Изобретение относится к области неразрушающего контроля трубопроводов, других металлических конструкциях и может быть использовано для обнаружения питтинговой коррозии (питтинга) в контролируемых изделиях методом направленных акустических волн.
Уровень техники
Из уровня техники известен метод ультразвукового контроля трубопроводов с помощью устройства ультразвуковой толщинометрии с высоким разрешением, раскрытый в патенте на изобретение RU 2554323 С1 (МПК: G01N 29/04, G01B 17/02, опубл. 07.03.2018). Способ ультразвуковой толщинометрии с высоким разрешением основан на иммерсионном методе, который заключается в особенности распространения ультразвукового импульса в жидких и твердых средах, а также его отражения от границы раздела сред. Излучение и прием ультразвуковых импульсов производится пьезоэлектрическими преобразователями (далее - ПЭП). В иммерсионном методе ультразвуковые импульсы от ПЭП до объекта распространяются через жидкость. Данные, полученные, при вычислении границы начала изменения толщины стенки, в виде электрического сигнала поступают на аналого-цифровой преобразователь, а далее обрабатываются в логическом блоке, который по наличию в принимаемой диагностической информации дополнительных и превышающих порог эхо-импульсов включает анализ амплитуд сигналов и инициирует вычисление корректирующих значений, затем производится поправка диагностических данных с целью определения четких границ дефекта, и откорректированные уточненные данные поступают в блок накопителя информации.
Наряду с определением толщины стенки трубопровода, данный способ может быть применим к диагностированию некоторых коррозионных дефектов. Однако возможность обнаружения питтинга данным способом характеризуется низкой вероятностью
Из уровня техники известен также способ дефектоскопии магистральных нефте- и газопроводов в процессе их эксплуатации, защищенный патентом RU 2153163 С1 (МПК: G01N 29/04, G01N 29/10, опубл. 20.07.2000). Способ включает непрерывное перемещение дефектоскопа с электроакустическим преобразователем вдоль стенки трубопровода, генерирование электроакустическим преобразователем импульсов ультразвуковых колебаний, бесконтактную передачу импульсов ультразвуковых колебаний через перекачиваемую среду в стенку трубопровода, возбуждение ультразвуковых колебаний в стенке трубопровода, отражение ультразвуковых колебаний от неоднородностей материала стенки трубопровода, передачу отраженных ультразвуковых колебаний от стенки трубопровода к электроакустическому преобразователю, запись отраженных ультразвуковых колебаний и определение по результатам измерений характера, размеров и местоположения дефектов в стенке трубопровода. Данный способ дефектоскопии, основанный на сравнении амплитуд прямого и обратного импульсов, определении абсолютной величины коэффициента отражения и сравнения с эталонными данными размеров дефекта по толщине трубопровода, также не позволяет обнаружить несплошности (питтинг), плоскость раскрытия которых не ориентированы нормально к направлению акустической оси преобразователя. Наиболее близким аналогом заявленного изобретения является метод ультразвукового контроля поверхностными методами, раскрытый в главе 9 монографии (Диагностика технических устройств /[Г А. Бигус, Ю.Ф. Даниев, Н.А. Быстрова, Д.И. Галкин]. - М.: Изд-во МГТУ им. Н.Э. Баумана, 2014-615 с), основанный на регистрации изменения параметров упругих волн, возбужденных в контролируемом объекте. При реализации данного метода объект контроля прозвучивается короткими импульсами ультразвуковых колебаний, возбужденных с использованием пьезоэлектрического преобразователя. Отраженные от несплошностей колебания регистрируются тем же преобразователем, в результате на экране дефектоскопа появляется эхо-сигнал. Чем больше размер несплошностей, тем больше энергия отраженных колебаний и амплитуда эхо-сигнала.
Недостатком данного метода являются невозможность выявления тех несплошностей, плоскости раскрытия которых не ориентированы нормально к направлению контроля (акустической оси преобразователя), и не способных сформировать отраженный эхо-сигнал. Для питтинга характерно именно такое расположение плоскости раскрытия.
В приведенных аналогах реализован амплитудный критерий обнаружения дефектов, который предполагает наличие порога обнаружения сигнала, установленного с превышением уровня шума, как минимум 6 дБ и больше. На сильно корродированной поверхности металлических конструкций происходит рассеивание отраженного эхо-сигнала, что приводит к уменьшению амплитуды эхо-сигнала. При понижении амплитуды эхо-сигнала ниже порога происходит фиксация потери сигнала и, соответственно, потери информации о состоянии металлических конструкций (в частности, трубопровода) в контролируемом участках. В силу этих причин в отобранных аналогах невозможно образмерение питтинга и определение его глубины.
Питтинг (питтинговая коррозия) является типичным концентратором напряжений, в области которого происходит резкое увеличение механических напряжений, увеличивающих риск разрушения трубопровода, даже в отсутствие сквозного поражения. Питтинговую коррозию оценивают не по потере массы металла, а числом питтингов на единицу площади, их диаметром и глубиной. Поэтому выявление питтинговой коррозии, учитывая малые размеры питтингов и сложность их обнаружения известными способами ультразвуковой толщинометрии, включая способы, заявленные в отобранных аналогах, является трудной задачей при проведении внутритрубной диагностики трубопроводов.
Раскрытие сущности изобретения
Технической проблемой, на решение которой направлено изобретение, является разработка способа обнаружения питтинговой коррозии ультразвуковыми преобразователями, предназначенными для проведения ультразвуковой толщинометрии стенки трубопровода.
Технический результат заявленного изобретения - обеспечение обнаружения питтинговой коррозии в стенке трубопровода за счет применения энергетического критерия обнаружения дефектов, основанного на сравнении энергии отраженных сигналов от стенки трубопровода без дефекта и с наличием дефекта, и определение глубины питтинга.
Совокупность существенных признаков, достаточная для достижения указанного технического результата и определяющая объем правовой охраны предлагаемого изобретения, включает способ обнаружения питтинговой коррозии с помощью ультразвуковых пьезоэлектрических преобразователей, предназначенных для проведения ультразвуковой толщинометрии стенки трубопровода, при этом осуществляют генерацию запускающего импульса и прием отраженных эхо-сигналов через постоянный интервал дистанции - скан, усиливают, оцифровывают и передают в бортовой вычислитель по каждому пьезоэлектрическому преобразователю оцифрованную осциллограмму принятого эхо-сигнала, производят накопление и усреднение оцифрованных осциллограмм за два и более циклов озвучивания в каждом скане, измеряют интервал времени между фронтом излученного прямого ультразвукового сигнала и фронтом принятого отраженного ультразвукового сигнала от внутренней поверхности стенки трубопровода, образующий первый эхо-сигнал, вычисляют энергию первого эхо-сигнала; измеряют интервал времени между фронтом первого эхо-сигнала и фронтом принятого отраженного эхо-сигнала от внешней поверхности стенки трубопровода, образующий второй эхо-сигнал, вычисляют энергию второго эхо-сигнала, сравнивают величину энергии второго эхо-сигнала текущего А-скана с величинами энергий вторых эхо-сигналов предыдущих А-сканов, обнаруживают третий эхо-сигнал, в интервале между первым и вторым эхо-сигналами, при наличии третьего эхо-сигнала вычисляют энергию третьего эхо-сигнала, измеряют временной интервал между максимумами энергий второго и третьего эхо-сигналов, определяют глубину питтинга.
Кроме того, указанный технический результат достигается в частных случаях реализации изобретения за счет того, что:
- применяют когерентное накопление оцифрованных осциллограмм эхо-сигналов в одном А-скане с последующим усреднением;
- формируют на А-скане скользящее окно анализа Та, ширина которого определяется исходя из частоты ультразвукового сигнала по соотношению:
Та=р×1/Fs,
где р - коэффициент, определяющий ширину окна анализа, равный 0,5…2,0;
Fs - частота ультразвукового сигнала озвучивания, сек-1;
- вычисляют энергию эхо-сигналов с последующим определением максимумов энергии.
Осуществление способа
В основе заявленного способа положен не амплитудный критерий обнаружения дефектов в трубопроводе, реализованный в способах-аналогах, а энергетический критерий, базирующийся на сравнении энергии отраженных сигналов от стенки трубопровода без дефекта и с наличием дефекта (питтингом).
Осуществление заявленного способа обнаружения питтинговой коррозии поясняется фиг. 1-8, где
на фиг. 1 изображена конструкция носителя ПЭП с траекториями ультразвуковых сигналов;
на фиг. 2 изображена зона затенения питтингом части площади зоны озвучивания стенки трубопровода;
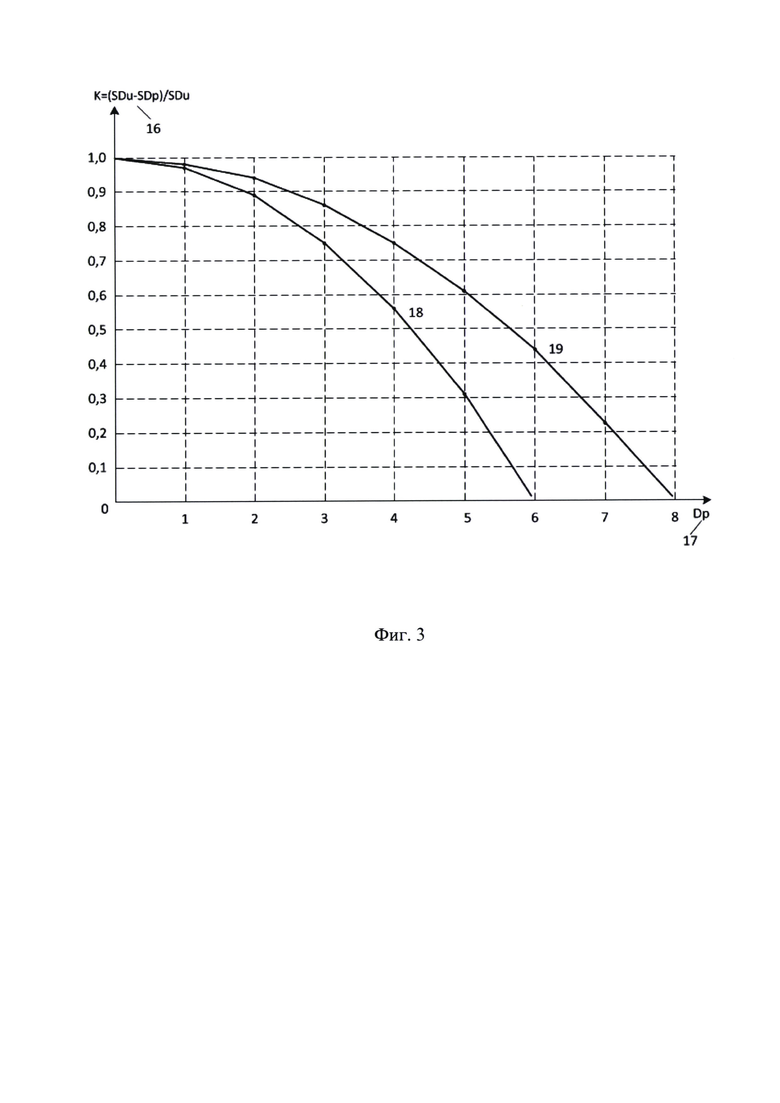
на фиг. 3 изображен график расчетной зависимости относительной величины затенения от диаметра питтинга для зон озвучивания диаметром 6 мм и 8 мм;
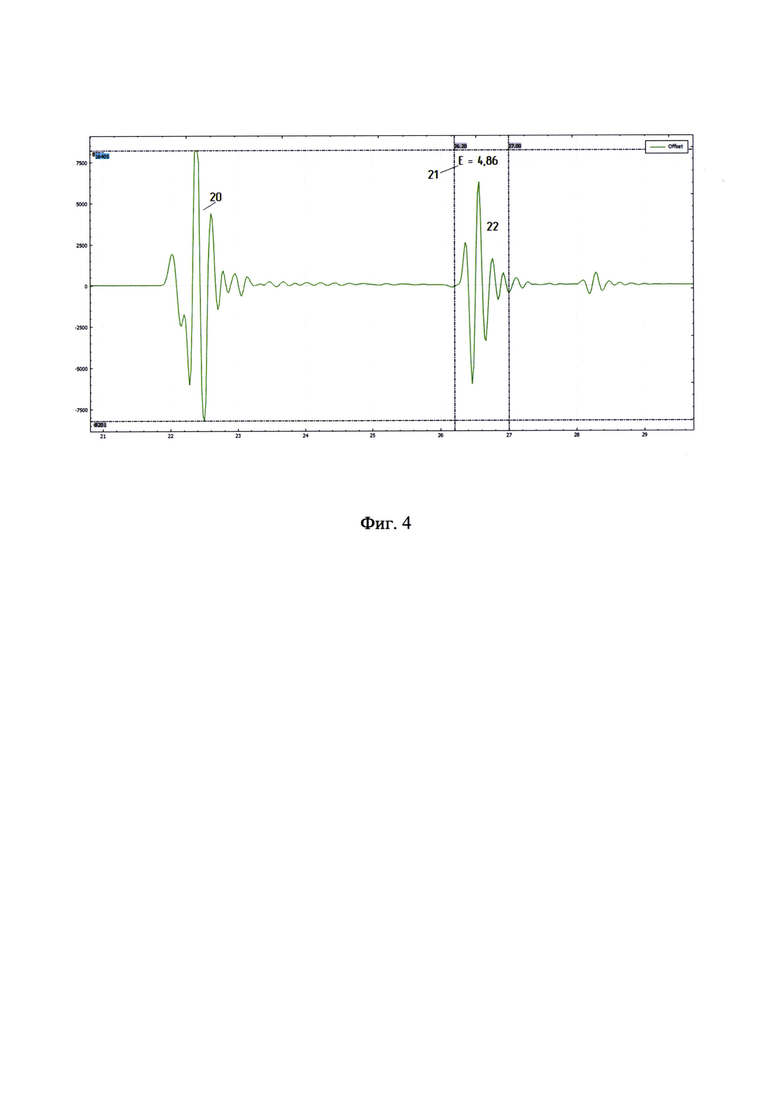
на фиг. 4 изображена осциллограмма эхо-сигнала, полученная при ультразвуковом озвучивании металлической пластины толщиной 12 мм без имитаторов питтингов;
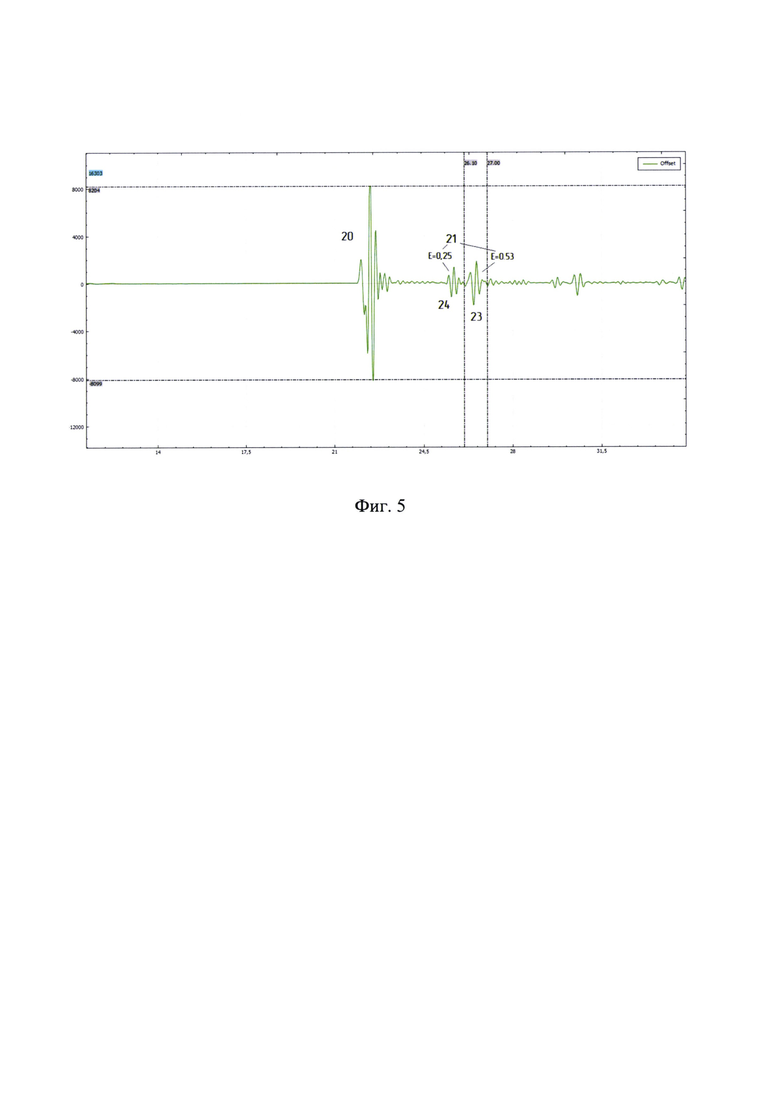
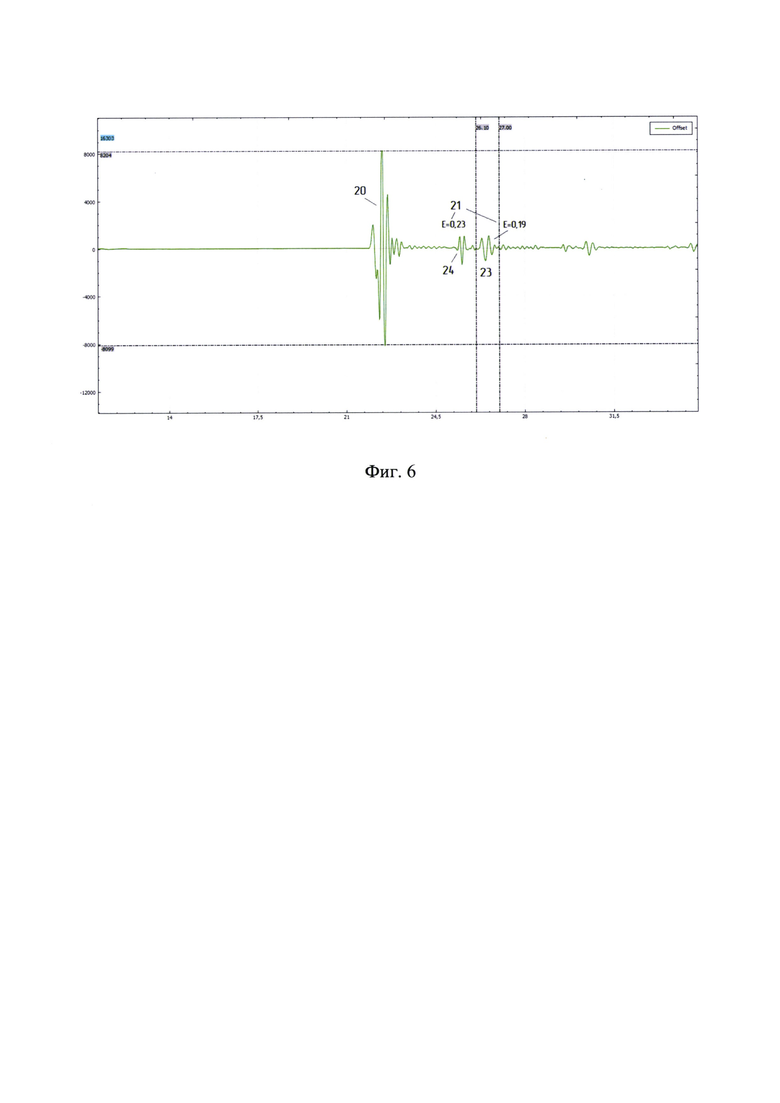
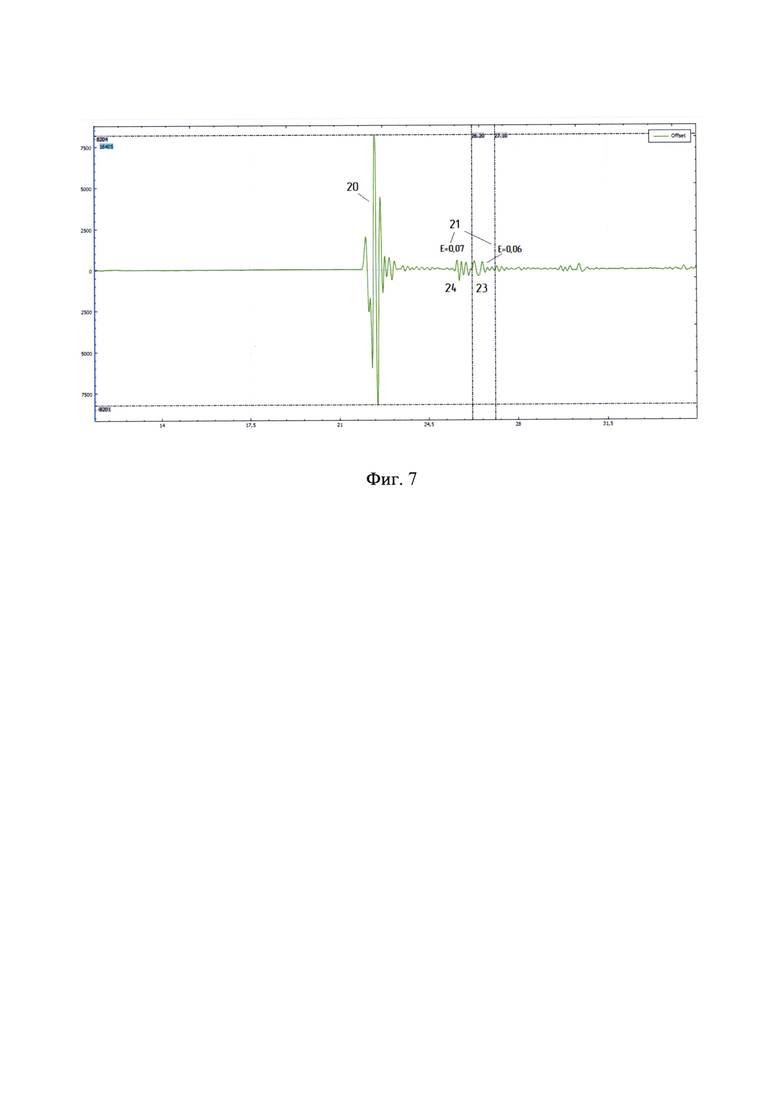
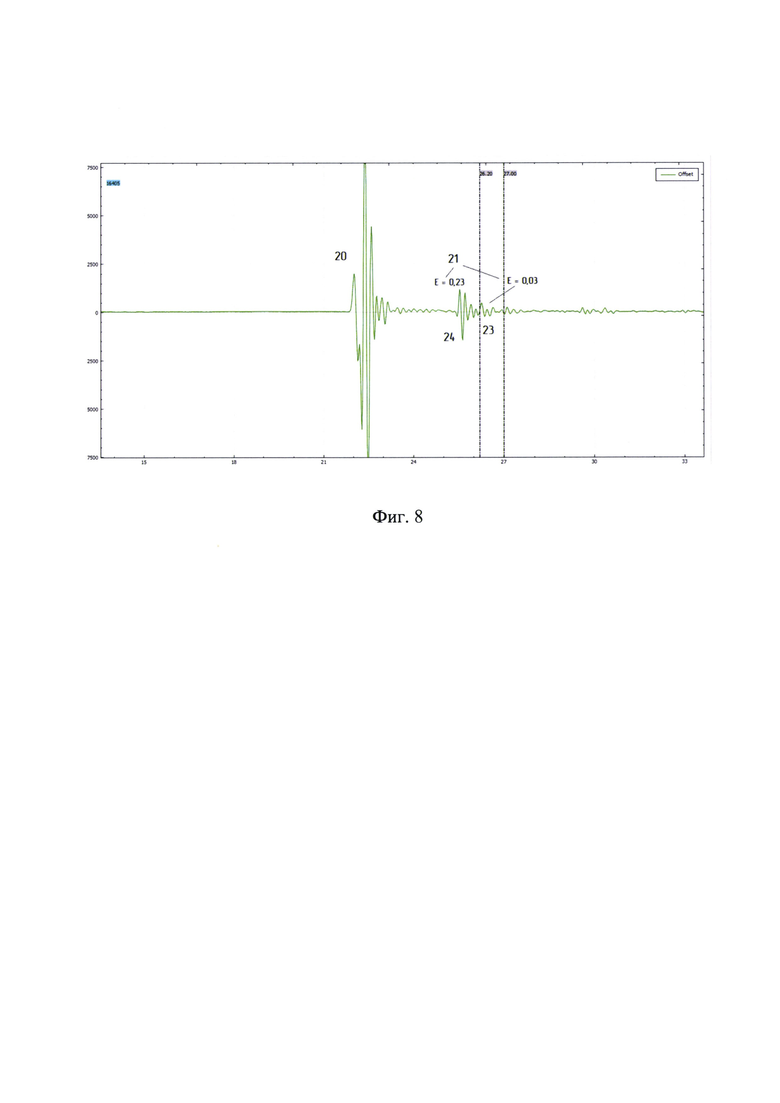
на фиг. 5-8 изображены осциллограммы эхо-сигналов, полученные при ультразвуковом озвучивании металлической пластины толщиной 12 мм с имитаторами питтингов диаметром 1,3 мм, 2,0 мм, 3,2 мм, 4,0 мм, соответственно. Глубина имитаторов питтингов составляет 2,0…2,5 мм.
На фиг. 1-8 приняты следующие обозначения:
1 - пьезоэлектрический преобразователь (ПЭП);
2 - полоз носителя ПЭП;
3 - стенка трубопровода;
4 - питтинг;
5 - зона озвучивания на внешней поверхности стенки трубопровода;
6 - зона озвучивания на внутренней поверхности стенки трубопровода;
7 - иммерсионная среда;
8 - прямой ультразвуковой сигнал;
9 - отраженный ультразвуковой сигнал;
10 - диаграмма направленности ПЭП;
11 - внутренняя поверхность стенки трубопровода;
12 - внешняя поверхность стенки трубопровода;
13 - зона затенения питтингом;
14 - диаметр питтинга;
15 - диаметр зоны озвучивания стенки трубопровода;
16 - координата К (коэффициент относительного затенения зоны озвучивания);
17 - координата Dp (Dp - диаметр питтинга, в мм);
18 - график расчетной зависимости относительного затенения зоны озвучивания от диаметра питтинга для зоны озвучивания диаметром 6 мм;
19 - график расчетной зависимости относительного затенения зоны озвучивания от диаметра питтинга для зоны озвучивания диаметром 8 мм;
20 - эхо-сигнал от внутренней (по отношению к направлению прямых ультразвуковых сигналов) поверхности пластины (первый эхо-сигнал);
21 - величина энергии;
22 - эхо-сигнал от внешней поверхности стенки трубопровода (второй эхо-сигнал);
23 - эхо-сигнал от внешней поверхности пластины с наличием имитатора питтинга в зоне озвучивания (третий эхо-сигнал);
24 - эхо-сигнал от плоской вершины имитатора питтинга.
Технический результат реализуется способом, который основан на иммерсионном методе ультразвуковой толщинометрии, заключающийся в особенности распространения ультразвукового импульса в жидких и твердых средах, а также его отражения от границы раздела сред. В иммерсионном методе ультразвуковые импульсы излучаются и принимаются пьезоэлектрическими преобразователями 1 (фиг. 1), закрепленными на полозе носителя ПЭП 2, и до объекта озвучивания распространяются через иммерсионную среду 7, которая представляет собой перекачиваемую по трубопроводу жидкость. Для определения толщины стенки трубопровода 3 ПЭП 1 располагаются по всей окружности стенки трубопровода 3 на полозе носителя ПЭП 2, при этом акустические оси ПЭП 1 расположены нормально к оси трубопровода. Ультразвуковые импульсы, образуя прямые ультразвуковые сигналы 8 и отраженные ультразвуковые сигналы 9, кроме решения задач толщинометрии используют для обнаружения питтинга 4 на внутренней поверхности 11 или внешней поверхности 12 стенки трубопровода 3.
Конструкция носителя ПЭП 1 (фиг. 1) обеспечивает расположение излучающей и принимающей поверхности ПЭП на некотором фиксированном расстоянии от внутренней поверхности стенки трубопровода 11. Диаграмма направленности 10 ПЭП 1 обеспечивает формирование зон озвучивания 5, 6 на стенках трубопровода.
Полость между ПЭП 1 и внутренней поверхностью стенки трубопровода 11 заполнена иммерсионной средой 7. Ультразвуковой импульс, излученный ПЭП 1, достигает до поверхностей стенки трубопровода 3. После частичного отражения от дефекта на внутренней поверхности 11 или внешней поверхности 12 стенки трубопровода отраженные ультразвуковые сигналы 9 поступают в ПЭП 1, где они преобразуются в электрический сигнал.
При этом процесс генерации запускающего импульса и прием отраженных эхо-сигналов осуществляют через некоторый постоянный интервал дистанции - скан, который вырабатывает электронная аппаратура, расположенная в секции электроники устройства ультразвуковой толщинометрии (на фиг. 1-8 не показана). С помощью электронной аппаратуры усиливают, оцифровывают и передают в бортовой вычислитель (на фиг. 1-8 не показан) по каждому ПЭП 1 оцифрованную осциллограмму (фиг. 4-8) принятого эхо-сигнала, где производят формирование А-скана путем накопления и усреднения оцифрованных осциллограмм, полученных за N циклов озвучивания в этом скане (N - целое число, равное или более двух).
Затем в бортовом вычислителе производят:
- измерение интервала времени между фронтом излученного прямого ультразвукового сигнала 8 и фронтом принятого отраженного ультразвукового сигнала 9 от внутренней поверхности стенки трубопровода 11 (первый эхо-сигнал);
- вычисление энергии первого эхо-сигнала;
- измерение интервала времени между фронтом первого эхо-сигнала и фронтом принятого отраженного эхо-сигнала от внешней поверхности стенки трубопровода 12 (второй эхо-сигнал);
- вычисление величины энергии второго эхо-сигнала;
- сравнение величины энергии второго эхо-сигнала, текущего А-скана с величинами энергий вторых эхо-сигналов предыдущих А-сканов;
- обнаружение третьего эхо-сигнала, в интервале между первым и вторым эхо-сигналами;
- при наличии третьего эхо-сигнала вычисление величины энергии третьего эхо-сигнала;
- измерение временного интервала между максимумами энергий второго и третьего эхо-сигналов.
Практическую реализацию данного способа осуществляют путем доработки трактов обработки сигналов существующих внутритрубных дефектоскопов, работающих в режиме измерения толщины стенки. Доработка может осуществляться добавлением к традиционному тракту обработки сигнала параллельного канала, реализующего предложенный энергетический метод обнаружения питтинга.
Заявленный способ отличается от способа-прототипа тем, что при попадании питтинга 4 в зоны озвучивания 5,6 происходит затенение питтингом части зоны озвучивания на внешней поверхности стенки 12 или на внутренней поверхности стенки 11 трубопровода, уменьшая энергию отраженного эхо-сигнала.
На фиг. 2 показана зона затенения питтингом 13 части площади зоны озвучивания на внешней поверхности стенки трубопровода 5, причем диаметр питтинга 14 меньше диаметра зоны озвучивания стенки трубопровода 15, что типично при питтинговой коррозии.
Третий эхо-сигнал может сформироваться в интервале между первым и вторым эхо-сигналами при отражении энергии ультразвукового импульса от плоской вершины или дна питтинга 4. Уменьшение величины энергии второго эхо-сигнала пропорциональна площади питтинга с диаметром питтинга 14 (фиг. 2), который находится в зоне озвучивания с диаметром 15 (фиг. 2) на внешней поверхности стенки трубопровода 12 или на внутренней поверхности стенки трубопровода 11.
На фиг. 3 приведены графики расчетных зависимостей 18, 19, построенные в координатах «коэффициент относительного затенения 16 - диаметр питтинга 17» для двух диаметров зон озвучивания 6 мм и 8 мм.
Коэффициент относительного затенения определяют по формуле:

где K - коэффициент относительного затенения;
 - площадь зоны озвучивания, мм2;
- площадь зоны озвучивания, мм2;
 - площадь зоны затенения питтингом, мм2.
- площадь зоны затенения питтингом, мм2.
Учитывая, что питтинги могут иметь разнообразные формы, уровень отраженных сигналов может быть соизмерим с шумом приемного тракта, поэтому для обнаружения малых сигналов необходимо применять когерентное накопление N оцифрованных осциллограмм эхо-сигналов в одном А-скане с последующим усреднением. Это позволит увеличить отношение сигнал/шум и с большой вероятностью обнаруживать эхо-сигналы от питтингов. При наличии третьего эхо-сигнала глубину питтинга определяют по формуле:

где Hpt - глубина питтинга, мм;
V - скорость ультразвука в металле, мм/с;
t - временной интервал между максимумами энергий эхо-импульсов второго 22 и третьего эхо-сигналов 23.
Энергию эхо-импульсов принятых эхо-сигналов рассчитывают по формулам:
где Ai - амплитуда эхо-сигнала в i-ом шаге дискретизации, В;
Та - ширина окна анализа эхо-сигнала (время анализа, в течение которого производится вычисление энергии эхо-сигнала), с;
Fs - частота ультразвукового сигнала озвучивания, с-1;
i=1…m - число отсчетов в окне анализа;
δ - шаг дискретизации эхо-сигнала, с;
р - коэффициент, определяющий ширину окна анализа.
Для уменьшения погрешностей от дискретизации эхо-сигнала частота дискретизации должна быть в 8 - 10 раз выше рабочей частоты ПЭП. Коэффициент р изменяют при настройке системы для выбора оптимальной ширины окна анализа.
В процессе приема и дискретизации эхо-сигналов в одном скане происходит формирование N массивов (осциллограмм) эхо-сигналов, которые запоминаются в бортовом вычислителе. Далее производится когерентное накопление и усреднение N массивов и формирование одного А-скана. В полученном А-скане формируется скользящее окно (окно анализа), включающее m - дискретных значений, в котором производится вычисление энергии Е по формуле (3). Полученное значение записывается в память вычислителя с временем прихода равному середине окна анализа. Далее окно сдвигается на один шаг квантования δ эхо-сигнала и процесс вычисления энергии с записью в бортовой вычислитель повторяется. После завершения процесса вычисления энергии на всем временном интервале озвучивания, производится поиск максимумов энергии в полученном «энергетическом» А-скане, которые являются энергетическими центрами эхо-сигналов от внутренней поверхности стенки трубопровода 11 и от внешней поверхности стенки трубопровода 12, а при наличии питтинга 4 - эхо-сигнала от его плоской вершины. Все полученные данные записываются в бортовой накопитель для дальнейшего анализа.
Энергетический критерий эффективно работает даже при амплитудном отношении сигнал/шум равным 1, так как спектральная плотность шума в окне анализа Та будет меньше спектральной плотности при наличии в окне анализа сигнала с шумом. Это объясняется тем, что ширина окна анализа эхо-сигнала Та оптимально выбрана для приема эхо-сигнала. Например, при частоте зондирующего прямого ультразвукового сигнала 4 МГц (Ts=0,25 мкс) максимальная ширина окна анализа Та составит 0,5 мкс. Кроме того, в энергетическом способе применение когерентного накопления N массивов эхо-сигналов дополнительно увеличивает отношение сигнал/шум.
В общем случае, ширина окна анализа Та определяется соотношением (4) исходя из частоты ультразвукового сигнала и коэффициента р, величина которого определяется степенью демпфирования кристалла ПЭП.
В настоящее время ПЭП для толщинометрии во внутритрубной диагностике работают на частотах от 2 МГц до 10 МГц.
Способ обнаружения питтинга заключается в сравнении значения энергии эхо-сигналов в предыдущих А-сканах с соответствующими значениями энергий, полученными в последнем скане. При наличии питтинга 4, например, на внешней поверхности стенки трубопровода 12 энергия эхо-сигнала от внутренней поверхности стенки трубопровода 11 не изменится, а энергия эхо-сигнала от внешней поверхности стенки трубопровода 12 в результате затенения питтингом 4 уменьшится пропорционально увеличению диаметру питтинга 14. При наличии третьего эхо-сигнала можно определить глубину питтинга по формуле (2).
Осциллограммы эхо-сигналов (фиг. 4-8) иллюстрируют реализацию предлагаемого способа на примере эксперимента по обнаружению питтинга в металлической пластине толщиной 12 мм без питтинга и с нанесенными на ней имитаторами питтингов разных диаметров. (1,3 мм, 2,0 мм, 3,2 мм, 4,0 при постоянной глубине имитаторов питтингов, равной 2,0…2,5 мм).
При отсутствии имитатора питтинга значения энергии эхо-сигнала от внутренней поверхности пластины 20 и эхо-сигнала от внешней поверхности пластины 22 практически не отличаются друг от друга (фиг. 4), так как отсутствует зона затенения питтингом 13.
На осциллограммах эхо-сигналов (фиг. 5-8) четко фиксируется эхо-сигнал от плоской вершины имитатора питтинга 24, что позволяет определять местоположение дефекта. Величина энергии 21 эхо-сигнала от внешней поверхности пластины с наличием имитатора питтинга в зоне озвучивания 23 пропорционально уменьшается с увеличением диаметра имитатора питтинга, что позволяет определять размер дефекта.
Анализ результатов экспериментов показывает, что предложенный способ обнаружения питтинговой коррозии, основанный на энергетическом анализе эхо-сигналов, позволяет обнаруживать питтинги, которые не определяются известными способами ультразвуковой толщинометрии, и определять их глубину.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения толщины стенки трубопровода в зоне дефекта типа "потеря металла" на основе статистической стабилизации параметров сигнала по данным ультразвуковой секции WM | 2018 |
|
RU2687846C1 |
| СПОСОБ УЛЬТРАЗВУКОВОЙ ТОЛЩИНОМЕТРИИ С ВЫСОКИМ РАЗРЕШЕНИЕМ | 2014 |
|
RU2554323C1 |
| Способ определения сигнала от стенки трубы по данным ВИП CD статистики энергетических линий | 2018 |
|
RU2690975C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОЙ НАРУЖНОЙ ДИАГНОСТИКИ ТРУБОПРОВОДА И АВТОМАТИЗИРОВАННЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2757203C1 |
| Способ изготовления стенда сухой протяжки для проверки работоспособности внутритрубных инспекционных приборов на испытательном трубопроводном полигоне | 2017 |
|
RU2653138C1 |
| Способ бесконтактной ультразвуковой дефектоскопии с использованием эффекта Доплера | 2019 |
|
RU2722089C1 |
| Способ ультразвукового контроля локальных участков рельсов | 2023 |
|
RU2823665C1 |
| Способ высокоскоростной ультразвуковой дефектоскопии с использованием эффекта Доплера | 2019 |
|
RU2720043C1 |
| Способ внутритрубного ультразвукового контроля сварных швов | 2016 |
|
RU2621216C1 |
| Способ ультразвукового контроля зоны болтовых стыков рельсов | 2022 |
|
RU2791145C1 |
Использование: для обнаружения питтинговой коррозии (питтинга) в контролируемых изделиях методом направленных акустических волн. Сущность изобретения заключается в том, что с помощью ультразвуковых пьезоэлектрических преобразователей, предназначенных для проведения ультразвуковой толщинометрии стенки трубопровода, осуществляют генерацию запускающего импульса и прием отраженных эхо-сигналов через постоянный интервал дистанции - скан, усиливают, оцифровывают и передают в бортовой вычислитель по каждому пьезоэлектрическому преобразователю оцифрованную осциллограмму принятого эхо-сигнала, производят накопление и усреднение оцифрованных осциллограмм за два и более цикла озвучивания в каждом скане, измеряют интервал времени между фронтом излученного прямого ультразвукового сигнала и фронтом принятого отраженного ультразвукового сигнала от внутренней поверхности стенки трубопровода, образующий первый эхо-сигнал, вычисляют энергию первого эхо-сигнала, измеряют интервал времени между фронтом первого эхо-сигнала и фронтом принятого отраженного эхо-сигнала от внешней поверхности стенки трубопровода, образующий второй эхо-сигнал, вычисляют энергию второго эхо-сигнала, сравнивают величину энергии второго эхо-сигнала текущего А-скана с величинами энергий вторых эхо-сигналов предыдущих А-сканов, обнаруживают третий эхо-сигнал, в интервале между первым и вторым эхо-сигналами, при наличии третьего эхо-сигнала вычисляют энергию третьего эхо-сигнала, измеряют временной интервал между максимумами энергий второго и третьего эхо-сигналов, определяют глубину питтинга. Технический результат: обеспечение возможности обнаружения питтинговой коррозии ультразвуковыми преобразователями, предназначенными для проведения ультразвуковой толщинометрии стенки трубопровода. 2 з.п. ф-лы, 8 ил.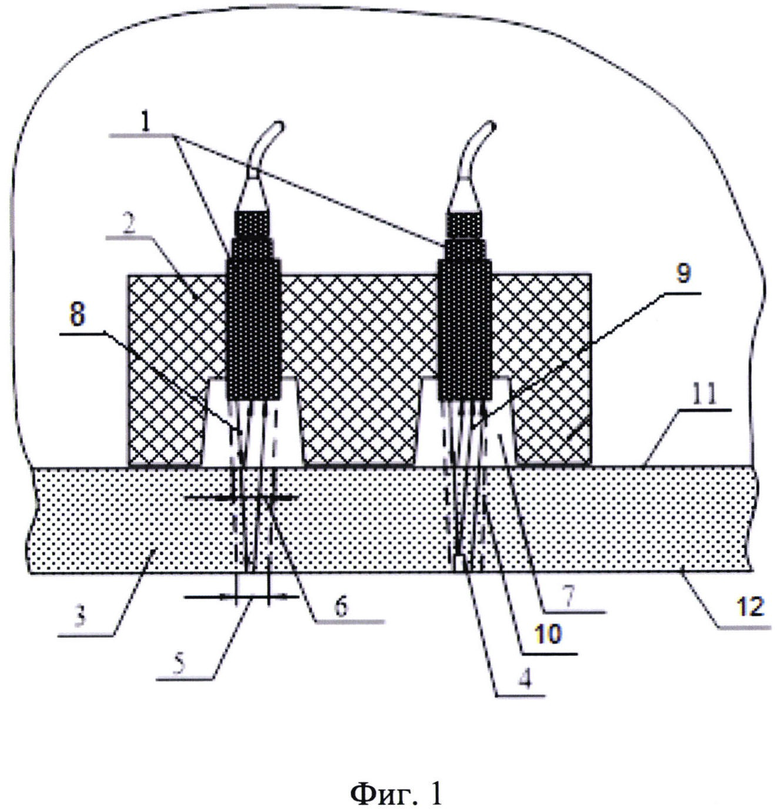
1. Способ обнаружения питтинговой коррозии с помощью ультразвуковых пьезоэлектрических преобразователей, предназначенных для проведения ультразвуковой толщинометрии стенки трубопровода, отличающийся тем, что осуществляют генерацию запускающего импульса и прием отраженных эхо-сигналов через постоянный интервал дистанции - скан, усиливают, оцифровывают и передают в бортовой вычислитель по каждому пьезоэлектрическому преобразователю оцифрованную осциллограмму принятого эхо-сигнала, производят накопление и усреднение оцифрованных осциллограмм за два и более цикла озвучивания в каждом скане, измеряют интервал времени между фронтом излученного прямого ультразвукового сигнала и фронтом принятого отраженного ультразвукового сигнала от внутренней поверхности стенки трубопровода, образующий первый эхо-сигнал, вычисляют энергию первого эхо-сигнала, измеряют интервал времени между фронтом первого эхо-сигнала и фронтом принятого отраженного эхо-сигнала от внешней поверхности стенки трубопровода, образующий второй эхо-сигнал, вычисляют энергию второго эхо-сигнала, сравнивают величину энергии второго эхо-сигнала текущего А-скана с величинами энергий вторых эхо-сигналов предыдущих А-сканов, обнаруживают третий эхо-сигнал, в интервале между первым и вторым эхо-сигналами, при наличии третьего эхо-сигнала вычисляют энергию третьего эхо-сигнала, измеряют временной интервал между максимумами энергий второго и третьего эхо-сигналов, определяют глубину питтинга.
2. Способ по п. 1, отличающийся тем, что применяют когерентное накопление оцифрованных осциллограмм эхо-сигналов в одном А-скане с последующим усреднением.
3. Способ по п. 1, отличающийся тем, что формируют на А-скане скользящее окно анализа Та, ширина которого определяется исходя из частоты ультразвукового сигнала по соотношению:
Та=р×1/FS,
где р - коэффициент, определяющий ширину окна анализа, равный 0,5…2,0;
Fs - частота ультразвукового сигнала озвучивания, с-1.
4. Способ по п. 1, отличающийся тем, что вычисляют энергию эхо-сигналов с последующим определением максимумов энергии.
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ КОРРОЗИИ МЕТАЛЛИЧЕСКИХ СООРУЖЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2536779C1 |
| СПОСОБ УЛЬТРАЗВУКОВОЙ ТОЛЩИНОМЕТРИИ С ВЫСОКИМ РАЗРЕШЕНИЕМ | 2014 |
|
RU2554323C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ТРУБОПРОВОДОВ | 2003 |
|
RU2312334C2 |
| US 8806944 B2, 19.08.2014 | |||
| US 4641529 A, 10.02.1987. | |||

