Изобретение касается способа для диагностики и контроля транспортных средств, компонентов транспортных средств, путей движения, а также компонентов путей движения, в частности для рельсовых транспортных средств и инфраструктур рельсовых транспортных средств, при этом проводятся измерения посредством по меньшей мере одного первого сенсора и осуществляется обработка сигналов посредством по меньшей мере одного вычислительного блока.
Транспортные средства, в частности рельсовые транспортные средства, должны обладать высокой безопасностью движения. Поэтому важна точная оценка и предсказание технических состояний транспортных средств, ходовых частей, путей движения и других компонентов транспортных средств, а также инфраструктур. Также имеет значение результативное и экономически эффективное техническое обслуживание и профилактика транспортных средств и инфраструктур.
Из уровня техники известна DE 101 63 148 A1, в которой показан способ контроля и диагностики для рельсового транспортного средства, при этом регистрируются эксплуатационные параметры рельсового транспортного средства, и для характеристики поведения при движении рельсового транспортного средства эти эксплуатационные параметры вводятся в иерархию контроля. Названный подход в своем известном варианте имеет тот недостаток, что хотя сигналы измерений аналитически обрабатываются посредством статистических способов, однако не явствуют никакие оценки или прогнозы результатов аналитической обработки с применением статистических методов.
Поэтому в основе изобретения лежит задача, предложить особенно надежный способ, усовершенствованный по сравнению с уровнем техники.
В соответствии с изобретением эта задача решается с помощью способа вышеназванного вида,
при котором в указанный по меньшей мере один вычислительный блок вводятся по меньшей мере измеренные первые сигналы,
при котором из указанных по меньшей мере первых сигналов получается по меньшей мере один первый показатель,
при котором указанный по меньшей мере первый показатель или по меньшей мере одна первая комбинация показателей классифицируется посредством по меньшей мере одной первой статистической модели, или выполняется прогноз на основе указанного по меньшей мере первого показателя или указанной по меньшей мере первой комбинации показателей, и
при котором из по меньшей мере одного результата классификации или из по меньшей мере одного результата прогноза определяется по меньшей мере один технический первый индикатор состояния применительно к по меньшей мере одному первому компоненту транспортного средства или по меньшей мере одному компоненту пути движения.
Тем самым достигаются особенно надежное обнаружение повреждений, чрезмерного износа и пр., а также результативное, ориентированное на состояние техническое обслуживание и профилактика транспортных средств и инфраструктур, при этом можно рассчитывать на приемлемое или, соответственно, пренебрежимо малое количество ложных тревог.
Это осуществляется благодаря тому, что при предлагаемом изобретением способе классификация или прогноз показателей или комбинаций различных показателей выполняется посредством статистических моделей. Это означает, что, например, неисправные или исправные состояния или, соответственно, неправильное или правильное поведение какого-либо компонента транспортного средства (например, демпфера) или какого-либо компонента пути движения (например, рельсового пути) не должны или, соответственно, не должно больше обнаруживаться по жестким предельным значениям, а что, например, предельные значения или характеристики предельных значений и пр. могут адаптироваться в зависимости от условий эксплуатации транспортного средства или инфраструктуры, поведения при выходе из строя какого-либо компонента транспортного средства или инфраструктуры и т.п. При этом индикаторы состояний могут определяться, например, из распределений частости результатов классификации или результатов прогноза.
Один из предпочтительных вариантов осуществления получают, когда указанная по меньшей мере первая статистическая модель строится посредством метода машинного обучения.
Благодаря этой мере с увеличивающимся количеством регистрируемых эксплуатационных данных достигается непрерывное улучшение или, соответственно, возрастание надежности предлагаемого изобретением способа в отношении обнаружения и оценки технических состояний, так как первая статистическая модель обучается на основе эксплуатационных данных, и поэтому с увеличением времени неисправные состояния могут все лучше отличаться от исправных состояний.
Предпочтительно, когда указанная по меньшей мере одна первая статистическая модель строится на основе расчета равновесия. Таким образом, для классификации и/или прогноза показателей в связи с предлагаемым изобретением способом доступны разные статистические модели, которые также могут комбинироваться друг с другом. То есть, например, можно не только обнаруживать мгновенные неисправные состояния, но и оценивать неисправные состояния путем интерполяции или экстраполяции, предсказывать достижение предельных эксплуатационных размеров и пр.
Удобное решение получается, когда указанному по меньшей мере первому индикатору состояний присваивается первое значение вероятности наступления некоторого технического состояния, которое может индицироваться по указанному по меньшей мере одному результату классификации или указанному по меньшей мере одному результату прогноза. Благодаря этой мере дополнительно уменьшаются риски в отношении ложных тревог, так как обнаружение неисправных состояний может производиться не только на базе предельных значений или, соответственно, характеристик предельных значений, но и на основе вероятностей искажений этих предельных значений или этих характеристик предельных значений и пр.
Эти вероятности могут получаться, например, на основе частостей названных искажений.
Также предпочтительно, когда из сигналов одной-n1 категорий сигналов и найденных из них одного-n2 показателей получаются один-n3 индикаторов состояния, имеющих одну-n4 значений вероятности, при этом каждому из этих одного-n3 индикаторов состояния ставится в соответствие одно-n4 значений вероятности, и из этих одного-n4 значений вероятности получается комбинированный индикатор состояния, имеющий присвоенное комбинированное значение вероятности. Причем этот комбинированный индикатор состояния может получаться, например, посредством пробабилистической графической модели. При применении более одного индикатора состояния технические состояния могут оцениваться с лучшим качеством. Если, например, первый индикатор состояния или, соответственно, первая индикация состояний, имеющая высокое первое значение вероятности, указывает на ошибку первого компонента транспортного средства, и второй индикатор состояния или, соответственно, вторая индикация состояний, имеющая низкое второе значение вероятности, выражает ошибку второго компонента транспортного средства, то первая индикация состояний может проверяться на правдоподобие и обеспечиваться посредством второй индикации состояний (и наоборот).
Один из предпочтительных вариантов осуществления получают, когда данные из по меньшей мере одного этапа способа применяются в собственном бортовом устройстве диагностики и/или контроля транспортного средства. Например, могут применяться показатели или индикаторы состояний. В собственном бортовом устройстве диагностики и/или контроля могут осуществляться дальнейшая аналитическая обработка и/или получение событий предупреждения, выдачи статуса или, соответственно, ошибок и пр. Они могут, например, выдаваться в виде оптических и/или акустических предупредительных указаний и/или статусной информации или, соответственно, контрольной и/или диагностической информации на пульте машиниста транспортного средства.
Однако предпочтительно также, когда данные из по меньшей мере одного этапа способа передаются в устройство, находящееся в инфраструктуре. Благодаря этой мере может осуществляться наземная аналитическая обработка показателей, индикаторов состояний и пр. (например, в пункте технического обслуживания), при этом данные целых парков транспортных средств могут объединяться и сравниваться друг с другом.
Ниже изобретение поясняется подробнее на примерах осуществления.
Наглядно показано:
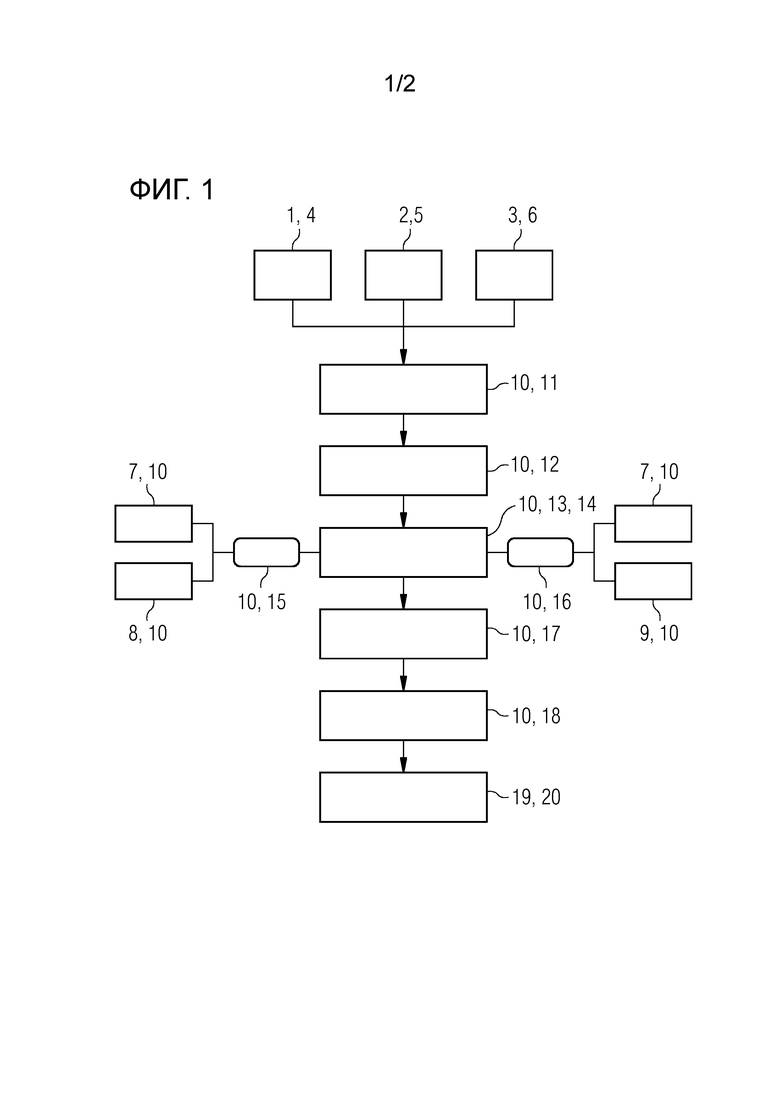
фиг. 1: блок-схема одного из наглядных вариантов осуществления предлагаемого изобретением способа;
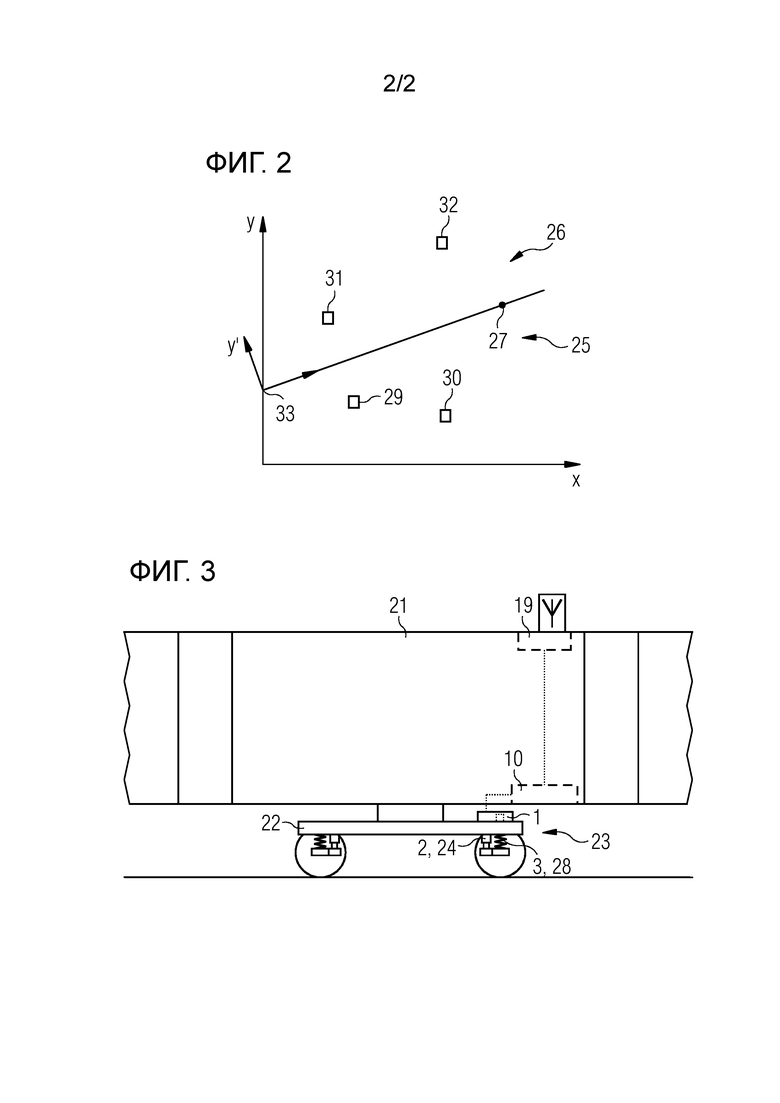
фиг. 2: результирующий график, содержащий определенные посредством метода Support Vector Machine (англ. метод опорных векторов) результаты классификации одного из наглядных вариантов осуществления предлагаемого изобретением способа, и
фиг. 3: рельсовое транспортное средство, имеющее сенсоры, вычислительный блок и устройство передачи данных для осуществления предлагаемого изобретением способа.
Схематично изображенный на фиг.1, один из наглядных вариантов осуществления предлагаемого изобретением, частично имплементированного в компьютер способа имплементирован в вычислительный блок 10, который расположен в кузове 21 вагона рельсового транспортного средства, изображенного на фиг.3. На раме 22 ходовой части 23 рельсового транспортного средства предусмотрен первый сенсор 1, который измеряет ускорения рамы 22 ходовой части, т.е. выполнен в виде сенсора ускорений. Кроме того, выполненный в виде сенсора температуры второй сенсор 2 соединен с демпфером 24 ходовой части 23, а выполненный в виде тензометрической полоски третий сенсор 2 расположен на рессоре 28 ходовой части 23. Второй сенсор 2 измеряет температуры демпфера, третий сенсор 3 деформации рессоры 28. Первый сенсор 1, второй сенсор 2 и третий сенсор 3 непрерывно проводят измерения.
Первый сенсор 1, второй сенсор 2, третий сенсор 3 и вычислительный блок 10 снабжаются электричеством посредством не изображенного устройства электропитания. В вычислительном блоке 10, который соединен с первым сенсором 1, вторым сенсором 2 и третьим сенсором 3, осуществляется непрерывная обработка 11 сигналов и аналитическая обработка непрерывно регистрируемых первых сигналов 4 первого сенсора 1, вторых сигналов 5 второго сенсора 2 и третьих сигналов 6 третьего сенсора 3. Также в процессы аналитической обработки вычислительного блока 10 включаются уже предварительно обработанные референтные сигналы, т.е. записанные и обработанные по времени раньше первых сигналов 4 первые референтные сигналы, записанные и обработанные по времени раньше вторых сигналов 5 вторые референтные сигналы, а также записанные и обработанные по времени раньше третьих сигналов 6 третьи референтные сигналы.
Обработка 11 сигналов включает в себя сохранение в памяти первых сигналов 4, вторых сигналов 4 и третьих сигналов 6, а также их подготовку к процессам аналитической обработки.
Первые сигналы 4 и первые референтные сигналы представляют собой сигналы ускорения рамы 22 ходовой части, вторые сигналы 5 и вторые референтные сигналы - сигналы температуры демпфера 24, третьи сигналы 6 и третьи референтные сигналы - сигналы деформации рессоры 28.
Из первых сигналов 4 получаются первые показатели, из вторых сигналов 5 вторые показатели и из третьих сигналов 6 третьи показатели (определение 12 показателей). По времени раньше первых показателей, вторых показателей и третьих показателей из первых референтных сигналов получаются первые референтные показатели 7, из вторых референтных сигналов вторые референтные показатели 8, а из третьих референтных сигналов третьи референтные показатели 9. Первые показатели, вторые показатели, третьи показатели, первые референтные сигналы 7, вторые референтные сигналы 8 и референтные сигналы 9 представляют собой статистические показатели, в этом наглядном варианте осуществления предлагаемого изобретением способа средние значения из характеристик ускорения, температуры демпфера и деформации рессоры. Однако в соответствии с изобретением возможно также, чтобы в качестве статистических показателей получались минимумы, максимумы и пр. Эти статистические показатели относятся к заданным отрезкам пути или, соответственно, отрезкам времени, присваиваемым этим отрезкам пути посредством зависимости от скорости движения рельсового транспортного средства. На протяжении этих отрезков пути или, соответственно, времени показатели поставлены в соответствие референтным показателям, т.е. первые показатели отнесены к тем же отрезкам пути и времени, что и первые референтные показатели 7, вторые показатели к тем же отрезкам пути и времени, что и вторые референтные показатели 8, а третьи показатели к тем же отрезкам пути и времени, что и третьи референтные показатели 9.
Первые показатели, вторые показатели и третьи показатели подставляются в первую статистическую модель 15, вторую статистическую модель 16, а также в другие статистические модели, которые имплементированы в вычислительный блок 10, и посредством этих статистических моделей непрерывно классифицируются и прогнозируются (классификация 13 и прогноз 14).
Первая статистическая модель 15 и вторая статистическая модель 16 строятся посредством метода машинного обучения, так называемого метода Support Vector Machine. Метод Support Vector Machine известен из уровня техники и применяется для этого наглядного варианта осуществления предлагаемого изобретением способа в линейном бинарном варианте, чтобы классифицировать показатели или, соответственно, комбинации показателей.
Первая статистическая модель 15 строится или, соответственно, обучается из первых референтных показателей 7, а также вторых референтных показателей 8, а вторая статистическая модель 16 из первых референтных показателей 7, а также третьих референтных показателей 9. То есть первые референтные показатели 7, вторые референтные показатели 8 и третьи референтные показатели 9 выполняют функцию обучающих данных для первой статистической модели 15 и второй статистической модели.
Например, из прошлого наблюдения за демпфером 24 известно, что, когда рама 22 ходовой части в течение долгого времени, т.е. с наблюдаемой частостью имеет некоторое ускорение в заданном первом интервале ускорений, а демпфер 24 в течение долгого времени, т.е. с наблюдаемой частостью некоторую температуру в пределах заданного первого интервала температур, имеет место исправное состояние демпфера 24. Таже из прошлого наблюдения за демпфером 24 известно, что, когда рама 22 ходовой части в течение долгого времени, т.е. с наблюдаемой частостью имеет некоторое ускорение в заданном втором интервале ускорений, а демпфер 24 в течение долгого времени, т.е. с наблюдаемой частостью, некоторую температуру в пределах заданного второго интервала температур, имеет место повреждение или, соответственно, дефектное или неисправное состояние демпфера 24.
Интервалы ускорений и интервалы температур, которые указывают на неисправное или исправное состояние демпфера 24, могут изменяться в зависимости от поведения рельсового транспортного средства при эксплуатации. Существенно, что демпфер 24 наблюдается, и при этом интервалы ускорений и интервалы температур связываются с неисправными или исправными состояниями демпфера 24. Первая статистическая модель 15 построена на основе комбинаций показателей или, соответственно, комбинаций референтных показателей, т.е. коррелирующие друг с другом по месту и времени пары из первых референтных показателей 7 и вторых референтных показателей 8, в зависимости от того, лежат ли они в первом интервале ускорений или во втором интервале ускорений или, соответственно, в первом интервале температур или во втором интервале температур, указывают на благоприятные или неблагоприятные состояния демпфера 24.
Комбинации референтных показателей, которые отображают благоприятное состояние демпфера (т.е. пары из первых референтных показателей 7 и вторых референтных показателей 8, которые лежат в первом интервале ускорений и первом интервале температур), определяют первую область 25 состояний, которая лежит ниже разделительной прямой 27, отображающие неблагоприятное состояние демпфера комбинации референтных показателей (т.е. пары из первых референтных показателей 7 и вторых референтных показателей 8, которые лежат во втором интервале ускорений и втором интервале температур), вторую область 26 состояний, которая лежит выше разделительной прямой 27. Первая область 25 состояний, вторая область 26 состояний и разделительная прямая 27, которые изображены на фиг.2 в виде графика, могут локализироваться посредством векторов. Разделительная прямая 27 строится из комбинаций референтных значений таким образом, что нормальные расстояния от разделительной прямой 27 до комбинаций референтных показателей первой области 25 состояний математически отрицательны, нормальные расстояния от разделительной прямой 27 до комбинаций референтных показателей второй области 26 состояний математически положительны. Соответствующее правило построения разделительной прямой 27 известно из уровня техники и описано, например, в Ethem A., Introduction to Machine Learning, Third Edition, The MIT Press Cambridge, Massachusetts, Лондон, Англия, 2014 г.
В этом наглядном варианте осуществления предлагаемого изобретением способа дополнительно предусмотрено обучение статистических моделей только на базе одной категории референтных показателей (например, на основе вторых референтных показателей 8 и их поведения во времени и т.п.), т.е. без применения комбинаций референтных показателей. Благодаря этому состояния демпфера могут оцениваться даже тогда, когда, например, из-за дефектов сенсоров доступна только одна категория референтных показателей.
Вторая статистическая модель 16 строится по той вышеописанной схеме, которая применяется также для построения первой статистической модели 15. Однако для построения второй статистической модели 16 применяются ускорения и интервалы ускорений рамы 22 ходовой части в комбинации с деформациями и интервалами деформаций рессоры 28.
Посредством первой статистической модели 15 и второй статистической модели 16 осуществляется классификация 13 показателей. При этом полученные из первых показателей и вторых показателей первые комбинации показателей в зависимости от их положения относительно разделительной прямой 27 ставятся в соответствие первой области 25 состояний или второй области 26 состояний первой статистической модели 15. Полученные из первых показателей и третьих показателей вторые комбинации показателей по той же схеме ставятся в соответствие соответствующим областям состояний второй статистической модели 16. В этом наглядном варианте осуществления предлагаемого изобретением способа дополнительно предусмотрено осуществление классификации 13 не только на базе комбинаций показателей, но и на основе отдельных показателей (например, вторых показателей и их поведения во времени). Для этого, например, вторые показатели подставляются в ту статистическую модель, которая построена посредством вторых референтных показателей 8 без применения комбинаций референтных показателей.
Посредством других статистических моделей на базе расчета равновесия осуществляется прогноз 14 на основе показателей. Для этого предусмотрены или, соответственно, имплементированы в вычислительный блок 10 известные из уровня техники, линейные функции регрессии. Эти функции регрессии получаются из первых показателей, вторых показателей и третьих показателей посредством известных из уровня техники правил получения и применяются для того, чтобы производить интерполяции или экстраполяции на базе показателей. Например, выполняются регрессии вторых показателей и первых комбинаций показателей в зависимости от скорости движения, чтобы можно было получить функциональную зависимость между вторыми показателями и первыми комбинациями показателей, с одной стороны, и скоростью движения, с другой стороны. Благодаря этому могут, например, определяться максимальные скорости движения, до которых может эксплуатироваться демпфер 24 без наступления преждевременно чрезмерного износа и пр.
Из распределений частости результатов классификации и результатов прогноза затем непрерывно определяются индикаторы состояний (определение 17 индикаторов). Результаты классификации представляют собой в этом наглядном варианте осуществления предлагаемого изобретением способа установки соответствий показателей или, соответственно, комбинаций показателей областям состояний статистических моделей. Результаты прогноза являются, например, прогнозами средних температур в зависимости от скорости движения.
Первый индикатор состояния получается таким образом, что некоторое количество поставленных в соответствие второй области 26 состояний первых комбинаций показателей соотносится с общим числом первых комбинаций показателей, т.е. ставится с ними в отношение. Отсюда получается первый показатель вероятности, который дает сведения о том, насколько вероятен дефект демпфера. То есть первый индикатор состояния содержит информацию «демпфер дефектен» с некоторой присвоенной этому дефекту демпфера вероятностью.
По той же схеме применительно ко второй комбинации показателей получается второй индикатор состояния, касающийся дефекта рессоры, имеющего присвоенный второй показатель вероятности. Другие индикаторы состояний получаются по той же схеме из вторых показателей или, соответственно, установки их соответствия областям состояний в статистических моделях, построенных посредством вторых референтных показателей 8 без применения комбинаций референтных показателей.
Индикаторы состояний получаются из результатов прогноза, при этом экстраполированной средней температуре демпфера присваивается вероятность достоверности, которая определяется в зависимости от частости возникновения лежащих в заданных пределах допусков, экстраполированных средних температур демпфера. Индикаторы состояний из результатов прогноза дают, таким образом, в т.ч., прогнозы о состоянии демпфера 24 (например, прогноз, согласно которому могут ожидаться высокий износ демпфера 24 при эксплуатации выше определенной скорости движения и уменьшение срока службы демпфера 24) или какого-либо другого компонента с присвоенной вероятностью достоверности.
Также осуществляется непрерывное комбинирование 18 индикаторов таким образом, что из сигналов одной-n1=3 категорий сигналов (первые сигналы 4, вторые сигналы 5, третьи сигналы 6) и найденных из них одного-n2=3 показателей (первые показатели, вторые показатели, третьи показатели; n2 больше или равно n1), получаются один-n3=2 индикаторов состояний (первый индикатор состояния, второй индикатор состояния), имеющие одно-n4=2 значений вероятности (первое значение вероятности, второе значение вероятности) (см. выше), при этом каждому из одного-n3=2 индикаторов состояний присваивается одно из одного-n4=2 значений вероятности (см. выше), и из этих одного-n4=2 значений вероятности получается комбинированный индикатор состояния, имеющий присвоенное ему комбинированное значение PK вероятности. Для этого каждое из одного-n4=2 значений вероятности получается из частости некоторого специфического результата классификации, отнесенного к общему числу результатов классификации (см. выше), и комбинированное значение PK вероятности получается как условная вероятность из этих одного-n4=2 значений вероятности.
Комбинированное значение PK вероятности получается посредством пробабилистической графической модели на основе метода машинного обучения. Для этого принципиально применяется следующее правило получения:
Комбинированное значение PK вероятности находится из первого параметра PDF, который указывает вероятность индикации ошибки демпфера 24 с помощью первого индикатора состояния и второго индикатора состояния при фактическом наличии неисправного состояния демпфера 24, из второго параметра PF, который описывает вероятность фактического наличия неисправного состояния демпфера 24, и из третьего параметра PD, который указывает вероятность индикации ошибки с помощью первого индикатора состояния и второго индикатора состояния. Комбинированное значение PK вероятности описывает вероятность фактического наличия неисправного состояния демпфера 24 при условии, что с помощью первого индикатора состояния и второго индикатора состояния индицируется ошибка. Если непосредственно относящийся к демпферу 24 первый индикатор состояния, например, отображает ошибку с высокой вероятностью, а относящимся к рессоре 28 вторым индикатором состояний делается указание на ошибку с низкой вероятностью, то комбинированный индикатор состояния будет с высокой вероятностью индицировать ошибку демпфера 24.
Первый параметр PDF, второй параметр PF и третий параметр PD непрерывно адаптируются путем эксплуатационных наблюдений. Например, второй параметр PF увеличивается, когда на протяжении заданного периода времени наблюдается повышенная частость какого-либо дефекта демпфера. Из этих эксплуатационных наблюдений получаются обучающие данные для функциональной зависимости второго параметра PF на протяжении некоторого времени, посредством которой параметрируется увеличение вероятности выхода из строя демпфера 24 при увеличивающейся продолжительности применения и обучается пробабилистическая графическая модель.
В этом наглядном примере осуществления предлагаемого изобретением способа первый индикатор состояния относится к первому компоненту транспортного средства (демпфер 24), а второй индикатор состояния ко второму компоненту транспортного средства (рессора 28). Однако в соответствии с изобретением возможно также, чтобы, например, как первый индикатор состояния, так и второй индикатор состояния относились к первому компоненту транспортного средства. Это реализуется, например, таким образом, что на или в демпфере 24 предусмотрены два различных сенсора, которые создают различные сигналы (например, сигналы температуры и сигналы давления масла).
В этом наглядном примере осуществления предлагаемого изобретением способа на базе первых показателей и скорости движения получается также третий индикатор состояния, который индицирует несправные и исправные состояния рельсового пути, т.е. пути движения или, соответственно, какого-либо компонента пути движения. Из наблюдений поведения при повреждении рельсового пути по поясненной выше схеме с помощью комбинаций референтных показателей из ускорений рамы 22 транспортного средства и скоростей движения посредством метода Support Vector Machine строится статистическая модель, которая имеет области состояний для неисправных и исправных состояний рельсового пути. Комбинации показателей из непрерывно измеряемых ускорений рамы 22 транспортного средства и измеряемых скоростей движения ставятся в соответствие областям состояний, в результате чего осуществляется классификация комбинаций показателей. Из распределения частости соответствующих результатов классификации определяется третий индикатор состояния.
Данные, полученные на этапе комбинирования 18 индикаторов способа (данные из первого индикатора состояния, второго индикатора состояния и третьего индикатора состояния) подставляются в имплементированное в вычислительный блок 10 устройство диагностики и контроля и там непрерывно подвергаются дальнейшей аналитической обработке. Также эти данные для дальнейшей аналитической обработки посредством показанного на фиг.3 устройства 19 передачи данных передаются в пункт технического обслуживания, т.е. в устройство, находящееся в инфраструктуре (передача 20 данных).
На фиг.2 показан график, имеющий первую область 25 состояний, вторую область 26 состояний и разделительную прямую 27 первой статистической модели 15, которые описаны также в связи с фиг.1, получаются на базе метода Support Vector Machine и с помощью которых могут оцениваться технические состояния показанного на фиг.2 демпфера 24.
На оси x этого графика нанесены ускорения, на оси y температуры демпфера. Первой области 25 состояний поставлены в соответствие первое функциональное значение 29 и второе функциональное значение 30 первых комбинаций показателей, которые описаны с связи с фиг.1. Второй области 26 состояний поставлены в соответствие третье функциональное значение 31 и четвертое функциональное значение 32 первых комбинаций показателей. Первое функциональное значение 29, второе функциональное значение 30, третье функциональное значение 31 и четвертое функциональное значение 32 получены из первых комбинаций показателей. Первые комбинации показателей, в свою очередь, получены из первых показателей применительно к ускорениям показанной на фиг.3 рамы 22 транспортного средства и из вторых показателей применительно к температурам демпфера 24.
В декартовой системе 33 координат первое функциональное значение 29 и второе функциональное значение 30 имеют отрицательные уʽ-координаты, а третье функциональное значение 31, а также четвертое функциональное значение 32 положительные уʽ-координаты. Первое функциональное значение 29 и второе функциональное значение 30 поставлены в соответствие благоприятному состоянию демпфера, третье функциональное значение 31 и четвертое функциональное значение 32 неблагоприятному состоянию демпфера. Как описано в связи с фиг.1, из частости неблагоприятных состояний демпфера (например, при возникновении таких состояний больше трех раз в день) получается первый индикатор состояния, который в данном случае индицирует дефект демпфера.
По той же показанной на фиг.2 схеме также функциональные значения, которые получены из вторых комбинаций показателей, ставятся в соответствие соответствующим областям состояний описанной в связи с фиг.1 второй статистической модели 16. При этом вторые комбинации показателей, как упомянуто в связи с фиг.1, получаются из первых показателей, а также третьих показателей применительно к деформации показанной на фиг.3 рессоры 28. Как описано в связи с фиг.1, из частости неблагоприятных состояний рессоры на основе соответствия функциональных значений ускорения-деформации рессоры областям состояний получается второй индикатор состояния, который в данном случае индицирует дефект рессоры (например, при возникновении таких состояний рессоры больше трех раз в день).
В соответствии с изобретением предусмотрено также установление соответствия вторых показателей областям состояний другой статистических моделей на базе метода Support Vector Machine. Эта другая статистическая модель строится с временными характеристиками описанных в связи с фиг.1 вторых референтных показателей 8 в виде зависимости температура-время. Вторые показатели, которые с увеличением времени показывают увеличивающиеся температуры, лежащие на протяжении заданного периода времени выше построенной специально для этой другой статистической модели разделительной прямой температура-время, указывают на какой-либо дефект демпфера или чрезмерный износ демпфера.
На фиг.3 изображено рельсовое транспортное средство, имеющее кузов 21 вагона и ходовую часть 23. Ходовая часть 23 имеет демпфер 24, который представляет собой первичный демпфер, а также рессору 28, которая выполнена в виде первичной рессоры, технические состояния которых находятся и оцениваются посредством описанного в связи с фиг.1 предлагаемого изобретением способа.
На раме 22 ходовой части 23 предусмотрен первый сенсор 1 для измерения ускорений рамы 22 ходовой части, т.е. сенсор ускорений. Также с демпфером 24 соединен второй сенсор 2, который выполнен в виде сенсора температуры. Помимо этого, рессора 28 имеет третий сенсор 3, который выполнен в виде тензометрической полоски. Первый сенсор 1, второй сенсор 2 и третий сенсор 3 соединены сигнало- и токопроводящим образом с вычислительным блоком 10 в кузове 21 вагона.
В области крыши рельсового транспортного средства предусмотрено устройство 19 передачи данных, которое выполнено в виде беспроводного устройства, а также соединено сигнало- и токопроводящим образом с вычислительным блоком 10.
Устройство 19 передачи данных имеет также выполненное в виде блока Global Positioning System устройство локализации.
Вычислительный блок 10 через не показанную бортовую сеть рельсового транспортного средства снабжается электрическим током и, со своей стороны, снабжает электричеством первый сенсор 1, второй сенсор 2, третий сенсор 3, а также устройство 19 передачи данных.
В вычислительном блоке 10 инсталлирован компьютерный программный продукт, посредством которого непрерывно осуществляются этапы предлагаемого изобретением способа в соответствии с фиг.1, т.е. обработка 11 сигналов, определение 12 показателей, классификация 13, прогноз 14, определение 17 индикаторов, а также комбинирование 18 индикаторов.
Из индикаторов состояний, определенных в вычислительном блоке 10, который выполняет функцию устройства диагностики и контроля рельсового транспортного средства, получаются предупредительные события, которые через не показанную поездную шину рельсового транспортного средства передаются в блок отображения на также не показанном пульте машиниста рельсового транспортного средства и там выдаются в виде предупредительных указаний или статусной информации (напр., для отображения какого-либо дефекта демпфера или остаточного срока службы демпфера 24). Также индикаторы состояний через устройство 19 передачи данных посредством беспроводной связи передаются в устройство, находящееся в инфраструктуре, причем в связи с этим наглядным вариантом осуществления предлагаемого изобретением устройства речь идет о пункте технического обслуживания, для дальнейшей аналитической обработки в объеме парка транспортных средств.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
1 Первый сенсор
2 Второй сенсор
3 Третий сенсор
4 Первый сигнал
5 Второй сигнал
6 Третий сигнал
7 Первый референтный показатель
8 Второй референтный показатель
9 Третий референтный показатель
10 Вычислительный блок
11 Обработка сигналов
12 Определение показателей
13 Классификация
14 Прогноз
15 Первая статистическая модель
16 Вторая статистическая модель
17 Определение индикаторов
18 Комбинирование индикаторов
19 Устройство передачи данных
20 Передача данных
21 Кузов вагона
22 Рама ходовой части
23 Ходовая часть
24 Демпфер
25 Первая область состояний
26 Вторая область состояний
27 Разделительная прямая
28 Рессора
29 Первое функциональное значение
30 Второе функциональное значение
31 Третье функциональное значение
32 Четвертое функциональное значение
33 Система координат
PK Комбинированное значение вероятности
PDF Первый параметр
PF Второй параметр
PD Третий параметр
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИАГНОСТИКА СОСТОЯНИЯ КОЛЕС РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2696412C2 |
| СПОСОБ ДИАГНОСТИКИ ПОДВИЖНОГО СОСТАВА РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА И ПУТИ | 2024 |
|
RU2839336C1 |
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ПНЕВМАТИЧЕСКОГО ПОДРЕССОРИВАНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2505439C2 |
| СПОСОБ ТРЕКИНГА ОБЪЕКТОВ НА ЭТАПЕ РАСПОЗНАВАНИЯ ДЛЯ БЕСПИЛОТНЫХ АВТОМОБИЛЕЙ | 2022 |
|
RU2798739C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2016 |
|
RU2718181C2 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ХОДОВЫХ КАЧЕСТВ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2537354C2 |
| ИНТЕРАКТИВНАЯ ВНЕШНЯЯ СВЯЗЬ ТРАНСПОРТНОГО СРЕДСТВА С ПОЛЬЗОВАТЕЛЕМ | 2019 |
|
RU2750763C1 |
| СПОСОБ ДИАГНОСТИКИ ДЛЯ РЕЛЬСОВЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2013 |
|
RU2608992C2 |
| ТЯГОВОЕ ТРАНСПОРТНОЕ СРЕДСТВО И КОМБИНАЦИЯ ТРАНСПОРТНЫХ СРЕДСТВ И СПОСОБ УПРАВЛЕНИЯ ТЯГОВЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ И КОМБИНАЦИЕЙ ТРАНСПОРТНЫХ СРЕДСТВ | 2019 |
|
RU2755371C1 |
| Бортовой аналитический комплекс для транспортных средств | 2022 |
|
RU2787310C1 |
Техническое решение относится к средствам диагностики и контроля транспортных средств и путей движения. В способе проводятся измерения посредством по меньшей мере одного первого сенсора (1) и осуществляется обработка (11) сигналов посредством по меньшей мере одного вычислительного блока (10), в указанный по меньшей мере один вычислительный блок (10) вводятся по меньшей мере измеренные первые сигналы (4), из указанных по меньшей мере первых сигналов (4) получают по меньшей мере один первый показатель, указанный по меньшей мере первый показатель или по меньшей мере одну первую комбинацию показателей классифицируют посредством по меньшей мере одной первой статистической модели (15) или выполняют прогноз (14), определяют по меньшей мере один технический первый индикатор состояния применительно к по меньшей мере одному первому компоненту транспортного средства или по меньшей мере одному компоненту пути движения. Достигается возможность обеспечения бортовой автономной процедуры диагностики и мониторинга без задействования инфраструктуры за пределами транспортного средства. 2 н. и 20 з.п. ф-лы, 3 ил.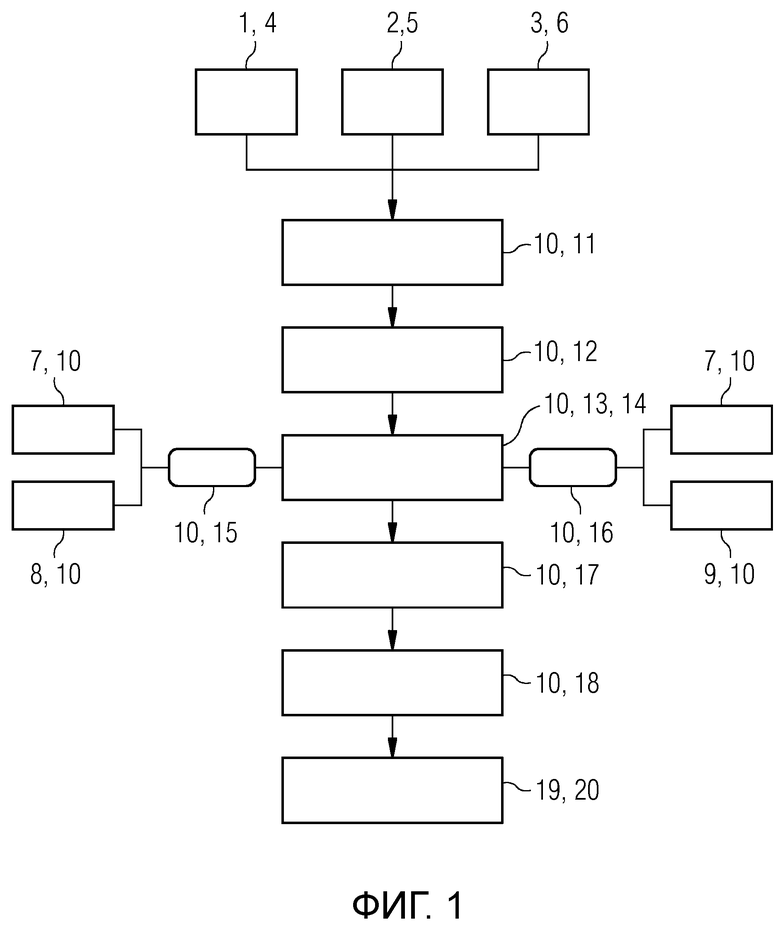
1. Способ диагностики и контроля транспортных средств, компонентов транспортных средств, путей движения, а также компонентов путей движения, в частности, для рельсовых транспортных средств и инфраструктур рельсовых транспортных средств, при этом проводят измерения посредством по меньшей мере одного первого сенсора, расположенного на ходовой части транспортного средства, и осуществляют обработку сигналов посредством по меньшей мере одного вычислительного блока, предусмотренного в транспортном средстве и соединенного с указанным по меньшей мере первым сенсором, отличающийся тем,
что в указанный по меньшей мере один вычислительный блок подают по меньшей мере измеренные первые сигналы,
что из указанных по меньшей мере первых сигналов получают по меньшей мере один первый показатель,
что указанный по меньшей мере первый показатель или по меньшей мере одну первую комбинацию показателей классифицируют посредством по меньшей мере одной первой статистической модели, воплощенной в указанном по меньшей мере одном вычислительном блоке, или выполняют прогноз, воплощенный в указанном по меньшей мере одном вычислительном блоке, на основе указанного по меньшей мере первого показателя или указанной по меньшей мере первой комбинации показателей и
что из по меньшей мере одного результата классификации или из по меньшей мере одного результата прогноза определяют по меньшей мере один технический первый индикатор состояния применительно к по меньшей мере одному первому компоненту транспортного средства или по меньшей мере одному компоненту пути движения.
2. Способ по п.1, отличающийся тем, что указанный по меньшей мере первый индикатор состояния определяют из распределения частости результатов классификации или результатов прогноза.
3. Способ по п.1 или 2, отличающийся тем, что указанный по меньшей мере первый показатель получают как статистический показатель, отнесенный к отрезку пути или отрезку времени.
4. Способ по одному из предыдущих пунктов, отличающийся тем, что указанную по меньшей мере первую статистическую модель строят посредством метода машинного обучения.
5. Способ по п.4, отличающийся тем, что указанный по меньшей мере первый показатель или указанную по меньшей мере первую комбинацию показателей классифицируют посредством метода Support Vector Machine.
6. Способ по п.4 или 5, отличающийся тем, что из референтных сигналов, обработанных во времени раньше указанных по меньшей мере первых сигналов, получают референтные показатели в качестве обучающих данных.
7. Способ по одному из пп.1-3, отличающийся тем, что указанную по меньшей мере первую статистическую модель строят на основе расчета равновесия.
8. Способ по п.7, отличающийся тем, что указанный по меньшей мере первый показатель подставляют в функцию регрессии.
9. Способ по одному из пп.1-8, отличающийся тем, что указанному по меньшей мере первому индикатору состояния присваивают первое значение вероятности наступления технического состояния, которое может индицироваться по указанному по меньшей мере одному результату классификации или указанному по меньшей мере одному результату прогноза.
10. Способ по п.9, отличающийся тем, что первый показатель вероятности получают из частости специфического результата классификации, отнесенного к общему числу результатов классификации.
11. Способ по одному из пп.1-8, отличающийся тем, что из сигналов одной-n1 категорий сигналов и найденных из них одного-n2 показателей получают один-n3 индикаторов состояний, имеющих одно-n4 значений вероятности, при этом каждому из одного-n3 индикаторов состояний присваивают одно из одного-n4 значений вероятности, и из этих одного-n4 значений вероятности получают комбинированный индикатор состояния, имеющий присвоенное ему комбинированное значение (PK) вероятности.
12. Способ по п.11, отличающийся тем, что каждое из одного-n4 значений вероятности получают из частости специфического результата классификации, отнесенного к общему числу результатов классификации.
13. Способ по п.11 или 12, отличающийся тем, что комбинированное значение (PK) вероятности получают как условную вероятность из этих одного-n4 значений вероятности.
14. Способ по одному из пп.11-13, отличающийся тем, что комбинированный индикатор состояния получают посредством пробабилистической графической модели.
15. Способ по п.14, отличающийся тем, пробабилистическую графическую модель строят на основе метода машинного обучения.
16. Способ по одному из пп.1-15, отличающийся тем, что из вторых сигналов получают по меньшей мере один второй показатель и один технический второй индикатор состояния применительно к указанному по меньшей мере первому компоненту транспортного средства.
17. Способ по одному из пп.1-15, отличающийся тем, что из вторых сигналов получают по меньшей мере один второй показатель и один технический второй индикатор состояния применительно ко второму компоненту транспортного средства.
18. Способ по одному из пп.1-17, отличающийся тем, что данные из по меньшей мере одного этапа способа вводят в собственное бортовое устройство диагностики и/или контроля транспортного средства.
19. Способ по одному из пп.1-18, отличающийся тем, что данные из по меньшей мере одного этапа способа передают в устройство, находящееся в инфраструктуре.
20. Устройство для осуществления способа по одному из пп.1-19, в котором указанный по меньшей мере первый сенсор расположен на ходовой части транспортного средства и указанный по меньшей мере один вычислительный блок предусмотрен в транспортном средстве, а также соединен с указанным по меньшей мере первым сенсором.
21. Устройство по п.20, отличающееся тем, что указанный по меньшей мере один вычислительный блок предусмотрен в кузове вагона транспортного средства.
22. Устройство по п.20 или 21, отличающееся тем, что для передачи данных в или на транспортном средстве предусмотрено по меньшей мере одно устройство передачи данных, которое соединено с указанным по меньшей мере одним вычислительным блоком.
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |

