Стенд для испытаний невращающихся элементов автомата перекоса вертолета относится к испытательному оборудованию, а именно к стендам для усталостных (типовых, ресурсных, сертификационных, периодических) испытаний образцов невращающихся элементов автомата перекоса вертолета на воздействие динамических и статических нагрузок характерных для полета.
Известен стенд для усталостных испытаний (патент CN 107436237, G01M 13/02, публ. 05.12.2017), в котором осуществляют моделирование вращающейся нагрузки на вал несущего винта вертолета с помощью четырех гидроприводов. Конструкция стенда включает раму, загрузочный диск, имитатор подшипника и гидроприводы, соединенные с рамой. В процессе работы стенда происходит имитация нагрузки, возникающей при вращении несущего винта.
Известен стенд (SU 184497, В64С 27/54, публ. 1966.07.21), предназначенный одновременно для динамических и ресурсных испытаний автоматов перекосов вертолетов, который воспроизводит спектр нагрузок состоящий из пяти гармоник. Стенд содержит закрепленный на раме, стендовый автомат перекоса, вращающаяся тарелка которого соединена регулируемыми шарнирными тягами с концами торсионов, которые установлены на вращающейся, синхронно с тарелкой, траверсе. Испытуемый образец закреплен тягами поворота лопасти к противоположным концам торсионов. Нагрузки по 5 гармоникам создаются внешними воздействиями на рычаги управления стендового и испытуемого автоматов перекосов.
Недостатком известного устройства является необходимость применения вертолетного автомата перекоса, аналогичного испытуемому, в качестве стендового узла. При испытаниях расходуется его ресурс, что требует больших затрат обусловленных необходимостью частой замены стендового автомата перекоса. Стенд предназначен для проведения полного комплекса усталостных и ресурсных испытаний, т.е. на стенде осуществлена попытка имитации реального полета. Но поскольку запись полетных нагрузок затруднена из-за помех, возникающих при передаче сигналов с вращающихся узлов, то и воспроизведение этих нагрузок не может быть точным. Более достоверными являются значения механических напряжений полученных на деталях невращащихся элементов автомата перекоса. Комплексные испытания по пяти параметрам имеют большую погрешность воспроизведения и трудоемки при применении ручной настройки стенда. Динамические нагрузки, приводящие к усталостным повреждениям деталей и узлов автомата перекоса, воспроизводятся на специализированных стендах для усталостных испытаний упомянутых узлов, а одновременное воспроизведение износного воздействия на шарниры и подшипники автомата прекоса считается необязательным.
Известен стенд для ресурсных испытаний автоматов перекоса несущих винтов вертолетов (SU 157136, МПК B64F 5/00, G01M 19/00), включающий раму со смонтированными на ней ведущим валом, планетарным редуктором и винтовыми механизмами, с целью нагружения испытуемых автоматов перекоса переменными усилиями, близкими к эксплуатационным, он снабжен механизмом, выполненным в виде эксцентриков, вращающихся от сателлитов планетарного редуктора с оборотами, кратными числу оборотов тарелки автомата перекоса, и передающих усилия с частотой второй и третьей гармоник несущего винта через систему дифференциальных рычагов и качалок на подпружиненные штоки, нагружающие автомат перекоса через тяги поворота лопастей.
Основным недостатком данной конструкции является громоздкость, сложность устройства, дороговизна изготовления и обслуживания механизма создания нагрузок приходящих на автомат перекоса. Причиной перечисленных недостатков является одновременное проведение испытаний автомата перекоса на усталость и износ, что требует размещения нагружающих устройств на вращающейся части стенда. По этой причине настройка стенда на режимы испытаний трудоемка. Автоматизация настройки режимов и поддержания параметров испытаний при такой конструкции затруднена, т.к. передача и получение сигналов связи с элементами системы измерения и управления, которые расположены на вращающейся части должны осуществляться с помощью дополнительных устройств. Последние вносят ограничения по количеству и искажениям электрических сигналов, или по быстродействию измерительных устройств.
Техническая проблема, не решенная в описанных стендах, решение которой обеспечивается заявляемым изобретением, заключается в создании устройства в котором реализован отказ от одновременного проведения усталостных и износных испытаний и имеется возможность использовать для имитации циклических нагрузок, приходящих на невращающиеся элементы автомата перекоса, вместо сложного по конструкции вращающегося нагружающего устройства, компактное и относительно не дорогое оборудование, позволяющее производить настройку и поддержание параметров нагружения при испытаниях в автоматическом режиме;
- это позволяет использовать для воспроизведения циклических нагрузок на невращающися элементы автомата перекоса относительно не дорогие силовозбудители, взаимозаменяемые с применяемыми на других стендах;
- позволяет с высокой точностью воспроизводить нагрузки характерные для различных режимов полета;
- упрощает настройку стенда в соответствии с параметрами программы испытаний, в которой отражены эквивалентные полетным режимам, значения нагрузок приходящих на невращающиеся элементы автомата перекоса;
- применение описанного подхода к износным испытаниям позволяет использовать для создания и поддержания нагрузок на невращающиеся элементы автомата перекоса автоматическую систему управления. Это позволяет автоматизировать переходы между режимами с различными нагрузками, таким образом проводить испытания непрерывно круглые сутки, с автоматической защитой от выхода нагрузок за значения установленные программой испытаний. Применение автоматической системы управления уменьшает календарное время и трудоемкость проведения испытания, повышает надежность хранения информации о параметрах испытаний;
- предлагаемое устройство не содержит сложных, в том числе авиационных агрегатов, которые расходуют свой ресурс в ходе проведения испытаний. Последнее, повышает надежность стенда, увеличивает его межремонтный ресурс.
Технический результат применения изобретения заключается в возможности воспроизведения нагрузок на невращающиеся элементы автомата перекоса характерные для различных режимов полета с помощью не дорогих силовозбудителей, взаимозаменяемых с применяемыми на других стендах; повышении точности задания нагрузок; а также достигается снижение трудоемкости испытаний и упрощение настройки стенда.
Технический результат достигается за счет того, что в стенде для испытаний невращающихся элементов автомата перекоса вертолета, содержащем раму 1 с закрепленными на ней нагружающим устройствами, а также средства измерения, в соответствии с заявляемым изобретением, -нагружающие устройства, шарнирно закрепленные на основании 2 рамы 1, выполнены в виде гидравлических силовозбудителей 3, 4, 5, 6 и 7, каждый из которых снабжен датчиком силы, на которых закреплены шарнирные подшипники 11, соединенные с имитатором вращающейся тарелки 9 автомата перекоса 5, при этом один силовозбудитель 7, через шарнирный подшипник 28, закрепленный на датчике силы 13, соединен с рычагом 26 общего шага испытуемого автомата перекоса 14, рычаги продольного 36 и поперечного 37 управления шарнирно соединены тягами 38 и 39 с тумбой 3 рамы 1, а имитатор вращающейся тарелки 9 шарнирно соединен тягой 48 с реактивной стойкой 4 рамы 1, в тягах 17 и 18 смонтированы датчики силы 20 и21.
При этом стенд оснащен электронной системой управления и измерения.
Применение в конструкции стенда имитатора вращающейся тарелки 12 автомата перекоса, шарнирно соединенной со штоками силовозбудителей 3, 4, 5, 6, позволяет отказаться от вращающейся части стенда и создавать циклические нагрузки на невращаюшиеся элементы автомата перекоса.
Использование датчиков силы 8, 9, 10, 11, 13 установленных на штоках силовозбудителей 3, 4, 5, 6, 7, позволяет с высокой точностью измерять нагрузки, создаваемые на испытуемом образце невращающихся элементов автомата перекоса, а также управлять их нанесением. Использование датчиков силы 20 и 21, позволяет точно измерять нагрузки приходящие во время испытаний на рычаги продольного 15 и поперечного 16 управления.
Применение системы измерения и управления с использованием программного обеспечения позволяет упростить и ускорить настройку стенда, автоматизировать переходы между режимами с различными нагрузками, проводить испытания непрерывно круглые сутки, с автоматической защитой от выхода нагрузок за значения установленные программой испытаний. Это уменьшает календарное время и трудоемкость проведения испытания, а также повышает надежность хранения информации о параметрах испытаний.
Стенд для усталостных испытаний невращающихся элементов автомата перекоса вертолета поясняется следующими чертежами:
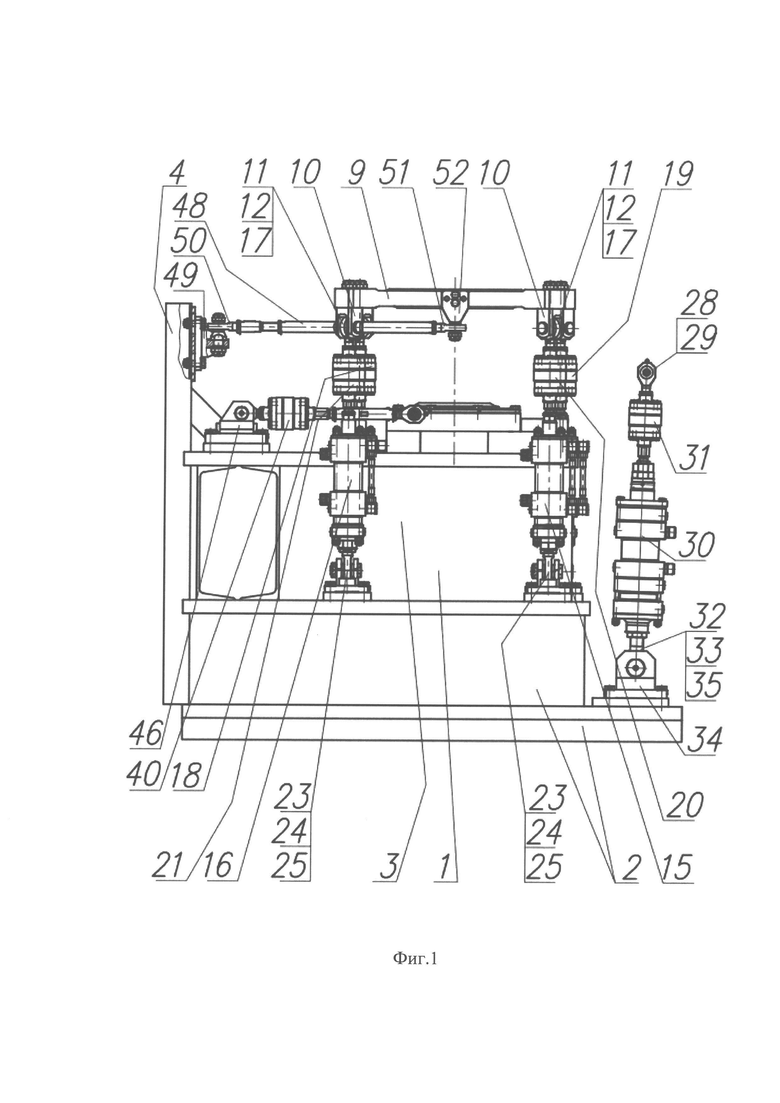
фиг. 1 - стенд с демонтированным автоматом перекоса.
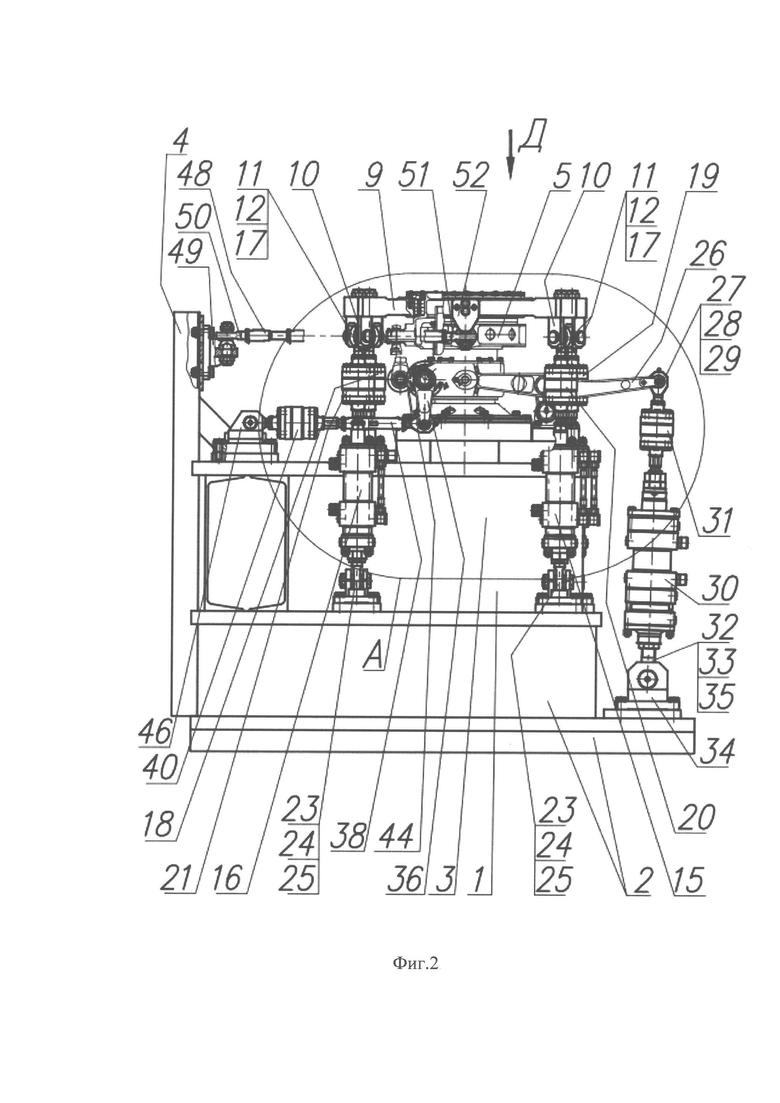
фиг. 2 - стенд для усталостных испытаний невращающихся элементов автомата перекоса с установленным испытуемым образцом вид фронтальный.
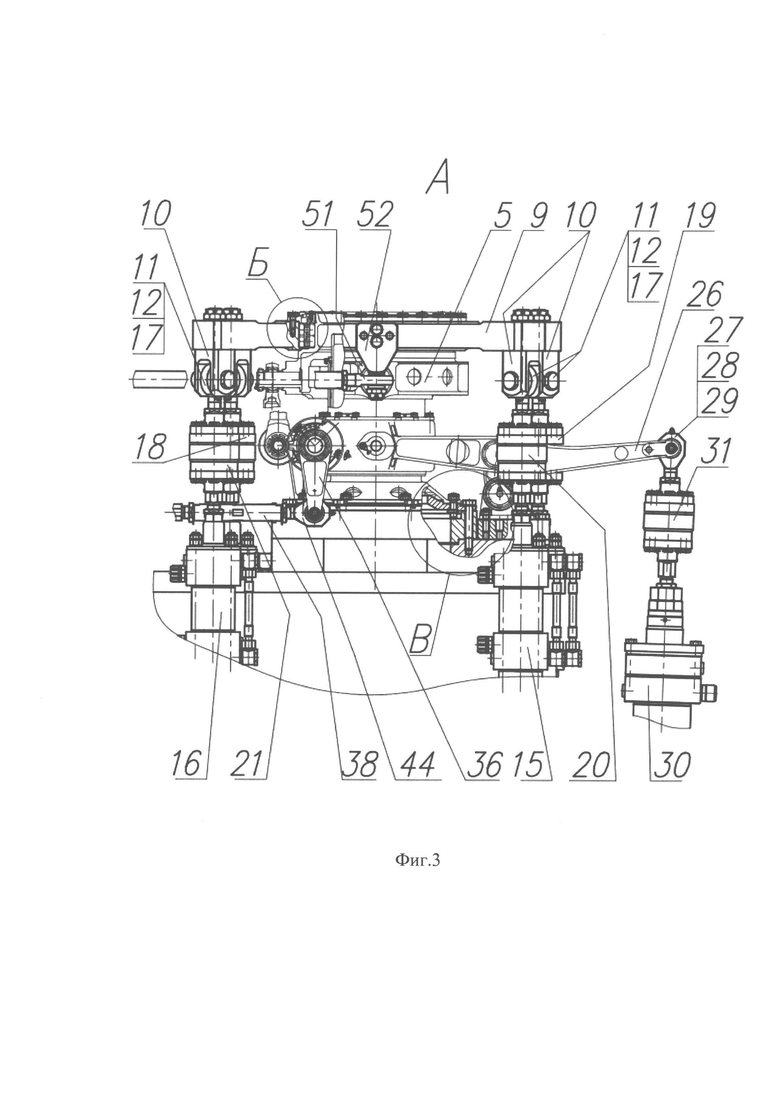
фиг. 3 - стенд для усталостных испытаний невращающихся элементов автомата перекоса вид сверху.
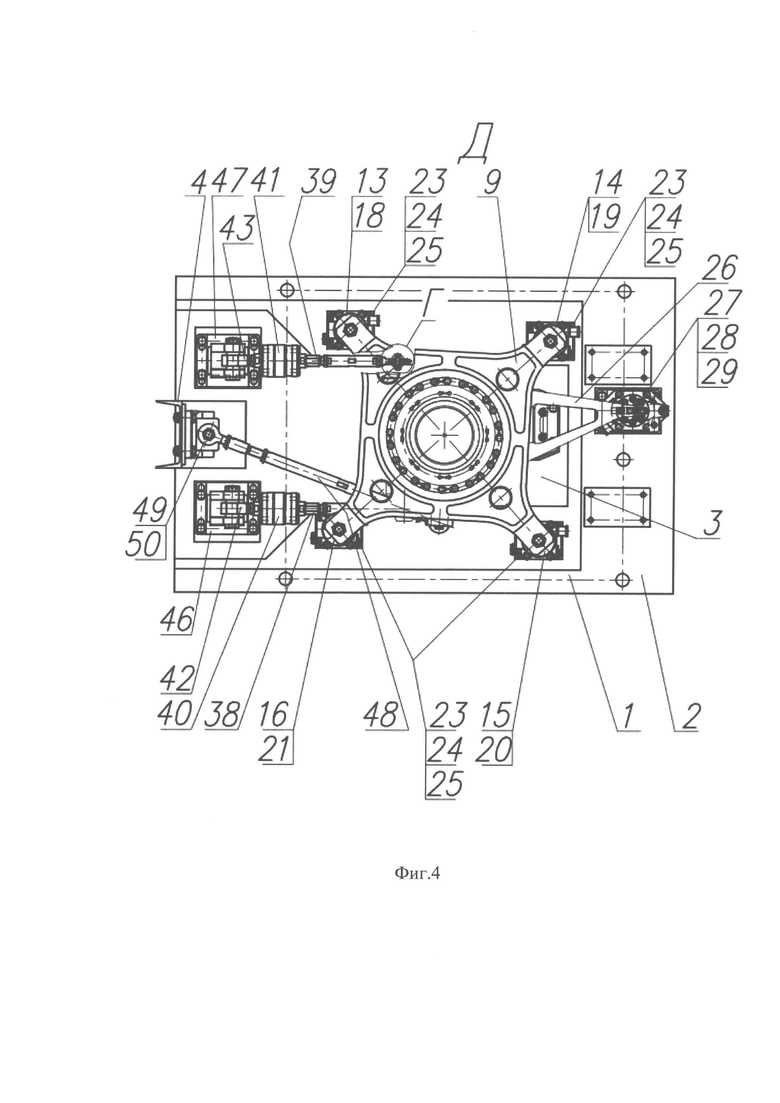
фиг. 4 - выносной элемент стенда с установленным испытуемым образцом.
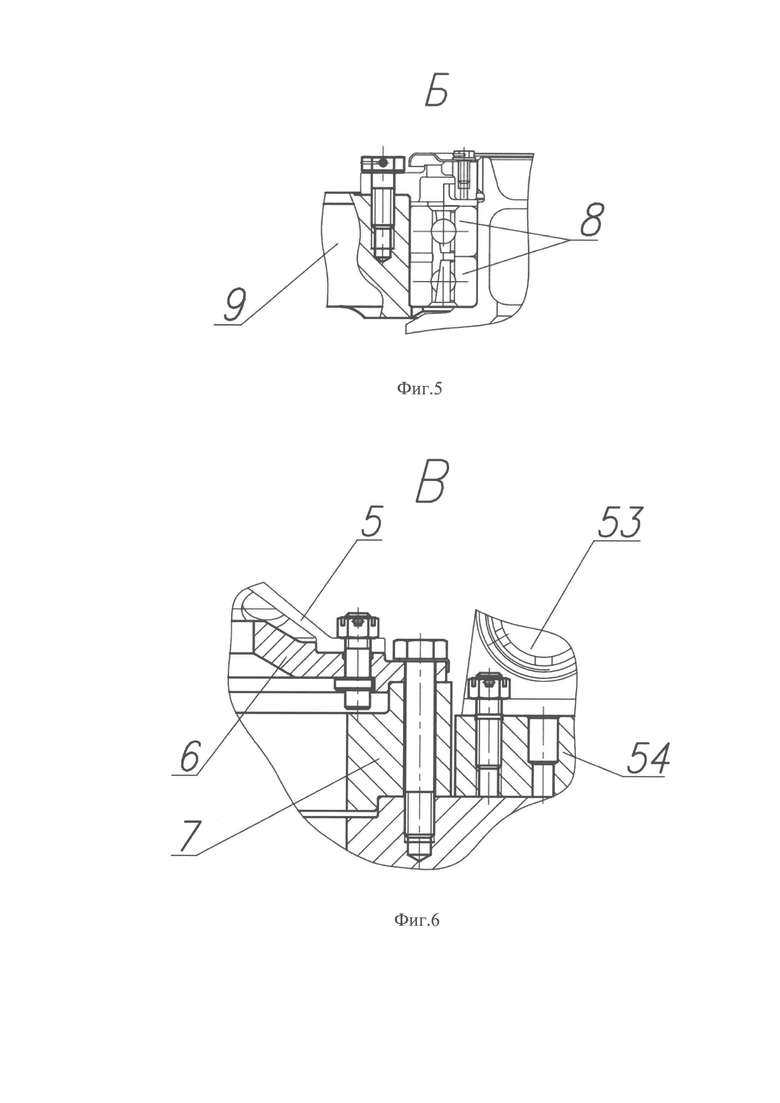
фиг.5 - выносной элемент поясняющий крепление имитатора вращающейся тарелки к испытуемому образцу.
фиг. 6 - выносной элемент поясняющий крепление испытуемого образца к раме стенда.
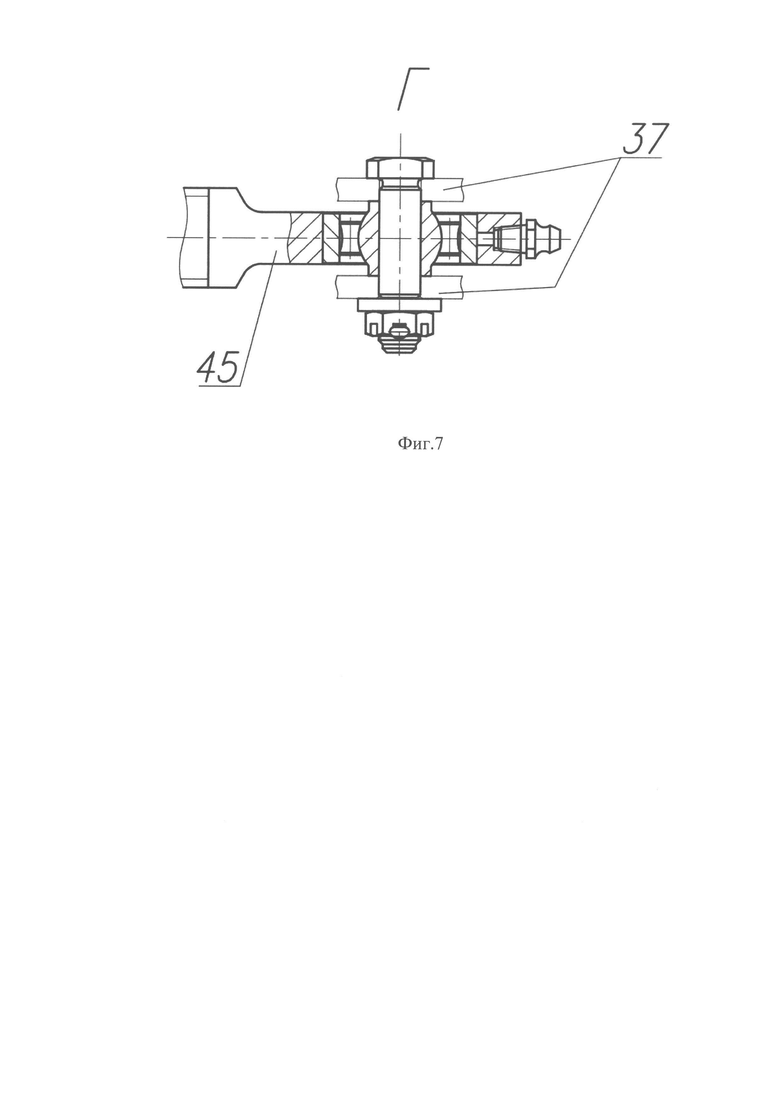
фиг. 7 - выносной элемент поясняющий крепление тяги к рычагу поперечного управления.
Стенд для износных испытаний автомата перекоса содержит раму 1, состоящую из основания 2, тумбы 3 и реактивной стойки 4. На тумбе рамы 3 установлен испытуемый образец, представляющий собой невращающиеся элементы автомата перекоса 5. Крепление испытуемого образца 5 к тумбе 3 осуществляется болтами через промежуточные плиты 6, 7 и 54, которые являются адаптерами для установки невращающихся элементов автоматов перекосов различных моделей вертолетов. На подшипниках 8, входящих в состав автомата перекоса, установлен имитатор вращающейся тарелки 9. Последний снабжен вилками 10 для крепления шарнирных подшипников 11 установленных в наконечниках штоков 12 гидравлических силовозбудителей 13, 14, 15, 16. Шарнирные подшипники 11 закреплены в вилках 10 на пальцах 17. Между наконечниками штоков 12 и штоками силовозбудителей 13, 14, 15, 16, установлены датчики силы 18, 19, 20, 21. Корпуса силовозбудителей 13, 14, 15, 16, закреплены на основании 2 рамы 1 посредством наконечников 22 с установленными в них шарнирными подшипниками 23, вилок 24 и пальцев 25.
Свободный конец рычага общего шага 26 испытуемого образца 5 невращающихся элементов автомата перекоса соединен посредством пальца 27 с шарнирным подшипником 28, который установлен в наконечнике штока 29 гидравлического силовозбудителя 30. Между наконечником штока 29 и штоком силовозбудителя 30 смонтирован датчик силы 31. Корпус силовозбудителя 30 закреплен на основании 2 рамы 1 посредством наконечника 32 с установленным в нем шарнирным подшипником 33, вилки 34 и пальца 35.
Рычаг продольного 36 и рычаг поперечного 37 управления образца невращающихся элементов автомата перекоса 5 соединены тягами 38 и 39 с тумбой 3 рамы 1. В состав тяг 38 и 39 входят датчики силы 40 и 41, а также наконечники 42, 43, 44, 45 с шарнирными подшипниками. Тяги 38 и 39 шарнирно закреплены в вилках 46, 47 установленных на тумбе 3 рамы 1, с помощью наконечников 42, 43. Наконечники 44, 45 тяг 38 и 39 соединены со свободными концами рычагов продольного 36 и поперечного 37 управления.
Имитатор вращающейся тарелки 9 соединен тягой 48 с реактивной стойкой 4 рамы 1. На реактивной стойке 4 установлен кронштейн 49 к которому крепится наконечник 50 тяги 48 через установленный внутри него шарнирный подшипник. Противоположный конец тяги 48 оснащен наконечником 51, который крепится через шарнирный подшипник к кронштейну 52 имитатора вращающейся тарелки.
Стенд для износных испытаний автомата перекоса работает следующим образом. Пред проведением испытаний, производится сборка образца невращающихся элементов автомата перекоса 5. При этом на подшипники 8 монтируется имитатор вращающейся тарелки 9 автомата перекоса. Далее производится монтаж собранного образца невращающихся элементов на стенд. К тумбе 3 рамы 1 образец 5 закрепляется болтами через промежуточные плиты 6 и 7. Кронштейн рычага общего шага 53 крепится болтами к промежуточной плите 54. Затем, вилки 10 присоединяются к имитатору вращающейся тарелки 9 с помощью резьбовых соединений. Вилки 10 заранее собраны с шарнирными наконечниками 12, датчиками силы 18, 19, 20, 21 и гидравлическими силовозбудителями 13, 14, 15, 16.
К рычагу общего шага 26 присоединяется шарнирный наконечник 29 собранный с датчиком силы 31 и гидравлическим силовозбудителем 30. Рычаги продольного и поперечного управления 36 и 37 присоединяются к шарнирным наконечникам 44 и 45 тяг 38 и 39.
После проведения указанных операций, оператор включает систему измерения и управления, и в напорные трубопроводы гидросистемы стенда подается рабочая жидкость под давлением. Гидравлические силовозбудители 13, 14, 15, 16 и 30 управляются сервоклапанами (на фигурах не показаны). Подавая электрические сигналы от системы измерения и управления на севоклапаны, оператор устанавливает режим нагружения образца 5 регламентированный программой испытаний. Гидравлические силовозбудители 13, 14, 15, 16 создают усилия на образце, имитируя нагрузки поступающие от тяг поворота лопасти во время реального полета вертолета. Параметры величины нагрузок, частоты их изменения и относительное смещение фаз имеют значения характерные для полетных режимов. Поддержание параметров нагрузок, которые создаются силовозбудителями 13, 14, 15, 16 производится автоматически системой управления стенда с использованием обратных связей по силам, измеряемым датчиками силы 18, 19, 20, 21. Во время работы силовозбудителей 13, 14, 15, 16 тяга 48 с шарнирными наконечниками 50 и 51 препятствует повороту имитатора вращающейся тарелки 9 вокруг подшипников 8.
Гидравлический силовозбудитель 30 имитирует воздействие системы управления вертолета на рычаг общего шага 26 образца 5. Изменение выдвижения штока силовозбудителя 30 имитирует различную величину общего шага несущего винта вертолета. Поддержание величины выдвижения штока силовозбудителя 30 поддерживается автоматически с помощью обратной связи по перемещению. В связи с этим гидравлический силовозбудитель 30 оснащен встроенным датчиком перемещения (на фигурах не показан). Кроме того, задавая перемещения штока гидравлического силовозбудителя 30 небольшой амплитуды с различными частотами, производится имитация воздействий на более высоких частотных гармониках, характерных для полета.
С помощью датчиков силы 40 и 41 установленные в тягах 38 и 39 производится измерение усилий создающихся во время испытаний на концах рычагов продольного 36 и поперечного 37 управления.
Операции предварительной настройки режимов испытаний производятся оператором ПЭВМ включенной в состав системы измерения и управления стенда. Дальнейшее поддержание режимов испытаний, переходы между режимами с различными нагрузками, сохранение информации о нагрузках в ходе испытаний, защита от перегрузок и других отклонений от режимов испытаний и т.д. осуществляется системой измерения и управления стенда в автоматическом режиме. Это позволяет проводить испытания при минимальном участии персонала с минимальными потерями технологического времени.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД ДЛЯ ИСПЫТАНИЙ ШЛИЦ-ШАРНИРА АВТОМАТА ПЕРЕКОСА ВЕРТОЛЕТА | 2021 |
|
RU2764324C1 |
| СТЕНД ДЛЯ ИЗНОСНЫХ ИСПЫТАНИЙ АВТОМАТА ПЕРЕКОСА ВЕРТОЛЕТА | 2019 |
|
RU2728216C1 |
| СТЕНД ДЛЯ ИСПЫТАНИЙ СОЧЛЕНЕНИЙ РУКАВОВ ВТУЛКИ С КОРПУСОМ ВТУЛКИ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА | 2022 |
|
RU2795551C1 |
| СТЕНД ДЛЯ ИСПЫТАНИЙ ЭЛАСТОМЕРНЫХ ПОДШИПНИКОВ | 2021 |
|
RU2767596C1 |
| АВТОМАТ ПЕРЕКОСА ВЕРТОЛЕТА | 2019 |
|
RU2728945C1 |
| Способ усталостных испытаний лопастей воздушного винта и установка для его осуществления | 2021 |
|
RU2767594C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИИ В СИСТЕМЕ ПРОДОЛЬНОГО УПРАВЛЕНИЯ И УПРАВЛЕНИЯ ОБЩИМ ШАГОМ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА | 2014 |
|
RU2556043C1 |
| Стенд для испытания ходовых колес крана | 1984 |
|
SU1219937A1 |
| СТЕНД ДЛЯ ДИНАМИЧЕСКИХ ИСПЫТАНИЙ ЭЛЕМЕНТОВ | 1990 |
|
RU2028591C1 |
| ДИНАМИЧЕСКИХ И РЕСУРСНЫХ ИСПЫТАНИЙ АВТОМАТОВ ПЕРЕКОСА ВЕРТОЛЕТОВ | 1966 |
|
SU184497A1 |
Изобретение относится к области испытательного оборудования, используемого при производстве летательных аппаратов. Стенд для испытаний невращающихся элементов автомата перекоса вертолета содержит раму (1) с закрепленными на ней нагружающими устройствами, а также средства измерения. Нагружающие устройства, шарнирно закрепленные на основании (2) рамы (1), выполнены в виде гидравлических силовозбудителей (3, 4, 5, 6, 7), каждый из которых снабжен датчиком силы, на которых закреплены шарнирные подшипники (11), соединенные с имитатором вращающейся тарелки (9) автомата перекоса (5). Силовозбудитель (7) через шарнирный подшипник (28), закрепленный на датчике силы (13), соединен с рычагом (26) общего шага автомата перекоса (14). Рычаги продольного (36) и поперечного (37) управления шарнирно соединены тягами (38, 39) с тумбой (3) рамы (1). Имитатор вращающейся тарелки (9) шарнирно соединен тягой (48) с реактивной стойкой (4) рамы (1). В тягах (17, 18) смонтированы датчики силы (20, 21). Обеспечивается возможность воспроизведения нагрузок на невращающиеся элементы автомата перекоса, характерных для различных режимов полета, повышение точности задания нагрузок. 1 з.п. ф-лы, 7 ил.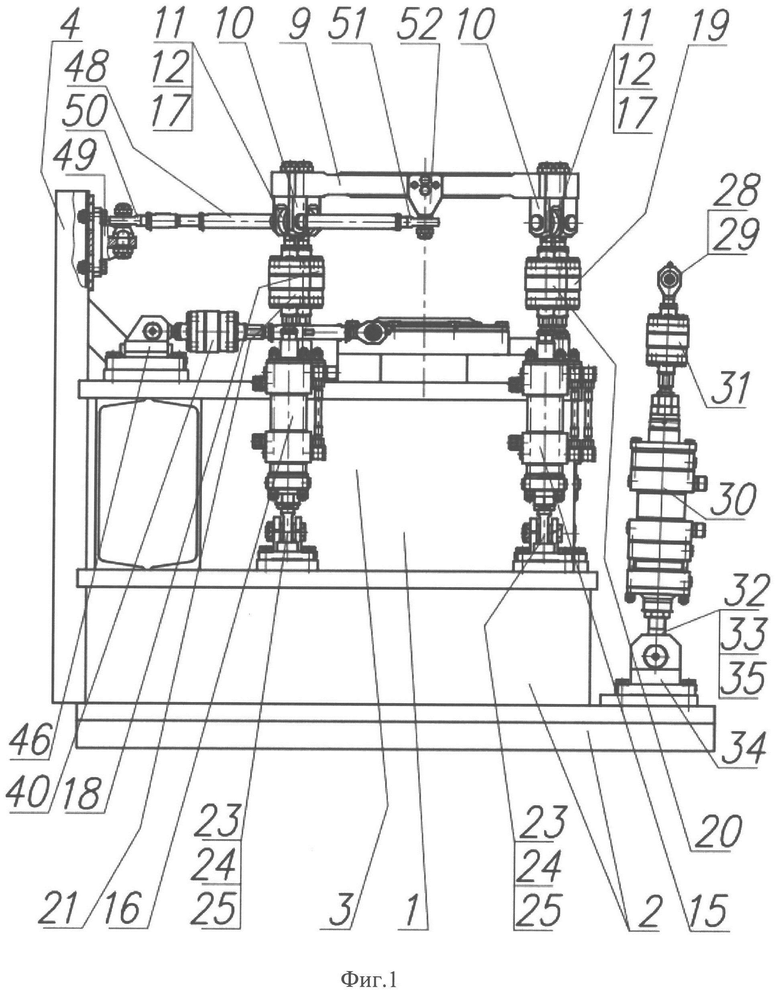
1. Стенд для испытаний невращающихся элементов автомата перекоса вертолета, содержащий раму с закрепленными на ней нагружающими устройствами, а также средства измерения, отличающийся тем, что нагружающие устройства выполнены в виде гидравлических силовозбудителей, снабженных датчиками силы, при этом четыре нагружающих устройства установлены между основанием рамы и имитатором вращающейся тарелки автомата перекоса с помощью шарниров, а одно нагружающее устройство установлено между основанием рамы и рычагом общего шага испытуемого образца автомата перекоса, также на шарнирах, рычаги продольного и поперечного управления испытуемого автомата перекоса шарнирно соединены тягами, включающими датчики силы, с тумбой рамы, а имитатор вращающейся тарелки шарнирно соединен тягой с реактивной стойкой рамы.
2. Стенд по п. 1, отличающийся тем, что он оснащен электронной системой управления и измерения.
| Стенд для испытаний элементов вертолета с соосными винтами | 2017 |
|
RU2664982C1 |
| ДИНАМИЧЕСКИХ И РЕСУРСНЫХ ИСПЫТАНИЙ АВТОМАТОВ ПЕРЕКОСА ВЕРТОЛЕТОВ | 0 |
|
SU184497A1 |
| 0 |
|
SU157136A1 | |
| KR 101368070 B1, 27.02.2014 | |||
| CN 107436237 A, 05.12.2017. | |||

