Область изобретения
Настоящее изобретение, в частности, относится к способу и системе для защиты работы поезда (поездного состава) в загрязняющей атмосферной (воздушной) среде.
Предпосылки создания изобретения
В последние годы в Китае быстро развиваются высокоскоростные поезда. Перевозка с помощью высокоскоростных поездов представляет собой один из ресурсно-ориентированных и благоприятных для окружающей среды видов перевозок. Ускорение развития высокоскоростных поездов сегодня стало единой позицией во всех слоях общества. Высокоскоростные поезда становятся главным путем национального экономического развития Китая за счет характеристик безопасности, экономичности, удобства и т.п. Эти характеристики определяют их преобразование в массовые перевозки и позволяют им стать основой всеобъемлющей транспортной системы Китая.
Однако с расширением рабочих сетей высокоскоростных поездов и увеличением эксплуатационного годового пробега также возникают некоторые проблемы. Среди них загрязняющая воздух среда является особенно вредной для открытых воздействию важнейших компонентов высокоскоростных поездов. Когда содержание SO2, NO2 или подобного в рабочей среде поезда является слишком высоким, проблемы выкрашивания/точечной коррозии и коррозии открытых воздействию важнейших компонентов, таких как компоненты пантографа (токосъемника), контактные сети и вагоны могут усугубляться, в силу этого сокращая сроки службы открытых воздействию важнейших компонентов и приводя к экономическим потерям.
Сущность изобретения
Цель настоящего изобретения заключается в предоставлении способа и системы для защиты работы поездного состава в загрязняющей воздушной среде, которые оценивают ситуацию открытости воздействию важнейших компонентов поезда в загрязняющей воздушной среде и принимают соответствующие защитные меры, обеспечивая нормальные сроки службы важнейших компонентов поезда.
Чтобы решать вышеуказанные технические проблемы, техническое решение, принятое настоящим изобретением, представляет собой:
Способ защиты работы поездного состава в загрязняющей воздушной среде, отличающийся включением в себя следующих этапов:
этап 1, осуществление сбора нескольких групп данных регистрации качества воздуха на крыше и данных регистрации качества воздуха под вагоном и вычисление средней концентрации каждого загрязняющего вещества на крыше и под вагоном поезда в течение времени работы со времени отбытия от станции отправления до текущего времени;
этап 2, расчет (решение) показателя Q0 всесторонней оценки качества воздуха на крыше путем использования данных регистрации качества воздуха на крыше по этапу 1 и расчет показателя Q1 всесторонней оценки качества воздуха под вагоном путем использования данных регистрации качества воздуха под вагоном на этапе 1;
этап 3, вычисление времени T0 воздействия на компоненты крыши при условии Q0≥Q и вычисление времени T1 воздействия на подвагонные компоненты при условии Q1≥Q; при этом Q является заданным безопасным значением показателя всесторонней оценки качества воздуха;
этап 4, обучение модели вычисления состояния загрязнения около компонента крыши согласно следующему способу:
моделирование работы поезда путем использования вычисленной на этапе 1 средней концентрации каждого загрязняющего вещества на крыше поезда в течение времени работы со времени отбытия от станции отправления до текущего времени и соответствующего T0, рассчитанного на этапе 3, в качестве экспериментальных условий моделирования для получения уровня G0 загрязнения компонентов крыши при различных экспериментальных условиях моделирования, при этом степень загрязнения компонентов крыши классифицируется в качестве G-уровней; и
обучение модели вычисления состояния загрязнения около компонента крыши путем использования вычисленной на этапе 1 средней концентрации каждого загрязняющего вещества на крыше поезда в течение времени работы со времени отбытия от станции отправления до текущего времени и соответствующего T0, рассчитанного на этапе 3, в качестве ввода и использование G0 в качестве вывода с получением обученной модели вычисления состояния загрязнения около компонента крыши;
обучение модели вычисления состояния загрязнения около подвагонного компонента согласно следующему способу:
моделирование работы поезда путем использования вычисленной на этапе 1 средней концентрации каждого загрязняющего вещества в подвагонной части поезда в течение времени работы со времени отбытия от станции отправления до текущего времени и соответствующего T1, рассчитанного на этапе 3, в качестве экспериментальных условий моделирования для получения уровня G1 загрязнения подвагонных компонентов при различных экспериментальных условиях моделирования, при этом степень загрязнения подвагонных компонентов классифицируется в качестве G-уровней; и
обучение модели вычисления состояния загрязнения около подвагонного компонента путем использования вычисленной на этапе 1 средней концентрации каждого загрязняющего вещества в подвагонной части поезда в течение времени работы со времени отбытия от станции отправления до текущего времени и соответствующего T1, рассчитанного на этапе 3, в качестве ввода и использования G1 в качестве вывода с получением обученной модели вычисления состояния загрязнения около подвагонного компонента;
этап 5, осуществление сбора, после остановки поезда, данных регистрации качества воздуха на крыше и данных регистрации качества воздуха под вагоном;
этап 6,
путем использования данных регистрации качества воздуха на крыше, собранных по этапу 5, рассчитывают среднюю концентрацию каждого загрязняющего вещества на крыше поезда в течение времени работы со времени отбытия от станции отправления до текущего времени, показателя Q0 всесторонней оценки качества воздуха на крыше и времени T0 воздействия на компоненты крыши при условии Q0≥Q; и привлечение обученной модели вычисления состояния загрязнения около компонента крыши при условии Q0≥Q для расчета уровня загрязнения компонентов крыши; и
путем использования данных регистрации качества воздуха под вагоном, собранных по этапу 5, рассчитывают среднюю концентрацию каждого загрязняющего вещества в подвагонной части поезда в течение времени работы со времени отбытия от станции отправления до текущего времени показателя Q1 всесторонней оценки качества воздуха под вагоном и времени T1 воздействия на подвагонные компоненты при условии Q1≥Q; и привлечение обученной модели вычисления состояния загрязнения около подвагонного компонента при условии Q1≥Q для расчета уровня загрязнения подвагонных компонентов.
этап 7,
выполнение соответствующей очистки компонентов крыши согласно рассчитанному на этапе 6 уровню загрязнения компонентов крыши; и
выполнение соответствующей очистки подвагонных компонентов согласно рассчитанному на этапе 6 уровню загрязнения подвагонных компонентов.
В качестве предпочтительного режима данные регистрации качества воздуха на крыше и данные регистрации качества воздуха под вагоном включают в себя одно или более из концентрации CO2, концентрации NO2, концентрации SO2, концентрации PM2,5 (твердых частиц размером не более 2,5 мкм), концентрации VOC (летучих органических соединений) и концентрации пыли.
В качестве предпочтительного режима данные регистрации качества воздуха на крыше и/или данные регистрации качества воздуха под вагоном получают из нескольких мест контроля.
В качестве предпочтительного режима,
способ вычисления показателя Q0 всесторонней оценки качества воздуха на крыше представляет собой:
Q0 = концентрация CO2 на крыше × p1 + концентрация NO2 на крыше × p2 + концентрация SO2 на крыше × p3 + концентрация PM2,5 × p4 на крыше + концентрация VOC на крыше × p5 + концентрация пыли на крыше × p6;
способ вычисления показателя Q1 всесторонней оценки качества воздуха под вагоном представляет собой:
Q1 = концентрация CO2 под вагоном × p1 + концентрация NO2 под вагоном × p2 + концентрация SO2 под вагоном × p3 + концентрация PM2,5 под вагоном × p4 + концентрация VOC под вагоном × p5 + концентрация пыли под вагоном × p6;
при этом p1, p2, p3, p4, p5 и p6 являются соответствующими весовыми коэффициентами (атомными массами) загрязняющих веществ.
В качестве предпочтительного режима на этапе 4 модель вычисления состояния загрязнения около компонента крыши обучается с помощью алгоритма решения сетевых задач на основе глубоких LSTM-сетей (рекуррентных нейронных сетей с долгой краткосрочной памятью), при этом весовой коэффициент и пороговое значение глубокой LSTM-сети получают путем оптимизации с использованием роя квантовых частиц с адаптивными весовыми коэффициентами, включающей в себя:
этап A1: использование вектора положения каждой отдельной квантовой частицы в роях квантовых частиц в качестве весового коэффициента и порогового значения глубокой LSTM-сети и инициализацию (задание начального значения) параметра вектора положения отдельной частицы роя квантовых частиц на случайное число в диапазоне [-1, 1];
при этом число роев квантовых частиц составляет в диапазоне [30, 100], число частиц в рое квантовых частиц составляет в диапазоне [4, 60], максимальное число итераций составляет в диапазоне [300, 1200], число итераций для формирования элитного роя составляет в диапазоне [50, 200], пороговое значение определения преждевременной сходимости составляет в диапазоне [0,02, 0,5], и наихудший коэффициент δ% варьирования частиц между роями составляет в диапазоне [1%, 6%];
этап A2: задание функции пригодности и определение вектора положения начальной оптимальной отдельной квантовой частицы и числа t итераций, t=1;
подстановку весового коэффициента и порогового значения, соответствующих вектору положения отдельной квантовой частицы, в модель вычисления состояния загрязнения около компонента крыши на основе глубокой LSTM-сети, определение типа идентификационной векторной метки путем использования модели вычисления состояния загрязнения около компонента крыши на основе глубокой LSTM-сети, определенной по вектору положения отдельной квантовой частицы, и использование обратной величины среднеквадратической ошибки выходной векторной метки и фактической векторной метки в качестве второй функции пригодности;
этап A3: вычисление дисперсии пригодности колонии каждого роя квантовых частиц и выполнение определения преждевременной сходимости;
если дисперсия пригодности колонии роя квантовых частиц меньше порогового значения γ определения преждевременной сходимости, видоизменение δ% частиц с наихудшей пригодностью и частицы с экстремальным значением колонии в рое квантовых частиц и использование частицы с наилучшей пригодностью в данный момент в качестве глобальной оптимальной отдельной квантовой частицы;
этап A4: определение того, следует ли формировать элитный рой;
когда число итераций превышает число итераций элитного роя, извлечение экстремальных значений различных роев посредством совместного использования информации между роями для формирования элитного роя и переход к этапу A8, в противном случае - выполнение этапа A5;
этап A5: обновление параметров частиц различных роев;
этап A6: для каждой частицы повторное вычисление значения пригодности частицы и сравнение значения пригодности частицы с текущим отдельным экстремальным значением частицы, если значение пригодности частицы превосходит текущее отдельное экстремальное значение частицы, обновление отдельного экстремального значения частицы; сравнение текущего экстремального значения колонии частицы с глобальным экстремальным значением со значением пригодности каждой частицы, если значение пригодности частицы превосходит текущее экстремальное значение колонии, обновление частицы с глобальным экстремальным значением, допущение t=t+1 и выполнение этапа A3;
этап A7: продолжение развертывания элитного роя;
этап A8: определение того, удовлетворяется ли максимальное число итераций, и, если максимальное число итераций удовлетворяется, выход из процесса, в противном случае - допущение t=t+1 и выполнение этапа A3 до тех пор, пока не будет найдено глобальное оптимальное значение; и вывод (выдачу) весового коэффициента и порогового значения глубокой LSTM-сети.
В качестве предпочтительного режима, на этапе 4 модель вычисления состояния загрязнения около подвагонного компонента обучается с помощью алгоритма на основе глубоких GRU-сетей (на основе управляемого рекуррентного блока), при этом весовой коэффициент и пороговое значение глубокой GRU-сети получают путем оптимизации с использованием алгоритма хаотического поведения летучих мышей, включающего в себя:
этап B1: использование положения отдельной летучей мыши (в качестве элемента) в качестве весового коэффициента и порогового значения модели вычисления состояния загрязнения около подвагонного компонента на основе глубокой GRU-сети, инициализацию роев летучих мышей и задание параметров роев летучих мышей; при этом размер роя летучих мышей составляет в диапазоне [300, 600], максимальная частота r0 импульсов отдельной летучей мыши составляет в диапазоне [0,3, 0,6], максимальная интенсивность A0 импульсного звука составляет в диапазоне [0,3, 0,6], максимальное число итераций составляет в диапазоне [200, 500], точность поиска составляет в диапазоне [0,002, 0,2], частота импульсов составляет в диапазоне [0, 1,8], увеличенный коэффициент частоты поиска летучих мышей составляет в диапазоне [0,04, 0,1], коэффициент ослабления интенсивности звука составляет в диапазоне [0,75, 0,1], максимальное число итераций составляет в диапазоне [200, 800], и максимальная точность поиска составляет в диапазоне [0,02, 0,15];
этап B2: задание функции пригодности и определение положения начальной оптимальной отдельной летучей мыши и числа t итераций, t=1;
подстановку весового коэффициента и порогового значения, соответствующих положения отдельной летучей мыши, в модель вычисления состояния загрязнения около подвагонного компонента на основе глубокой GRU-сети и получение результата регистрации путем использования модели вычисления состояния загрязнения около подвагонного компонента на основе глубокой GRU-сети, определенной по положению отдельной летучей мыши, и конструирование первой функции f1(E) пригодности по разности E между результатом регистрации и фактической ситуацией, f1(E)=1/(E+1);
вычисление пригодности положения каждой отдельной летучей мыши путем использования первой функции пригодности и использование положения отдельной летучей мыши, соответствующего максимальной пригодности, в качестве положения начальной оптимальной отдельной летучей мыши;
этап B3: обновление скорости и положения отдельной летучей мыши путем использования заданной частоты импульсов;
этап B4: если Rand1>ri, случайное возмущение летучей мыши в оптимальном положении отдельной летучей мыши с формированием возмущенного положения отдельной летучей мыши;
при этом Rand1 является случайным числом, равномерно распределенным на [0, 1], и ri является частотой импульсов i-ой летучей мыши;
этап B5: если Rand2>Ai, а пригодность возмущенного положения отдельной летучей мыши превосходит пригодность положения отдельной летучей мыши перед возмущением, перемещение отдельной летучей мыши в возмущенное положение, либо, в противном случае, поддержание отдельной летучей мыши в первоначальном положении;
при этом Rand2 является случайным числом, равномерно распределенным на [0, 1], и Ai является интенсивностью звука i-ой летучей мыши;
этап B6: если условие этапа B5 удовлетворяется, обновление частоты импульсов и интенсивности импульсного звука отдельной летучей мыши путем использования увеличенного коэффициента частоты поиска летучих мышей и коэффициента ослабления интенсивности звука и переход к этапу B4, либо в противном случае, переход к этапу B7;
этап B7: вычисление пригодности положения каждой отдельной летучей мыши в текущем рое летучих мышей и выполнение хаотической оптимизации положения и скорости для первых (верхних) m% отдельных летучих мышей в порядке убывания с получением обновленных первых m% отдельных летучих мышей, при этом m составляет в диапазоне [4, 25]; и
этап B8: определение того, достигается ли максимальное число итераций или максимальная точность поиска; если оно(а) достигается, выбор глобальной оптимальной отдельной летучей мыши из обновленных первых m% отдельных летучих мышей согласно значению пригодности и вывод оптимального весового коэффициента и порогового значения модели вычисления состояния загрязнения около подвагонного компонента на основе глубокой GRU-сети, соответствующих глобальной оптимальной отдельной летучей мыши; в противном случае - допущение t=t+1, и переход к этапу B3 для продолжения следующей итерации.
На основе одной и той же идеи изобретения, настоящее изобретение дополнительно предоставляет систему для защиты работы поезда в загрязняющей воздушной среде, отличающуюся тем, что она включает в себя:
модуль регистрации качества воздуха на крыше, выполненный с возможностью получать данные регистрации качества воздуха на крыше;
модуль регистрации качества воздуха под вагоном, выполненный с возможностью получать данные регистрации качества воздуха под вагоном;
модуль передачи данных, выполненный с возможностью передавать полученные данные регистрации качества воздуха на крыше и данные регистрации качества воздуха под вагоном в модуль обработки данных;
модуль обработки данных, выполненный с возможностью моделирования и вычисления уровней загрязнения; при этом:
процесс моделирования включает в себя:
расчет показателя Q0 всесторонней оценки качества воздуха на крыше путем использования данных регистрации качества воздуха на крыше и расчет показателя Q1 всесторонней оценки качества воздуха под вагоном путем использования данных регистрации качества воздуха под вагоном;
вычисление времени T0 воздействия на компоненты крыши при условии Q0≥Q и вычисление времени T1 воздействия на подвагонные компоненты при условии Q1≥Q; при этом Q является заданным безопасным значением (значением безопасности) показателя всесторонней оценки качества воздуха;
обучение модели вычисления состояния загрязнения около компонента крыши согласно следующему процессу:
моделирование работы поезда путем использования вычисленной средней концентрации каждого загрязняющего вещества на крыше поезда в течение времени работы со времени отбытия от станции отправления до текущего времени и соответствующего рассчитанного T0 в качестве экспериментальных условий моделирования для получения уровня G0 загрязнения компонентов крыши при различных экспериментальных условиях моделирования, при этом степень загрязнения компонентов крыши классифицируется в качестве G-уровней; и
обучение модели вычисления состояния загрязнения около компонента крыши путем использования вычисленной средней концентрации каждого загрязняющего вещества на крыше поезда в течение времени работы со времени отбытия от станции отправления до текущего времени и соответствующего рассчитанного T0 в качестве ввода и использование G0 в качестве вывода с получением обученной модели вычисления состояния загрязнения около компонента крыши;
обучение модели вычисления состояния загрязнения около подвагонного компонента согласно следующему процессу:
моделирование работы поезда путем использования вычисленной средней концентрации каждого загрязняющего вещества в подвагонной части в течение времени работы со времени отбытия от станции отправления до текущего времени и соответствующего рассчитанного T1 в качестве экспериментальных условий моделирования для получения уровня G1 загрязнения подвагонных компонентов при различных экспериментальных условиях моделирования, при этом степень загрязнения подвагонных компонентов классифицируется в качестве G-уровней; и
обучение модели вычисления состояния загрязнения около подвагонного компонента путем использования вычисленной средней концентрации каждого загрязняющего вещества в подвагонной части поезда в течение времени работы со времени отбытия от станции отправления до текущего времени и соответствующего рассчитанного T1 в качестве ввода и использование G1 в качестве вывода для получения обученной модели вычисления состояния загрязнения около подвагонного компонента;
процесс вычисления уровней загрязнения включает в себя:
получение, после остановки поезда, данных регистрации качества воздуха на крыше и данных регистрации качества воздуха под вагоном;
путем использования данных регистрации качества воздуха на крыше расчет средней концентрации каждого загрязняющего вещества на крыше поезда в течение времени работы со времени отбытия от станции отправления до текущего времени, показателя Q0 всесторонней оценки качества воздуха на крыше и времени T0 воздействия на компоненты крыши при условии Q0≥Q; и привлечение обученной модели вычисления состояния загрязнения около компонента крыши при условии Q0≥Q для расчета уровня загрязнения компонента крыши;
путем использования данных регистрации качества воздуха под вагоном расчет средней концентрации каждого загрязняющего вещества в подвагонной части в течение времени работы со времени отбытия от станции отправления до текущего времени, показателя Q1 всесторонней оценки качества воздуха под вагоном и времени T1 воздействия на подвагонные компоненты при условии Q1≥Q; и привлечение обученной модели вычисления состояния загрязнения около подвагонного компонента при условии Q1≥Q для расчета уровня загрязнения подвагонного компонента;
отправку уровня загрязнения компонентов крыши и уровня загрязнения подвагонных компонентов в платформенный центр обработки и хранения данных;
платформенный центр обработки и хранения данных, выполненный с возможностью принимать уровень загрязнения компонентов крыши и уровень загрязнения подвагонных компонентов, отправленных модулем обработки данных, и отправлять инструкции защиты в платформенный исполнительный модуль согласно принимаемым уровню загрязнения компонентов крыши и уровню загрязнения подвагонных компонентов; и
платформенный исполнительный модуль, предназначенный выполнять соответствующую очистку компонентов крыши и/или подвагонных компонентов согласно инструкциям защиты, отправленным платформенным центром обработки и хранения данных.
В качестве предпочтительного режима, как модуль регистрации качества воздуха на крыше, так и модуль регистрации качества воздуха под вагоном включают в себя одно или более из датчика концентрации CO2, датчика концентрации NO2, датчика концентрации SO2, датчика концентрации PM2,5, датчика концентрации VOC и датчика концентрации пыли.
В качестве предпочтительного режима модуль регистрации качества воздуха на крыше включает в себя одно или более устройств регистрации качества воздуха на крыше, и устройства регистрации качества воздуха на крыше, соответственно, размещаются в головной части, средней части и хвостовой части каждого отсека; модуль регистрации качества воздуха под вагоном включает в себя одно или более устройств регистрации качества воздуха под вагоном, и устройства регистрации качества воздуха под вагоном, соответственно, размещаются в головной части, средней части и хвостовой части каждого отсека; и каждые три отсека совместно используют модуль обработки данных.
В качестве предпочтительного режима платформенный исполнительный модуль включает в себя беспилотную станцию на платформе и терминал для человеко-машинного взаимодействия, при этом как беспилотная станция на платформе, так и терминал для человеко-машинного взаимодействия соединяются с платформенным центром обработки и хранения данных; беспилотная станция на платформе включает в себя один или более беспилотных аппаратов, и каждый беспилотный аппарат снабжен устройством распыления и очистки и осветительным оборудованием, и терминал для человеко-машинного взаимодействия включает в себя компьютер для приема инструкций.
Настоящее изобретение предоставляет способ и систему для защиты работы поезда в загрязняющей воздушной среде на основе глубоких сетевых моделей, один или более модулей регистрации качества воздуха размещаются на поезде для получения данных качества воздуха около пантографа на крыше и подвижного участка подвагонной части, полученные данные обрабатываются и анализируются, и защита от загрязнения выполняется путем комбинации способов распыления с беспилотного аппарата и обслуживания вручную, что имеет следующие преимущества:
(1) Путем эффективного контроля в режиме реального времени качества воздуха около компонентов крыши и подвагонной части в ходе работы можно получать время, когда открытые для воздействия важнейшие компоненты поезда подвергаются воздействию загрязняющих веществ, и может вызываться режим очистки, используемый при остановке.
(2) Режим компоновки точек контроля для всестороннего контроля и многоточечного контроля крыши и подвагонной части исключает ошибки регистрации, вызываемые различными состояниями воздуха на крыше и под вагоном, и гарантирует точность полученных результатов.
(3) Различные стратегии защиты с помощью очистки выбираются согласно времени, когда компоненты крыши и подвагонной части подвергаются воздействию загрязняющих веществ, в результате чего уменьшаются адгезия и коррозия загрязняющими веществами в воздухе важнейших компонентов поезда и продлеваются сроки службы соответствующих важнейших компонентов поезда.
(4) Состояние загрязнения важнейших компонентов поезда разделяется на различные уровни, наиболее обоснованная стратегия защиты с помощью очистки выбирается согласно различным уровням состояния загрязнения, и комбинация распыления с беспилотного аппарата и обслуживания вручную гарантирует защитный эффект и освобождает рабочую силу в максимально возможной степени.
(5) Уровни состояния загрязнения компонентов крыши и подвагонных компонентов вычисляются с помощью глубоких сетей, что гарантирует эффективность способа защиты с помощью очистки после остановки поезда.
Краткое описание чертежей
Фиг. 1 является принципиальной схемой варианта осуществления системы согласно настоящему изобретению.
Фиг. 2 является блок-схемой последовательности операций варианта осуществления способа согласно настоящему изобретению.
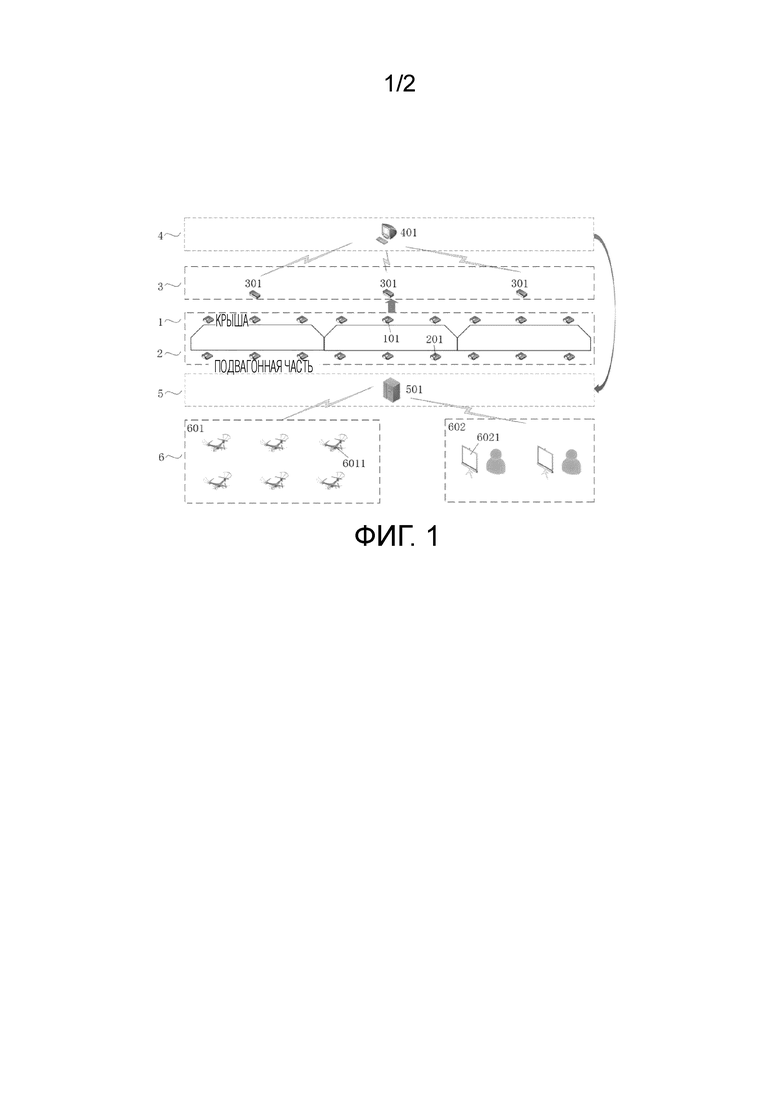
На фигурах: 1 - модуль регистрации качества воздуха на крыше, 101 - устройство регистрации качества воздуха на крыше, 2 - модуль регистрации качества воздуха под вагоном, 201 - устройство регистрации качества воздуха под вагоном, 3 - модуль передачи данных, 301 - модуль беспроводной передачи, 4 - модуль обработки данных, 401 - центральный компьютер, 5 - платформенный центр обработки и хранения данных, 501 - платформенный компьютер, 6 - платформенный исполнительный модуль, 601 - беспилотная станция на платформе, 6011 - беспилотный аппарат, 602 - терминал для человеко-машинного взаимодействия, 6021 - компьютер для приема инструкций.
Подробное описание вариантов осуществления
Настоящее изобретение предоставляет способ и систему для защиты работы поезда в загрязняющей воздушной среде, которые позволяют контролировать концентрацию загрязняющих веществ в воздухе в открытых для воздействия позициях важнейших компонентов на крыше и под вагоном высокоскоростного поезда в режиме реального времени, получать уровни состояния загрязнения соответствующих важнейших компонентов в ходе работы путем использования глубокой сети согласно измеренной концентрации загрязняющих веществ и выбирать обоснованные способы очистки после парковки. Состояние загрязнения важнейших компонентов получают путем обучения глубокой сети, ввод (входной сигнал) модели представляет собой различные измеренные данные, и вывод (выходной сигнал) представляет собой уровни состояния загрязнения.
Как показано на фиг. 1, вся система для защиты работы поезда в загрязняющей воздушной среде, включает в себя модуль 1 регистрации качества воздуха на крыше, модуль 2 регистрации качества воздуха под вагоном, модуль 3 передачи данных, модуль 4 обработки данных, платформенный центр 5 обработки и хранения данных и платформенный исполнительный модуль 6. Подробности соответствующих модулей заключаются в следующем:
Модуль 1 регистрации качества воздуха на крыше: этот модуль состоит из устройств 101 регистрации качества воздуха на крыше, соответственно размещаемых на верху каждого отсека. Каждое устройство 101 регистрации качества воздуха на крыше включает в себя датчик концентрации CO2, датчик концентрации NO2, датчик концентрации SO2, датчик концентрации PM2,5, VOC-датчик и датчик пыли. Устройства 101 регистрации качества воздуха на крыше, соответственно, размещаются в головной части, средней части и хвостовой части крыши каждого отсека (купе). Данные, полученные модулем 1 регистрации качества воздуха на крыше, передаются в модуль 4 обработки данных модулем 3 передачи данных.
Модуль 2 регистрации качества воздуха под вагоном: этот модуль состоит из устройств 201 регистрации качества воздуха под вагоном, соответственно размещаемых на дне каждого отсека. Каждое устройство 201 регистрации качества воздуха под вагоном включает в себя датчик концентрации CO2, датчик концентрации NO2, датчик концентрации SO2, датчик концентрации PM2,5, VOC-датчик и датчик пыли. Устройства 201 регистрации качества воздуха под вагоном, соответственно размещаются в головной части, средней части и хвостовой части дна каждого отсека. Данные, полученные модулем 2 регистрации качества воздуха под вагоном, передаются в модуль 4 обработки данных модулем 3 передачи данных.
Модуль 3 передачи данных: модуль 3 передачи данных включает в себя модули 301 беспроводной передачи, и каждый отсек оснащается устройством беспроводной передачи, соединяющим модуль 1 регистрации качества воздуха на крыше, модуль 2 регистрации качества воздуха под вагоном и модуль 4 обработки данных, для сохранения полученных данных и передачи данных между различными модулями. С учетом длины поезда, данные могут передаваться через 4G-сеть, что является экономичным и простым.
Модуль 4 обработки данных: центральный компьютер 401 оснащается для каждых трех отсеков, которые задаются в качестве области контроля качества воздуха, и составляет модуль 4 обработки данных. Центральный компьютер 401 выполнен с возможностью принимать полученные данные качества воздуха важнейших компонентов крыши и полученные данные качества воздуха важнейших подвагонных компонентов, полученные из трех отсеков в пределах диапазона контроля, выполнять предварительную обработку данных и обучение модели, соответственно, и выводить результаты обучения модели в режиме реального времени.
Платформенный центр 5 обработки и хранения данных: этот модуль включает в себя платформенный компьютер 501, который выполнен с возможностью принимать данные уровней состояния загрязнения важнейших компонентов, отправленные модулем 4 обработки данных поезда, выбирать соответствующие способы очистки и защиты согласно различным результатам приема и отправлять инструкции защиты в беспилотную станцию 601 на платформе или терминал 602 для человеко-машинного взаимодействия.
Платформенный исполнительный модуль 6: включающий в себя беспилотную станцию 601 на платформе и терминал 602 для человеко-машинного взаимодействия. Как беспилотная станция 601 на платформе, так и терминал 602 для человеко-машинного взаимодействия соединяются с платформенным центром 5 обработки и хранения данных.
Беспилотная станция 601 на платформе: этот модуль состоит из защитных беспилотных аппаратов 6011, беспроводного приемо-передающего инструкции устройства и зарядной платформы, при этом беспроводное приемо-передающее инструкции устройство выполнено с возможностью принимать инструкции защиты от платформенного компьютера 501, и зарядная платформа выполнена с возможностью заряжать беспилотные аппараты 6011. Беспроводное приемо-передающее инструкции устройство и зарядная платформа не показаны на чертежах, но они не влияют на понимание и реализацию настоящего изобретения специалистами в данной области техники. После приема инструкций защиты от платформенного центра 5 обработки и хранения данных беспилотные аппараты 6011 автономно идентифицируют загрязненные важнейшие компоненты (расположенные на крыше или под вагоном) и выполняют легкую или глубокую очистку. Каждый защитный беспилотный аппарат 6011 оснащается устройством распыления и очистки и осветительным оборудованием.
Терминал 602 для человеко-машинного взаимодействия: этот модуль включает в себя компьютер 6021 для приема инструкций, который выполнен с возможностью принимать инструкции по обслуживанию вручную, отправленные центром обработки и хранения данных 5 станции, и отображать их на интерактивном интерфейсе.
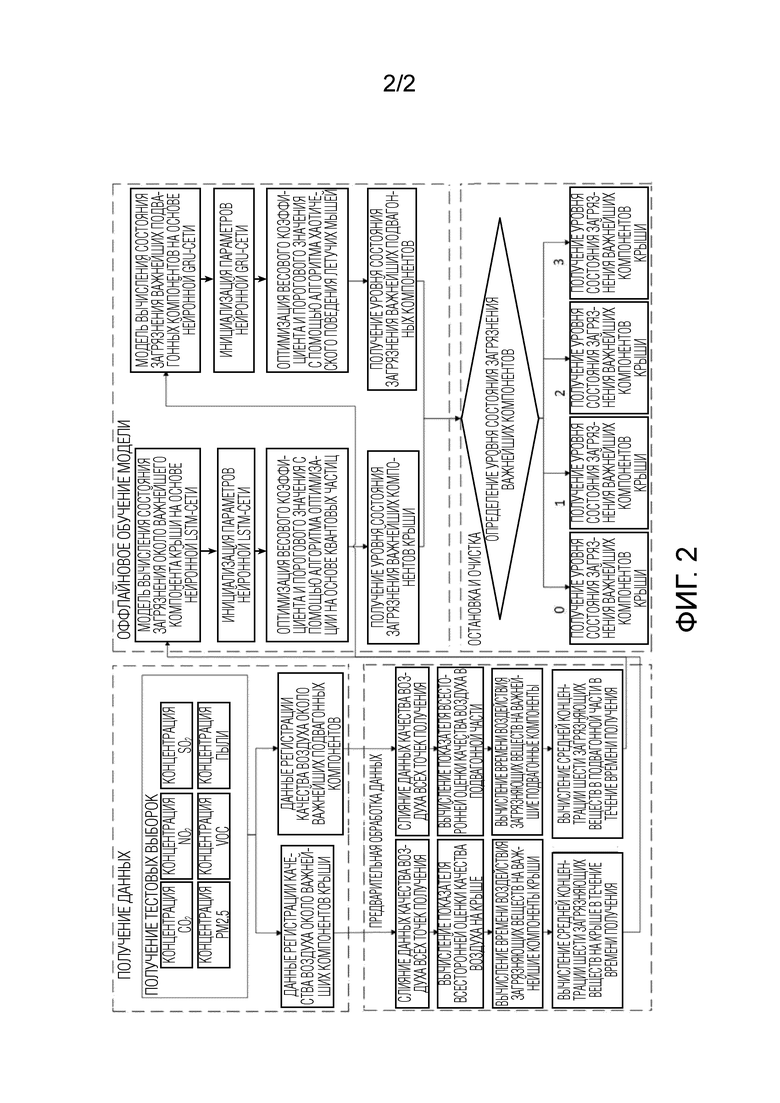
Как показано на фиг. 2, вест способ защиты работы поезда в загрязняющей воздушной среде включает в себя два процесса: процесс оффлайнового обучения и процесс онлайновой защиты, когда поезд останавливается.
Процесс оффлайнового обучения
В способе по настоящему изобретению сначала получают информацию о концентрации загрязняющих веществ в воздухе пространства, где расположены важнейшие компоненты крыши и подвагонные компоненты, и затем отправляют полученные данные в центральный компьютер 401 в соответствующей области регистрации для предварительной обработки данных и обучения модели. Модель обучения включает в себя две глубоких сетевых модели, которые выполнены с возможностью получать уровни состояния загрязнения важнейших компонентов согласно измеренной концентрации загрязняющих веществ. Весь оффлайновый процесс описывается следующим образом:
1. Получение данных качества воздуха пространства, где расположены важнейшие компоненты крыши и подвагонные компоненты
Концентрацию различных загрязняющих веществ получают устройством 101 регистрации качества воздуха на крыше и устройства 201 регистрации качества воздуха под вагоном, при этом полученные данные регистрации качества воздуха на крыше выражаются как  , и данные регистрации качества воздуха под вагоном выражаются как
, и данные регистрации качества воздуха под вагоном выражаются как  . Чтобы отличать данные, полученные устройствами регистрации качества воздуха в различных положениях в различных отсеках, формат конечных данных качества воздуха на крыше, отправленных модулем 301 беспроводной передачи, представляет собой
. Чтобы отличать данные, полученные устройствами регистрации качества воздуха в различных положениях в различных отсеках, формат конечных данных качества воздуха на крыше, отправленных модулем 301 беспроводной передачи, представляет собой  и
и  , где t представляет момент времени получения группы данных; n представляет номер отсека; m представляет номер устройства регистрации качества воздуха, m=1, 2, 3; 0/1 является идентификационным кодом типа данных, 0 представляет то, группа данных является данными регистрации качества воздуха на крыше, и 1 представляет то, что группа данных является данными регистрации качества воздуха под вагоном.
, где t представляет момент времени получения группы данных; n представляет номер отсека; m представляет номер устройства регистрации качества воздуха, m=1, 2, 3; 0/1 является идентификационным кодом типа данных, 0 представляет то, группа данных является данными регистрации качества воздуха на крыше, и 1 представляет то, что группа данных является данными регистрации качества воздуха под вагоном.
2. Предварительная обработка данных
Данные устройства 101 регистрации качества воздуха на крыше и устройства 201 регистрации качества воздуха под вагоном передаются в центральный компьютер 401 из модуля 4 обработки данных через модуль 301 беспроводной передачи для предварительной обработки полученных данных. Все этапы предварительной обработки данных заключаются в следующем:
(1) Согласно идентификационному коду 0/1 и значению m каждой группы данных, полученные данные точек регистрации качества воздуха во всех важнейших компонентах крыши и обнаруженные данные точек регистрации качества воздуха во всех важнейших подвагонных компонентах усредняются, и концентрация шести загрязняющих веществ нормализуется для получения в итоге полных данных регистрации качества воздуха на крыше  и полных данных регистрации качества воздуха под вагоном
и полных данных регистрации качества воздуха под вагоном  целевого регистрируемого отсека.
целевого регистрируемого отсека.
(2) Вычисляется показатель всесторонней оценки качества воздуха, и способ вычисления показателя всесторонней оценки качества воздуха задается как:
Q = Концентрация CO2 × p1 + концентрация NO2 × p2 + концентрация SO2 × p3 + концентрация PM2,5 × p4 + концентрация VOC × p5 + концентрация пыли × p6,
где p представляет весовые коэффициенты концентрации различных загрязняющих веществ, p1=0,1, p2=0,1, p3=0,1, p4=0,3, p5=0,2 и p6=0,2. Затем конечные данные регистрации качества воздуха на крыше и под вагоном, полученные на этапе (1), подставляются в вышеприведенное уравнение для вычисления, чтобы получить показатель Q0 всесторонней оценки качества воздуха на крыше и показатель Q1 всесторонней оценки качества воздуха под вагоном.
(3) Безопасное значение показателя всесторонней оценки качества воздуха задают как q, соответственно вычисляют моменты времени, в которые удовлетворяются условия Q0≥Q и Q1≥Q, и получают время T0 воздействия на важнейшие компоненты крыши загрязняющими веществами при условии Q0≥Q и время T1 воздействия на важнейшие подвагонные компоненты загрязняющими веществами при условии Q1≥Q.
(4) Вычисляют среднюю концентрацию  и
и  шести загрязняющих веществ в течение времени работы поезда со времени отбытия от станции отправления до текущего момента времени.
шести загрязняющих веществ в течение времени работы поезда со времени отбытия от станции отправления до текущего момента времени.
3. Обучение модели вычисления состояния загрязнения около важнейшего компонента поезда.
(1) Обучение модели вычисления состояния загрязнения около компонента крыши
Данные качества воздуха на крыше измеряют при экспериментальных условиях вне помещений, выбирают 1000 групп различных степеней данных качества воздуха на крыше, затем выполняют операцию моделирования в помещениях для каждой группы экспериментальных данных из 1000 групп при экспериментальных условиях моделирования для получения состояний загрязнения пантографа при различных условиях, и задают четыре уровня 0, 1, 2 и 3 загрязнения согласно общему состоянию загрязнения.
Модель вычисления состояния загрязнения около компонента крыши обучается с использованием глубокой сети на основе долгой краткосрочной памяти (LSTM). Ввод обучения модели представляет собой усредненные данные регистрации качества воздуха на крыше и время воздействия загрязняющих веществ на важнейшие компоненты крыши  , вывод представляет собой уровни 0, 1, 2 и 3 состояния загрязнения пантографа, полученные при моделированных экспериментальных условиях, в результате чего получают модель вычисления состояния загрязнения около компонента крыши на основе глубокой LSTM-сети.
, вывод представляет собой уровни 0, 1, 2 и 3 состояния загрязнения пантографа, полученные при моделированных экспериментальных условиях, в результате чего получают модель вычисления состояния загрязнения около компонента крыши на основе глубокой LSTM-сети.
Входной слой глубокой LSTM-сети включает в себя 7 узлов, выходной слой включает в себя 1 узел, максимальное число итераций в процессе обучения задается на 1200, и темп обучения при обучении составляет 0,01.
В модели вычисления состояния загрязнения около компонента крыши на основе глубокой LSTM-сети, весовой коэффициент и пороговое значение глубокой LSTM-сети получают путем оптимизации с использованием роя квантовых частиц с адаптивными весовыми коэффициентами. Процесс заключается в следующем:
Этап A1: используя вектор положения каждой отдельной квантовой частицы в роях квантовых частиц в качестве весового коэффициента и порогового значения глубокой LSTM-сети, параметр вектора положения отдельной квантовой частицы в рое частиц инициализируют как случайное число в диапазоне [-1, 1];
Число роев квантовых частиц составляет в диапазоне [30, 100], число частиц в рое квантовых частиц составляет в диапазоне [4, 60], максимальное число итераций составляет в диапазоне [300, 1200], число итераций для формирования элитного роя составляет в диапазоне [50, 200], пороговое значение определения преждевременной сходимости составляет в диапазоне [0,02, 0,5], и наихудший коэффициент δ% варьирования частиц между роями составляет в диапазоне [1%, 6%];
Этап A2: задается функция пригодности, и определяются вектор положения начальной оптимальной отдельной квантовой частицы и число t итераций, t=1;
Весовой коэффициент и пороговое значение, соответствующие вектору положения отдельной квантовой частицы, подставляются в модель вычисления состояния загрязнения около компонента крыши на основе глубокой LSTM-сети, тип идентификационной векторной метки определяется путем использования модели вычисления состояния загрязнения около компонента крыши на основе глубокой LSTM-сети, определенной по вектору положения отдельной квантовой частицы и обратной величины среднеквадратической ошибки выходной векторной метки, и фактическая векторная метка используется в качестве второй функции пригодности;
Этап A3: вычисляется дисперсия пригодности колонии каждого роя квантовых частиц, и выполняется определение преждевременной сходимости;
Если дисперсия пригодности роя для роя квантовых частиц меньше порогового значения γ определения преждевременной сходимости, δ% частиц с наихудшей пригодностью и частица с экстремальным значением колонии в рое квантовых частиц видоизменяются, и отдельная частица с наилучшей пригодностью в данный момент используется в качестве глобальной оптимальной отдельной квантовой частицы;
Этап A4: определяется, следует ли формировать элитный рой;
Когда число итераций превышает число итераций элитного роя, экстремальные значения различных роев извлекаются посредством совместного использования информации между роями для формирования элитного роя, и осуществляют переход к этапу A8, в противном случае - выполняется этап A5;
Этап A5: обновляются параметры частиц различных роев;
Этап A6: для каждой частицы повторно вычисляется значение пригодности частицы, и значение пригодности частицы сравнивается с текущим отдельным экстремальным значением частицы, если значение пригодности частицы превосходит текущее отдельное экстремальное значение частицы, отдельное экстремальное значение частицы обновляется; текущее экстремальное значение колонии частицы с глобальным экстремальным значением сравнивается со значением пригодности каждой частицы, если значение пригодности частицы превосходит текущее экстремальное значение колонии, частица с глобальным экстремальным значением обновляется, допускается t=t+1 и переходят к этапу A3;
Этап A7: элитный рой продолжает развертываться;
Этап A8: определяется, удовлетворяется ли максимальное число итераций, и, если максимальное число итераций удовлетворяется, осуществляют выход из процесса, в противном случае - допускается t=t+1 и переходят к этапу A3 до тех пор, пока не будет найдено глобальное оптимальное значение; и выводятся весовой коэффициент и пороговое значение глубокой LSTM-сети.
(2) Обучение модели вычисления состояния загрязнения около подвагонного компонента
Измеряют данные качества воздуха под вагоном при экспериментальных условиях вне помещений, выбирают 1000 групп различных степеней данных качества воздуха под вагоном, затем выполняют операцию моделирования в помещениях для каждой группы экспериментальных данных из 1000 групп при экспериментальных условиях моделирования для получения состояния загрязнения подвижного участка при различных условиях, и задают четыре уровня 0, 1, 2 и 3 загрязнения согласно общему состоянию загрязнения.
Модель вычисления состояния загрязнения около подвагонного компонента обучается с использованием глубокой сети на основе стробированных рекуррентных единиц (управляемого рекуррентного блока) (GRU). Ввод обучения модели представляет собой усредненные данные регистрации качества воздуха под вагоном и время воздействия загрязняющих веществ на важнейшие подвагонные компоненты  , вывод представляет собой уровни 0, 1, 2 и 3 состояния загрязнения подвижного участка, полученные при моделированных экспериментальных условиях, в результате чего получают модель вычисления состояния загрязнения около подвагонного компонента на основе глубокой GRU-сети.
, вывод представляет собой уровни 0, 1, 2 и 3 состояния загрязнения подвижного участка, полученные при моделированных экспериментальных условиях, в результате чего получают модель вычисления состояния загрязнения около подвагонного компонента на основе глубокой GRU-сети.
В модели вычисления состояния загрязнения около подвагонного компонента на основе глубокой GRU-сети, число входных узлов слоя составляет 7, число скрытых узлов слоя составляет 5, и число выходных узлов слоя составляет 1; максимальное число итераций в процессе обучения задается на 800, темп обучения при обучении составляет 0,01, и пороговое значение составляет 0,06.
Весовой коэффициент и пороговое значение модели вычисления состояния загрязнения около подвагонного компонента на основе глубокой GRU-сети подвергаются выбору для оптимизации через алгоритм хаотического поведения летучих мышей. Процесс заключается в следующем:
Этап B1: используя положение отдельной летучей мыши в качестве весового коэффициента и пороговое значение модели вычисления состояния загрязнения около подвагонного компонента на основе глубокой GRU-сети, инициализируют рои летучих мышей и задают параметры роев летучих мышей;
Размер роя летучих мышей составляет в диапазоне [300, 600], максимальная частота r0 импульсов отдельной летучей мыши составляет в диапазоне [0,3, 0,6], максимальная интенсивность A0 импульсного звука составляет в диапазоне [0,3, 0,6], максимальное число итераций составляет в диапазоне [200, 500], точность поиска составляет в диапазоне [0,002, 0,2], частота импульсов составляет в диапазоне [0, 1,8], увеличенный коэффициент частоты поиска летучих мышей составляет в диапазоне [0,04, 0,1], коэффициент ослабления интенсивности звука составляет в диапазоне [0,75, 0,1], максимальное число итераций составляет в диапазоне [200, 800], и максимальная точность поиска составляет в диапазоне [0,02, 0,15];
Этап B2: задают функцию пригодности, и определяют положение начальной оптимальной отдельной летучей мыши и число t итераций, t=1;
весовой коэффициент и пороговое значение, соответствующие положению отдельной летучей мыши, подставляют в модель вычисления состояния загрязнения около подвагонного компонента на основе глубокой GRU-сети, получают результат регистрации путем использования модели вычисления состояния загрязнения около подвагонного компонента на основе глубокой GRU-сети, определенной по положению отдельной летучей мыши, и конструируют первую функцию f1(E) пригодности по разности E между результатом регистрации и фактической ситуацией, f1(E)=1/(E+1);
Пригодность положения каждой отдельной летучей мыши вычисляют путем использования первой функции пригодности, и положение отдельной летучей мыши, соответствующее максимальной пригодности, используется в качестве положения начальной оптимальной отдельной летучей мыши;
Этап B3: скорость и положение отдельной летучей мыши обновляют путем использования заданной частоты импульсов;
Этап B4: если Rand1>ri, летучая мышь в оптимальном отдельном положении случайным образом возмущается формированием возмущенного положения отдельной летучей мыши;
где Rand1 является случайным числом, равномерно распределенным на [0, 1], и ri является частотой импульсов i-ой летучей мыши;
Этап B5: если Rand2>Ai и пригодность возмущенного положения отдельной летучей мыши превосходит пригодность положения отдельной летучей мыши перед возмущением, отдельная летучая мышь перемещается в возмущенное положение, либо, в противном случае, отдельная летучая мышь поддерживается в первоначальном положении;
где Rand2 является случайным числом, равномерно распределенным на [0, 1], и Ai является интенсивностью звука i-ой летучей мыши;
Этап B6: если условие этапа B5 удовлетворяется, частота импульсов и интенсивность импульсного звука отдельной летучей мыши обновляют путем использования увеличенного коэффициента частоты поиска летучих мышей и коэффициента ослабления интенсивности звука, и процесс переходит к этапу B4, либо, в противном случае, переходят к этапу B7;
Этап B7: вычисляют пригодность положения каждой отдельной летучей мыши в текущем рое летучих мышей, и выполняют хаотическую оптимизацию положения и скорости для первых m% отдельных летучих мышей в порядке убывания, чтобы получить обновленные первые m% отдельные летучие мыши, при этом m составляет в диапазоне [4, 25];
Этап B8: определяют, достигается ли максимальное число итераций или максимальная точность поиска; если оно(а) достигается, глобальную оптимальную отдельную летучую мышь выбирают из обновленных первых m% отдельных летучих мышей согласно значению пригодности, и выводят (выдают) оптимальный весовой коэффициент и пороговое значение модели вычисления состояния загрязнения около подвагонного компонента на основе глубокой GRU-сети, соответствующие глобальной оптимальной отдельной летучей мыши; в противном случае допускают t=t+1 и выполняют этап B3 для продолжения следующей итерации.
Процесс онлайновой защиты, когда поезд останавливается
(1) После остановки поезда для некоторого регистрируемого отсека модуль 1 регистрации качества воздуха на крыше и модуль 2 регистрации качества воздуха под вагоном получают данные, и модуль 301 беспроводной передачи передает эти данные в модуль 4 обработки данных для предварительной обработки, чтобы получить среднюю концентрацию шести загрязняющих веществ на крыше и под вагоном поезда в течение времени работы со времени отбытия от станции отправления до текущего времени, показатель Q0 всесторонней оценки качества воздуха на крыше и показатель Q1 всесторонней оценки качества воздуха в подвагонной части, а также время T0 воздействия загрязняющих веществ на важнейшие компоненты крыши и время T1 воздействия загрязняющих веществ на важнейшие подвагонные компоненты.
(2) Модуль 4 обработки данных вычисляет уровень 0/1/2/3 состояния загрязнения важнейшего компонента крыши через обученную модель вычисления состояния загрязнения около компонента крыши на основе глубокой LSTM-сети, и модуль 4 обработки данных вычисляет уровень 0/1/2/3 состояния загрязнения важнейшего подвагонного компонента через обученную модель вычисления состояния загрязнения около подвагонного компонента на основе глубокой GRU-сети. Модуль 4 обработки данных передает уровни состояния загрязнения крыши и под вагоном (нижней части вагона) в платформенный центр 5 обработки и хранения данных.
(3) Когда уровень загрязнения важнейших компонентов на крыше или под вагоном составляет 0, считается, что важнейшие компоненты поезда не загрязнены и очистка при остановке поезда не требуется; когда уровень загрязнения важнейших компонентов на крыше или подвагонных компонентов составляет 1, состояние загрязнения важнейших компонентов поезда считается относительно слабым, и беспилотная станция 601 на платформе вызывается для легкой очистки; когда уровень загрязнения важнейших компонентов на крыше или подвагонных компонентов составляет 2, состояние загрязнения важнейших компонентов поезда считается нормальным, и беспилотная станция 601 на платформе вызывается для глубокой очистки; и когда уровень загрязнения важнейших компонентов на крыше или подвагонных компонентов составляет 3, состояние загрязнения важнейших компонентов поезда считается значительным, и в терминал 602 для человеко-машинного взаимодействия отправляется инструкция очистки (команда на очистку) на применение очистки вручную.
(4) Беспилотный аппарат 6011 на платформе идентифицирует пантограф и подвижный участок поезда через камеру и нависает; после того, как беспилотный аппарат 6011 начинает работать и нависает более 5 с, устройство распыления и очистки срабатывает автоматически, при этом время работы устройства распыления и очистки составляет 1 мин в ходе легкой очистки, и время работы устройства распыления и очистки составляет 3 мин в ходе глубокой очистки.
Настоящая заявка дополнительно предоставляет способ расчета уровня загрязнения компонентов крыши и уровня загрязнения подвагонных компонентов около поезда в загрязняющей воздушной среде, при этом способ содержит следующие этапы:
этап 1, получение нескольких групп данных регистрации качества воздуха на крыше и данных регистрации качества воздуха под вагоном и вычисление средней концентрации каждого загрязняющего вещества на крыше и под вагоном поезда в течение времени работы со времени отбытия от станции отправления до текущего времени;
этап 2, расчет показателя Q0 всесторонней оценки качества воздуха на крыше путем использования данных регистрации качества воздуха на крыше по этапу 1 и расчет показателя Q1 всесторонней оценки качества воздуха под вагоном путем использования данных регистрации качества воздуха под вагоном на этапе 1;
этап 3, вычисление времени T0 воздействия на компоненты крыши при условии Q0≥Q и вычисление времени T1 воздействия на подвагонные компоненты при условии Q1≥Q; при этом Q является заданным безопасным значением показателя всесторонней оценки качества воздуха;
этап 4, обучение модели вычисления состояния загрязнения около компонента крыши согласно следующему способу:
моделирование работы поезда путем использования вычисленной на этапе 1 средней концентрации каждого загрязняющего вещества на крыше поезда в течение времени работы со времени отбытия от станции отправления до текущего времени и соответствующего T0, рассчитанного на этапе 3, в качестве экспериментальных условий моделирования для получения уровня G0 загрязнения компонентов крыши при различных экспериментальных условиях моделирования, при этом степень загрязнения компонентов крыши классифицируется в качестве G-уровней; и
обучение модели вычисления состояния загрязнения около компонента крыши путем использования вычисленной на этапе 1 средней концентрации каждого загрязняющего вещества на крыше поезда в течение времени работы со времени отбытия от станции отправления до текущего времени и соответствующего T0, рассчитанного на этапе 3, в качестве ввода и использование G0 в качестве вывода с получением обученной модели вычисления состояния загрязнения около компонента крыши;
обучение модели вычисления состояния загрязнения около подвагонного компонента согласно следующему способу:
моделирование работы поезда путем использования вычисленной на этапе 1 средней концентрации каждого загрязняющего вещества в подвагонной части поезда в течение времени работы со времени отбытия от станции отправления до текущего времени и соответствующего T1, рассчитанного на этапе 3, в качестве экспериментальных условий моделирования для получения уровня G1 загрязнения подвагонных компонентов при различных экспериментальных условиях моделирования, при этом степень загрязнения подвагонных компонентов классифицируется в качестве G-уровней; и
обучение модели вычисления состояния загрязнения около подвагонного компонента путем использования вычисленной на этапе 1 средней концентрации каждого загрязняющего вещества в подвагонной части поезда в течение времени работы со времени отбытия от станции отправления до текущего времени и соответствующего T1, рассчитанного на этапе 3, в качестве ввода и использование G1 в качестве вывода с получением обученной модели вычисления состояния загрязнения около подвагонного компонента;
этап 5, получение после остановки поезда данных регистрации качества воздуха на крыше и данных регистрации качества воздуха в подвагонной части;
этап 6, путем использования данных регистрации качества воздуха на крыше по этапу 5 расчет средней концентрации каждого загрязняющего вещества на крыше поезда в течение времени работы со времени отбытия от станции отправления до текущего времени, показателя Q0 всесторонней оценки качества воздуха на крыше и времени T0 воздействия на компоненты крыши при условии Q0≥Q; и привлечение обученной модели вычисления состояния загрязнения около компонента крыши при условии Q0≥Q для расчета уровня загрязнения компонентов крыши; и
путем использования данных регистрации качества воздуха под вагоном по этапу 5 расчет средней концентрации каждого загрязняющего вещества в подвагонной части поезда в течение времени работы со времени отбытия от станции отправления до текущего времени, показателя Q1 всесторонней оценки качества воздуха под вагоном и времени T1 воздействия на подвагонные компоненты при условии Q1≥Q; и привлечение обученной модели вычисления состояния загрязнения около подвагонного компонента при условии Q1≥Q для расчета уровня загрязнения подвагонных компонентов.
Выше описываются варианты осуществления настоящего изобретения со ссылкой на чертежи, но настоящее изобретение не ограничено конкретными вариантами осуществления. Вышеописанные конкретные варианты осуществления являются лишь иллюстративными, а не ограничивающими. Специалисты в данной области техники также могут выполнить множество форм согласно сведениям по настоящему изобретению без отступления от назначения настоящего изобретения и объема формулы изобретения, и эти формы попадают в объем настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА МОНИТОРИНГА КАЧЕСТВА ВНУТРЕННЕГО ВОЗДУХА И УПРАВЛЕНИЯ ВЕНТИЛЯЦИЕЙ ДЛЯ ПОЕЗДА | 2020 |
|
RU2762983C1 |
| ОПРЕДЕЛЕНИЕ ПРОДОЛЖИТЕЛЬНОСТИ ПОСАДКИ/ВЫСАДКИ ОБЪЕКТА | 2018 |
|
RU2706875C1 |
| Система для гибридного управления работой сортировочных станций с функцией поддержки принятия решений о порядке роспуска составов | 2020 |
|
RU2737817C1 |
| ИНТЕГРИРОВАННЫЙ ПОСТ АВТОМАТИЗИРОВАННОГО ПРИЕМА И ДИАГНОСТИКИ ПОДВИЖНОГО СОСТАВА (ПРИЗМА) | 2019 |
|
RU2720603C1 |
| Система контроля сохранности элементов подвижного состава | 2023 |
|
RU2811171C1 |
| Система для управления работой сортировочных станций | 2021 |
|
RU2767403C1 |
| Система оперативного управления движением транзитных поездов | 2019 |
|
RU2723051C1 |
| СПОСОБ УДАЛЕНИЯ ЗАГРЯЗНЕНИЙ И ПОКРЫТИЙ | 2001 |
|
RU2200638C2 |
| Система для управления работой сортировочных станций направления железнодорожной сети | 2018 |
|
RU2671790C1 |
| Кузов вагона высокоскоростного поезда | 2024 |
|
RU2832948C1 |
Использование: для защиты работы поезда в загрязняющей атмосферной среде. Сущность изобретения заключается в том, что осуществляют сбор нескольких групп данных регистрации качества воздуха на крыше и под вагоном; получение показателей Q0 и Q1 всесторонней оценки качества воздуха на крыше и под вагоном путем использования экспериментальных данных; вычисление времени T0 воздействия на компоненты крыши и времени T1 воздействия на подвагонные компоненты; обучение модели вычисления состояния загрязнения компонента крыши и модели вычисления состояния загрязнения подвагонного компонента; обнаружение данных регистрации качества воздуха на крыше и под вагоном после остановки поезда; привлечение моделей вычисления состояния загрязнения компонента крыши и подвагонного компонента для получения уровней загрязнения компонента крыши и подвагонного компонента; и выполнение соответствующих очистки и процесса защиты компонента крыши и подвагонного компонента согласно полученным уровням загрязнения компонента крыши и подвагонного компонента. Технический результат: обеспечение возможности выполнять защитные меры, чтобы гарантировать нормальные сроки службы важнейших компонентов поезда. 3 н. и 8 з.п. ф-лы, 2 ил.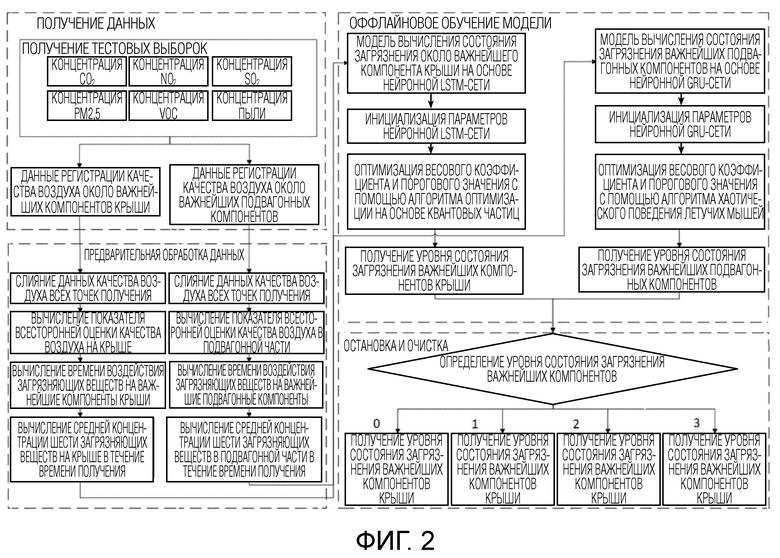
1. Способ защиты работы поезда в загрязняющей воздушной среде, при этом способ содержит следующие этапы:
этап 1, собирают несколько групп данных регистрации качества воздуха на крыше и данных регистрации качества воздуха под вагоном и вычисляют среднюю концентрацию каждого загрязняющего вещества на крыше и под вагоном поезда в течение времени работы со времени отбытия со станции отправления до текущего времени;
этап 2, рассчитывают показатель Q0 всесторонней оценки качества воздуха на крыше путем использования данных регистрации качества воздуха на крыше по этапу 1 и рассчитывают показатель Q1 всесторонней оценки качества воздуха под вагоном путем использования данных регистрации качества воздуха под вагоном по этапу 1;
этап 3, вычисляют время T0 воздействия на компоненты крыши при условии Q0≥Q и вычисляют время T1 воздействия на подвагонные компоненты при условии Q1≥Q; при этом Q является заданным безопасным значением показателя всесторонней оценки качества воздуха;
этап 4,
обучают модель вычисления состояния загрязнения около компонента крыши согласно следующему способу:
моделируют работу поезда путем использования вычисленной на этапе 1 средней концентрации каждого загрязняющего вещества на крыше поезда в течение времени работы со времени отбытия от станции отправления до текущего времени и соответствующего T0, рассчитанного на этапе 3, в качестве экспериментальных условий моделирования для получения уровня G0 загрязнения компонентов крыши при различных экспериментальных условиях моделирования, при этом степень загрязнения компонентов крыши классифицируется в качестве G-уровней; и
обучают модель вычисления состояния загрязнения около компонента крыши путем использования вычисленной на этапе 1 средней концентрации каждого загрязняющего вещества на крыше поезда в течение времени работы со времени отбытия от станции отправления до текущего времени и соответствующего T0, рассчитанного на этапе 3, в качестве ввода и используют G0 в качестве вывода с получением обученной модели вычисления состояния загрязнения около компонента крыши;
обучают модель вычисления состояния загрязнения около подвагонного компонента согласно следующему способу, содержащему этапы, на которых:
моделируют работу поезда путем использования вычисленной на этапе 1 средней концентрации каждого загрязняющего вещества в подвагонной части поезда в течение времени работы со времени отбытия от станции отправления до текущего времени и соответствующего T1, рассчитанного на этапе 3, в качестве экспериментальных условий моделирования для получения уровня G1 загрязнения подвагонных компонентов при различных экспериментальных условиях моделирования, при этом степень загрязнения подвагонных компонентов классифицируется в качестве G-уровней; и
обучают модель вычисления состояния загрязнения около подвагонного компонента путем использования вычисленной на этапе 1 средней концентрации каждого загрязняющего вещества в подвагонной части поезда в течение времени работы со времени отбытия от станции отправления до текущего времени и соответствующего T1, рассчитанного на этапе 3, в качестве ввода и используют G1 в качестве вывода с получением обученной модели вычисления состояния загрязнения около подвагонного компонента;
этап 5, получают после остановки поезда данные регистрации качества воздуха на крыше и данные регистрации качества воздуха в подвагонной части;
этап 6,
путем использования данных регистрации качества воздуха на крыше по этапу 5 рассчитывают среднюю концентрацию каждого загрязняющего вещества на крыше поезда в течение времени работы со времени отбытия от станции отправления до текущего времени, показатель Q0 всесторонней оценки качества воздуха на крыше и время T0 воздействия на компоненты крыши при условии Q0≥Q; и вызывают обученную модель вычисления состояния загрязнения около компонента крыши при условии Q0≥Q для расчета уровня загрязнения компонентов крыши; и
путем использования данных регистрации качества воздуха под вагоном по этапу 5 рассчитывают среднюю концентрацию каждого загрязняющего вещества в подвагонной части поезда в течение времени работы со времени отбытия от станции отправления до текущего времени, показатель Q1 всесторонней оценки качества воздуха под вагоном и время T1 воздействия на подвагонные компоненты при условии Q1≥Q; и вызывают обученную модель вычисления состояния загрязнения около подвагонного компонента при условии Q1≥Q для расчета уровня загрязнения подвагонных компонентов; и
этап 7,
выполняют соответствующую очистку компонентов крыши согласно уровню загрязнения компонентов крыши, рассчитанному на этапе 6; и
выполняют соответствующую очистку подвагонных компонентов согласно уровню загрязнения подвагонных компонентов, рассчитанному на этапе 6.
2. Способ защиты работы поезда в загрязняющей воздушной среде по п. 1, в котором как данные регистрации качества воздуха на крыше, так и данные регистрации качества воздуха под вагоном содержат одно или более из концентрации CO2, концентрации NO2, концентрации SO2, концентрации PM2,5 (твердых веществ размером не более 2,5 мкм), концентрации VOC (летучих органических соединений) и концентрации пыли.
3. Способ защиты работы поезда в загрязняющей воздушной среде по п. 1, в котором данные регистрации качества воздуха на крыше и/или данные регистрации качества воздуха под вагоном получают из нескольких мест контроля.
4. Способ защиты работы поезда в загрязняющей воздушной среде по п. 1, в котором способ вычисления показателя Q0 всесторонней оценки качества воздуха на крыше представляет собой:
Q0 = концентрация CO2 на крыше × p1 + концентрация NO2 на крыше × p2 + концентрация SO2 на крыше × p3 + концентрация PM2,5 × p4 на крыше + концентрация VOC на крыше × p5 + концентрация пыли на крыше × p6;
способ вычисления показателя Q1 всесторонней оценки качества воздуха под вагоном представляет собой:
Q1 = концентрация CO2 под вагоном × p1 + концентрация NO2 под вагоном × p2 + концентрация SO2 под вагоном × p3 + концентрация PM2,5 под вагоном × p4 + концентрация VOC под вагоном × p5 + концентрация пыли под вагоном × p6;
при этом p1, p2, p3, p4, p5 и p6 являются соответствующими весовыми коэффициентами загрязняющих веществ.
5. Способ защиты работы поезда в загрязняющей воздушной среде по п. 1, в котором на этапе 4 модель вычисления состояния загрязнения около компонента крыши обучают с помощью алгоритма на основе глубоких LSTM-сетей (рекуррентных нейронных сетей с долгой краткосрочной памятью), при этом весовой коэффициент и пороговое значение глубокой LSTM-сети получают путем оптимизации с использованием роя квантовых частиц с адаптивными весовыми коэффициентами, при этом алгоритм содержит:
этап A1: используют вектор положения каждой отдельной квантовой частицы в роях квантовых частиц в качестве весового коэффициента и порогового значения глубокой LSTM-сети и инициализируют параметр вектора положения отдельной квантовой частицы роя квантовых частиц в случайное число с диапазоном [-1, 1];
при этом число роев квантовых частиц составляет в диапазоне [30, 100], число частиц в рое квантовых частиц составляет в диапазоне [4, 60], максимальное число итераций составляет в диапазоне [300, 1200], число итераций для формирования элитного роя составляет в диапазоне [50, 200], пороговое значение определения преждевременной сходимости составляет в диапазоне [0,02, 0,5], и 6%-й наихудший коэффициент δ% варьирования частиц между роями составляет в диапазоне [1%, 6%];
этап A2: задают функцию пригодности и определяют вектор положения начальной оптимальной отдельной квантовой частицы и число t итераций, t=1;
подставляют весовой коэффициент и пороговое значение, соответствующие вектору положения отдельной квантовой частицы, в модель вычисления состояния загрязнения около компонента крыши на основе глубокой LSTM-сети, определяют тип идентификационной векторной метки путем использования модели вычисления состояния загрязнения около компонента крыши на основе глубокой LSTM-сети, определенной по вектору положения отдельной квантовой частицы, и используют обратную величину среднеквадратической ошибки выходной векторной метки и фактической векторной метки в качестве второй функции пригодности;
этап A3: вычисляют дисперсию пригодности колонии каждого роя квантовых частиц и выполняют определение преждевременной сходимости;
если дисперсия пригодности колонии роя квантовых частиц меньше порогового значения γ определения преждевременной сходимости, видоизменяют δ% частиц с наихудшей пригодностью и частицу с экстремальным значением колонии в рое квантовых частиц и используют частицу с наилучшей пригодностью в данный момент в качестве глобальной оптимальной отдельной квантовой частицы;
этап A4: определяют, следует ли формировать элитный рой;
когда число итераций превышает число итераций элитного роя, извлекают экстремальные значения различных роев посредством совместного использования информации между роями для формирования элитного роя и переходят к этапу A8, в противном случае выполняют этап A5;
этап A5: обновляют параметры частиц различных роев;
этап A6: для каждой частицы повторно вычисляют значение пригодности частицы и сравнивают значение пригодности частицы с текущим отдельным экстремальным значением частицы, если значение пригодности частицы превосходит текущее отдельное экстремальное значение частицы, обновляют отдельное экстремальное значение частицы; сравнивают текущее экстремальное значение колонии частицы с глобальным экстремальным значением со значением пригодности каждой частицы, если значение пригодности частицы превосходит текущее экстремальное значение колонии, обновляют частицу с глобальным экстремальным значением, допускают t=t+1 и выполняют этап A3;
этап A7: продолжают развертывание элитного роя;
этап A8: определяют, удовлетворяется ли максимальное число итераций, и, если максимальное число итераций удовлетворяется, выходят из процесса, в противном случае допускают t=t+1 и выполняют этап A3 до тех пор, пока не будет найдено глобальное оптимальное значение; и выдают весовой коэффициент и пороговое значение глубокой LSTM-сети.
6. Способ защиты работы поезда в загрязняющей воздушной среде по п. 1, в котором на этапе 4 модель вычисления состояния загрязнения около подвагонного компонента обучают с помощью алгоритма на основе глубоких GRU-сетей (на основе управляемого рекуррентного блока), при этом весовой коэффициент и пороговое значение глубокой GRU-сети получают путем оптимизации с использованием алгоритма хаотического поведения летучих мышей, при этом алгоритм содержит:
этап B1: используют положение отдельной летучей мыши в качестве весового коэффициента и порогового значения модели вычисления состояния загрязнения около подвагонного компонента на основе глубокой GRU-сети, инициализируют рои летучих мышей и задают параметры роев летучих мышей;
при этом размер роя летучих мышей составляет в диапазоне [300, 600], максимальная частота r0 импульсов отдельной летучей мыши составляет в диапазоне [0,3, 0,6], максимальная интенсивность A0 импульсного звука составляет в диапазоне [0,3, 0,6], максимальное число итераций составляет в диапазоне [200, 500], точность поиска составляет в диапазоне [0,002, 0,2], частота импульсов составляет в диапазоне [0, 1,8], увеличенный коэффициент частоты поиска летучих мышей составляет в диапазоне [0,04, 0,1], коэффициент ослабления интенсивности звука составляет в диапазоне [0,75, 0,1], максимальное число итераций составляет в диапазоне [200, 800], и максимальная точность поиска составляет в диапазоне [0,02, 0,15];
этап B2: задают функцию пригодности и определяют положение начальной оптимальной отдельной летучей мыши и число t итераций, t=1;
подставляют весовой коэффициент и пороговое значение, соответствующие положению отдельной летучей мыши, в модель вычисления состояния загрязнения около подвагонного компонента на основе глубокой GRU-сети, получают результат регистрации путем использования модели вычисления состояния загрязнения около подвагонного компонента на основе глубокой GRU-сети, определенной по положению отдельной летучей мыши, и конструируют первую функцию f1(E) пригодности по разности E между результатом регистрации и фактической ситуацией, f1(E)=1/(E+1);
вычисляют пригодность положения каждой отдельной летучей мыши путем использования первой функции пригодности и используют положение отдельной летучей мыши, соответствующее максимальной пригодности, в качестве положения начальной оптимальной отдельной летучей мыши;
этап B3: обновляют скорость и положение отдельной летучей мыши путем использования заданной частоты импульсов;
этап B4: если Rand1>ri, случайным образом возмущают летучую мышь в оптимальном положении отдельной мыши, формируя возмущенное положение отдельной летучей мыши;
при этом Rand1 является случайным числом, равномерно распределенным на [0, 1], и ri является частотой импульсов i-ой летучей мыши;
этап B5: если Rand2>Ai, и пригодность возмущенного положения отдельной летучей мыши превосходит пригодность положения отдельной летучей мыши перед возмущением, перемещают отдельную летучую мышь в возмущенное положение, либо, в противном случае, поддерживают отдельную летучую мышь в первоначальном положении;
при этом Rand2 является случайным числом, равномерно распределенным на [0, 1], и Ai является интенсивностью звука i-ой летучей мыши;
этап B6: если условие этапа B5 удовлетворяется, обновляют частоту импульсов и интенсивность импульсного звука отдельной летучей мыши путем использования увеличенного коэффициента частоты поиска летучих мышей и коэффициента ослабления интенсивности звука и переходят к этапу B4, либо, в противном случае, переходят к этапу B7;
этап B7: вычисляют пригодность положения каждой отдельной летучей мыши в текущем рое летучих мышей и выполняют хаотическую оптимизацию положения и скорости для первых m% отдельных летучих мышей в порядке убывания для получения обновленных первых m% отдельных летучих мышей, при этом m составляет в диапазоне [4, 25]; и
этап B8: определяют, достигается ли максимальное число итераций или максимальная точность поиска; если оно(а) достигается, выбирают глобальную оптимальную отдельную летучую мышь из обновленных первых m% отдельных летучих мышей согласно значению пригодности и выдают оптимальный весовой коэффициент и пороговое значение модели вычисления состояния загрязнения около подвагонного компонента на основе глубокой GRU-сети, соответствующие глобальной оптимальной отдельной летучей мыши; в противном случае, допускают t=t+1 и выполняют этап B3, продолжая следующую итерацию.
7. Система для защиты работы поезда в загрязняющей воздушной среде, содержащая:
модуль (1) регистрации качества воздуха на крыше, выполненный с возможностью получать данные регистрации качества воздуха на крыше;
модуль (2) регистрации качества воздуха в подвагонной части, выполненный с возможностью получать данные регистрации качества воздуха в подвагонной части;
модуль (3) передачи данных, выполненный с возможностью передавать полученные данные регистрации качества воздуха на крыше и данные регистрации качества воздуха под вагоном в модуль (4) обработки данных;
модуль (4) обработки данных, выполненный с возможностью моделирования и вычисления уровней загрязнения; при этом:
процесс моделирования содержит:
вычисление средней концентрации каждого загрязняющего вещества на крыше поезда в течение времени работы со времени отбытия от станции отправления до текущего времени путем использования данных регистрации качества воздуха на крыше и вычисление средней концентрации каждого загрязняющего вещества в подвагонной части поезда в течение времени работы со времени отбытия от станции отправления до текущего времени путем использования данных регистрации качества воздуха в подвагонной части;
расчет показателя Q0 всесторонней оценки качества воздуха на крыше путем использования данных регистрации качества воздуха на крыше и расчет показателя Q1 всесторонней оценки качества воздуха под вагоном путем использования данных регистрации качества воздуха в подвагонной части;
вычисление времени T0 воздействия на компоненты крыши при условии Q0≥Q и вычисление времени T1 воздействия на подвагонные компоненты при условии Q1≥Q; при этом Q является заданным безопасным значением показателя всесторонней оценки качества воздуха;
обучение модели вычисления состояния загрязнения около компонента крыши согласно следующему процессу:
моделирование работы поезда путем использования вычисленной средней концентрации каждого загрязняющего вещества на крыше поезда в течение времени работы со времени отбытия от станции отправления до текущего времени и соответствующего рассчитанного T0 в качестве экспериментальных условий моделирования для получения уровня G0 загрязнения компонентов крыши при различных экспериментальных условиях моделирования, при этом степень загрязнения компонентов крыши классифицируется в качестве G-уровней; и
обучение модели вычисления состояния загрязнения около компонента крыши путем использования вычисленной средней концентрации каждого загрязняющего вещества на крыше поезда в течение времени работы со времени отбытия от станции отправления до текущего времени и соответствующего рассчитанного T0 в качестве ввода и использование G0 в качестве вывода с получением обученной модели вычисления состояния загрязнения около компонента крыши;
обучение модели вычисления состояния загрязнения около подвагонного компонента согласно следующему процессу:
моделирование работы поезда путем использования вычисленной средней концентрации каждого загрязняющего вещества в подвагонной части поезда в течение времени работы со времени отбытия от станции отправления до текущего времени и соответствующего рассчитанного T1 в качестве экспериментальных условий моделирования для получения уровня G1 загрязнения подвагонных компонентов при различных экспериментальных условиях моделирования, при этом степень загрязнения подвагонных компонентов классифицируется в качестве G-уровней; и
обучение модели вычисления состояния загрязнения около подвагонного компонента путем использования вычисленной средней концентрации каждого загрязняющего вещества в подвагонной части поезда в течение времени работы со времени отбытия от станции отправления до текущего времени и соответствующего рассчитанного T1 в качестве ввода и использование G1 в качестве вывода с получением обученной модели вычисления состояния загрязнения около подвагонного компонента;
процесс вычисления уровней загрязнения содержит:
получение после остановки поезда данных регистрации качества воздуха на крыше и данных регистрации качества воздуха в подвагонной части;
путем использования данных регистрации качества воздуха на крыше расчет средней концентрации каждого загрязняющего вещества на крыше поезда в течение времени работы со времени отбытия от станции отправления до текущего времени, показателя Q0 всесторонней оценки качества воздуха на крыше и времени T0 воздействия на компоненты крыши при условии Q0≥Q; и привлечение обученной модели вычисления состояния загрязнения около компонента крыши при условии Q0≥Q для расчета уровня загрязнения компонентов крыши;
путем использования данных регистрации качества воздуха под вагоном по этапу 5 расчет средней концентрации каждого загрязняющего вещества в подвагонной части поезда в течение времени работы со времени отбытия от станции отправления до текущего времени, показателя Q1 всесторонней оценки качества воздуха под вагоном и времени T1 воздействия на подвагонные компоненты при условии Q1≥Q; и привлечение обученной модели вычисления состояния загрязнения около подвагонного компонента при условии Q1≥Q для расчета уровня загрязнения подвагонных компонентов;
отправку уровня загрязнения компонентов крыши и уровня загрязнения подвагонных компонентов в платформенный центр (5) обработки и хранения данных;
платформенный центр (5) обработки и хранения данных, выполненный с возможностью принимать уровень загрязнения компонентов крыши и уровень загрязнения подвагонных компонентов, отправленные модулем (4) обработки данных, и отправлять инструкции защиты в платформенный исполнительный модуль (6) согласно принимаемым уровню загрязнения компонентов крыши и уровню загрязнения подвагонных компонентов; и
платформенный исполнительный модуль (6), предназначенный выполнять соответствующую очистку компонентов крыши и/или подвагонных компонентов согласно инструкциям защиты, отправленным платформенным центром (5) обработки и хранения данных.
8. Система для защиты работы поезда в загрязняющей воздушной среде по п. 7, в которой как модуль (1) регистрации качества воздуха на крыше, так и модуль (2) регистрации качества воздуха под вагоном содержат одно или более из датчика концентрации CO2, датчика концентрации NO2, датчика концентрации SO2, датчика концентрации PM2,5, датчика концентрации VOC и датчика концентрации пыли.
9. Система для защиты работы поезда в загрязняющей воздушной среде по п. 7, в которой модуль (1) регистрации качества воздуха на крыше содержит одно или более устройств (101) регистрации качества воздуха на крыше, и устройство (101) регистрации качества воздуха на крыше размещается в головной части, средней части и хвостовой части каждого отсека, соответственно;
модуль (2) регистрации качества воздуха под вагоном содержит одно или более устройств (201) регистрации качества воздуха в подвагонной части, и устройство (201) регистрации качества воздуха под вагоном размещается в головной части, средней части и хвостовой части каждого отсека, соответственно; и
каждые три отсека совместно используют модуль (4) обработки данных.
10. Система для защиты работы поезда в загрязняющей воздушной среде по п. 7, в которой платформенный исполнительный модуль (6) содержит беспилотную станцию (601) на платформе и терминал (602) для человеко-машинного взаимодействия, при этом как беспилотная станция (601) на платформе, так и терминал (602) для человеко-машинного взаимодействия соединены с платформенным центром (5) обработки и хранения данных; беспилотная станция на платформе содержит один или более беспилотных аппаратов (6011), и каждый беспилотный аппарат (6011) снабжен устройством распыления и очистки и осветительным оборудованием, и терминал (602) для человеко-машинного взаимодействия содержит компьютер (6021) для приема инструкций.
11. Способ определения уровня загрязнения компонентов крыши и уровня загрязнения подвагонных компонентов около поезда в загрязняющей воздушной среде, при этом способ содержит следующие этапы:
этап 1, собирают несколько групп данных регистрации качества воздуха на крыше и данных регистрации качества воздуха под вагоном и вычисляют среднюю концентрацию каждого загрязняющего вещества на крыше и под вагоном поезда в течение времени работы со времени отбытия от станции отправления до текущего времени;
этап 2, рассчитывают показатель Q0 всесторонней оценки качества воздуха на крыше путем использования данных регистрации качества воздуха на крыше по этапу 1 и рассчитывают показатель Q1 всесторонней оценки качества воздуха под вагоном путем использования данных регистрации качества воздуха под вагоном на этапе 1;
этап 3, вычисляют время T0 воздействия на компоненты крыши при условии Q0≥Q и вычисляют время T1 воздействия на подвагонные компоненты при условии Q1≥Q; при этом Q является заданным безопасным значением показателя всесторонней оценки качества воздуха;
этап 4,
обучают модель вычисления состояния загрязнения около компонента крыши согласно следующему способу:
моделируют работу поезда путем использования вычисленной на этапе 1 средней концентрации каждого загрязняющего вещества на крыше поезда в течение времени работы со времени отбытия от станции отправления до текущего времени и соответствующего T0, рассчитанного на этапе 3, в качестве экспериментальных условий моделирования для получения уровня G0 загрязнения компонентов крыши при различных экспериментальных условиях моделирования, при этом степень загрязнения компонентов крыши классифицируется в качестве G-уровней; и
обучают модель вычисления состояния загрязнения около компонента крыши путем использования вычисленной на этапе 1 средней концентрации каждого загрязняющего вещества на крыше поезда в течение времени работы со времени отбытия от станции отправления до текущего времени и соответствующего T0, рассчитанного на этапе 3, в качестве ввода и используют G0 в качестве вывода с получением обученной модели вычисления состояния загрязнения около компонента крыши;
обучают модель вычисления состояния загрязнения около подвагонного компонента согласно следующему способу:
моделируют работу поезда путем использования вычисленной на этапе 1 средней концентрации каждого загрязняющего вещества в подвагонной части поезда в течение времени работы со времени отбытия от станции отправления до текущего времени и соответствующего T1, рассчитанного на этапе 3, в качестве экспериментальных условий моделирования для получения уровня G1 загрязнения подвагонных компонентов при различных экспериментальных условиях моделирования, при этом степень загрязнения подвагонных компонентов классифицируется в качестве G-уровней;
обучают модель вычисления состояния загрязнения около подвагонного компонента путем использования вычисленной на этапе 1 средней концентрации каждого загрязняющего вещества в подвагонной части поезда в течение времени работы со времени отбытия от станции отправления до текущего времени и соответствующего T1, рассчитанного на этапе 3, в качестве ввода и используют G1 в качестве вывода с получением обученной модели вычисления состояния загрязнения около подвагонного компонента;
этап 5, получают после остановки поезда данные регистрации качества воздуха на крыше и данные регистрации качества воздуха в подвагонной части;
этап 6,
путем использования данных регистрации качества воздуха на крыше по этапу 5 рассчитывают среднюю концентрацию каждого загрязняющего вещества на крыше поезда в течение времени работы со времени отбытия от станции отправления до текущего времени, показатель Q0 всесторонней оценки качества воздуха на крыше и время T0 воздействия на компоненты крыши при условии Q0≥Q; и вызывают обученную модель вычисления состояния загрязнения около компонента крыши при условии Q0≥Q для расчета уровня загрязнения компонентов крыши; и
путем использования данных регистрации качества воздуха под вагоном по этапу 5 рассчитывают среднюю концентрацию каждого загрязняющего вещества в подвагонной части поезда в течение времени работы со времени отбытия от станции отправления до текущего времени, показатель Q1 всесторонней оценки качества воздуха под вагоном и время T1 воздействия на подвагонные компоненты при условии Q1≥Q; и вызывают обученную модель вычисления состояния загрязнения около подвагонного компонента при условии Q1≥Q для расчета уровня загрязнения подвагонных компонентов.
| CN 106129889 A, 16.11.2016 | |||
| CN 106960285 A, 18.07.2017 | |||
| CN 202471872 U, 03.10.2012 | |||
| CN 204228897 U, 25.03.2015 | |||
| Устройство для контроля за состоянием изоляторов воздушных линий электропередачи | 1990 |
|
SU1795383A1 |
| Антенное устройство для дальновидения | 1940 |
|
SU63467A3 |

