Изобретение относится к судостроению, а именно к автономным необитаемым подводным самоходным аппаратам - планерам-глайдерам для исследования водных акваторий.
Известен подводный роботизированный комплекс «Глайдер-2.0», разработанный НИИ «Океанос», (ВМФ РФ получит новый автономный подводный беспилотник // Военное обозрение. 19 декабря 2016. https://topwar.ru/105827-vmf-rf-poluchit-novyy-avtonomnyy-podvodnyy-bespilotnik.html), содержащий торпедообразный корпус, выполненный из композитных материалов, длиной около 2,5 м, оснащенный двумя полутораметровыми крыльями. Внутри корпуса расположен мощный насос и балластная цистерна, в которую закачивается забортная вода. Полностью заполненная балластная цистерна делает «Глайдер-2.0» тяжелее, и он начинает погружаться. Когда аппарат достигает необходимой глубины, насос, питаемый от аккумуляторов, откачивает воду, опустошая балластную цистерну и аппарат становится легче, и начинает подниматься к водной поверхности. Крылья «Глайдер-2.0» позволяют ему во время каждого всплытия и погружения преодолевать некоторое расстояние по горизонтали -двигаясь вверх и внизу, он также преодолевает до 1 м на каждые 20 м вертикального движения, развивая скорость до 1 км/ч.
Относительно малая емкость аккумуляторов, определяющая основной недостаток «Глайдер-2.0», ограничивает время плавания аппарата.
Известен автономный необитаемый подводный аппарат типа глайдер (Гуренко Б.В., Назаркин А.С. Реализация и идентификация параметров автономного необитаемого подводного аппарата типа глайдер // Инженерный вестник Дона, №4. 2015.
ivdon.ru/ru/magazine/archive/n4y2015/3288), выбранный в качестве прототипа, и содержащий корпус, внутри которого механизм изменения плавучести (МИЛ), с помощью которого управляется плавучесть аппарата и обеспечивается его погружение или всплытие. МИЛ представляет собой электрическую помпу, работающую в двух режимах: закачка и выкачка, и соединенный с ней балластный мешок объемом, достаточным для закачки необходимой массы воды. В качестве балласта выступает забортная вода, поступающая в помпу по герметичным трактам. Сигнал о наполненности балластного мешка подает откалиброванный датчик давления. Внутри корпуса жестко закреплен механизм изменения центра массы аппарата, состоящий из электрического двигателя с винтовым валом, к концу которого жестко прикреплена платформа с грузом, в качестве которого выступает аккумуляторная батарея. Механизм изменения центра массы аппарата работает следующим образом: электрический двигатель вращает по часовой и против часовой стрелки винтовой вал, в результате осевого перемещения которого платформа с грузом перемещается от кормы к носу глайдера, что позволяет изменять положение его центра массы. Также внутри корпуса установлен сервопривод, управляющий рулем направления, расположенным на внешней поверхности корпуса. Еще внутри корпуса расположены радиосистема, состоящая из радиопульта и радиоприемника, предназначенная для управления глайдером в дистанционном режиме, датчик протечки для сигнализирования разгерметизации корпуса и попадании воды внутрь аппарата. Энергосистема глайдера состоит из аккумуляторной батареи питания и преобразователя напряжения для питания низковольтной электроники. За управление системами глайдера отвечает микроконтроллерный блок управления. Основным элементом блока управления является микроконтроллер, который выполняет следующие функции: прием и обработка навигационной информации от средств спутниковой (при всплытии на поверхность) и инерциальной навигации; обработка данных от датчика давления в балластном мешке и датчика протечки; обработка данных от радиоприемника и выдача управляющих воздействий; управление глайдером в автоматическом режиме по синтезированному закону управления; управление исполнительными механизмами глайдера.
Недостаток данного автономного необитаемого подводного аппарата обусловлен ограниченной емкостью аккумуляторной батареи, что в свою очередь уменьшает время плавания автономного необитаемого подводного аппарата.
Задачей настоящего изобретения - увеличение времени плавания глайдера путем использования энергии водного потока.
Технический результат достигается тем, что в глайдере, содержащем корпус, внутри которого закреплен механизм изменения плавучести, состоящий из электрической помпы, соединенной герметичными трактами с водяным балластным мешком, внутри которого жестко закреплен датчик давления, патрубок электрической помпы жестко соединен с внешней поверхностью корпуса, внутри корпуса жестко закреплены механизм изменения центра массы аппарата, состоящий из электрического двигателя с винтовым валом, к концу которого жестко прикреплена платформа с аккумуляторной батареей, и сервоприводы, управляющие рулями направления, расположенными на внешней поверхности корпуса, также внутри корпуса расположены радиоприемник, датчик протечки, первый выход аккумуляторной батареи соединен с входом преобразователя напряжения, выход которого соединен с первым входом микроконтроллерного блока управления, ко второму входу которого подключен датчик протечки, к третьему входу - радиоприемник, к четвертому входу - датчик давления, первый выход микроконтроллерного блока управления соединен с управляющим входом электрической помпы, а ее силовой вход соединен со вторым выходом аккумуляторной батареи, второй выход микроконтроллерного блока управления соединен с сервоприводами, третий выход микроконтроллерного блока управления соединен с электрическим двигателем, в корпусе выполнены вертикальные сквозные стволы, герметически изолированные от внутреннего пространства корпуса, к внутренним поверхностям стенок сквозных стволов жестко прикреплены капсульные гидрогенераторы, соединенные через зарядное устройство с входом аккумуляторной батареи, а выходные отверстия сквозных стволов снабжены подвижными люками с приводными электрическими двигателями, силовые входы которых соединены с вторым выходом аккумуляторной батареи, а их управляющие входы соединены с четвертым выходом микроконтроллерного блока управления.
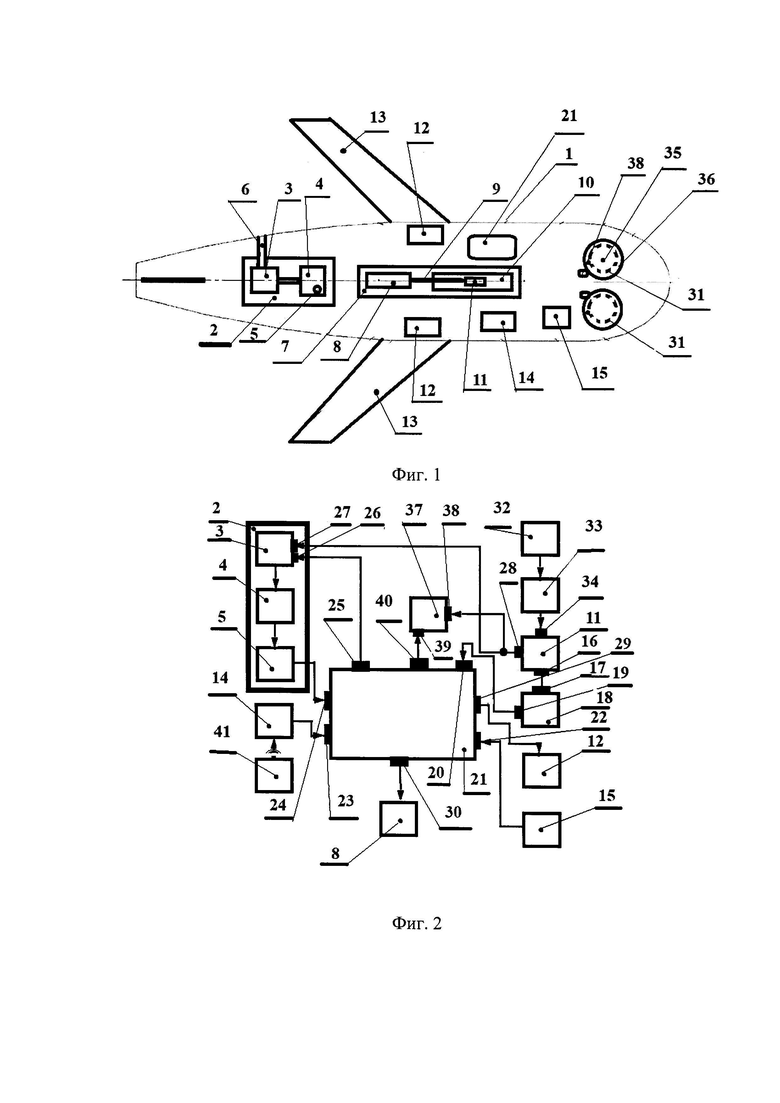
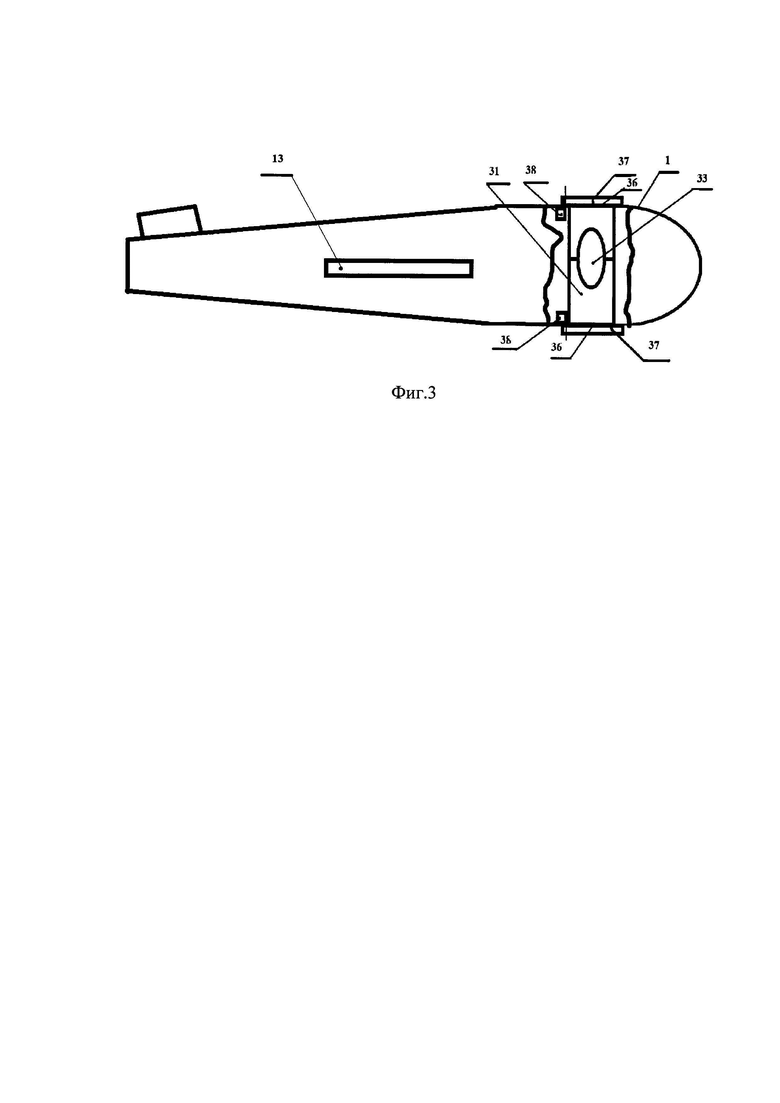
Глайдер поясняется чертежами, где на фиг. 1 показан вид сверху корпуса глайдера, на фиг. 2 приведена блок-схема глайдера, а на а на фиг. 3 дан вид сбоку корпуса глайдера с местным разрезом в носовой части корпуса.
Внутри корпуса 1 (фиг. 1), закреплен механизм изменения плавучести 2 (фиг. 2), состоящий из электрической помпы 3, например, Seaking 180L или AIKON CMS(L), или DAB VA, соединенной герметичными трактами с водяным балластным мешком 4, внутри которого жестко закреплен датчик давления 5. Электрическая помпа 3 может работать в двух направлениях: закачка забортной воды и ее выкачка. Патрубок 6 электрической помпы 3 жестко соединен с внешней поверхностью корпуса 1. Внутри корпуса 1 жестко закреплены механизм изменения центра массы аппарата 7, состоящий из электрического двигателя 8, например, коллекторный двигатель EG-530AD2B или EG-530AD-9B 9, или QX-EG-530-2 В, QX-EG-530AD2B с винтовым валом 9. К концу винтового вала 9 жестко прикреплена платформа 10 с аккумуляторной батареей 11 и сервоприводы 12, управляющие рулями 13 направления, расположенными на внешней поверхности корпуса 1. Также внутри корпуса 1 расположены радиоприемник 14 и датчик протечки 15. Первый выход 16 (фиг. 2) аккумуляторной батареи 11 электрически соединен с входом 17 преобразователя напряжения 18, выход 19 которого соединен с первым входом 20 микроконтроллерного блока управления 21, ко второму входу 22 которого подключен датчик протечки 15, к третьему входу 23 -радиоприемник 14, к четвертому входу 24 - датчик давления 5. Микроконтроллерный блок управления 21 выполнен на базе микроконтроллера, например, типа Atmega 2560 или STM32F103 или модуль RC092. Первый выход 25 микроконтроллерного блока управления 21 соединен с управляющим входом 26 электрической помпы 3, а ее силовой вход 27 соединен со вторым выходом 28 аккумуляторной батареи 11. Второй выход 29 микроконтроллерного блока управления 21 соединен с сервоприводами 12, например, HS-7955TG. Третий выход 30 микроконтроллерного блока управления 21 соединен с электрическим двигателем 8 механизма изменения центра массы аппарата 7 (фиг. 1).
В корпусе 1 (фиг. 3) выполнены вертикальные сквозные стволы 31, герметически изолированные от внутреннего пространства корпуса 1. К внутренним поверхностям стенок сквозных стволов 31 жестко прикреплены капсульные реверсивные гидрогенераторы 32 (Вольдек А.И. Электрические машины. Л.: Энергия, 1974, с. 372), соединенные через зарядное устройство 33 (фиг. 2) с входом 34 аккумуляторной батареи 11. Выходные отверстия 35 (фиг. 3) сквозных стволов 31 снабжены подвижными люками 36 с приводными электрическими двигателями 37, силовые входы 38 (фиг. 2) которых соединены вторым выходом 28 аккумуляторной батареи 11, а их управляющие входы 39 соединены с четвертым выходом 40 микроконтроллерного блока управления 21.
Пульт дистанционного управления 41 находится вне глайдера, у оператора.
Устройство работает следующим образом. Электрический ток с аккумуляторной батареи 11 поступает на электрическую помпу 3 и электрические двигатели 37. В случае погружения, если устройство работает в автоматическом режиме по синтезированному закону управления, если - в «ручном» по сигналу оператора с пульта дистанционного управления 41, приходящего на радиоприемник 14, а потом через вход 23 микроконтроллерного блока управления 21, этот блок 21 вырабатывает управляющие сигналы: один сигнал с первого выхода 25 поступает на управляющий вход 26 электрической помпы 3 и запускает последнюю на закачку забортной воды в балластный мешок 4; другой сигнал с четвертого выхода 40 идет на управляющие входы 39 электрических двигателей 37, под действием которого последние открывают крышки 35 (фиг. 3) вертикальных сквозных стволов 31; третий сигнал с выхода 30 подается на электрический двигатель 8, в результате чего винтовой вал 9 (фиг. 1) начинает вращаться и перемещать платформу 10 с аккумуляторной батареей 11 к носовой части корпуса 1. Из-за этого появляется дифферент на нос глайдера. Четвертый сигнал с второго выхода 29 микроконтроллерного блока управления 21 (фиг. 2) поступает на сервоприводы 12, которые обеспечивают требуемый угол поворота управляющих рулей 13 (фиг. 1). При полном заполнении балластного мешка 4 сигнал с датчика давления 5 приходит на четвертый вход 24 (фиг. 2) микроконтроллерного блока управления 21, который прекращает генерировать сигнал на работу электрической помпы 3.
В результате наполнения балластного мешка 4 забортной водой и изменения плавучести глайдера, происходит погружение последнего. Наклонность траектории погружения обеспечивают смещение центра масс глайдера и угол поворота управляющих рулей 13 (фиг. 1).
В процессе погружения потоки воды, проходящие через вертикальные сквозные стволы 31 (фиг. 3), обеспечивают вращение роторов гидравлических турбин, которые на чертеже не показаны, капсульных гидрогенераторов 32. В результате капсульные гидрогенераторы 32 (фиг. 2), начинают вырабатывать электрический ток, поступающий через зарядные устройства 33 на аккумуляторную батарею 11, подзаряжая ее.
Для всплытия глайдера микроконтроллерный блок управления 21 (фиг. 2) генерирует управляющий сигнал, поступающий с первого выхода 25 на управляющий вход 26 электрической помпы 3, под действием которого последняя начинает работать на откачку воды из балластного мешка 4, в результате возникает положительная плавучесть глайдера. Одновременно с этим управляющий сигнал с третьего выхода 30 микроконтроллерного блока управления 21 проходит на электрический двигатель 8, его винтовой вал 9 перемещает платформу 10 с аккумуляторной батареей 11 к корме корпуса 1, обеспечивая дифферент на корму. Форма траектории всплытия определяется поворотом управляющих рулей 13, который инициирует приход управляющего сигнала на сервоприводы 12.
В процессе всплытия потоки воды, проходящие через вертикальные сквозные стволы 31 (фиг. 3), обеспечивают реверсивное вращение роторов гидравлических турбин, которые на чертеже не показаны, капсульных гидрогенераторов 32. В результате капсульные гидрогенераторы 32 (фиг. 2), начинают вырабатывать электрический ток, поступающий через зарядные устройства 33 на аккумуляторную батарею 11, подзаряжая ее.
Следует отметить, что изменяя степень открытия входных отверстий 35 (фиг. 3) вертикальных сквозных стволов 31 крышками 36, можно регулировать время погружения или всплытия глайдера и изменять его траекторию.
В случае нарушения герметичности корпуса 1 (фиг. 1) датчик протечки 15 (фиг. 2) выдает сигнал, поступающий на второй вход 22 микроконтроллерного блока управления 21, который генерирует сигнал, проходящий через первый выход 25 на электрическую помпу 3. В результате этого начинается откачка воды из балластного мешка 4, и глайдер осуществляет аварийное всплытие.
Как можно заметить, возможность подзаряжать аккумуляторную батарею 11 во время плавания позволяет увеличить время автономного плавания глайдера.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНО-НАДВОДНЫЙ АППАРАТ ПЛАНЕРНОГО ТИПА | 2024 |
|
RU2831312C1 |
| Автономное устройство обнаружения нарушителей на морском участке границы | 2022 |
|
RU2785655C1 |
| Подводный планер-глайдер | 2021 |
|
RU2763456C1 |
| Необитаемый подводный аппарат для глубоководных погружений | 2020 |
|
RU2733190C1 |
| Подводный планер-глайдер | 2024 |
|
RU2834250C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОДВОДНОГО ПЛАНЕРА | 2018 |
|
RU2680678C1 |
| Устройство для определения места повреждения подводного кабеля | 2022 |
|
RU2791677C1 |
| ПОДВОДНЫЙ АППАРАТ В.С.ГРИГОРЧУКА | 1998 |
|
RU2131376C1 |
| ПОДВОДНО-НАДВОДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ПРОНИЦАЕМОГО ТИПА | 2000 |
|
RU2191135C2 |
| ПОДВОДНЫЙ АППАРАТ | 1998 |
|
RU2137659C1 |
Изобретение относится к судостроению, а именно к глайдерам. Микроконтроллерный блок управления 21 вырабатывает сигналы, запускающие электрическую помпу 3 на закачку забортной воды в балластный мешок 4 и электрические двигатели 37, открывающие крышки 35, электрический двигатель 8, перемещающий платформу 10 с аккумуляторной батареей 11 к носовой части корпуса 1. Сервоприводы 12 поворачивают управляющие рули 13. Из-за наполнения балластного мешка 4 забортной водой происходит погружение глайдера. Пологость траектории погружения обеспечивают смещение центра масс глайдера и угол поворота управляющих рулей 13. Потоки воды через вертикальные сквозные стволы 31 обеспечивают работу капсульных гидрогенераторов 32, которые вырабатывают ток, подзаряжающий аккумуляторную батарею 11. Для всплытия электрическая помпа 3 начинает откачивать воду из балластного мешка 4, электрический двигатель 8 перемещает платформу 10 с аккумуляторной батареей 11 к корме корпуса 1. Форма траектории всплытия определяется поворотом управляющих рулей 13 с помощью сервоприводов 12. Потоки воды через вертикальные сквозные стволы 31 обеспечивают работу капсульных гидрогенераторов 32, ток которых подзаряжает аккумуляторную батарею 11. Технический результат - увеличение времени автономного плавания. 3 ил.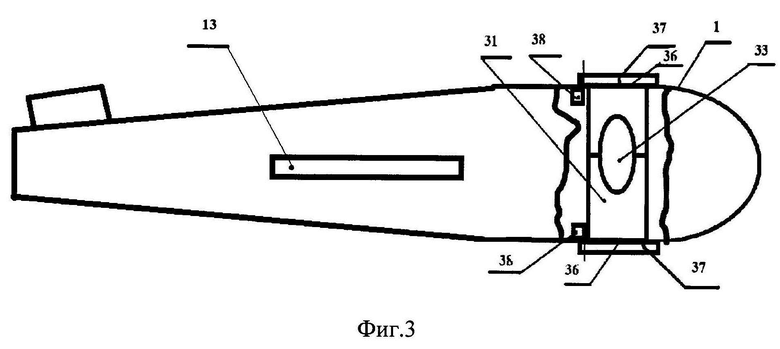
Глайдер, содержащий корпус, внутри которого закреплен механизм изменения плавучести, состоящий из электрической помпы, соединенной герметичными трактами с водяным балластным мешком, внутри которого жестко закреплен датчик давления, патрубок электрической помпы жестко соединен с внешней поверхностью корпуса, внутри корпуса жестко закреплены механизм изменения центра массы аппарата, состоящий из электрического двигателя с винтовым валом, к концу которого жестко прикреплена платформа с аккумуляторной батареей, и сервоприводы, управляющие рулями направления, расположенными на внешней поверхности корпуса, также внутри корпуса расположены радиоприемник, датчик протечки, первый выход аккумуляторной батареи соединен с входом преобразователя напряжения, выход которого соединен с первым входом микроконтроллерного блока управления, ко второму входу которого подключен датчик протечки, к третьему входу - радиоприемник, к четвертому входу - датчик давления, первый выход микроконтроллерного блока управления соединен с управляющим входом электрической помпы, а ее силовой вход соединен со вторым выходом аккумуляторной батареи, второй выход микроконтроллерного блока управления соединен с сервоприводами, третий выход микроконтроллерного блока управления соединен с электрическим двигателем, отличающийся тем, что в корпусе выполнены вертикальные сквозные стволы, герметически изолированные от внутреннего пространства корпуса, к внутренним поверхностям стенок сквозных стволов жестко прикреплены капсульные гидрогенераторы, соединенные через зарядное устройство с входом аккумуляторной батареи, а выходные отверстия сквозных стволов снабжены подвижными люками с приводными электрическими двигателями, силовые входы которых соединены со вторым выходом аккумуляторной батареи, а их управляющие входы соединены с четвертым выходом микроконтроллерного блока управления.
| Гуренко Б.В., Назаркин А.С | |||
| Реализация и идентификация параметров автономного необитаемого подводного аппарата типа глайдер | |||
| Инженерный вестник Дона | |||
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Автономное устройство обнаружения нарушителей на морском участке границы | 2022 |
|
RU2785655C1 |
| Необитаемый подводный аппарат для глубоководных погружений | 2020 |
|
RU2733190C1 |
| Подводный планер-глайдер | 2021 |
|
RU2763456C1 |
| CN 117141692 A, 01.12.2023 | |||
| CN 115503911 A, 23.12.2022. | |||
