ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее техническое решение относится к области систем отопления, вентиляции и кондиционирования (ОВиК), а точнее, к способу адаптивного автоматизированного управления микроклиматом в системах отопления, вентиляции и кондиционирования.
УРОВЕНЬ ТЕХНИКИ
[0002] Климат различных помещений определяется большим количеством переменных, например уровнем средней температуры, распределением температуры, наличием тока воздуха или скоростью движения воздуха, уровнем влажности в помещении, вырабатываемой тепловой энергией устройств, размещенных в помещении, интенсивностью освещения и т.д. Для управления климатическими условиями в таких помещениях в настоящее время устанавливаются системы отопления, вентиляции и кондиционирования воздуха (ОВиК). Указанные системы предназначены для таких целей, как создание и поддержание комфортного для человека, растений, животных или материальных предметов (оборудования, произведений искусства и т.п.) микроклимата в пределах здания или сооружения; экономии энергии, затрачиваемой на создание и поддержание микроклимата и т.д.
[0003] При управлении такими системами ОВиК существует ряд проблем, связанных с невозможностью корректного управления контроллером системы ОВиК, например, ввиду внешних возмущений, действующих на объект, или невозможностью оперативного реагирования на изменения микроклимата на объекте и т.д., что, как следствие, приводит к повышенному энергопотреблению системы ОВиК и ее некорректной работе. Кроме того, неспособность системы ОВиК поддерживать требуемые параметры микроклимата также может существенно влиять на сам объект, что может привести к серьезным последствиям, например, выходу из строя различного рода оборудования и т.д. Таким образом, управление системой ОВиК является важной и существенной задачей.
[0004] Из уровня техники известно решение, раскрытое в патенте на изобретение РФ № RU 2692155 С2 (ФОРД ГЛОУБАЛ ТЕКНОЛОДЖИЗ, ЭлЭлСи), опубл. 21.06.2019.
Указанное решение описывает способ управления системой ОВиК транспортного средства. Управление системой ОВиК выполняется на основе прогнозируемого времени поездки пользователя, полученного от системы навигации. При превышении времени уставки заданной системе ОВиК температуры расчетного времени поездки, контроллер подает управляющий сигнал на изменение параметров системы ОВиК для достижения температуры уставки в соответствии с расчетным временем.
[0005] Недостатками указанного решения является низкая степень адаптации параметров микроклимата системы ОВиК к возмущениям, действующим на транспортное средство, отсутствие возможности учета важных параметров, связанных с микроклиматом и, как следствие повышенное энергопотребление системы ОВиК. Кроме того, указанное решение не предполагает возможность адаптивной настройки системы ОВиК для корректного и точного поддержания заданных параметров микроклимата.
[0006] Общими недостатками существующих решений является отсутствие эффективной возможности адаптивного управления системой ОВиК, обеспечивающего низкое потребление энергии системой ОВиК и точное управление параметрами микроклимата даже при внешних возмущениях, действующих на объект.Кроме того, такого рода решение должно обеспечивать поддержку требуемых параметров микроклимата на объекте с высокой точностью и обладать возможностью реагирования на любые воздействия, связанные с параметрами микроклимата объекта.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
[0007] Данное техническое решение направлено на устранение недостатков, присущих существующим решениям, известным из уровня техники.
[0008] Заявленное решение позволяет решить техническую проблему в части создания нового и эффективного способа адаптивного управления системой отопления, вентиляции и кондиционирования.
[0009] Техническим результатом, достигающимся при решении данной проблемы, является повышение эффективности управления системой ОВиК.
[0010] Указанный технический результат достигается благодаря осуществлению способа адаптивного автоматизированного управления системой отопления, вентиляции и кондиционирования (ОВиК), содержащей по меньшей мере один контроллер, при этом способ выполняется с помощью блока управления и содержит этапы, на которых:
а) получают данные о состоянии заданной зоны, содержащие по меньшей мере данные микроклимата в заданной зоне, и сохраняют полученные данные в буфер памяти блока управления;
b) выполняют векторизацию и нормализацию данных, полученных на этапе а) за заданный временной период, и сохраняют их в буфер памяти блока управления;
c) формируют выборки данных одного размера на основании данных, собранных на этапе Ь), взятых в случайные моменты времени работы системы ОВиК;
d) формируют целевые значения модели машинного обучения (ЦЗММО), определяющие выбор управляющих действий для по меньшей мере одного контроллера системы ОВиК, с помощью по меньшей мере одного первого блока модели машинного обучения (БММО 1), содержащего по меньшей мере одну нейронную сеть (НС), при этом БММО 1 принимает на вход выборки данных, полученные на этапе с);
e) выполняют обучение по меньшей мере одного второго блока модели машинного обучения (БММО 2), содержащего по меньшей мере одну НС, на выборках данных, полученных на этапе с), и ЦЗММО, полученных с выхода по меньшей мере одного БММО 1 на этапе d);
f) копируют веса синапсов НС БММО 2 в НС БММО 1;
g) осуществляют обработку текущих данных микроклимата, расположенных в буфере памяти блока управления, с помощью по меньшей мере одного БММО 2, в результате которой получают по меньшей мере одно спрогнозированное значение управляющего действия системы ОВиК;
h) передают спрогнозированное управляющее действие в контроллер систему ОВиК и изменяют по меньшей мере один параметр работы системы ОВиК в заданной зоне.
[0011] В одном из частных вариантов реализации способа данные микроклимата на этапе а) получают, по меньшей мере, от одного внешнего датчика, расположенного в заданной зоне и подключенного к блоку управления.
[0012] В другом частном варианте реализации способа данные микроклимата на этапе а) получают из хранилища данных, выполненного в виде базы данных или памяти системы ОВиК, или памяти блока управления, или носителя данных.
[0013] В другом частном варианте реализации способа данные микроклимата на этапе а) дополнительно записывают в постоянную память блока управления.
[0014] В другом частном варианте реализации способа данные микроклимата на этапе а) включают в себя параметры изменения климата, включающие в себя по меньшей мере одно из: данные о температуре в заданной зоне, данные о влажности воздуха в заданной зоне, данные о внешней температуре, данные о солнечной активности, данные об очереди сетевого балансировщика нагрузки, данные об используемой пиковой или интегральной мощности потребляемой электроэнергии или их сочетания.
[0015] В другом частном варианте реализации способа каждая из БММО 1 и БММО2 содержит управляющую нейронную сеть (УНС 1, УНС 2) и премирующую нейронную сеть (ПНС 1, ПНС 2).
[0016] В другом частном варианте реализации способа ЦЗММО формируют с помощью ПНС 1, обученной на выборках данных, полученных на этапе с) и вспомогательного набора входных данных, полученного с помощью УНС 1.
[0017] В другом частном варианте реализации способа вспомогательный набор входных данных формируют с помощью УНС 1 на выборках данных, полученных на этапе с).
[0018] В другом частном варианте реализации способа обучение УНС 2 выполняют на выборках данных, полученных на этапе с) и обученной ПНС 2.
[0019] В другом частном варианте реализации способа обучение ПНС 2 выполняют на выборках данных, полученных на этапе с), и ЦЗММО, полученных с помощью ПНС 1.
[0020] В другом частном варианте реализации способа на этапе g) обработку текущих данных микроклимата, расположенных в буфере памяти блока управления, осуществляют с помощью по меньшей мере одной УНС 2.
[0021] Кроме того, заявленный технический результат достигается за счет устройства адаптивного автоматизированного управления системой отопления, вентиляции и кондиционирования, содержащее
- по меньшей мере один процессор или программируемую логическую интегральную схему (ПЛИС), или интегральную схему специального назначения (ИССН); и
- по меньшей мере один модуль памяти, соединенный с процессором или ПЛИС или ИССН, который содержит машиночитаемые инструкции, которые при их выполнении процессором ПЛИС или ИССН обеспечивают выполнение способа.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0022] Признаки и преимущества настоящего изобретения станут очевидными из приводимого ниже подробного описания изобретения и прилагаемых чертежей.
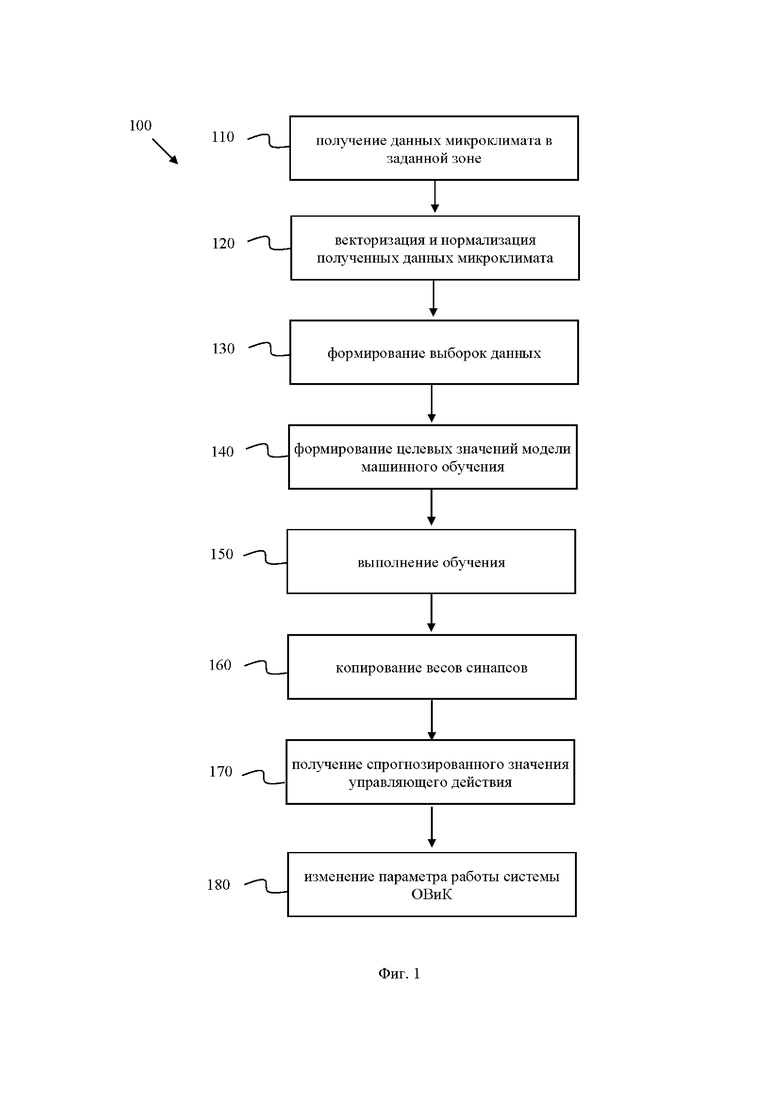
[0023] Фиг. 1 иллюстрирует блок-схему способа адаптивного автоматизированного управления системой отопления, вентиляции и кондиционирования.
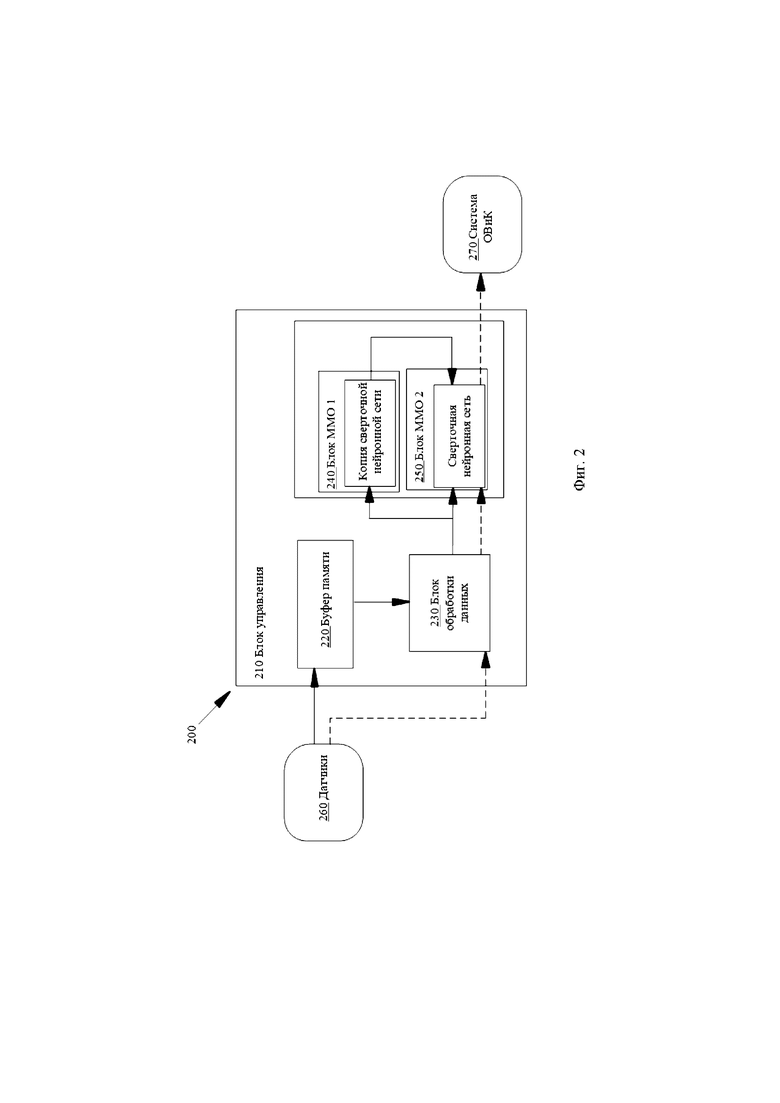
[0024] Фиг. 2 иллюстрирует пример общего вида устройства адаптивного управления системой отопления, вентиляции и кондиционирования.
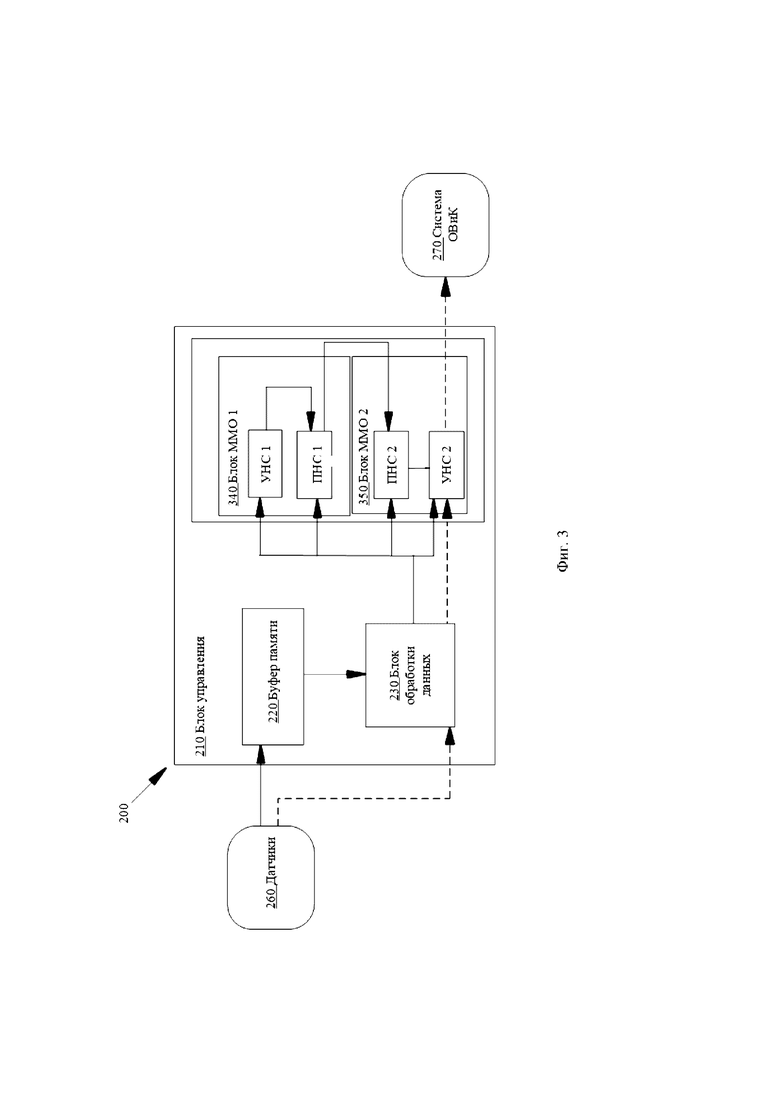
[0025] Фиг. 3 иллюстрирует другой пример общего вида устройства адаптивного управления системой отопления, вентиляции и кондиционирования.
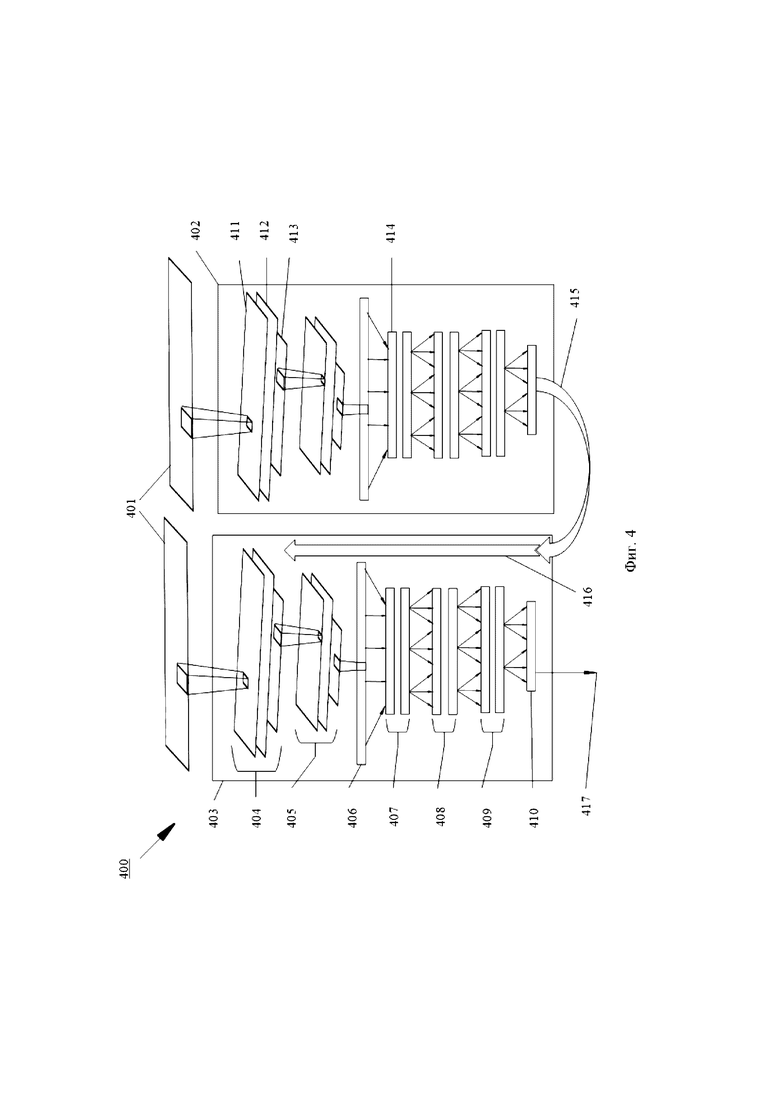
[0026] Фиг. 4 иллюстрирует архитектуру модели машинного обучения, предназначенную для прогнозирования управляющего действия для системы отопления, вентиляции и кондиционирования.
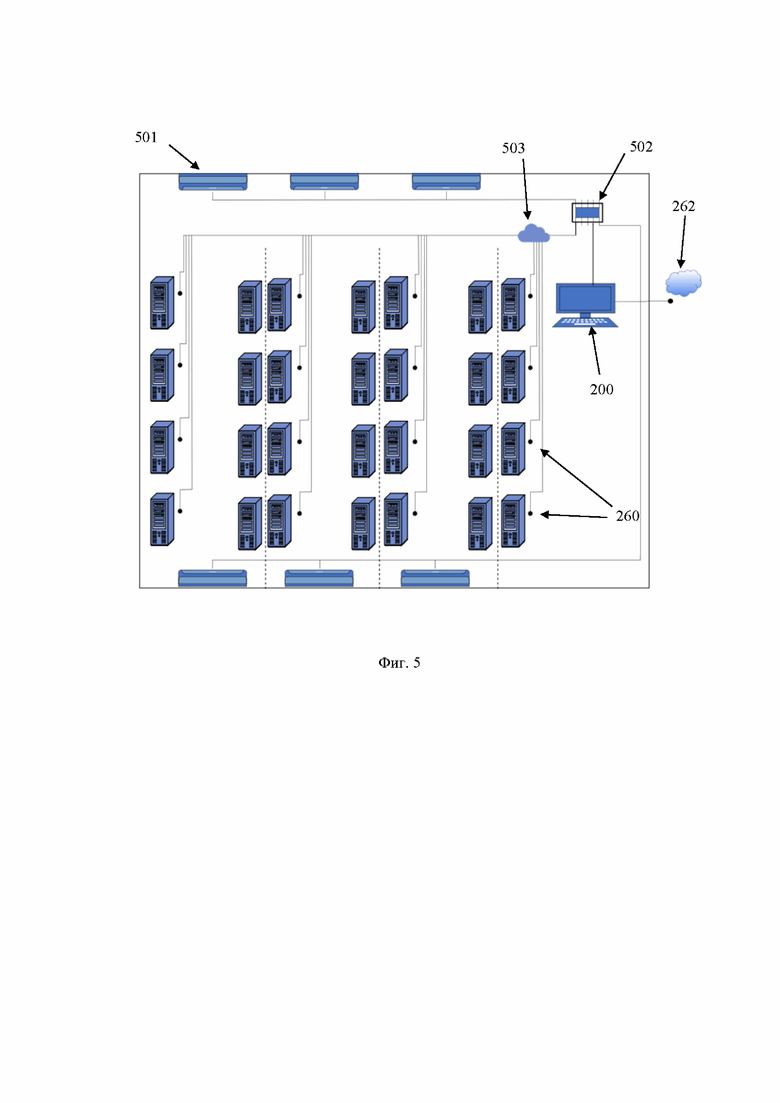
[0027] Фиг. 5 иллюстрирует пример реализации системы адаптивного управления в центре обработки данных.
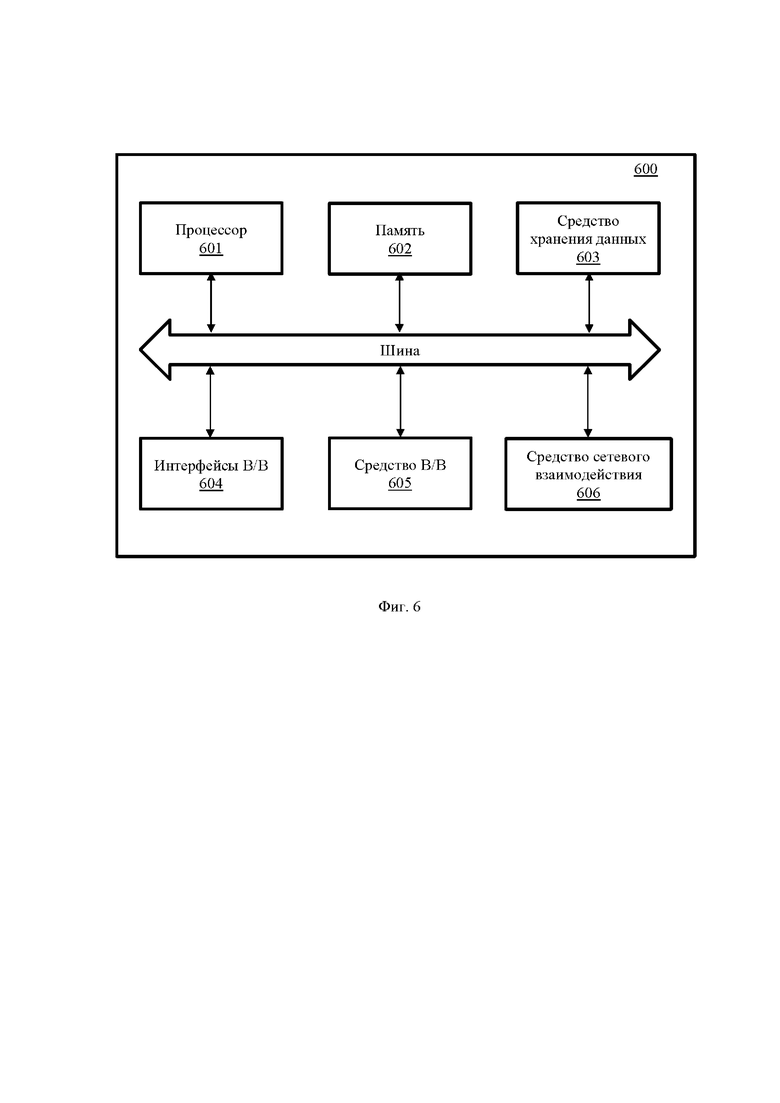
[0028] Фиг. 6 иллюстрирует пример общего вида вычислительного устройства, которое обеспечивает реализацию заявленного решения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0029] Ниже будут описаны понятия и термины, необходимые для понимания данного технического решения.
[0030] Отопление, вентиляция и кондиционирование (ОВиК), также HVAC (Heating, Ventilation, & Air Conditioning) - технология поддержания в заданных пределах параметров микроклимата, таких как воздух, температура, влажность и т.д., в заданной зоне.
[0031] Модель в машинном обучении (МО) - совокупность методов искусственного интеллекта, характерной чертой которых является не прямое решение задачи, а обучение в процессе применения решений множества сходных задач.
[0032] Заявленное техническое решение предлагает новый подход, обеспечивающий повышение эффективности управления системой ОВиК, и, как следствие, снижение потребляемой энергии системой ОВиК, за счет автоматизированного адаптивного управления указанной системой ОВиК. Кроме того, указанное решение также обеспечивает возможность реагирования на внешние возмущения, оказываемые на заданную зону и управления параметрами микроклимата в соответствии с такими возмущениями. Кроме того, заявленное решение также обеспечивает возможность высокоточной поддержки требуемых параметров микроклимата в заданной зоне, за счет реализации модели машинного обучения, определяющей прогнозируемое значение управляющего действия для системы ОВиК.
[0033] Заявленное техническое решение может быть реализовано с помощью устройства адаптивного автоматизированного управления 200 системой отопления, вентиляции и кондиционирования, которое более подробно раскрыто на Фиг. 6.
[0034] На Фиг. 1 представлена блок схема способа 100 адаптивного автоматизированного управления системой отопления, вентиляции и кондиционирования (ОВиК), который раскрыт поэтапно более подробно ниже. Указанный способ 100 заключается в выполнении этапов, направленных на обработку различных цифровых данных. Обработка, как правило, выполняется с помощью элементов устройства 200, таких как блок управления 210, выполненный в виде, например, процессора, графического процессора (GPU), вычислительного модуля и т.д. Более подробно элементы устройства 200 раскрыты на Фиг.6.
[0035] На этапе 110 получают данные о состоянии заданной зоны.
[0036] На указанном этапе 110 устройство 200 получает данные о состоянии заданной зоны, которые содержат по меньшей мере данные микроклимата в заданной зоне, например, от датчиков, расположенных в указанной зоне, и сохраняет в свою память. В другом частном варианте осуществления данные микроклимата могут быть получены из памяти устройства 200, например, из постоянной памяти. Кроме того, данные микроклимата также могут быть получены непосредственно от системы ОВиК, например, по каналу передачи, такому как Интернет. В еще одном частном варианте осуществления полученные данные микроклимата сохраняются в буфер памяти блока управления 210. Буфер памяти может представлять собой место в оперативной памяти компьютера, предназначенное для промежуточного хранения любого вида информации.
[0037] Сбор и/или получение параметров микроклимата устройством 200 может осуществляться в заданный временной период. Так, при первичном подключении устройства 200 в систему ОВиК, устройство 200, в одном частном варианте осуществления, выполняет сбор параметров микроклимата зоны, например, первые 48 часов, 72 часа и т.д. В указанный временной период устройство 200 не выполняет никаких действий, а только собирает состояния системы ОВиК, при этом с достаточной точностью фиксирует разницу реальных параметров (полученных, например, от датчиков) и температурной уставки системы ОВиК. На основании этих данных собирается статистика изменений параметров микроклимата в заданной зоне и формируется база данных, реализованная, например, в памяти устройства 200. Указанные данные могут быть использованы, например, для последующего детального выявления корреляций между ними. В текущем контексте под корреляциями понимается зависимость изменения нескольких параметров микроклимата от возмущений, воздействующих на заданную зону. Так, например, при увеличении нагрузки на сервер, увеличивается температура в заданной зоне, где расположен указанный сервер. Другими словами, выявление корреляций необходимо для нахождения зависимости между воздействующим на зону возмущением и параметрами микроклимата указанной зоны.
[0038] Датчики могут представлять собой внешние датчики, выполненные с возможностью мониторинга параметров микроклимата и передачи полученных параметров на устройство 200. Так, датчики могут представлять собой, например, датчики температуры как внутризональные, так и датчики температуры окружающей среды, датчики влажности, датчики освещенности, датчики интенсивности солнечного излучения и т.д. Специалисту в данной области техники будет очевидно, что могут применяться любые известные из уровня техники датчики. Кроме того, передача датчиками параметров микроклимата может осуществляться как беспроводным, так и проводным способом. В случае применения проводных датчиков, указанные датчики могут быть подключены к устройству 200 посредством интерфейса, например, USB (Universal Serial Bus - «универсальная последовательная шина»). При использовании беспроводных датчиков подключение может быть осуществлено, например, с использованием технологии LoRaWAN, Wi-Fi, Bluetooth и т.д.
[0039] Параметрами микроклимата могут являться по меньшей мере следующие параметры: данные о температуре в заданной зоне, данные о влажности воздуха в заданной зоне. Кроме того, данные о состоянии заданной зоны также могут включать внешние параметры, влияющие на микроклимат в заданной зоне. Так, внешними параметрами могут являться, например, данные о внешней температуре, данные об инсоляции (данные солнечной активности), данные об очереди сетевого балансировщика нагрузки, данные о используемой пиковой или интегральной мощности потребляемой электроэнергии или их сочетания и т.д. Указанные внешние параметры также могут быть получены с помощью соответствующих датчиков и/или удаленно загружены на устройство 200. Стоит отметить, что под внешними параметрами микроклимата в заданной зоне подразумеваются любые возмущения, способные выделять и поглощать энергию в контролируемой зоне. Так, например, солнечная энергия способна нагревать стены объекта, что приводит к изменению температур в климатических зонах объекта, в частности, в контролируемой зоне. Кроме того, возможен перенос энергии из прилегающих зон, например, через стену, что может повлиять на температуру в заданной (контролируемой) зоне. Учет таких внешних параметров не только обеспечивает высокую точность управления параметрами микроклимата в зоне, но и также позволяет эффективно осуществлять централизованное управление системами ОВиК различных зон на одном объекте, что особенно полезно в крупных объектах, таких как небоскребы, заводы и т.д. Таким образом, внешними параметрами, влияющими на параметры микроклимата, в частности, могут являться параметры, приводящие к поглощению или выделению энергии (Джоулей).
[0040] Стоит отметить, что под заданной зоной в данном решении следует понимать замкнутое и/или незамкнутое пространство. Так, например, незамкнутое пространство может представлять собой виртуальную зону, характеризующуюся виртуальными границами, например, зона климатического контроля пассажира в автомобиле. Замкнутое пространство может представлять, например, помещение, комнату, промышленный объект, центр обработки данных, и т.д. Таким образом, под заданной зоной в данном решении понимается любое ограниченное, как логически, так и физически, пространство.
[0041] Таким образом, на этапе 110 выполняют получение данных о состоянии заданной зоны и далее способ 100 переходит на этап 120.
[0042] На этапе 120 выполняют векторизацию и нормализацию данных, полученных на этапе 110 за заданный временной период, и сохраняют их в буфер памяти блока управления. Указанный этап также может быть выполнен блоком управления 210.
[0043] Для подготовки полученных на этапе 110 данных к использованию по меньшей мере в одной модели машинного обучения, указанные данные должны быть преобразованы в определенный вид. Так, данные с датчиков могут представлять собой некоторые числовые значения, которые необходимо преобразовать в тензорный вид. Для этого полученные данные разделяются на группы и распределяются по массивам, что и является вектором. Процесс представления данных в тензорном виде известен из уровня техники, например, в [1]. В свою очередь, нормализация данных - это процедура предобработки входной информации (обучающих, тестовых и валидационных выборок, а также реальных данных), при которой значения признаков во входном векторе приводятся к некоторому заданному диапазону, например, [0…1] или [-1…1] и т.д. Нормализация полученных на этапе 110 данных может быть выполнена, например, с помощью алгоритмов нормализации, таких как StandartScaling или MinMax Scaling и т.д.
[0044] В одном частном варианте осуществления векторизация и нормализация данных микроклимата может быть осуществлена за выбранный временной период, например, за 24 часа, 48 часов и т.д. Как было указано выше, устройство 200 может накапливать периодически поступающие данные, например, от датчиков, в буфере памяти. В другом частном варианте осуществления данные микроклимата могут быть сохранены в базе данных, которая может являться частью устройства 200 и/или располагаться на сервере. Далее, на основе выбранного временного периода устройство 200 может извлекать данные, соответствующие такому периоду, и выполнять их векторизацию и нормализацию. После векторизации и нормализации данных микроклимата за заданный временной период, преобразованные данные сохраняются в буфер памяти, например, в базу данных, представленную в виде трехмерного тензора. Стоит отметить, что буфер памяти может быть разделен на несколько логических областей, что исключает перезаписывание и/или наложение обработанных и необработанных данных.
[0045] Далее способ 100 переходит к этапу 130.
[0046] На этапе 130 формируют выборки данных одного размера на основании данных, собранных на этапе 120, взятых в случайные моменты времени работы системы ОВиК.
[0047] На указанном этапе 130 из данных, полученных на этапе 120, формируется множество наборов параметров микроклимата, соответствующих конкретному времени работы системы ОВиК (выборки данных). В одном частном варианте осуществления выборки данных могут дополнительно включать внешние параметры, влияющие на микроклимат в заданной зоне. Хотя в приведенных примерах используется термин параметры микроклимата, специалисту должно быть очевидно, что в любом этапе, задействующим параметры микроклимата, также могут быть задействованы и внешние параметры, которые могут прямо или косвенно влиять на микроклимат в контролируемой зоне в рамках осуществления заявленного решения. В еще одном частном варианте осуществления выборки данных могут быть сформированы одинакового размера, но в разные моменты времени. Указанные выборки предназначены для обеспечения точного процесса обучения модели машинного обучения [2-4].
[0048] Кроме того, в память устройства 200 также могут сохраняться действия, выполненные системой ОВиК по результатам полученных параметров микроклимата. Так, действием может являться одно и то же действие, выдаваемое контроллером системы ОВиК, например ПИД-регулятором в соответствии с его базовыми настройками (например изменение температуры при отклонении от заданной больше, чем на пороговую величину). При первичном сборе параметров микроклимата, например, при первом запуске системы ОВиК, не имеющей никаких предопределенных настроек, в качестве действия может рассматриваться бездействие системы ОВиК. Кроме того, в еще одном частном варианте осуществления память может быть заполнена смоделированными действиями. С учетом вышесказанного, выбор данных может быть осуществлен из множества всех записанных в память устройства 200 измерений параметров микроклимата и действий, совершенных системой ОВиК по результатам измерений. Так, из всех записанных измерений и действий выбираются определенные наборы параметров, например, температура за определенный промежуток времени, влажность за определенный промежуток времени, выбранное действие, которое привело к температуре за выбранное время и т.д., взятые в случайные моменты времени. Действием может являться действие, выдаваемое контроллером системы ОВиК в соответствии с текущими параметрами микроклимата. Таким образом выборки являются случайными (случайно выбранными наборами из памяти), но заданного размера (например, 64 случайно выбранных набора), состоящими из определенных наборов данных. Случайный выбор обусловлен особенностью обучения модели машинного обучения. Если при обучении будут одни и те же данные, или они будут часто повторяться, то это приведет к неравномерному обучению модели.
[0049] Сформированные выборки данных сохраняются в памяти устройства 200, и далее поступают на входы блоков моделей машинного обучения (БММО 1 и БММО 2), т.е. используются как входные данные для моделей машинного обучения.
[0050] Так, на этапе 140 выполняют формирование целевых значений модели машинного обучения (ЦЗММО), которые определяют выбор управляющих действий для по меньшей мере одного контроллера системы ОВиК, с помощью по меньшей мере одного первого блока модели машинного обучения (БММО 1), содержащего по меньшей мере одну нейронную сеть (НС), при этом БММО 1 принимает на вход выборки данных, полученные на этапе 130.
[0051] ЦЗММО представляют собой данные, характеризующие предиктивные управляющие действия системы ОВиК, полученные в ходе обработки первым блоком модели машинного обучения (БММО 1) накопленных данных параметров микроклимата (выборками данных), сохраненными в памяти устройства 200. ЦЗММО необходимы для осуществления обучения нейронной сети (БММО 2) с подкреплением, которая и определяет прогнозирующее управляющие действия. Ключевая задача БММО 1 заключается в хранении весов БММО 2 за предыдущие этапы обучения. Это достигается при помощи полного копирования весов нейронной сети БММО 2 в нейронную сеть БММО 1 с определенным интервалом времени. После того, как веса нейронной сети БММО 2 скопированы в нейронную сеть БММО 1, указанная нейронная сеть БММО 1 не изменяется и не обучается, а генерирует новые состояния управляющих действий, исходя из скопированных весов.
[0052] Указанные БММО 2 и БММО 1 необходимы для повышения точности обучения, и, как следствие, повышения точности предсказания требуемых управляющих действий для системы ОВиК. БММО 2 и БММО 1 формируют оценку ("полезность", "выгодность") того или иного действия, примененного к системе в том или ином состоянии (состояние описывается данными с датчиков). Так, оценкой, в одном частном варианте осуществления, может являться эффективность энергопотребления (PUE) или расход электроэнергии, или температура и т.д. Поскольку веса в БММО 1 сохранены от БММО 2 с некоторым интервалом времени, после обработки полученных выборок данных, каждая из указанных нейронных сетей БММО 2 и БММО 1 выдает свою оценку. ЦЗММО - это желаемая (целевая) оценка ("полезность", "выгодность"). Указанное значение ЦЗММО используется в процессе обучения НС БММО 2. БММО 2 берет эту желаемую оценку и сравнивает со своей оценкой, полученной по результатам обработки выборок данных и, в зависимости от несоответствия между этими оценками (желаемой и имеющейся в наличии), НС БММО 2 изменяет свои собственные веса, например, с помощью метода стохастического градиентного спуска.
[0053] Нейронная сеть БММО 1 может представлять собой, например, сверточную нейронную сеть или ансамбль сверточных нейронных сетей. Архитектура БММО 1 более подробно раскрыта на Фиг. 4. В одном частном варианте осуществления БММО 1 может содержать управляющую нейронную сеть (УНС 1) и премирующую нейронную сеть (ПНС 1). В таком варианте реализации ЦЗММО формируются с помощью ПНС 1, которая принимает на вход выборки данных, полученные на этапе 130 и вспомогательный набор входных данных, который получен с помощью УНС 1, которая принимает на вход выборки данных, полученные на этапе 130. Стоит отметить, что БММО 1 может являться как программно-аппаратным, так и программным модулем в составе устройства 200.
[0054] ЦЗММО, в одном частном варианте осуществления, рассчитываются по формуле Беллмана:

где
r - награды (значения премирования),
Q - значения с выхода БММО 1 при подаче на его вход s и а (содержатся в сформированной выборке данных),
s - данные с датчиков,
а - соответствующие исполненные действия.
[0055] Стоит отметить, что под наградой может пониматься некий диапазон чисел, который присуждается выполненному действию в зависимости от точности такого действия. Так, если контроллер системы ОВиК получил данные с датчиков об изменении температуры, однако его управляющее действие не привело к нормализации температуры, то, соответственно, награда будет низкой и т.д.
[0056] Далее сформированные ЦЗММО поступают на вход БММО 2 (этап 150).
[0057] На этапе 150 выполняют обучение по меньшей мере одного второго блока модели машинного обучения (БММО 2), содержащего по меньшей мере одну НС, на выборках данных, полученных на этапе 130, и ЦЗММО, полученных с выхода по меньшей мере одного БММО 1 на этапе 140.
[0058] Для обучения БММО 2 необходимо по меньшей мере два набора данных, включающих в себя следующие части: входные данные для БММО 2 и выходные данные для БММО 2. Входные данные и выходные данные используются для обновления весов нейронной сети БММО 2, например, методом стохастического градиентного спуска. Также на основе входных данных формируются предиктивные данные управляющих действий системы ОВиК. Выходными данными являются ЦЗММО, полученные от БММО 1 на этапе 140. Входными данными являются выборки данных, полученные на этапе 130. Так обновление весов НС БММО 2 может осуществляться, используя внутреннюю метрику нейронной сети (например, математические метрики L2 ("евклидова метрика") или L1 ("манхетанское расстояние")), на которых происходит сравнение насколько соответствуют входные данные выходным данным. В зависимости от несоответствия входных и выходных данных формируется с помощью внутренней метрики нейронной сети градиент обучения. Градиент обучения используется для изменения весов нейронной сети методом стохастического градиентного спуска.
[0059] Нейронная сеть БММО 2 может представлять собой, например, сверточную нейронную сеть или ансамбль сверточных нейронных сетей. Как упоминалось выше, нейронные сети БММО 1 и БММО 2 являются идентичными в отношении архитектуры, за исключением разницы в значениях весов синапсов, что позволяет учитывать ошибку весов НС БММО 2 используя предиктивные управляющие действия полученные с НС БММО 1, которая в свою очередь учитывает такие управляющие действия системы ОВиК за предыдущие промежутки времени. Как указывалось выше, структура БММО 2 и БММО 1 отличается, а именно в силу того, что копирование весов происходит лишь иногда, значения весов НС БММО 2 и НС БММО 1 разные большую часть времени. Указанное решение позволяет существенно улучшить весь процесс обучения [2-3]. Обучение БММО 2 может выполняться, например, методом машинного обучения, например, алгоритмом обратного распространения ошибки. В качестве алгоритма оптимизации обучения может быть выбран алгоритм Adam с динамически изменяемой скоростью обучения. Архитектура нейронной сети БММО 2 представлена на фиг.4 и раскрыта более подробно ниже.
[0060] Кроме того, в одном частном варианте осуществления БММО 2 может содержать управляющую нейронную сеть (УНС 2) и премирующую нейронную сеть (ПНС 2). В таком варианте реализации обучение УНС 2 выполняется на выборках данных, полученных на этапе 130 и выходных данных ПНС 2. В свою очередь, ПНС 2 обучается на выборках данных, полученных на этапе 130, и ЦЗММО, полученных с помощью ПНС 1. БММО 2, также как и БММО 1 может являться как программно-аппаратным, так и программным модулем в составе устройства 200.
[0061] После обучения БММО 2, выполняется копирование весов синапсов из по меньшей мере одной нейронной сети блока БММО 2 в нейронную сеть блока БММО 1 (этап 160).
[0062] На этапе 160 осуществляют копирование весов синапсов НС БММО 2 в НС БММО 1. Так, ЦЗММО и выборки данных, полученные на этапе 130, используются для обновления весов синапсов по меньшей мере одной нейронной сети БММО 2 методом стохастического градиентного спуска. Так копирование весов может быть полным и происходить не каждую итерацию, а лишь в раз несколько итераций с частотой v. Другой способ состоит в том, что копируется в БММО 1 взвешенная сумма текущих весов БММО 2 и весов БММО 1:

P - параметр степени влияния весов БММО 2 на веса БММО 1.
θ - соответствующие каждому блоку ММО веса синапсов.
[0063] Указанный этап 160, как описывалось выше, необходим для снижения времени обучения системы и повышения эффективности предсказания управляющего действия, и, как следствие, повышения точности управления контроллером ОВиК. Далее способ 100 переходит к этапу 170.
[0064] На этапе 170 осуществляется обработка текущих данных микроклимата, расположенных в буфере памяти блока управления, с помощью по меньшей мере одного БММО 2, в результате которой получают по меньшей мере одно спрогнозированное значение управляющего действия системы ОВиК.
[0065] На указанном этапе 170, на вход НС БММО 2 поступают текущие обработанные (векторизованные и нормализованные) данные микроклимата. Указанные данные, могут быть получены в реальном или близком к реальному времени, обработаны и направлены в буфер памяти. Обученная на этапе 160 БММО 2 выполняет прогнозирование управляющего действия. Так, прогнозирование управляющего действия может представлять собой сгенерированную матрицу действий, которая, в свою очередь, является распределением вероятностей выбора программно-заложенных управляющих действий. Действие - это число, которое может изменяться по функциональной зависимости. Так, действие это может быть число и/или набор чисел, которое загружается в контроллер и представляет собой параметр контроллера, такого, как ПИД контроллер, ПИ контроллер и т.д. В одном частном варианте реализации действие представляет собой умножение поэлементно заданных в конфигурации шагов дискретизации пропорционального, интегрального и дифференцирующего коэффициентов регулятора (ПИД регулятор) со значениями выходов НС БММО 2.
[0066] Полученное спрогнозированное управляющее действие транслируется в систему ОВиК.
[0067] На этапе 180 выполняют передачу спрогнозированного управляющего действия в систему ОВиК и изменяют по меньшей мере один параметр работы системы ОВиК в заданной зоне.
[0068] Спрогнозированное управляющее действие транслируются в систему ОВиК и изменяет по меньшей мере один параметр работы системы ОВиК в заданной зоне и сохраняется в память устройства 200, например, в буфер памяти. Стоит отметить, что указанный процесс (этапы 110-180) может повторяться через определенный заданный временной интервал.
[0069] Так, в одном частном варианте осуществления, устройство 200 выполнено с возможностью отправки управляющего сигнала, который содержит спрогнозированное управляющее действие, например, требуемую уставку температуры, интенсивность работы вентиляции и т.д., на контроллер системы ОВиК, который, соответственно, настраивает работу системы ОВиК на основе принятого сигнала.
[0070] Передача управляющего действия может осуществляться, например, с помощью беспроводных каналов передачи, проводных каналов передачи.
[0071] Теперь рассмотрим более подробно один пример архитектуры нейронной сети БММО 1 и БММО 2, показанный на Фиг.4. Указанная архитектура приведена только в качестве примера и не должна ограничивать варианты реализации заявленного технического решения.
[0072] Как видно на Фиг.4 НС БММО 1 402 и НС БММО 2 403 имеют идентичную архитектуру. Для обучения каждой из НС 402 и 403 на входы подаются данные 401, которые являются выборками данных, полученными на этапе 130. Каждая из НС 402 и 403 включает в себя первый и второй каскады сверточных слоев (404 и 405). Каждый из этих каскадов состоит из сверточного слоя Convolution2D 411 с различными функциями активации, после которого идет слой усреднения данных MaxPooling2D 412, а затем слой деактивации нейронов Dropout 413 для устранения переобучения нейронной сети.
[0073] После сверточных каскадов 404 и 405 следует слой векторизации Flatten 406, который преобразовывает многомерные матрицы со сверточных каскадов в вектор для полносвязных каскадов.
[0074] В архитектуре присутствуют три полносвязных каскада первый 407, второй 408 и третий 409, которые идут после слоя векторизации. Каждый из полносвязных каскадов состоит из двух частей, а именно полносвязный слой Dense 414 с функцией активации (см., например, https://en.wikipedia.org/wiki/Dilution (neural networks)) и слой деактивации нейронов Dropout 413.
[0075] После полносвязных каскадов настроен выходной слой 410, который представлен в виде вектора. Данные нейроны отвечают за изменение управляющего действия системы ОВиК, т.е. выходной слой нейронной сети - это количество всевозможных действий, которые мы можем применить к системе ОВиК. Количество нейронов на выходном слое определяет какой набор параметров управляемой системы будет изменен. Так за изменение одного параметра может отвечать один нейрон, значение веса которого будет использовано для изменения этого параметра, так и несколько нейронов, каждое значение веса которых пропорционально вероятности выбора одного из заранее определенных дискретных значений изменения данного параметра.
[0076] После обучения НС 402 ЦЗММО, сформированные на выходе указанной НС 402 подаются на вход НС 403 в виде сгенерированной матрицы предиктивных управляющих действий 415, которая необходима для обучения НС 403. Обучение 416 НС 403 осуществляется известными из уровня техники методами, которые были описаны выше. Результатом обучения 416 является итоговое спрогнозированное управляющее действие для системы ОВиК 417, которое транслируется в указанную систему и изменяет соответствующие параметры.
[0077] Далее рассмотрим пример реализации устройства 200 показанного на фиг. 2.
[0078] Устройство 200 адаптивного автоматизированного управления системой отопления, вентиляции и кондиционирования может быть расположено в составе системе ОВиК и/или быть связано канало передачи данных с указанной системой.
[0079] На фиг. 2, показан процесс взаимодействия устройства 200 с внешними системами, а также элементы указанного устройства 200. Специалисту в данной области техники будет очевидно, что устройство 200 также может быть интегрировано в контроллер системы ОВиК в качестве отдельного программно-аппаратного блока.
[0080] В одном частном варианте реализации устройство 200 содержит блок управления 210, включающий буфер памяти 220, блок обработки данных 230, БММО 1 240 и БММО 2 250. Кроме того, в одном частном варианте осуществления, устройство 200 и его элементы, такие как блок управления 210, буфер памяти 220, блок обработки данных 230, БММО 1 240, БММО 2 250, могут быть реализованы на базе устройства 600, которое более подробно раскрыто на Фиг. 6.
[0081] Рассмотрим сценарий взаимодействия устройства 200.
[0082] Параметры микроклимата, полученные, например, с датчиков, таких как датчики 260, поступают в буфер памяти. В одном частном варианте осуществления, в буфер памяти могут поступать как параметры микроклимата, так и дополнительные внешние параметры, влияющие на микроклимат. Указанные внешние параметры могут собираться соответствующими датчиками, известными из уровня техники. Процесс получения данных может осуществляться, например, с помощью канала передачи данных, сформированным между датчиками 260 и устройством 200. Указанные параметры обрабатываются устройством 200 в соответствии с этапами способа 100, изложенного выше.
[0083] На Фиг. 3 показан другой пример реализации устройства 200.
[0084] Рассмотрим более подробно процесс осуществления способа 100 в указанном частном варианте реализации.
[0085] В одном частном варианте реализации устройство 200 содержит блок управления 210, включающий буфер памяти 220, блок обработки данных 230, БММО 1 340 и БММО 2 350. Кроме того, в одном частном варианте осуществления, устройство 200 и его элементы, такие как блок управления 210, буфер памяти 220, блок обработки данных 230, БММО 1 340, БММО 2 350, могут быть реализованы на базе устройства 600, которое более подробно раскрыто на Фиг.6.
[0086] Рассмотрим сценарий взаимодействия устройства 200.
[0087] Параметры микроклимата, полученные, например, с датчиков, таких как датчики 260, поступают в буфер памяти. В одном частном варианте осуществления, в буфер памяти могут поступать как параметры микроклимата, так и дополнительные внешние параметры, влияющие на микроклимат. Указанные внешние параметры могут собираться соответствующими датчиками, известными из уровня техники. Процесс получения данных может осуществляться, например, с помощью канала передачи данных, сформированным между датчиками 260 и устройством 200. Указанные параметры обрабатываются устройством 200 в соответствии с этапами способа 100, изложенного выше.
[0088] Так, в указанном варианте реализации ЦЗММО формируются с помощью ПНС 1, которая принимает на вход выборки данных, полученные на этапе 130 и вспомогательный набор входных данных, который получен с помощью УНС 1, которая принимает на вход выборки данных, полученные на этапе 130. Соответственно, обучение УНС 2 выполняется на выборках данных, полученных на этапе 130 и выходных данных ПНС 2. В свою очередь, ПНС 2 обучается на выборках данных, полученных на этапе 130, и ЦЗММО, полученных с помощью ПНС 1.
[0089] На фиг. 5 показан пример взаимодействия устройства 200 с системой ОВиК центра обработки данных (ЦОД). Указанный ЦОД может содержать несколько логических зон в которых может потребоваться управление параметрами микроклимата.
[0090] Устройство адаптивного автоматизированного управления 200 работает следующим образом. Так, каждый заданный промежуток времени, например, каждые 60 минут и т.д., данные о состояниях каждой зоны, содержащие по меньшей мере параметры микроклимата, такие как температура, влажность и т.д., собираются с датчиков зон помещения 260. Кроме того, как упоминалось выше, устройство 200 выполнено с возможностью сбора внешних параметров, влияющих на микроклимат в каждой из заданных зон, которые собираются с внешних датчиков 262. Указанные внешние параметры необходимы для осуществления возможности получения управляющего действия не только на основе параметров микроклимата в заданной зоне, но и также на основе параметров, влияющих на микроклимат извне. Так, при управлении различными зонами микроклимата на одном или более объектах, указанные зоны могут располагаться в непосредственном контакте, что может приводить к теплообмену (переносу энергии) между ними. При этом, отсутствие учета такого внешнего воздействия при настройке системы ОВиК может привести к тому, что указанная система ОВиК не достигнет параметров уставки, что, в свою очередь, приведет к повышению энергопотребления и общему снижению эффективности управления параметрами микроклимата в заданной зоне.
[0091] Возвращаясь к варианту реализации, показанному на фиг.5, данные о состоянии каждой зоны, в этом конкретном примере реализации, собираются системой мониторинга и управления инженерной инфраструктурой 503, которая расположена в ЦОД. Однако специалисту в данной области техники очевидно, что указанные датчики 260 и 262 также могут быть соединены непосредственно с устройством 200. Для реализации заявленного способа автоматизированного управления системой ОВиК 100, устройство 200 инициирует запрос в систему мониторинга и управления 503 для получения данных (параметры микроклимата и внешние параметры) о заданном периоде времени. Как указывалось выше, устройство 200 может получать данные с датчиков напрямую, если, например в помещении нет систем мониторинга. После того, как данные получены, например, занесены в память устройства 200, указанные данные векторизуются и нормализуются (этап 120). Далее, из преобразованных данных формируется множество выборок данных (этап 130). Указанные сформированные выборки данных используются для получения ЦЗММО и обучения БММО 2 (этапы 140, 150 и 160). После обучения БММО 2, устройство 200 обрабатывает текущие данные, получаемые отдатчиков 260 и 262 для формирования спрогнозированного значения управляющего действия системы ОВиК (этап 170). Указанное действие является действием для контроллера системы управления климатической системой 502, которое необходимо совершить системе 501 для нормализации и/или достижения в заданной зоне необходимых параметров микроклимата. В результате реализации способа 100 устройством 200 формируется управляющий сигнал, который передается на контроллер управления климатической системы 502. Указанный контроллер управления 502 исполняет сигнал меняя параметры (температурная уставка, скорость вращения вентиляторов, значения коэффициентов ПИД-регулятора и т.д.) системы ОВиК 501. Затем через заданный промежуток времени данный процесс повторяется.
[0092] Для специалиста в данной области техники будет очевидно, что описанный выше пример реализации никак не должен ограничивать настоящее решение. Так, указанный пример предназначен для раскрытия возможности централизованного управления системами ОВиК различных зон микроклимата на одном или более объектах, что позволяет эффективно управлять микроклиматом каждой зоны, учитывая перенос энергии из иных прилегающих зон, например, через бетонную стену, и эффективно управлять распределением температур на заданных объектах, что особенно актуально для крупных объектов с сложным устройством климата: небоскребов, обладающих эффектом «дымохода», крупных промышленных объектов, например, металлургических заводов, а также для одновременного управления микроклиматом в квартирах зданий микрорайона/города.
[0093] Таким образом, описанное в настоящей заявке техническое решение обеспечивает эффективное управление системой ОВиК, а также обеспечивает снижение потребляемой системой ОВиК энергии при управлении параметрами микроклимата и повышает точность управления поддерживаемыми параметрами микроклимата системы ОВиК.
[0094] На Фиг.6 представлен пример общего вида вычислительной устройства 600 на базе которого в одном частном варианте может быть реализовано устройство 200, которое обеспечивает реализацию заявленного способа или является частью компьютерной системы, например, сервером, персональным компьютером, частью вычислительного кластера, обрабатывающим необходимые данные для осуществления заявленного технического решения.
[0095] В общем случае устройство 200 содержит такие компоненты, как: один или более процессоров 601, по меньшей мере одну память 602, средство хранения данных 603, интерфейсы ввода/вывода 604, средство В/В 605, средство сетевого взаимодействия 606, которые объединяются посредством универсальной шины.
[0096] Процессор 601 выполняет основные вычислительные операции, необходимые для обработки данных при выполнении способа 100. Процессор 601 исполняет необходимые машиночитаемые команды, содержащиеся в оперативной памяти 602.
[0097] Память 602, как правило, выполнена в виде ОЗУ и содержит необходимую программную логику, обеспечивающую требуемый функционал.
[0098] Средство хранения данных 603 может выполняться в виде HDD, SSD дисков, рейд массива, флэш-памяти, оптических накопителей информации (CD, DVD, MD, Blue-Ray дисков) и т.п. Средства 603 позволяют выполнять долгосрочное хранение различного вида информации, например полученные параметры микроклимата, выборки данных и т.п.
[0099] Для организации работы компонентов устройства 200 и организации работы внешних подключаемых устройств применяются различные виды интерфейсов В/В 604. Выбор соответствующих интерфейсов зависит от конкретного исполнения вычислительного устройства, которые могут представлять собой, не ограничиваясь: PCI, AGP, PS/2, IrDa, FireWire, LPT, COM, SATA, IDE, Lightning, USB (2.0, 3.0, 3.1, micro, mini, type C), TRS/Audio jack (2.5, 3.5, 6.35), HDMI, DVI, VGA, Display Port, RJ45, RS232 и т.п.
[0100] Выбор интерфейсов 604 зависит от конкретного исполнения устройства 200, которое может быть реализовано на базе широко класса устройств, например, персональный компьютер, мейнфрейм, ноутбук, серверный кластер, тонкий клиент, смартфон, сервер и т.п.
[0101] В качестве средств В/В данных 605 может использоваться: клавиатура, джойстик, дисплей (сенсорный дисплей), монитор, сенсорный дисплей, тачпад, манипулятор мышь, световое перо, стилус, сенсорная панель, трекбол, динамики, микрофон, средства дополненной реальности, оптические сенсоры, планшет, световые индикаторы, проектор, камера, средства биометрической идентификации (сканер сетчатки глаза, сканер отпечатков пальцев, модуль распознавания голоса) и т.п.
[0102] Средства сетевого взаимодействия 606 выбираются из устройств, обеспечивающий сетевой прием и передачу данных, например, Ethernet карту, WLAN/Wi-Fi модуль, Bluetooth модуль, BLE модуль, NFC модуль, IrDa, RFID модуль, GSM модем и т.п.С помощью средств 606 обеспечивается организация обмена данными между, например, устройством 200, представленным в виде сервера и датчиками по проводному или беспроводному каналу передачи данных, например, WAN, PAN, ЛВС (LAN), Интранет, Интернет, WLAN, WMAN или GSM.
[0103] Конкретный выбор элементов устройства 200 для реализации различных программно-аппаратных архитектурных решений может варьироваться с сохранением обеспечиваемого требуемого функционала.
[0104] Представленные материалы заявки раскрывают предпочтительные примеры реализации технического решения и не должны трактоваться как ограничивающие иные, частные примеры его воплощения, не выходящие за пределы испрашиваемой правовой охраны, которые являются очевидными для специалистов соответствующей области техники. Таким образом, объем настоящего технического решения ограничен только объемом прилагаемой формулы.
ИСТОЧНИКИ ИНФОРМАЦИИ:
1. Акивис Μ.Α., Гольдберг В.В.Тензорное исчисление. - М.: Наука, 1969
2. Mnih, V., Kavukcuoglu, K., Silver, D. et al. Human-level control through deep reinforcement learning. Nature 518, 529-533 (2015). https://doi.org/10.1038/nature 14236
3. T. Wei, Yanzhi Wang and Q. Zhu, "Deep reinforcement learning for building HVAC control," 2017 54th ACM/EDAC/IEEE Design Automation Conference (DAC), 2017, pp. 1-6, doi: 10.1145/3061639.3062224.
4. Sutton, Richard S. and Barto, Andrew G.. Reinforcement Learning: An Introduction. Second: The MIT Press, 2018.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система и способ выявления аномалий в киберфизической системе | 2022 |
|
RU2800740C1 |
| Система и способ для выявления структуры паттернов и аномалий в потоке событий, поступающих от киберфизической системы или информационной системы | 2022 |
|
RU2793549C1 |
| Способ диагностики и мониторинга аномалий в кибер-физической системе | 2021 |
|
RU2784981C1 |
| Способ детектирования и дисперсионного анализа частиц в текучей среде с применением метода искусственного интеллекта | 2024 |
|
RU2833482C1 |
| ВЕКТОРНОЕ ВЫЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО | 2024 |
|
RU2830044C1 |
| СПОСОБ И СИСТЕМА МАШИННОГО ОБУЧЕНИЯ ИЕРАРХИЧЕСКИ ОРГАНИЗОВАННОМУ ЦЕЛЕНАПРАВЛЕННОМУ ПОВЕДЕНИЮ | 2019 |
|
RU2755935C2 |
| Система управления энергопотреблением | 2022 |
|
RU2821067C2 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ АКТИВНОСТИ УЧЕТНЫХ ЗАПИСЕЙ В ВЫЧИСЛИТЕЛЬНОЙ СРЕДЕ | 2023 |
|
RU2824919C1 |
| Способ определения аномалии в киберфизической системе | 2022 |
|
RU2790331C1 |
| Способ выявления нормальных реакций узлов компьютерной сети на сетевые пакеты, относящиеся к неизвестному трафику | 2022 |
|
RU2802164C1 |
Техническое решение относится к области систем отопления, вентиляции и кондиционирования (ОВиК), а точнее к способу адаптивного автоматизированного управления микроклиматом в системах отопления, вентиляции и кондиционирования. Cпособ выполняется с помощью блока управления и содержит этапы, на которых получают данные микроклимата в заданной зоне и сохраняют полученные данные в буфер памяти блока управления, выполняют векторизацию и нормализацию данных; формируют выборки данных одного размера; формируют целевые значения модели машинного обучения (ЦЗММО), определяющие выбор управляющих действий для по меньшей мере одного контроллера системы ОВиК, с помощью по меньшей мере одного первого блока модели машинного обучения (БММО 1), содержащего по меньшей мере одну нейронную сеть (НС), при этом БММО 1 принимает на вход выборки данных; выполняют обучение по меньшей мере одного второго блока модели машинного обучения (БММО 2), содержащего по меньшей мере одну НС, на выборках данных, и ЦЗММО, полученных с выхода по меньшей мере одного БММО 1; копируют веса синапсов НС БММО 2 в НС БММО 1; осуществляют обработку текущих данных микроклимата, расположенных в буфере памяти блока управления, с помощью по меньшей мере одного БММО 2, в результате которой получают по меньшей мере одно спрогнозированное значение управляющего действия системы ОВиК; передают спрогнозированное управляющее действие в систему ОВиК и изменяют по меньшей мере один параметр работы системы ОВиК в заданной зоне. Технический результат - снижение потребляемой системой ОВиК энергии при управлении параметрами микроклимата. 2 н. и 10 з.п. ф-лы, 6 ил.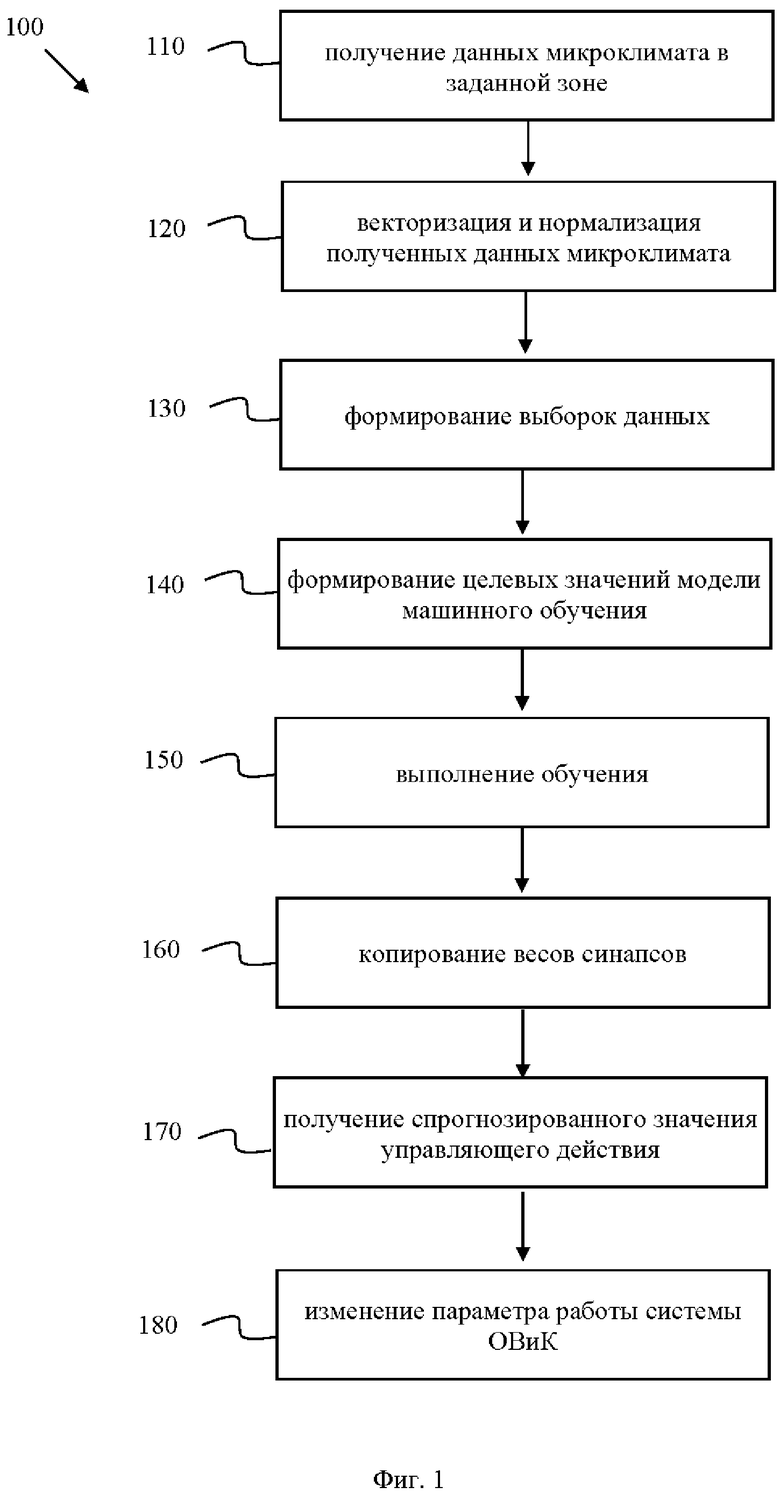
1. Способ адаптивного автоматизированного управления системой отопления, вентиляции и кондиционирования (ОВиК), содержащей по меньшей мере один контроллер, при этом способ выполняется с помощью блока управления и содержит этапы, на которых:
a) получают данные о состоянии заданной зоны, содержащие по меньшей мере данные микроклимата в заданной зоне, и сохраняют полученные данные в буфер памяти блока управления;
b) выполняют векторизацию и нормализацию данных, полученных на этапе а) за заданный временной период, и сохраняют их в буфер памяти блока управления;
c) формируют выборки данных одного размера на основании данных, собранных на этапе b), взятых в случайные моменты времени работы системы ОВиК;
d) формируют целевые значения модели машинного обучения (ЦЗММО), определяющие выбор управляющих действий для по меньшей мере одного контроллера системы ОВиК, с помощью по меньшей мере одного первого блока модели машинного обучения (БММО 1), содержащего по меньшей мере одну нейронную сеть (НС), при этом БММО 1 принимает на вход выборки данных, полученные на этапе с);
e) выполняют обучение по меньшей мере одного второго блока модели машинного обучения (БММО 2), содержащего по меньшей мере одну НС, на выборках данных, полученных на этапе с), и ЦЗММО, полученных с выхода по меньшей мере одного БММО 1 на этапе d);
f) копируют веса синапсов НС БММО 2 в НС БММО 1;
g) осуществляют обработку текущих данных микроклимата, расположенных в буфере памяти блока управления, с помощью по меньшей мере одного БММО 2, в результате которой получают по меньшей мере одно спрогнозированное значение управляющего действия системы ОВиК;
h) передают спрогнозированное управляющее действие в контроллер системы ОВиК и изменяют по меньшей мере один параметр работы системы ОВиК в заданной зоне.
2. Способ по п. 1, характеризующийся тем, что данные микроклимата на этапе a) получают от по меньшей мере одного внешнего датчика, расположенного в заданной зоне и подключенного к блоку управления.
3. Способ по п. 1, характеризующийся тем, что данные микроклимата на этапе а) получают из хранилища данных, выполненного в виде базы данных, или памяти системы ОВиК, или памяти блока управления, или носителя данных.
4. Способ по п. 1, характеризующийся тем, что данные микроклимата на этапе а) дополнительно записывают в постоянную память блока управления.
5. Способ по п. 1, характеризующийся тем, что данные микроклимата на этапе а) включают в себя параметры изменения климата, включающие в себя по меньшей мере одно из: данные о температуре в заданной зоне, данные о влажности воздуха в заданной зоне, данные о внешней температуре, данные о солнечной активности, данные об очереди сетевого балансировщика нагрузки, данные о используемой пиковой или интегральной мощности потребляемой электроэнергии или их сочетания.
6. Способ по п. 1, характеризующийся тем, что каждая из нейронной сети (НС) БММО 1 и БММО2 содержит управляющую нейронную сеть (УНС 1, УНС 2) и премирующую нейронную сеть (ПНС 1, ПНС 2).
7. Способ по п. 6, характеризующийся тем, что ЦЗММО формируют с помощью ПНС 1, обученной на выборках данных, полученных на этапе с) и вспомогательного набора входных данных, полученного с помощью УНС 1.
8. Способ по п. 7, характеризующийся тем, что вспомогательный набор входных данных формируют с помощью УНС 1 на выборках данных, полученных на этапе с).
9. Способ по п. 6, характеризующийся тем, что обучение УНС 2 выполняют на выборках данных, полученных на этапе с) и обученной ПНС 2.
10 Способ по п. 9, характеризующийся тем, что обучение ПНС 2 выполняют на выборках данных, полученных на этапе с), и ЦЗММО, полученных с помощью ПНС 1.
11. Способ по п. 7, характеризующийся тем, что на этапе g) обработку текущих данных микроклимата, расположенных в буфере памяти блока управления, осуществляют с помощью по меньшей мере одной УНС 2.
12. Устройство адаптивного автоматизированного управления системой отопления, вентиляции и кондиционирования, содержащее
по меньшей мере один процессор, или программируемую логическую интегральную схему (ПЛИС), или интегральную схему специального назначения (ИССН); и
по меньшей мере один модуль памяти, соединенный с процессором, или ПЛИС, или ИССН, который содержит машиночитаемые инструкции, которые при их выполнении процессором ПЛИС или ИССН обеспечивают выполнение способа по любому из пп. 1-11.
| US 20140025613 A1, 23.01.2014 | |||
| US 9146546 B2, 29.09.2015 | |||
| US 8990133 B1, 24.03.2015 | |||
| СИСТЕМА HVAC С ОСНОВАННЫМ НА ВРЕМЕНИ ПОЕЗДКИ УПРАВЛЕНИЕМ | 2015 |
|
RU2692155C2 |
| RU 2015141427 A, 04.04.2017 | |||
| УСТРОЙСТВО для ПОДАЧИ ЛАКОКРАСОЧНЫХ МАТЕРИАЛОВ^!^!, | 0 |
|
SU169425A1 |

