектрический датчик (32, 33), расположенный между модулями (10, 11) наклоняемых конвейеров в том положении, где находится соединительный участок, можно крепить к опорному элементу (35), состоящему из ограждающего листового материала (35a), охватывающего с двух сторон соединение (18) валов, а ограждающий листовой материал (35a) может иметь обе ножки, закрепленные на опорном основании (17a) подшипников.
[0011] Когда фотоэлектрический датчик (32, 33) располагают выше, чем опорный вал (7), если смотреть сбоку, расстояние между фотоэлектрическим датчиком и нижней поверхностью транспортируемого объекта, подлежащего обнаружению, можно дополнительно укоротить. Фотоэлектрический датчик (32, 33) можно крепить таким образом, что направление излучения его луча света наклонится - по отношению к вертикальному направлению - на стороне направления наклона к ориентации под наклоном модуля (10, 11) наклоняемого конвейера. В этом случае, угол наклона направления излучения задают равным углу, дающему возможность обнаружения, как транспортируемого объекта, перемещаемого между модулями (10, 11) наклоняемых конвейеров, когда модули (10, 11) наклоняемых конвейеров имеют горизонтальную ориентацию, так и транспортируемого объекта, перемещаемого между модулями (10, 11) наклоняемых конвейеров, когда модули (10, 11) наклоняемых конвейеров имеют ориентацию под наклоном. В частности, например, когда модуль наклоняемого конвейера наклоняют, например, на 45 градусов в направлении влево (или вправо) по отношению к вертикальной линии, проходящей через осевой центр опорного вала, если направлению излучения луча света фотоэлектрического датчика придают конфигурацию, обеспечивающую наклон в том же направлении на 22,5 градусов, что составляет половину угла наклона модуля наклоняемого конвейера, оказывается возможным прием отраженного луча света фотоэлектрическим датчиком, находящимся в упомянутом фиксированном положении, например, на стороне правого конца зоны отражения луча света от горизонтальной нижней поверхности транспортируемого объекта, когда модуль наклоняемого конвейера имеет горизонтальную ориентацию, и оказывается возможным прием отраженного луча света фотоэлектрическим датчиком, находящимся в упомянутом фиксированном положении, например, на стороне левого конца зоны отражения луча света от горизонтальной нижней поверхности транспортируемого объекта, когда модуль наклоняемого конвейера имеет ориентацию под наклоном. То есть, используя всю зону отражения луча света от нижней поверхности транспортируемого объекта, надежно обнаруживать транспортируемый объект, проходящий между модулями наклоняемых конвейеров, можно посредством фотоэлектрического датчика, находящегося в упомянутом фиксированном положении, когда модуль наклоняемого конвейера имеет любую из ориентаций - горизонтальную или под наклоном.
[0012] Когда модулю наклоняемого конвейера придана конфигурация, обеспечивающая его наклон, как в левую, так и в правую стороны, чтобы можно было сортировать транспортируемый объект, как в левую, так и в правую стороны зоны сортировки, фотоэлектрический датчик, соответствующий ориентации под наклоном в левую сторону, и фотоэлектрический датчик, соответствующий ориентации под наклоном в правую сторону, можно расположить так, что они будут прилегать к опорному валу, оказываясь распределенными слева и справа.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
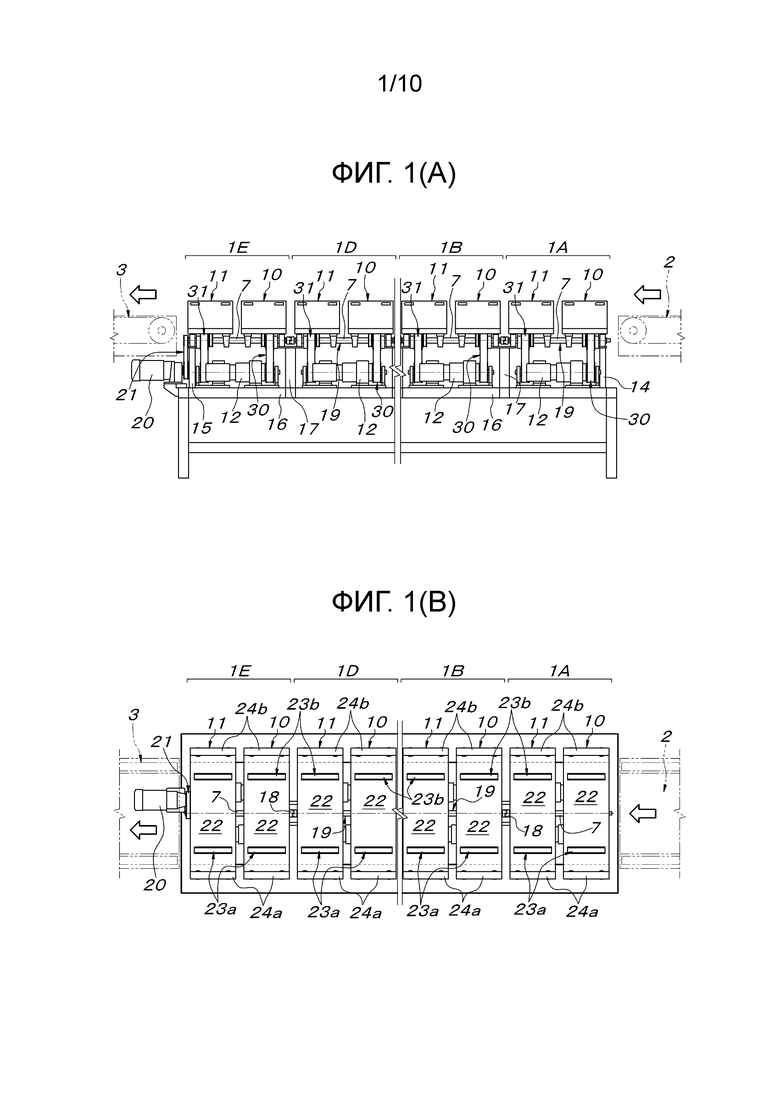
[0013] На фиг.1 представлен изображенный с частичными изъятиями вид сбоку установки для транспортировки и сортировки, а на фиг.1B представлен ее вид в плане.
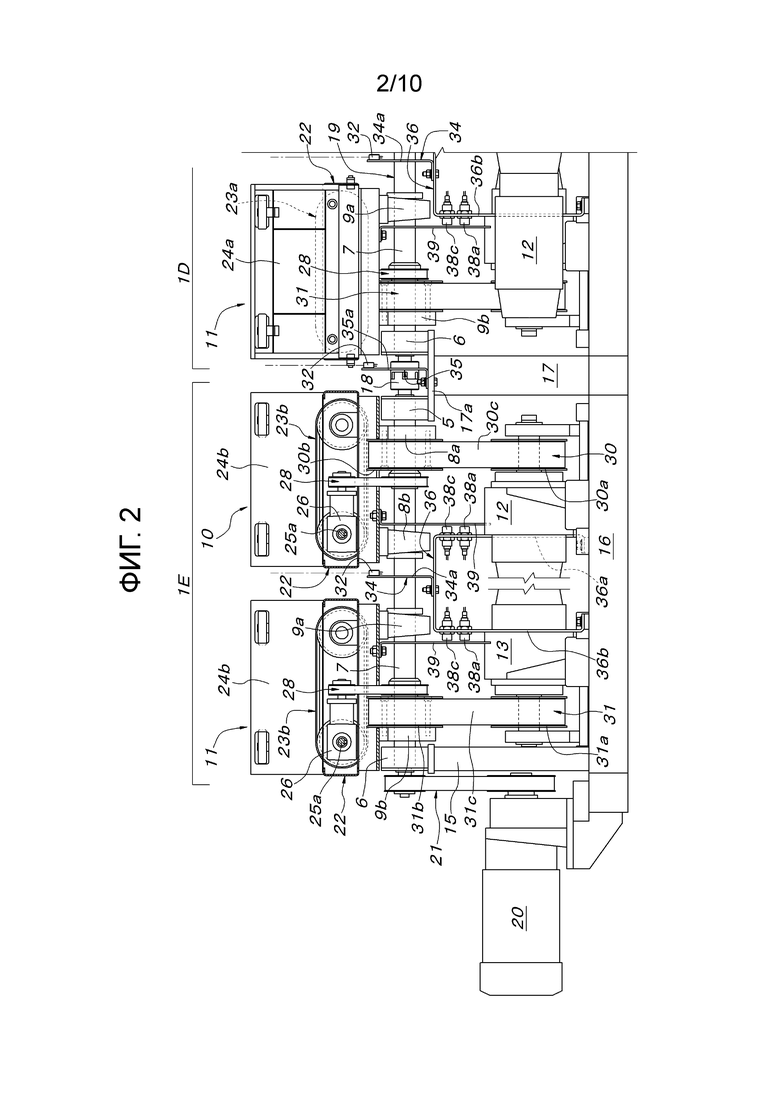
На фиг.2 представлен вид сбоку основной части, демонстрирующий зону стороны выхода установки для транспортировки и сортировки.
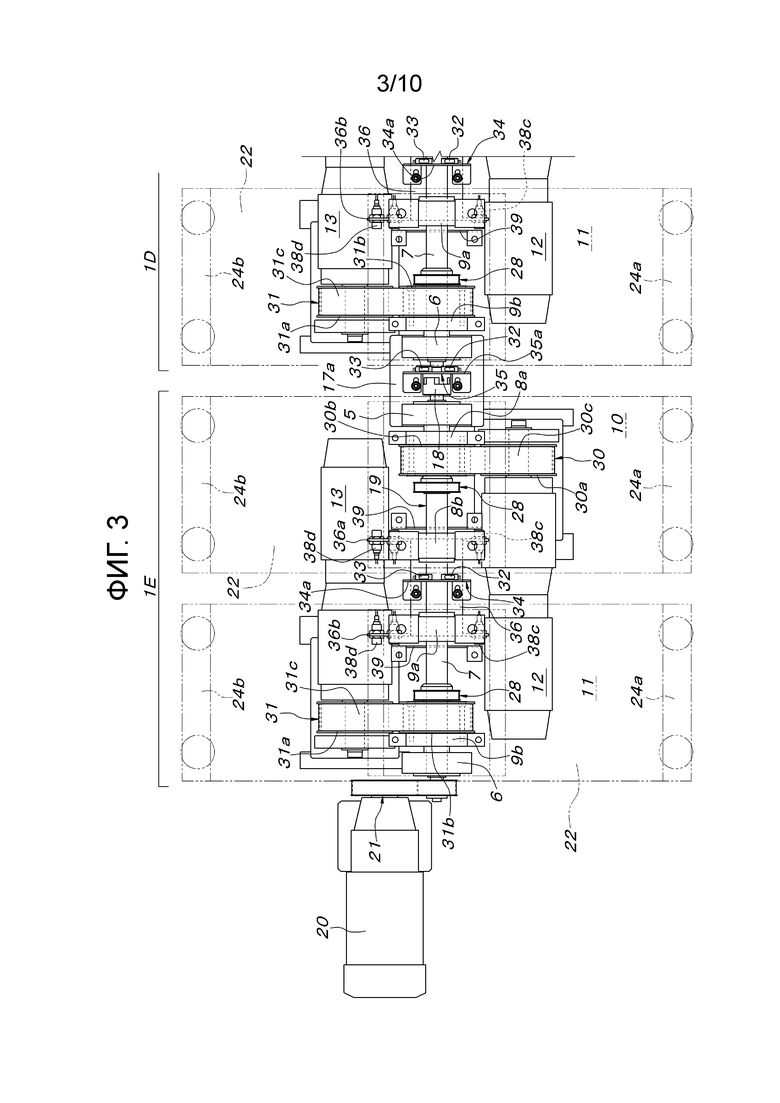
На фиг.3 представлен вид в плане основной части, демонстрирующий состояние, где каждый модуль наклоняемого конвейера согласно фиг.2 удален.
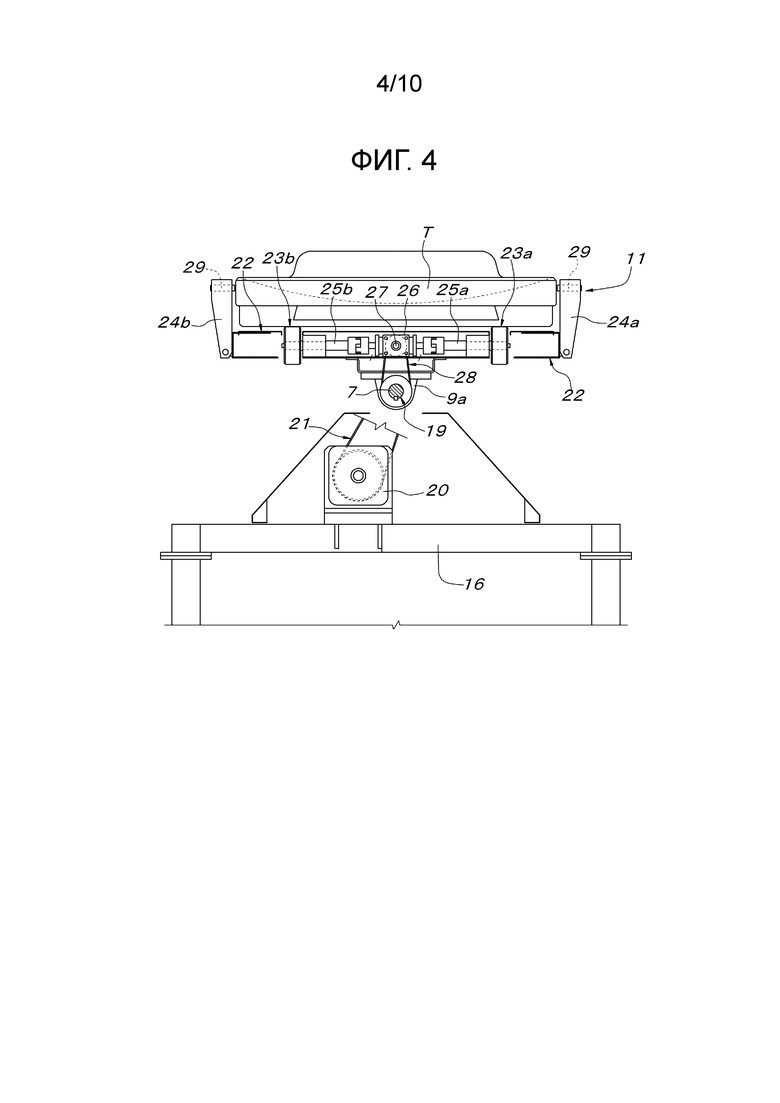
На фиг.4 представлен вид спереди в продольном сечении главной части (вид, рассматриваемый с той ее стороны, которая в направлении транспортировки расположена по ходу), демонстрирующий систему привода пары левого и правого ленточных конвейеров, предусмотренного для модуля наклоняемого конвейера.
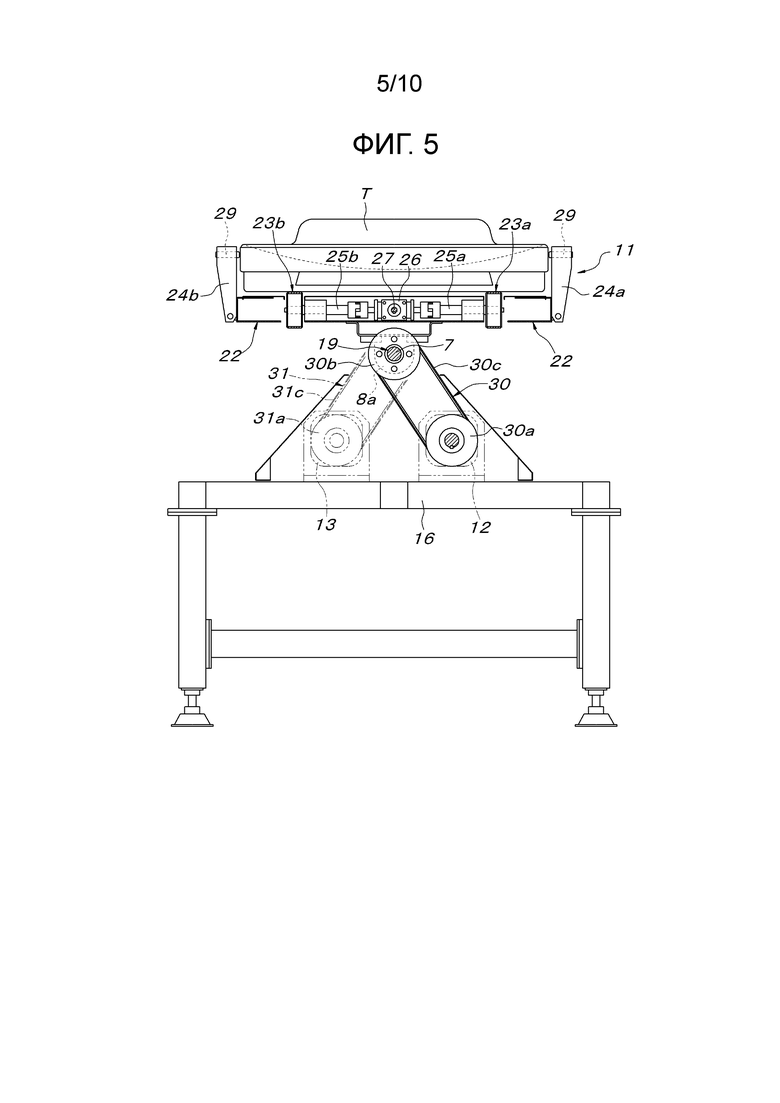
На фиг.5 представлен вид спереди в продольном сечении основной части, демонстрирующий систему привода для наклона модуля наклоняемого конвейера.
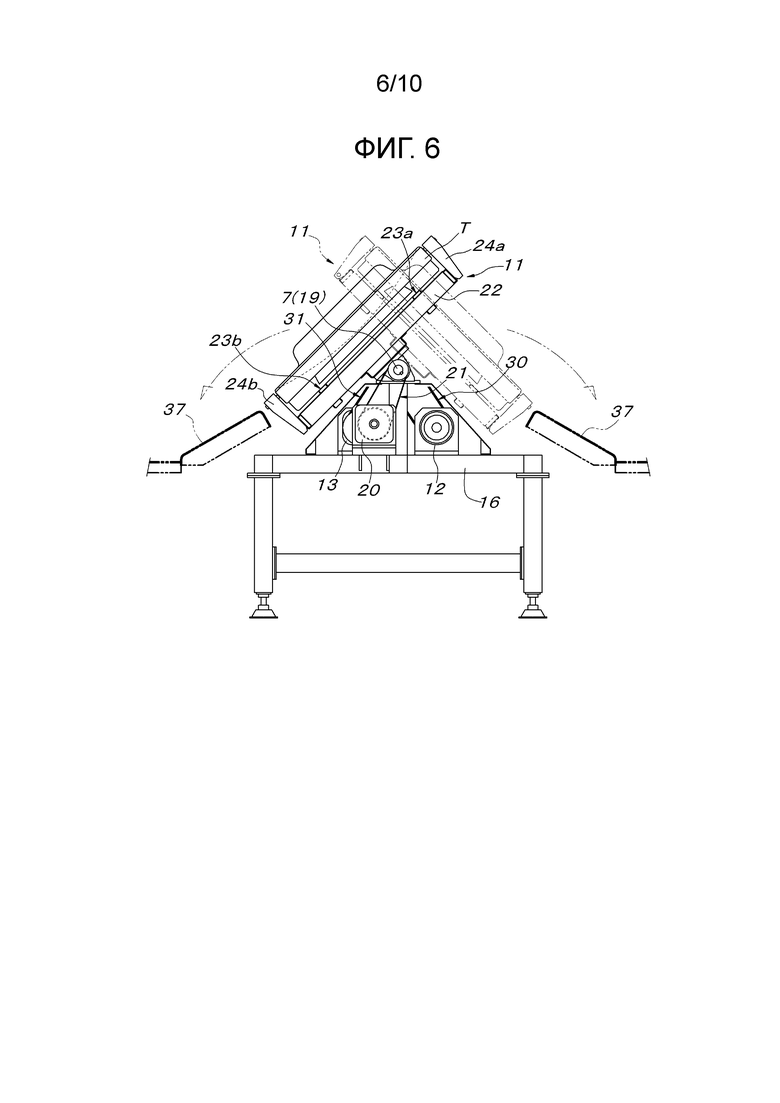
На фиг.6 представлен вид спереди, иллюстрирующий состояние во время операции сортировки, проводимой установкой транспортировки и сортировки.
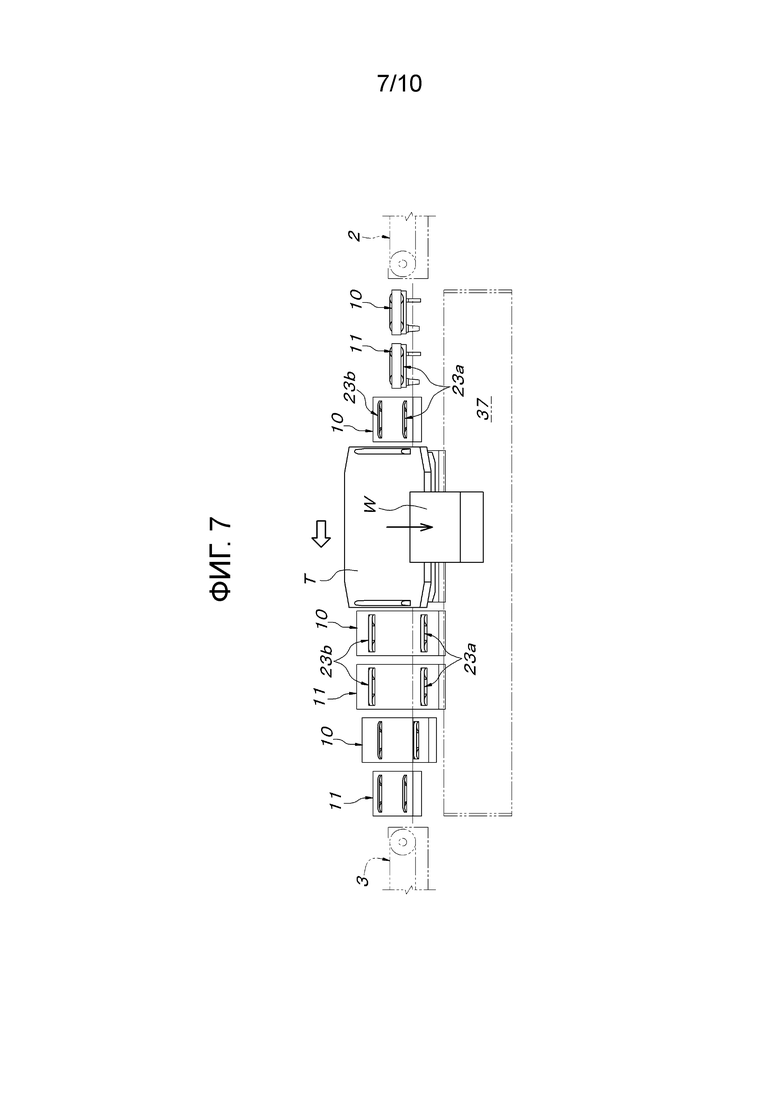
На фиг.7 представлен схематический вид сбоку, иллюстрирующий состояние во время операции сортировки в левую сторону, проводимой установкой транспортировки и сортировки.
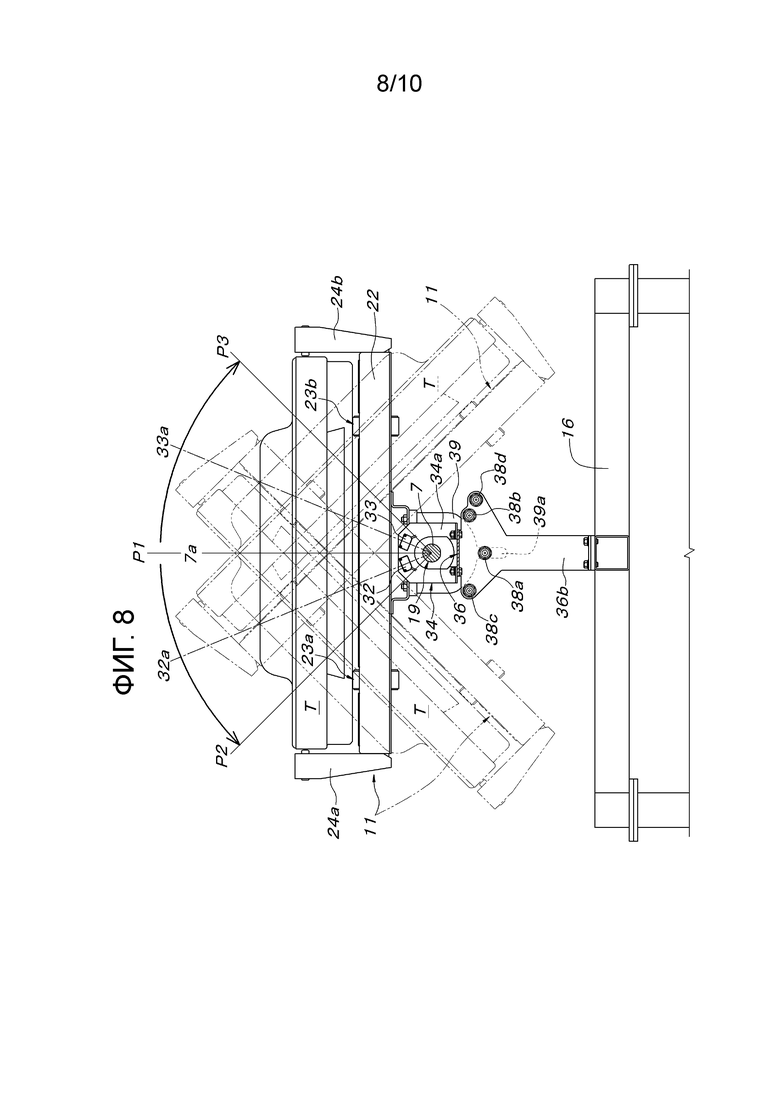
На фиг.8 представлен вид сзади основной части (вид, рассматриваемый с той ее стороны, которая в направлении транспортировки расположена против хода) в продольном сечении, иллюстрирующий средство обнаружения текущего положения поддона для загрузки транспортируемого объекта.
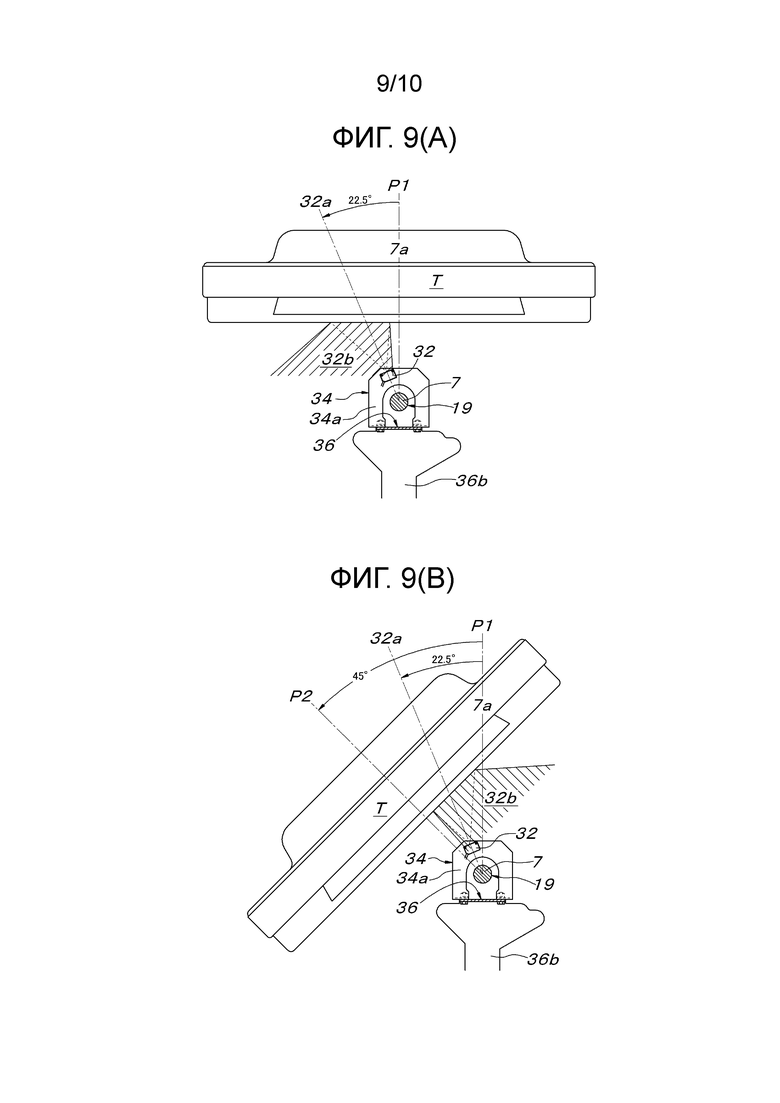
На фиг.9А представлен вид сзади основной части, иллюстрирующий состояние операции обнаружения, проводимой фотоэлектрическим датчиком в то время, когда модуль наклоняемого конвейера имеет горизонтальную ориентацию, а на фиг.9В представлен вид сзади основной части, иллюстрирующий состояние операции обнаружения, проводимой фотоэлектрическим датчиком в то время, когда модуль наклоняемого конвейера имеет ориентацию под наклоном.
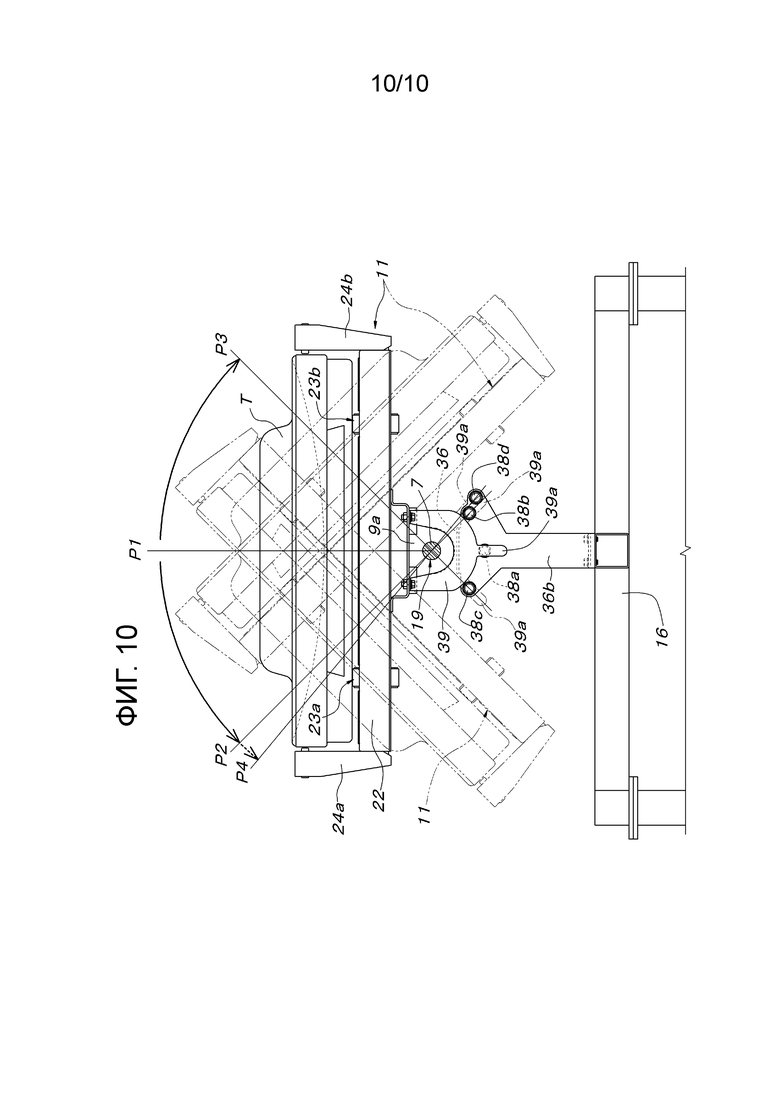
На фиг.10 представлен вид сзади основной части, иллюстрирующий средство обнаружения ориентации модуля наклоняемого конвейера.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0014] Как показано на фиг.1A и фиг.1B, установка для транспортировки и сортировки, иллюстрируемая в этом варианте осуществления, расположена в одной зоне сортировки, заданной на пути транспортировки, для транспортировки поддона, нагруженного транспортируемым объектом, и состоит из пяти узлов 1A-1E. С узлом 1А на концевом участке стороны входа соединен вносящий конвейер 2, а с узлом 1E на концевом участке стороны выхода соединен выносящий конвейер 3. На чертежах изображение центрального узла 1C опущено.
[0015] Каждый узел 1A-1E имеет одну и ту же конструкцию. Описываемый на основе фиг.2-фиг.6, каждый узел 1A to 1E состоит из: опорного вала 7, оба конца которого оперты с возможностью вращения на пару подшипников 5, 6 в направлении транспортировки транспортируемого объекта, которое параллельно направлению транспортировки установкой для транспортировки и сортировки, и который расположен горизонтально в центральном положении в направлении ширины - влево-вправо - установки для транспортировки и сортировки; пары переднего и заднего модулей 10, 11 наклоняемых конвейеров, опертых на пару переднего и заднего подшипников 8a, 8b и 9a, 9b на этом опорном валу 7, соответственно; и двух электродвигателей 12, 13 наклона, индивидуально переключающих модули 10, 11 наклоняемых конвейеров между горизонтальной ориентацией для транспортировки и ориентацией под наклоном. Каждый из подшипников 5, 6, находящихся на обоих концах в направлении транспортировки посредством установки для транспортировки и сортировки в промежутке составляющих пару переднего и заднего подшипников 5, 6 каждого узла 1A-1E, опирается сверху на раму 16 посредством одного столбчатого опорного элемента 14, 15. Два соседних подшипника 5, 6 между двумя соседними узлами опираются на общий столбчатый опорный элемент 17 посредством одного опорного основания 17а подшипников и над рамой 16.
[0016] Концевые участки опорных валов 7 между двумя соседними узлами из числа узлов 1A-1E концентрично сочленены, будучи взаимно блокированными, друг с другом посредством соединения 18 валов, и поэтому образуется цельный взаимно блокируемый передаточный вал 19, продолжающийся по всей длине установки для транспортировки и сортировки. C помощью навиваемого средства 21 вертикальной передачи на свободном конце опорного вала 7 узла 1E, находящегося на концевом участке стороны выхода установки для транспортировки и сортировки, с ним сочленен, будучи взаимно блокированным, один электродвигатель 20 привода конвейеров, опертый на раму 16 снаружи узла 1E.
[0017] Каждый модуль 10, 11 наклоняемого конвейера имеет одну и ту же конструкцию и состоит из конструкции 23, на виде в плане представляющей собой прямоугольник, длина которого горизонтальна, пары левого и правого ленточных конвейеров 23a, 23b для транспортировки транспортируемого объекта, предусмотренных для конструкции 22, и боковых направляющих 24a, 24b, прикрепленных вдоль обоих - левого и правого - концов конструкции 22. Каждый ленточный конвейер 23a, 23b включает в себя приводные валы 25a, 25b на стороне своего переднего конца, последовательно расположенные концентрично друг с другом в поперечном направлении влево-вправо. Оба приводных вала 25a, 25b сочленены, будучи взаимно блокированными, с общим приводным валом 27, простирающимся назад от одной коробки 26 передач, установленной на конструкции 22. Общий приводной вал 27. Общий приводной вал 27 сочленен, будучи взаимно блокированным, с опорным валом 7 с помощью навиваемого средства 28 передачи.
[0018] При вышеупомянутой конфигурации, за счет эксплуатации одного электродвигателя 20 привода конвейеров, установленного на стороне выхода установки для транспортировки и сортировки, пары левого и правого ленточных конвейеров 23a, 23b, предусмотренные для пар переднего и заднего модулей 10, 11 наклоняемых конвейеров всех узлов 1A-1E, можно приводить во вращение с помощью навиваемого средства 28 передачи и коробок 26 передач от взаимно блокируемого передаточного вала 19 (опорного вала 7 каждого узла 1A-1E), так что поддон T, опертый на ленточных конвейерах 23a, 23b, транспортируется от стороны входа к стороне выхода установки для транспортировки и сортировки с предварительно определенной скоростью. В это время путь транспортировки поддона T регулируется на обеих - левой и правой - сторонах поддона T боковыми направляющими 24a, 24b, смонтированными на обеих - левой и правой - сторонах каждого модуля 10, 11 наклоняемого конвейера. Пара переднего и заднего направляющих роликов 29, упирающихся в поверхности обеих - левой и правой - сторон поддона T, шарнирно оперты на боковых направляющих 24a, 24b.
[0019] Пара переднего и заднего модулей 10, 11 наклоняемых конвейеров, предусмотренных для узлов 1A-1E, оперты с помощью взаимно блокируемого передаточного вала 19 (опорного вала 7 каждого узла 1A-1E) посредством пары переднего и заднего подшипников 8a-9b, соответственно, с возможностью наклона в направлении, вдоль которого вертикально движутся оба - левый и правый - концевых участка. Чтобы переключать модуль 10, 11 наклоняемого конвейера между горизонтальной ориентацией для транспортировки (см. фиг.4 и фиг.5), при которой поддон Т оперт и транспортируется, и ориентацией под наклоном, при которой наклон упомянутого конвейера вокруг опорного вала 7 составляет, например, около 45 градусов в одном из направлений влево и вправо, как показано на фиг.6, электродвигатель 12, 13 наклона для каждого модуля 10, 11 наклоняемого конвейера сочленен с этим модулем, будучи взаимно блокирован с ним. Как показано на фиг.3, оба электродвигателя 12, 13 наклона установлены на раме 16 таким образом, что на виде в плане направления вперед и назад противоположны друг другу на обеих - левой и правой - сторонах опорного вала 7 и что соответственные направления к осевому центру становятся параллельными опорному валу 7.
[0020] Конкретнее, между каждым электродвигателем 12, 13 наклона и модулем 10, 11 наклоняемого конвейера вставлено навиваемое средство 30, 31 передачи, в котором используется синхронизирующий ремень. Навиваемое средство 30, 31 передачи образовано путем натяжения синхронизирующего ремня 30c, 31c между шкивом 30a, 31a синхронизирующего ремня на стороне передачи, прикрепленного к выходному валу каждого электродвигателя 12, 13 наклона, а на опорный вал 7 с большим зазором посажен с возможностью относительного вращения шкив 30b, 31ba синхронизирующего ремня на ведомой стороне. Шкив 30b, 31ba синхронизирующего ремня на ведомой стороне прикреплен к находящемуся снаружи подшипнику 8a, 9b и выполнен как одно целое с ним среди пар передних и задних подшипников 8a-9b, которые позволяют модулям 10, 11 наклоняемых конвейеров опираться с возможностью наклона на опорный вал 7. Вращение шкива 30b, 31b синхронизирующего ремня на ведомой стороне передается непосредственно на модуль 10, 11 наклоняемого конвейера (конструкцию 22), а модулю 10, 11 наклоняемого конвейера придана конфигурация, обеспечивающую наклон вокруг опорного вала 7.
[0021] Теперь будет описан пример способа применения установки для транспортировки и сортировки, имеющей вышеупомянутую конфигурацию. Как описано выше, пары левого и правого ленточных конвейеров 23a, 23b пары переднего и заднего модулей 10, 11 наклоняемых конвейеров, предусмотренных для каждого узла 1A-1E, таковы, что, за счет эксплуатации одного электродвигателя 20 привода конвейеров входят в рабочее состояние вращения в одном и том же направлении с предварительно определенной скоростью.
[0022] С другой стороны, электродвигатели 12, 13 наклона останавливаются при нахождении модулей 10, 11 наклоняемых конвейеров всех узлов 1A-1E в горизонтальной ориентации для транспортировки, как показано на фиг.5, так что модули 10, 11 наклоняемых конвейеров сохраняют горизонтальную ориентацию для транспортировки за счет функционирования электродвигателей 12, 13 наклона, а не качаются вокруг опорного вала 7 и/или взаимно блокируемого передаточного вала 19 посредством силы тяжести. Соответственно, при поддержании модулей 10, 11 наклоняемых конвейеров всех узлов 1A-1E в горизонтальной ориентации для транспортировки, электродвигатель 20 привода конвейеров эксплуатируют так, как описано выше, для предусматривающего взаимную блокировку приведения ленточных конвейеров 23a, 23b во вращение в предварительно определенном направлении транспортировки, и тогда поддон T, нагруженный транспортируемым объектом, посылаемым с вносящего конвейера 2, показанного на фиг.1A и фиг.1B, можно транспортировать к выносящему конвейеру 3 с некоторой постоянной скоростью и отправлять на выносящий конвейер 3.
[0023] Когда некоторый конкретный модуль 10, 11 наклоняемого конвейера переключают от горизонтальной ориентации для транспортировки к ориентации под наклоном для сортировки в состоянии транспортировки поддона, в котором ленточные конвейеры 23a, 23b модулей 10, 11 наклоняемых конвейеров всех узлов 1A-1E эксплуатируют так, как описано выше, приводят в действие электродвигатель 12/13 наклона модуля 10/11 наклоняемого конвейера, подлежащего переключению на ориентацию под наклоном. В связи с этим, целевой модуль 10/11 наклоняемого конвейера можно наклонять вокруг опорного вала 7 (взаимно блокируемого передаточного вала 19) в предварительно определенном направлении за счет некоторого угла поворота с помощью навиваемого средства 30/31 передачи. Когда модуль 10/11 наклоняемого конвейера, принявший ориентацию под наклоном, возвращают к исходной горизонтальной ориентации для транспортировки, электродвигатель 12/13 наклона модуля 10/11 наклоняемого конвейера обеспечивает поворот в обратном направлении на упомянутый угол поворота во время операции наклона, и модуль 10/11 наклоняемого конвейера может возвращаться от ориентации под наклоном к исходной горизонтальной ориентации для транспортировки.
[0024] В случаях, когда транспортируемый объект, нагруженный на поддоне T, посылаемом с вносящего конвейера 2, является целевым, подлежащим сортировке в некоторой определенной зоне установки для транспортировки и сортировки, как показано на фиг.7, когда поддон T перемещается на некоторое определенное расстояние от вносящего конвейера 2 и входит в состояние, в котором весь поддон Т в целом опирается на множество модулей 10, 11 наклоняемых конвейеров, множеству модулей наклоняемых конвейеров, находящихся в зоне, где на них опирается поддон Т, сообщают качание к стороне сортировки с переключением от горизонтальной ориентации к ориентации под наклоном, и перемещающийся поддон T, которому служат опорой модули наклоняемых конвейеров, наклоняется на сторону сортировки на некоторый требуемый угол. В результате, транспортируемый объект W, находящийся на поддоне T, скользит на поддоне T к нижней стороне угла наклона посредством силы тяжести, а потом соскальзывает сверху поддона T. В общем случае, рядом размещают желоб 37, принимающий транспортируемый объект W, соскальзывающий сверху поддона T в ориентации под наклоном, и направляющий этот объект на целевой стол для манипуляций. После завершения сортировки, множество модулей наклоняемых конвейеров в зоне, где на них опирается поддон T, переключаются от ориентации под наклоном к горизонтальной ориентации, а управление каждым модулем 10, 11 наклоняемого конвейера таково, что поддон T достигает на модулях 10, 11 наклоняемых конвейеров узла 1E на его завершающем конце, имеющем горизонтальную ориентацию. В связи с этим, пустой поддон T после сортировки может быть отправлен на находящийся дальше по ходу выносящий конвейер 3 из установки для транспортировки и сортировки.
[0025] Даже во время переключения модулей 10, 11 наклоняемых конвейеров от горизонтальной ориентации к ориентации под наклоном для вышеописанной операции сортировки и во время переключения модулей 10, 11 наклоняемых конвейеров от ориентации под наклоном к горизонтальной ориентации после завершения сортировки, транспортировка поддона T продолжается ленточными конвейерами 23a, 23b, предусмотренными для каждого модуля 10/11 наклоняемого конвейера. Таким образом, чтобы поддон T, охватываемый с двух сторон между модулями 10, 11 наклоняемых конвейеров, имеющих разную ориентацию, больше не имел опоры, управление ориентацией каждого модуля 10, 11 наклоняемого конвейера осуществляют в соответствии со скоростью транспортировки поддонов модулями 10, 11 наклоняемых конвейеров таким образом, что только требуемое количество модулей 10, 11 наклоняемых конвейеров, имеющих такую же ориентацию, как модули 10, 11 наклоняемых конвейеров, служащие опорами и транспортирующими поддон T в это время, всегда присутствуют на расположенной против хода стороне поддона T. Управление переключением ориентации модулей 10, 11 наклоняемых конвейеров осуществляют на основе текущего положения поддона T, транспортируемого модулями 10, 11 наклоняемых конвейеров установки для транспортировки и сортировки. Далее будет описана конфигурация для обнаружения текущего положение поддона T.
[0026] Как показано на фиг.2, фиг.3 и фиг.8, между модулями 10, 11 наклоняемых конвейеров, смежными друг к другу в направлении вперед-назад посредством опорных элементов 34, 35 расположена пара левого и правого фотоэлектрических датчиков 32, 33. Из опорных элементов 34, 35, опорный элемент 34, расположенный между составляющими пару правым и левым модулями 10, 11 наклоняемых конвейеров каждого узла 1A-1E, крепится на опорном основании 36, на виде сбоку имеющем форму портала и установленном на раме 16, в некотором промежуточном положении между составляющими пару левым и правым электродвигателями 12, 13 наклона, предусмотренными для каждого узла 1A-1E и расположенными ниже опорного вала 7. Каждый из опорных элементов 35, находящихся между соседними узлами 1A, 1B, между соседними узлами 1B, 1C, между соседними узлами 1C, 1D и между соседними узлами 1D, 1E, закреплен на опорном основании 17а подшипников, служащем опорой подшипникам 6, 5 на обеих - левой и правой - сторонах соединения 18 валов, находящимся в том же положении.
[0027] Опорный элемент 34 состоит из ограждающего листового материала 34a, охватывающего с двух сторон опорный вал 7, и имеет обе ножки, закрепленные на опорном основании 36. Опорный элемент 35 состоит из ограждающего листового материала 35a, охватывающего с двух сторон соединение 18 валов, и имеет обе ножки, закрепленные на опорном основании 17а подшипников. Как показано на фиг.2, опорные элементы 34, 35 предусмотрены в положениях, которые ближе к модулям 10, 11 наклоняемых конвейеров, размещенных на расположенной против хода стороне, чем центральное - в направлении ширины - положение зазора между модулями 10, 11 наклоняемых конвейеров на обеих - левой и правой - сторонах опорных элементов 34, 35. На боковых поверхностях на расположенной против хода стороне опорных элементов 34, 35 закреплены фотоэлектрические датчики 32, 33. Таким образом, имеет место конфигурация, при которой появляется возможность быстро обнаруживать поддон T, попадающий в зазор между обоими - правым и левым - модулями 10, 11 наклоняемых конвейеров с расположенной против хода стороны.
[0028] Фотоэлектрический датчик 32, 33 представляет собой датчик того типа, в котором предусматривается участок излучения и приема света. Когда луч света, излучаемый с участка излучения света, отражается нижней поверхностью поддона T, проходящего через зазор между модулями 10, 11 наклоняемых конвейеров, участок приема принимает отраженный луч света, после чего фотоэлектрический датчик 32, 33 входит в состояние включения обнаружения транспортируемого объекта. Как показано на фиг.2, фотоэлектрического датчик 32, 33 прикреплен к опорному элементу 34, 35 в некотором положении, которое на виде сбоку выше опорного вала 7. Как показано на фиг.9, левый фотоэлектрический датчик 32 крепится таким образом, что оптическая ось 32a в соответствующем ей направлении излучения луча света наклонена на 22,5° в левую сторону по отношению к вертикальной линии 7a, проходящей - на виде спереди - через осевой центр опорного вала 7. Угол 22,5° наклона оптической оси 32a составляет половину угла 45° наклона модуля 10, 11 наклоняемого конвейера к ориентации P2 под наклоном в левую сторону. Как показано на фиг.8, правый фотоэлектрический датчик 33 закреплен таким образом, что оказывается двухсторонне-симметричным с левым фотоэлектрическим датчиком 32, и поэтому его оптическая ось 33наклонена на 22,5° в правую - на виде спереди - сторону по отношению к вертикальной линии 7a.
[0029] Угол наклона в направлении излучения луча света фотоэлектрического датчика 32, 33 можно задать следующим образом. То есть, описывая левый фотоэлектрический датчик 32 в качестве примера, отмечаем, что угол наклона в направлении излучения луча света фотоэлектрического датчика 32, 33 задают в соответствии с углом наклона модуля 10, 11 наклоняемого конвейера (поддона T), углом раствора зоны отражения луча света из фотоэлектрического датчика 32, 33 и расстоянием между поверхностью, подлежащей обнаружению (нижней поверхностью поддона T) и фотоэлектрическим датчиком 32, 33, и т.д., так что, как показано на фиг.9A, когда модули 10, 11 наклоняемых конвейеров имеют горизонтальную ориентацию P1, луч света, излучаемый по диагонали влево вверх с участка излучения света фотоэлектрического датчика 32, отражается по диагонали влево вниз горизонтальной нижней поверхностью поддона T, а участок приема фотоэлектрического датчика 32 находится в некотором положении около правого конца зоны отражения 32b луча света и оказывается возможным прием отраженного луча света, а когда модули 10, 11 наклоняемых конвейеров имеют ориентацию P2 под наклоном в левую сторону, луч света, излучаемый по диагонали влево вверх с участка излучения света фотоэлектрического датчика 32, отражается по диагонали вправо вниз наклоненной нижней поверхностью поддона T, а участок приема фотоэлектрического датчика 32 находится в положении около левого конца зоны отражения 32b луча света, и оказывается возможным прием отраженного луча света.
[0030] Естественно, поскольку фотоэлектрический датчик 32 - это датчик, который обнаруживает поддон T, проходящий между модулями 10, 11 наклоняемых конвейеров, когда модули 10, 11 наклоняемых конвейеров имеют либо горизонтальную ориентацию P1, либо ориентацию P2 под наклоном влево или некоторую промежуточную ориентацию между ними, а фотоэлектрический датчик 33 - это датчик, который обнаруживает поддон T, проходящий между модулями 10, 11 наклоняемых конвейеров, когда модули 10, 11 наклоняемых конвейеров имеют либо горизонтальную ориентацию P1, либо ориентацию P2 под наклоном вправо или некоторую промежуточную ориентацию между ними, фотоэлектрический датчик - один из фотоэлектрических датчиков 32, 33 - на стороне, не находящейся в направлении сортировки, можно исключить, когда направление сортировки транспортируемого объекта на поддоне T является только одним из направления влево и вправо. Хотя изображен фотоэлектрический датчик 32, 33, представляющий собой датчик того типа, в котором предусматривается участок излучения и приема света, можно также использовать фотоэлектрический датчик другого типа, в котором предусматривается разделение участков излучения и приема света, т.е., в котором участок излучения света и участок приема света разделены, а соответственные положения установки могут быть изменены. Кроме того, возможна такая конфигурация, в которой предусмотрены основной фотоэлектрический датчик, обнаруживающий транспортируемый объект, проходящий между модулями 10, 11 наклоняемых конвейеров, когда модули 10, 11 наклоняемых конвейеров имеют горизонтальную ориентацию, и вспомогательный фотоэлектрический датчик, обнаруживающий транспортируемый объект, проходящий между модулями 10, 11 наклоняемых конвейеров, когда модули 10, 11 наклоняемых конвейеров имеют ориентацию под наклоном, а транспортируемый объект может быть обнаружен, по меньшей мере, одним из основного фотоэлектрического датчика и вспомогательного фотоэлектрического датчика, когда модули 10, 11 наклоняемых конвейеров оказываются наклоненными между горизонтальной ориентацией и ориентацией под наклоном.
[0031] Когда, как описано выше, предусмотрены фотоэлектрические датчики 32, 33, можно определить ситуацию, в которой передний конец поддона T движется на модуле 10/11 наклоняемого конвейера, соседствующем расположенной против хода стороне положений фотоэлектрических датчиков 32, 33 среди множества фотоэлектрических датчиков 32, 33 в направлении транспортировки в состоянии включения обнаружения транспортируемого объекта на переднем конце в направлении транспортировки, а задний конец поддона T движется на модуле 10/11 наклоняемого конвейера соседними на расположенной по ходу стороне положений фотоэлектрических датчиков 32, 33 на заднем конце в направлении транспортировки в состоянии включения обнаружения транспортируемого объекта. Таким образом, осуществляя вышеописанное управление ориентацией модулей 10, 11 наклоняемых конвейеров на основе результатов обнаружения, обеспечивают операцию, в процессе которой транспортируемый объект на поддоне T в горизонтальной ориентации, посылаемый со вносящего конвейера 2, сортируют, наклоняя поддон T в некотором предварительно определенном направлении, а также обеспечивают возврат пустого поддона T к горизонтальной ориентации после сортировки и отправку поддона T к выносящему конвейеру 3.
[0032] Когда переключение ориентации каждого модуля 10, 11 наклоняемого конвейера между горизонтальной ориентацией P1 и ориентацией под наклоном P2/P3 осуществляют посредством электродвигателя 12, 13 наклона, необходимо обнаружить, которую ориентацию из горизонтальной ориентации P1, ориентации Р2 под наклоном влево или ориентации Р3 под наклоном вправо приобретает каждый модуль 10, 11 наклоняемого конвейера. Вариант осуществления средства обнаружения ориентации для этого будет описан на основе фиг.2, фиг.3 и фиг.10. Для расположения фотоэлектрических датчиков 32, 33 между составляющими пару правым и левым модулями 10, 11 наклоняемых конвейеров каждого узла 1A-1E предусмотрены четыре детектора 38a-38d, каждый из которых крепится справа и слева снаружи к паре правого и левого вертикальных участков 36a, 36b пластин опорного основания 36, на виде сбоку имеющего форму портала. Подлежащие обнаружению пластины 39, свисающие наружу с пары правого и левого вертикальных участков 36a, 36b пластин опорного основания 36, крепятся к конструкции 22, чтобы соединить четыре детектора 38a-38d.
[0033] Каждая подлежащая обнаружению пластина 39 имеет на виде спереди U-образную форму и расположена так, что опорный вал 7 проходит сквозь нее. Каждая подлежащая обнаружению пластина 39 имеет оба - левый и правый - верхние концевые участки, закрепленные под конструкцией 22 модуля 10, 11 наклоняемого конвейера, и включает в себя участок 39а пластины, подлежащей обнаружению, простирающийся в направлении, проходящем непосредственно под опорным валом 7, когда модуль 10, 11 наклоняемого конвейера имеет горизонтальную ориентацию P1. Из четырех детекторов 38a-38d, детектор 38a обнаруживает участок 39а пластины, подлежащей обнаружению, когда модуль 10, 11 наклоняемого конвейера имеет горизонтальную ориентацию P1, детектор 38b обнаруживает участок 39а пластины, подлежащей обнаружению, когда модуль 10, 11 наклоняемого конвейера имеет ориентацию Р2 под наклоном влево (45° влево), детектор 38c обнаруживает участок 39а пластины, подлежащей обнаружению, когда модуль 10, 11 наклоняемого конвейера имеет ориентацию Р3 под наклоном вправо (45° вправо), а детектор 38d обнаруживает участок 39а пластины, подлежащей обнаружению, когда модуль 10, 11 наклоняемого конвейера имеет исходную ориентацию P4 (50° влево), при которой наклон согласно ориентации под наклоном влево (45° влево) превышается примерно на 5°. В качестве детекторов 38a-38d можно использовать бесконтактный переключатель, когда участок 39а пластины, подлежащей обнаружению, является металлическим, а бесконтактный переключатель емкостного типа можно использовать даже тогда, когда участок 39а пластины, подлежащей обнаружению, является пластмассовым. Можно также использовать отражающий фотоэлектрический датчик, подковообразный (пазообразный) фотоэлектрический датчик, концевой выключатель контактного типа, и т.д.
[0034] В соответствии с вышеописанным средством обнаружения ориентации, управление электродвигателем 12, 13 наклона, сообщающим наклон модулю 10, 11 наклоняемого конвейера, осуществляют на основе сигналов обнаружения из детекторов 38a-38c, а электродвигатель 12, 13 наклона можно автоматически останавливать в целевой ориентации. Если аномальный останов модуля 10 наклоняемого конвейера, 11, наклоненного для переключения ориентации, происходит в некотором незаданном положении в пределах диапазона наклона от ориентации Р2 под наклоном влево (45° влево) к ориентации Р3 под наклоном вправо (45° вправо), модуль 10, 11 наклоняемого конвейера принудительно наклоняют влево, даже если нельзя подтвердить положение аномального останова, и модуль 10, 11 наклоняемого конвейера временно останавливают, когда детектор 38d обнаруживает, что модуль 10, 11 наклоняемого конвейера достигает исходной ориентации P4 (50° влево), а после этого можно принудительно восстановить для модуля 10, 11 наклоняемого конвейера любую из ориентации Р2 под наклоном влево, горизонтальной ориентации P1 и ориентации Р3 под наклоном вправо. То есть, когда возникает ситуация аномального наклона модуля 10, 11 наклоняемого конвейера, для этого модуля 10, 11 наклоняемого конвейера оказывается возможным эффективное восстановление целевой ориентации путем автоматического проведения вышеописанной операции в отношении аномально остановленного модуля 10, 11 наклоняемого конвейера без подтверждения положения аномального останова визуально или с помощью различных датчиков. Исходную ориентацию P4 можно задавать в некотором положении вне ориентации Р3 под наклоном вправо, а угол перехода от ориентации Р2 под наклоном влево или ориентации P3 под наклоном вправо к исходной ориентации не ограничивается вышеописанным значением 5° и может быть задан равным любому углу.
[0035] В вышеописанном варианте осуществления конфигурация транспортируемого объекта (поддона T), проходящего между модулями 10, 11 наклоняемых конвейеров, обеспечивает его обнаружение фотоэлектрическими датчиками 32, 33. Вместе с тем, если потребуется в контексте управления, конфигурацию можно сделать такой, что обнаружение транспортируемого объекта, перемещаемого на модуль 10 наклоняемого конвейера узла 1A на начальном конце со вносящего конвейера 2, и обнаружение транспортируемого объекта, перемещаемого на выносящий конвейер 3 с модуля наклоняемого конвейера 11 узла 1E на его завершающем конце, можно осуществлять посредством фотоэлектрических датчиков 32, 33.
[0036] Кроме того, ограждающий листовой материал 34a, охватывающий с двух сторон опорный вал 7, приведен в качестве примера опорного элемента 34, а ограждающий листовой материал 35a, охватывающий с двух сторон соединение 18 валов - в качестве примера опорного элемента 35. Вместе с тем, фотоэлектрические датчики 32, 33 можно крепить соответственно к двум листовым материалам, крепящимся к опорному основанию 36. Можно также позаимствовать такую конфигурацию, что листовые материалы будут консольными, а не имеющими форму портала, для крепления фотоэлектрических датчиков 32, 33.
[0037] В варианте осуществления, проиллюстрированном выше, транспортируемый объект, транспортируемый средствами транспортировки (ленточными конвейерами 23a, 23b в этом варианте осуществления), предусмотренными для модуля наклоняемого конвейера, на практике представляет собой поддон T, груженый изделием, подлежащим сортировке. Вместе с тем, установка для транспортировки и сортировки в соответствии с данным изобретением может на практике транспортировать непосредственно само изделие с помощью средств транспортировки модуля наклоняемого конвейера. Установке для транспортировки и сортировки в соответствии с данным изобретением нужно лишь придать конфигурацию, предусматривающую наличие множества модулей наклоняемых конвейеров, расположенных в ряд в направлении транспортировки, и возможность опереть каждый из модулей наклоняемых конвейеров сверху на раму с возможностью качания влево и вправо вокруг опорного вала, параллельного направлению транспортировки между горизонтальной ориентацией и ориентацией под наклоном для выпуска транспортируемого объекта в поперечном направлении - по отношению к направлению транспортировки - посредством силы тяжести, а конкретная конструкция, иллюстрируемая в рассмотренном варианте осуществления, ограничением не является.
ПРОМЫШЛЕННАЯ ПРИМЕНИМОСТЬ
[0038] Установку для транспортировки и сортировки согласно данному изобретению можно использовать как такую установку для транспортировки и сортировки транспортируемых объектов, в которой транспортируемый объект нагружают на специально выделенный для транспортировки поддон и транспортируют на нем, а также удовлетворяют требование автоматической сортировки в соответствии с пунктом назначения как при транспортировке и сортировке багажа в аэропортах.
ПЕРЕЧЕНЬ ССЫЛОЧНЫХ ПОЗИЦИЙ
[0039] 1A-1E Узел
2 Вносящий конвейер
3 Выносящий конвейер
7 Опорный вал
8a-9b Подшипник
10, 11 Модуль наклоняемого конвейера
12, 13 Электродвигатель наклона
17 Столбчатый опорный элемент
17а Опорное основание подшипников
18 Соединение валов
19 Взаимно блокируемый передаточный вал
20 Электродвигатель привода конвейеров
21, 28, 30, 31 Навиваемое средство передачи
22 Конструкция модуля наклоняемого конвейера
23a, 23b Ленточный конвейер
24a, 24b Боковая направляющая
29 Коробка передач
27 Общий приводной вал
32, 33 Фотоэлектрический датчик
34, 35 Опорный элемент
34a, 35 Ограждающий листовой материал
36 Опорное основание, имеющее на виде сбоку форму портала
36a, 36b Участок вертикальной пластины
38a-38d Детектор
39 Пластина, подлежащая обнаружению
39a Участок пластины, подлежащей обнаружению
T Поддон для нагружения транспортируемого объекта
W транспортируемый объект
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВКА ДЛЯ ТРАНСПОРТИРОВКИ И СОРТИРОВКИ | 2019 |
|
RU2767089C1 |
| УСТАНОВКА ДЛЯ ТРАНСПОРТИРОВКИ И СОРТИРОВКИ | 2019 |
|
RU2760052C1 |
| УСТАНОВКА ДЛЯ ТРАНСПОРТИРОВКИ И СОРТИРОВКИ | 2019 |
|
RU2768099C1 |
| УСТРОЙСТВО ОТКЛОНЕНИЯ/ОБЪЕДИНЕНИЯ ДЛЯ ТРАНСПОРТНОГО ОБОРУДОВАНИЯ | 2019 |
|
RU2768075C1 |
| КОНВЕЙЕР | 2021 |
|
RU2769558C1 |
| КРИВОЛИНЕЙНЫЙ КОНВЕЙЕР | 2019 |
|
RU2760057C1 |
| ТРАНСПОРТИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ ПОДЪЕМА/ОПУСКАНИЯ КОНТЕЙНЕРА, ПРЕДНАЗНАЧЕННОГО ДЛЯ ТРАНСПОРТИРОВКИ ИЗДЕЛИЙ | 2015 |
|
RU2714659C2 |
| ДИАГОНАЛЬНЫЙ СОРТИРОВЩИК | 2010 |
|
RU2526115C2 |
| СОРТИРОВОЧНАЯ СИСТЕМА И СПОСОБ СОРТИРОВКИ ОБЪЕКТОВ | 2020 |
|
RU2743623C1 |
| Устройство слежения приемной панели за Солнцем | 2022 |
|
RU2801633C1 |
Установка для транспортировки и сортировки, например багажа в аэропортах, содержит: множество модулей 10, 11 наклоняемых конвейеров, расположенных в ряд в направлении транспортировки и отражающие фотоэлектрические датчики 32, 33. Модули 10, 11 наклоняемых конвейеров оперты сверху на раму 16 с возможностью качания влево и вправо вокруг опорного вала 7, параллельного направлению транспортировки, между горизонтальной ориентацией для транспортировки и ориентацией под наклоном для выпуска транспортируемого объекта - посредством силы тяжести - в направлении, поперечном по отношению к направлению транспортировки. Фотоэлектрические датчики 32, 33 обнаруживают транспортируемые объекты (поддоны Т), которые проходят между модулями 10, 11 наклоняемых конвейеров, посредством лучей света, которые проходят в вертикальном направлении между модулями 10, 11 наклоняемых конвейеров, которые соединены в направлении транспортировки. Отражающие фотоэлектрические датчики 32, 33 крепятся к опорному элементу 34, который предусмотрен окружающим периферию опорного вала и который оперт посредством рамы 16. Обнаружение транспортируемого объекта в зоне сортировки можно осуществлять в высшей степени точно и надежно. 3 н. и 4 з.п. ф-лы, 12 ил.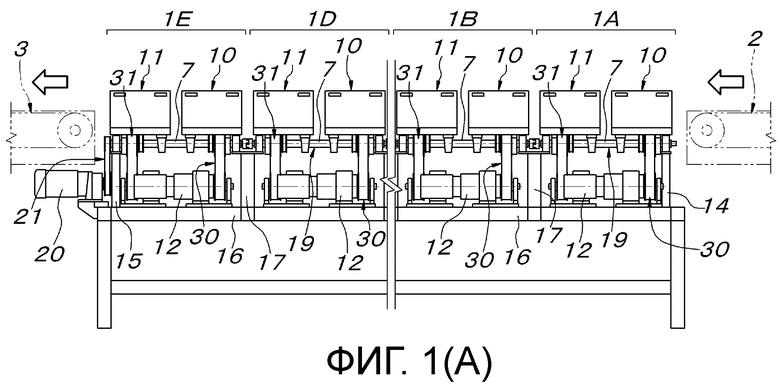
1. Установка для транспортировки и сортировки, включающая в себя множество модулей наклоняемых конвейеров (10, 11), расположенных в ряд в направлении транспортировки, причем каждый из модулей (10, 11) наклоняемых конвейеров опирается сверху на раму (16) с возможностью качания влево и вправо вокруг опорного вала (7), параллельного направлению транспортировки транспортируемого объекта, между горизонтальной ориентацией для транспортировки и ориентацией под наклоном для выпуска транспортируемого объекта - посредством силы тяжести - в направлении, поперечном по отношению к направлению транспортировки, в которой
расположен отражающий фотоэлектрический датчик (32, 33), обнаруживающий транспортируемый объект, проходящий между модулями (10, 11) наклоняемых конвейеров, смежными друг к другу в направлении транспортировки, посредством луча света, проходящего вертикально через зазор между модулями (10, 11) наклоняемых конвейеров, и фотоэлектрический датчик (32, 33) прикреплен к опорному элементу (34, 35), опирающемуся на раму (16) и расположенному в некотором положении около опорного вала (7),
при этом опорный вал (7) имеет соединительный участок, присоединенный посредством соединения (18) валов в некотором положении между модулями (10, 11) наклоняемых конвейеров, смежными друг к другу в направлении транспортировки, и этот соединительный участок снабжен парой подшипников (5, 6), служащих опорами концевым участкам каждого опорного вала (7) на обеих сторонах соединения (18) валов, и опорным основанием (17а) подшипников, установленным над рамой (16) и служащим опорой паре подшипников (5, 6), причем фотоэлектрический датчик (32, 33), расположенный между модулями (10, 11) наклоняемых конвейеров в том положении, где находится соединительный участок, прикреплен к опорному элементу (35), состоящему из ограждающего листового материала (35а), охватывающего с двух сторон соединение (18) валов, а ограждающий листовой материал (35а) имеет обе ножки, закрепленные на опорном основании (17а) подшипников.
2. Установка для транспортировки и сортировки по п.1, в которой опорный элемент (34) состоит из ограждающего листового материала (34а), охватывающего с двух сторон опорный вал (7), и этот ограждающий листовой материал (34а) имеет обе ножки, закрепленные на несущем основании (36), установленном на раме (16) таким образом, что они находятся ниже опорного вала (7).
3. Установка для транспортировки и сортировки по п.1, в которой фотоэлектрический датчик (32, 33) расположен выше, чем опорный вал (7), если смотреть сбоку.
4. Установка для транспортировки и сортировки, включающая в себя множество модулей наклоняемых конвейеров (10, 11), расположенных в ряд в направлении транспортировки, причем каждый из модулей (10, 11) наклоняемых конвейеров опирается сверху на раму (16) с возможностью качания влево и вправо вокруг опорного вала (7), параллельного направлению транспортировки транспортируемого объекта, между горизонтальной ориентацией для транспортировки и ориентацией под наклоном для выпуска транспортируемого объекта - посредством силы тяжести - в направлении, поперечном по отношению к направлению транспортировки, в которой
расположен отражающий фотоэлектрический датчик (32, 33), обнаруживающий транспортируемый объект, проходящий между модулями (10, 11) наклоняемых конвейеров, смежными друг к другу в направлении транспортировки, посредством луча света, проходящего вертикально через зазор между модулями (10, 11) наклоняемых конвейеров, и фотоэлектрический датчик (32, 33) прикреплен к опорному элементу (34, 35), опирающемуся на раму (16) и расположенному в некотором положении около опорного вала (7),
при этом фотоэлектрический датчик (32, 33) прикреплен так, что направление излучения его луча света наклонено - по отношению к вертикальному направлению - на стороне направления наклона к ориентации под наклоном модуля (10, 11) наклоняемого конвейера, а угол наклона направления излучения задан равным углу, дающему возможность обнаружения, как транспортируемого объекта, перемещаемого между модулями (10, 11) наклоняемых конвейеров, когда модули (10, 11) наклоняемых конвейеров имеют горизонтальную ориентацию, так и транспортируемого объекта, перемещаемого между модулями (10, 11) наклоняемых конвейеров, когда модули (10, 11) наклоняемых конвейеров имеют ориентацию под наклоном.
5. Установка для транспортировки и сортировки по п.4, в которой опорный элемент (34) состоит из ограждающего листового материала (34а), охватывающего с двух сторон опорный вал (7), и этот ограждающий листовой материал (34а) имеет обе ножки, закрепленные на несущем основании (36), установленном на раме (16) таким образом, что они находятся ниже опорного вала (7).
6. Установка для транспортировки и сортировки по п.4, в которой фотоэлектрический датчик (32, 33) расположен выше, чем опорный вал (7), если смотреть сбоку.
7. Установка для транспортировки и сортировки, включающая в себя множество модулей (10, 11) наклоняемых конвейеров, расположенных в ряд в направлении транспортировки, причем каждый из модулей (10, 11) наклоняемых конвейеров опирается сверху на раму с возможностью качания влево и вправо вокруг опорного вала (8), параллельного направлению транспортировки, между горизонтальной ориентацией для транспортировки и ориентацией под наклоном для выпуска транспортируемого объекта - посредством силы тяжести - в направлении, поперечном по отношению к направлению транспортировки, в которой
расположен отражающий фотоэлектрический датчик (32, 33), обнаруживающий транспортируемый объект, проходящий между модулями (10, 11) наклоняемых конвейеров, смежными друг к другу в направлении транспортировки, посредством луча света, проходящего вертикально через зазор между модулями (10, 11) наклоняемых конвейеров, и этот фотоэлектрический датчик (32, 33) прикреплен так, что направление излучения его луча света наклонено - по отношению к вертикальному направлению - на стороне направления наклона к ориентации под наклоном модуля (10, 11) наклоняемого конвейера, а угол наклона направления излучения задан равным углу, дающему возможность обнаружения, как транспортируемого объекта, перемещаемого между модулями (10, 11) наклоняемых конвейеров, когда модули (10, 11) наклоняемых конвейеров имеют горизонтальную ориентацию, так и транспортируемого объекта, перемещаемого между модулями (10, 11) наклоняемых конвейеров, когда модули (10, 11) наклоняемых конвейеров имеют ориентацию под наклоном.
| УСТРОЙСТВО ДЛЯ МОЙКИ КОРНЕКЛУБНЕПЛОДОВ | 2022 |
|
RU2782855C1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| US 6193074 B1, 27.02.2001 | |||
| US 7128202 B2, 31.10.2006. | |||

