Область техники
[0001] Настоящее изобретение относится к способу отображения окружающей обстановки и устройству отображения окружающей обстановки для обнаружения обстановки вокруг рассматриваемого транспортного средства и отображения обнаруженной обстановки.
УРОВЕНЬ ТЕХНИКИ
[0002] В качестве метода уведомления находящегося в транспортном средстве лица об изменении режима во время движения при автономном вождении известен, например, метод, раскрытый в патентной ссылке 1. В патентной ссылке 1 вычисляют время, требуемое до изменения управления движением при автономном вождении, и отображают его на экране в виде числового значения, чтобы уведомить находящееся в транспортном средстве лицо о времени изменения.
СПИСОК ЦИТИРУЕМОЙ ЛИТЕРАТУРЫ
ПАТЕНТНАЯ ЛИТЕРАТУРА
[0003] Патентная ссылка 1: публикация заявки на патент Японии № 2016-130971.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0004] В патентной ссылке 1, в которой тот момент времени, когда управление движением при автономном вождении изменяется, отображают в виде числового значения, если находящееся в транспортном средстве лицо смотрит на отображаемое числовое значение и ведет обратный отсчет со своим собственным ощущением времени, может возникнуть разрыв между обратным отсчетом находящегося в транспортном средстве лица и отображаемым на экране обратным отсчетом. Следовательно, вполне возможно, что находящееся в транспортном средстве лицо может неправильно распознать тот момент времени, когда действие транспортного средства изменится.
[0005] Настоящее изобретение было создано для решения такой традиционной проблемы, и его задача состоит в том, чтобы предоставить способ отображения окружающей обстановки и устройство отображения окружающей обстановки, позволяющие надлежащим образом уведомлять находящееся в транспортном средстве лицо о времени изменения действия при автономном вождении.
[0006] В одном аспекте настоящего изобретения момент времени, когда действие рассматриваемого транспортного средства изменяется функцией автономного вождения, отображают на изменяющейся индикаторной шкале, которая имеет заданную индикаторную рамку и отображает позицию индикации внутри индикаторной рамки со сдвигом позиции индикации.
ПРЕИМУЩЕСТВЕННЫЕ ЭФФЕКТЫ ИЗОБРЕТЕНИЯ
[0007] Согласно аспекту настоящего изобретения можно надлежащим образом уведомлять находящееся в транспортном средстве лицо о времени изменения действия при автономном вождении.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0008] Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию устройства отображения в соответствии с вариантом осуществления настоящего изобретения.
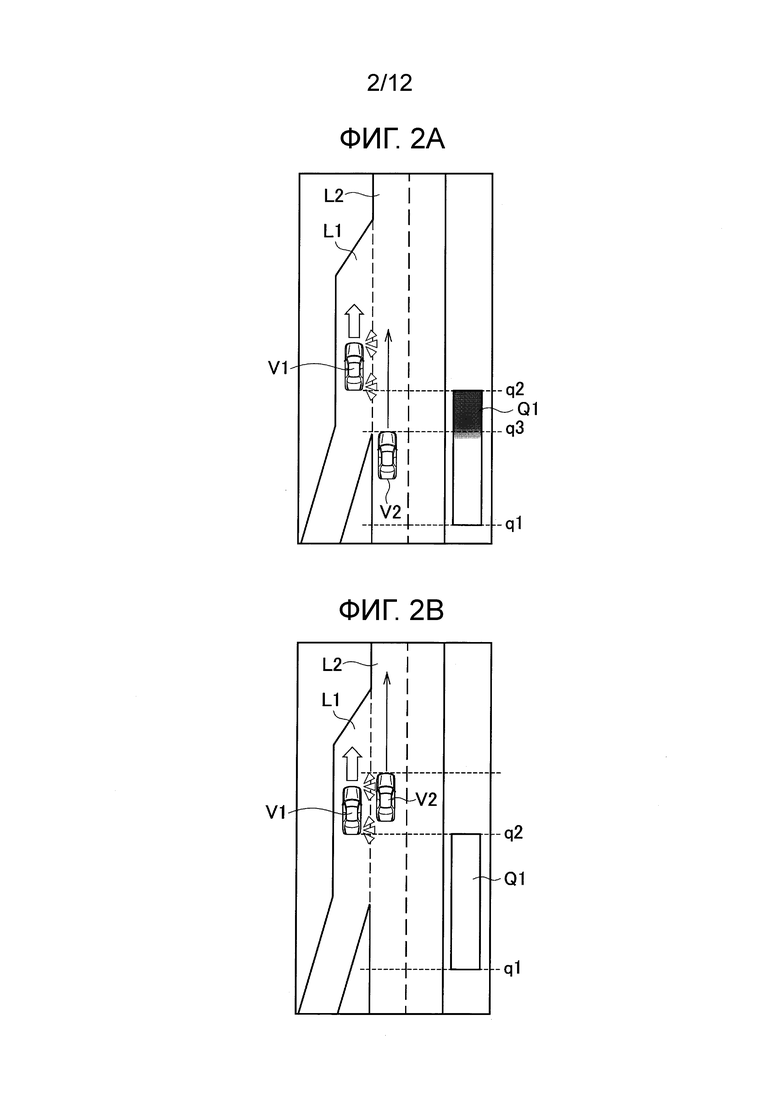
На фиг. 2А представлен первый пример отображения, иллюстрирующий ситуацию, в которой рассматриваемое транспортное средство должно перейти из полосы разгона на автомагистрали в полосу движения с вхождением в пространство позади другого транспортного средства.
На фиг. 2B представлен второй пример отображения, иллюстрирующий ситуацию, в которой рассматриваемое транспортное средство должно перейти из полосы разгона на автомагистрали в полосу движения с вхождением в пространство позади другого транспортного средства.
На фиг. 3A представлен первый пример отображения, иллюстрирующий ситуацию, в которой рассматриваемое транспортное средство должно перейти из полосы разгона на автомагистрали в полосу движения с вхождением в пространство перед другим транспортным средством.
На фиг. 3B представлен второй пример отображения, иллюстрирующий ситуацию, в которой рассматриваемое транспортное средство должно перейти из полосы разгона на автомагистрали в полосу движения с вхождением в пространство перед другим транспортным средством.
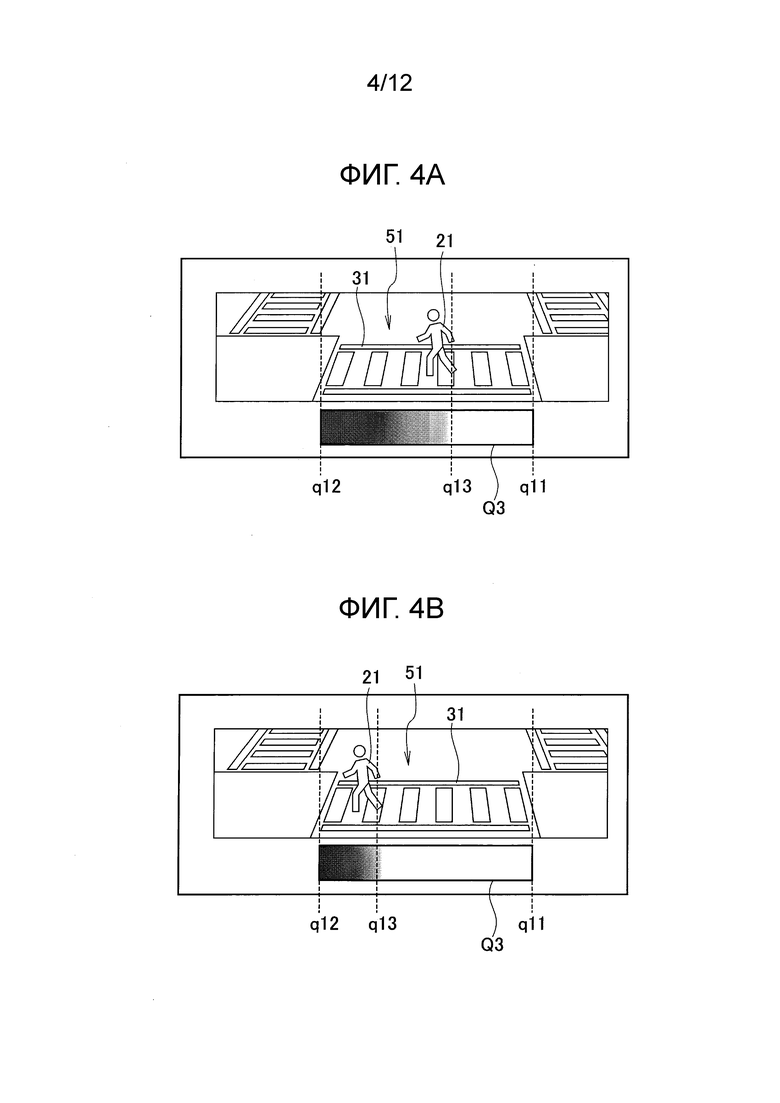
На фиг. 4A представлен первый пример отображения ситуации, в которой рассматриваемое транспортное средство ожидает, пока пешеход завершит переход по пешеходному переходу.
На фиг. 4B представлен второй пример отображения ситуации, в которой рассматриваемое транспортное средство ожидает, пока пешеход завершит переход по пешеходному переходу.
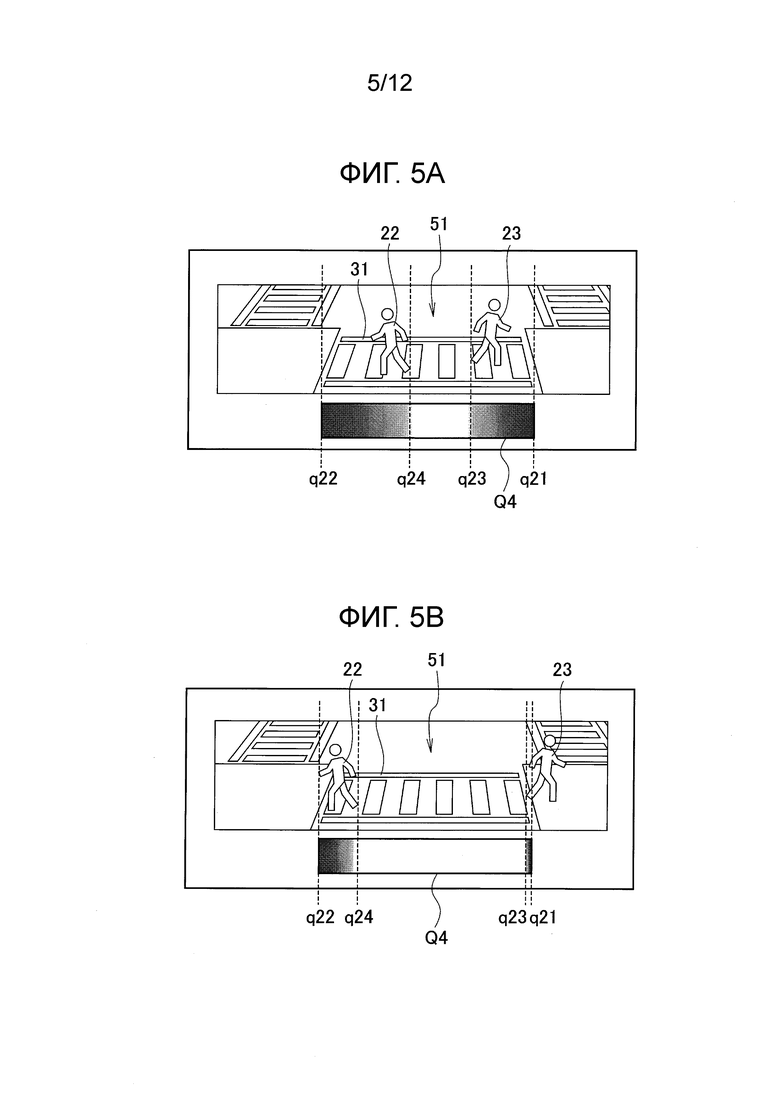
На фиг. 5A представлен первый пример отображения ситуации, в которой рассматриваемое транспортное средство ожидает, пока два пешехода завершат переход по пешеходному переходу.
На фиг. 5B представлен второй пример отображения ситуации, в которой рассматриваемое транспортное средство ожидает, пока два пешехода завершат переход по пешеходному переходу.
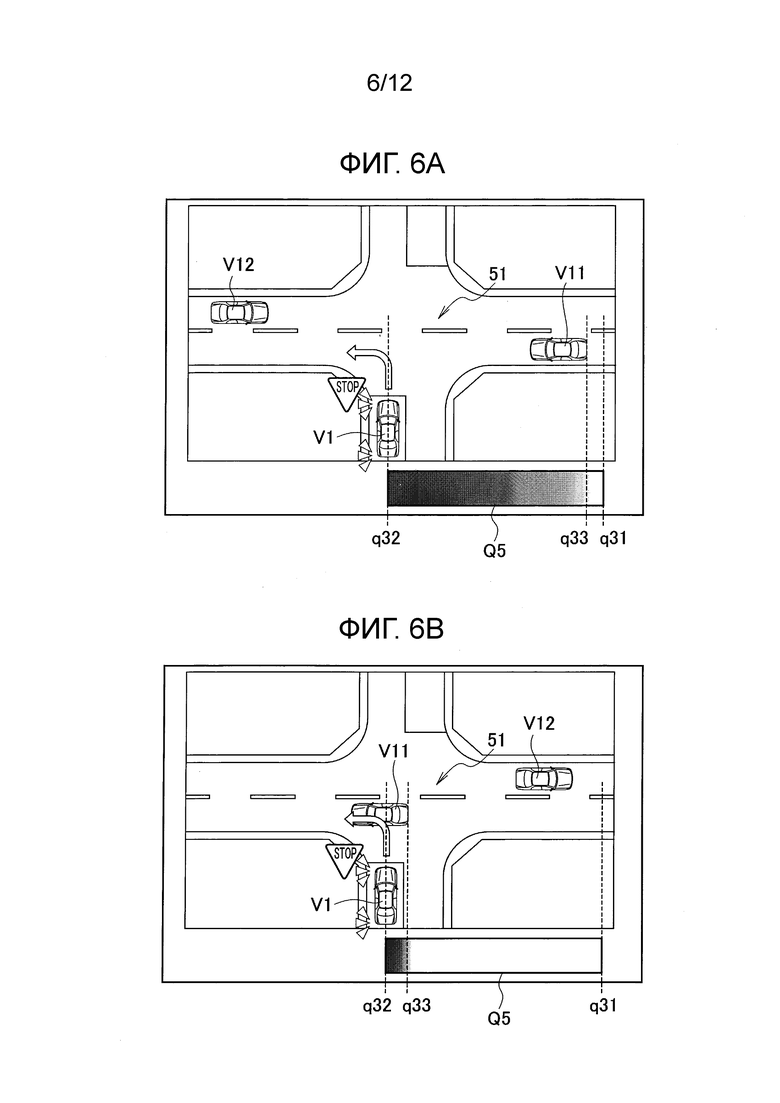
На фиг. 6A представлен первый пример отображения ситуации, в которой рассматриваемое транспортное средство ожидает проезда другого транспортного средства, приближающегося справа, при попытке повернуть налево на перекрестке.
На фиг. 6B представлен второй пример отображения ситуации, в которой рассматриваемое транспортное средство ожидает проезда другого транспортного средства, приближающегося справа, при попытке повернуть налево на перекрестке.
На фиг. 7A представлен первый пример отображения ситуации, в которой рассматриваемое транспортное средство ожидает проезда других транспортных средств, приближающихся справа и слева, при попытке повернуть направо на перекрестке.
На фиг. 7B представлен второй пример отображения ситуации, в которой рассматриваемое транспортное средство ожидает проезда других транспортных средств, приближающихся справа и слева, при попытке повернуть направо на перекрестке.
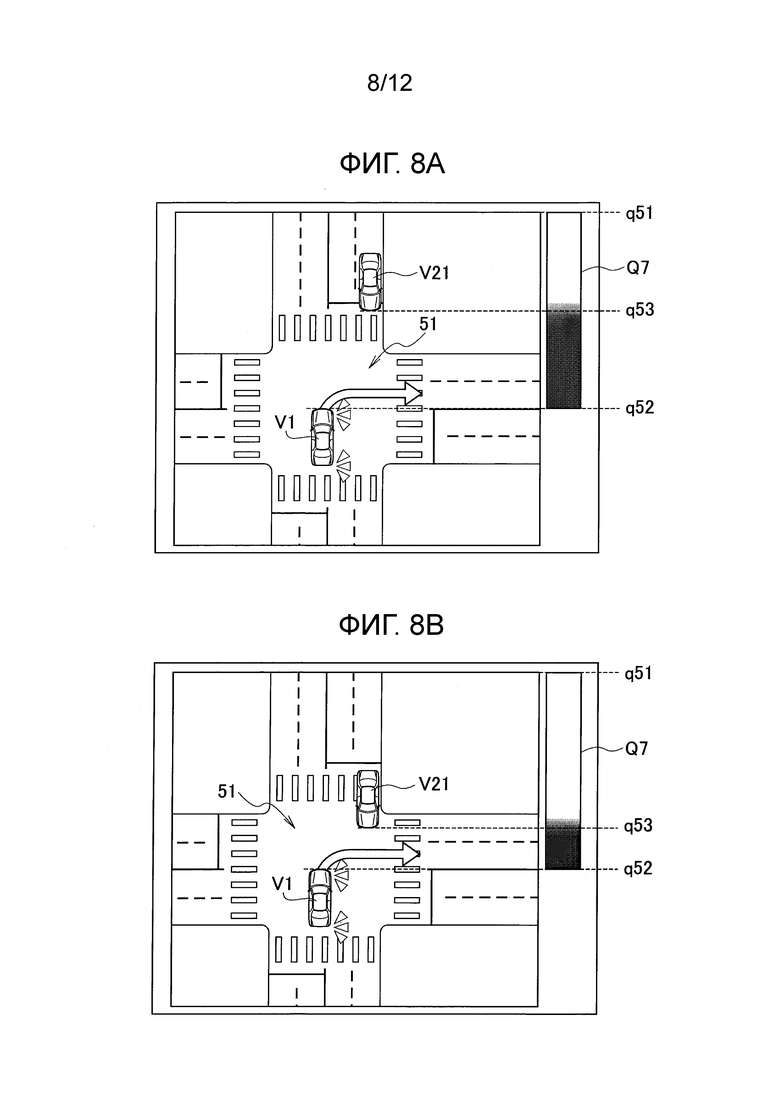
На фиг. 8A представлен первый пример отображения ситуации, в которой рассматриваемое транспортное средство ожидает проезда встречного транспортного средства при попытке повернуть направо на перекрестке.
На фиг. 8B представлен второй пример отображения ситуации, в которой рассматриваемое транспортное средство ожидает проезда встречного транспортного средства при попытке повернуть направо на перекрестке.
На фиг. 8C представлен третий пример отображения ситуации, в которой рассматриваемое транспортное средство ожидает проезда встречного транспортного средства при попытке повернуть направо на перекрестке.
Фиг. 9 - пояснительная диаграмма, иллюстрирующая сегментный индикатор.
Фиг. 10A - первая часть блок-схемы, иллюстрирующей последовательность операций процесса в устройстве отображения в соответствии с вариантом осуществления.
Фиг. 10B - вторая часть блок-схемы, иллюстрирующей последовательность операций процесса в устройстве отображения в соответствии с вариантом осуществления.
Фиг. 10C - третья часть блок-схемы, иллюстрирующей последовательность операций процесса в устройстве отображения в соответствии с вариантом осуществления.
Описание вариантов осуществления
[0009] Варианты осуществления настоящего изобретения будут описаны ниже со ссылкой на чертежи.
Описание конфигурации в варианте осуществления
На фиг. 1 показана блок-схема, иллюстрирующая конфигурацию устройства отображения в соответствии с одним вариантом осуществления настоящего изобретения. Это устройство отображения установлено на транспортном средстве, имеющем функцию автономного вождения. Следует отметить, что автономное вождение в этом варианте осуществления относится к состоянию управления, например, по меньшей мере акселератором среди таких исполнительных механизмов, как тормоз, акселератор и рулевое управление, без действия водителя. Таким образом, другие исполнительные механизмы могут приводиться в действие операцией водителя.
[0010] Как показано на фиг. 1, устройство отображения включает в себя контроллер 1 дисплея, отображающий изображение дисплей 2, базу 3 данных карт, устройство 4 GPS (системы глобального позиционирования), лазерный дальномер (ЛДМ) 5, камеры 6, датчик 7 угла поворота руля и датчик 8 скорости транспортного средства.
[0011] Контроллер 1 дисплея включает в себя контур 11 распознавания сцен, контур 12 установки конечных точек, контур 13 обнаружения положения препятствий, контур 14 отображения изменяющейся индикаторной шкалы, контур 15 отображения человеко-машинного интерфейса (ЧМИ) и контур 16 объединения изображений.
[0012] Устройство 4 GPS обнаруживает текущее положение транспортного средства и выводит информацию об обнаруженном положении в контур 11 распознавания сцен. База 3 данных карт хранит данные трехмерной карты, охватывающие область вокруг транспортного средства. Данные карты выводятся в контур 11 распознавания сцен.
[0013] ЛДМ 5 излучает луч инфракрасного лазера на целевой объект и измеряет расстояние до целевого объекта на основании интенсивности отраженного луча. Посредством измерения с помощью ЛДМ 5 может быть получено расстояние до целевого объекта в качестве информации облака точек, и эта информация облака точек выводится в контур 11 распознавания сцен. Между тем, вместо ЛДМ 5 для обнаружения целевого объекта могут быть применены парктроник, использующий ультразвуковые волны, радар миллиметрового диапазона, камера, связь между дорогой и транспортными средствами, так называемая связь «дорога - автомобили» (от англ. «road-to-vehicle communication»), связь между транспортными средствами (от англ. «vehicle-to-vehicle communication») и т.п. Выходные данные ЛДМ 5 выводятся в контур 13 обнаружения положения препятствий.
[0014] Камеры 6 включают в себя переднюю камеру 6a, заднюю камеру 6b, правую камеру 6c и левую камеру 6d и снимают изображения с передней, задней, правой и левой сторон вокруг транспортного средства. Каждая камера 6 (6a-6d) является камерой, включающей в себя захватывающий изображения элемент, такой как ПЗС- или КМОП-матрица. Камера 6 выводит данные снятого изображения в контур 13 обнаружения положения препятствий.
[0015] Датчик 7 угла поворота руля обнаруживает угол поворота руля транспортного средства и выводит обнаруженный угол поворота руля в контур 11 распознавания сцен. Кроме того, датчик 8 скорости транспортного средства обнаруживает скорость транспортного средства по числу оборотов колеса и выводит обнаруженную скорость в контур 11 распознавания сцен.
[0016] В качестве дисплея 2 можно использовать монитор изображения, такой как жидкокристаллический дисплей. Кроме того, также доступны различные средства отображения, такие как сегментный индикатор, показанный на фиг. 9, снабженный множеством светодиодов 61, и дисплей на лобовом стекле.
[0017] Контур 11 распознавания сцен выявляет ситуации, при которых действие транспортного средства, движущегося при автономном вождении, должно измениться. «Изменение действия» относится к такому действию, как движение от остановки, ускорение, замедление, поворот направо, поворот налево или поворот рулевого колеса (для вхождения на высокой скорости). Примеры конкретных ситуаций, в которых изменения действия включают в себя такие режимы, как въезд на автомагистраль, смена полосы, ожидание пешехода на пешеходном переходе, поворот направо или налево на перекрестке и движение после пропускания встречного транспортного средства. Контур 11 распознавания сцен выявляет (идентифицирует) каждое из вышеуказанных изменений действия на основании данных трехмерной карты, данных текущего местоположения транспортного средства, данных угла поворота руля и данных скорости транспортного средства. Контур 11 распознавания сцен выводит режим изменения действия в контур 12 установки конечных точек.
[0018] Контур 13 обнаружения положения препятствий обнаруживает положения препятствий, таких как другие транспортные средства, пешеходы и животные, присутствующие вокруг рассматриваемого транспортного средства, на основании обнаруженных данных ЛДМ 5 и изображений, снятых камерами 6 (6a-6d). Например, контур 13 обнаружения положения препятствий обнаруживает другие транспортные средства, приближающиеся справа или слева, в то время как рассматриваемое транспортное средство останавливается на перекрестке. Контур 13 обнаружения положения препятствий также обнаруживает встречные транспортные средства, движущиеся спереди. Кроме того, контур 13 обнаружения положения препятствий обнаруживает такие препятствия, как пешеходы и животные, идущие вокруг транспортного средства. Контур 13 обнаружения положения препятствий выводит информацию о положении каждого обнаруженного препятствия в контур 12 установки конечных точек и контур 14 отображения изменяющейся индикаторной шкалы.
[0019] В ситуации, когда действие движущегося при автономном вождении транспортного средства должно измениться, отображают изображение транспортного средства и его окрестностей, т.е. окружения (вид с высоты птичьего полета). При отображении этого изображения окружения, контур 12 установки конечных точек устанавливает две конечные точки в качестве начальной точки и оконечной точки изменяющейся индикаторной шкалы, отображаемой на изображении окружения.
[0020] Контур 14 отображения изменяющейся индикаторной шкалы изображает изменяющуюся индикаторную шкалу на этом изображении на основании конечных точек, установленных контуром 12 установки конечных точек, взаимного пространственного расположения транспортного средства и препятствия и их относительной скорости. Как указано ссылочной позицией Q3 на фиг. 4A, например, изменяющаяся индикаторная шкала имеет прямоугольную форму, удлиненную в определенном направлении (горизонтальном направлении на фиг. 4A), и отображает момент времени, когда изменяется действие управляемого при автономном вождении транспортного средства, путем смещения точки индикации (позиции индикации). В частности, изменяющаяся индикаторная шкала имеет функцию отображения момента времени, когда изменяется действие рассматриваемого транспортного средства, синхронно с ситуацией вокруг рассматриваемого транспортного средства.
[0021] Контур 14 отображения изменяющейся индикаторной шкалы изображает изменяющуюся индикаторную шкалу в изображении окружения на основании этого изображения окружения, текущего положения рассматриваемого транспортного средства и положения препятствия. В этом варианте осуществления контур 14 отображения изменяющейся индикаторной шкалы указывает точку индикации в виде цветной области во всей области отображаемой рамки. Например, контур 14 отображения изменяющейся индикаторной шкалы сдвигает отображаемую красным цветом область во всей отображаемой рамке для отображения того момента времени, когда рассматриваемое транспортное средство меняет свое действие.
[0022] Контур 15 отображения ЧМИ генерирует различные изображения, указывающие информацию об автономном вождении во время движения с автономным вождением, и выводит их в контур 16 объединения изображений.
[0023] Контур 16 объединения изображений объединяет относящиеся к автономному вождению изображения, заданные контуром 15 отображения ЧМИ, с изображением окружения с изображенной в нем изменяющейся индикаторной шкалой и отображает объединенное (комбинированное) изображение на дисплее 2.
[0024] Следует отметить, что вышеописанный контроллер 1 дисплея может быть реализован с использованием микрокомпьютера, включающего в себя центральный процессор (ЦП), память и блок ввода-вывода. В микрокомпьютер устанавливается и в нем исполняется компьютерная программа (программа отображения) для обеспечения функционирования микрокомпьютера в качестве контроллера 1 дисплея. Таким образом, микрокомпьютер функционирует как множество входящих в состав контроллера 1 дисплея контуров обработки информации (11-16). Следует отметить, что хотя здесь обсуждается случай реализации контроллера 1 дисплея с программным обеспечением, возможно, конечно, сконфигурировать контроллер 1 дисплея посредством подготовки специально предназначенного для этого аппаратного обеспечения. Кроме того, множество контуров, входящих в состав контроллера 1 дисплея, могут быть выполнены с использованием отдельных частей аппаратного обеспечения. Кроме того, в качестве контроллера 1 дисплея может также использоваться электронный блок управления (ЭБУ), используемый для других процессов управления транспортным средством. Кроме того, помимо ЛДМ 5, камер 6 и дисплея 2, показанные на фиг. 1 компоненты не должны быть установлены на транспортном средстве, и различные элементы данных могут быть получены посредством связи с базовыми станциями.
Примеры отображения изменяющейся индикаторной шкалы
[0025] Далее будут описаны конкретные примеры отображения изменяющейся индикаторной шкалы, отображаемой на изображении окружения.
(1) Случай вхождения на полосу движения на автомагистрали
Фиг. 2А и 2В и фиг. 3A и 3B являются схемами, иллюстрирующими ситуации, когда рассматриваемое транспортное средство V1 должно перестроиться из полосы L1 разгона на полосу L2 движения на автомагистрали, в качестве тех ситуаций, когда действие рассматриваемого транспортного средства V1 должно измениться. Как показано на фиг. 2А и 3А, другое транспортное средство V2 движется позади рассматриваемого транспортного средства V1 в полосе L2 движения. При таком перестроении существует два случая, в одном из которых рассматриваемое транспортное средство V1 входит в пространство позади другого транспортного средства V2, а другой - в котором рассматриваемое транспортное средство V1 входит в пространство перед другим транспортным средством V2. Фиг. 2А и 2В иллюстрируют случай входа в заднее пространство, тогда как фиг. 3А и 3В иллюстрируют случай входа в переднее пространство. Входить ли в переднее пространство или в заднее пространство, определяют на основании относительной скорости рассматриваемого транспортного средства V1 и другого транспортного средства V2.
[0026] Как показано на фиг. 2A и 2B, в случае вхождения в пространство позади другого транспортного средства V2, изменяющаяся индикаторная шкала Q1 отображается на изображении окружения (окрестностей) рассматриваемого транспортного средства V1 с одной конечной точкой q1 изменяющейся индикаторной шкалы, установленной в положении позади заднего конца рассматриваемого транспортного средства V1, отделенном заданным расстоянием, и другой конечной точкой q2, установленной в положении заднего конца рассматриваемого транспортного средства V1. При этом позиция отображения - это позиция, не перекрывающая дороги движения на этом изображении и ориентированная в направлении, параллельном направлению продвижения рассматриваемого транспортного средства V1. Следует отметить, что расстояние до конечной точки q1 устанавливается на любое подходящее расстояние от рассматриваемого транспортного средства V1.
[0027] На изменяющейся индикаторной шкале Q1 точка q3 индикации устанавливается в положении переднего конца другого транспортного средства V2, и область от конечной точки q2, служащей в качестве исходной точки, до точки q3 индикации окрашивается. При этом область вокруг точки q3 индикации отображается с градацией. Окрашенная (цветная) область, отображаемая на изменяющейся индикаторной шкале Q1, указывает относительное расстояние между рассматриваемым транспортным средством V1 и другим транспортным средством V2. Как показано на фиг. 2B, когда другое транспортное средство V2 приближается к рассматриваемому транспортному средству V1, точка q3 индикации приближается к конечной точке q2, так что цветная область сужается. Когда цветная область на изменяющейся индикаторной шкале Q1 исчезает, как показано на фиг. 2B, находящееся в рассматриваемом транспортном средстве V1 лицо может распознавать момент времени, когда другое транспортное средство V2 проезжает мимо рассматриваемого транспортного средства V1. Таким образом, находящееся в транспортном средстве лицо может интуитивно распознавать момент времени, когда рассматриваемое транспортное средство V1 выполняет смену полосы на полосу L2 движения (момент времени, когда действие рассматриваемого транспортного средства V1 изменяется), и, следовательно, быть готовым к событию, при котором рассматриваемое транспортное средство V1 выполняет действие по вхождению в полосу L2 движения из полосы L1 разгона.
[0028] Следует отметить, что конечная точка q2 изменяющейся индикаторной шкалы Q1 перемещается в пределах изображения с движением рассматриваемого транспортного средства V1. В примере на фиг. 2A и 2B позиция отображения изменяющейся индикаторной шкалы Q1 перемещается так, что задний конец рассматриваемого транспортного средства V1 совмещен с конечной точкой q2.
[0029] С другой стороны, как показано на фиг. 3A и 3B, в том случае, когда рассматриваемое транспортное средство V1 должно войти в пространство перед другим транспортным средством V2, на изображении окрестностей рассматриваемого транспортного средства V1 отображается изменяющаяся индикаторная шкала Q2 с конечными точками q1 и q2. При этом точка q4 индикации указывает положение переднего конца другого транспортного средства V2, а область от конечной точки q1, служащей в качестве исходной точки, до точки q4 индикации окрашена. По конечной точке q1 в качестве исходной точки окрашенной (цветной) области находящееся в транспортном средстве лицо может распознать, что рассматриваемое транспортное средство V1 «вливается» в пространство перед другим транспортным средством V2. Кроме того, как показано на фиг. 3B, по мере того, как разделяющее транспортные средства расстояние между рассматриваемым транспортным средством V1 и другим транспортным средством V2 увеличивается, положение точки q4 индикации приближается к конечной точке q1, так что цветная область сужается. Глядя на сужающуюся цветную область, находящееся в транспортном средстве лицо может интуитивно распознавать момент времени, когда рассматриваемое транспортное средство V1 выполняет смену полосы на полосу L2 движения, и, следовательно, быть готовым к событию, при котором рассматриваемое транспортное средство V1 выполняет действие по вхождению в полосу L2 движения с полосы L1 разгона.
(2) Случай начала движения после ожидания перехода пешехода(ов) по пешеходному переходу на перекрестке
[0030] На фиг. 4А и 4В показаны схемы, иллюстрирующие ситуацию, когда рассматриваемое транспортное средство V1 остановилось на стоп-линии на перекрестке 51, а пешеход 21 идет по пешеходному переходу 31 впереди справа налево на этих схемах, в качестве ситуации, когда изменяется действие рассматриваемого транспортного средства V1.
[0031] В этом случае рассматриваемое транспортное средство V1 начинает движение, когда пешеход 21 заканчивает переход по пешеходному переходу 31. Как проиллюстрировано на фиг. 4А, отображается изменяющаяся индикаторная шкала Q3 с конечными точками q11 и q12, установленными на противоположных концах пешеходного перехода 31, на изображении с передней стороны от рассматриваемого транспортного средства V1. Изменяющаяся индикаторная шкала Q3 отображается параллельно пешеходному переходу 31.
[0032] Здесь область от конечной точки q12 на левой стороне пешеходного перехода 31 в качестве исходной точки до точки q13 индикации, указывающей положение пешехода 21, окрашена. Как показано на фиг. 4В, по мере того как пешеход 21 идет по пешеходному переходу 31, точка q13 индикации на изменяющейся индикаторной шкале Q3 перемещается справа налево, и рассматриваемое транспортное средство V1 начинает движение, когда пешеход 21 достигает конечной точки q12. В частности, расстояние от конечной точки q12 до точки q13 индикации, отображаемой на изменяющейся индикаторной шкале Q3, задается в соответствии с положением объекта внимания (цели внимания). По изменению цветовой области находящееся в транспортном средстве лицо может интуитивно распознавать момент времени, когда рассматриваемое транспортное средство V1 начинает движение (тот момент времени, когда изменяется действие рассматриваемого транспортного средства V1). Поэтому находящееся в транспортном средстве лицо может быть подготовлено к событию, при котором рассматриваемое транспортное средство V1 переключается с остановки на движение вперед.
[0033] Фиг. 5А и 5В - схемы, иллюстрирующие ситуацию, когда два пешехода 22 и 23 идут по пешеходному переходу 31 впереди в разных направлениях продвижения. В этом случае рассматриваемое транспортное средство V1 начинает движение, когда оба пешехода 22 и 23 заканчивают переход по пешеходному переходу 31. Как проиллюстрировано на фиг. 5А, отображается изменяющаяся индикаторная шкала Q4 с конечными точками q21 и q22, установленными на противоположных концах пешеходного перехода 31, на изображении с передней стороны от рассматриваемого транспортного средства V1. Изменяющаяся индикаторная шкала Q4 отображается параллельно пешеходному переходу 31.
[0034] Здесь область от конечной точки q22 на левой стороне пешеходного перехода 31 в качестве исходной точки до точки q24 индикации, указывающей положение пешехода 22, окрашена. Кроме того, окрашена область от конечной точки q21 на правой стороне в качестве исходной точки до точки q23 индикации, указывающей положение пешехода 23.
[0035] Как показано на фиг. 5В, по мере того как пешеходы 22 и 23 идут по пешеходному переходу 31, точка q24 индикации на изменяющейся индикаторной шкале Q4 перемещается справа налево, а точка q23 индикации на изменяющейся индикаторной шкале Q4 перемещается слева направо. Рассматриваемое транспортное средство V1 начинает движение, когда точка q24 индикации достигает конечной точки q22, а точка q23 индикации достигает конечной точки q21. По изменениям цветовых областей находящееся в транспортном средстве лицо может распознать момент времени, когда рассматриваемое транспортное средство V1 начинает движение. Поэтому находящееся в транспортном средстве лицо может быть подготовлено к событию, при котором рассматриваемое транспортное средство V1 переключается с остановки на движение вперед.
(3) Случай начала левого поворота на перекрестке после ожидания проезда проезжающего справа транспортного средства
[0036] На фиг. 6А и 6В показаны схемы, иллюстрирующие ситуацию, когда рассматриваемое транспортное средство V1 должно повернуть налево на перекрестке 51, в качестве ситуации, когда действие рассматриваемого транспортного средства V1 должно измениться. В этом случае рассматриваемое транспортное средство V1 начинает движение, когда другое транспортное средство V11, приближающееся к перекрестку 51 справа, заканчивает проезд перекрестка 51. Как проиллюстрировано на фиг. 6А, отображается изменяющаяся индикаторная шкала Q5 с одной конечной точкой q32, установленной в положении рассматриваемого транспортного средства V1 на изображении окружения, и другой конечной точкой q31, установленной в заданном положении с правой стороны. Изменяющаяся индикаторная шкала Q5 отображается параллельно направлению продвижения другого транспортного средства V11.
[0037] Здесь область на изменяющейся индикаторной шкале Q5 от конечной точки q32 в качестве исходной точки до точки q33 индикации, указывающей положение другого транспортного средства V11, окрашена. Как показано на фиг. 6B, по мере того как другое транспортное средство V11 приближается к перекрестку 51, точка q33 индикации на изменяющейся индикаторной шкале Q5 перемещается справа налево, и рассматриваемое транспортное средство V1 начинает движение, когда точка q33 индикации достигает конечной точки q32. По изменению окрашенной области находящееся в транспортном средстве лицо может распознать момент времени, когда рассматриваемое транспортное средство V1 начинает движение, и, следовательно, быть готовым к событию, при котором рассматриваемое транспортное средство V1 переключается с остановки на движение вперед. Следует отметить, что приближающиеся слева другое транспортное средство V12, показанное на фиг. 6А и 6В, не является препятствием для поворота влево рассматриваемого транспортного средства V1 и, следовательно, не распознается как объект внимания.
(4) Случай поворота вправо или движения прямо на перекрестке после ожидания проезда проезжающих слева и справа транспортных средств
[0038] Фиг. 7A и 7B - схемы, иллюстрирующие ситуацию, когда рассматриваемое транспортное средство V1 должно повернуть направо или двигаться прямо на перекрестке 51 после ожидания проезда других транспортных средств справа и слева, в качестве ситуации, когда действие рассматриваемого транспортного средства V1 должно измениться. В этом случае рассматриваемое транспортное средство V1 начинает движение (поворачивая направо или двигаясь прямо), когда и другое транспортное средство V11, приближающееся к перекрестку 51 справа, и другое транспортное средство V12, приближающееся к перекрестку 51 слева, заканчивают прохождение перекрестка 51. Как показано на фиг. 7А, отображается изменяющаяся индикаторная шкала Q6 с одной конечной точкой q42, установленной в заданном положении на левой стороне изображения окружения, и другой конечной точкой q41, установленной в заданном положении на правой стороне изображения окружения. Изменяющаяся индикаторная шкала Q6 отображается параллельно направлению продвижения других транспортных средств V11 и V12.
[0039] Здесь область на изменяющейся индикаторной шкале Q6 от точки q45 в качестве исходной точки, указывающей положение рассматриваемого транспортного средства V1, до точки q43 индикации, указывающей положение другого транспортного средства V11, окрашена. Кроме того, окрашена область от точки q45 до точки q44 индикации, указывающей положение другого транспортного средства V12. Как показано на фиг. 7B, по мере того как другие транспортные средства V11 и V12 приближаются к перекрестку 51, точка q43 индикации на изменяющейся индикаторной шкале Q6 перемещается справа налево, а точка q44 индикации на изменяющейся индикаторной шкале Q6 перемещается от слева направо, и рассматриваемое транспортное средство V1 начинает движение, когда точки индикации q43 и q44 достигают точки q45. По изменениям окрашенных (цветных) областей находящееся в транспортном средстве лицо может распознать момент времени, когда рассматриваемое транспортное средство V1 начинает движение, и поэтому быть готовым к событию, при котором рассматриваемое транспортное средство V1 переключается с остановки на движение вперед.
(5) Случай поворота вправо на перекрестке после ожидания проезда встречного транспортного средства
[0040] На фиг. 8А, 8В и 8С показаны схемы, иллюстрирующие ситуацию, когда рассматриваемое транспортное средство V1 должно повернуть направо на перекрестке 51 после ожидания проезда встречного транспортного средства, в качестве ситуации, когда действие рассматриваемого транспортного средства V1 должно измениться.
[0041] В этом случае рассматриваемое транспортное средство V1 начинает движение (поворачивая направо), когда встречное транспортное средство V21, приближающееся к перекрестку 51 спереди, заканчивает прохождение перекрестка 51. Как проиллюстрировано на фиг. 8А, отображается изменяющаяся индикаторная шкала Q7 с одной конечной точкой q52, установленной в положении переднего конца рассматриваемого транспортного средства V1 на изображении окружения, и другой конечной точкой q51, установленной в заданном положении впереди на изображении окружения. Изменяющаяся индикаторная шкала Q7 отображается параллельно направлению продвижения встречного транспортного средства V21.
[0042] Здесь область на изменяющейся индикаторной шкале Q7 от конечной точки q52 в качестве исходной точки, указывающей положение переднего конца рассматриваемого транспортного средства V1, до точки q53 индикации, указывающей положение встречного транспортного средства V21, окрашена. Как показано на фиг. 8B, по мере того как встречное транспортное средство V21 приближается к перекрестку 51, точка q53 индикации на изменяющейся индикаторной шкале Q7 перемещается сверху вниз. Как проиллюстрировано на фиг. 8C, рассматриваемое транспортное средство V1 начинает движение, когда встречное транспортное средство V21 заканчивает прохождение перекрестка 51. По изменению окрашенной области находящееся в транспортном средстве лицо может распознать момент времени, когда рассматриваемое транспортное средство V1 начинает движение, и поэтому быть готовым к событию, при котором рассматриваемое транспортное средство V1 переключается с остановки на движение вперед. Следует отметить, что фиг. 6А и 6В, фиг. 7A и 7B и фиг. 8A-8C иллюстрируют примеры, где транспортные средства движутся по левой стороне. Право и лево меняются местами в случае правостороннего движения.
Описание работы в этом варианте осуществления
[0043] Далее будет описана работа в этом варианте осуществления со ссылкой на блок-схему последовательности операций, показанную на фиг. 10А, 10В и 10С. Процесс исполняется контроллером 1 дисплея, показанным на фиг. 1. Сначала, на этапе S11, определяют, движется ли рассматриваемое транспортное средство V1 при автономном вождении. Если рассматриваемое транспортное средство V1 движется при автономном вождении (ДА на этапе S11), то на этапе S12 определяют, замедляется ли рассматриваемое транспортное средство V1 или остановилось.
[0044] Если рассматриваемое транспортное средство V1 замедляется или остановилось (ДА на этапе S12), то контур 11 распознавания сцен выявляет сцену, в которой находится рассматриваемое транспортное средство V1, на основании данных карты на этапе S13. Далее, на этапе S14, контур 13 обнаружения положения препятствий обнаруживает присутствующие вокруг рассматриваемого транспортного средства V1 препятствия, такие как другие транспортные средства, пешеходы и животные. Контур 13 обнаружения положения препятствий идентифицирует среди обнаруженных препятствий то препятствие, которое вызвало замедление или остановку транспортного средства, в качестве объекта внимания.
[0045] На этапе S15 контур 11 распознавания сцен определяет, является ли текущая сцена остановкой на перекрестке, или вхождением, или сменой полосы, на основании данных карты и данных текущего местоположения транспортного средства. Если текущая сцена является вхождением или сменой полосы, на этапе S16 контур 13 обнаружения положения препятствий обнаруживает соседнюю полосу и другое транспортное средство, движущееся по соседней полосе. В частности, как показано на фиг. 2A и 3A, контур 13 обнаружения положения препятствий обнаруживает другое транспортное средство V2, движущееся в полосе L2 движения.
[0046] Как показано на фиг. 2A и 2B, контур 12 установки конечных точек и контур 14 отображения изменяющейся индикаторной шкалы устанавливают (задают) изменяющуюся индикаторную шкалу вдоль направления от другого транспортного средства V2 к рассматриваемому транспортному средству V1 (вертикального направления на фиг. 2A и 2B) на этапе S17, и дополнительно устанавливают (задают) две конечные точки изменяющейся индикаторной шкалы на этапе S18. В частности, контур 12 установки конечных точек и контур 14 отображения изменяющейся индикаторной шкалы устанавливают изменяющуюся индикаторную шкалу Q1 с конечными точками q1 и q2, показанными на фиг. 2A и 2B, и отображают изменяющуюся индикаторную шкалу Q1 в положении, не перекрывающем никаких полос на изображении. При этом изменяющаяся индикаторная шкала устанавливается таким образом, чтобы задний конец рассматриваемого транспортного средства V1 и конечная точка q1 были выставлены друг с другом (совмещены) в направлении продвижения транспортных средств. Изменяющаяся индикаторная шкала Q2 также отображается аналогичным образом в примере, показанном на фиг. 3А и 3В.
[0047] Затем выявляют текущее положение объекта внимания на этапе S26 на фиг. 10C. В частности, как показано на фиг. 2А, в качестве объекта внимания идентифицируют другое транспортное средство V2, движущееся позади рассматриваемого транспортного средства V1 на полосе L2 движения.
[0048] На этапе S27 контур 14 отображения изменяющейся индикаторной шкалы сдвигает точку q3 индикации на изменяющейся индикаторной шкале Q1, тем самым изменяя окрашенную область, в соответствии с текущим положением другого транспортного средства V2 (объекта внимания). Как упомянуто ранее, глядя на изменение окрашенной области на изменяющейся индикаторной шкале Q1 или Q2, находящееся в рассматриваемом транспортном средстве лицо может распознать момент времени, когда рассматриваемое транспортное средство V1 меняет полосу, а также то, входит ли рассматриваемое транспортное средство V1 в пространство перед другим транспортным средством V2 или в пространство позади другого транспортного средства V2.
[0049] На этапе S28 определяют, достигло ли другое транспортное средство V2 оконечной точки изменяющейся индикаторной шкалы Q1. Если другое транспортное средство V2 достигло оконечной точки, то заканчивают отображение изменяющейся индикаторной шкалы на этапе S29. На этапе S30 определяют, закончить ли движение с помощью функции автономного вождения, и этот процесс заканчивается, если нужно завершить движение с помощью функции автономного вождения.
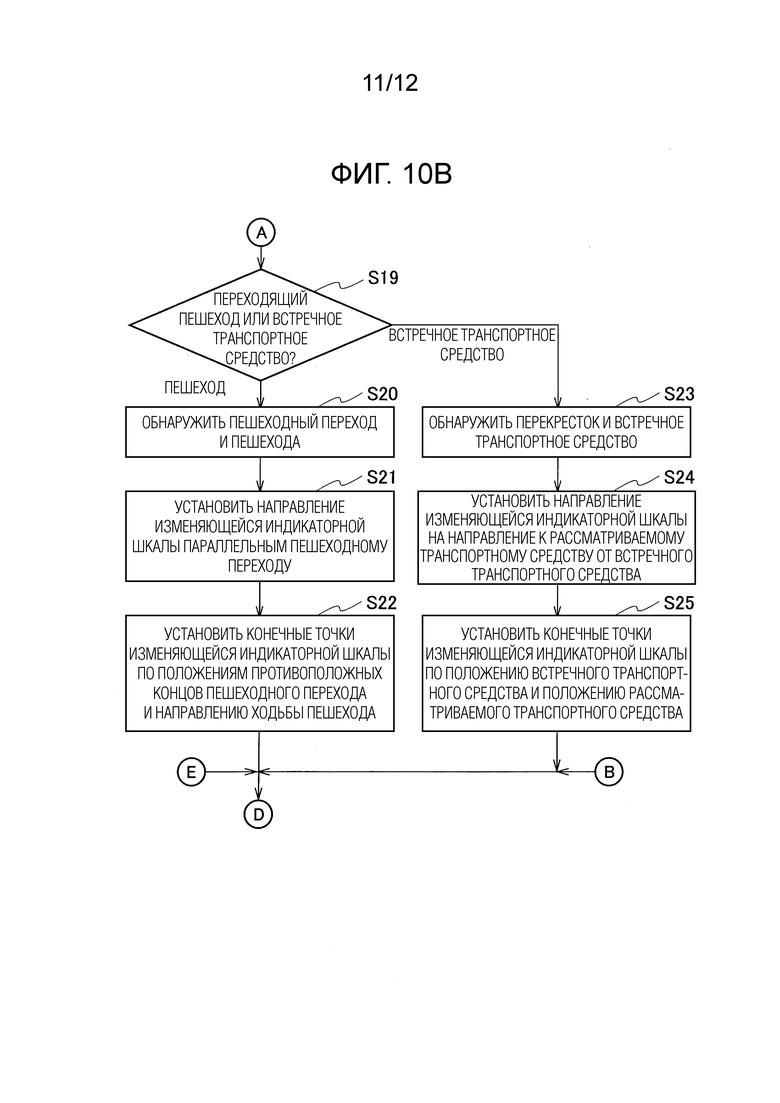
[0050] С другой стороны, если результатом процесса определения на этапе S15 на фиг. 10A является «ПЕРЕКРЕСТОК», то определяют, является ли объект внимания идущим по пешеходному переходу пешеходом или встречным транспортным средством, на этапе S19 на фиг. 10B.
[0051] Если объект внимания определен как пешеход, контур 13 обнаружения положения препятствий обнаруживает положение пешеходного перехода и положение пешехода на этапе S20. Например, как показано на фиг. 4А, обнаруживают пешеходный переход 31 и пешехода 21 на изображении с передней стороны от рассматриваемого транспортного средства V1.
[0052] Контур 12 установки конечных точек и контур 14 отображения изменяющейся индикаторной шкалы задают ориентацию изменяющейся индикаторной шкалы в параллельном пешеходному переходу 31 направлении на этапе S21 и дополнительно устанавливают концы изменяющейся индикаторной шкалы на основании положений противоположных концов пешеходного перехода 31 на этапе S22. В примере, показанном на фиг. 4А, контур 12 установки конечных точек и контур 14 отображения изменяющейся индикаторной шкалы отображают изменяющуюся индикаторную шкалу Q3. Кроме того, контур 12 установки конечных точек и контур 14 отображения изменяющейся индикаторной шкалы устанавливают исходную точку цветной области на основании направления ходьбы пешехода. На фиг. 4А контур 12 установки конечных точек и контур 14 отображения изменяющейся индикаторной шкалы задают конечную точку q12 в качестве исходной точки. После этого, на этапе S26 на фиг. 10C, выявляют текущее положение объекта внимания. В частности, как показано на фиг. 4А, в качестве объекта внимания идентифицируют пешехода 21, идущего по пешеходному переходу 31.
[0053] На этапе S27 контур 14 отображения изменяющейся индикаторной шкалы изменяет позицию отображения на изменяющейся индикаторной шкале Q3 в соответствии с текущим положением пешехода 21 (объекта внимания). В частности, контур 14 отображения изменяющейся индикаторной шкалы изменяет позицию отображения точки q13 индикации на фиг. 4A на позицию отображения на фиг. 4B. Таким образом, глядя на изменение окрашенной области на изменяющейся индикаторной шкале Q3, находящееся в транспортном средстве лицо может распознать момент времени, когда рассматриваемое транспортное средство V1 начинает движение. Следует отметить, что в примере, показанном на фиг. 5А и 5В, находящееся в транспортном средстве лицо тоже может распознать момент времени, когда рассматриваемое транспортное средство V1 начинает движение, по аналогичному изменению отображения изменяющейся индикаторной шкалы Q4. Затем выполняют процессы на этапах S28-S30 аналогично вышеописанному.
[0054] С другой стороны, если результатом процесса определения на этапе S19, проиллюстрированном на фиг. 10B, является «встречное транспортное средство», контур 13 обнаружения положения препятствий обнаруживает положение перекрестка и положение встречного транспортного средства на этапе S23. Например, как показано на фиг. 8A, контур 13 обнаружения положения препятствий обнаруживает встречное транспортное средство V21 на встречной полосе на изображении окрестностей рассматриваемого транспортного средства V1.
[0055] Контур 12 установки конечных точек и контур 14 отображения изменяющейся индикаторной шкалы задают ориентацию изменяющейся индикаторной шкалы в направлении, параллельном направлению движения встречного транспортного средства V21, на этапе S24 и дополнительно устанавливают начальную точку и оконечную точку и отображают изменяющуюся индикаторную шкалу Q7 на этапе S25.
[0056] Затем, на этапе S26, выявляют текущее положение объекта внимания. В частности, как показано на фиг. 8А, в качестве объекта внимания идентифицируют встречное транспортное средство V21.
[0057] На этапе S27 контур 14 отображения изменяющейся индикаторной шкалы сдвигает точку q53 индикации, отображаемую на изменяющейся индикаторной шкале Q7, в соответствии с текущим положением встречного транспортного средства V21. В частности, контур 14 отображения изменяющейся индикаторной шкалы сдвигает точку q53 индикации, как на фиг. 8A, фиг. 8B и фиг. 8C, в этом порядке. Как упомянуто ранее, глядя на изменение окрашенной области на изменяющейся индикаторной шкале Q7, находящееся в рассматриваемом транспортном средстве V1 лицо может распознать момент времени, когда рассматриваемое транспортное средство V1 начинает движение. Затем выполняют процессы на этапах S28-S30 аналогично вышеописанному.
[0058] На блок-схеме последовательности операций, показанной на фиг. 10A, 10B и 10C, было дано описание процесса в случаях совершения смены полосы, показанного на фиг. 2А и 2В и фиг. 3А и 3В, при ожидании, пока пешеход завершит пересечение пешеходного перехода, показанном на фиг. 4А и 4В и фиг. 5А и 5В, и при ожидании встречного транспортного средства, показанном на фиг. 8А, 8В и 8С. Следует отметить, однако, что можно указать момент времени, когда изменяется действие рассматриваемого транспортного средства V1, также в случае поворота налево на перекрестке, как показано на фиг. 6A и 6B, и в случае поворота направо на перекрестке, как показано на фиг. 7А и 7В, путем отображения изменяющейся индикаторной шкалы и изменения ее цветной области в соответствии с перемещением объекта внимания посредством процесса, аналогичного описанному выше.
Описание преимущественных эффектов
[0059] Этот вариант осуществления с вышеуказанной конфигурацией обеспечивает следующие преимущественные эффекты.
(1) Тот момент времени, когда действие рассматриваемого транспортного средства V1 должно измениться функцией автономного вождения рассматриваемого транспортного средства V1, например, момент времени, когда рассматриваемое транспортное средство V1 меняет полосу или начинает движение на перекрестке, отображается синхронно с обстановкой вокруг транспортного средства V1. Поэтому находящееся в транспортном средстве лицо может интуитивно распознать время изменения действия. Это уменьшает чувство неадекватности, ощущаемое находящимся в транспортном средстве лицом.
[0060] (2) Тот момент времени, когда изменяется действие рассматриваемого транспортного средства V1, отображается изменяющейся индикаторной шкалой с точкой индикации (позицией индикации), которая смещается в пределах всей отображаемой рамки синхронно с окружающей обстановкой. Находящееся в транспортном средстве лицо может таким образом уяснить изменение окружающей обстановки до того момента, когда действие рассматриваемого транспортного средства V1 изменится, и поэтому правильно определить момент времени изменения действия.
[0061] (3) Тот момент времени, когда изменяется действие рассматриваемого транспортного средства V1, отображается на основании относительного расстояния между рассматриваемым транспортным средством V1 и объектом внимания, таким как другое транспортное средство. Таким образом, когда объектом внимания является триггер, который изменяет действие рассматриваемого транспортного средства V1, время изменения действия отображается синхронно с взаимным пространственным расположением рассматриваемого транспортного средства V1 и объекта внимания. Поэтому находящееся в транспортном средстве лицо может более правильно уяснить момент времени изменения действия.
[0062] (4) Расстояние от конца изменяющейся индикаторной шкалы до отображаемой в ней точки индикации задается в соответствии с положениями рассматриваемого транспортного средства V1 и объекта внимания. Таким образом, когда объектом внимания является триггер, который изменяет действие рассматриваемого транспортного средства V1, время изменения действия отображается синхронно с взаимным пространственным расположением рассматриваемого транспортного средства V1 и объекта внимания. Поэтому находящееся в транспортном средстве лицо может более правильно уяснить момент времени изменения действия.
[0063] (5) Перемещение на изменяющейся индикаторной шкале и направлении перемещения объекта внимания соответствуют друг другу. Таким образом, когда объектом внимания является триггер, изменяющий действие рассматриваемого транспортного средства V1, время такого изменения отображается в направлении перемещения объекта внимания. Поэтому находящееся в транспортном средстве лицо может более правильно уяснить момент времени изменения действия.
[0064] (6) Направление перемещения на изменяющейся индикаторной шкале и направление перемещения объекта внимания совмещены друг с другом. Таким образом, находящееся в транспортном средстве лицо может смотреть на отображаемую изменяющуюся индикаторную шкалу без чувства неадекватности относительно направления перемещения объекта внимания и поэтому более правильно уяснить момент времени изменения действия.
[0065] (7) Позиции концов изменяющейся индикаторной шкалы и положение объекта внимания совмещены друг с другом. Таким образом, отображение объекта внимания и отображение изменяющейся индикаторной шкалы легко ассоциируются друг с другом. Поэтому находящееся в транспортном средстве лицо может более правильно уяснить момент времени изменения действия.
[0066] (8) Изменяющаяся индикаторная шкала отображается с градацией, что позволяет отображать текущее положение объекта внимания в некоторой степени неопределенно. Поэтому, даже когда перемещение объекта внимания меняется, находящееся в транспортном средстве лицо все равно может правильно уяснить момент времени изменения действия.
[0067] Следует отметить, что моменты времени изменения действия в этом варианте осуществления включают любые моменты времени, когда изменяется действие или поведение транспортного средства, такие как момент времени, когда транспортное средство начинает двигаться, момент времени, когда транспортное средство останавливается, момент времени, когда транспортное средство начинает ускоряться, момент времени, когда транспортное средство начинает замедляться, момент времени, когда меняется угол поворота руля, момент времени, когда меняется угловая скорость поворота руля, момент времени, когда транспортное средство начинает левый или правый поворот, момент времени, когда транспортное средство заканчивает левый или правый поворот, момент времени, когда транспортное средство начинает смену полосы, и момент времени, когда транспортное средство заканчивает смену полосы.
[0068] Хотя выше были описаны варианты осуществления настоящего изобретения, не следует понимать, что описание и чертежи, составляющие часть этого раскрытия, ограничивают данное изобретение. Из этого раскрытия специалистам в данной области техники станут очевидными различные альтернативные варианты осуществления, примеры и методы работы.
Перечень ссылочных обозначений
[0069] 1 - контроллер дисплея
2 - дисплей
3 - база данных карт
4 - устройство GPS
5 - ЛДМ
6 - камера
7 - датчик угла поворота руля
8 - датчик скорости транспортного средства
11 - контур распознавания сцен
12 - контур установки конечных точек
13 - контур обнаружения положения препятствий
14 - контур отображения изменяющейся индикаторной шкалы
15 - контур отображения ЧМИ
16 - контур объединения изображений






Изобретение относится к способу и устройству отображения окружающей обстановки. Способ отображения окружающей обстановки содержит отображение на изменяющейся индикаторной шкале позиции индикации, переместившейся к одной конечной точке изменяющейся индикаторной шкалы, в качестве момента времени, когда действие рассматриваемого транспортного средства изменяется функцией автономного вождения. Изменяющаяся индикаторная шкала имеет заданную индикаторную рамку и отображает позицию индикации внутри индикаторной рамки синхронно с перемещением объекта внимания. Достигается повышение безопасности управления транспортным средством. 3 н. и 6 з.п. ф-лы, 20 ил.
1. Способ отображения окружающей обстановки с обнаружением окружающей обстановки вокруг рассматриваемого транспортного средства с функцией автономного вождения и отображением обнаруженной окружающей обстановки, содержащий
отображение на изменяющейся индикаторной шкале, которая имеет заданную индикаторную рамку и отображает позицию индикации внутри индикаторной рамки синхронно с перемещением объекта внимания, позиции индикации, переместившейся к одной конечной точке изменяющейся индикаторной шкалы, в качестве момента времени, когда действие рассматриваемого транспортного средства изменяется функцией автономного вождения.
2. Способ отображения окружающей обстановки по п. 1, содержащий смещение позиции индикации внутри индикаторной рамки в соответствии с относительным расстоянием между рассматриваемым транспортным средством и объектом внимания.
3. Способ отображения окружающей обстановки по п. 1, содержащий установку расстояния от одного конца изменяющейся индикаторной шкалы до позиции индикации в соответствии с положениями рассматриваемого транспортного средства и объекта внимания.
4. Способ отображения окружающей обстановки по любому из пп. 1-3, содержащий установление перемещения на изменяющейся индикаторной шкале и направления перемещения объекта внимания соответствующими друг другу.
5. Способ отображения окружающей обстановки по п. 4, содержащий совмещение направления перемещения на изменяющейся индикаторной шкале с направлением перемещения объекта внимания.
6. Способ отображения окружающей обстановки по п. 4, содержащий совмещение позиции конца изменяющейся индикаторной шкалы с положением объекта внимания.
7. Способ отображения окружающей обстановки по п. 1, содержащий отображение позиции индикации на изменяющейся индикаторной шкале с градацией.
8. Устройство отображения окружающей обстановки для обнаружения окружающей обстановки вокруг рассматриваемого транспортного средства с функцией автономного вождения и отображения обнаруженной окружающей обстановки, содержащее
дисплей, выполненный с возможностью отображения на изменяющейся индикаторной шкале, которая имеет заданную индикаторную рамку и отображает позицию индикации внутри индикаторной рамки синхронно с перемещением объекта внимания, позиции индикации, переместившейся к одной конечной точке изменяющейся индикаторной шкалы, в качестве момента времени, когда действие рассматриваемого транспортного средства изменяется функцией автономного вождения.
9. Способ отображения окружающей обстановки с обнаружением окружающей обстановки вокруг рассматриваемого транспортного средства с функцией автономного вождения и отображением обнаруженной окружающей обстановки, содержащий этап, на котором заставляют пользователя распознавать момент времени, когда действие рассматриваемого транспортного средства изменяется функцией автономного вождения, по перемещению позиции индикации на изменяющейся индикаторной шкале, которая имеет заданную индикаторную рамку и отображает позицию индикации внутри индикаторной рамки синхронно с перемещением объекта внимания.
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| JP 2017074918 A, 20.04.2017 | |||
| УСТРОЙСТВО ТЕХНИЧЕСКОЙ ПОДДЕРЖКИ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ И СПОСОБ ТЕХНИЧЕСКОЙ ПОДДЕРЖКИ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2011 |
|
RU2566326C1 |

