Изобретение относится к области гидроакустики, а именно к пассивным шумопеленгаторным станциям, осуществляющим обнаружение подводных объектов (ПО) и надводных объектов (НО) по их шумоизлучению, и предназначено для классификации обнаруженного объекта.
Известны способы классификации шумящего объекта [Марасев С.В., Машошин А.И., Подшивалов Г.А.; Акционерное общество «Концерн «ЦНИИ «Электроприбор». Способ определения класса шумящей цели и дистанции до нее. Патент №2681432 РФ, МПК G01S 15/00. №2018113387; Заявл. 12.04.2018; Опубл. 06.03.2019, Бюл. №7; Знаменская Т.К., Афанасьев А.Н.; Акционерное общество «Концерн «Океанприбор». Способ классификации гидроакустических сигналов шумоизлучения морского объекта. Патент №2754602 РФ, МПК G01S3/80. №2020138063; Заявл. 19.11.2020; Опубл. 03.09.2021, Бюл. №25; Пятакович В.А., Василенко A.M.; ФГКВОУ ВО «Тихоокеанское высшее военно-морское училище им. С.О. Макарова» МО РФ. Система обнаружения гидроакустических сигналов и их нейросетевой классификации. Патент №2681252 РФ, МПК G01S 15/04. №2018113985; Заявл. 16.04.2018; Опубл. 05.03.2019, Бюл. №7], осуществляющие разделение обнаруженного объекта на классы ПО и НО. Классификация по первому из этих способов [Патент №2681432] основана на отличиях указанных классов, связанных с уровнем шума в зависимости от скорости движения. Классификация по второму из способов [Патент №2754602] основана на отличиях, связанных с различными проявлениями низкочастотной модуляции сигнала. Классификация по третьему из способов [Патент №2681252] основана на анализе амплитудно-частотной характеристики сигнала, которая сравнивается с эталонными образами двух классов.
Недостатком этих и многих других способов классификации является то, что они не применимы при малых отношениях сигнал/помеха. В результате классификация объектов, обнаруженных на предельных дальностях, то есть при малых отношениях сигнал/помеха, оказывается малоэффективной.
Наиболее близким аналогом по техническому результату и основным операциям к предлагаемому изобретению является способ [Марасев С.В., Машошин А.И., Подшивалов Г.А.; Акционерное общество «Концерн «ЦНИИ «Электроприбор». Способ определения класса шумящего объекта. Патент №2746581 РФ, МПК G01S 11/14, G01S3/80, G01S 15/04. №2020118257; Заявл. 26.05.2020; Опубл. 19.04.2021, Бюл.№11], который принят за прототип.
Основные операции указанного способа можно сформулировать следующим образом:
измеряют глубину погружения приемной антенны шумопеленгаторной станции,
измеряют вертикальное распределение скорости звука в морской среде,
принимают шумовой сигнал объекта,
измеряют уровень сигнала и скорость изменения пеленга на объект,
принимают первое решение о классе объекта на основании анализа измеренных параметров,
в условиях, в которых скорость звука у поверхности моря превосходит скорость звука на глубине приемной антенны, дополнительно измеряют вертикальный угол прихода сигнала и принимают второе решение о классе объекта на основании анализа абсолютного значения измеренного вертикального угла,
принимают окончательное решение о классе объекта путем объединения первого и второго решений о классе с приоритетом второго решения.
В описании способа-прототипа указано, что приоритет по классу объекта отдается второму решению о классе, основанному на анализе вертикального угла прихода сигнала, поскольку именно это решение базируется на фундаментальном законе распространения сигнала в морской среде. Именно второе решение о классе позволяет повысить вероятность правильной классификации объектов, обнаруженных на предельных дальностях, то есть при малых отношениях сигнал/помеха, что обеспечивает технический результат способа-прототипа. Однако второе решение о классе возникает только при определенных гидролого-акустических условиях, в которых вертикальные углы прихода сигнала различны для подводных и надводных объектов. Такие условия чаще всего возникают в глубоком море, когда скорость звука у поверхности моря превосходит скорость звука на глубине приемной антенны. В этих условиях сигнал от подводного объекта захватывается подводным звуковым каналом и приходит к приемной антенне в узком диапазоне вертикальных углов, близких к горизонтальному направлению. Сигнал от надводного объекта не захватывается подводным каналом, при распространении многократно отражается от поверхности моря и его дна и приходит к приемной антенне в другом диапазоне вертикальных углов, отличном от горизонтального. В альтернативных гидролого-акустических условиях, в которых скорость звука у поверхности моря не превосходит скорость звука на глубине приемной антенны, например, в мелком море, сигналы от подводных и надводных объектов распространяются по близким траекториям и не имеют ярко выраженных различий в вертикальных углах прихода. В таких условиях способ-прототип будет работать по первому решению о классе, когда при малых отношениях сигнал/помеха вероятность правильной классификации будет низкой [Марасев С.В., Машошин А.И., Подшивалов Г.А.; Акционерное общество «Концерн «ЦНИИ «Электроприбор». Способ определения класса шумящего объекта. Патент №2746581 РФ, МПК G01S 11/14, G01S3/80, G01S 15/04. №2020118257; Заявл. 26.05.2020; Опубл. 19.04.2021, Бюл. №11].
Задача изобретения - расширить гидролого-акустические условия, в которых осуществляется объективная классификация объекта.
Для решения поставленной задачи в способ определения класса объекта, обнаруженного шумопеленгаторной станцией, в котором измеряют глубину погружения приемной антенны шумопеленгаторной станции, измеряют вертикальное распределение скорости звука в морской среде, принимают шумовой сигнал объекта, измеряют уровень сигнала и скорость изменения пеленга на объект, принимают первое решение о классе объекта на основании анализа измеренных параметров, анализируют измеренную скорость звука и уточняют решение о классе объекта,
введены новые признаки, а именно:
в условиях, когда скорость звука у поверхности моря не превосходит скорость звука на глубине приемной антенны,
измеряют задержку по времени между приходом сигнала по прямому лучу и приходом сигнала по лучу, отраженному от поверхности моря,
определяют пороговое значение задержки и принимают второе решение о классе объекта на основании сравнения измеренного значения задержки с ее порогом,
а окончательное решение о классе объекта принимают путем объединения первого и второго решений о классе с приоритетом второго решения.
Технический результат изобретения заключается в увеличении вероятности правильной классификации на дальности обнаружения объекта.
Покажем возможность достижения указанного технического результата предложенным способом.
Известно [Акустика океана. Под ред. Л.М. Бреховских. // М.: Наука, 1974, 693 с.], что в морской среде шумовой сигнал объекта распространяется в виде множества лучей, параметры которых на входе приемной антенны шумопеленгаторной станции зависят от гидролого-акустических условий и взаимного расположения по глубине погружения объекта и приемной антенны.
В условиях, когда скорость звука у поверхности моря не превосходит скорость звука на глубине приемной антенны, имеем гидролого-акустические условия сплошной освещенности. Такие условия характерны как для мелкого, так и для глубокого моря в зимний период года, когда температура воды в верхних слоях уменьшается. В северных широтах арктического бассейна такие условия сохраняются практически круглогодично. В этих условиях шумовой сигнал объектов, расположенных на разной глубине, распространяется по близким траекториям, стремясь не удаляться от поверхности моря, без отражения от дна. Наиболее интенсивными лучами, приходящими к антенне от любого объекта в таких условиях, всегда будут два луча: прямой луч и луч, отраженный от поверхности моря.
Здесь необходимо отметить, что в прикладной гидроакустике под надводными объектами (НО) понимаются объекты, находящиеся в воде, но при глубине погружения не более (около) десяти метров, а в качестве подводных объектов (ПО) принимаются все другие объекты, расположенные в толще воды с глубиной погружения 50 и более метров.
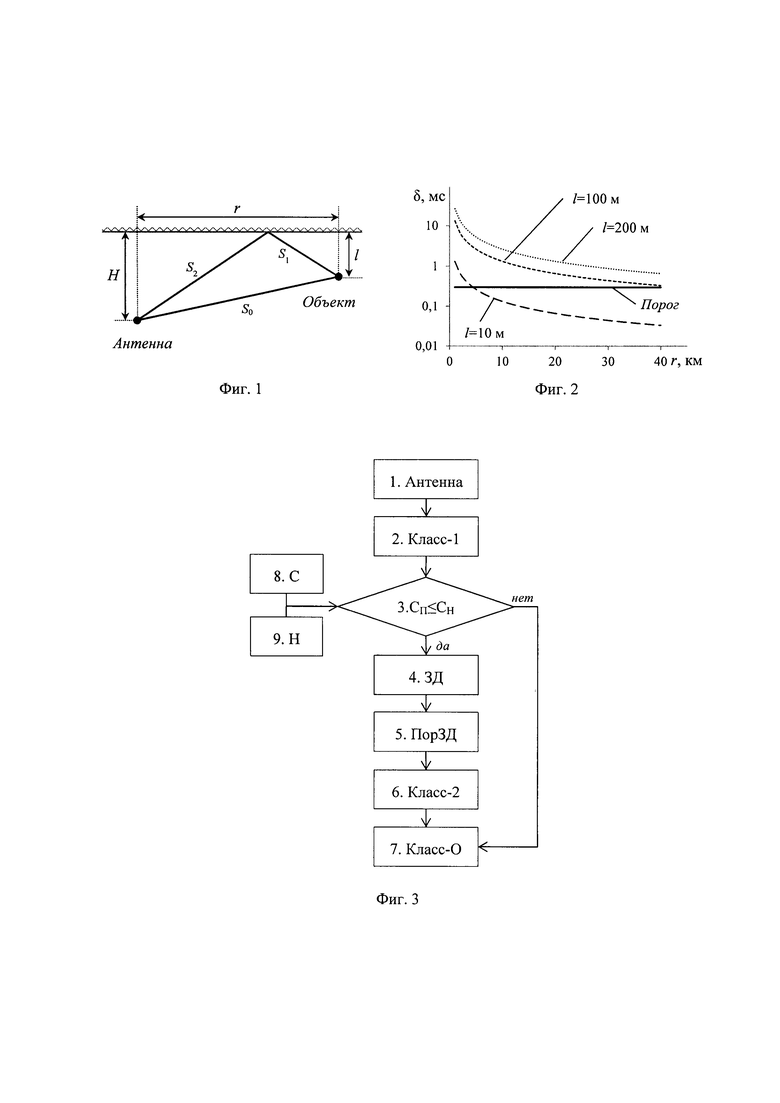
В наиболее простом случае постоянства скорости звука от глубины, пути, пройденные прямым и отраженным лучами от объекта к антенне (см. схему на фиг. 1), можно получить по теореме Пифагора:

где S0 - путь, пройденный прямым лучом;
S1+S2 - путь, пройденный отраженным лучом, как сумма пути от объекта до поверхности моря и пути от поверхности моря до антенны после отражения;
r - горизонтальное расстояние между объектом и антенной;
H - глубина погружения приемной антенны;
 - глубина погружения объекта.
- глубина погружения объекта.
Тогда задержка по времени 8 между лучами определится как:

где C=C(h)=const - скорость звука.
Как видно из совокупности выражений (1), (2), (3), задержка 8 между лучами зависит от глубины погружения объекта  . При этом, параметрами в указанном выражении можно считать глубину H приемной антенны, расстояние до объекта r и скорость звука C. Построив графики зависимости задержки δ от расстояния r для ПО и НО при фиксированной глубине H приемной антенны и фиксированной скорости звука, можно увидеть (см. фиг. 2), что во всем диапазоне расстояний задержка для подводного объекта всегда превышает задержку для надводного объекта. Тогда наиболее физически обоснованным в указанных условиях является разделение объектов на классы ПО и НО путем анализа задержки между приходом сигнала по прямому лучу и приходом сигнала по лучу, отраженному от поверхности моря.
. При этом, параметрами в указанном выражении можно считать глубину H приемной антенны, расстояние до объекта r и скорость звука C. Построив графики зависимости задержки δ от расстояния r для ПО и НО при фиксированной глубине H приемной антенны и фиксированной скорости звука, можно увидеть (см. фиг. 2), что во всем диапазоне расстояний задержка для подводного объекта всегда превышает задержку для надводного объекта. Тогда наиболее физически обоснованным в указанных условиях является разделение объектов на классы ПО и НО путем анализа задержки между приходом сигнала по прямому лучу и приходом сигнала по лучу, отраженному от поверхности моря.
В реальных гидролого-акустических условиях, когда C(h)≠const, лучи претерпевают рефракцию и становятся дугами окружностей, однако общая закономерность распространения сигнала в условиях сплошной освещенности вдоль прямого и отраженного лучей сохраняется. При этом, в связи с тем, что горизонтальное расстояние между объектом и антенной, достигающее десятков километров, значительно превышает возможные глубины погружения приемной антенны и объекта, не превышающие сотен метров, траектории лучей в виде дуг окружностей незначительно отклоняются от прямолинейных путей, и выражения (1), (2), (3) можно считать верными.
Новые процедуры предлагаемого способа дополняют исходную классификацию, основанную на анализе уровня сигнала и скорости изменения пеленга на объект, классификацией, основанной на анализе задержки между приходом сигнала по двум лучам, которая базируется на фундаментальных законах распространения сигнала в морской среде. При этом исходная классификация характеризуется низкой эффективностью. Это обеспечивает эффективную классификацию, в том числе, на предельных дальностях обнаружения шумового сигнала объекта без больших вычислительных затрат.
Сущность изобретения поясняется фиг .1, фиг. 2 и фиг. 3. На фиг. 1 изображена схема, поясняющая распространение сигнала от объекта к антенне по двум лучам. На фиг. 2. изображен график, поясняющий выбор порогового значения для классификации. На фиг. 3. изображена укрупненная блок-схема устройства, реализующего предлагаемый способ.
Структурная схема на фиг. 3 включает в себя последовательно соединенные антенну 1, блок 2 классификации, основанной на анализе уровня сигнала и скорости изменения пеленга на объект (Класс-1), блок 3 анализа измеренной скорости звука  блок 4 измерения задержки по времени между приходом сигнала по двум лучам (ЗД), блок 5 определения порогового значения задержки (ПорЗД), блок 6 классификации на основании анализа измеренной задержки (Класс-2), блок 7 окончательной классификации (Класс-О). Выход блока 8 измерения вертикального распределения скорости звука (С) и выход блока 9 измерения глубины погружения антенны (Н) подключены ко второму входу блока 3. Второй выход блока 3 подключен ко второму входу блока 7.
блок 4 измерения задержки по времени между приходом сигнала по двум лучам (ЗД), блок 5 определения порогового значения задержки (ПорЗД), блок 6 классификации на основании анализа измеренной задержки (Класс-2), блок 7 окончательной классификации (Класс-О). Выход блока 8 измерения вертикального распределения скорости звука (С) и выход блока 9 измерения глубины погружения антенны (Н) подключены ко второму входу блока 3. Второй выход блока 3 подключен ко второму входу блока 7.
Антенна 1 может быть реализована, например, согласно [Дмитриченко В.П., Иванова А.В., Старикович И.И., Шавель Ю.Б.; АО «Концерн «МПО-Гидроприбор». Широкополосная гидроакустическая антенна. Патент №2757358 РФ, МПК H04R 17/00. №2020139680; Заявл. 01.12.2020; Опубл. 14.10.2021, Бюл. №29]. Процедуры, реализуемые в блоках 2-7, могут быть реализованы программным образом в цифровом вычислительном комплексе современных гидроакустических систем [Бетелин В.Б., Капустин Г.И., Кокурин В.А., Корякин Ю.А., Лисс А.Р., Немытов А.И., Першин А.С., Рыжиков А.В., Челпанов А.В., Шалин С.А.; ФГУП «Центральный научно-исследовательский институт «Морфизприбор», Научно-исследовательский институт системных исследований РАН. Цифровой вычислительный комплекс для обработки сигналов в гидроакустических системах. Патент №2207620 РФ, МПК G06F15/16, G01S15/88. №2001106588/09; Заявл. 11.03.2001; Опубл. 27.06.2003, Бюл. №18]. В качестве блока 8 может быть использован, например, один из измерителей скорости звука, которые серийно выпускаются и устанавливаются совместно с гидроакустической аппаратурой [Комляков В.А. Корабельные средства измерения скорости звука и моделирование акустических полей в океане. - СПб.: Наука. - 2003]. В качестве блока 9 для измерения глубины погружения антенны может быть использован, например, датчик избыточного гидростатического давления, известный из [Комляков В.А. Корабельные средства измерения скорости звука и моделирование акустических полей в океане. - СПб.: Наука. -2003].
С помощью аппаратуры (фиг. 3) заявленный способ реализуется следующим образом.
Предварительно в блоке 8 измеряют вертикальное распределение скорости звука, то есть зависимость скорости звука от глубины С(h), что возможно осуществить измерителями, известными из [Комляков В.А. Корабельные средства измерения скорости звука и моделирование акустических полей в океане. - СПб.: Наука. - 2003].
В блоке 9 измеряют и фиксируют глубину H погружения приемной антенны шумопеленгаторной станции, что возможно осуществить с помощью датчика избыточного гидростатического давления [Комляков В.А. Корабельные средства измерения скорости звука и моделирование акустических полей в океане. - СПб.: Наука. -2003].
Вертикальное распределение скорости звука и глубина погружения антенны поступают в блок 3 для анализа измеренной скорости звука.
В процессе работы шумовой гидроакустический сигнал принимается антенной 1, где осуществляется его предварительная обработка, например, согласно [Корякин Ю.А., Смирнов С.А., Яковлев Г.В. Корабельная гидроакустическая техника. Состояние и актуальные проблемы. - СПб.: Наука. - 2004]. Принятый шумовой сигнал поступает в блок 2.
В блоке 2 осуществляется измерение уровня сигнала и скорости изменения пеленга на объект, а затем принимается первое решение о классе на основании анализа измеренных параметров. Для этого может быть использован способ [Марасев С.В., Машошин А.И., Подшивалов Г.А.; Акционерное общество «Концерн «ЦНИИ «Электроприбор». Способ определения класса шумящей цели и дистанции до нее. Патент №2681526 РФ, МПК G01S 11/14. №2018106745; Заявл. 22.02.2018; Опубл. 07.03.2019, Бюл. №7]. Полученное первое решение о классе передается в блок 7.
В блоке 3 осуществляется анализ измеренной скорости звука. Для этого определяют скорость звука на поверхности моря СП=С(h=0), определяют скорость звука на глубине погружения антенны CH=C(h=H) и производят их сравнение. В случае если скорость звука у поверхности моря не превосходит скорость звука на глубине приемной антенны, то есть СП≤CH, то дальнейшая обработка ведется по ветке блоков 4-5-6-7, где принимается второе решение о классе на основании анализа задержки по времени между приходом сигнала по двум лучам. В противном случае, обработка сразу переходит на блок 7.
В блоке 4 осуществляется измерение задержки по времени δ. Для этого формируют автокорреляционную функцию сигнала, находят в автокорреляционной функции локальный максимум с наибольшей амплитудой и фиксируют абсциссу этого максимума, которая и является измеренной задержкой δ. Формирование автокорреляционной функции является стандартной процедурой, известной из [Рабинер Л., Гоулд Б. Теория и применение цифровой обработки сигналов. Пер. с англ. М.: Мир, 1978]. Обнаружение локальных максимумов может быть реализовано на основании алгоритма обнаружения аномальных выбросов случайного процесса [Тейлор Дж. Введение в теорию ошибок. Пер. с англ. М.: Мир, 1985]. Выбор локального максимума с наибольшей амплитудой позволяет определить задержку по времени для пары наиболее интенсивных лучей, которыми являются прямой луч и луч, отраженный от поверхности моря. Измеренная задержка по времени передается в дальнейшую обработку.
В блоке 5 определяют пороговое значение задержки в текущих условиях наблюдения. Для этого используются соотношения (1), (2), (3), полученные для схемы распространения сигнала по двум лучам от объекта (Объект) к антенне (Антенна), приведенной на фиг. 1. Обозначения, принятые для фиг. 1, аналогичны обозначениям для соотношений (1), (2), (3). На фиг. 2 изображены графики зависимости задержки между лучами δ от расстояния r для трех объектов:
- надводный объект - объект на глубине  =10 м,
=10 м,
- подводный объект на глубине =100 м,
- подводный объект на глубине =200 м.
Графики получены для фиксированной глубины погружения антенны H = 100 м и скорости звука С = 1500 м/с.
График фиг. 2 поясняет выбор порогового значения для классификации. Видно, что задержка между лучами для любого подводного объекта во всем диапазоне расстояний превышает задержку между лучами для надводного объекта. Зная предельную дальность обнаружения сигнала объекта в шумопеленгаторной станции, можно выбрать в качестве порогового значения задержку по времени согласно выражению (3) с учетом (1) и (2):

где rmax - предельная дальность обнаружения сигнала;
H - измеренная текущая глубина погружения антенны;
ПО - глубина (наименьшая из возможных) погружения объекта, который считается подводным;
С - средняя скорость звука.
В блоке 6 принимают второе решение о классе объекта на основании сравнения измеренного значения задержки δ, полученного из блока 4, с ее порогом δПОР, полученным из блока 5. Принимают решение в пользу класса ПО, если δ>δПОР либо в пользу класса НО, если δ<δПОР. При равенстве δ=δПОР выносится отказ от принятия решения. При необходимости уменьшения ложной классификации зона отказа от принятия решения может быть расширена путем реализации двухпорогового алгоритма классификации, учитывающего среднеквадратическую ошибку измерения задержки, по аналогии со способом-прототипом. При этом среднеквадратическая ошибка измерения задержки определяется параметрами обработки сигнала, выбранными при формировании автокорреляционной функции.
В блоке 7 производится объединение первого и второго решений о классе с приоритетом второго решения. Алгоритм может быть реализован аналогично способу-прототипу. Если второе решение о классе принято в пользу класса ПО или НО, то именно это решение считается окончательным решением о классе. Если второе решение о классе не принято, то есть вынесен отказ от принятия решения, то окончательным решением становится первое решение о классе.
Таким образом, предлагаемый способ, использующий задержку по времени между приходом сигнала по прямому лучу и приходом сигнала по лучу, отраженному от поверхности моря, и базирующийся на фундаментальных законах распространения сигнала в морской среде, обеспечивает увеличение вероятности правильной классификации на дальности обнаружения объекта.
Все изложенное позволяет считать задачу изобретения решенной. Предложен способ определения класса объекта, обнаруженного шумопеленгаторной станцией, предназначенный для разделения на классы подводных (ПО) и надводных (НО) объектов, который обеспечивает повышение достоверности классификации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения глубины морского объекта с использованием шумопеленгаторной станции с донной линейной многоэлементной антенной | 2024 |
|
RU2838637C1 |
| Способ классификации морских объектов пассивными гидроакустическими средствами | 2018 |
|
RU2703804C1 |
| Способ определения дистанции до надводного корабля в условиях дальних зон акустической освещённости | 2022 |
|
RU2782619C1 |
| Способ определения координат морской шумящей цели | 2019 |
|
RU2724962C1 |
| Способ локализации в пространстве шумящего в море объекта | 2022 |
|
RU2788341C1 |
| УСТРОЙСТВО ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩЕМ В МОРЕ ОБЪЕКТЕ | 2015 |
|
RU2590933C1 |
| Способ определения глубины погружения шумящего в море объекта | 2023 |
|
RU2816481C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ ПОГРУЖЕНИЯ НИЖНЕЙ ТОЧКИ АЙСБЕРГА | 2015 |
|
RU2603831C1 |
| Способ определения класса шумящего морского объекта | 2021 |
|
RU2760912C1 |
| Способ получения информации о подводном шумящем объекте | 2022 |
|
RU2803528C1 |
Изобретение относится к области гидроакустики, а именно к пассивным шумопеленгаторным станциям, осуществляющим обнаружение подводных объектов (ПО) и надводных объектов (НО) по их шумоизлучению, и предназначено для классификации обнаруженного объекта. Способ основан на анализе в целях классификации уровня сигнала и скорости изменения пеленга на объект, когда производится анализ гидролого-акустических условий, в которых находится шумопеленгаторная станция. В условиях, когда скорость звука у поверхности моря не превосходит скорость звука на глубине приемной антенны, осуществляется дополнительная классификация путем анализа задержки по времени между приходом сигнала по прямому лучу и приходом сигнала по лучу, отраженному от поверхности моря. Технический результат изобретения заключается в увеличении вероятности правильной классификации на дальности обнаружения объекта. 3 ил.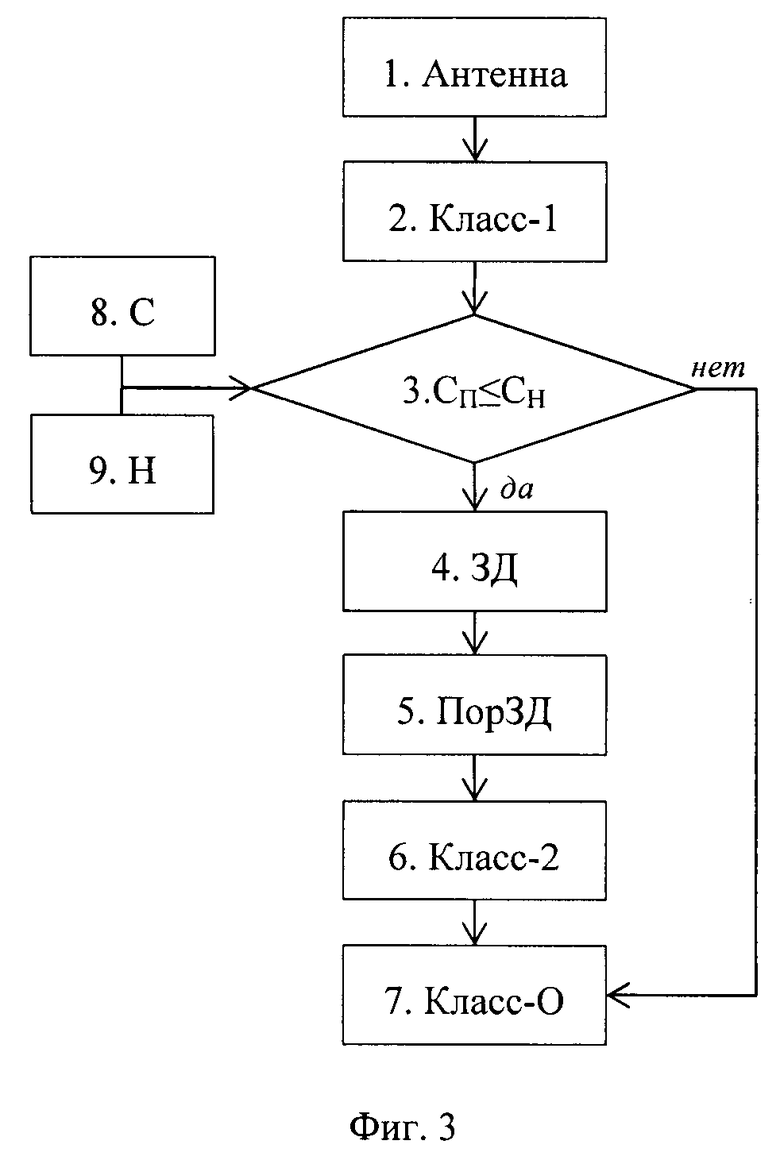
Способ определения класса объекта, обнаруженного шумопеленгаторной станцией, в котором измеряют глубину погружения приемной антенны шумопеленгаторной станции, измеряют вертикальное распределение скорости звука в морской среде, принимают шумовой сигнал объекта, измеряют уровень сигнала и скорость изменения пеленга на объект, принимают первое решение о классе объекта на основании анализа измеренных параметров, анализируют измеренную скорость звука и уточняют решение о классе объекта, отличающийся тем, что в условиях, когда скорость звука у поверхности моря не превосходит скорость звука на глубине приемной антенны, измеряют задержку по времени между приходом сигнала по прямому лучу и приходом сигнала по лучу, отраженному от поверхности моря, определяют пороговое значение задержки и принимают второе решение о классе объекта на основании сравнения измеренного значения задержки с ее порогом, а окончательное решение о классе объекта принимают путем объединения первого и второго решений о классе с приоритетом второго решения.
| RU 2746581 C1, 19.04.2021 | |||
| Способ пассивного определения координат шумящего в море объекта | 2021 |
|
RU2764386C1 |
| Способ локализации в пространстве шумящего в море объекта | 2022 |
|
RU2788341C1 |
| Способ определения координат морской шумящей цели | 2019 |
|
RU2724962C1 |
| Способ классификации, определения координат и параметров движения шумящего в море объекта в инфразвуковом диапазоне частот | 2019 |
|
RU2718144C1 |
| US 4200871 A1, 29.04.1980. | |||

