Изобретение относится к лазерной технике, а именно к лазерной гироскопии.
Известен способ измерения порога статического захвата в лазерном датчике угловой скорости, заключающийся в наложении продольного магнитного поля на активную среду лазера, что создает разность частот встречных волн в отсутствие вращательного движения, эквивалентную угловой скорости вращения датчика. Измеряя ток в соленоидах невзаимного устройства при вхождении в зону статического захвата, определяют порог статического захвата. [1].
Недостатками данного способа измерения порога статического захвата в лазерном датчике угловой скорости являются: большая погрешность измеряемого порога захвата, вызванная неточностью определения минимального значения тока в соленоидах невзаимного устройства, при котором пропадает разность частот встречных волн и гистерезисными явлениями при входе и выходе кольцевого лазера из зоны захвата.
Наиболее близким по технической сущности к предлагаемому способу является способ измерения порога статического захвата в лазерном датчике угловой скорости, включающий создание знакопеременной частотной подставки, выделение и обработку информации о частоте биений встречных волн, и определение масштабного коэффициента. По известным масштабным коэффициентам для различных угловых скоростей вращения получают частотную характеристику. Частотную характеристику аппроксимируют при помощи известной теоретической функции и, по одному из параметров данной функции, определяют порог статического захвата [2].
Недостатками данного способа измерения порога статического захвата в лазерном датчике угловой скорости являются: длительное время сбора данных, необходимых для корректной аппроксимации частотной характеристики, трудоемкая обработка полученных данных, либо использование специализированного программного обеспечения.
Задачей изобретения является сокращение времени и уменьшение трудоемкости процесса измерения порога статического захвата в лазерном датчике угловой скорости за счет сокращения количества требуемых для расчета данных и автоматизации процесса измерения.
Поставленная задача решается тем, что в известном способе измерения порога статического захвата в лазерном датчике угловой скорости, включающем создание знакопеременной частотной подставки, выделение и обработку информации о частоте биений встречных волн, и определение масштабного коэффициента, определяют разность нелинейных искажений масштабного коэффициента и вычисляют порог статического захвата по формуле (1):

где:
ΩL - порог статического захвата в лазерном датчике угловой скорости;
К1 - масштабный коэффициент лазерного датчика угловой скорости при угловой скорости вращения Ω1, много большей угловой скорости вращения Ω0, совпадающей с амплитудой знакопеременной частотной подставки;
К2 - масштабный коэффициент лазерного датчика угловой скорости при угловой скорости вращения Ω2, меньшей угловой скорости вращения Ω0, совпадающей с амплитудой знакопеременной частотной подставки;
К3 - масштабный коэффициент лазерного датчика угловой скорости при угловой скорости вращения Ω3, меньшей угловой скорости вращения Ω2;
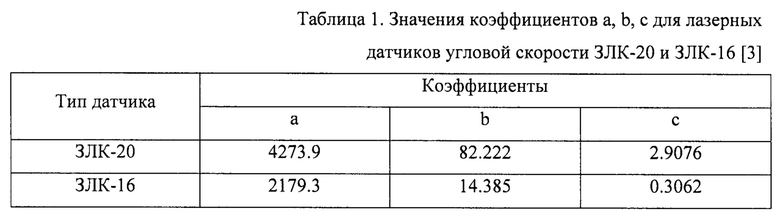
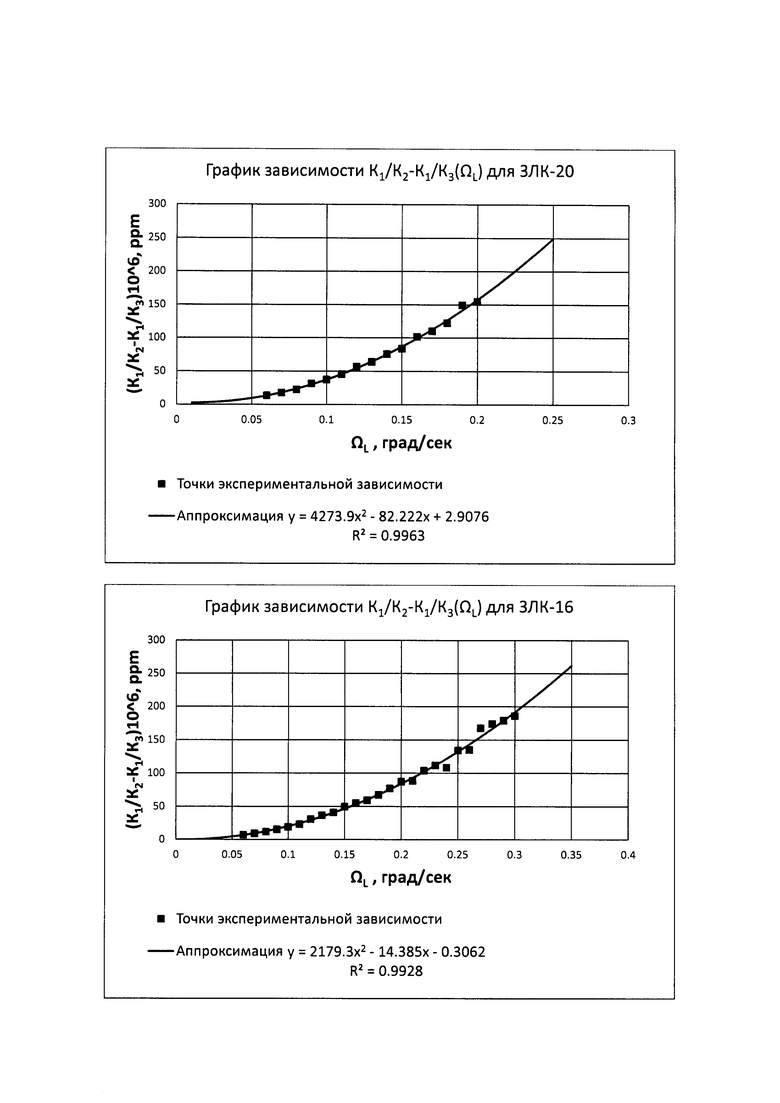
а, b, с - коэффициенты, определяемые по аппроксимации зависимости разности нелинейных искажений масштабного коэффициента от порога статического захвата (2):

Данные зависимости для лазерных датчиков угловой скорости ЗЛК-20 и ЗЛК-16 [3], аппроксимированные соотношением (2), представлены на чертеже, где:
 - разность нелинейных искажений масштабного коэффициента;
- разность нелинейных искажений масштабного коэффициента;
ΩL - порог статического захвата в лазерном датчике угловой скорости.
Как видно из этой фигуры, коэффициенты а, b, с для лазерных датчиков угловой скорости ЗЛК-20 и ЗЛК-16 [3] значительно отличаются друг от друга по типу датчика. Значения коэффициентов а, b, с приведены в таблице 1.
Пример реализации предлагаемого способа. Лазерный датчик угловой скорости фиксируют на поворотном столе, поджигают разряд в резонаторе датчика, накладывают продольное магнитное поле на активную среду лазера (создают знакопеременную частотную подставку). Затем датчик вращают на поворотном столе с угловыми скоростями: Ω1 >> Ω0 (например, 400 град/сек),  (на 1 град/сек) и
(на 1 град/сек) и  (на 1 град/сек), где Ω0 - угловая скорость вращения, совпадающая с амплитудой знакопеременной частотной подставки. То есть должно соблюдаться следующее неравенство угловых скоростей (3):
(на 1 град/сек), где Ω0 - угловая скорость вращения, совпадающая с амплитудой знакопеременной частотной подставки. То есть должно соблюдаться следующее неравенство угловых скоростей (3):

В процессе вращения датчика выделяют и обрабатывают информацию о частоте биений встречных волн, измеряют масштабные коэффициенты К1, К2, К3, соответственно угловой скорости, приведенные в таблице 2.
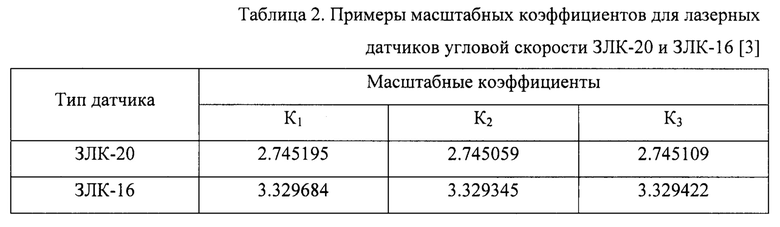
Далее масштабные коэффициенты используют в расчете порога статического захвата по формуле, заявленной в способе: Для ЗЛК-20 (4):

Для ЗЛК-16 (5):

Данный способ измерения порога статического захвата в лазерном датчике угловой скорости позволяет значительно (в 2-3 раза) сократить время измерений, уменьшить трудоемкость и автоматизировать процесс измерения порога статического захвата в лазерном датчике угловой скорости.
Исходные данные были получены в результате обработки статистической информации, основанной на значительном количестве измерений, проведенных на серийных лазерных датчиках угловой скорости.
Достоверность значений порога статического захвата, измеренных описанным выше способом, подтверждается испытаниями на серийных лазерных датчиках угловой скорости.
Источники информации:
1. А.О. Синельников, Е.М. Ермак, А.П. Коржавый. Особенности захвата частот в лазерном гироскопе с частотной подставкой на эффекте Зеемана // Наукоемкие технологии, №10, 2012, с. 40-45.
2. С.Е. Бекетов, А.С.Бессонов, Е.А. Петрухин, И.Н. Хохлов, Н.И. Хохлов. Влияние обратного рассеяния на нелинейные искажения масштабного коэффициента лазерного гироскопа с прямоугольной подставкой // Квантовая электроника, том 49, №11, 2019, с. 1059-1067. - прототип
3. В.В. Азарова, Ю.Д. Голяев, И.И. Савельев. Зеемановские лазерные гироскопы // Квантовая электроника, том 45, №2, 2015, с. 171-179.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения угловой скорости лазерного гироскопа со знакопеременной частотной подставкой | 2017 |
|
RU2651612C1 |
| Способ измерения комплексных коэффициентов связи в кольцевых резонаторах лазерных гироскопов | 2016 |
|
RU2629704C1 |
| СПОСОБ ОТБРАКОВКИ КОЛЬЦЕВЫХ РЕЗОНАТОРОВ ЛАЗЕРНЫХ ГИРОСКОПОВ | 2014 |
|
RU2570096C1 |
| Четырехчастотный лазерный гироскоп зеемановского типа | 2019 |
|
RU2731171C1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ МНОГОМОДОВЫЙ ВОЛОКОННЫЙ ЛАЗЕРНЫЙ ГИРОСКОП | 2020 |
|
RU2751052C1 |
| СПОСОБ ПРЕЦИЗИОННОЙ ОБРАБОТКИ СИГНАЛОВ ЛАЗЕРНОГО ГИРОСКОПА | 2014 |
|
RU2571437C1 |
| Устройство регулировки периметра четырехчастотного зеемановского лазерного гироскопа | 2020 |
|
RU2744420C1 |
| Двухрежимный зеемановский лазерный гироскоп | 2020 |
|
RU2740167C1 |
| Способ стабилизации и регулирования периметра четырехчастотного зеемановского лазерного гироскопа со знакопеременной магнитооптической частотной подставкой в форме меандра | 2023 |
|
RU2805770C1 |
| ТВЕРДОТЕЛЬНЫЙ ЛАЗЕРНЫЙ ГИРОСКОП | 2009 |
|
RU2421689C1 |
Изобретение относится к лазерной технике, а именно к лазерной гироскопии. Техническим результатом яляется сокращение времени и уменьшение трудоемкости процесса измерения порога статического захвата в лазерном датчике угловой скорости за счет сокращения количества требуемых для расчета данных и автоматизации процесса измерения. Способ измерения порога статического захвата в лазерном датчике угловой скорости включает создание знакопеременной частотной подставки, выделение и обработку информации о частоте биений встречных волн, определение масштабного коэффициента, определение разности нелинейных искажений масштабного коэффициента и вычисление порога статического захвата по формуле

где ΩL - порог статического захвата в лазерном датчике угловой скорости; К1; К2; К3 - масштабные коэффициенты лазерного датчика угловой скорости; а, b, с - коэффициенты, определяемые по аппроксимации зависимости разницы нелинейных искажений масштабного коэффициента от порога статического захвата. 1 ил., 2 табл.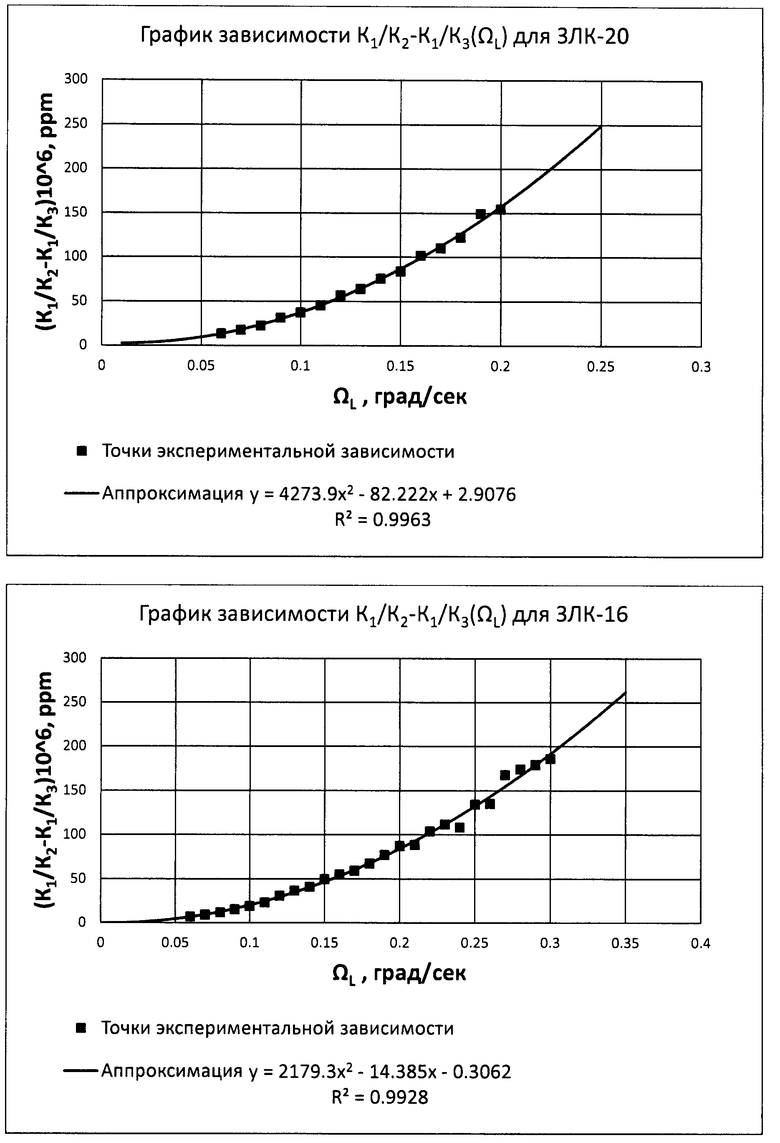
Способ измерения порога статического захвата в лазерном датчике угловой скорости, включающий создание знакопеременной частотной подставки, выделение и обработку информации о частоте биений встречных волн, и определение масштабного коэффициента, отличающийся тем, что определяют разность нелинейных искажений масштабного коэффициента и вычисляют порог статического захвата по формуле

где ΩL - порог статического захвата в лазерном датчике угловой скорости;
К1 - масштабный коэффициент лазерного датчика угловой скорости при угловой скорости вращения Ω1, много большей угловой скорости вращения Ω0, совпадающей с амплитудой знакопеременной частотной подставки;
К2 - масштабный коэффициент лазерного датчика угловой скорости при угловой скорости вращения Ω2, меньшей угловой скорости вращения Ω0, совпадающей с амплитудой знакопеременной частотной подставки;
К3 - масштабный коэффициент лазерного датчика угловой скорости при угловой скорости вращения Ω3, меньшей угловой скорости вращения Ω2;
а, b, с - коэффициенты, определяемые по аппроксимации зависимости разницы нелинейных искажений масштабного коэффициента от порога статического захвата.
| Устройство для подачи волокнистого материала от смесительной машины в бункера трепальных машин | 1960 |
|
SU138509A1 |
| Устройство для измерения скорости на основе волоконного интерферометра Саньяка | 2018 |
|
RU2676392C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ ЛАЗЕРНЫМ ГИРОСКОПОМ | 2013 |
|
RU2525648C1 |
| US 2017211952 A1, 27.07.2017. | |||

