ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к криволинейному конвейеру, установленному на горизонтальном криволинейном участке пути на пути транспортировки, для транспортировки транспортируемого объекта, имеющего постоянную ширину.
УРОВЕНЬ ТЕХНИКИ
[0002] Как описано в патентном документе 1, в качестве криволинейного конвейера этого типа известен криволинейный конвейер, в котором конические приводные ролики расположены радиально через одинаковые интервалы в окружном направлении таким образом, что продолжение приводного ролика от осевого центра проходит через центр дуги горизонтального криволинейного участка пути, а конец, имеющий малый диаметр, ориентирован так, что находится на стороне, обращенной к центру дуги. Конфигурация, предусматривающая применение конических приводных роликов, предназначена для сообщения транспортируемому объекту движения по горизонтальному криволинейному участку пути с такой же скоростью, как скорость движения на прямом участке пути, за счет придания внешней стороне (внешняя сторона, когда сторона ближе к центру дуги, определяется как внутренняя сторона) транспортируемого объекта, попадающего на горизонтальный криволинейный участок пути с прямого участка пути, скорости движения, большей чем скорость транспортировки транспортируемого объекта на прямом участке пути, и придания внутренней стороне транспортируемого объекта меньшей скорости движения таким образом, что скорость движения в центральном положении ширины транспортируемого объекта, движущегося по горизонтальному криволинейному участку пути, становится такой же, как скорость движения на прямом участке пути. Поэтому вполне логично предположить, что транспортируемому объекту можно сообщить движение по горизонтальному криволинейному участку пути так же, как упоминалось выше, даже если ведущие колеса, движущиеся с окружной скоростью, эквивалентной окружной скорости участков концов, имеющих большой диаметр, конических приводных роликов расположены через надлежащие интервалы вдоль горизонтального криволинейного участка пути в положениях, соответствующих участкам концов, имеющих большой диаметр, конических приводных роликов, а обращенная внутрь конвейера сторона транспортируемого объекта опирается на колеса без самостоятельного привода.
ПЕРЕЧЕНЬ ЦИТИРУЕМЫХ ДОКУМЕНТОВ
Патентные документы
[0003] Патентный документ 1: опубликованная не рассмотренная заявка на патент Японии № S60-12406
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Техническая задача
[0004] Вместе с тем, даже в конфигурации, предусматривающей применение ведущих колес аналогично коническим приводным роликам, в некотором положении около внешней стороны транспортируемого объекта существует разница между скоростью транспортировки транспортируемого объекта на прямом участке пути и окружной скоростью ведущего колеса. Следовательно, в процессе переноса, в котором транспортируемый объект движется, занимая прямой участок пути и горизонтальный криволинейный участок пути на входе и выходе обоих концов горизонтального криволинейного участка пути, происходит проскальзывание между ведущим колесом или средством транспортировки, находящимся на прямом участке пути, и транспортируемым объектом, что приводит к износу ведущего колеса и средства транспортировки, находящегося на прямом участке пути, или транспортируемого объекта. В дополнение к этому, поведение транспортируемого объекта становится нестабильным. Кроме того, когда ведущему колесу, находящемуся около внешней стороны транспортируемого объекта на горизонтальном криволинейном участке пути, сообщают окружную скорость, эквивалентную скорости транспортировки транспортируемого объекта на прямом участке пути, скорость движения транспортируемого объекта на горизонтальном криволинейном участке пути становится меньшей, чем скорость движения на прямом участке пути. Таким образом, эффективность транспортировки снижается, а расстояние между передним и задним транспортируемыми объектами, продвигающимися на прямом участке пути, сокращается на горизонтальном криволинейном участке пути, и когда расстояние между передним и задним транспортируемыми объектами на прямом участке пути мало, это обуславливает недостаток, заключающийся в том, что передний и задний транспортируемые объекты толкают друг друга, положения их утрачивают выравнивание, а сами транспортируемые объекты оказываются прижатыми к одной из двух - внутренней и внешней - дугообразных направляющих, регулирующих ширину горизонтального криволинейного участка пути, после чего останавливаются.
Решение задачи
[0005] В данном изобретении предложен криволинейный конвейер, способный решить традиционную задачу, описанную выше. Характеризуемый посредством задания позиций чертежей в скобках, употребляемых в описании варианта осуществления, приводимом ниже, чтобы облегчить понимание взаимосвязи с вариантом осуществления, криволинейный конвейер в соответствии с настоящим изобретением представляет собой криволинейный конвейер (1), установленный на горизонтальном криволинейном участке (8) пути на пути транспортировки, включающий в себя ряд (14) внутренних колес без самостоятельного привода, расположенный вдоль горизонтального криволинейного участка (8) пути на внутренней стороне, где находится центр дуги, по отношению к дугообразной центральной линии (8a), проходящей через центр ширины (L2) пути горизонтального криволинейного участка (8) пути, и ряд (13) внешних ведущих колес, расположенный вдоль горизонтального криволинейного участка (8) пути на внешней стороне, которая противоположна стороне, где находится центр дуги, по отношению к дугообразной центральной линии (8a), при этом расстояние (D1) от дугообразной центральной линии (8a) до ряда (13) внешних ведущих колес короче, чем расстояние (D2) от дугообразной центральной линии (8a) до ряда (14) внутренних колес без самостоятельного привода.
Преимущества изобретения
[0006] В соответствии с вышеописанной конфигурацией данного изобретения, скорость движения транспортируемого объекта на прямом участке пути, соединенном с горизонтальным криволинейным участком пути, и окружная скорость каждого ведущего колеса ряда внешних ведущих колес, предусмотренные для горизонтального криволинейного участка пути, заданы находящимися на одном и том же уровне, и можно избежать нежелательных эффектов, таких, как проскальзывание, износ и нестабильное поведение транспортируемого объекта, обуславливаемые разницей между возникающими при движении скоростями по отношению к транспортируемому объекту в процессе переноса транспортируемого объекта между горизонтальным криволинейным участком пути и прямым участком пути. Кроме того, поскольку положение ряда внешних ведущих колес, предусмотренное для горизонтального криволинейного участка пути, сделано находящимся ближе к обращенной к центру стороне ширины транспортируемого объекта, скорость движения транспортируемого объекта, движущегося по горизонтальному криволинейному участку пути, увеличивается посредством тяги, воспринимаемой от ряда внешних ведущих колес, и разница со скоростью движения транспортируемого объекта на прямом участке пути снижается по сравнению со случаем, в котором положение ряда внешних ведущих колес находится в некотором положении, где они служат опорой внешней стороне транспортируемого объекта. В результате, расстояние между передним и задним транспортируемыми объектами, продвигающимися на прямом участке пути, можно сделать более узким, чем расстояние, обычно требуемое во избежание аномального толкания на горизонтальном криволинейном участке пути, и можно предотвратить снижение эффективности транспортировки.
[0007] При воплощении данного изобретения, изложенного выше, ряд (13) внешних ведущих колес может состоять из ведомых колес (16), шарнирно опертых через надлежащие интервалы на внешнее несущее средство (18), предусмотренное вдоль горизонтального криволинейного участка (8) пути, ведущее колесо (17), соединенное с возможностью взаимоблокировки с приводным электродвигателем (15), и передачу (21), соединяющую с возможностью взаимоблокировки ведомые колеса (16) и ведущее колесо (17) друг с другом, а ряд (14) внутренних колес без самостоятельного привода может состоять из колес (25) без самостоятельного привода, шарнирно опертых через интервалы, более широкие, чем интервалы между колесами ряда (13) внешних ведущих колес, на внутреннее несущее средство (26), предусмотренное вдоль горизонтального криволинейного участка (8) пути, а обе - внутреннюю и внешнюю - боковые направляющие (40a, 40b), регулирующие ширину пути движения транспортируемого объекта на горизонтальном криволинейном участке (8) пути, можно предусмотреть двухсторонне (билатерально) симметричными по отношению к дугообразной центральной линии, проходящей через центр ширины пути горизонтального криволинейного участка (8) пути. Конкретнее, ряд (13) внешних ведущих колес может состоять из ведомых колес (16), шарнирно опертых консольно через надлежащие интервалы на одну сторону внешней дугообразной несущей пластины (18), предусмотренной вдоль горизонтального криволинейного участка (8) пути, ведущего колеса (17), соединенного с возможностью взаимоблокировки с приводным электродвигателем (15), и передачи (21), соединяющей с возможностью взаимоблокировки ведомые колеса (16) и ведущее колесо (17) друг с другом; и полосовидной крышки (23), изогнутой вдоль горизонтального криволинейного участка (8) пути, имеющей проемы (24), чтобы обеспечить верхним частям окружных поверхностей ведомых колес (16) и ведущего колеса (17) возможность выступать вверх, и накрывающей передачу (21), которая может опираться на дугообразную несущую пластину (18), а ряд (14) внутренних колес без самостоятельного привода может состоять из колес (25) без самостоятельного привода, шарнирно опертых консольно через интервалы, более широкие, чем интервалы между колесами ряда (13) внешних ведущих колес, на одну сторону внутренней дугообразной несущей пластины (26), предусмотренной вдоль горизонтального криволинейного участка (8) пути; и направляющих (40a, 40b) на обеих - внутренней и внешней - сторонах, регулирующих ширину пути движения транспортируемого объекта на горизонтальном криволинейном участке (8) пути, которые могут соответственно опираться на обе - внутреннюю и внешнюю - дугообразные несущие пластины (18, 26) посредством кронштейнов (43a-44b). В соответствии с этой конфигурацией, криволинейный конвейер согласно настоящему изобретению можно воплотить просто и недорого с минимумом необходимых элементов.
[0008] Когда криволинейный конвейер согласно настоящему изобретению имеет вышеописанную конфигурацию, ведущее колесо (17) ряда (13) внешних ведущих колес можно крепить к выходному валу приводного электродвигателя (15) без шарнирной опоры на внешнюю дугообразную несущую пластину (18). В соответствии с этой конфигурацией, когда ведущее колесо, шарнирно опертое в некотором фиксированном положении внешней дугообразной несущей пластины, соединено с возможностью взаимоблокировки с приводным электродвигателем, обязательно подлежащим установке на каркасе, передача, предусматривающая также использование ремня или цепи из-за необходимости компенсировать вибрации в некотором относительном положении между ними, становится необязательной, и конструкцию можно упростить, так что ее воплощение окажется недорогим. Помимо этого, ведущее колесо соединено с возможностью взаимоблокировки с ведомыми колесами посредством передачи, и поэтому, даже если есть некоторые отклонения в положении установки приводного электродвигателя, эти отклонения можно компенсировать посредством передачи между ведущим колесом и ведомыми колесами, и никаких недостатков не возникает.
[0009] Ряд (13) внешних ведущих колес и ряд (14) внутренних колес без самостоятельного привода можно разделить на множество веерообразных областей, окружная длина которых охватывает выражаемую в целых числах относительную долю от 90 градусов (например, 45 градусов или 30 градусов), а электродвигатель (15), движущий колеса (16, 17) ряда (13) внешних ведущих колес в каждой из веерообразных областей, можно установить у каждой веерообразной области для формирования множества дугообразных узлов (12A-12D) конвейера, имеющих одинаковую конструкцию. Концевые части каждого дугообразного узла (12A-12D) конвейера можно снабдить соединяющими элементами (27a, 27b), которые соединяют концевые части смежных узлов конвейера. Соединяя множество дугообразных узлов (12A-12D) конвейера в окружном направлении посредством соединяющих элементов (27a, 27b), можно сформировать криволинейный конвейер (1), имеющий требуемую окружную длину (требуемый угловой диапазон). Криволинейный конвейер в общем случае имеет длину, соответствующую горизонтальному криволинейному участку пути, простирающемуся на 90 градусов или 180 градусов. Вместе с тем, в соответствии с вышеупомянутой конфигурацией, осуществляя просто соединение множества дугообразных узлов конвейера, имеющих окружную длину, например, 45 градусов или 30 градусов, друг с другом и придавая им форму дуги посредством соединяющих элементов, криволинейный конвейер, имеющий требуемую длину пути транспортировки (угловой диапазон транспортировки), можно сформировать, не вводя передачу движущей силы между соседними узлами дугообразного конвейера.
[0010] Кроме того, между горизонтальным криволинейным участком (8) пути и прямыми участками (2, 3) пути, соединенными с горизонтальным криволинейным участком (8) пути, можно расположить линейные узлы (10, 11) конвейера, каждый из которых включает в себя линейный ряд (28) внешних ведущих колес и линейный ряд (29) внутренних колес без самостоятельного привода, соединенные с рядом (13) внешних ведущих колес и рядом (14) внутренних колес без самостоятельного привода, а колеса (31) рядов (28) внешних ведущих колес линейных узлов (10, 11) конвейера можно сочленить с возможностью взаимоблокировки с колесами (16) ряда (13) внешних ведущих колес стороны подсоединенного горизонтального криволинейного участка (8) пути. В соответствии с этой конфигурацией, также можно ослабить влияние на положение, восприятие которого транспортируемым объектом, попадающим на горизонтальный криволинейный участок пути с прямого участка пути, переносится непосредственно на ряд внешних ведущих колес, находящихся ближе к центральной линии горизонтального криволинейного участка пути, и влияние на положение, восприятие которого транспортируемым объектом, покидающим горизонтальный криволинейный участок пути, чтобы попасть на прямой участок пути, переносится непосредственно на существующий прямой участок пути от верха ряда ведущих колес, находящихся ближе к центральной линии горизонтального участка пути, и можно реализовать плавный и не требующий усилий перенос транспортируемого объекта между горизонтальным криволинейным участком пути и прямыми участками пути.
[0011] Транспортируемый объект, продвигающийся по горизонтальному криволинейному участку пути, имеет внутреннюю продольную центральную часть, находящуюся в скользящем контакте с дугообразной внутренней боковой направляющей, и имеет угловые части обоих внешних продольных концов, находящиеся в скользящем контакте с дугообразной внешней боковой направляющей, вследствие чего и определяется положение (позиция). Чтобы позиционировать ряд ведущих колес горизонтального криволинейного участка пути как можно ближе к центральной линии транспортируемого объекта, считается желательным, чтобы внутренняя боковая направляющая не простиралась наружу (на сторону, где находится центр дуги), и только внешняя боковая направляющая простиралась в значительной степени наружу (на сторону, противоположную стороне, где находится центр дуги). Вместе с тем, когда обе - внутренняя и внешняя - боковые направляющие установлены таким образом, количество колес без самостоятельного привода ряда колес без самостоятельного привода, где они служат опорой обращенной внутрь конвейера стороне транспортируемого объекта, значительно сокращается, и возникает проблема, заключающаяся в том, что нагрузка, действующая на каждое колесо без самостоятельного привода, становится слишком большой. Чтобы решить эту проблему, необходимо, чтобы обе - внутренняя и внешняя - боковые направляющие (40a, 40b) были двухсторонне симметричными по отношению к дугообразной центральной линии (8a), чтобы ширина между ними была большей, чем ширина пути прямых участков (2, 3) пути, соединенных с горизонтальным криволинейным участком (8) пути. Транспортируемый объект, продвигающийся по горизонтальному криволинейному участку пути, воспринимает большую силу в направлении выскакивания наружу. Таким образом, чтобы снизить силу, отжимающую транспортируемый объект наружу, действующую на дугообразную внешнюю боковую направляющую, и сделать транспортируемый объект движущимся без усилий и плавно между обеими - внутренней и внешней - боковыми направляющими, задумана такая разработка, при осуществлении которой каждое колесо, входящее в ряд внешних ведущих колес, оказывается шарнирно опертым под небольшим углом в ориентации, в которой сторона переднего торца смещена на сторону, обращенную к центру дуги, по отношению к линии воображаемой дуги, проходящей через центральную точку - на виде в плане - каждого колеса ряда внешних ведущих колес.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
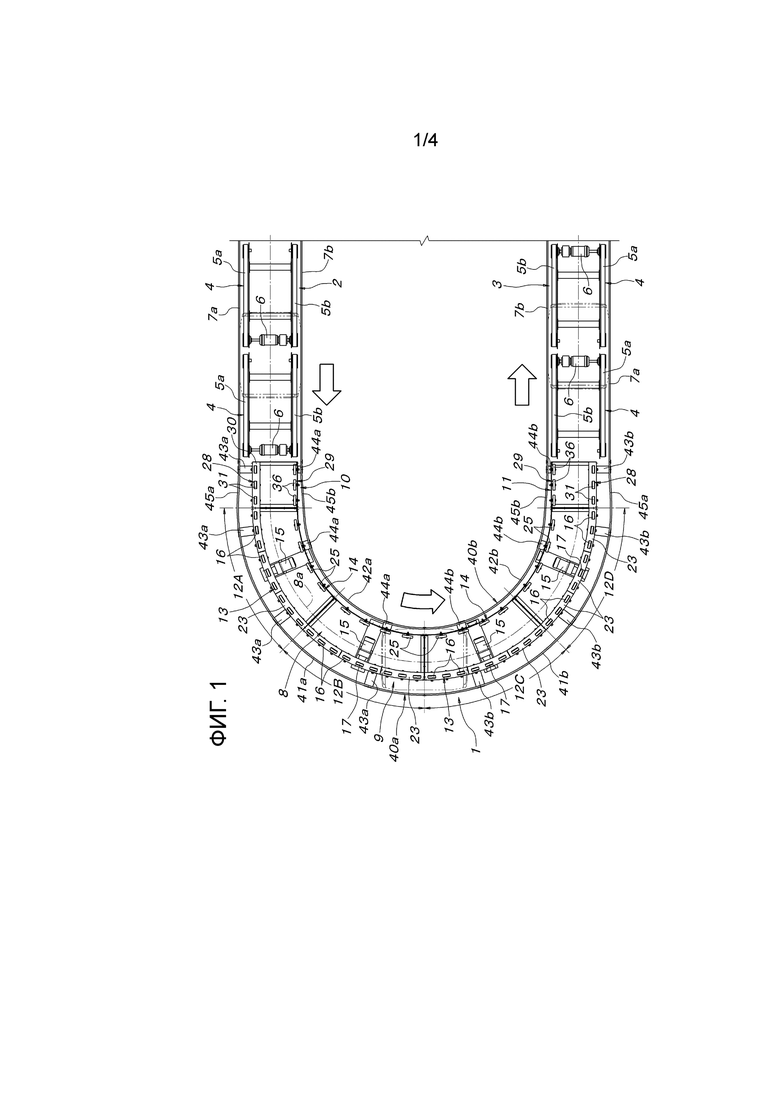
[0012] На фиг.1 представлен вид в плане, демонстрирующий состояние, в котором два параллельных прямых участка пути соединены криволинейным конвейером в соответствии с одним вариантом осуществления данного изобретения.
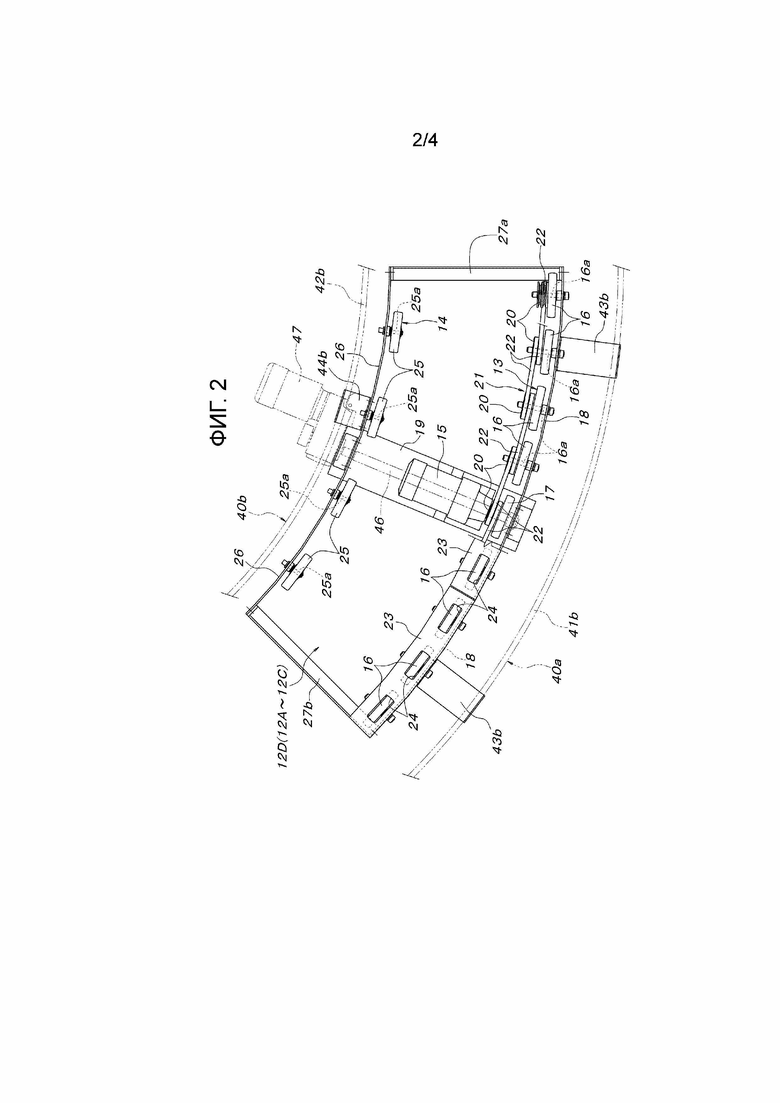
На фиг.2 представлен в увеличенном масштабе вид в плане с частичным вырезом, демонстрирующий один из дугообразных узлов конвейера, образующих криволинейный конвейер, показанный на фиг.1.
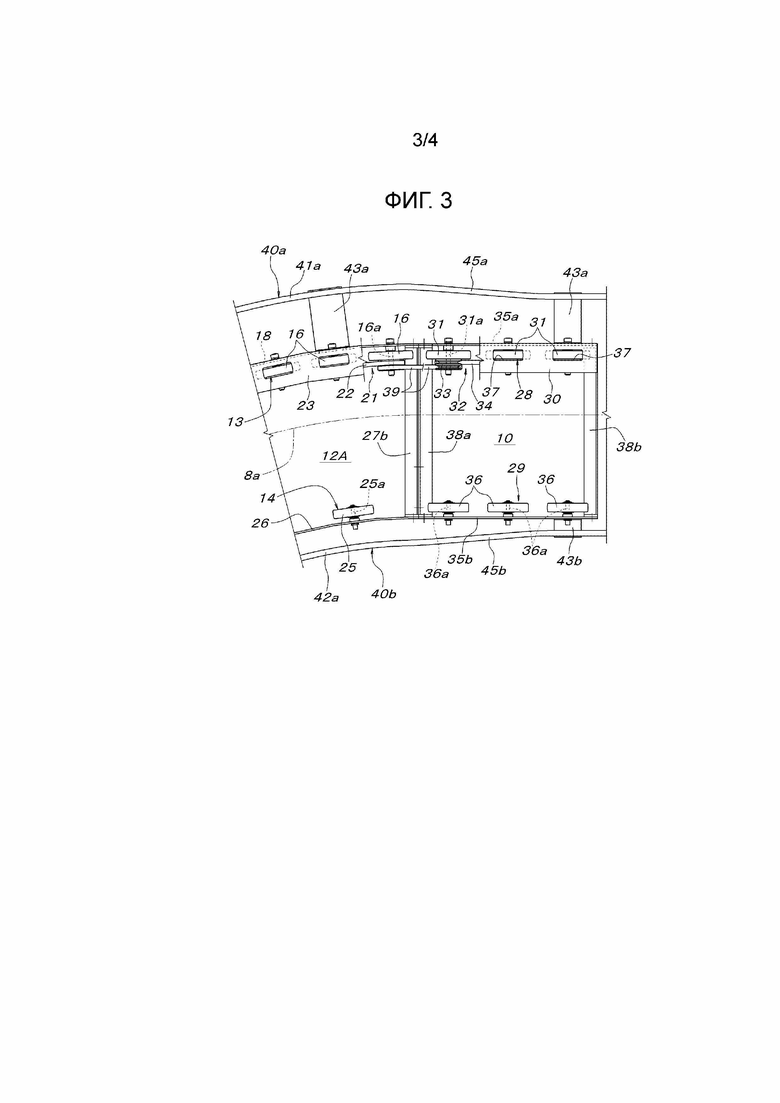
На фиг.3 представлен в увеличенном масштабе вид в плане с частичным вырезом, демонстрирующий часть согласно фиг.1.
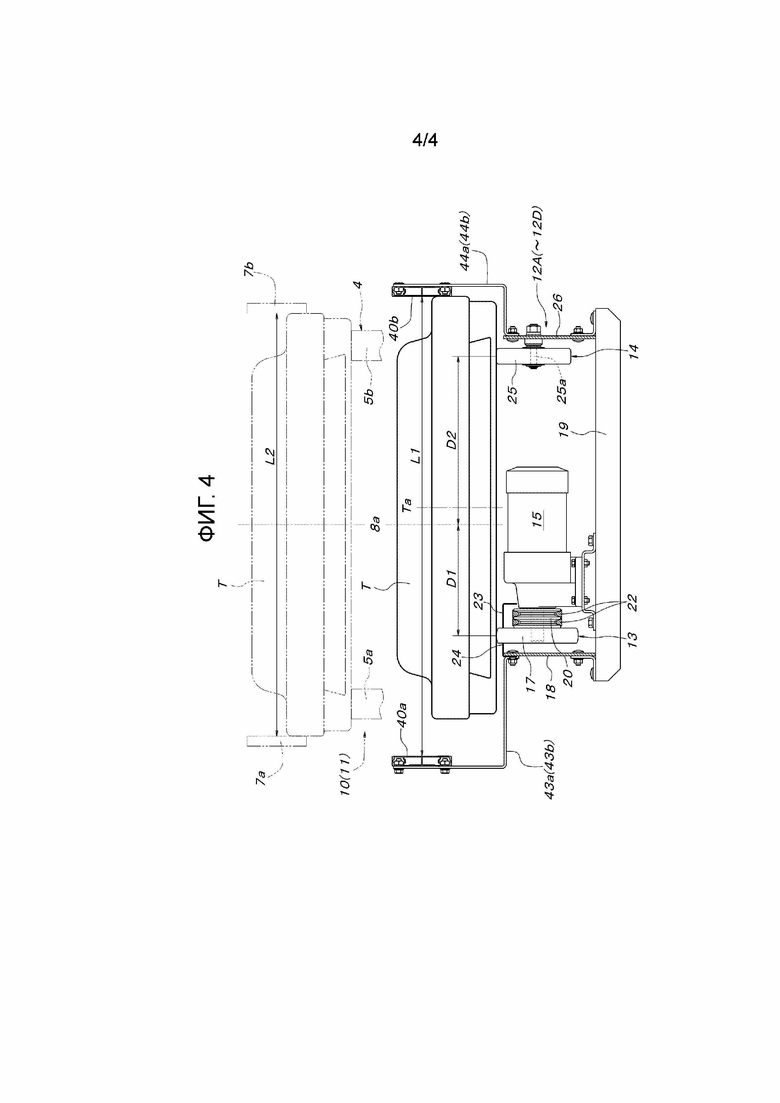
На фиг.4 представлено в увеличенном масштабе сечение на виде спереди криволинейного конвейера согласно фиг.1.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0013] На фиг.1, позиция 1 обозначает криволинейный конвейер в соответствии с настоящим изобретением, который соединяет прямой участок 2 пути на стороне впуска и прямой участок 3 пути на стороне выпуска, параллельные друг другу. Оба прямых участка 2, 3 пути образованы посредством соединения линейных узлов 4 ленточного конвейера, имеющих фиксированную длину. Каждый линейный узел 4 ленточного конвейера образован из двух лент 5a, 5b конвейера, расположенных параллельно, и одного приводного электродвигателя 6, расположенного в концевой части на стороне выпуска в направлении транспортировки, чтобы создать возможность синхронного привода обеих лент 5a, 5b конвейера. Рядом с каждым прямым участком 2, 3 пути расположена пара левой и правой линейных боковых направляющих 7a, 7b, регулирующих ширину пути движения поддона T в качестве транспортируемого объекта.
[0014] Криволинейный конвейер 1 состоит из остова 9, имеющего горизонтальный криволинейный участок 8 пути, имеющий длину дугообразного пути, соответствующую 180 градусов, линейный узел 10 конвейера на стороне впуска, соединяющий завершающий конец прямого участка 2 пути на стороне впуска и начальный конец горизонтального криволинейного участка 8 пути, линейный узел 11 конвейера на стороне выпуска, соединяющий завершающий конец горизонтального криволинейного участка 8 пути и начальный конец прямого участка 3 пути на стороне выпуска. Остов 9 криволинейного конвейера 1 состоит из четырех дугообразных узлов 12A-12D конвейера, каждый из которых отделен, образуя веерообразную область, имеющую окружную длину, соответствующую 45 градусов.
[0015] Каждый из дугообразных узлов 12A-12D конвейера имеет одну и ту же конструкцию и, как показано на фиг.2, включает в себя ряд 13 внешних ведущих колес и ряд 14 внутренних колес без самостоятельного привода, имеющий форму дуги, которая концентрична с дугообразной центральной линией 8а на горизонтальном криволинейном участке 8 пути, то есть, дугообразной центральной линией 8a, соединяющий центральные линии путей транспортировки линейного узла 10 конвейера на стороне впуска и линейного узла 11 конвейера на стороне выпуска (центральные линии, проходящие через центральные положения ширин между линейными боковыми направляющими 7a, 7b), и приводной электродвигатель 15 для ведущих колес ряда 13 внешних ведущих колес. Расстояние между рядом 13 внешних ведущих колес и дугообразной центральной линией 8a меньше, чем расстояние между дугообразной центральной линией 8a и рядом 14 внутренних колес без самостоятельного привода.
[0016] Ряд 13 внешних ведущих колес образован из множества ведомых колес 16, расположенных через одинаковые интервалы в окружном направлении, и одного ведущего колеса 17. Ведущее колесо 17 расположено в центре ряда 13 внешних ведущих колес. Другие - ведомые - колеса 16 консольно оперты посредством опорных валов 16a, оказываясь находящимися изнутри от внешней дугообразной несущей пластины 18, служащей в качестве внешнего несущего средства, которая концентрична с горизонтальным криволинейным участком 8 пути, через одинаковые интервалы в окружном направлении, включая ведущее колесо 17. Центральное ведущее колесо 17 не оперто шарнирно на внешнюю дугообразную несущую пластину 18, а соединено непосредственно с выходным валом приводного электродвигателя 15, установленного на раме 19. Опорные валы 16a соответственных ведомых колес 16 и выходной вал приводного электродвигателя 15, с которым непосредственно соединено ведущее колесо 17, расположены радиально по отношению к центру дуги дугообразной центральной линии 8a.
[0017] Каждое из ведомых колес 16 и одно ведущее колесо 17 имеют одну и ту же конструкцию. Как показано посредством ведомого колеса 16, изображенного в находящейся на самом конце части на стороне выхода в направлении транспортировки на фиг.2, на стороне, противоположной той стороне, где находится внешняя дугообразная несущая пластина 18, имеется двухручьевой шкив 20, который концентрично скреплен с каждым колесом 16, 17 как единое целое с ним. Таким образом, передача 21, соединяющая с возможностью взаимоблокировки все ведомые колеса 16 с ведущим колесом 17, непосредственно соединенным с приводным электродвигателем 15, состоит из двухручьевых шкивов 20, предусмотренных для всех колес 16, 17, и бесконечных ремней 22, натянутых попеременно внутри и снаружи между двухручьевыми шкивами 20 смежных колес, включая ведущее колесо 17.
[0018] Кроме того, рядом с рядом 13 внешних ведущих колес, как показано - частично - на фиг.2, находится полосовидная крышка 23, изогнутая вдоль горизонтального криволинейного участка 8 пути. Как показано на фиг.4, полосовидная крышка 23 имеет форму поперечного сечения портала с обеими - внутренней и внешней - сторонами формы дуги, снабженными изогнутыми вниз участками дугообразной боковой стенки, а в части дугообразной боковой стенки на внешней стороне полосовидная крышка 23 крепится к верхней концевой части внешней дугообразной несущей пластины 18. Полосовидная крышка 23 консольно выступает к верхней стороне ряда 13 внешних ведущих колес от внешней дугообразной несущей пластины 18, снабжена прямоугольными проемами 24, чтобы дать верхним частям окружных поверхностей каждого ведомого колеса 16 и ведущего колеса 17 возможность выступать вверх, и накрывает всю передачу 21 в целом, включая двухручьевые шкивы 20 соответственных колес 16, 17. Полосовидная крышка 23 может продолжаться по всей зоне, охватывающей 45 градусов, в каждом дугообразном узле 12A-12D конвейера. Вместе с тем, в иллюстрируемом примере длина дугообразного узла в направлении вдоль дугообразной центральной линии 8a после разделения упомянутой зоны составляет одну треть ее.
[0019] Ряд 14 внутренних колес без самостоятельного привода включает в себя множество колес 25 без самостоятельного привода, расположенных через одинаковые интервалы в окружном направлении вдоль дугообразной центральной линии 8a. Каждое колесо 25 без самостоятельного привода консольно оперто посредством опорного вала 25a снаружи внутренней дугообразной несущей пластины 26, служащей в качестве внутреннего несущего средства, которая концентрична с горизонтальным криволинейным участком 8 пути. Опорные валы 25a колес 25 без самостоятельного привода расположены радиально по отношению к центру дуги дугообразной центральной линии 8a. Интервал в окружном направлении между соответственными колесами 25 без самостоятельного привода шире, чем интервал между соответственными колесами 16, 17 ряда 13 внешних ведущих колес. Внешняя дугообразная несущая пластина 18, служащая опорой ряду 13 внешних ведущих колес, и внутренняя дугообразная несущая пластина 26, служащая опорой ряду 14 внутренних колес без самостоятельного привода, таковы, что промежуточные части их окружных длин закреплены на обеих - внутренней и внешней - концевых частях рамы 19, служащей опорой приводному электродвигателю 15, а обе концевые части окружных длин соединены и объединены в одно целое друг с другом соединяющими элементами 27a, 27b, имеющими L-образное поперечное сечение.
[0020] Линейный узел 10 конвейера на стороне впуска и линейный узел 11 конвейера на стороне выпуска имеют одну и ту же конструкцию и, как показано в линейном узле 10 конвейера на стороне впуска, изображенном на фиг.3, включают в себя ряд 28 внешних ведущих колес, ряд 29 внутренних колес без самостоятельного привода и полосовидную крышку 30, накрывающую ряд 28 внешних ведущих колес. Ряд 28 внешних ведущих колес находится в некотором положении, где соединяется с рядом 13 внешних ведущих колес соседнего дугообразного узла 12A, 12D конвейера, имеет ведомые колеса 31, консольно опертые на опорные валы 31а изнутри от внешней линейной несущей пластины 35a через такой же интервал, как между ведомыми колесами 16 ряда 13 внешних ведущих колес, и включает в себя передачу 32, соединяющую с возможностью взаимоблокировки соответственные ведомые колеса 31 друг с другом. Передача 32 состоит из двухручьевых шкивов 33, которые концентрично крепятся изнутри от соответственных ведомых колес 31, и бесконечных ремней 34, натянутых попеременно внутри и снаружи между двухручьевыми шкивами 33 смежных ведомых колес 31.
[0021] Ряд 29 внутренних колес без самостоятельного привода находится в некотором положении, где соединяется с рядом 14 внутренних колес без самостоятельного привода соседнего дугообразного узла 12A, 12D конвейера и имеет колеса 36 без самостоятельного привода, консольно опертые на опорные валы 36а изнутри от внутренней линейной несущей пластины 35b через такой же интервал, как между ведомыми колесами 31 ряда 28 внешних ведущих колес. Полосовидная крышка 30, накрывающая ряд 28 внешних ведущих колес, соответствует полосовидной крышке 23, предусмотренной для ряда 13 внешних ведущих колес, который выполнен линейным. Полосовидная крышка 30 включает в себя прямоугольные проемы 37, чтобы дать верхним частям окружных поверхностей соответственных ведомых колес 31 возможность выступать вверх, и накрывает целиком всю передачу 32, соединяющую с возможностью взаимоблокировки соответственные ведомые колеса 31. Оба конца внешней линейной несущей пластины 35a и оба конца внутренней линейной несущей пластины 35b соединены и объединены в одно целое друг с другом соединяющими элементами 38a, 38b, такими же, как соединяющий элемент 27a, 27b, на обоих концах каждого дугообразного узла 12A-12D конвейера.
[0022] Дугообразные узлы 12A-12D конвейера, имеющие вышеупомянутую конфигурацию, расположены на горизонтальном криволинейном участке 8 пути непрерывно друг с другом в форме дуги, а примыкающие друг к другу вертикальные части пластин соединяющих элементов 27a, 27b соответственных дугообразных узлов 12A-12D конвейера перекрываются друг с другом и соединены множеством болтов и гаек, образуя остов 9 криволинейного конвейера 1, снабженного горизонтальным криволинейным участком 8 пути, простирающимся на 180 градусов. Со стороной начального конца остова 9 криволинейного конвейера 1 соединяют линейный узел 10 конвейера на стороне впуска, а со стороной завершающего конца остова 9 соединяют линейный узел 11 конвейера на стороне выпуска, и тогда образуется весь криволинейный конвейер 1 целиком.
[0023] Теперь будет описано соединение между остовом 9 криволинейного конвейера 1 и линейным узлом 10 конвейера на стороне впуска и линейным узлом 11 конвейера на стороне выпуска. Соединяющий элемент 27a на стороне начального конца дугообразного узла 12А конвейера, находящегося на входе горизонтального криволинейного участка 8 пути, и соединяющий элемент 38b на стороне завершающего конца линейного узла 10 конвейера на стороне впуска, перекрываются в вертикальных частях пластин и соединены множеством болтов и гаек. В результате, оказываются соединенными ряд 13 внешних ведущих колес дугообразного узла 12А конвейера и ряд 28 внешних ведущих колес линейного узла 10 конвейера на стороне впуска, а также оказываются соединенными ряд 14 внутренних колес без самостоятельного привода дугообразного узла 12А конвейера и ряд 29 внутренних колес без самостоятельного привода линейного узла 10 конвейера на стороне впуска. Поскольку линейный узел 10 конвейера на стороне впуска не оснащен электродвигателем для привода ведомых колес 31 ряда 28 внешних ведущих колес, ведомое колесо 16, находящееся на завершающем конце ряда 13 внешних ведущих колес в дугообразном узле 12А конвейера и имеющее двухручьевой шкив 20, одна шкивная часть которого не занята, и ведомое колесо 31, находящееся на завершающем конце ряда 28 внешних ведущих колес в линейном узле 10 конвейера на стороне впуска и имеющее двухручьевой шкив 33, одна шкивная часть которого не занята, соединены с возможностью взаимоблокировки за счет натяжения бесконечного ремня 39 между незанятыми шкивными частями соответственных двухручьевых шкивов 20, 33.
[0024] Соединение между завершающим концом дугообразного узла 12D конвейера, находящееся на выходе горизонтального криволинейного участка 8 пути и начальным концом линейного узла 11 конвейера на стороне выпуска и соединение с возможностью взаимоблокировки посредством бесконечного ремня 39 между ведомыми колесами 16, 31 соответственных рядов 13, 28 внешних ведущих колес осуществляются так же, как описано выше. Как показано на фиг.2, в передаче 21 рядов 13 внешних ведущих колес всех дугообразных узлов 12A-12D конвейера имеется четное число (восемь) бесконечных ремней 22. Следовательно, обеспечивается состояние, в котором двухручьевой шкив 20 в положении начального конца на стороне впуска и двухручьевой шкив 20 в положении завершающего конца на стороне выпуска имеют незанятые шкивные части во внутреннем и внешнем противоположных положениях. С другой стороны, в линейном узле 10 конвейера на стороне впуска и линейном узле 11 конвейера на стороне выпуска, как показано на фиг.3, в передаче 32 ряда 28 внешних ведущих колес также имеется четное число бесконечных ремней 34 (два). Следовательно, обеспечивается состояние, в котором двухручьевые шкивы 33 на обоих концах имеют незанятые шкивные части во внутреннем и внешнем противоположных положениях. Поэтому тот факт, что ряд 13 внешних ведущих колес дугообразного узла 12А конвейера и ряд 28 внешних ведущих колес линейного узла 10 конвейера на стороне впуска можно сочленить с возможностью взаимоблокировки посредством бесконечных ремней 39, как описано выше, означает, что ряд 28 внешних ведущих колес линейного узла 11 конвейера на стороне выпуска, соответствующий имеющему такую же конструкцию, как в линейном узле 10 конвейера на стороне впуска, но перевернутую на 180 градусов, и ряд 13 внешних ведущих колес дугообразного узла 12D конвейера можно сочленить с возможностью взаимоблокировки друг с другом посредством бесконечного ремня 39.
[0025] Как показано на фиг.1, пара внутренней и внешней боковых направляющих 40a, 40b, регулирующих ширину пути в криволинейном конвейере 1, соединены с завершающими концами пары левой и правой линейных боковых направляющих 7a, 7b, предусмотренных для прямого участка 2 пути на стороне впуска, и начальными концами пары левой и правой линейных боковых направляющих 7a, 7b, предусмотренных для прямого участка 3 пути на стороне выпуска. Каждая из пары внутренней и внешней боковых направляющих 40a, 40b состоит из двух узлов 41a, 41b и 42a, 42b боковых направляющих, соединенных в центральном положении в направлении длины горизонтального криволинейного участка 8 пути, то есть, в месте соединения между дугообразными узлами 12B, 12C конвейера. Соответственные узлы 41a-42b боковых направляющих оперты на внешнюю дугообразную несущую пластину 18 и внешнюю линейную несущую пластину 35a, а также внутреннюю дугообразную несущую пластину 26 и внутреннюю линейную несущую пластину 35b посредством множества кронштейнов 43a, 43b и 44a, 44b, соответственно. Как показано на фиг.4, из боковых направляющих 40a, 40b, дугообразные области вдоль горизонтального криволинейного участка 8 пути имеют конфигурацию, при которой формы концентричных дуг отстоят на одинаковое расстояние от обеих - левой и правой - сторон по отношению к дугообразной центральной линии 8a. Конфигурация ширины L1 пути между боковыми направляющими 40a, 40b на горизонтальном криволинейном участке 8 пути такова, что она больше, чем ширина L2 пути между линейными боковыми направляющими 7a, 7b на прямом участке 2, 3 пути, так что прямоугольный поддон T, длинная сторона которого вертикальна (что показано виртуальными линиями на фиг.1), имеющий длину, которая больше ширины на виде в плане, может двигаться по горизонтальному криволинейному участку 8 пути. В частности, ширину L1 пути между боковыми направляющими 40a, 40b в дугообразных областях вдоль дугообразных узлов 12A-12D конвейера задают так, что центральное положение в направлении длины внутренней стороны поддона T, движущегося по горизонтальному криволинейному участку 8 пути, примыкает к внутренней боковой направляющей 40b, а обе - передняя и задняя - концевые части внешней стороны поддона T примыкают к внешней боковой направляющей 40a.
[0026] Соответственно, что касается обеих - внутренней и внешней - боковых направляющих 40a, 40b криволинейного конвейера 1, то боковые направляющие 40a, 40b в линейных областях, где расположены линейный узел 10 конвейера на стороне впуска и линейный узел 11 конвейера на стороне выпуска, включают в себя наклонные части 45a, 45b боковых направляющих, протяженность которых постепенно изменяется между концевыми частями, где ширина пути мала, соединенными с линейными боковыми направляющими 7a, 7b, регулирующими ширину пути прямых участков 2, 3 пути, и концевыми частями в дугообразных областях, где ширина пути велика, вдоль дугообразных узлов 12A-12D конвейера.
[0027] В криволинейном конвейере 1 согласно настоящему изобретению, имеющем вышеупомянутую конфигурацию, поддон T, который транспортировали линейные узлы 4 ленточного конвейера прямого участка 2 пути на стороне впуска, посылается в линейный узел 10 конвейера на стороне впуска, находящийся на стороне входа криволинейного конвейера 1, и высылается на прямой участок 3 пути на стороне выпуска из дугообразных узлов 12A-12D конвейера посредством линейного узла 11 конвейера на стороне выпуска за счет непрерывной работы приводного электродвигателя 15 каждого дугообразного узла 12A-12D конвейера. Поддон T, которому сообщают движение на криволинейном конвейере 1, оперт на обращенной наружу стороне на приводимые во вращение ведомые колеса 31, 16, 31 рядов 28, 13, 28 внешних ведущих колес и ведущие колеса 17 и оперт на обращенной внутрь конвейера стороне на колеса 36, 25, 36 без самостоятельного привода рядов 29, 14, 29 внутренних колес без самостоятельного привода. Поддон T движется по горизонтальному криволинейному участку 8 пути, а в процессе движения положение не регулируется обеими - внутренней и внешней - боковыми направляющими 40a, 40b.
[0028] Поддон T, движущийся по горизонтальному криволинейному участку 8 пути, движется вперед посредством тяги, прикладываемой горизонтально к обращенной наружу стороне от приводимых во вращение ведомых колес 16 ряда 13 внешних ведущих колес и ведущих колес 17. Как показано на фиг.4, расстояние D1 между рядом 13 внешних ведущих колес и дугообразной центральной линией 8a на горизонтальном криволинейном участке 8 пути меньше, чем расстояние D2 между рядом 14 внутренних колес без самостоятельного привода и дугообразной центральной линией 8a. В результате, расстояние, на котором ведомые колеса 16 и ведущие колеса 17 рядов 13 внешних ведущих колес осуществляют привод поддона T вдоль горизонтального криволинейного участка 8 пути, увеличивается по сравнению со случаем, где положение ряда 13 внешних ведущих колес находится в двусторонне симметричном положении ряда 14 внутренних колес без самостоятельного привода по отношению к центральной линии Ta поддона, проходящей через центр в направлении ширины - влево-вправо - поддона T. То есть, можно предотвратить ту степень, в которой скорость движения поддона T на горизонтальном криволинейном участке 8 пути становится меньше, чем скорость движения, когда поддон T движется по прямому участку 2 пути на стороне впуска. Соответственно, можно предотвратить становление интервала в направлении движения поддона T на прямом участке 2 пути на стороне впуска необоснованно узким во время движения по горизонтальному криволинейному участку 8 пути.
[0029] Когда линейный узел 10 конвейера на стороне впуска не предусматривается, а поддон T посылают в дугообразный узел 12А конвейера остова 9 криволинейного конвейера 1 непосредственно с прямого участка 2 пути на стороне впуска, даже если передняя половина поддона T попадает в дугообразный узел 12А конвейера и подвергается влиянию, оказываемому рядом 13 внешних ведущих колес вдоль горизонтального криволинейного участка 8 пути, задняя половина поддона T находится в состоянии восприятия большой тяги в направлении прямо вперед от линейного узла 4 ленточного конвейера прямого участка 2 пути на стороне впуска. Таким образом, поддон T не может плавно приобрести ориентацию вдоль горизонтального криволинейного участка 8 пути, а прижимается к внешней боковой направляющей 40a, и в некоторых случаях остановить поддон T невозможно. Вместе с тем, благодаря наличию линейного узла 10 конвейера на стороне впуска, когда передняя половина поддона T попадает в дугообразный узел 12A конвейера, задняя половина поддона T находится в состоянии восприятия тяги, прикладываемой рядом 28 внешних ведущих колес, в некотором положении, смещенном к центральной линии линейного узла 10 конвейера на стороне впуска, и эта тяга меньше, чем тяга в направлении прямо вперед, воспринимаемая от линейного узла 4 ленточного конвейера, и поддон T склонен поворачиваться в криволинейном направлении следующего дугообразного узла 12A конвейера. Поэтому вышеописанный недостаток не вызывается. Кроме того, благодаря наличию наклонных частей 45a, 45b боковых направляющих на стороне начального конца боковых направляющих 40a, 40b, становится невозможным воспрепятствовать движению поворота к направлению кривизны дугообразного узла 12А конвейера в тот момент, когда поддон T находится в некотором положении охвата с двух сторон линейным узлом 10 конвейера на стороне впуска и дугообразным узлом 12A конвейера.
[0030] Поддон T, который завершил движение по горизонтальному криволинейному участку 8 пути, посылают на прямой участок 3 пути на стороне выпуска после поворота, по существу, к ориентации прямо вперед посредством линейного узла 11 конвейера на стороне выпуска. Таким образом, поддон T можно плавно послать на прямой участок 3 пути на стороне выпуска - по сравнению со случаем, в котором передняя половина поддона T воспринимает большую тягу в направлении прямо вперед линейного узла 4 ленточного конвейера линейного узла 11 конвейера на стороне выпуска в состоянии, в котором задняя половина поддона T по-прежнему подвергается влиянию, оказываемому рядом 13 внешних ведущих колес вдоль горизонтального криволинейного участка 8 пути дугообразного узла 12D конвейера, то есть, в состоянии, в котором поддон T не повернут в направлении прямо вперед, как в случае, в котором линейный узел 11 конвейера на стороне выпуска отсутствует. Кроме того, в ходе этого процесса происходит коррекция положения поддона T по направлению к ориентации прямо вперед с обеих - левой и правой - сторон наклонными частями 45a, 45b боковых направляющих на стороне завершающего конца боковых направляющих 40a, 40b, а также осуществляется центрирование. В этой связи отметим также, что поддон T плавно высылается на прямой участок 3 пути на стороне выпуска.
[0031] В вышеизложенном варианте осуществления ведущее колесо 17 ряда 13 внешних ведущих колес каждого дугообразного узла 12A-12D конвейера крепится непосредственно к выходному валу приводного электродвигателя 15, установленного на раме 19. Вместе с тем, в соответствии с условиями, которые показаны виртуальными линиями на фиг.2, возможно также крепление ведущего колеса 17 к внешней концевой части приводного вала 46, опертого так, что пересекает внешнюю дугообразную несущую пластину 18 и внутреннюю дугообразную несущую пластину 26, а приводной электродвигатель 47, выходной вал которого соединен с возможностью взаимоблокировки с внутренним концом приводного вала 46 может быть установлен снаружи от внутренней дугообразной несущей пластины 26 (на стороне, где находится центр дуги горизонтального криволинейного участка 8 пути). Кроме того, внешняя дугообразная несущая пластина 18, служащая шарнирной опорой ведомым колесам 16, расположенным консольно на одной стороне через надлежащие интервалы, используется как внешнее несущее средство, а внутренняя дугообразная несущая пластина 26, служащая шарнирной опорой колесам 25 без самостоятельного привода, расположенным консольно через надлежащие интервалы, используется как внутреннее несущее средство. Вместе с тем, их конфигурация упомянутым вариантом осуществления не ограничивается. Например, возможно также внешнее несущее средством или внутреннее несущее средство, в котором применяются независимые опоры, установленные вдоль горизонтального криволинейного участка 8 пути на основании количества колес, и на каждую опору шарнирно опирается ведомое колесо 16 или ведущее колесо 17, либо колесо 25 без самостоятельного привода. Кроме того, даже когда используются внешняя дугообразная несущая пластина 18 и внутренняя дугообразная несущая пластина 26, эти несущие пластины могут быть такими, что полосовидные пластины будут изогнутыми с приданием формы дуги или изогнутыми с приданием формы многоугольника. В этом случае несущим пластинам также можно придать конфигурацию посредством одной-единственной полосовидной пластины, продолжающейся по всей длине горизонтального криволинейного участка 8 пути, или можно придать конфигурацию, обуславливающую их разделение с образованием множества полосовидных пластин.
ПРОМЫШЛЕННАЯ ПРИМЕНИМОСТЬ
[0032] Криволинейный конвейер согласно настоящему изобретению можно использовать как средство транспортировки поддона на горизонтальном криволинейном участке пути на пути транспортировки, для ручных манипуляций поддонами T, имеющими прямоугольную форму, длинные стороны которых вертикальны, и имеющими фиксированные ширину и длину.
ПЕРЕЧЕНЬ ССЫЛОЧНЫХ ПОЗИЦИЙ
[0033] 1 Криволинейный конвейер
2 Прямой участок пути на стороне впуска
3 Прямой участок пути на стороне выпуска
4 Линейный узел ленточного конвейера
7a, 7b Линейная боковая направляющая
8 Горизонтальный криволинейный участок пути
8 Дугообразная центральная линия
9 Остов криволинейного конвейера
10 Линейный узел конвейера на стороне впуска
11 Линейный узел конвейера на стороне выпуска
12A-12D Дугообразный узел конвейера
13, 28 Ряд внешних ведущих колес
14, 29 Ряд внутренних колес без самостоятельного привода
15, 47 Приводной электродвигатель
16, 31 Ведомое колесо
17 Ведущее колесо
18 Внешняя дугообразная несущая пластина
19 Рама
20, 33 Двухручьевой шкив
21, 32 Передача
22, 34, 39 Бесконечный ремень
23, 30 Полосовидная крышка
24, 37 Проем
25, 36 Колесо без самостоятельного привода
26 Внутренняя дугообразная несущая пластина
27a, 27b, 38a, 38b Соединяющий элемент
31 Ведомое колесо
35 Внешняя линейная несущая пластина
35b Внутренняя линейная несущая пластина
40a, 40b Боковая направляющая
41a-42b Узел боковой направляющей
43a-44b Кронштейн
45a, 45b Наклонная часть боковой направляющей
T Поддон
Tа Центральная линия поддона
L1 Ширина пути между боковыми направляющими 40a, 40b
L2 Ширина пути между линейными боковыми направляющими 7a, 7b
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОТКЛОНЕНИЯ/ОБЪЕДИНЕНИЯ ДЛЯ ТРАНСПОРТНОГО ОБОРУДОВАНИЯ | 2019 |
|
RU2768075C1 |
| УСТАНОВКА ДЛЯ ТРАНСПОРТИРОВКИ И СОРТИРОВКИ | 2019 |
|
RU2768099C1 |
| УСТАНОВКА ДЛЯ ТРАНСПОРТИРОВКИ И СОРТИРОВКИ | 2019 |
|
RU2760052C1 |
| КОНВЕЙЕР | 2021 |
|
RU2769558C1 |
| УСТАНОВКА ДЛЯ ТРАНСПОРТИРОВКИ И СОРТИРОВКИ | 2019 |
|
RU2767089C1 |
| ТРАНСПОРТЕР С ТРУБЧАТОЙ ЛЕНТОЙ | 1991 |
|
RU2023641C1 |
| КОНВЕЙЕРНОЕ УСТРОЙСТВО С ИСПОЛЬЗОВАНИЕМ КОНВЕЙЕРНОГО ПОДВИЖНОГО ЭЛЕМЕНТА | 2011 |
|
RU2529933C2 |
| УСТРОЙСТВО ДЛЯ НАПОЛНЕНИЯ ФАРМАЦЕВТИЧЕСКИХ ЕМКОСТЕЙ (ВАРИАНТЫ) | 1995 |
|
RU2140383C1 |
| ЛЕНТОЧНОЕ КОНВЕЙЕРНОЕ УСТРОЙСТВО С РЕГУЛИРУЕМЫМ ВЕДОМЫМ ШКИВОМ | 2008 |
|
RU2415066C1 |
| АГРЕГАТ ДЛЯ РАЗГРУЗКИ ПЛОДОВ И ОВОЩЕЙ ИЗ ЯЩИКОВ, ТРАНСПОРТИРУЕМЫХ НА ПОДДОНАХ | 1963 |
|
SU215793A1 |
Криволинейный конвейер 1, установленный на горизонтальном криволинейном участке 8 пути на пути транспортировки, снабжен: рядом 14 внутренних колес без самостоятельного привода, расположенным вдоль горизонтального криволинейного участка 8 пути так, что обращен внутрь, где находится центр дуги, по отношению к дугообразной центральной линии 8а, проходящей через центр ширины пути горизонтального криволинейного участка 8 пути; и рядом 13 внешних ведущих колес, расположенным вдоль горизонтального криволинейного участка 8 пути так, что обращен наружу, на стороне, противоположной той, где находится центр дуги, по отношению к дугообразной центральной линии 8а. Расстояние от дугообразной центральной линии 8а до ряда внешних ведущих колес меньше, чем расстояние от дугообразной центральной линии 8а до ряда 14 внутренних колес без самостоятельного привода. Использование конвейера позволяет избежать нежелательных эффектов, таких, как проскальзывание, износ и нестабильное поведение транспортируемого объекта. 6 з.п. ф-лы, 4 ил.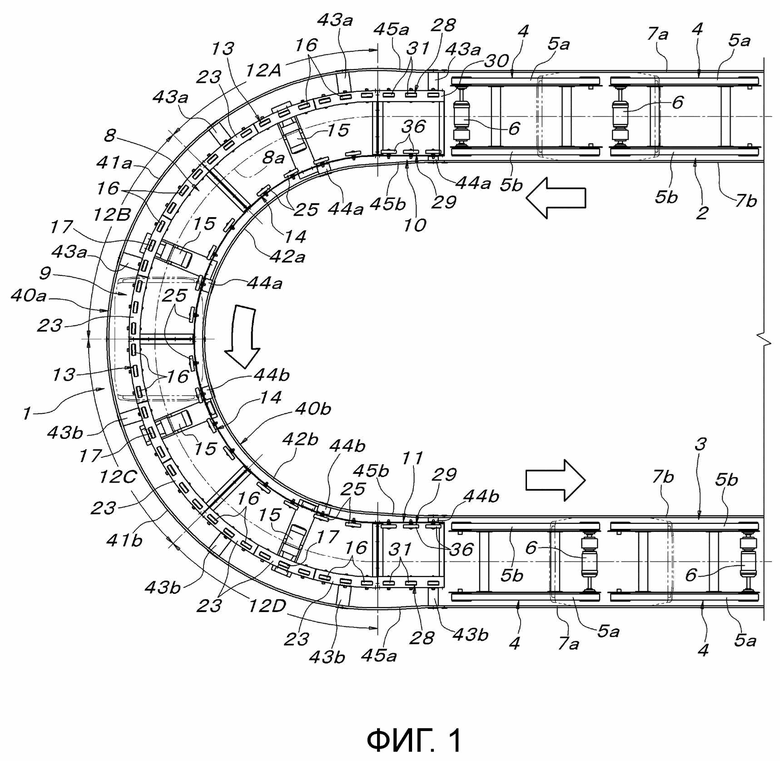
1. Криволинейный конвейер (1), установленный на горизонтальном криволинейном участке (8) пути на пути транспортировки, включающий в себя ряд (14) внутренних колес без самостоятельного привода, расположенный вдоль горизонтального криволинейного участка (8) пути на внутренней стороне, где находится центр дуги, по отношению к дугообразной центральной линии (8а), проходящей через центр ширины (L2) пути горизонтального криволинейного участка (8) пути, и ряд (13) внешних ведущих колес, расположенный вдоль горизонтального криволинейного участка (8) пути на внешней стороне, которая противоположна стороне, где находится центр дуги, по отношению к дугообразной центральной линии (8а), при этом расстояние (D1) от дугообразной центральной линии (8а) до ряда внешних ведущих колес короче, чем расстояние (D2) от дугообразной центральной линии (8а) до ряда (14) внутренних колес без самостоятельного привода.
2. Криволинейный конвейер по п.1, в котором ряд (13) внешних ведущих колес состоит из ведомых колес (16), шарнирно опертых через надлежащие интервалы на внешнее несущее средство (18), предусмотренное вдоль горизонтального криволинейного участка (8) пути, ведущего колеса (17), соединенного с возможностью взаимоблокировки с приводным электродвигателем (15), и передачи (21), соединяющей с возможностью взаимоблокировки ведомые колеса (16) и ведущее колесо (17) друг с другом, а ряд (14) внутренних колес без самостоятельного привода состоит из колес (25) без самостоятельного привода, шарнирно опертых через интервалы, более широкие, чем интервалы между колесами ряда (13) внешних ведущих колес, на внутреннее несущее средство (26), предусмотренное вдоль горизонтального криволинейного участка пути, и при этом обе - внутренняя и внешняя - боковые направляющие (40а, 40b), регулирующие ширину пути движения транспортируемого объекта на горизонтальном криволинейном участке (8) пути, выполнены двухсторонне симметричными по отношению к дугообразной центральной линии, проходящей через центр ширины пути горизонтального криволинейного участка (8) пути.
3. Криволинейный конвейер по п.1 или 2, в котором ряд (13) внешних ведущих колес состоит из ведомых колес (16), шарнирно опертых консольно через надлежащие интервалы на одну сторону внешней дугообразной несущей пластины (18), предусмотренной вдоль горизонтального криволинейного участка (8) пути, ведущего колеса (17), соединенного с возможностью взаимоблокировки с приводным электродвигателем (15), и передачи (21), соединяющей с возможностью взаимоблокировки ведомые колеса (16) и ведущее колесо (17) друг с другом, и полосовидной крышки (23), изогнутой вдоль горизонтального криволинейного участка (8) пути, имеющей проемы (24), чтобы обеспечить верхним частям окружных поверхностей ведомых колес (16) и ведущего колеса (17) возможность выступать вверх, и накрывающей передачу (21), которая опирается на дугообразную несущую пластину (18), а ряд (14) внутренних колес без самостоятельного привода состоит из колес (25) без самостоятельного привода, шарнирно опертых консольно через интервалы, более широкие, чем интервалы между колесами ряда (13) внешних ведущих колес, на одну сторону внутренней дугообразной несущей пластины (26), предусмотренной вдоль горизонтального криволинейного участка (8) пути; и двух - внутренней и внешней - боковых направляющих (40а, 40b), регулирующих ширину пути движения транспортируемого объекта на горизонтальном криволинейном участке (8) пути, соответственно опирающихся на обе - внутреннюю и внешнюю - дугообразные несущие пластины (18, 26) посредством кронштейнов (43а-44b).
4. Криволинейный конвейер по п.3, в котором ведущее колесо (17) ряда (13) внешних ведущих колес не оперто шарнирно на внешнюю дугообразную несущую пластину (18), а прикреплено к выходному валу приводного электродвигателя (15).
5. Криволинейный конвейер по любому из пп.1-4, в котором ряд (13) внешних ведущих колес и ряд (14) внутренних колес без самостоятельного привода разделены на множество веерообразных областей, окружная длина которых охватывает выражаемую в целых числах относительную долю от 90 градусов, для формирования множества дугообразных узлов (12А-12D) конвейера, имеющих одинаковую конструкцию, а электродвигатель (15), движущий колеса (16, 17) ряда (13) внешних ведущих колес в каждом из дугообразных узлов (12А-12D) конвейера, установлен у каждой веерообразной области, и концевые части каждого дугообразного узла (12А-12D) конвейера снабжены соединяющими элементами (27а, 27b), которые соединяют концевые части смежных узлов конвейера, а криволинейный конвейер (1), имеющий требуемую окружную длину, сформирован посредством соединения множества дугообразных узлов (12А-12D) конвейера в окружном направлении посредством соединяющих элементов (27а, 27b).
6. Криволинейный конвейер по любому из пп.1-5, в котором между горизонтальным криволинейным участком (8) пути и прямыми участками (2, 3) пути, соединенными с горизонтальным криволинейным участком (8) пути, расположены линейные узлы (10, 11) конвейера, каждый из которых включает в себя линейный ряд (29) внешних колес без самостоятельного привода и линейный ряд (28) внешних ведущих колес, соединенные с рядом (14) внутренних колес без самостоятельного привода и рядом (13) внешних ведущих колес, а колеса (31) рядов (28) внешних ведущих колес линейных узлов (28) конвейера соединены с возможностью взаимоблокировки с колесами (16) ряда (13) внешних ведущих колес стороны подсоединенного горизонтального криволинейного участка (8) пути.
7. Криволинейный конвейер по любому из пп.2-6, в котором обе - внутренняя и внешняя - боковые направляющие (40а, 40b) двухсторонне симметричны по отношению к дугообразной центральной линии (8а), проходящей через центр ширины пути горизонтального криволинейного участка (8) пути, чтобы ширина между ними была большей, чем ширина пути прямых участков (2, 3) пути, соединенных с горизонтальным криволинейным участком (8) пути.
| Рольганг для транспортирования штучных грузов | 1982 |
|
SU1150182A1 |
| DE 10053888 A1, 16.08.2001 | |||
| СРЕДСТВО ДЛЯ ПЕРЕДВИЖЕНИЯ "ПАРАДОКС" | 1999 |
|
RU2150984C1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |

