Стенд для износных испытаний автомата перекоса вертолета относится к испытательному оборудованию, а именно к стендам для износных (типовых, ресурсных, сертификационных, периодических) испытаний образцов автомата перекоса вертолета на воздействие динамических и статических нагрузок с характерными для полета углами качания и относительными скоростями взаимодействия в шарнирах тяг поворота лопастей и других шарнирных соединениях. Современный подход к испытаниям агрегатов автоматов перекосов вертолетов разделяет испытания на усталостные и износные. Износные испытания проводятся в отношении узлов и агрегатов, оснащенных различными видами подшипников (шарниров) качения и скольжения.
Известен стенд для усталостных испытаний автомата перекоса (патент KR 101368070, G01M 13/00, публ. 27.02.2014), в котором автомат перекоса испытывают на статическую прочность и усталостную долговечность вертолета путем выполнения испытания на вращение поворотной пластины путем установки фиктивного подшипника на основной узел вертолета посредством стенда. Стенд включает в себя базовую часть, основную часть вала, фиктивный подшипник, фиксатор, поворотный сенсорный элемент, исполнительный элемент штока шага, фиксирующий элемент и опорное основание с поворотным выступом. Применяется нагрузка тангажа и нагрузка сдвига вращательного типа. Исполнительный элемент датчика поворотного типа представляет собой устройство для приложения нагрузки к поворотной перекидной пластине. В процессе испытаний изменяется угол приложения динамической нагрузки, имитируя угол наклона, который является наиболее критическим состоянием системы управления полетом к основной системе управления. В настоящее время испытание на усталость представляет собой метод проведения испытания до тех пор, пока не произойдет разрушение, с тем чтобы получить значение усталостной характеристики.
Известен стенд (SU 184497, В64С 27/54, публ. 1966.07.21), предназначенный одновременно для динамических и ресурсных испытаний автоматов перекосов вертолетов, который воспроизводит спектр нагрузок состоящий из пяти гармоник. Стенд содержит закрепленный на раме, стендовый автомат перекоса, вращающаяся тарелка которого соединена регулируемыми шарнирными тягами с концами торсионов, которые установлены на вращающейся, синхронно с тарелкой, траверсе. Испытуемый образец закреплен тягами поворота лопасти к противоположным концам торсионов. Нагрузки по 5 гармоникам создаются внешними воздействиями на рычаги управления стендового и испытуемого автоматов перекосов.
Недостатком известного устройства является необходимость применения вертолетного автомата перекоса, аналогичного испытуемому, в качестве стендового узла. При испытаниях расходуется его ресурс, что требует больших затрат обусловленных необходимостью частой замены стендового автомата перекоса. Стенд предназначен для проведения полного комплекса усталостных и ресурсных испытаний, т.е. на стенде осуществлена попытка имитации реального полета. Но поскольку запись полетных нагрузок затруднена из-за помех, возникающих при передаче сигналов с вращающихся узлов, то и воспроизведение этих нагрузок не может быть точным. Кроме того, информация об углах качания в шарнирах тяг поворота лопасти представляет собой их амплитудные значения по первой гармонике. В связи с этим более актуальны износные испытания с воспроизведением первой гармоники. При их проведении выбираются амплитудные значения углов качания тяг поворота лопасти и угол наклона вращающейся тарелки автомата перекоса эквивалентный замеренному в полете, но с возможностью более точного воспроизведения. Динамические нагрузки, приводящие к усталостным повреждениям деталей и узлов автомата перекоса, воспроизводятся на специализированных стендах для усталостных испытаний упомянутых узлов и необязательны для воспроизведения на стенде для износных испытаний. Комплексные испытания по пяти параметрам имеют большую погрешность воспроизведения и трудоемки при применении ручной настройкой стенда.
Известен стенд для ресурсных испытаний автоматов перекоса несущих винтов вертолетов (SU 157136, МПК B64F 5/00, G01M 19/00), включающий раму со смонтированными на ней ведущим валом, планетарным редуктором и винтовыми механизмами, с целью нагружения испытуемых автоматов перекоса переменными усилиями, близкими к эксплуатационным, он снабжен механизмом, выполненным в виде эксцентриков, вращающихся от сателлитов планетарного редуктора с оборотами, кратными числу оборотов тарелки автомата перекоса, и передающих усилия с частотой второй и третьей гармоник несущего винта через систему дифференциальных рычагов и качалок на подпружиненные штоки, нагружающие автомат перекоса через тяги поворота лопастей.
Основным недостатком данной конструкции является невозможность задания по отдельности величины углов качания тяг поворота лопастей в шарнирах и нагрузки приходящей на эти шарниры, что усложняет настройку стенда на режимы испытаний. Кроме того, в полете основное влияние на углы качания в шарнирах тяг поворота лопасти формируется по первой гармонике и поэтому имитация высших гармоник при износных испытаниях не актуальна, поскольку это вызывает усложнение конструкции стенда и сложность его настройки. Используемые в конструкции винтовые механизмы требуют ручной настройки для воздействия на рычаги общего и циклического шага. Настройка стенда на испытания с учетом нескольких гармоник трудоемко. Используемый для имитации высших гармоник, планетарный редуктор громоздок, дорог и требует специального технического обслуживания.
Техническая проблема, не решенная в описанных стендах, решение которой обеспечивается заявляемым изобретением, заключается в создании устройства, в котором реализована возможность задавать нагрузки на шарниры тяг поворота лопасти независимо от углов качания этих тяг, с имитацией углов поворота узлов автомата перекоса, эквивалентных зарегистрированным в полете;
- это позволяет проводить испытания шарнирных подшипников тяг поворота лопасти, поводка и подшипников верхней тарелки автомата перекоса, с более точным выявлением ресурса на износ;
- упрощает настройку стенда в соответствии с параметрами программы испытаний, в которой отражены эквивалентные полетным режимам, значения угла наклона агрегатов автомата перекоса, и как следствие повышает точность воспроизведения нагрузок на шарниры тяг поворота лопасти и шарниры поводка а также упрощает конструкцию стенда и снижает эксплуатационные затраты;
- применение описанного подхода к износным испытаниям позволяет использовать для создания и поддержания нагрузок на узлы, подшипники и шарниры автомата перекоса автоматическую систему управления, что также повышает точность воспроизведения нагрузок и снижает трудоемкость настройки стенда;
- предлагаемое устройство не содержит авиационных агрегатов, которые расходуют свой ресурс в ходе проведения испытаний. Последнее, повышает надежность стенда, увеличивает его межремонтный ресурс.
Технический результат применения изобретения заключается в возможности задавать нагрузки на шарниры тяг поворота лопасти независимо от углов качания этих тяг; обеспечение плавного нарастания динамической и статической составляющих нагрузки; повышении точности задания нагрузок; возможности точно задавать необходимые углы качания в шарнирах тяг поворота лопастей; а также достигается снижение трудоемкости испытаний и упрощение настройки стенда.
Технический результат достигается за счет того, что в стенде для износных испытаний, включающем раму 1 с валом 8, на котором размещен механизм нагружения с упругими элементами, и установленными на раме 1 винтовыми приводами 19, 20, 21, в соответствии с заявляемым изобретением, - рама 1 состоит из основания 2 и закрепленных на нем стоек 3, при этом на стойках 3 закреплена поворотная балка 6 с помощью двух шарнирных опор 5, а в балке 6 установлен подшипниковый узел 7, в котором размещен вал 8 с жестко присоединенной к нему платформой 9, вал 8 соединен с выходным валом моторредуктора 10, при этом на платформе 9 установлены упругие элементы 11, выполненные в виде валов кручения 12 с присоединенными рычагами 13, поворотная балка 6 зафиксирована относительно рамы 1 посредством реактивных тяг 14, на основании 2 рамы 1 установлен вал 28, несущий блок подшипников 27, соединенный поводком 26 с платформой 9.
Кроме того, винтовые приводы 19, 20, 21 выполнены в виде электромеханических сервоприводов, управляющихся автоматической системой с использованием сигналов обратной связи от датчиков силы 32, 33, 34.
При этом необходимая амплитуда угла качания в концевых шарнирах 30 и 31 тяг поворота лопасти 29, при вращении платформы 9 синхронно с тарелкой верхней 24 автомата перекоса 4, задается величиной наклона поворотной балки 6, а нагрузки в тягах поворота лопасти 29 и шарнирах 30, 31 задаются перемещением винтовых сервоприводов 19, 20 и 21.
Применение в конструкции стенда поворотной балки 6, закрепленной на стойках 3 рамы 1 с помощью шарнирных опор 5, а также подшипникового узла 7, в котором размещен вал 8, соединенный с моторредукторм 10, и жестко присоединенной к нему платформой 9, позволяет задавать нагрузку на шарниры 30, 31 тяг поворота лопасти 29 независимо от углов качания этих тяг.
Использование, закрепленных на платформе 9, упругих элементов 11 выполненных в виде валов кручения 12 с присоединенными рычагами 13, направлено на обеспечение плавного нарастания динамической и статической составляющих нагрузки на шарниры автомата перекоса 4.
Наличие реактивных тяг 14 позволяет задавать необходимый угол наклона поворотной балки 6 при подготовке испытаний, что в свою очередь, обеспечивает точное задание угла качания в шарнирах 30, 31 тяг поворота лопасти 29 не зависимо от величины действующих нагрузок.
Применение винтовых приводов (19, 20, 21) выполненных в виде электромеханических сервоприводов, управляющихся автоматической системой с использованием сигналов обратной связи от датчиков силы 32, 33, 34 упрощает настройку стенда, снижает трудоемкость и повышает точность воспроизведения нагрузок при испытаниях.
Стенд электромеханический для износных испытаний автомата перекоса вертолета поясняется следующими чертежами:
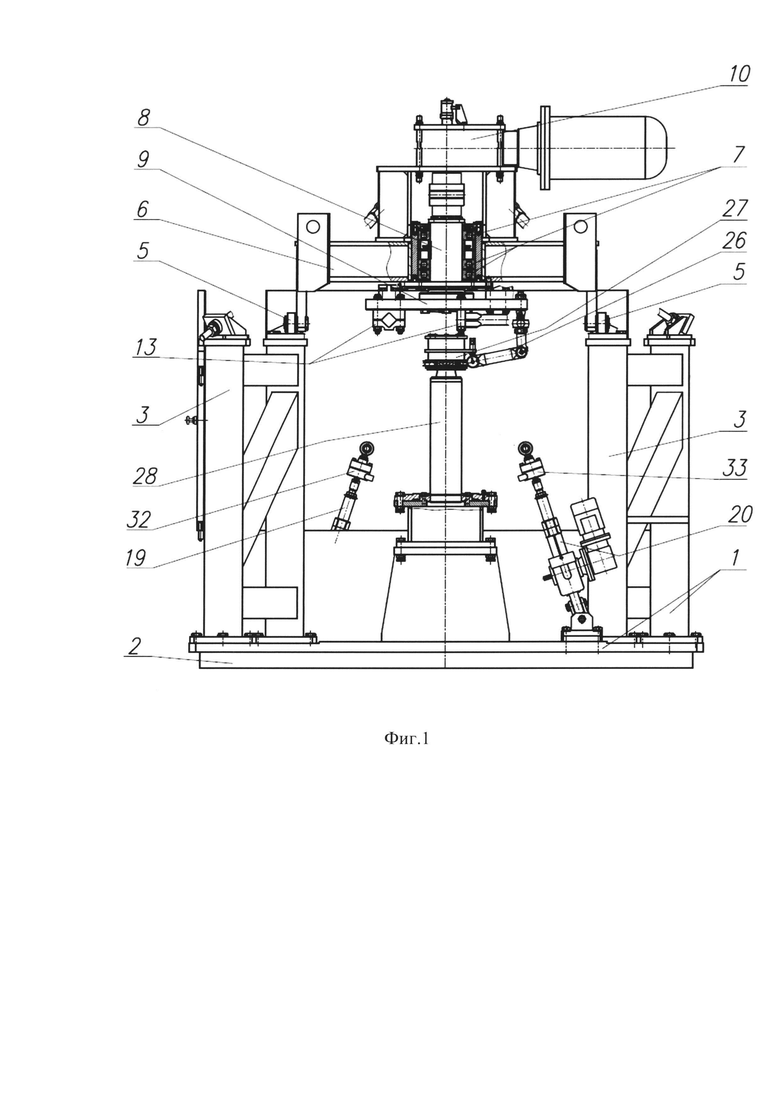
фиг. 1 - стенд с демонтированным автоматом перекоса.
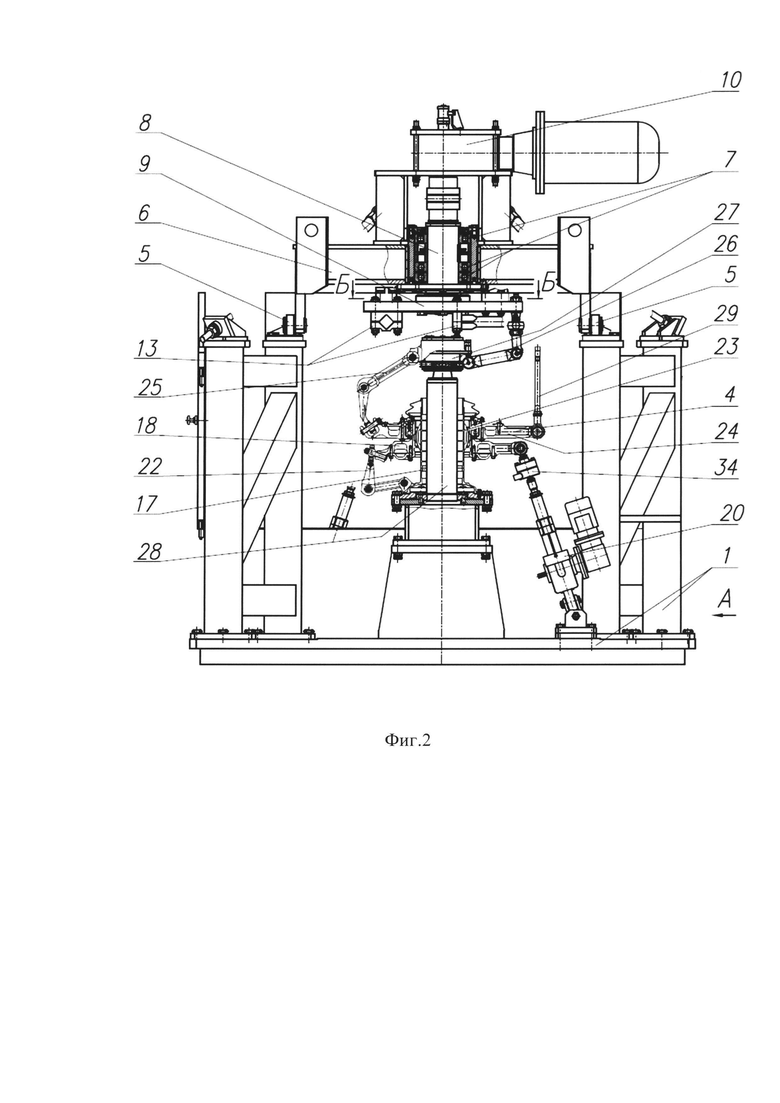
фиг. 2 - стенд электромеханический вид фронтальный.
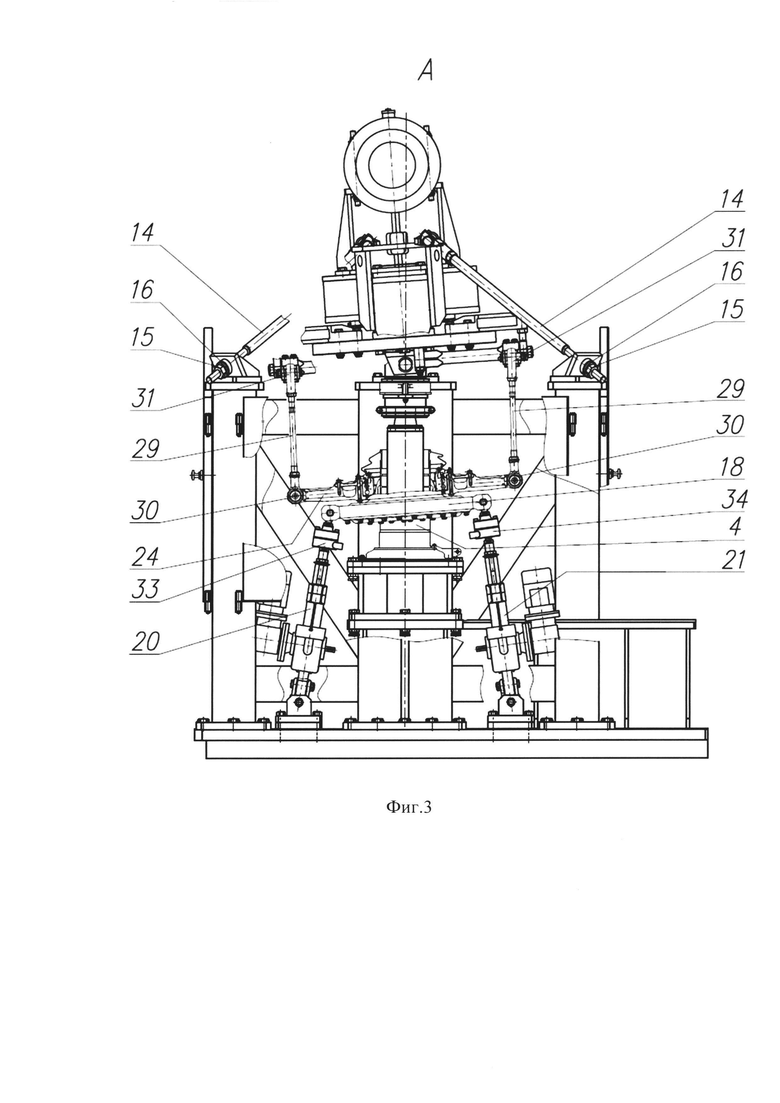
фиг. 3 - стенд электромеханический вид сбоку.
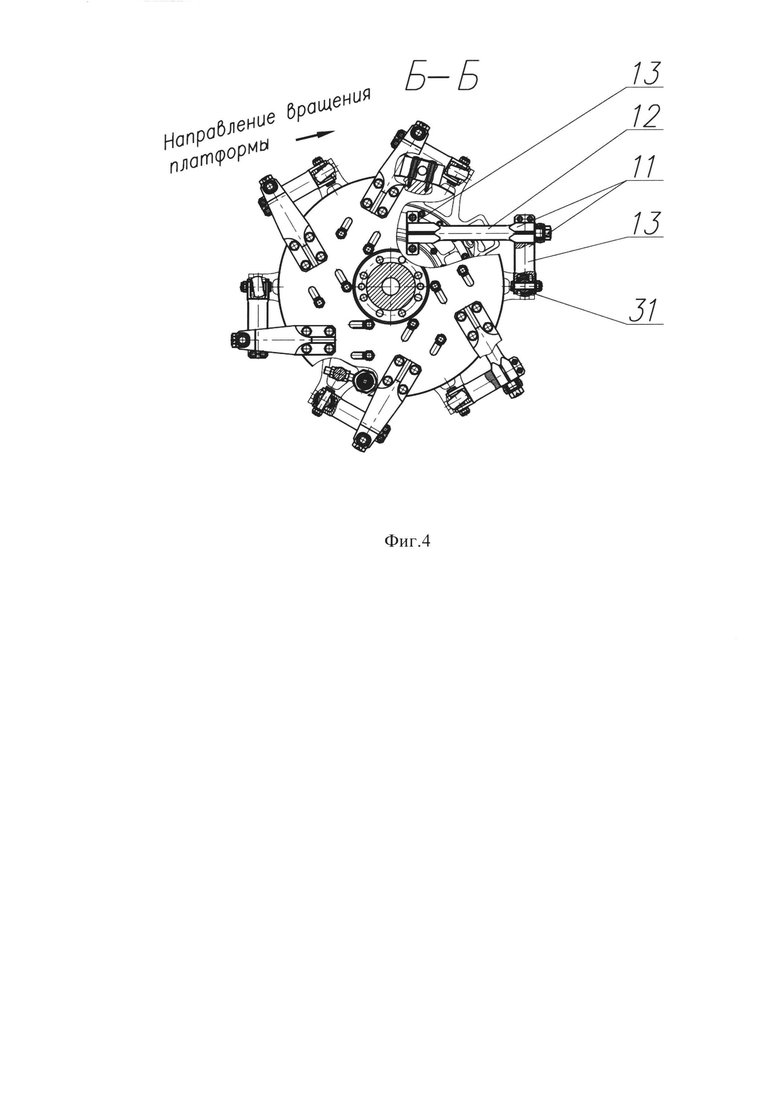
Фиг. 4 - вид сверху на платформу с упругими элементами.
Стенд для износных испытаний автомата перекоса содержит раму 1, состоящую из основания 2 и закрепленных на нем стоек 3. На основание 2 рамы 1 устанавливается испытуемый образец автомата перекоса 4 (фиг. 2, 3). На стойках 3, на двух шарнирных опорах 5, установлена поворотная балка 6 (фиг. 1, 2). В балке 6 смонтирован подшипниковый узел 7, в котором размещен вал 8 с жестко закрепленной на нем платформой 9. Вал 8 соединен с выходным валом коническо-цилиндрического моторредуктора 10 и приводится им во вращение во время испытаний. На платформе 9 установлены упругие элементы 11 (фиг. 4) выполненные в виде валов кручения 12 с присоединенными на одном конце рычагами 13. Валы кручения 12 закреплены на платформе 9 призмами 13. Поворотная балка 6 фиксируется от самопроизвольного поворота относительно стоек 3 рамы 1 с помощью реактивных тяг 14. Последние зафиксированы на стойках 3 рамы 1 с помощью гаек 15 и сферических шайб 16.
Направляющая 17 автомата перекоса 4 закреплена болтами на основании 2 рамы 1. Тарелка нижняя 18 автомата перекоса 4, также соединяется с основанием 2 рамы 1 стенда с помощью трех винтовых сервоприводов 19, 20 и 21 линейного перемещения. Эти сервоприводы получают движение от электродвигателей, которые входят в их конструкцию. Сервоприводы 19 и 20 присоединены шарнирно к тарелке нижней 18 автомата перекоса в местах крепления приводов продольного управления вертолетом, а винтовой сервопривод 21 шарнирно закреплен к нижней тарелке 18 в месте крепления привода поперечного управления вертолетом. Тарелка нижняя 18 соединена с направляющей 17 шарнирным поводком 22. Последний не позволяет тарелке нижней 18 поворачиваться вокруг направляющей 17. Тарелка нижняя 18 имеет возможность перемещаться в вертикальном направлении вдоль направляющей 17 и менять угол наклона к горизонтали поворачиваясь на сферической опоре 23 автомата перекоса. Тарелка нижняя 18 сочленяется с помощью подшипников качения с тарелкой верхней 24. Вращение последней во время испытаний осуществляется через поводок 25 верхней тарелки 24 и поводок стенда 26, которые соединены через блок подшипников 27. Последний установлен на вал 28, жестко соединенный с основанием 2 рамы 1 стенда.
В вилках тарелки верхней 24 установлены тяги поворота лопасти 29, которые оснащены нижними шарнирами 30 и верхними шарнирами 31. Во время испытаний углы поворота нижних шарниров 30 должны соответствовать по величине углам, замеренным при полете вертолета, а нагрузки на эти шарниры должны соответствовать параметрам программы испытаний. Кроме того, вышеназванные нагрузки являются обязательными для испытаний подшипников верхней тарелки.
Стенд для износных испытаний автомата перекоса работает следующим образом. Перед включением стенда, тяги поворота лопасти 29 завинчиваются в шарнирные наконечники 30 и 31 таким образом, что расстояние между центрами шарниров верхних наконечников 31 и нижних 30 по всем тягам поворота лопастей становится одинаковым. Поворотная балка 6 поворачивается оператором на угол заданный в программе испытаний с помощью навинчивания и свинчивания гаек 15 на резьбовых шейках реактивных тяг 14. После чего, фиксируется в этом положении затягиванием гаек 15. Наклон поворотной балки 6 с вращающейся на валу платформой позволяет создавать необходимую амплитуду углов качания в концевых шарнирах тяг поворота лопасти 30 и 31. Это качание возникает при вращении платформы 9 синхронно с тарелкой верхней 24 автомата перекоса 4. Величина угла качания в шарнирах 30 и 31 тяг поворота лопасти 29 равна двойному углу наклона балки 6. Наклон балки 6 приводит к наклону на аналогичный угол тарелки верхней 24 и вместе с ней тарелки нижней 18. К местам крепления привода продольного и поперечного управления тарелки нижней 18 шарнирно прикрепляются винтовые сервоприводы 19, 20 и 21 длина которых предварительно увеличивается или уменьшается включением их на выдвижение или на реверс. Винтовые сервоприводы 19, 20 и 21 управляются автоматической системой управления стенда с обратной связью по датчикам силы 32, 33, 34.
Производится запуск моторредуктора 10. При этом контролируется отсутствие растягивающих или сжимающих усилий на тягах поворота лопастей 29. Контроль сил, действующих на тяги поворота лопасти 29 и шарниры 30, 31 производится с помощью тензометрических датчиков (на фиг. не показаны) наклеенных на рычаги 13 упругих элементов 11.
После достижения валом 8, платформой 9 и тарелкой верхней 24 скорости вращения, заданной в программе испытаний, осуществляется нагружение тяг поворота лопасти 29 с шарнирами 30 и 31, динамической и статической составляющими сил. Постоянная составляющая нагрузки на тяги поворота лопасти 29 создается одновременным перемещением тарелки нижней 18, тарелки верхней 24 и сферической опоры 23 по направляющей 17 автомата перекоса 4 без изменения угла наклона тарелки верхней 24 относительно платформы 9. Переменная составляющая нагрузки, действующая по первой гармонике, на тягах поворота лопасти 29 создается путем дополнительного наклона тарелки верхней 24 автомата перекоса 4 на угол, отличающийся от наклона поворотной балки 6. Нанесение постоянной и переменной составляющих сил осуществляется с помощью винтовых сервоприводов 19, 20 и 21, воздействующих на места крепления приводов управления продольного и поперечного управления тарелки нижней 18 автомата перекоса 4. Плавное нарастание динамической и статической составляющих нагрузки на тяги поворота лопасти 29 при движении винтовых сервоприводов 19, 20 и 21, обеспечивается наличием в конструкции стенда упругих элементов 11. Винтовые сервоприводы 19, 20 и 21 управляются автоматической системой управления стенда с обратной связью по силе. Силы, создаваемые винтовыми сервоприводами 19, 20 и 21 измеряются с помощью датчиков силы 32, 33, 34.
Конструкция стенда позволяет избежать взаимовлияния параметров угла качания, динамической и статической составляющих сил в шарнирах 30 и 31 тяг поворота лопасти 29. Это дает возможность независимого управления и, как следствие, более точного воспроизведения этих параметров при износных испытаниях автоматов перекоса 4. Кинематическая схема предлагаемого стенда наиболее близко воспроизводит рабочую кинематику автомата перекоса 4 на вертолете, что также повышает точность воспроизведения нагрузок, замеренных в полете. Кроме того, предлагаемый стенд более прост конструктивно и в настройке режимов испытаний по сравнению с прототипом.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД ДЛЯ ИСПЫТАНИЙ ШЛИЦ-ШАРНИРА АВТОМАТА ПЕРЕКОСА ВЕРТОЛЕТА | 2021 |
|
RU2764324C1 |
| СТЕНД ДЛЯ ИСПЫТАНИЙ НЕВРАЩАЮЩИХСЯ ЭЛЕМЕНТОВ АВТОМАТА ПЕРЕКОСА ВЕРТОЛЕТА | 2021 |
|
RU2760598C1 |
| АВТОМАТ ПЕРЕКОСА ВЕРТОЛЕТА | 2019 |
|
RU2728945C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИИ В СИСТЕМЕ ПРОДОЛЬНОГО УПРАВЛЕНИЯ И УПРАВЛЕНИЯ ОБЩИМ ШАГОМ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА | 2014 |
|
RU2556043C1 |
| Одновинтовой скоростной вертолёт | 2022 |
|
RU2770945C1 |
| МАЛОРАЗМЕРНЫЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТОЛЕТНОГО ТИПА | 2023 |
|
RU2802879C1 |
| СТЕНД ДЛЯ ИСПЫТАНИЙ ЭЛАСТОМЕРНЫХ ПОДШИПНИКОВ | 2021 |
|
RU2767596C1 |
| НЕСУЩИЙ ВИНТ | 2005 |
|
RU2296697C1 |
| СООСНАЯ НЕСУЩАЯ СИСТЕМА | 2020 |
|
RU2751168C1 |
| Автомат перекоса однороторного летательного аппарата и способ его работы | 2020 |
|
RU2740039C1 |
Изобретение относится к области испытательной техники и может быть использовано для износных испытаний образцов автоматов перекоса вертолета. Стенд для износных испытаний включает раму (1) с валом (8), на котором размещен механизм нагружения с упругими элементами. На раме (1) установлены электромеханические винтовые сервоприводы (19, 20, 21). Рама (1) состоит из основания (2) и закрепленных на нем стоек (3), при этом на стойках (3) закреплена поворотная балка (6) с помощью двух шарнирных опор (5), а в балке (6) установлен подшипниковый узел (7), в котором размещен вал (8) с жестко присоединенной к нему платформой (9). Вал (8) соединен с выходным валом мотор-редуктора (10), при этом на платформе (9) установлены упругие элементы (11), выполненные в виде валов кручения (12) с присоединенными рычагами (13). Поворотная балка (6) зафиксирована относительно рамы (1) посредством реактивных тяг (14). На основании (2) рамы (1) установлен вал (28), несущий блок подшипников (27), соединенный поводком (26) с платформой (9). Обеспечивается повышение точности задания нагрузок, снижение трудоемкости испытаний и упрощение настройки стенда. 2 з.п. ф-лы, 4 ил.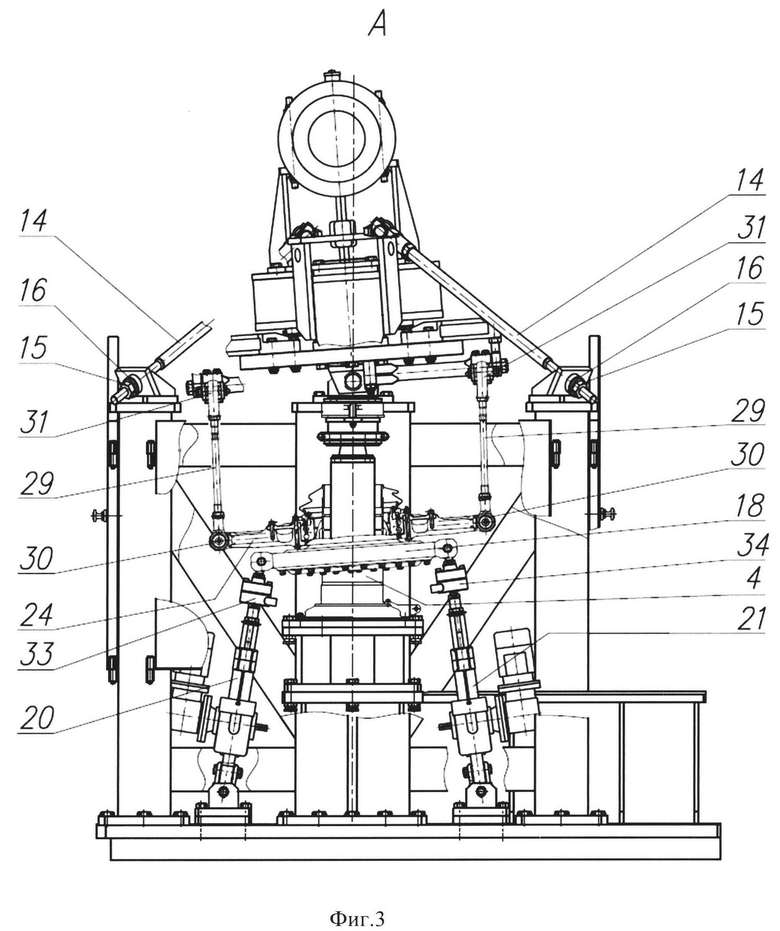
1. Стенд для износных испытаний автомата перекоса вертолета, включающий раму (1) с валом (8), на котором размещен механизм нагружения с упругими элементами, также на раме (1) установлены винтовые приводы (19, 20, 21), отличающийся тем, что рама (1) состоит из основания (2) и закрепленных на нем стоек (3), при этом на стойках (3) закреплена поворотная балка (6) с помощью двух шарнирных опор (5), а в балке (6) установлен подшипниковый узел (7), в котором размещен вал (8) с жестко присоединенной к нему платформой (9), вал (8) соединен с выходным валом мотор-редуктора (10), при этом на платформе (9) установлены упругие элементы (11), выполненные в виде валов кручения (12) с присоединенными рычагами (13), поворотная балка (6) зафиксирована относительно рамы (1) посредством реактивных тяг (14), на основании (2) рамы (1) установлен вал (28), на котором размещен блок подшипников (27), соединенный поводком (26) с платформой (9).
2. Стенд по п. 1, отличающийся тем, что винтовые приводы (19, 20, 21) выполнены в виде электромеханических сервоприводов, управляющихся автоматической системой с использованием сигналов обратной связи от датчиков силы (32, 33, 34).
3. Стенд по п. 1, отличающийся тем, что необходимая амплитуда угла качания в концевых шарнирах (30) и (31) тяг поворота лопасти (29), при вращении платформы (9) синхронно с тарелкой верхней (24) автомата перекоса (4), задается величиной наклона поворотной балки (6), а нагрузки в тягах поворота лопасти (29) и шарнирах (30), (31) задаются перемещением винтовых сервоприводов (19), (20) и (21).
| ДИНАМИЧЕСКИХ И РЕСУРСНЫХ ИСПЫТАНИЙ АВТОМАТОВ ПЕРЕКОСА ВЕРТОЛЕТОВ | 0 |
|
SU184497A1 |
| 0 |
|
SU157136A1 | |
| KR 101368070 B1, 27.02.2014 | |||
| СПОСОБ ФОРМИРОВАНИЯ ЗАБРЮШИННОЙ КОЛОСТОМЫ | 2019 |
|
RU2731795C1 |
| ИСПЫТАТЕЛЬНЫЙ СТЕНД ДЛЯ СОЗДАНИЯ РЕГУЛИРУЕМЫХ ДИНАМИЧНЫХ НАГРУЗОК | 2008 |
|
RU2352912C1 |

