Область техники, к которой относится изобретение
Способ относится к области диагностики технического состояния подвижного состава рельсового транспортного средства и транспортной инфраструктуры.
Уровень техники
В контексте развития современных технологий и стремления к обеспечению надежности железнодорожного транспорта и максимальной безопасности для локомотивных бригад, обслуживающего персонала и пассажиров, находящихся в пределах зоны ответственности железнодорожных операторов, наблюдается критическая необходимость создания и внедрения методов для осуществления высокоточного мониторинга, комплексной оценки и верифицированного предсказания технических состояний в режиме реального времени как для подвижных составов и их компонентов, так и путей движения и прочих критически важных элементов инфраструктуры.
Отсутствие в существующих диагностических системах дескриптивного и прогностического анализа затрудняет переход к комплексному анализу причин отказов и реализации системы, принимающей решение о возможности эксплуатации ПС, актуализируя необходимость дополнительной оснащенности подвижного состава диагностическими средствами для сбора статистических данных и анализа мультивариантных сценариев нагрузок на узлы в процессе эксплуатации.
Анализ научно-технической литературы и патентных источников позволяет выполнить сравнительную оценку технического уровня заявляемого способа и существующих технических решений и выделить ряд его отличительных особенностей.
Из существующего уровня техники известна микропроцессорная система управления и диагностики МПСУиД электропоезда (RU 2733594 C2, МПК B60L 15/32, опубл. 05.10.2020), обеспечивающая управление и диагностику работы электровоза, а также передачу данных между различными устройствами и системами, организованная на трех уровнях функциональности. На первом уровне имеются модули для измерения различных параметров, таких как ток, напряжение, счетчик электроэнергии, давление и сопротивление изоляции. Также включены подсистемы связи по линиям CAN, RS485 и Ethernet для взаимодействия с различными системами электровоза, включая двери, радиостанцию, тормозную систему, климатическую установку и систему информирования пассажиров. На втором уровне находятся монитор, блоки управления контакторами, связь с пультом управления, входные сигналы и центральный блок управления. Третий уровень включает в себя подсистемы автоведения поезда, диагностики, обеспечения безопасности движения и технологической цифровой радиосвязи.
Недостатками известного технического решения являются:
- отсутствует анализ причин отказов;
- отсутствует возможность оценки остаточного ресурса узлов ПС;
- МПСУиД электропоезда имеет ограниченные возможности в сравнении с более полной системой диагностики подвижного состава, которая включает в себя широкий спектр сенсоров и модулей для мониторинга различных аспектов работы поезда;
- заявленных средств обработки данных недостаточно для эффективного анализа больших объемов информации, что может снизить эффективность диагностики и управления;
- ограничена возможность дескриптивной и прогнозной аналитики, так как решение не включает в себя передовые технологии, такие как машинное обучение и нейронные сети.
Известен способ и устройство для диагностики и контроля транспортных средств, компонентов транспортных средств и путей движения (RU 2763414 C1, МПК B61L 15/00, опубл. 29.12.2021), заключающийся в использовании по меньшей мере одного сенсора для измерений и по меньшей мере одного вычислительного блока для обработки сигналов, в котором сигналы преобразуются в показатели, которые затем классифицируются или анализируются для прогнозирования с помощью статистических моделей, построенных на основе методов машинного обучения, что позволяет автономно диагностировать состояние транспортного средства или пути без внешней инфраструктуры, обеспечивая обнаружение повреждений и износа. Метод подразумевает адаптацию предельных значений в зависимости от условий эксплуатации для улучшения обнаружения и оценки технических состояний. Кроме того, возможно использование различных статистических моделей, включая пробабилистические графические модели, для повышения точности диагностики. Данные могут передаваться как в бортовое устройство диагностики и контроля транспортного средства, так и во внешние устройства инфраструктуры для дополнительной обработки и анализа.
Существенным недостатком известного решения в контексте обеспечения высокого уровня безопасности и надежности в рельсовом транспорте является отсутствие механизмов автоматического анализа причины возникновения дефекта и прогнозирования его развития. Кроме того, данное решение обладает следующими недостатками:
- способ не учитывает все аспекты рельсового транспорта, в связи с чем затруднена интеграция с существующими системами управления и мониторинга ПС;
- способ акцентирует внимание на статистических моделях и машинном обучении, в то время как экспертные системы и нейросетевые модели обеспечивают более глубокий и многоуровневый анализ данных;
- способ не предусматривает эффективных механизмов динамической адаптации к изменяющимся условиям эксплуатации ПС;
- в способе не заявлена оценка безопасности пространства габарита объекта мониторинга на основе видеоданных.
Известен также способ и система удаленной идентификации и прогнозирования развития зарождающихся дефектов объектов (RU 2686257 C1, МПК G05B 19/045, G05B 15/02, G06F 17/10, G06F 17/16, опубл. 24.04.2019), в котором для идентификации зарождающихся дефектов и их локализации в различных режимах работы объектов мониторинга технологических объектов используют искусственный интеллект. Система включает в себя применение различных методов непараметрического моделирования, таких как ядерная регрессия, метод опорных векторов (SVM), нечеткие логики, бустинг деревьев решений, главных компонент, нейронных сетей и методов моделирования на основе подобия, для выявления аномалий в работе объектов. Для идентификации зарождающегося дефекта и прогнозирования его развития используется нейронная сеть, обученная на сформированных цифровых классификаторах.
Указанное техническое решение имеет следующие недостатки, не позволяющие достичь результат, получаемый с использованием предлагаемого способа:
- высокая сложность реализации ввиду необходимости использования и интеграции множества различных методов непараметрического моделирования и искусственного интеллекта;
- ограниченная эффективность и возможность интеграции с существующими системами управления и мониторинга ПС в сравнении со специализированной для рельсового транспорта системой для мониторинга различных аспектов работы ПС;
- ограниченная способность к мгновенному реагированию на события в реальном времени из-за потенциальной задержки в передаче данных между нижним и верхним уровнями системы;
- способ не обеспечивает предсказания технических состояний в режиме реального времени для критически важных элементов инфраструктуры, таких как пути движения;
- в способе не заявлена оценка безопасности пространства габарита объекта мониторинга на основе видеоданных.
Раскрытие сущности изобретения
Задачей, на решение которой направлено заявляемое изобретение, является создание системы диагностики подвижного состава рельсового транспортного средства и пути в реальном времени, обеспечивающей повышение безопасности движения, эффективность эксплуатации подвижного состава и инфраструктуры, а также сокращение времени на обнаружение и устранение неисправностей.
Данная задача решается за счет того, что заявленный способ диагностики подвижного состава рельсового транспортного средства и пути в одном из предпочтительных вариантов осуществления заключается в выполнении этапов, на которых:
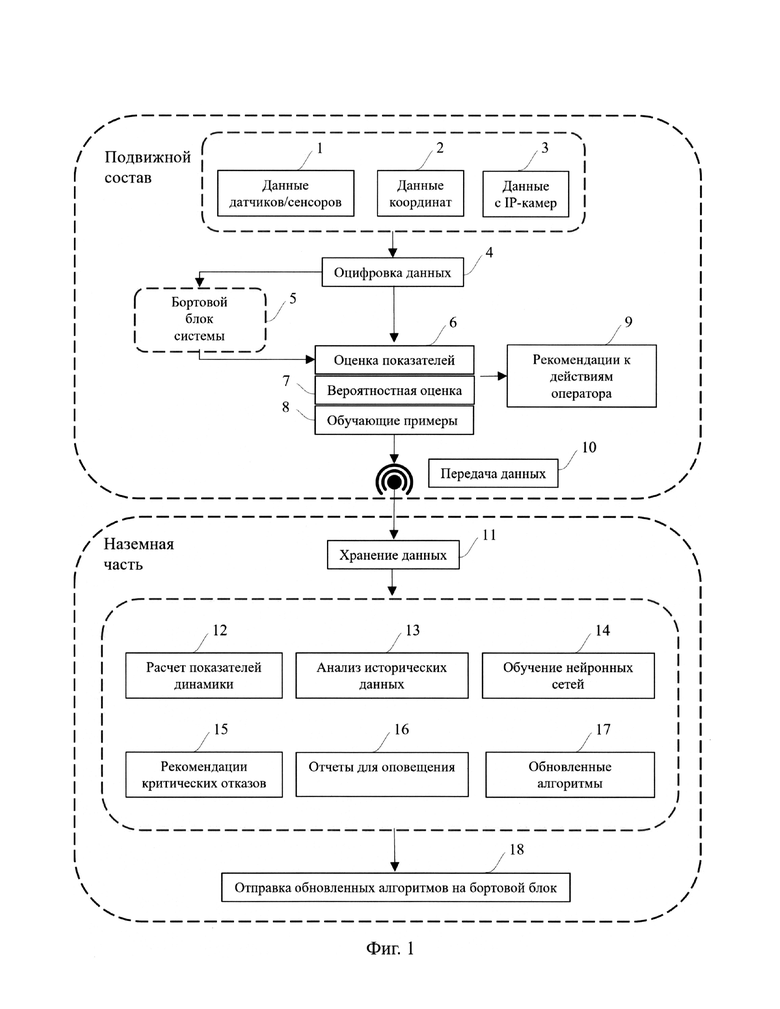
- получают данные 1 от систем управления подвижным составом (ПС), а также первичных измерительных модулей (датчиков/сенсоров), установленных на ПС;
- получают данные 2 координат в одной из систем определения координат (GPS, ГЛОНАСС и т.д.) для привязки полученных данных к положению ПС на пути;
- проводят оценку безопасности пространства габарита ПС на основании видеоданных 3, полученных от модуля видеонаблюдения;
- оцифровывают полученные данные 4 для сохранения в бортовом сервере данных и для последующей обработки и оперативной аналитики;
- обрабатывают в бортовом блоке системы 5 оцифрованные данные для определения показателей состояния ПС и пути, их привязки к положению ПС на пути и оценки безопасности пространства габарита ПС;
- проводят оценку показателей 6 состояния ПС и пути на основании эталонных моделей и алгоритмов, экспертных правил, нейросетевых моделей и критериальных таблиц соответствия;
- проводят вероятностную оценку 7 на основании по меньшей мере одного показателя с применением модели или нейронной сети на основании встроенных алгоритмов путем сравнения по меньшей мере с одним известным вариантом отклонения для данного показателя для определения отклонения технического состояния по данному показателю;
- формируют первичные обучающие примеры 8 для нейронной сети на основании результатов расчетов на эталонных моделях до достижения требуемого качества распознавания отказов на начальном этапе эксплуатации, нейронная сеть дообучается по мере накопления исторических данных с размеченными отказами с целью расширения количества детектирования отказов или уточнения условий возникновения;
- производят прогноз состояния ПС на 4 часа по результатам аналитических операций, а также вырабатывают рекомендации к действиям оператора 9;
- проводят оценку безопасности пространства габарита ПС на наличие посторонних объектов и людей с применением алгоритмов машинного зрения для предотвращения аварийных ситуаций в реальном времени;
- осуществляют передачу данных 10 результатов оценки показателей состояния ПС в наземный центр;
- осуществляют хранение данных 11 в наземном центре в хранилище для накопления исторических данных, их обработки и анализа, а также дообучения и уточнения алгоритмов, моделей бортовой аналитики;
- рассчитывают на основании полученных данных показатели динамики и взаимодействия ПС и пути 12;
- производят на основе исторических данных анализ 13 изменения состояний ПС и его взаимодействия с путем для определения и оценки развития отклонений;
- выполняют обучение нейронных сетей 14 на основе данных, полученных в результате анализа и оценки отклонений;
- формируют рекомендации 15 по критическим отказам в состоянии ПС и пути по результатам оценки данных;
- формируют отчеты 16 с результатами для оповещения диспетчера и машиниста о состоянии ПС и пути;
- формируют алгоритмы работы 17, обновленные по последним данным, и выполняют отправку алгоритмов 18 на бортовой блок на ПС.
Оперативное состояние на борту ПС может определяться на основе алгоритмов, заданных явным образом, а также нейронных сетей, которые дообучаются по мере расширения обучающих выборок.
Численные параметры и их комбинации могут оцениваться на основе соответствующих матриц отказных случаев и степеней критичности отказов, используя технологии экспертных знаний и логики.
Для каждого типа отказа могут использоваться специальные алгоритмы и нейронные сети для параллельного и оптимального вычисления параметров состояний на борту.
Для сокращения лишнего объема данных могут использовать алгоритмы свертки, редуцирования и приведения полезной информации.
В частном варианте осуществления при возникновении признаков нештатной ситуации генерируются отчетные данные с атрибутами времени, места, узла и рекомендаций оператору.
Для анализа невязок с данными эксплуатации могут использоваться модели штатной работы систем.
Расчетные невязки на моделях или условиях могут быть подвергнуты анализу на основе алгоритмов соответствия типу отказа, а также на соответствие историческим данным.
Для начальной генерации области отказов для обучения нейронных сетей, используемых на бортовой части ПС, могут использоваться модели штатной эксплуатации систем.
Для прогнозирования отказов, которые развиваются медленно (до 6 месяцев), может рассчитываться экстраполяция на будущее время на основе исторических данных о критериях отказов за предыдущее время.
Данные эксплуатации, которые позволили зафиксировать развитие и последствия отказа, могут заносить в базу данных с целью дальнейшего дообучения нейронной сети на борту.
Полученные признаки развития отказа могут оцениваться на основе матрицы отказов и ранжироваться на основе базы экспертных знаний, которую пополняют при обнаружении и определении новой аномалии.
Таким образом, способ включает в себя сбор данных от систем управления подвижным составом и различных измерительных модулей, таких как датчики и сенсоры, обработку и анализ этих данных для оценки безопасности, состояния оборудования и инфраструктуры, а также прогнозирование возможных отказов и разработку мер по предотвращению аварийных ситуаций.
Технический результатом заявленного способа является комплексный анализ состояния ПС и инфраструктуры, позволяющий оперативно реагировать на изменения в их состоянии и предотвращать возможные аварии и инциденты на железнодорожном транспорте. Применение системы, реализованной по заявленному способу, способствует повышению надежности железнодорожных путей и ПС при эксплуатации за счет непрерывной диагностики параметров.
Применяемые методы включают использование нейросетей для анализа и интерпретации данных, алгоритмы машинного обучения для прогнозирования и определения вероятных отказов, а также специализированные программные и аппаратные средства для сбора и обработки информации в реальном времени. Такой подход позволяет предсказывать события на основе сопоставления данных за прошедший и текущий период эксплуатации ПС. Прогнозирование потенциальных отказов, выводы о возможности эксплуатации и принятия решения о его движении осуществляются не только на основе непосредственного анализа текущего технического состояния объектов, но и с учетом их предыдущей эксплуатационной наработки в различных условиях функционирования.
Технология заявленного изобретения интегрирует методы статистического анализа с анализом данных, полученных в ходе эксплуатации подвижного состава и инфраструктуры рельсового транспортного средства. Для каждого объекта диагностики, будь то элемент подвижного состава или компонент инфраструктуры, определяются физические и технические процессы, оказывающие на него воздействие. Путем обработки собранных статистических данных и последующей валидации моделей на основе результатов технического обслуживания и ремонтных работ, проводимых на подвижном составе, разрабатываются точные математические модели этих процессов. Эти модели позволяют проводить расчеты и предоставлять оценки по широкому спектру характеристик и показателей состояния.
Новизна раскрываемого изобретения заключается в комплексном подходе к диагностике подвижного состава рельсового транспорта и пути, а изобретательский уровень проявляется в реализации вероятностной оценки состояния ПС и пути. Метод предиктивной аналитики, основанный на вариантных расчетах с использованием многоуровневых цифровых двойников, представляет собой передовой подход к управлению и обслуживанию подвижного состава в железнодорожной отрасли. Этот метод позволяет более точно и эффективно предсказывать события и принимать решения об эксплуатации ПС, исходя из анализа данных, собранных на разных этапах его эксплуатации.
Краткое описание чертежей (если они содержатся в заявке)
Сущность изобретения поясняется фиг. 1, отображающей основные этапы выполнения заявленного способа.
Фиг. 2 иллюстрирует блок-схему примера осуществления изобретения в одном из предпочтительных вариантов.
Осуществление изобретения
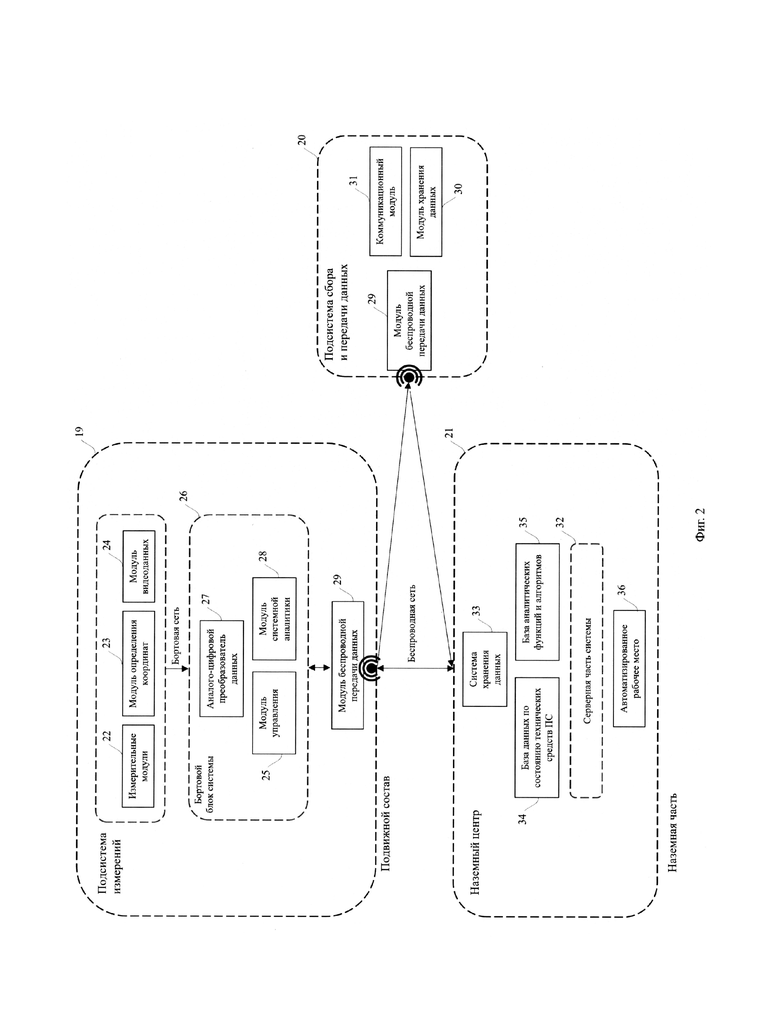
Примером осуществления изобретения в одном из предпочтительных вариантов является реализация системы диагностики подвижного состава рельсового транспортного средства и пути, которая включает в себя подсистемы измерений на подвижном составе 19 (ПИ), подсистемы сбора и передачи данных 20 (ПСПД) и наземный центр обработки данных и выработки рекомендаций 21 (НЦ).
ПИ располагается на подвижном составе (ПС), осуществляет сбор, обработку и анализ данных, на основании которых производится прогноз состояния ПС и элементов инфраструктуры на ближайшее время работы ПС (4 часа), а также осуществляет беспроводную передачу данных в НЦ в реальном времени при наличии сотовой связи. ПИ состоит из:
- измерительных модулей 22 оценочных параметров технических средств ПС (ИМ), установленных на ПС и измеряющих показатели характеристик ПС посредством датчиков тока, ускорений и акустической эмиссии;
- модуля определения координат 23 (МОК), установленного на ПС и определяющего координаты положения ПС на пути для привязки полученных данных к положению ПС на пути;
- модуля видеоданных 24 (МВД), установленного на ПС и записывающего видеоданные, анализирующего наличие препятствий, людей в габарите ПС, а также состояние инфраструктуры, и выполняющего оценку необходимости дальнейшей реакции на событие. МВД оснащен алгоритмами машинного зрения для анализа состояния инфраструктуры и выявления препятствий на пути подвижного состава для предотвращения аварийных ситуаций в реальном времени;
- модуля управления 25 (МУ), расположенного в бортовом блоке системы 26 (ББ), установленном на ПС, и управляющего работой остальных модулей ПИ, сбором данных и их хранением, передачей данных через МБПД, обеспечением электропитания остальных модулей ПИ, при этом элементы модуля, предназначенные для приема и оцифровки первичных данных (модули АЦП 27), могут располагаться как в бортовом блоке системы, так и на элементах ПС;
- модуля системной аналитики 28 (МСА), расположенного в ББ, установленном на ПС, и обеспечивающего фильтрацию и обработку первичных данных от ИМ, МОК и МВД для определения показателей состояния подвижного состава и пути, их привязки к положению ПС на пути и оценки безопасности пространства габарита ПС, выбор из базы бортовых данных и алгоритмов аналитики требуемых функций обработки и критериев, анализ данных. МСА выполнен с возможностью анализа состояния подвижного состава и инфраструктуры в реальном времени и прогнозирования возможных отказов на основе данных, полученных от ИМ, МОК и МВД, при этом анализ осуществляется с применением алгоритмов машинного обучения и нейронных сетей. Нейронная сеть на основании полученных показателей на основании встроенных алгоритмов путем сравнения с известными вариантами отклонения для данных показателей проводит вероятностную оценку для определения отклонения технического состояния по данным показателям. На основании результатов расчетов на эталонных моделях формируются первичные обучающие примеры для нейронной сети до достижения требуемого качества распознавания отказов на начальном этапе эксплуатации. По мере накопления исторических данных с размеченными отказами нейронная сеть дообучается с целью расширения количества детектирования отказов или уточнения условий возникновения. По результатам аналитических операций производится прогноз состояния ПС, вывод о состоянии ПС в режиме реального времени, а также в ближайшей перспективе развития отказов до 4 часов, информирование машиниста и диспетчера при определении критического состояния;
- модуля беспроводной передачи данных 29 (обмена информацией) (МБПД), который обеспечивает беспроводную передачу результатов оценки показателей состояния ПС в НЦ напрямую или через ПСПД и прием данных с сервера НЦ и может быть реализован в виде Wi-Fi-роутера с антенной, установленном на ПС.
ПСПД осуществляет передачу результатов оценки показателей состояния ПС с помощью известных из уровня техники беспроводной и/или наземной связи, полученных и обработанных ПИ, в НЦ при невозможности их передачи в пути следования. ПСПД характеризуется тем, что состоит из: модуля беспроводной передачи данных (обмена информацией) (МБПД), обеспечивающего прием данных с ПС и передачу данных на удаленный сервер НЦ; модуля хранения данных 30 (МХД) и коммуникационного модуля 31 (КМ), обеспечивающего взаимосвязь МБПД и МХД.
НЦ располагается удаленно и служит для приема данных от ПИ и (или) ПСПД, их хранения, обработки и анализа с прогнозированием состояния подвижного состава (ПС) и элементов инфраструктуры на длительный период работы ПС (24 часа). НЦ включает в себя серверную часть системы 32, где на основании полученных данных рассчитываются показатели динамики и взаимодействия ПС и пути, на основе исторических данных производят анализ изменения состояний ПС и его взаимодействия с путем для определения и оценки развития отклонений, на основе полученных в результате анализа и оценки данных выполняется обучение нейросетей, по результатам оценки данных формируются рекомендации по критическим отказам в состоянии ПС и пути и отчеты с результатами для оповещения диспетчера и машиниста о состоянии ПС и пути. Сформированные алгоритмы работы, обновленные по последним данным, отправляются на бортовой блок на ПС.НЦ также включает в себя:
- систему хранения данных 33 (СХД), обеспечивающую накопление исторических данных, полученных от ПИ результатов обработки и прогнозирования, а также данных для дообучения и уточнения алгоритмов, моделей бортовой аналитики;
- базу данных по состоянию технических средств ПС 34 (БД), обеспечивающую хранение данных состояний технических средств ПС и инфраструктуры;
- базу аналитических функций и алгоритмов 35 (БА), содержащую функции и алгоритмы с использованием машинного обучения и нейронных сетей, которые применяются при оценке и прогнозировании состояния ПС и инфраструктуры на основе данных, полученных от ПИ;
- автоматизированное рабочее место 36 (АРМ), обеспечивающее визуализацию отчетов, настройку и разработку новых методов проведения анализа состояний по полученным данным от ПИ.
Технический результат достигается благодаря взаимосвязанным и взаимодействующим подсистемам, каждая из которых выполняет свою роль в процессе сбора с различных датчиков, обработки поступающих сигналов, позволяющих фиксировать изменения в реальном времени, приема сигналов от видеоустройств, передачи команд на исполнительные устройства, обработки и анализа данных.
| название | год | авторы | номер документа |
|---|---|---|---|
| Бортовой аналитический комплекс для транспортных средств | 2022 |
|
RU2787310C1 |
| Способ мониторинга и предиктивной аналитики аккумуляторных батарей | 2023 |
|
RU2829034C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ КОМПЛЕКСА БОРТОВОГО ОБОРУДОВАНИЯ ВОЗДУШНЫХ СУДОВ НА ОСНОВЕ МАШИННОГО ОБУЧЕНИЯ | 2023 |
|
RU2809719C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ КОМПЛЕКСА БОРТОВОГО ОБОРУДОВАНИЯ ВОЗДУШНЫХ СУДОВ НА ОСНОВЕ МАШИННОГО ОБУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2023 |
|
RU2816667C1 |
| СПОСОБ ОЦЕНКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЖАРОВЫХ ТРУБ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2020 |
|
RU2757532C1 |
| Способ и система для предупреждения о предстоящих аномалиях в процессе бурения | 2021 |
|
RU2772851C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ВЫЯВЛЕНИЯ И ПРОГНОЗИРОВАНИЯ ОСЛОЖНЕНИЙ В ПРОЦЕССЕ СТРОИТЕЛЬСТВА НЕФТЯНЫХ И ГАЗОВЫХ СКВАЖИН | 2020 |
|
RU2745137C1 |
| УСТРОЙСТВО ТЕХНИЧЕСКОГО ДИАГНОСТИРОВАНИЯ КОМПЛЕКСА БОРТОВОГО ОБОРУДОВАНИЯ ВОЗДУШНЫХ СУДОВ НА ОСНОВЕ МАШИННОГО ОБУЧЕНИЯ | 2024 |
|
RU2831917C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ВЫЯВЛЕНИЯ И ПРОГНОЗИРОВАНИЯ ОСЛОЖНЕНИЙ В ПРОЦЕССЕ СТРОИТЕЛЬСТВА НЕФТЯНЫХ И ГАЗОВЫХ СКВАЖИН | 2020 |
|
RU2745136C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ДИАГНОСТИРОВАНИЯ ПРОМЫШЛЕННОГО ОБЪЕКТА | 2018 |
|
RU2707423C2 |
Изобретение относится к области диагностики технического состояния подвижного состава рельсового транспортного средства и транспортной инфраструктуры. Способ диагностики подвижного состава рельсового транспортного средства и пути заключается в том, что получают данные от систем управления и датчиков, размещенных на подвижном составе, определяют координаты для привязки данных к местоположению подвижного состава, производят оценку безопасности габарита подвижного состава через видеонаблюдение, оцифровывают полученные данные для сохранения и последующего анализа, обрабатывают данные для определения состояния подвижного состава и пути, проводят вероятностную оценку состояния на основе сравнения с эталонными моделями и нейросетевых моделей, а также прогнозируют состояния на ближайшие 4 часа с выработкой рекомендаций. При этом передают результаты оценки в наземный центр для дальнейшего анализа и обработки, формирования рекомендаций и отчетов, дообучения нейронных сетей по мере накопления исторических данных и обновления алгоритмов работы на основе накопленных данных. Технический результат заключается в повышении безопасности движения и эффективности эксплуатации подвижного состава, а также сокращении времени на обнаружение и устранение неисправностей. 11 з.п. ф-лы, 2 ил.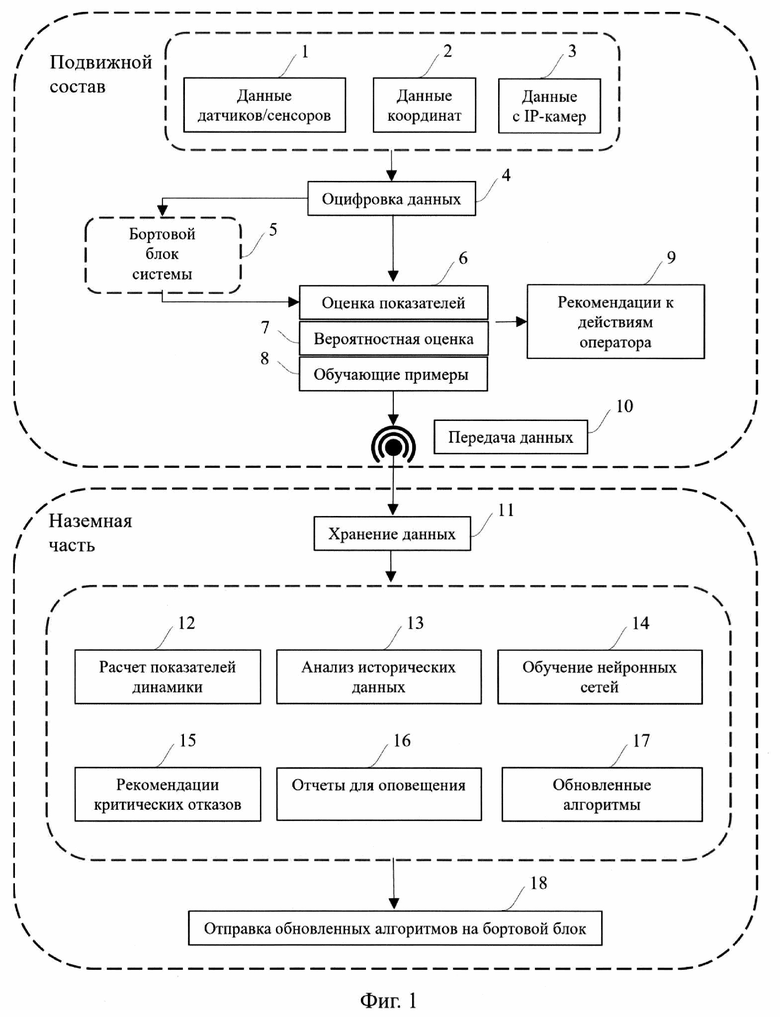
1. Способ диагностики подвижного состава рельсового транспортного средства и пути, который заключается в выполнении этапов, на которых:
- получают данные от систем управления подвижным составом (ПС), а также первичных измерительных модулей, установленных на ПС;
- получают данные координат в одной из систем определения координат для привязки полученных данных к положению ПС на пути;
- проводят оценку безопасности пространства габарита ПС на основании видеоданных, полученных от модуля видеонаблюдения;
- оцифровывают полученные данные для сохранения в бортовом сервере данных и для последующей обработки и оперативной аналитики;
- обрабатывают оцифрованные данные для определения показателей состояния ПС и пути, их привязки к положению ПС на пути и оценки безопасности пространства габарита ПС;
- проводят оценку показателей состояния ПС и пути на основании эталонных моделей и алгоритмов, экспертных правил, нейросетевых моделей и критериальных таблиц соответствия;
- проводят вероятностную оценку на основании по меньшей мере одного показателя с применением модели или нейронной сети на основании встроенных алгоритмов путём сравнения по меньшей мере с одним известным вариантом отклонения для данного показателя для определения отклонения технического состояния по данному показателю;
- формируют первичные обучающие примеры для нейронной сети на основании результатов расчетов на эталонных моделях до достижения требуемого качества распознавания отказов на начальном этапе эксплуатации, нейронная сеть дообучается по мере накопления исторических данных с размеченными отказами с целью расширения количества детектирования отказов или уточнения условий возникновения;
- производят прогноз состояния ПС на 4 часа по результатам аналитических операций, а также вырабатывают рекомендации к действиям оператора;
- проводят оценку безопасности пространства габарита ПС на наличие посторонних объектов и людей с применением алгоритмов машинного зрения для предотвращения аварийных ситуаций в реальном времени;
- передают результаты оценки показателей состояния ПС в наземный центр;
- осуществляют хранение данных в наземном центре в хранилище для накопления исторических данных, их обработки и анализа, а также дообучения и уточнения алгоритмов, моделей бортовой аналитики;
- рассчитывают на основании полученных данных показатели динамики и взаимодействия ПС и пути;
- производят на основе исторических данных анализ изменения состояний ПС и его взаимодействия с путем для определения и оценки развития отклонений;
- обучают нейронные сети на основе данных, полученных в результате анализа и оценки отклонений;
- формируют рекомендации по критическим отказам в состоянии ПС и пути по результатам оценки данных;
- формируют отчеты с результатами для оповещения диспетчера и машиниста о состоянии ПС и пути;
- формируют и отправляют на бортовой блок на ПС алгоритмы работы, обновленные по последним данным.
2. Способ по п. 1, отличающийся тем, что оперативное состояние на борту ПС определяют на основе алгоритмов, заданных явным образом, а также нейронных сетей, которые дообучаются по мере расширения обучающих выборок.
3. Способ по п. 2, отличающийся тем, что численные параметры и их комбинации оценивают на основе соответствующих матриц отказных случаев и степеней критичности отказов, используя технологии экспертных знаний и логики.
4. Способ по п. 1, отличающийся тем, что для каждого типа отказа используют специальные алгоритмы и нейронные сети для параллельного и оптимального вычисления параметров состояний на борту.
5. Способ по п. 1, отличающийся тем, что для сокращения лишнего объема данных используют алгоритмы свертки, редуцирования и приведения полезной информации.
6. Способ по п. 1, отличающийся тем, что при возникновении признаков нештатной ситуации генерируются отчетные данные с атрибутами времени, места, узла и рекомендаций оператору.
7. Способ по п. 1, отличающийся тем, что для анализа невязок с данными эксплуатации используют модели штатной работы систем.
8. Способ по п. 1, отличающийся тем, что расчетные невязки на моделях или условиях подвергают анализу на основе алгоритмов соответствия типу отказа, а также на соответствие историческим данным.
9. Способ по п. 1, отличающийся тем, что используют модели штатной эксплуатации систем для начальной генерации области отказов для обучения нейронных сетей, используемых на бортовой части ПС.
10. Способ по п. 1, отличающийся тем, что на основе исторических данных о критериях отказов за предыдущее время рассчитывают экстраполяцию на будущее время для прогнозирования отказов, которые развиваются до 6 месяцев.
11. Способ по п. 1, отличающийся тем, что данные эксплуатации, которые позволили зафиксировать развитие и последствия отказа, заносят в базу данных с целью дальнейшего дообучения нейронной сети на борту.
12. Способ по п. 1, отличающийся тем, что полученные признаки развития отказа оценивают на основе матрицы отказов и ранжируют на основе базы экспертных знаний, которую пополняют при обнаружении и определении новой аномалии.
| СПОСОБ И УСТРОЙСТВО ДЛЯ ДИАГНОСТИКИ И КОНТРОЛЯ ТРАНСПОРТНЫХ СРЕДСТВ, КОМПОНЕНТОВ ТРАНСПОРТНЫХ СРЕДСТВ И ПУТЕЙ ДВИЖЕНИЯ | 2019 |
|
RU2763414C1 |
| СПОСОБ И СИСТЕМА УДАЛЁННОЙ ИДЕНТИФИКАЦИИ И ПРОГНОЗИРОВАНИЯ РАЗВИТИЯ ЗАРОЖДАЮЩИХСЯ ДЕФЕКТОВ ОБЪЕКТОВ | 2018 |
|
RU2686257C1 |
| СПОСОБ ДИАГНОСТИКИ ДЛЯ РЕЛЬСОВЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2013 |
|
RU2608992C2 |
| ЕДИНАЯ СИСТЕМА МОНИТОРИНГА ТЕХНИЧЕСКОГО СОСТОЯНИЯ ТЯГОВОГО ПОДВИЖНОГО СОСТАВА С УДАЛЁННОЙ ПЕРЕДАЧЕЙ ДАННЫХ | 2014 |
|
RU2595817C2 |
| KR 20220094827 A, 06.07.2022. | |||

