Область техники, к которой относится изобретение
Настоящее изобретение относится, в частности, к способу и системе мониторинга качества внутреннего воздуха и управления вентиляцией для поезда.
Предшествующий уровень техники
С быстрым развитием высокоскоростных поездов Китая и повышением материального и культурного уровней людей, люди теперь предъявляют все более высокие требования к комфорту в купе помимо требования безопасности и надежности для высокоскоростных поездов.
Качество воздуха в купе высокоскоростного поезда напрямую влияет на комфорт пассажиров. Поэтому, мониторинг и управление качеством воздуха в поезде играют важную роль в комфорте поезда.
К тому же энергия и окружающая среда также важны в настоящее время. Реализация различных схем регулировки вентиляции для разных качеств воздуха в поездах способствует развитию энергосберегающих, удобных и надежных высокоскоростных поездов.
Краткое описание сущности изобретения
Задача настоящего изобретения состоит в обеспечении способа и системы мониторинга качества внутреннего воздуха и управления вентиляцией для поезда, чтобы улучшить комфорт пассажиров в поезде, которые могут выбирать подходящие стратегии управления вентиляцией в соответствии с разными степенями качества воздуха, чтобы достичь гарантии здоровья для качества внутреннего воздуха высокоскоростного поезда при условиях сбережения энергии и защиты окружающей среды.
Чтобы решить вышеуказанные технические проблемы, техническое решение, соответствующее настоящему изобретению, состоит в следующем.
Способ мониторинга качества внутреннего воздуха и управления вентиляцией для поезда включает в себя следующие этапы:
этап 1, получение множества групп данных обнаружения качества внутреннего воздуха и данных обнаружения качества внешнего воздуха;
этап 2, получение индекса Q0 исчерпывающей оценки внутреннего воздуха с использованием данных обнаружения качества внутреннего воздуха на этапе 1 и получение индекса Q1 исчерпывающей оценки внешнего воздуха с использованием данных обнаружения качества внешнего воздуха на этапе 1;
этап 3, определение отношения величин между Q0 и Q1, полученными на этапе 2, и если Q0≥Q1, переход к этапу 41; в противном случае, переход к этапу 51;
этап 41, обучение модели управления объемом внешнего свежего воздуха в соответствии со следующим способом:
выбор n1 групп соответствующих данных обнаружения качества внутреннего воздуха и соответствующих данных обнаружения качества внешнего воздуха как экспериментальных данных;
установка уровня объема вентиляции системы вентиляции высокоскоростного поезда на уровень G1;
выполнение вентиляционных экспериментов на поезде при условиях n1 групп экспериментальных данных, чтобы получить минимальный уровень объема вентиляции, который может доводить качество внутреннего воздуха до значения, благоприятного для здоровья человека, в пределах 5 минут, как метку уровня объема вентиляции, соответствующую каждой группе экспериментальных данных; и
обучение модели управления объемом внешнего свежего воздуха посредством принятия n1 групп экспериментальных данных в качестве входа и принятия меток уровня объема вентиляции, соответствующих n1 группам экспериментальных данных, в качестве выхода, чтобы получить модель управления объемом внешнего свежего воздуха;
этап 51, обучение модели управления очищением внутреннего воздуха в соответствии со следующим способом:
выбор n2 групп соответствующих данных обнаружения качества внутреннего воздуха и соответствующих данных обнаружения качества внешнего воздуха как экспериментальных данных;
установка уровня объема вентиляции системы вентиляции высокоскоростного поезда на уровень G1 и установка уровня мощности устройства очищения воздуха на уровень G2;
выполнение вентиляционных экспериментов на поезде при условиях n2 групп экспериментальных данных, чтобы получить минимальный уровень объема вентиляции и минимальный уровень мощности устройства очищения воздуха, который может доводить качество воздуха до значения, благоприятного для здоровья человека, в пределах 5 минут, причем полученный минимальный уровень объема вентиляции используется как метка уровня объема вентиляции, соответствующая каждой группе экспериментальных данных, и полученный минимальный уровень мощности устройства очищения воздуха используется как метка уровня мощности устройства очищения воздуха, соответствующая каждой группе экспериментальных данных; и
обучение модели управления очищением внутреннего воздуха посредством принятия n2 групп экспериментальных данных в качестве входа и принятия меток уровня объема вентиляции и меток уровня мощности устройства очищения воздуха, соответствующих n2 группам экспериментальных данных, в качестве выхода, чтобы получить модель управления очищением внутреннего воздуха;
этап 6, обнаружение данных обнаружения качества внутреннего воздуха и данных обнаружения качества внешнего воздуха;
этап 7, получение индекса Q0 исчерпывающей оценки внутреннего воздуха с использованием данных обнаружения качества внутреннего воздуха на этапе 6 и получение индекса Q1 исчерпывающей оценки внешнего воздуха с использованием данных обнаружения качества внешнего воздуха на этапе 6; и
этап 8, определение отношения величин между Q0 и Q1, полученных на этапе 7:
если Q0≥Q1, вызов модели управления объемом внешнего свежего воздуха, чтобы получить требуемый уровень объема вентиляции и управление системой вентиляции высокоскоростного поезда при помощи уровня объема вентиляции;
в противном случае, вызов модели управления очищением внутреннего воздуха, чтобы получить требуемый уровень объема вентиляции и уровень мощности устройства очищения воздуха, управление системой вентиляции поезда при помощи уровня объема вентиляции и управление устройством очищения воздуха при помощи уровня мощности устройства очищения воздуха.
В качестве предпочтительного режима, данные обнаружения качества внутреннего воздуха и данные обнаружения качества внешнего воздуха оба включают в себя одно или несколько из концентрации CO2, концентрации NO2, концентрации SO2, концентрации PM2.5, концентрации VOC и концентрации пыли.
В качестве предпочтительного режима, данные обнаружения качества внутреннего воздуха и/или данные обнаружения качества внешнего воздуха получают путем режима многоточечного мониторинга.
В качестве предпочтительного режима,
способ вычисления указателя Q0 исчерпывающей оценки внутреннего воздуха представляет собой:
Q0=внутренняя концентрация CO2×р1+внутренняя концентрация NO2×р2+внутренняя концентрация SO2×р3+внутренняя концентрация PM2.5×р4+внутренняя концентрация VOC×р5+внутренняя концентрация пыли×р6;
Способ вычисления указателя Q1 исчерпывающей оценки внешнего воздуха представляет собой:
Q1=внешняя концентрация CO2×р1+внешняя концентрация NO2×о2+внешняя концентрация SO2×р3+внешняя концентрация PM2.5×р4+внешняя концентрация VOC×P5+внешняя концентрация пыли×р6;
причем P1, P2, P3, P4, P5 и P6 являются соответствующими весами загрязнителей.
В качестве предпочтительного режима, на этапе 41, модель управления объемом внешнего свежего воздуха обучают с использованием BP алгоритма нейронной сети, причем вес и порог BP нейронной сети получают путем роевой оптимизации квантовых частиц с самонастраивающимися весами, включая:
этап A1: использование вектора позиции каждой отдельной квантовой частицы в роях квантовых частиц как веса и порога BP нейронной сети и инициализацию параметра вектора позиции роя отдельных квантовых частиц в случайное число из [-1, 1];
причем число роев квантовых частиц находится в диапазоне [25, 70], число частиц в рое квантовых частиц находится в диапазоне [5, 50], максимальное число итераций находится в диапазоне [400, 1000], число итераций для формирования элитного роя находится в диапазоне [60, 180], порог определения ранней сходимости находится в диапазоне [0,01, 0,45], и наихудший коэффициент вариации частиц в роях δ% находится в диапазоне [2%, 7%];
этап A2: установка фитнесс-функции (функции пригодности) и определение вектора позиции и числа t итераций исходной оптимальной отдельной квантовой частицы, причем t=1;
подстановка веса и порога, соответствующих вектору позиции отдельной квантовой частицы, в модель управления объемом внешнего свежего воздуха на основе BP нейронной сети, определение типа идентифицированной метки вектора с использованием модели управления объемом внешнего свежего воздуха на основе BP нейронной сети, определенной из вектора позиции отдельной квантовой частицы, и использование обратной среднеквадратичной погрешности выведенной метки вектора и действительной метки вектора как второй функции пригодности;
этап A3: вычисление фитнесс-дисперсии (дисперсии пригодности) роя каждого роя квантовых частиц и выполнение определения ранней сходимости;
если дисперсия пригодности роя для роя квантовых частиц меньше, чем порог γ определения ранней сходимости, изменение δ% частиц наихудшей пригодности и экстремальных частиц роя в рое квантовых частиц, и использование текущих частиц наилучшей пригодности как глобальных оптимальных отдельных квантовых частиц;
этап A4: определение, следует ли формировать элитный рой;
когда число итераций больше, чем число итераций элитного роя, извлечение экстремальных значений каждого роя посредством совместного использования информации между роями, чтобы сформировать элитный рой, и возвращение к этапу A8, в противном случае, возвращение к этапу A5;
этап A5: обновление параметров частиц роя каждого роя;
этап A6: повторное вычисление и сравнение значения пригодности каждой частицы; если значение пригодности превосходит текущее отдельное экстремальное значение, обновление отдельного экстремального значения; сравнение глобальных экстремальных частиц; если значение пригодности частицы превосходит текущее экстремальное значение роя, обновление глобальных экстремальных частиц, предположение t=t+1 и возвращение к этапу A3;
этап A7: продолжение эволюционировать элитный рой;
этап A8: определение, удовлетворено ли максимальное число итераций, и выход, если оно удовлетворено, в противном случае, предположение t=t+1, и возвращение к этапу A3, пока глобальное оптимальное значение не будет найдено; и вывод веса и порога BP нейронной сети.
В качестве предпочтительного режима, на этапе 51, модель управления очищением внутреннего воздуха обучают с использованием серой нейронной сети, причем вес и порог серой нейронной сети получают путем оптимизации, использующей хаотический алгоритм летучих мышей, включающий в себя:
этап B1: использование позиции отдельной летучей мыши как веса и порога модели управления очищением внутреннего воздуха на основе серой нейронной сети, инициализацию роев (стай) летучих мышей и установку параметров стай летучих мышей;
причем размер стаи летучих мышей находится в диапазоне [200, 500], максимальная частота импульсов r0 отдельной летучей мыши находится в диапазоне [0,25, 0,5], максимальная интенсивность звукового импульса A0 находится в диапазоне [0,25, 0,5], максимальное число итераций находится в диапазоне [150, 300], точность поиска находится в диапазоне [0,001, 0,1], частота импульсов находится в диапазоне [0, 1,5], коэффициент повышения частоты поиска летучей мыши находится в диапазоне [0,02, 0,08], коэффициент затухания интенсивности звука находится в диапазоне [0,8, 0,96], максимальное число итераций находится в диапазоне [100, 500], и максимальная точность поиска находится в диапазоне [0,01, 0,1];
этап B2: установка фитнесс-функции (функции пригодности) и определение исходной оптимальной позиции отдельной летучей мыши и числа t итераций (t=1); подстановка веса и порога, соответствующих позиции отдельной летучей мыши, в модель управления очищением внутреннего воздуха на основе серой нейронной сети, получение результата обнаружения с использованием модели управления очищением внутреннего воздуха на основе модели серой нейронной сети, определенной из позиции отдельной летучей мыши, и формирование первой функции пригодности f1(x) (f1(x)=1/(E+1)) с разностью E между результатом обнаружения и действительной ситуацией;
вычисление пригодности позиции каждой отдельной летучей мыши с использованием первой функции пригодности и использование позиции отдельной летучей мыши, соответствующей максимальной пригодности, как исходной оптимальной позиции отдельной летучей мыши;
этап B3: обновление скорости и позиции отдельной летучей мыши с использованием установленной частоты импульсов;
этап B4: если Rand1>ri, случайное возмущение мыши в оптимальной позиции для генерации возмущенной позиции отдельной летучей мыши;
причем, Rand1 является случайным числом, равномерно распределенным в [0, 1], и ri является частотой импульсов i-ой летучей мыши;
этап B5: если Rand2>Ai, и пригодность возмущенной позиции отдельной летучей мыши превосходит пригодность позиции отдельной летучей мыши до возмущения, перемещение отдельной летучей мыши в возмущенную позицию, иначе, сохранение отдельной летучей мыши в исходной позиции;
причем, Rand2 является случайным числом, равномерно распределенным в [0, 1], и Ai является интенсивностью звука i-ой летучей мыши;
этап B6: если условие этапа B5 удовлетворено, обновление частоты импульсов и интенсивности звукового импульса отдельной летучей мыши с использованием коэффициента повышения частоты поиска летучей мыши и коэффициента затухания интенсивности звука, и переход к этапу B4, иначе, переход к этапу B7;
этап B7: вычисление пригодности позиции каждой отдельной летучей мыши в текущей стае летучих мышей и выполнение хаотической оптимизации позиции и скорости на верхних m% отдельных летучих мышей в убывающем порядке, чтобы получить обновленные верхние m% отдельных летучих мышей, причем m находится в диапазоне [5, 20]; и
этап B8: определение, достигнуто ли максимальное число итераций или максимальная точность поиска; если достигнуто, выбор глобальной оптимальной отдельной летучей мыши из обновленных верхних m% отдельных летучих мышей в соответствии со значением пригодности и вывод оптимального веса и порога модели управления очищением внутреннего воздуха на основе серой нейронной сети, соответствующей глобальной оптимальной отдельной летучей мыши; в противном случае, предположение t=t+1 и возвращение к этапу B3, чтобы продолжить следующую итерацию.
На основе той же самой концепции изобретения, настоящее изобретение дополнительно обеспечивает систему мониторинга качества внутреннего воздуха и управления вентиляцией для поезда, включающую в себя:
модуль обнаружения качества внутреннего воздуха, сконфигурированный, чтобы получать данные обнаружения качества внутреннего воздуха;
модуль обнаружения качества внешнего воздуха, сконфигурированный, чтобы получать данные обнаружения качества внешнего воздуха;
модуль передачи данных: сконфигурированный, чтобы передавать полученные данные обнаружения качества внутреннего воздуха и полученные данные обнаружения качества внешнего воздуха на модуль обработки данных;
модуль обработки данных, сконфигурированный для моделирования и управления, причем:
процесс моделирования включает в себя:
получение индекса Q0 исчерпывающей оценки внутреннего воздуха с использованием данных обнаружения качества внутреннего воздуха и получение индекса Q1 исчерпывающей оценки внешнего воздуха с использованием данных обнаружения качества внешнего воздуха;
когда Q0≥Q1, обучение модели управления объемом внешнего свежего воздуха в соответствии со следующим процессом:
выбор n1 групп соответствующих данных обнаружения качества внутреннего воздуха и соответствующих данных обнаружения качества внешнего воздуха как экспериментальных данных;
установка уровня объема вентиляции системы вентиляции поезда на уровень G1;
выполнение вентиляционных экспериментов на поезде при условиях n1 групп экспериментальных данных, чтобы получить минимальный уровень объема вентиляции, который может доводить качество воздуха до значения, благоприятного для здоровья человека, в пределах 5 минут, как метку уровня объема вентиляции, соответствующую каждой группе экспериментальных данных;
обучение модели управления объемом внешнего свежего воздуха посредством принятия n1 групп экспериментальных данных в качестве входа и принятия меток уровня объема вентиляции, соответствующих n1 группам экспериментальных данных, в качестве выхода, чтобы получить модель управления объемом внешнего свежего воздуха;
когда Q0<Q1, обучение модели управления очищением внутреннего воздуха в соответствии со следующим процессом:
выбор n2 групп соответствующих данных обнаружения качества внутреннего воздуха и соответствующих данных обнаружения качества внешнего воздуха Q0<Q1 как экспериментальных данных;
установка уровня объема вентиляции системы вентиляции поезда на уровень G1 и установка уровня мощности устройства очищения воздуха на уровень G2;
выполнение вентиляционных экспериментов на поезде при условиях n2 групп экспериментальных данных, чтобы получить минимальный уровень объема вентиляции и минимальный уровень мощности устройства очищения воздуха, который может доводить качество воздуха до значения, благоприятного для здоровья человека, в пределах 5 минут, причем полученный минимальный уровень объема вентиляции используется как метка уровня объема вентиляции, соответствующая каждой группе экспериментальных данных, и полученный минимальный уровень мощности устройства очищения воздуха используется как метка уровня мощности устройства очищения воздуха, соответствующая каждой группе экспериментальных данных; и
обучение модели управления очищением внутреннего воздуха посредством принятия n2 групп экспериментальных данных в качестве входа и принятия меток уровня объема вентиляции и меток уровня мощности устройства очищения воздуха, соответствующих n2 группам экспериментальных данных, в качестве выхода, чтобы получить модель управления очищением внутреннего воздуха;
процесс управления включает в себя:
получение данных обнаружения качества внутреннего воздуха и данных обнаружения качества внешнего воздуха;
получение индекса Q0 исчерпывающей оценки внутреннего воздуха с использованием данных обнаружения качества внутреннего воздуха и получение индекса Q1 исчерпывающей оценки внешнего воздуха с использованием данных обнаружения качества внешнего воздуха;
если Q0≥Q1, вызов модели управления объемом внешнего свежего воздуха, чтобы получить требуемый уровень объема вентиляции и управление системой вентиляции высокоскоростного поезда при помощи уровня объема вентиляции;
в противном случае, вызов модели управления очищением внутреннего воздуха, чтобы получить требуемый уровень объема вентиляции и уровень мощности устройства очищения воздуха, управление системой вентиляции поезда при помощи уровня объема вентиляции, и управление устройством очищения воздуха при помощи уровня мощности устройства очищения воздуха; и
модуль управления вентиляцией, включающий в себя систему вентиляции и устройство очищения воздуха; причем система вентиляции сконфигурирована, чтобы вентилировать поезд в соответствии с уровнем объема вентиляции, выведенным модулем обработки данных, и устройство очищения воздуха сконфигурировано, чтобы очищать воздух в поезде в соответствии с уровнем мощности устройства очищения воздуха, выведенным модулем обработки данных.
В качестве предпочтительного режима, как модуль обнаружения качества внутреннего воздуха, так и модуль обнаружения качества внешнего воздуха включают в себя один или более из датчика концентрации CO2, датчика концентрации NO2, датчика концентрации SO2, датчика концентрации PM2.5, датчика концентрации VOC и датчика концентрации пыли.
В качестве предпочтительного режима, модуль обнаружения качества внутреннего воздуха включает в себя несколько устройств обнаружения качества внутреннего воздуха, и устройство обнаружения качества внутреннего воздуха расположено в голове, середине и хвосте каждого купе, соответственно; модуль обнаружения качества внешнего воздуха включает в себя несколько устройств обнаружения качества внешнего воздуха, и устройство обнаружения качества внешнего воздуха расположено во внешнем воздухозаборнике каждого вентиляционного короба каждого купе; и каждые три купе совместно используют модуль обработки данных.
В качестве предпочтительного режима, модуль передачи данных включает в себя модуль беспроводной передачи.
Путем установки нескольких модулей обнаружения качества воздуха на поезде для получения данных качества внутреннего и внешнего воздуха, обработки и анализа полученных данных и выполнения рационального управления вентиляцией на основе данных качества внутреннего и внешнего воздуха при разных условиях, настоящее изобретение имеет следующие преимущества:
(1) Качество воздуха в купе высокоскоростного поезда контролируется регулярно и эффективно, что обеспечивает здоровье и комфорт среды в купе поезда и улучшает опыт пассажиров.
(2) Конфигурация внутреннего и внешнего интегрированного мониторинга и многоточечного мониторинга избегает применения обнаружения во избежание ошибок, вызванных неравномерным распределением воздуха внутри и снаружи поезда, и обеспечивает точность полученных результатов.
(3) Разные стратегии управления вентиляцией выбираются в соответствии с разными данными качества внутреннего и внешнего воздуха, чтобы избежать внутреннего вторичного загрязнения, вызванного серьезным загрязнением внешнего воздуха, и чтобы обеспечить стабильность качества внутреннего воздуха.
(4) Стратегии управления делятся на разные уровни, и наиболее приемлемый уровень управления вентиляцией выбирается в соответствии с разными условиями качества воздуха, что максимизирует сбережение энергии при обеспечении эффекта вентиляции и достигает защиты окружающей среды.
(5) Уровни управления вентиляцией при разных условиях качества воздуха выбираются с использованием нейронной сети, которая обеспечивает эффективность выбора стратегий вентиляции.
Краткое описание чертежей
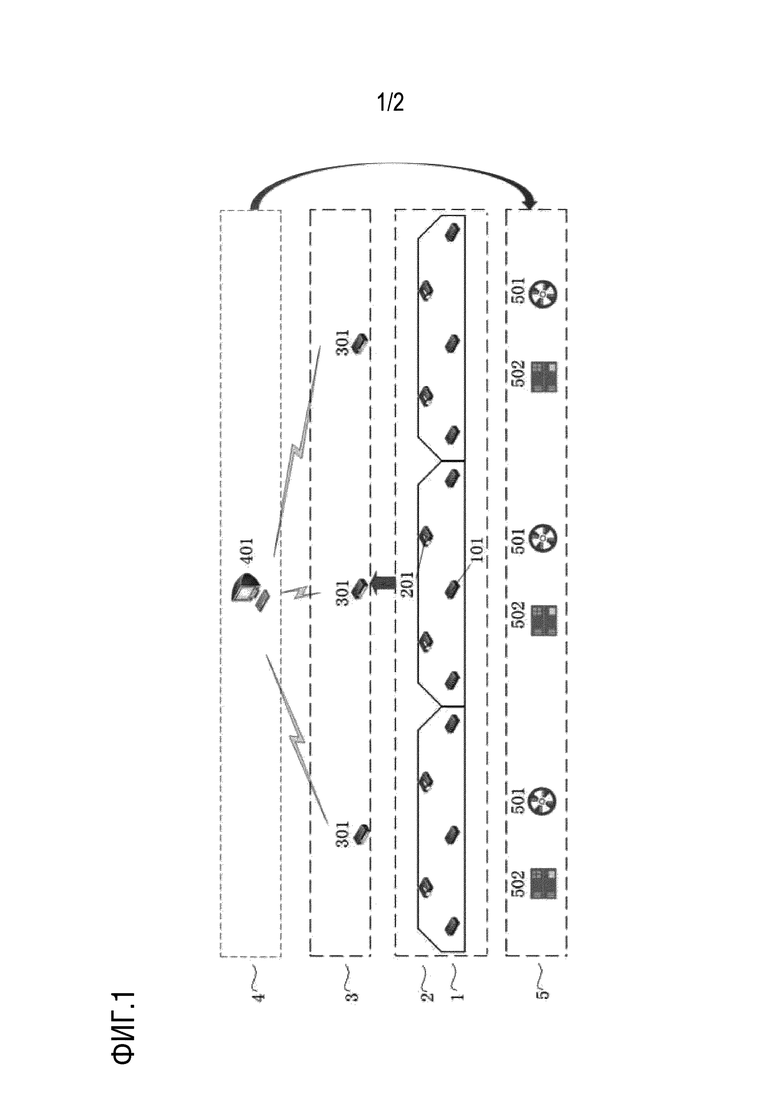
Фиг. 1 является принципиальной схемой варианта осуществления системы в соответствии с настоящим изобретением.
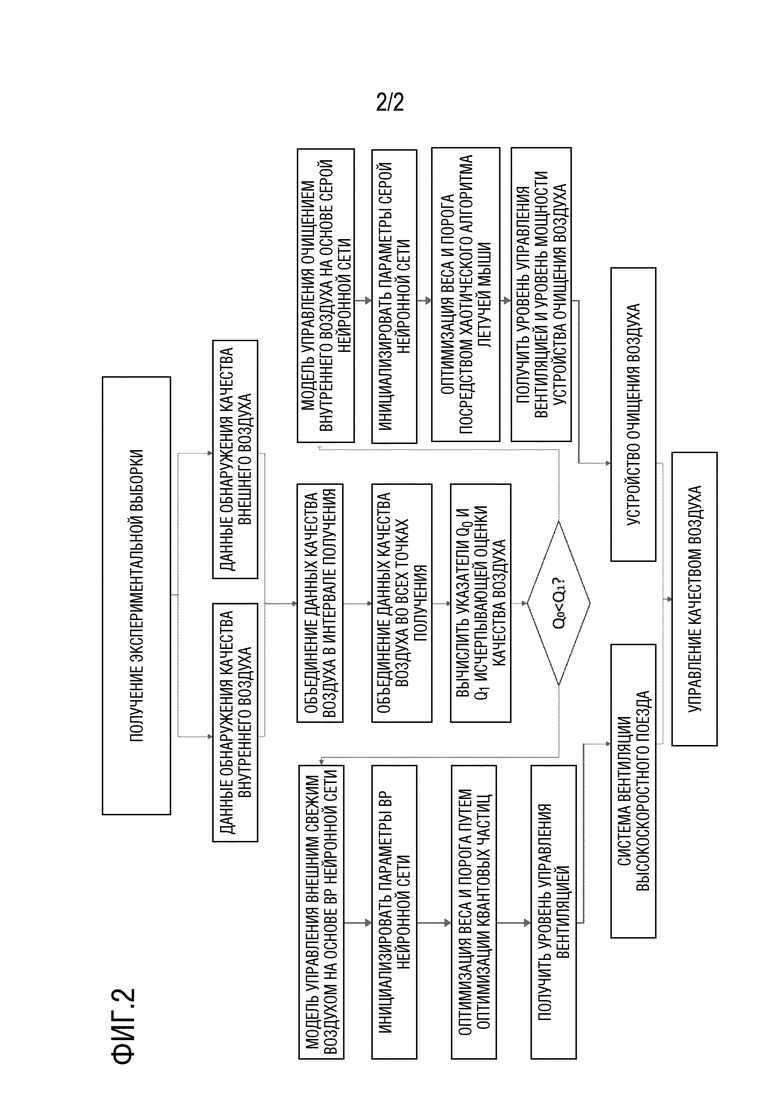
Фиг. 2 является блок-схемой последовательности операций варианта осуществления способа в соответствии с настоящим изобретением.
На которых: 1 модуль обнаружения качества внутреннего воздуха, 101 устройство обнаружения качества внутреннего воздуха, 2 модуль обнаружения качества внешнего воздуха, 201 устройство обнаружения качества внешнего воздуха, 3 модуль передачи данных, 301 модуль беспроводной передачи, 4 модуль обработки данных, 401 центральный компьютер, 5 модуль управления вентиляцией, 501 система вентиляции, 502 устройство очищения воздуха.
Подробное описание вариантов осуществления
Настоящее изобретение может контролировать концентрацию загрязнителя воздуха внутри купе поезда и концентрацию загрязнителя воздуха снаружи высокоскоростного поезда в реальном времени и выбирать стратегию управления вентиляцией в соответствии с данными измеренной концентрации загрязнителя воздуха, чтобы обеспечить качество воздуха внутри купе высокоскоростного поезда в благоприятном для здоровья состоянии. Выбранную стратегию вентиляции получают путем обучения нейронной сети, входом модели является множество измеренных данных, и выходом является ряд стратегий вентиляции.
Как показано на фиг. 1, система мониторинга качества внутреннего воздуха и управления вентиляцией для всего высокоскоростного поезда включает в себя модуль 1 обнаружения качества внутреннего воздуха, модуль 2 обнаружения качества внешнего воздуха, модуль 3 передачи данных, модуль 4 обработки данных и модуль 5 управления вентиляцией. Детали соответственных модулей являются следующими:
Модуль 1 обнаружения качества внутреннего воздуха: этот модуль состоит из устройства 101 обнаружения качества внутреннего воздуха, расположенного внутри каждого купе. Каждое устройство 101 обнаружения качества внутреннего воздуха включает в себя датчик концентрации CO2, датчик концентрации NO2, датчик концентрации SO2, датчик концентрации PM2.5, датчик VOC и датчик пыли. Устройство 101 обнаружения качества внутреннего воздуха расположено в голове, середине и хвосте каждого купе, соответственно. Данные, полученные модулем 1 обнаружения качества внутреннего воздуха, передаются на модуль 4 обработки данных модулем 3 передачи данных.
Модуль 2 обнаружения качества внешнего воздуха: этот модуль расположен во внешнем воздухозаборнике вентиляционного короба каждого купе, и каждый вентиляционный короб соответствует устройству 201 обнаружения качества внешнего воздуха. Аналогично устройству 101 обнаружения качества внутреннего воздуха, каждое устройство 201 обнаружения качества внешнего воздуха включает в себя датчик концентрации CO2, датчик концентрации NO2, датчик концентрации SO2, датчик концентрации PM2.5, датчик VOC и датчик пыли. Данные, полученные модулем 2 обнаружения качества внешнего воздуха, передаются на модуль 4 обработки данных модулем 3 передачи данных.
Модуль 3 передачи данных: модуль 3 передачи данных включает в себя модуль 301 беспроводной передачи, и каждое купе оборудовано модулем 301 беспроводной передачи, чтобы соединять модуль 1 обнаружения качества внутреннего воздуха, модуль 2 обнаружения качества внешнего воздуха и модуль 4 обработки данных, чтобы хранить полученные данные и передавать данные между устройствами. С учетом длины поезда, данные могут передаваться посредством сети 4G, которая является экономичной и простой.
Модуль 4 обработки данных: центральный компьютер 401 расположен в каждых трех купе, что определяется как область мониторинга качества воздуха и составляет модуль 4 обработки данных. Центральный компьютер 401 сконфигурирован, чтобы принимать данные получения внутреннего воздуха и данные получения внешнего воздуха, полученные из трех купе в пределах диапазона мониторинга, выполнять предварительную обработку данных и обучение модели соответственно и выводить результаты обучения модели во времени.
Модуль 5 управления вентиляцией: этот модуль состоит из системы 501 вентиляции и устройства 502 очищения воздуха, расположенного в вентиляционном коробе поезда. В соответствии с различными результатами, выведенными модулем 4 обработки данных, соответствующая стратегия управления вентиляцией исполняется, чтобы реализовывать сбережения энергии и защиту окружающей среды системы 501 вентиляции при обеспечении отвечающего требованиям качества воздуха в поезде.
Как показано на фиг. 2, способ мониторинга качества внутреннего воздуха и управления вентиляцией для всего высокоскоростного поезда включает в себя два процесса: офлайн-процесс обучения и онлайн-процесс управления вентиляцией.
Офлайн-процесс обучения
Способ настоящего изобретения сначала получает информацию концентрации загрязнителя воздуха внутри и снаружи поезда и затем отправляет полученные данные на центральный компьютер 401 в соответствующей области обнаружения для предварительной обработки данных и обучения модели. Обучение модели включает в себя два типа моделей нейронных сетей; когда различные указатели концентрации загрязнителя внутреннего воздуха меньше, чем указатели концентрации загрязнителя внешнего воздуха, модель управления объемом внешнего свежего воздуха обучается на основе BP нейронной сети, и разные уровни количеств вентиляции выводятся в соответствии с разными данными степеней концентрации загрязнителя внутреннего воздуха; и когда различные указатели концентрации загрязнителя внутреннего воздуха больше, чем указатели концентрации загрязнителя внешнего воздуха, модель управления очищением внутреннего воздуха обучается на основе серой нейронной сети. Разными уровнями величин вентиляции и мощности устройства очищения воздуха управляют в соответствии с разными степенями концентрации загрязнителя внутреннего воздуха. Весь офлайн-процесс детализируется следующим образом:
1. Получение данных качества внутреннего и внешнего воздуха
Данные концентрации различных загрязнителей получают с использованием устройства 101 обнаружения качества внутреннего воздуха и устройства 201 обнаружения качества внешнего воздуха, причем полученные данные обнаружения качества внутреннего воздуха выражаются как [ICO2, INO2, ISO2, Ipm2.5, Ivoc, Idust], и данные обнаружения качества внешнего воздуха выражаются как [OCO2, ONO2, OSO2, Opm2.5, Ovoc, Odust]. Чтобы провести различие между данными, полученными устройствами обнаружения качества воздуха в разных позициях в разных купе, форматы данных качества внутреннего и внешнего воздуха, в конечном счете передаваемых модулем беспроводной передачи, представляют собой [ICO2, INO2, ISO2, Ipm2.5, Ivoc, Idust, n, m, 0] и [OCO2, ONO2, OSO2, Opm2.5, Ovoc, Odust, n, m, l], причем n представляет номер купе; m представляет номер устройства обнаружения качества воздуха, m=1, 2, 3 для данных качества внутреннего воздуха, и m определяется числом контактных отверстий между устройством вентиляции в каждом купе и внешним воздухом для данных внешнего качества; 0/1 является кодом идентификации типа данных, 0 представляет, что группа данных является данными обнаружения качества внутреннего воздуха, и 1 представляет, что группа данных является данными обнаружения качества внешнего воздуха.
2. Предварительная обработка данных
Данные устройства 101 обнаружения качества внутреннего воздуха и устройства 201 обнаружения качества внешнего воздуха передаются на центральный компьютер 401 модуля 4 обработки данных посредством модуля 301 беспроводной передачи для предварительной обработки полученных данных. Все этапы предварительной обработки данных являются следующими:
(1) Получение данных получения качества внутреннего и внешнего воздуха целевого купе обнаружения в трех временных точках t-  , t и t+ , и полученные данные в трех временных точках усредняются, чтобы получить данные [ICO2, INO2, ISO2, Ipm2.5, Ivoc, Idust, n, m, 0] обнаружения качества внутреннего воздуха и данные [OCO2, ONO2, OSO2, Opm2.5, Ovoc, Odust, n, m, 1] обнаружения качества внешнего воздуха каждой точки обнаружения в пределах временного интервала N.
, t и t+ , и полученные данные в трех временных точках усредняются, чтобы получить данные [ICO2, INO2, ISO2, Ipm2.5, Ivoc, Idust, n, m, 0] обнаружения качества внутреннего воздуха и данные [OCO2, ONO2, OSO2, Opm2.5, Ovoc, Odust, n, m, 1] обнаружения качества внешнего воздуха каждой точки обнаружения в пределах временного интервала N.
(2) Обработка усреднения на полученных данных всех точек обнаружения качества внутреннего воздуха и полученных данных всех точек обнаружения качества внешнего воздуха на основе данных, полученных на этапе (1), в соответствии с кодом 0/1 идентификации и значением m каждой группы данных, и нормализация данных концентрации шести загрязнителей, чтобы в конечном счете получить общие данные обнаружения качества внутреннего воздуха [ICO2total, INO2total, ISO2total, Ipm2.5total, Ivoctotal, Idusttotal, n, 0] и общие данные обнаружения качества внешнего воздуха [OCO2total, ONO2total, OSO2total, Opm2.5total, Ovoctotal, Odusttotal, n, 1] целевого купе обнаружения.
(3) Вычисление индекса исчерпывающей оценки качества воздуха, и способ вычисления индекса исчерпывающей оценки качества воздуха определяется как:
Q=концентрация CO2×р1+концентрация NO2×р2+концентрация SO2×р3+концентрация PM2.5×р4+концентрация VOC×р5+концентрация пыли×р6
Причем p представляет весы концентрации разных загрязнителей, и р1=0,1, р2=0,1, р3=0,1, р4=0,3, р5=0,2, р6=0,2. Затем, итоговые данные обнаружения качества внутреннего и внешнего воздуха, полученные на этапе (2), подставляют в уравнение выше для вычисления, чтобы получить индекс Q0 исчерпывающей оценки внутреннего воздуха и индекс Q1 исчерпывающей оценки внешнего воздуха.
3. Обучение модели стратегии управления вентиляцией
(1) Модель управления объемом внешнего свежего воздуха обучают, и когда Q0≥Q1, модель используется, чтобы управлять объемом внешнего свежего воздуха системы управления вентиляцией.
Данные качества внутреннего и внешнего воздуха измеряются при разных наружных экспериментальных условиях, выбираются 1000 групп данных качества внутреннего и внешнего воздуха, уровни объема вентиляции системы 501 вентиляции поезда устанавливаются на четыре уровня 0, 1, 2 и 3, и вентиляционные эксперименты выполняются на поезде при условиях 1000 групп экспериментальных данных, чтобы получить минимальный уровень объема вентиляции, который может доводить качество воздуха до значения, благоприятного для здоровья человека, в пределах 5 минут, как метку, соответствующую каждой группе экспериментальных данных.
Модель управления объемом внешнего свежего воздуха обучается с использованием BP нейронной сети. Входом обучения модели являются данные обнаружения качества внутреннего и внешнего воздуха: [ICO2total, INO2total, ISO2total, Ipm2.5total, Ivoctotal, 1dusttotal, OCO2, ONO2, OSO2, Opm2.5, Ovoc, Odust], и выходом является метка уровня 0, 1, 2, 3 объема вентиляции, полученная при экспериментальных условиях вентиляции, таким образом получая модель управления объемом внешнего свежего воздуха на основе BP нейронной сети.
Входной слой BP нейронной сети включает в себя 12 узлов, выходной слой включает в себя 1 узел, максимальное число итераций в процессе обучения установлено в 500, и скорость обучения составляет 0,2.
Вес и порог BP нейронной сети в модели управления объемом внешнего свежего воздуха на основе BP нейронной сети получают путем оптимизации роя квантовых частиц с адаптивными весами. Процесс является следующим:
Этап A1: использование вектора позиции каждой отдельной квантовой частицы в роях квантовых частиц как веса и порога BP нейронной сети, параметр вектора позиции роя отдельных квантовых частиц инициализируется в случайное число из [-1, 1];
Число роев квантовых частиц находится в диапазоне [25, 70], число частиц в рое квантовых частиц находится в диапазоне [5, 50], максимальное число итераций находится в диапазоне [400, 1000], число итераций для формирования элитного роя находится в диапазоне [60, 180], порог определения ранней сходимости находится в диапазоне [0,01, 0,45], и наихудший коэффициент вариации частиц в роях δ% находится в диапазоне [2%, 7%];
Этап A2: устанавливается фитнесс-функция (функция пригодности), и определяются исходный оптимальный вектор позиции отдельной квантовой частицы и число t итераций (t=1);
Вес и порог, соответствующие вектору позиции отдельной квантовой частицы, подставляются в модель управления объемом внешнего свежего воздуха на основе BP нейронной сети, тип идентифицированной метки вектора определяется с использованием модели управления объемом внешнего свежего воздуха на основе BP нейронной сети, определенной из вектора позиции отдельной квантовой частицы, и обратная среднеквадратичная погрешность выведенной метки вектора и действительной метки вектора используется как вторая функция пригодности;
Этап A3: вычисляется дисперсия пригодности роя каждого роя квантовых частиц, и выполняется определение ранней сходимости;
Если дисперсия пригодности роя квантовых частиц меньше, чем порог γ определения ранней сходимости, δ% частиц наихудшей пригодности и экстремальных частиц роя в рое квантовых частиц изменяются, и текущие частицы наилучшей пригодности используются как глобальные оптимальные отдельные квантовые частицы.
Этап A4: определяется, следует ли формировать элитный рой;
Когда число итераций больше, чем число итераций элитного роя, экстремальные значения каждого роя извлекаются посредством совместного использования информации между роями, чтобы сформировать элитный рой, и возвращение к этапу A8, в противном случае, возвращение к этапу A5;
Этап A5: параметры частиц каждого роя обновляются;
Этап A6: значение пригодности каждой частицы и сравнивается; если значение пригодности превосходит текущее отдельное экстремальное значение, отдельное экстремальное значение обновляется; частицы глобального экстремального значения сравниваются; если значение пригодности частицы превосходит текущее экстремальное значение роя, частицы глобального экстремального значения обновляются, предполагается t=t+1, и выполняется возврат к этапу A3;
Этап A7: элитный рой продолжает эволюционировать;
Этап A8: определение, удовлетворено ли максимальное число итераций, и если оно удовлетворено, процесс завершается, в противном случае, предположение t=t+1 и возвращение к этапу A3, пока не будет найдено глобальное оптимальное значение; и вывод веса и порога BP нейронной сети.
(2) модель управления очищением внутреннего воздуха обучается, и когда Q0<Q1, модель используется, чтобы управлять количеством приточного воздуха системы 501 вентиляции и мощностью устройства 502 очищения воздуха.
Измеряются данные качества внутреннего и внешнего воздуха при различных наружных экспериментальных условиях, выбираются 1000 групп данных обнаружения качества внутреннего и внешнего воздуха, уровни объема вентиляции системы 501 вентиляции высокоскоростного поезда устанавливаются в четыре уровня 0, 1, 2 и 3, и значения мощности устройства 502 очищения воздуха устанавливаются в четыре уровня 0, 1, 2, и 3. Затем, вентиляционные эксперименты выполняются на поезде при 1000 группах экспериментальных данных, чтобы получить минимальный уровень объема вентиляции и минимальный уровень мощности устройства 502 очищения воздуха, который может доводить качество воздуха до значения, благоприятного для здоровья человека, в пределах 5 минут, как метку, соответствующую каждой группе экспериментальных данных.
Модель управления очищением внутреннего воздуха обучается с использованием серой нейронной сети, входом обучения модели являются данные обнаружения качества внутреннего и внешнего воздуха: [ICO2total, INO2total, ISO2total, Ipm2.5total, Ivoctotal, 1dusttotal, OCO2, ONO2, OSO2, Opm2.5, Ovoc, Odust], и выходом является метка уровня объема вентиляции и метка [0/1/2/3, 0/1/2/3] уровня устройства 502 очищения воздуха, полученные при экспериментальных условиях вентиляции, таким образом получая модель управления очищением внутреннего воздуха на основе серой нейронной сети.
Число узлов во входном слое модели управления очищением внутреннего воздуха на основе серой нейронной сети составляет 12, число узлов в скрытом слое составляет 6, и число узлов в выходном слое составляет 2; максимальное число итераций в процессе обучения установлено в 500, скорость обучения составляет 0,1, и порог составляет 0,05.
Вес и порог модели управления очищением внутреннего воздуха на основе серой нейронной сети получают путем оптимизации с использованием хаотического алгоритма летучей мыши. Процесс является следующим.
Этап B1: использование позиции отдельной летучей мыши как веса и порога модели обнаружения аномалии позиции на основе серой нейронной сети, инициализация стай летучих мышей, и установка параметров стай летучих мышей;
Размер стаи летучих мышей находится в диапазоне [200, 500], максимальная частота r0 импульсов отдельной летучей мыши находится в диапазоне [0,25, 0,5], максимальная интенсивность звукового импульса A0 находится в диапазоне [0,25, 0,5], максимальное число итераций находится в диапазоне [150, 300], точность поиска находится в диапазоне [0,001, 0,1], частота импульсов находится в диапазоне [0, 1.5], коэффициент повышения частоты поиска летучей мыши находится в диапазоне [0,02, 0,08], коэффициент затухания интенсивности звука находится в диапазоне [0,8, 0,96], максимальное число итераций находится в диапазоне [100, 500], и максимальная точность поиска находится в диапазоне [0,01, 0,1];
Этап B2: установка функции пригодности и определение исходной оптимальной позиции отдельной летучей мыши и числа t итераций (t=1);
Вес и порог, соответствующие позиции отдельной летучей мыши, подставляются в модель управления очищением внутреннего воздуха на основе серой нейронной сети, результат обнаружения получают с использованием модели управления очищением внутреннего воздуха на основе модели серой нейронной сети, определенной из позиции отдельной летучей мыши, и разность E между результатом обнаружения и действительной ситуацией используется, чтобы сформировать первую функцию пригодности f1(x), f1(x)=1/(E+1);
Пригодность позиции каждой отдельной летучей мыши вычисляется с использованием первой функции пригодности, и позиция отдельной летучей мыши, соответствующая максимальной пригодности, используется как исходная оптимальная позиция отдельной летучей мыши;
Этап B3: скорость и позиция отдельной летучей мыши обновляются с использованием установленной частоты импульсов;
Этап B4: если Rand1>ri, летучая мышь в оптимальной отдельной позиции получает случайное возмущение, чтобы сгенерировать возмущенную позицию отдельной летучей мыши;
Причем, Rand1 является случайным числом, равномерно распределенным в [0, 1], и ri является частотой импульсов i-ой летучей мыши;
Этап B5: если Rand2>Ai, и пригодность возмущенной позиции отдельной летучей мыши превосходит пригодность позиции отдельной летучей мыши до возмущения, отдельная летучая мышь перемещается в возмущенную позицию, иначе, сохраняется в исходной позиции;
Причем Rand2 является случайным числом, равномерно распределенным в [0, 1], и Ai является интенсивностью звука i-ой летучей мыши;
Этап B6: если условие этапа B5 удовлетворено, частота импульсов и интенсивность звукового импульса отдельной летучей мыши обновляются с использованием коэффициента повышения частоты поиска летучей мыши и коэффициента затухания интенсивности звука, и процесс переходит к этапу B4, иначе, переходит к этапу B7;
Этап B7: пригодность позиции каждой отдельной летучей мыши в текущей стае летучих мышей вычисляется, и хаотическая оптимизация позиции и скорости выполняется на верхних m% отдельных летучих мышей в порядке убывания, чтобы получить обновленные верхние m% отдельных летучих мышей, причем m находится в диапазоне [5, 20];
Этап B8: определение, достигнуто ли максимальное число итераций или максимальная точность поиска; если достигнуто, глобальная оптимальная отдельная летучая мышь выбирается из обновленных верхних m% отдельных летучих мышей в соответствии со значением пригодности, и оптимальные вес и порог модели управления очищением внутреннего воздуха на основе серой нейронной сети, соответствующие глобальной оптимальной отдельной летучей мыши, выводятся; в противном случае, предполагается t=t+1, и процесс возвращается к этапу B3, чтобы продолжить следующую итерацию.
Онлайн-процесс управления вентиляцией:
(1) Для определенного купе обнаружения, получают данные качества внутреннего и внешнего воздуха посредством модулей обнаружения качества внутреннего и внешнего воздуха, данные передают на модуль 4 обработки данных посредством модуля 301 беспроводной передачи для предварительной обработки, и получают индекс Q0 исчерпывающей оценки внутреннего воздуха и индекс Q1 исчерпывающей оценки внешнего воздуха.
(2) Когда Q0≥Q1, данные качества внутреннего и внешнего воздуха [ICO2total, INO2total, ISO2total, Ipm2.5total, Ivoctotal, 1dusttotal, OCO2total, ONO2total, OSO2total, Opm2.5total, Ovoctotal, Odusttotal], полученные в фазе предварительной обработки данных, вводятся в модель управления объемом внешнего свежего воздуха на основе BP нейронной сети, чтобы получить подходящий уровень 0/1/2/3 объема вентиляции, и система 501 вентиляции поезда управляется в соответствии с различными выведенными метками.
(3) Когда Q0<Q1, данные качества внутреннего и внешнего воздуха [ICO2total, INO2total, ISO2total, Ipm2.5total, Ivoctotal, 1dusttotal, OCO2total, ONO2total, OSO2total, Opm2.5total, Ovoctotal, Odusttotal], полученные в фазе предварительной обработки данных, вводятся в модель управления очищением внутреннего воздуха на основе серой нейронной сети, чтобы получить подходящий уровень объема вентиляции и уровень мощности [0/1/2/3, 0/1/2/3] устройства 502 очищения воздуха, и система 501 вентиляции и устройство 502 очищения воздуха поезда управляются в соответствии с различными выведенными метками.
Варианты осуществления настоящего изобретения описаны выше со ссылкой на чертежи, но настоящее изобретение не ограничено конкретными вариантами осуществления. Конкретные варианты осуществления, описанные выше, являются только иллюстративными, но не ограниченными. Множество форм могут также осуществляться специалистами в данной области техники на основе глубокого изучения настоящего изобретения без отклонения от цели настоящего изобретения и объема формулы изобретения, и эти формы входят в объем настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ДЛЯ ЗАЩИТЫ РАБОТЫ ПОЕЗДА В ЗАГРЯЗНЯЮЩЕЙ ВОЗДУШНОЙ СРЕДЕ | 2020 |
|
RU2771514C1 |
| СПОСОБ И УСТРОЙСТВО АДАПТИВНОГО АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ СИСТЕМОЙ ОТОПЛЕНИЯ, ВЕНТИЛЯЦИИ И КОНДИЦИОНИРОВАНИЯ | 2021 |
|
RU2784191C1 |
| СИСТЕМА И СПОСОБ ИНДИКАЦИИ СОСТОЯНИЯ ВОЗДУХООЧИСТИТЕЛЬНОГО УСТРОЙСТВА И УПРАВЛЕНИЯ С ИХ ИСПОЛЬЗОВАНИЕМ | 2021 |
|
RU2770345C1 |
| ЭКОНОМИЧНЫЙ ТЕСТЕР АККУМУЛЯТОРНЫХ БАТАРЕЙ | 2016 |
|
RU2717389C2 |
| Способ для создания контроллеров управления шагающими роботами на основе обучения с подкреплением | 2022 |
|
RU2816639C1 |
| СПОСОБ НЕИНВАЗИВНОЙ ДИФФЕРЕНЦИАЛЬНОЙ ДИАГНОСТИКИ ЗАБОЛЕВАНИЙ ОРГАНОВ ДЫХАТЕЛЬНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2760396C1 |
| СПОСОБ ОБРАБОТКИ ВЕКТОРНЫХ СИГНАЛОВ ДЛЯ РАСПОЗНАВАНИЯ ОБРАЗОВ НА ОСНОВЕ ВЕЙВЛЕТ-АНАЛИЗА | 2017 |
|
RU2690001C1 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ВОЗДУХООЧИСТИТЕЛЬНЫМ УСТРОЙСТВОМ С ИНДИКАЦИЕЙ СОСТОЯНИЯ ВОЗДУХООЧИСТИТЕЛЬНОГО УСТРОЙСТВА | 2021 |
|
RU2756287C1 |
| СИСТЕМА КОМПЬЮТЕРНОЙ БЕЗОПАСНОСТИ, ОСНОВАННАЯ НА ИСКУССТВЕННОМ ИНТЕЛЛЕКТЕ | 2017 |
|
RU2750554C2 |
| Наземный автоматизированный комплекс управления космическими аппаратами на базе нейросетевых технологий и элементов искусственного интеллекта с использованием базы знаний на основе технологии блокчейн и способ управления его реконфигурацией | 2018 |
|
RU2679742C1 |
Изобретение относится к способу и системе мониторинга качества внутреннего воздуха и управления вентиляцией высокоскоростного поезда. Система может контролировать концентрацию загрязнителя воздуха внутри купе поезда и концентрацию загрязнителя воздуха снаружи поезда в реальном времени и выбирать стратегию управления вентиляцией в соответствии с данными измеренной концентрации загрязнителя воздуха. Выбранную стратегию вентиляции получают путем обучения нейронной сети, входом модели является множество измеренных данных, а выходом является ряд стратегий вентиляции. Достигается обеспечение рационального управления вентиляцией, обеспечивающей качество воздуха внутри купе высокоскоростного поезда в благоприятном для здоровья состоянии. 5 н. и 10 з.п. ф-лы, 2 ил.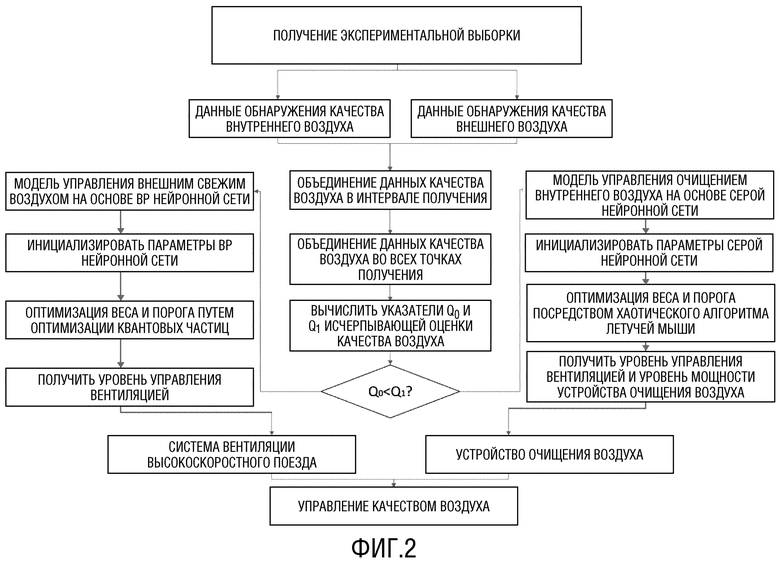
1. Способ моделирования для модели мониторинга качества внутреннего воздуха и управления вентиляцией поезда, содержащий следующие этапы:
этап 1, получение множества групп первых данных обнаружения качества внутреннего воздуха и первых данных обнаружения качества внешнего воздуха;
этап 2, получение индекса Q0 исчерпывающей оценки внутреннего воздуха с использованием первых данных обнаружения качества внутреннего воздуха на этапе 1 и получение индекса Q1 исчерпывающей оценки внешнего воздуха с использованием первых данных обнаружения качества внешнего воздуха на этапе 1;
этап 3, определение отношения величин между Q0 и Q1, полученных на этапе 2, и если Q0≥Q1, переход к этапу 41; в противном случае, переход к этапу 51;
этап 41, обучение модели управления объемом внешнего свежего воздуха в соответствии со следующим способом:
выбор n1 групп соответствующих первых данных обнаружения качества внутреннего воздуха и соответствующих первых данных обнаружения качества внешнего воздуха как экспериментальных данных;
установка уровня объема вентиляции системы (501) вентиляции высокоскоростного поезда на уровень G1;
выполнение вентиляционных экспериментов на поезде при условиях n1 групп экспериментальных данных, чтобы получить минимальный уровень объема вентиляции, который может доводить качество воздуха до значения, благоприятного для здоровья человека, в пределах 5 минут, как метку уровня объема вентиляции, соответствующую каждой группе экспериментальных данных; и
обучение модели управления объемом внешнего свежего воздуха посредством принятия n1 групп экспериментальных данных в качестве входа и принятия меток уровня объема вентиляции, соответствующих n1 группам экспериментальных данных, в качестве выхода, чтобы получить модель управления объемом внешнего свежего воздуха;
этап 51, обучение модели управления очищением внутреннего воздуха в соответствии со следующим способом:
выбор n2 групп соответствующих первых данных обнаружения качества внутреннего воздуха и соответствующих первых данных обнаружения качества внешнего воздуха как экспериментальных данных;
установка уровня объема вентиляции системы (501) вентиляции высокоскоростного поезда на уровень G1 и установка уровня мощности устройства (502) очищения воздуха на уровень G2;
выполнение вентиляционных экспериментов на поезде при условиях n2 групп экспериментальных данных, чтобы получить минимальный уровень объема вентиляции и минимальный уровень мощности устройства очищения воздуха, который может доводить качество внутреннего воздуха до значения, благоприятного для здоровья человека, в пределах 5 минут, причем полученный минимальный уровень объема вентиляции используется как метка уровня объема вентиляции, соответствующая каждой группе экспериментальных данных, и полученный минимальный уровень мощности устройства очищения воздуха используется как метка уровня мощности устройства очищения воздуха, соответствующая каждой группе экспериментальных данных; и
обучение модели управления очищением внутреннего воздуха посредством принятия n2 групп экспериментальных данных в качестве входа и принятия меток уровня объема вентиляции и меток уровня мощности устройства очищения воздуха, соответствующих n2 группам экспериментальных данных, в качестве выхода, чтобы получить модель управления очищением внутреннего воздуха;
использование обученной модели управления объемом внешнего свежего воздуха и обученной модели управления очищением внутреннего воздуха в качестве модели мониторинга качества внутреннего воздуха и управления вентиляцией поезда.
2. Способ моделирования для модели мониторинга качества внутреннего воздуха и управления вентиляцией поезда по п. 1, в котором первые данные обнаружения качества внутреннего воздуха и первые данные обнаружения качества внешнего воздуха оба содержат одну или более из концентрации CO2, концентрации NO2, концентрации SO2, концентрации PM2.5, концентрации VOC и концентрации пыли.
3. Способ моделирования для модели мониторинга качества внутреннего воздуха и управления вентиляцией поезда по п. 1, в котором первые данные обнаружения качества внутреннего воздуха и/или первые данные обнаружения качества внешнего воздуха получают посредством режима многоточечного мониторинга.
4. Способ моделирования для модели мониторинга качества внутреннего воздуха и управления вентиляцией поезда по п. 1, в котором
способ вычисления указателя Q0 исчерпывающей оценки внутреннего воздуха представляет собой:
Q0=внутренняя концентрация CO2×р1+внутренняя концентрация NO2×р2+внутренняя концентрация SO2×р3+внутренняя концентрация PM2.5×р4+внутренняя концентрация VOC×р5+внутренняя концентрация пыли×р6;
способ вычисления указателя Q1 исчерпывающей оценки внешнего воздуха представляет собой:
Q1=внешняя концентрация CO2×р1+внешняя концентрация NO2×р2+внешняя концентрация SO2×р3+внешняя концентрация PM2.5×р4+внешняя концентрация VOC×р5+внешняя концентрация пыли×р6;
причем, P1, P2, P3, P4, P5 и P6 являются соответствующими весами загрязнителей.
5. Способ моделирования для модели мониторинга качества внутреннего воздуха и управления вентиляцией поезда по п. 1, в котором на этапе 41, модель управления объемом внешнего свежего воздуха обучают с использованием алгоритма BP нейронной сети, причем вес и порог BP нейронной сети получают путем роевой оптимизации квантовых частиц с самонастраивающимися весами, содержащий:
этап A1: использование вектора позиции каждой отдельной квантовой частицы в роях квантовых частиц как веса и порога BP нейронной сети и инициализация параметра вектора позиции роя отдельных квантовых частиц в случайное число из [-1, 1];
причем число роев квантовых частиц находится в диапазоне [25, 70], число частиц в рое квантовых частиц находится в диапазоне [5, 50], максимальное число итераций находится в диапазоне [400, 1000], число итераций для формирования элитного роя находится в диапазоне [60, 180], порог определения ранней сходимости находится в диапазоне [0,01, 0,45], и наихудший коэффициент вариации частиц в роях δ% находится в диапазоне [2%, 7%];
этап A2: установка функции пригодности и определение вектора позиции и числа t итераций исходной оптимальной отдельной квантовой частицы, причем t=1;
подстановка веса и порога, соответствующих вектору позиции отдельной квантовой частицы, в модель управления объемом внешнего свежего воздуха на основе BP нейронной сети, определение типа идентифицированной метки вектора с использованием модели управления объемом внешнего свежего воздуха на основе BP нейронной сети, определенной из вектора позиции отдельной квантовой частицы, и использование обратной среднеквадратичной погрешности выведенной метки вектора и действительной метки вектора как второй функции пригодности;
этап A3: вычисление дисперсии пригодности роя каждого роя квантовых частиц и выполнение определения ранней сходимости;
если дисперсия пригодности роя для роя квантовых частиц меньше, чем порог γ определения ранней сходимости, изменение δ% частиц наихудшей пригодности и экстремальных частиц роя в рое квантовых частиц и использование текущих частиц наилучшей пригодности как глобальных оптимальных отдельных квантовых частиц;
этап A4: определение, следует ли формировать элитный рой;
когда число итераций больше, чем число итераций элитного роя, извлечение экстремальных значений каждого роя посредством совместного использования информации между роями, чтобы сформировать элитный рой, и возвращение к этапу A8, в противном случае, возвращение к этапу A5;
этап A5: обновление параметров частиц каждого роя;
этап A6: повторное вычисление и сравнение значения пригодности каждой частицы; если значение пригодности превосходит текущее отдельное экстремальное значение, обновление отдельного экстремального значения; сравнение глобальных экстремальных частиц; если значение пригодности частицы превосходит текущее экстремальное значение роя, обновление глобальных экстремальных частиц, предположение t=t+1 и возвращение к этапу A3;
этап A7: продолжение эволюционировать элитный рой;
этап A8: определение, удовлетворено ли максимальное число итераций, и выход, если оно удовлетворено, в противном случае, предположение t=t+1 и возвращение к этапу A3, пока не будет найдено глобальное оптимальное значение; и вывод веса и порога BP нейронной сети.
6. Способ моделирования для модели мониторинга качества внутреннего воздуха и управления вентиляцией поезда по п. 1, в котором на этапе 51, модель управления очищением внутреннего воздуха обучают с использованием серой нейронной сети, причем вес и порог серой нейронной сети получают путем оптимизации использования хаотического алгоритма летучей мыши, содержащий:
этап B1: использование позиции отдельной летучей мыши как веса и порога модели управления очищением внутреннего воздуха на основе серой нейронной сети, инициализация стай летучих мышей и установка параметров стай летучих мышей;
причем размер стаи летучих мышей находится в диапазоне [200, 500], максимальная частота r0 импульсов отдельной летучей мыши находится в диапазоне [0,25, 0,5], максимальная интенсивность звукового импульса A0 находится в диапазоне [0,25, 0,5], максимальное число итераций находится в диапазоне [150, 300], точность поиска находится в диапазоне [0,001, 0,1], частота импульсов находится в диапазоне [0, 1,5], коэффициент повышения частоты поиска летучей мыши находится в диапазоне [0,02, 0,08], коэффициент затухания интенсивности звука находится в диапазоне [0,8, 0,96], максимальное число итераций находится в диапазоне [100, 500], и максимальная точность поиска находится в диапазоне [0,01, 0,1];
этап B2: установка функции пригодности и определение исходной оптимального позиции отдельной летучей мыши и числа t итераций, t=1; подстановка веса и порога, соответствующих позиции отдельной летучей мыши, в модель управления очищением внутреннего воздуха на основе серой нейронной сети, получение результата обнаружения с использованием модели управления очищением внутреннего воздуха на основе модели серой нейронной сети, определенной из позиции отдельной летучей мыши, и формирование первой функции пригодности f1(x) (f1(x)=1/(E+1)) с разностью E между результатом обнаружения и действительной ситуацией;
вычисление пригодности позиции каждой отдельной летучей мыши с использованием первой функции пригодности и использование позиции отдельной летучей мыши, соответствующей максимальной пригодности, как исходной оптимальной позиции отдельной летучей мыши;
этап B3: обновление скорости и позиции отдельной летучей мыши с использованием установленной частоты импульсов;
этап B4: если Rand1>ri, случайное возмущение летучей мыши в оптимальной отдельной позиции, чтобы сгенерировать возмущенную позицию отдельной летучей мыши;
причем, Rand1 представляет собой случайное число, равномерно распределенное в [0, 1], и ri является частотой импульсов i-ой летучей мыши;
этап B5: если Rand2>Ai, и качество возмущенной позиции отдельной летучей мыши превосходит пригодность позиции отдельной летучей мыши до возмущения, перемещение отдельной летучей мыши в возмущенную позицию, иначе, сохранение отдельной летучей мыши в исходной позиции;
причем, Rand2 является случайным числом, равномерно распределенным в [0, 1], и Ai является интенсивностью звука i-ой летучей мыши;
этап B6: если условие этапа B5 удовлетворено, обновление частоты импульсов и интенсивности звукового импульса отдельной летучей мыши с использованием коэффициента повышения частоты поиска летучей мыши и коэффициента затухания интенсивности звука и переход к этапу B4, иначе, переход к этапу B7;
этап B7: вычисление пригодности позиции каждой отдельной летучей мыши в текущей стае летучих мышей и выполнение хаотической оптимизации позиции и скорости для верхних m% отдельных летучих мышей в порядке убывания, чтобы получить обновленные верхние m% отдельных летучих мышей, причем m находится в диапазоне [5, 20]; и
этап B8: определение, достигнуто ли максимальное число итераций или максимальная точность поиска; если достигнуто, выбор глобальной оптимальной отдельной летучей мыши из обновленных верхних m% отдельных летучих мышей в соответствии со значением пригодности и вывод оптимального веса и порога модели управления очищением внутреннего воздуха на основе серой нейронной сети, соответствующих глобальной оптимальной отдельной летучей мыши; в противном случае, предположение t=t+1 и возвращение к этапу B3, чтобы продолжить следующую итерацию.
7. Модель мониторинга качества внутреннего воздуха и управления вентиляцией поезда, полученная с использованием способа моделирования для модели мониторинга качества внутреннего воздуха и управления вентиляцией поезда по любому одному из пп. 1-6.
8. Способ для мониторинга качества внутреннего воздуха и управления вентиляцией поезда, содержащий:
этап 6, обнаружение вторых данных обнаружения качества внутреннего воздуха и вторых данных обнаружения качества внешнего воздуха;
этап 7, получение индекса Q0 исчерпывающей оценки внутреннего воздуха с использованием вторых данных обнаружения качества внутреннего воздуха на этапе 6 и получение индекса Q1 исчерпывающей оценки внешнего воздуха с использованием вторых данных обнаружения качества внешнего воздуха на этапе 6; и
этап 8, определение отношения величин между Q0 и Q1, полученными на этапе 7:
если Q0≥Q1, вызов модели мониторинга качества внутреннего воздуха и управления вентиляцией поезда, полученной с использованием способа моделирования для модели мониторинга качества внутреннего воздуха и управления вентиляцией поезда по любому одному из пп. 1-6, чтобы получить требуемый уровень объема вентиляции, и управление системой (501) вентиляции высокоскоростного поезда при помощи уровня объема вентиляции;
в противном случае, вызов модели мониторинга качества внутреннего воздуха и управления вентиляцией поезда, полученной с использованием способа моделирования для модели мониторинга качества внутреннего воздуха и управления вентиляцией поезда по любому одному из пп. 1-6, чтобы получить требуемый уровень объема вентиляции и уровень мощности устройства очищения воздуха, управление системой (501) вентиляции высокоскоростного поезда при помощи уровня объема вентиляции, и управление устройством (502) очищения воздуха при помощи уровня мощности устройства очищения воздуха.
9. Способ для мониторинга качества внутреннего воздуха и управления вентиляцией поезда по п. 8, причем вторые данные обнаружения качества внутреннего воздуха и вторые данные обнаружения качества внешнего воздуха оба содержат одну или более из концентрации CO2, концентрации NO2, концентрации SO2, концентрации PM2.5, концентрации VOC и концентрации пыли.
10. Способ для мониторинга качества внутреннего воздуха и управления вентиляцией поезда по п. 8, причем вторые данные обнаружения качества внутреннего воздуха и/или вторые данные обнаружения качества внешнего воздуха получают посредством режима многоточечного мониторинга.
11. Система моделирования для модели мониторинга качества внутреннего воздуха и управления вентиляцией поезда, содержащая:
модуль (1) обнаружения качества внутреннего воздуха, сконфигурированный, чтобы получать первые данные обнаружения качества внутреннего воздуха;
модуль (2) обнаружения качества внешнего воздуха, сконфигурированный, чтобы получать первые данные обнаружения качества внешнего воздуха;
модуль (3) передачи данных, сконфигурированный, чтобы передавать полученные первые данные обнаружения качества внутреннего воздуха и полученные первые данные обнаружения качества внешнего воздуха на модуль (4) обработки данных;
модуль (4) обработки данных, сконфигурированный для моделирования; причем:
процесс моделирования содержит:
получение индекса Q0 исчерпывающей оценки внутреннего воздуха с использованием первых данных обнаружения качества внутреннего воздуха и получение индекса Q1 исчерпывающей оценки внешнего воздуха с использованием первых данных обнаружения качества внешнего воздуха;
когда Q0≥Q1, обучение модели управления объемом внешнего свежего воздуха в соответствии со следующим процессом:
выбор n1 групп соответствующих первых данных обнаружения качества внутреннего воздуха и соответствующих первых данных обнаружения качества внешнего воздуха как экспериментальных данных;
установка уровня объема вентиляции системы (501) вентиляции поезда на уровень G1;
выполнение вентиляционных экспериментов на поезде при условиях n1 групп экспериментальных данных, чтобы получить минимальный уровень объема вентиляции, который может доводить качество воздуха до значения, благоприятного для здоровья человека, в пределах 5 минут, как метку уровня объема вентиляции, соответствующую каждой группе экспериментальных данных; и
обучение модели управления объемом внешнего свежего воздуха посредством принятия n1 групп экспериментальных данных в качестве входа и принятия меток уровня объема вентиляции, соответствующих n1 группам экспериментальных данных, в качестве выхода, чтобы получить модель управления объемом внешнего свежего воздуха;
когда Q0<Ql, обучение модели управления очищением внутреннего воздуха в соответствии со следующим процессом:
выбор n2 групп соответствующих первых данных обнаружения качества внутреннего воздуха и соответствующих первых данных обнаружения качества внешнего воздуха как экспериментальных данных;
установка уровня объема вентиляции системы (501) вентиляции поезда на уровень G1 и установка уровня мощности устройства (502) очищения воздуха на уровень G2;
выполнение вентиляционных экспериментов на поезде при условиях n2 групп экспериментальных данных, чтобы получить минимальный уровень объема вентиляции и минимальный уровень мощности устройства очищения воздуха, который может доводить качество воздуха до значения, благоприятного для здоровья человека, в пределах 5 минут, причем полученный минимальный уровень объема вентиляции используется как метка уровня объема вентиляции, соответствующая каждой группе экспериментальных данных, и полученный минимальный уровень мощности устройства очищения воздуха используется как метка уровня мощности устройства очищения воздуха, соответствующая каждой группе экспериментальных данных; и
обучение модели управления очищением внутреннего воздуха посредством принятия n2 групп экспериментальных данных в качестве входа и принятия меток уровня объема вентиляции и меток уровня мощности устройства очищения воздуха, соответствующих n2 группам экспериментальных данных, в качестве выхода, чтобы получить модель управления очищением внутреннего воздуха;
модель мониторинга качества внутреннего воздуха и управления вентиляцией поезда включает в себя обученную модель управления объемом внешнего свежего воздуха и обученную модель управления очищением внутреннего воздуха.
12. Система моделирования для модели мониторинга качества внутреннего воздуха и управления вентиляцией поезда,
в которой как модуль (1) обнаружения качества внутреннего воздуха, так и модуль (2) обнаружения качества внешнего воздуха содержат один или более из датчика концентрации CO2, датчика концентрации NO2, датчика концентрации SO2, датчика концентрации PM2.5, датчика концентрации VOC и датчика концентрации пыли.
13. Система моделирования для модели мониторинга качества внутреннего воздуха и управления вентиляцией поезда по п. 11, в которой
модуль (1) обнаружения качества внутреннего воздуха содержит несколько устройств (101) обнаружения качества внутреннего воздуха, и устройство (101) обнаружения качества внутреннего воздуха расположено в голове, середине и хвосте каждого купе, соответственно;
модуль (2) обнаружения качества внешнего воздуха содержит несколько устройств (201) обнаружения качества внешнего воздуха, и устройство (201) обнаружения качества внешнего воздуха расположено во внешнем воздухозаборнике каждого вентиляционного короба каждого купе; и
каждые три купе совместно используют модуль (4) обработки данных.
14. Система моделирования для модели мониторинга качества внутреннего воздуха и управления вентиляцией поезда по п. 11, в которой модуль (3) передачи данных содержит модуль (301) беспроводной передачи.
15. Система мониторинга качества внутреннего воздуха и управления вентиляцией поезда, содержащая систему моделирования для модели мониторинга качества внутреннего воздуха и управления вентиляцией поезда по любому одному из пп. 11-14, в которой:
модуль (1) обнаружения качества внутреннего воздуха также сконфигурирован, чтобы получать первые данные обнаружения качества внутреннего воздуха;
модуль (2) обнаружения качества внешнего воздуха также сконфигурирован, чтобы получать первые данные обнаружения качества внешнего воздуха;
модуль (3) передачи данных также сконфигурирован, чтобы передавать полученные первые данные обнаружения качества внутреннего воздуха и полученные первые данные обнаружения качества внешнего воздуха на модуль (4) обработки данных;
модуль (4) обработки данных также сконфигурирован для управления; причем:
процесс управления содержит:
получение вторых данных обнаружения качества внутреннего воздуха и вторых данных обнаружения качества внешнего воздуха;
получение индекса Q0 исчерпывающей оценки внутреннего воздуха с использованием вторых данных обнаружения качества внутреннего воздуха и получение индекса Q1 исчерпывающей оценки внешнего воздуха с использованием вторых данных обнаружения качества внешнего воздуха;
если Q0≥Q1, вызов модели управления объемом внешнего свежего воздуха, чтобы получить требуемый уровень объема вентиляции, и управление системой (501) вентиляции высокоскоростного поезда при помощи уровня объема вентиляции;
в противном случае, вызов модели управления очищением внутреннего воздуха, чтобы получить требуемый уровень объема вентиляции и уровень мощности устройства очищения воздуха, управление системой (501) вентиляции высокоскоростного поезда при помощи уровня объема вентиляции и управление устройством (502) очищения воздуха при помощи уровня мощности устройства очищения воздуха; и
дополнительно содержащая модуль (5) управления вентиляцией, который содержит систему (501) вентиляции и устройство (502) очищения воздуха; причем система (501) вентиляции сконфигурирована, чтобы вентилировать поезд в соответствии с уровнем объема вентиляции, выведенным модулем (4) обработки данных, и устройство (502) очищения воздуха сконфигурировано, чтобы очищать воздух в поезде в соответствии с уровнем мощности устройства очищения воздуха, выведенным модулем (4) обработки данных.
| CN 106777863 A, 31.05.2017 | |||
| CN 107477782 A, 15.12.2017 | |||
| CN 108572648 A, 25.09.2018 | |||
| СЕНСОРНАЯ СИСТЕМА ДЛЯ ПЕРЕКЛЮЧЕНИЯ ВЕНТИЛЯЦИОННЫХ СИСТЕМ В ТРАНСПОРТНЫХ СРЕДСТВАХ | 1995 |
|
RU2236035C2 |
| СПОСОБ КОМПЬЮТЕРНОГО МОДЕЛИРОВАНИЯ ТЕХНИЧЕСКОЙ СИСТЕМЫ | 2012 |
|
RU2575417C2 |

