Изобретение относится к области контроля и диагностирования систем автоматического управления и их элементов.
Известен способ поиска неисправного блока в непрерывной динамической системе (Способ поиска неисправного блока в непрерывной динамической системе: пат. 2439647 Рос. Федерация: МПК7 G05B 23/02 (2006.01) / Шалобанов С.В., Шалобанов С.С. - №2011100409/08; заявл. 11.01.2011; опубл. 10.01.2012, бюл. №1).
Недостатком этого способа является то, что он использует вычисление знаков передач сигналов от выходов блоков до контрольных точек.
Наиболее близким техническим решением (прототипом) является способ поиска неисправного блока в динамической системе (Способ поиска неисправного блока в динамической системе: пат. 2435189 Рос. Федерация: МПК7 G05B 23/02 (2006.01) / Шалобанов С.В., Шалобанов С.С. - №2009123999/08; заявл. 23.06.2009; опубл. 27.11.2011, бюл. №33).
Недостатком этого способа является то, что он использует задание величин относительных отклонений параметров передаточных функций для моделей с пробными отклонениями.
Технической задачей, на решение которой направлено данное изобретение, является уменьшение сложности технических расчетов подготовки систем диагностирования, уменьшение зависимости алгоритма диагностирования дефектов от априорной информации об объекте и уменьшение аппаратных и вычислительных затрат, связанных с реализацией вычисления диагностических признаков наличия дефекта.
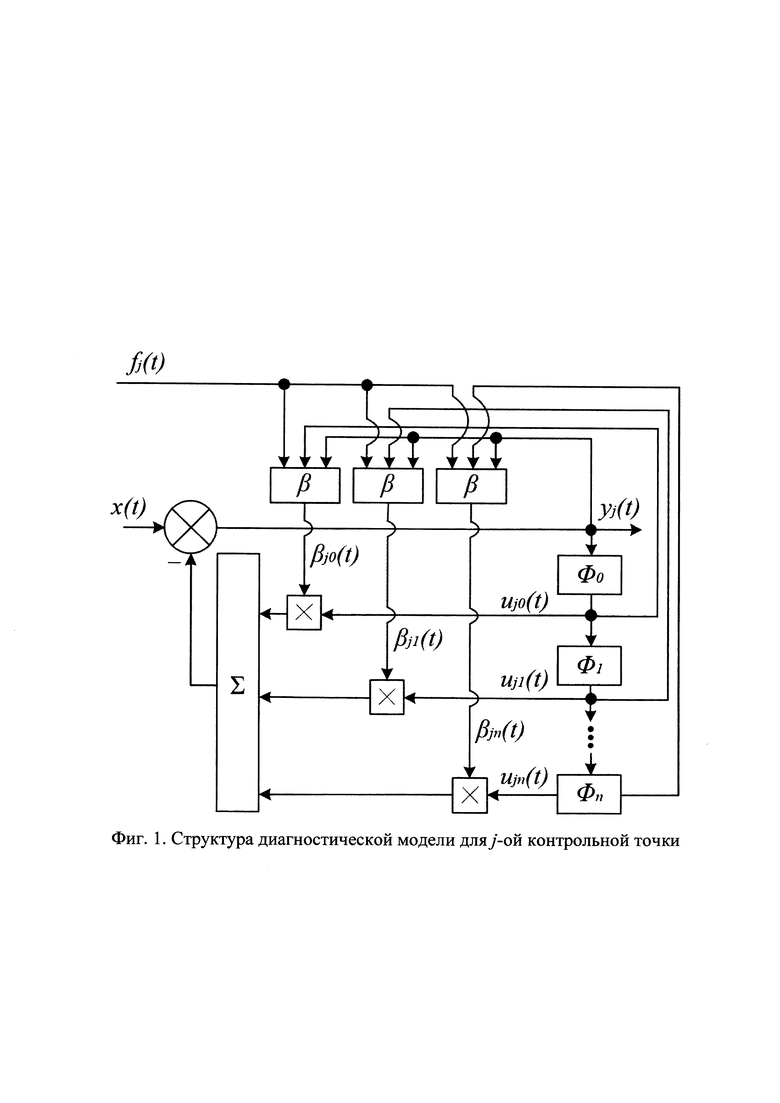
Поставленная задача достигается тем, что определяют число блоков m, входящих в состав системы, для которых планируется определять дефектные состояния, определяют время контроля ТК≥ТПП, где ТПП - время переходного процесса системы, фиксируют число к контрольных точек системы с которых будут сниматься выходные сигналы fj(t) j=1, …, k объекта диагностирования. К каждой контрольной точке подключаются настраиваемые диагностические модели на ортогональных фильтрах Лагерра, которые строятся согласно рекурсивному подходу по схеме на рисунке (см. фиг. 1. Структура диагностической модели для j-ой контрольной точки), где β - контуры градиентной настройки; x(t) - входной сигнал, подаваемый на вход настраиваемых диагностических моделей и объекта; yj(t) - выходной сигнал диагностической модели на ортогональных фильтрах, а сами фильтры строятся из n последовательно соединенных блоков с передаточными функциями Фi(t) i=0, …, n-1 согласно следующим выражениям:

Предварительно проводится процедура настройки внутренних параметров (а - изменяемый коэффициент в контурах самонастройки коэффициентов βji(t), являющихся коэффициентами усиления сигнала для каждой выходной ветви системы фильтров Лагерра и определяются путем подачи на блок интегрирования произведения двух сигналов согласно выражению:

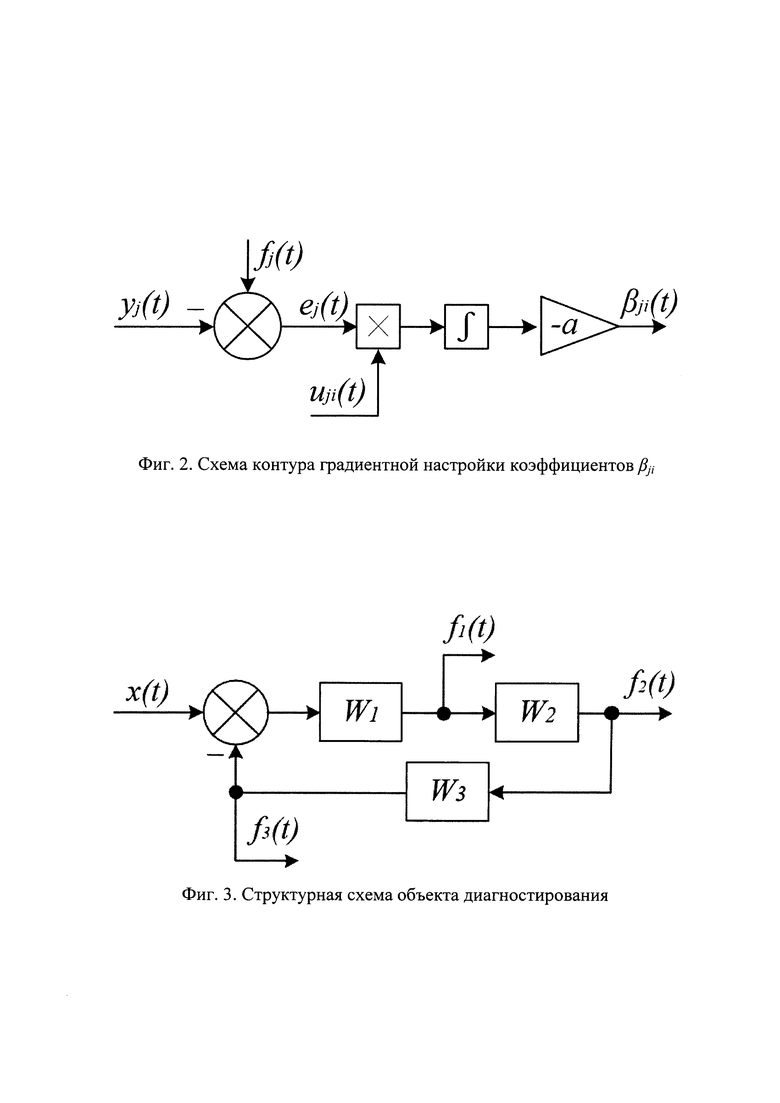
где uji(t) - выходной сигнал i-го блока фильтра Лагерра j-ой контрольной точки, ej(t) - сигнал ошибки подстройки диагностической модели к объекту для j-ой контрольной точки; n - количество используемых блоков в системе фильтров; b - параметр в передаточной функции отдельного блока в системе фильтров). Настройка состоит в итерационной подстройке каждого параметра для достижения минимального времени установки коэффициентов βji(t) в константу, где каждый коэффициент βji(t) настраивается согласно градиентному методу (см. фиг. 2. Схема контура градиентной настройки коэффициентов βji(t)), для чего выходы с контрольных точек объекта fj(t) и выходы соответствующих диагностических моделей yj(t) подаются на сумматоры с одним не инвертирующим и одним инвертирующим входом, с выходов сумматоров снимается сигнал ошибки подстройки диагностической модели к объекту ej(t), затем сигнал ошибки подается на блоки перемножения с сигналами от ветви каждого блока в системе фильтров Лагерра для каждой контрольной точки uji(t), с выходов блоков перемножения сигналы подаются на интеграторы и усилители сигналов с коэффициентами - а, на выходе усилителей формируются коэффициенты βji(t). Далее определяются q наборов коэффициентов βji(t) дефектных технических состояний исследуемого объекта, соответствующих одиночным блочным дефектам, и один набор коэффициентов для исправного состояния, которые составляются из установившихся за время контроля ТК наборов коэффициентов βji(t) блоков фильтров Лагерра для каждого рассматриваемого состояния путем тестового введения объекта в одно из дефектных, которые предполагается определять, и исправного технических состояний с подключенными диагностическими моделями на ортогональных фильтрах к выбранным контрольным точкам. Все вышеописанные действия проводятся один раз для каждого рассматриваемого объекта диагностирования. После чего для поиска дефектов в рассматриваемом объекте определяется набор коэффициентов βji(t), соответствующий текущему техническому состоянию рассматриваемого объекта, затем определяются диагностические признаки Jl, где l=1, …, q для каждого дефектного технического состояния, соответствующих q созданным наборам коэффициентов βji(t), согласно выражению:

где р=1, …, n*k; Yp - значение для каждого из n коэффициентов βji(t) для текущего технического состояния объекта диагностирования для каждой из k контрольных точек; Zl,p - значение для каждого из n коэффициентов βji(t) для  рассматриваемого дефекта для каждой из k контрольных точек; Np - значение для каждого из n коэффициентов βji(t) для исправного состояния объекта диагностирования для каждой из k контрольных точек, по минимуму значения диагностического признака определяется к какому из q технических состояний ближе текущее состояние объекта.
рассматриваемого дефекта для каждой из k контрольных точек; Np - значение для каждого из n коэффициентов βji(t) для исправного состояния объекта диагностирования для каждой из k контрольных точек, по минимуму значения диагностического признака определяется к какому из q технических состояний ближе текущее состояние объекта.
Таким образом, предлагаемый способ поиска неисправного блока сводится к выполнению следующих операций:
1. В качестве объекта диагностирования рассматривают динамическую систему, состоящую из m произвольно соединенных динамических блоков;
2. Предварительно определяют время контроля ТК≥ТПП, где ТПП - время переходного процесса системы. Время переходного процесса оценивают для номинальных значений параметров рассматриваемого объекта;
3. Фиксируют k контрольных точек объекта диагностирования;
4. Для объекта диагностирования и диагностических моделей используют входной сигнал x(t) на интервале t∈[0,TK], регистрируют реакцию заведомо исправной системы fj ном(t), j=1, …, k на интервале t∈[0, Тк] в k контрольных точках;
5. К каждой контрольной точке подключают настраиваемые диагностические модели на ортогональных фильтрах Лагерра, которые строятся согласно рекурсивному подходу, а фильтры строятся из n последовательно соединенных блоков;
6. Предварительно проводится процедура настройки внутренних параметров диагностических моделей, которая состоит в итерационной подстройке каждого параметра для достижения минимального времени установки коэффициентов βji(t) в константу, где каждый коэффициент βji(t) настраивается согласно градиентному методу, для чего выходы с контрольных точек объекта и выходы соответствующих диагностических моделей подаются на сумматоры с одним не инвертирующим и одним инвертирующим входом, с выходов сумматоров снимается сигнал ошибки подстройки диагностической модели к объекту, затем сигнал ошибки подается на первые входы блоков перемножения, на вторые входы блоков перемножения подаются сигналы с выходов каждого блока в системе фильтров Лагерра каждой контрольной точки, выходные сигналы блоков перемножения подаются на входы интеграторов, выходные сигналы интеграторов подаются на входы усилителей сигналов с коэффициентами усиления равными - а, на выходе усилителей формируются коэффициенты βji(t);
7. Предварительно определяются q наборов коэффициентов βji(t) для дефектных технических состояний исследуемого объекта, соответствующих одиночным блочным дефектам, и один набор коэффициентов для исправного состояния, которые составляются из установившихся со временем наборов коэффициентов βji(t) фильтров Лагерра путем тестового введения объекта в одно из дефектных и исправное технические состояния с подключенными настраиваемыми диагностическими моделями на ортогональных фильтрах;
8. Описанные в пунктах 6 и 7 действия проводятся предварительно один раз для каждого рассматриваемого объекта диагностирования;
9. Затем определяется набор коэффициентов βji(t), соответствующий текущему техническому состоянию рассматриваемого объекта;
10. Определяются диагностические признаки Jl для каждого из q предварительно созданных наборов коэффициентов βji(t) дефектных технических состояний;
11. По минимуму значения диагностического признака определяется дефектное техническое состояние.
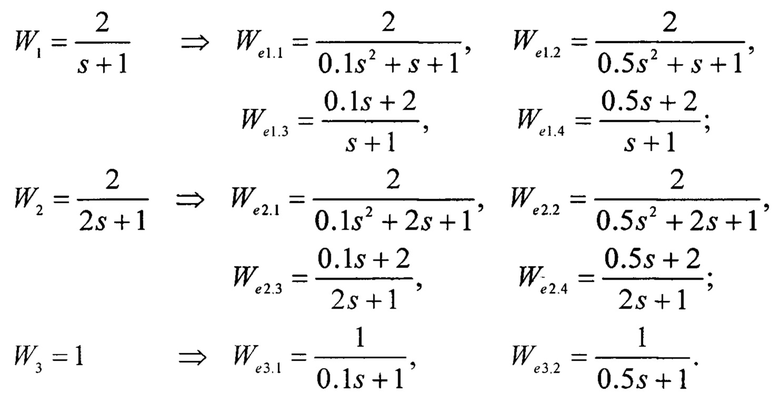
Рассмотрим пример реализации предлагаемого способа поиска блочного дефекта в непрерывной динамической системе. Структурная схема объекта диагностирования, составленного из трех динамических блоков представлена на рисунке (см. фиг. 3. Структурная схема объекта диагностирования). x(t) - входной сигнал для объекта и диагностических моделей, подключенных к k=3 контрольным точкам с сигналами f1(t), f2(t) и f3(t), который имеет синусоидальную форму с частотой 0.3 рад/с (частота выбрана, так чтобы период колебаний был примерно соизмерим со временем переходного процесса объекта). Передаточные функции блоков W1, W2 и W3 заданы следующими выражениями:

Следующий шаг - настройка диагностических моделей. Количество используемых блоков в системе фильтров целесообразно выбирать равным или большим порядку рассматриваемого объекта. Параметр b в передаточной функции отдельного блока в системе фильтров целесообразно выбирать близким к обратному значению общей постоянной времени объекта. В ходе итерационной подстройки параметров диагностических моделей были выбраны следующие значения:
n=4; b=0.4; а=22,
обеспечивающие наиболее точную настройку моделей и минимальное время установки коэффициентов βji(t) в константу, равное 40 с. Далее определим дефектные технические состояния. Рассмотрим несколько блочных дефектов в каждом динамическом блоке объекта, для которых будут определяться наборы коэффициентов βji(t):
Путем тестового поочередного введения рассматриваемых дефектов определим 11 наборов коэффициентов βji(t), соответствующих техническим состояниям (q=10 дефектных и 1 исправное), каждый из которых состоит из 12 (n*k) установившихся в константу коэффициентов βji(t) фильтров Лагерра для каждой контрольной точки.
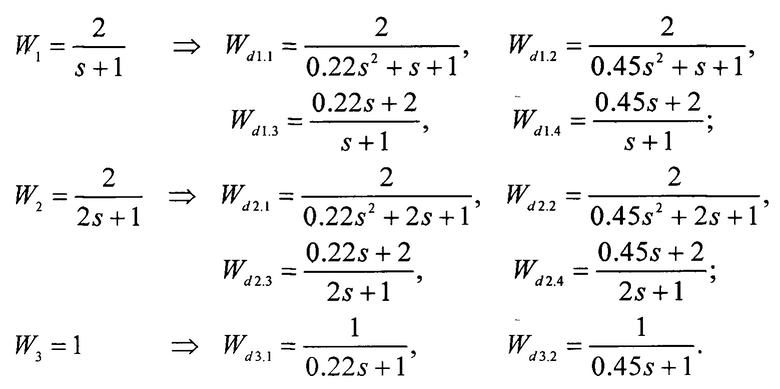
Для поиска дефекта необходимо определить набор коэффициентов βji(t), соответствующий текущему техническому состоянию. Были рассмотрены следующие блочные дефекты, для которых определялись наборы коэффициентов βji(t):
Для каждого рассматриваемого технического состояния определяются диагностические признаки Jl для каждого из q созданных наборов коэффициентов βji(t) дефектных технических состояний. Значения полученных признаков Jl показаны в таблице 1, в которой приведены первые три минимальных значения.
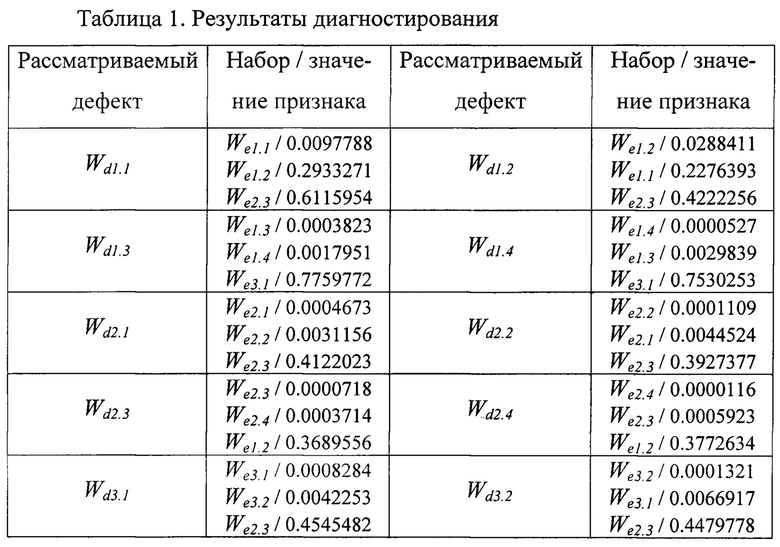
По минимуму значения диагностического признака определяется дефектное техническое состояние объекта. В данном примере минимальное значение диагностического признака во всех случаях правильно указывает на дефектный блок. В среднем различимость (разница между значением признака искомого дефекта и минимальным значением признака дефекта, не являющегося искомым) блочного дефекта составляет 0.479. Также результаты диагностирования показывают возможность применения предлагаемого метода для поиска параметрических дефектов внутри блока, но с гораздо меньшей различимостью.
Изобретение относится к измерительной технике. Согласно способу определяют число блоков, входящих в состав системы, для которых планируется определять дефектные состояния, определяют время контроля, фиксируют число контрольных точек системы, с которых будут сниматься выходные сигналы объекта диагностирования, к каждой контрольной точке подключаются настраиваемые диагностические модели на ортогональных фильтрах Лагерра, которые строятся согласно рекурсивному подходу из последовательно соединенных блоков, предварительно проводится процедура настройки внутренних параметров, настройка состоит в итерационной подстройке каждого параметра для достижения минимального времени установки коэффициентов усиления сигнала для каждой выходной ветви системы фильтров Лагерра в константу, где каждый коэффициент настраивается согласно градиентному методу, для чего выходы с контрольных точек объекта и выходы соответствующих диагностических моделей подаются на сумматоры с одним не инвертирующим и одним инвертирующим входом, с выходов сумматоров снимается сигнал ошибки подстройки диагностической модели к объекту, затем сигнал ошибки подается на блоки перемножения с сигналами от ветви каждого блока в системе фильтров Лагерра для каждой контрольной точки, с выходов блоков перемножения сигналы подаются на интеграторы и усилители сигналов, на выходе усилителей формируются коэффициенты усиления сигнала каждой выходной ветви системы фильтров, далее определяются наборы коэффициентов для дефектных технических состояний исследуемого объекта, соответствующих одиночным блочным дефектам, и один набор коэффициентов для исправного состояния, которые составляются из установившихся за время контроля наборов коэффициентов блоков фильтров Лагерра для каждого рассматриваемого состояния, путем тестового введения объекта в одно из дефектных, которые предполагается определять, и исправное технические состояния с подключенными диагностическими моделями на ортогональных фильтрах к выбранным контрольным точкам, после чего для поиска дефектов в рассматриваемом объекте определяется набор коэффициентов усиления в системе фильтров, соответствующий текущему техническому состоянию рассматриваемого объекта, затем определяются диагностические признаки, по минимуму значения диагностического признака определяется к какому из технических состояний ближе текущее состояние объекта. Технической результат - уменьшение сложности, уменьшение аппаратных и вычислительных затрат. 3 ил.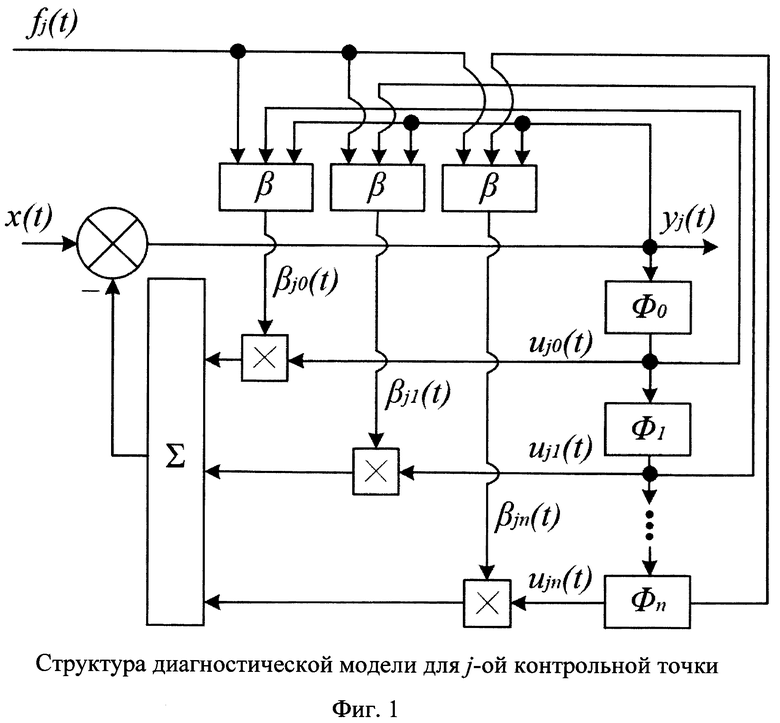
Способ поиска неисправного блока в непрерывной динамической системе, основанный на том, что фиксируют число блоков m, входящих в состав системы, для которых планируется определять дефектные состояния, определяют время контроля ТК≥ТПП, где ТПП - время переходного процесса системы, фиксируют число k контрольных точек системы, для объекта диагностирования и диагностических моделей используют входной сигнал x(t) на интервале t∈[0,ТК], регистрируют реакцию заведомо исправной системы fj ном(t), j=1, …, k на интервале t∈[0,ТК] в k контрольных точках, вычисляют диагностические признаки наличия дефекта, по минимуму диагностического признака определяют дефект, отличающийся тем, что для каждой зафиксированной контрольной точки используются диагностические модели на ортогональных фильтрах Лагерра, которые строятся согласно рекурсивному подходу, а сами фильтры строятся из n блоков с передаточными функциями Ф0=s/(s+b), Фi=(s-b)/(s+b), i=0, …, n-1, предварительно проводится процедура определения трех внутренних параметров настраиваемых диагностических моделей: изменяемого коэффициента а в контурах самонастройки коэффициентов βji(t), являющегося коэффициентом усиления сигнала для каждой выходной ветви системы фильтров Лагерра, n - количества используемых блоков в системе фильтров, параметра b в передаточных функциях блоков в системе фильтров Лагерра, которая состоит в итерационной подстройке каждого параметра для достижения минимального времени установки коэффициентов βji(t) в константу, где каждый коэффициент βji(t) настраивается согласно градиентному методу, для чего выходы с контрольных точек объекта и выходы соответствующих диагностических моделей подаются на сумматоры с одним не инвертирующим и одним инвертирующим входом, с выходов сумматоров снимается сигнал ошибки подстройки диагностической модели к объекту, затем сигнал ошибки подается на первые входы блоков перемножения, на вторые входы блоков перемножения подаются сигналы с выходов каждого блока в системе фильтров Лагерра каждой контрольной точки, выходные сигналы блоков перемножения подаются на входы интеграторов, выходные сигналы интеграторов подаются на входы усилителей сигналов с коэффициентами усиления, равными а, на выходе усилителей формируются коэффициенты βji(t), эти операции производятся для определения q наборов коэффициентов βji(t) дефектных технических состояний контролируемого объекта, соответствующих одиночным блочным дефектам, и одного набора коэффициентов βji(t) для исправного состояния, которые составляются из установившихся к концу времени ТК наборов коэффициентов βji(t) блоков Лагерра для каждого рассматриваемого состояния путем тестового введения объекта в одно из дефектных, которые предполагается определять, и исправное технические состояния с подключенными настраиваемыми диагностическими моделями на ортогональных фильтрах к выбранным контрольным точкам, все вышеописанные действия проводятся предварительно один раз для каждого рассматриваемого объекта диагностирования, после чего для поиска дефектов в рассматриваемом объекте определяется набор коэффициентов βji(t), соответствующий текущему техническому состоянию рассматриваемого объекта, затем определяются диагностические признаки Jl l=1, …, q для каждого дефектного технического состояния, соответствующие q созданным наборам, по минимуму значения диагностического признака определяется, к какому из q технических состояний ближе текущее состояние объекта.
| СПОСОБ ПОИСКА НЕИСПРАВНОГО БЛОКА В ДИНАМИЧЕСКОЙ СИСТЕМЕ | 2009 |
|
RU2435189C2 |
| СПОСОБ ПОИСКА НЕИСПРАВНОСТЕЙ ДИНАМИЧЕСКОГО БЛОКА В НЕПРЕРЫВНОЙ СИСТЕМЕ | 2011 |
|
RU2464616C1 |
| СПОСОБ ПОИСКА НЕИСПРАВНОГО БЛОКА В ДИСКРЕТНОЙ ДИНАМИЧЕСКОЙ СИСТЕМЕ | 2012 |
|
RU2506623C1 |
| Способ поиска топологического дефекта в непрерывной динамической системе на основе введения пробных отклонений | 2016 |
|
RU2616512C1 |
| Устройство для управления бортовыми рулями успокоителя качки судна | 1983 |
|
SU1147636A1 |
| US 4851985 А, 25.07.1989 | |||
| Перегрузочный узел конвейеров | 1988 |
|
SU1537626A1 |

