Изобретение относится к космической технике и может быть использовано в системах управления движением (СУД) вокруг центра масс космических аппаратов (КА).
Известно, что при использовании для ориентации связанных осей КА в пространстве только информации от прибора ориентации на Солнце (ПОС) можно обеспечить ориентацию в пространстве одной из его связанных осей. Две другие будут занимать в пространстве произвольное положение.
Из патентной литературы известны способы ориентации трех осей КА в орбитальной (подвижной) системе координат, использующие информацию не только прибора ориентации на Солнце, но обязательно информацию и от других измерительных приборов (см. А.С. №1655842, кл. B64G 1/00 от 02.12.88 г.).
Наиболее близким из известных технических решений является выбранный в качестве прототипа способ ориентации осей космического аппарата в орбитальную систему координат, включающий запись в бортовую вычислительную машину параметров орбиты космического аппарата, задание космическому аппарату поисковой угловой скорости для обеспечения захвата Солнца полем обзора прибора ориентации, после чего снижение до нуля угловой скорости, обеспечивая нахождение Солнца в поле обзора прибора ориентации (пат. №2247684 С2 кл. B64G 1/24 от 25.03.2003 г.).
Однако при этом способе вся информация, необходимая для ориентации, рассчитывается в наземных центрах управления, а на КА выполняются только развороты вокруг осей космического аппарата для их ориентации в орбитальную систему координат. Кроме этого не определены правила выполнения этих разворотов.
По результатам моделирования этого способа требуется значительное время для ориентации осей космического аппарата в орбитальную систему координат, и как следствие, значительный расход рабочего тела или кинетического момента его исполнительными органами.
Задачей данного изобретения является создание автоматического способа управления движением космического аппарата вокруг своего центра масс, технический результат которого позволит на основании только характеристик орбиты космического аппарата, введенных в его бортовую цифровую машину, и текущей информации, полученной от прибора ориентации, на «солнечной» части витка, обеспечить ориентацию связанных осей космического аппарата в орбитальную систему координат за минимально необходимое для этого время и с минимально необходимым расходом рабочего тела или кинетического момента его исполнительными органами, используя при этом информацию об угловом положении осей космического аппарата только по отношению к Солнцу.
Указанный результат заявляемого решения достигается тем, что в способе ориентации осей космического аппарата в орбитальную систему координат, включающем запись в бортовую вычислительную машину параметров орбиты космического аппарата, задание космическому аппарату поисковой угловой скорости для обеспечения захвата Солнца полем обзора прибора ориентации, снижение до нуля поисковой угловой скорости, обеспечивая нахождение Солнца в поле обзора прибора ориентации, в соответствии с изобретением, вокруг одной из осей космического аппарата, которая в конце ориентации должна быть перпендикулярной к плоскости орбиты, создают угловую скорость, равную по величине угловой скорости вращения орбитальной системы координат вокруг ее оси ZОСК для орбиты этого космического аппарата, причем используют один и тот же единичный вектор направления на Солнце в орбитальной и связанной с космическим аппаратом системах координат для автоматического расчета углов рассогласования, рассчитывая две проекции этого вектора на связанные с космическим аппаратом оси координат по измерениям прибора ориентации на Солнце, а третью проекцию этого вектора на связанную ось координат определяют исходя из свойства этого вектора как единичного, при этом разворотами вокруг двух других связанных осей завершают ориентацию космического аппарата в орбитальную систему координат.
Далее изобретение поясняется с использованием чертежей.
На чертежах поясняется положение Солнца в поле обзора прибора ориентации на Солнце (ПОС), установленного определенным образом по отношению к связанным осям космического аппарата (КА).
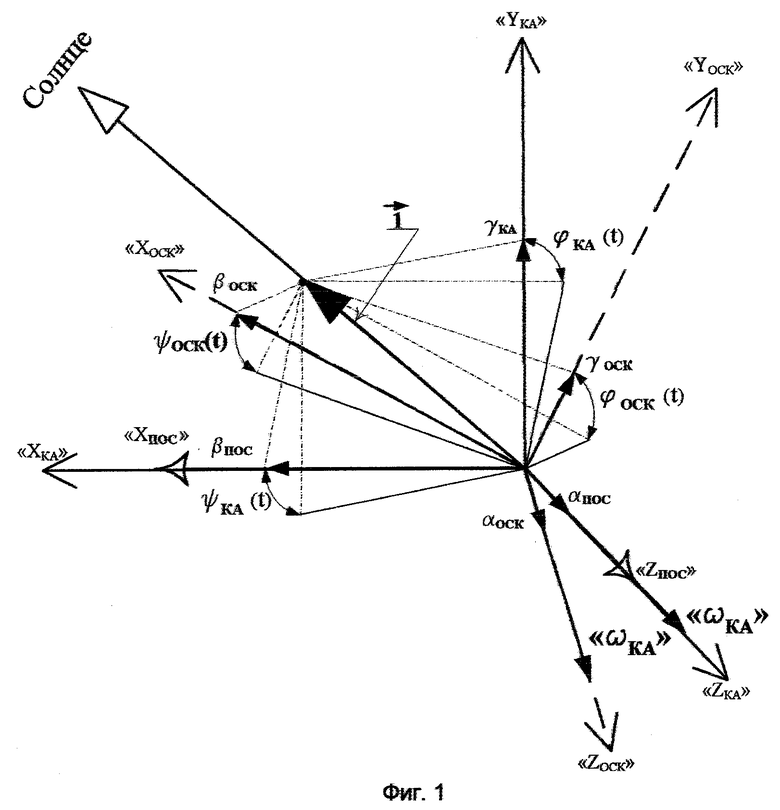
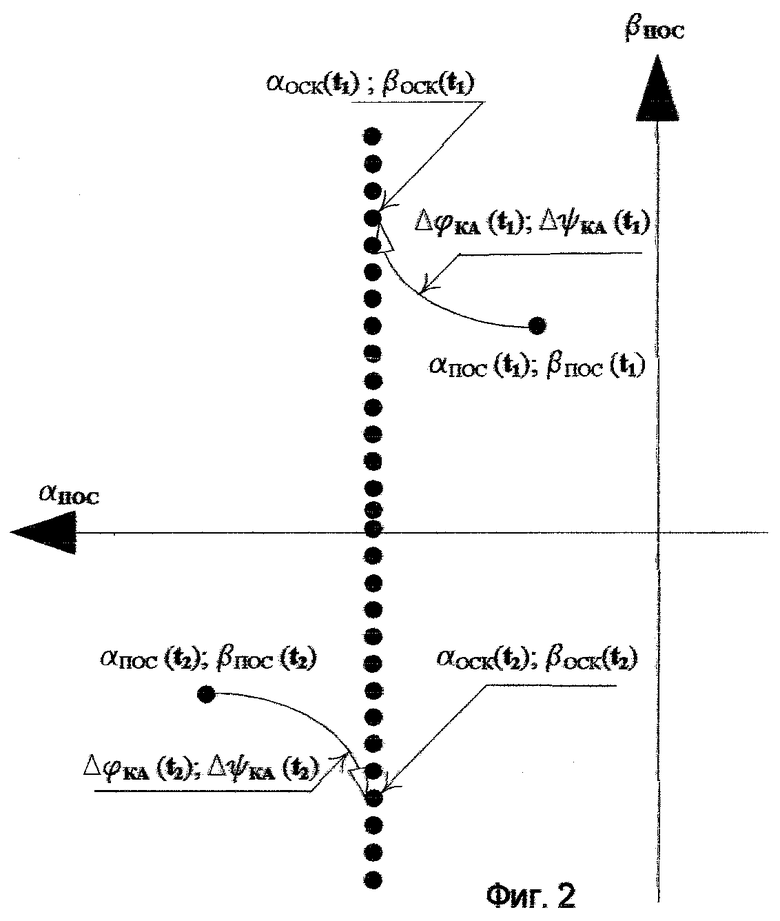
На фиг.1 изображен единичный вектор направления на Солнце в связанной с КА системе координат (ХКА, YКА, ZКА) и в орбитальной системе координат (ХОСК, YОСК, ZОСК) в один и тот же момент времени t. Для этого момента времени показаны значения проекций единичного вектора направления на Солнце в связанной с КА системе координат (βПОС, γКА, αПОС), полученных по результатам измерения ПОС, и предварительно рассчитанные в орбитальной системе координат (βОСК, γОСК, αОСК). На Фиг.2 так же изображен вектор угловой скорости ωКА, направленный по осям ZКА и ZОСК.
На фиг.2 приведены моменты (точки) измерения ПОС направления на Солнце в его приборных осях. Кроме этого изображено изменение значений αОСК, βОСК, измеряемых ПОС, в орбитальной системе координат (ОСК) за один виток для моментов времени tn. Для моментов времени t1 и t2 показаны значения αПОС (t1), βПОС (t1) и αПОС (t2), βПОС (t2), измеренные ПОС, в связанной с КА системе координат. Стрелками показано изменение значений αПОС (t1), βПОС (t1) и αПОС (t2), βПОС (t2), измеренные ПОС при развороте КА в моменты времени t1 и t2 на углы ΔφКА и ΔψКА вокруг осей ХКА и YКА соответственно.
На фиг.1 приведены следующие обозначения:
 - единичный вектор направления на Солнце;
- единичный вектор направления на Солнце;
ХКА, YКА, ZКА - связанные оси КА;
ХОСК, YОСК, ZОСК - оси орбитальной (подвижной) системы координат (ОСК);
ωКА - угловая скорость «обкатки» Земли, равная по величине рассчитанной угловой скорости вращения ОСК вокруг оси ZОСК для орбиты этого КА вокруг оси ZКA КА;
ХПОС - значение измерений ПОС при ориентации оси XКА на Солнце;
ZПОС - значение измерений ПОС при ориентации оси ZКА на Солнце;
αПОС - проекция единичного вектора направления на Солнце на ось ZКА КА;
βПОС - проекция единичного вектора направления на Солнце на ось ХКА КА;
γКА - проекция единичного вектора направления на Солнце на ось YКА КА;
αОСК - проекция единичного вектора направления на Солнце на ось ZОСК ОСК;
βОСК - проекция единичного вектора направления на Солнце на ось ХОСК ОСК;
γОСК - проекция единичного вектора направления на Солнце на ось YОСК ОСК;
φКA(t) - угол, образованный плоскостью между осями YКА, ZКА КА и плоскостью, образованной осью XКА и направлением на Солнце;
φОСК(t) - угол, образованный плоскостью между осями YОСК, ZОСК орбитальной системы координат и плоскостью, образованной осью ХОСК и направлением на Солнце;
ψКА(t) - угол, образованный плоскостью между осями ZКА, ХКА КА и плоскостью, образованной осью YКА и направлением на Солнце;
ψОСК(t) - угол, образованный плоскостью между осями ZОСК, ХОСК ОСК и плоскостью, образованной осью YОСК и направлением на Солнце.
На фиг.2 приведены следующие обозначения:
αПОС - результаты измерения ПОС направления на Солнце по его приборной оси α;
βПОС - результаты измерения ПОС направления на Солнце по его приборной оси β,
αПОС (t1) - результаты измерения αПОС ПОС в момент времени t1.
βПОС (t1) - результаты измерения βПОС ПОС в момент времени t1.
αОСК(t1) - результаты расчета значения α для ОСК в момент времени t1;
βОСК(t1) - результаты расчета значения β для ОСК в момент времени t1;
αПОС (t2) - результаты измерения αПОС ПОС в момент времени t2.
βПОС (t2) - результаты измерения βПОС ПОС в момент времени t2.
αОСК(t2) - результаты расчета значения α для ОСК в момент времени t2;
βОСК(t2) - результаты расчета значения β для ОСК в момент времени t2;
ΔφКА (t1) - значение требуемого угла разворота КА вокруг оси ХКА в момент времени t1;
ΔψКА (t1) - значение требуемого угла разворота КА вокруг оси YКА в момент времени t1;
ΔφКА (t2) - значение требуемого угла разворота КА вокруг оси ХКА в момент времени t2;
ΔψКА (t2) - значение требуемого угла разворота КА вокруг оси YКА в момент времени t2.
На Фиг.1 показано для произвольного момента времени t взаимное положение связанных осей КА (ХКА, YКА, ZКА), осей ОСК (ХПОС, YПОС, ZПОС) и единичного вектора на Солнце. Далее по тексту единичный вектор направления на Солнце называется вектором на Солнце. Из фигуры следует равенство:

следовательно, справедливо равенство:

Знаки αПОС, βПОС и γКА присваиваются согласно компоновке ПОС в осях КА.
Значения проекций единичного вектора на связанные оси КА ХКА и ZКА можно получить из равенств:


где β и α - результаты измерения ПОС текущего направления на Солнце;
ХПОС - значение измерений ПОС при ориентации оси ХКА на Солнце;
ZПОС - значение измерений ПОС при ориентации оси ZКА на Солнце.
Знаки αПОС, βПОС и γКА присваиваются согласно компоновке ПОС в осях КА.
Направление единичного вектора в связанной с КА системе координат можно задать и через направляющие косинусы:
cos βХ=βПОС, где βХ угол, образованный единичным вектором и осью ХКА;
cos αZ=αПОС, где αZ угол, образованный единичным вектором и осью ZКА;
cos γ=γКА, где γ угол, образованный единичным вектором и осью YКА.
Используя равенство (2, 3, 4), можно получить значения:
- угла между плоскостью, образованной осями XКА и YКА, и плоскостью, образованной осью YКА и единичным вектором направлением на Солнце ψКА=arctg (αПОС/βпос) или arcctg (βпос/αПОС);
- угла между плоскостью, образованной осями YКА и ZКА и плоскостью, образованной осью ХКА и единичным вектором направлением на Солнце φКА=arctg (αПОС/γКА) или arcctg (γКА/αПОС).
Аналогичным образом получают значения углов ψОСК и φОСК для ОСК, используя априорно рассчитанные значения αОСК, βОСК и γОСК.
Используя значения φКА и ψКА, а так же φОСК и ψОСК, для ОСК рассчитывают углы рассогласования ориентации осей ХКА и YКА в ОСК для данного момента времени, которые равны ΔφКА=φОСК-φКА и ΔψКА=ψОСК-ψКА соответственно.
Описанный способ может быть использован только на «солнечной» части витка.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОРИЕНТАЦИИ ОСЕЙ КОСМИЧЕСКОГО АППАРАТА В СОЛНЕЧНО-ОРБИТАЛЬНУЮ СИСТЕМУ КООРДИНАТ | 2009 |
|
RU2414392C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕКТОРА УГЛОВОЙ СКОРОСТИ СОБСТВЕННОГО ВРАЩЕНИЯ КОСМИЧЕСКОГО АППАРАТА ВОКРУГ ЕГО ЦЕНТРА МАСС | 2009 |
|
RU2396188C1 |
| СПОСОБ ОРИЕНТАЦИИ В ПРОСТРАНСТВЕ ОСЕЙ СВЯЗАННОЙ СИСТЕМЫ КООРДИНАТ КОСМИЧЕСКОГО АППАРАТА | 2010 |
|
RU2428361C1 |
| СПОСОБ ТРЕХОСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА В ОРБИТАЛЬНОЙ СИСТЕМЕ КООРДИНАТ | 2003 |
|
RU2247684C2 |
| Способ определения трёхосной пространственной ориентации космического аппарата | 2018 |
|
RU2696317C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРЕХОСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА | 2018 |
|
RU2691536C1 |
| СПОСОБ ФОРМИРОВАНИЯ УПРАВЛЯЮЩИХ ВОЗДЕЙСТВИЙ НА КОСМИЧЕСКИЙ АППАРАТ С ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЁТКОЙ | 2015 |
|
RU2604268C2 |
| Способ ориентации орбитального космического аппарата с программно-управляемыми батареями солнечными | 2015 |
|
RU2613097C1 |
| СПОСОБ УПРАВЛЕНИЯ ПИЛОТИРУЕМЫМ КОСМИЧЕСКИМ АППАРАТОМ, ОТСТЫКОВАННЫМ ОТ НАХОДЯЩЕГОСЯ НА ОКОЛОКРУГОВОЙ ОРБИТЕ НЕОРИЕНТИРОВАННОГО КОСМИЧЕСКОГО ОБЪЕКТА | 2000 |
|
RU2192993C2 |
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА В СОЛНЕЧНО-ЗЕМНОЙ СИСТЕМЕ КООРДИНАТ | 2017 |
|
RU2671598C1 |
Изобретение относится к системам управления движением космических аппаратов (КА) вокруг центра масс. Способ заключается в том, что перед началом ориентации осей КА в орбитальную (подвижную) систему координат в бортовую вычислительную машину записывают параметры его орбиты. Задают КА поисковую угловую скорость для захвата Солнца полем обзора прибора ориентации. После захвата Солнца снижают угловую скорость, обеспечивая нахождение Солнца в поле обзора прибора ориентации. Вокруг одной из осей КА, которая в конце ориентации должна стать перпендикулярной к плоскости орбиты, создают угловую скорость, равную по величине угловой скорости вращения орбитальной системы координат вокруг ее оси ZОСК для орбиты этого КА. При автоматическом расчете углов рассогласования между орбитальными и связанными осями используют один и тот же единичный вектор направления на Солнце в обеих системах осей координат. Две проекции этого вектора на связанные оси рассчитывают по измерениям прибора ориентации на Солнце, а третью проекцию на связанную ось координат определяют исходя из свойства данного вектора как единичного. Разворотами вокруг двух других связанных осей КА завершают его ориентацию в орбитальную систему координат. Техническим результатом изобретения является возможность автоматически рассчитывать указанные выше углы рассогласования по результатам измерения только направления на Солнце, ориентируя связанные оси КА в орбитальную систему координат на «солнечной» части витка. 2 ил.
Способ ориентации осей космического аппарата в орбитальную систему координат, включающий запись в бортовую вычислительную машину параметров орбиты космического аппарата, задание космическому аппарату поисковой угловой скорости для обеспечения захвата Солнца полем обзора прибора ориентации, снижение до нуля поисковой угловой скорости, обеспечивая нахождение Солнца в поле обзора прибора ориентации, отличающийся тем, что вокруг одной из осей космического аппарата, которая в конце ориентации должна быть перпендикулярной плоскости орбиты, создают угловую скорость, равную по величине угловой скорости вращения орбитальной системы координат вокруг ее оси ZОСК для орбиты этого космического аппарата, причем используют один и тот же единичный вектор направления на Солнце в орбитальной и связанной с космическим аппаратом системах координат для автоматического расчета углов рассогласования, рассчитывая две проекции этого вектора на связанные с космическим аппаратом оси координат по измерениям прибора ориентации на Солнце, а третью проекцию этого вектора на связанную ось координат определяют исходя из свойства этого вектора как единичного, при этом разворотами вокруг двух других связанных осей завершают ориентацию космического аппарата в орбитальную систему координат.
| СПОСОБ ТРЕХОСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА В ОРБИТАЛЬНОЙ СИСТЕМЕ КООРДИНАТ | 2003 |
|
RU2247684C2 |
| СПОСОБ УПРАВЛЕНИЯ РАЗВОРОТОМ КОСМИЧЕСКОГО АППАРАТА | 1998 |
|
RU2131832C1 |
| СПОСОБ УПРАВЛЕНИЯ РАЗВОРОТОМ КОСМИЧЕСКОГО АППАРАТА | 1996 |
|
RU2104232C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОСТРАНСТВЕННЫМ РАЗВОРОТОМ КОСМИЧЕСКОГО АППАРАТА | 1996 |
|
RU2115597C1 |
| US 5433402 A, 18.07.1995 | |||
| US 5452869 A, 26.09.1995 | |||
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |

