Ссылка на родственную заявку
В заявке испрашивается приоритет на основе китайской заявки на патент № 201910146436,4, поданной в китайское патентное ведомство 27.02.2019 под заголовком "Способ и устройство регулировки дозировки разброса, беспилотный летательный аппарат и носитель информации", которая полностью включена в этот документ посредством ссылки.
Область техники, к которой относится изобретение
Изобретение относится к области беспилотных летательных аппаратов, в частности, к способу и устройству регулировки дозировки разброса, беспилотному летательному аппарату и носителю информации.
Уровень техники
С развитием технологии беспилотных летательных аппаратов, беспилотный летательный аппарат может осуществлять разброс благодаря своим преимуществам, таким как вертикальный взлет и посадка и отсутствие влияния местности.
В беспилотном летательном аппарате для защиты растений, предназначенном для разброса материалов, разбрасывающее устройство размещают на беспилотном летательном аппарате, и посредством электродвигателя приводят в движение захватывающее материал устройство, чтобы разбрасывать материал. После задания расхода на единицу площади скорость вращения электродвигателя обычно не изменяют, и беспилотный летательный аппарат разбрасывает материалы в соответствии с заданной скоростью и высотой полета, а также с заданным маршрутом полета.
Однако из-за влияния внешней среды скорость полета беспилотного летательного аппарата не может постоянно оставаться неизменной. Например, существует стадия предварительного замедления или ускорения, когда беспилотный летательный аппарат поворачивает, избегает препятствий или начинает разброс, что приводит к проблеме, заключающейся в том, что беспилотный летательный аппарат разбрасывает материалы неравномерно и не может обеспечить точный разброс.
Сущность изобретения
В вариантах осуществления изобретения предложен способ и устройство для регулировки дозировки разброса, беспилотный летательный аппарат и носитель информации, чтобы по меньшей мере решить задачи, связанные с тем, что существующий беспилотный летательный аппарат неравномерно разбрасывает материалы и может разбрасывать материалы неточно.
В первом аспекте в варианте осуществления изобретения предложен способ регулировки дозировки разброса, применяемый к беспилотному летательному аппарату для разброса с помощью захватывающего материал устройства, приводимого в движение электродвигателем. Способ включает в себя следующее:
получают команду калибровки, при этом команда калибровки включает в себя калибровочную скорость вращения и продолжительность калибровки;
управляют электродвигателем так, чтобы он работал с калибровочной скоростью вращения в течение периода калибровки для выгрузки материала, подлежащего разбросу;
получают параметры полета и фактическое количество выгружаемого материала, который необходимо разбросать, выгружаемого захватывающим материал устройством в течение периода калибровки;
определяют поправочный коэффициент между скоростью полета и скоростью вращения электродвигателя в соответствии с параметром полета и фактическим количеством выгрузки; и
в процессе разброса материала регулируют скорость вращения электродвигателя в соответствии с поправочным коэффициентом.
Как вариант, параметр полета включает в себя скорость полета, высоту полета и расход материала, который необходимо разбросать, на единицу площади, а определение поправочного коэффициента между скоростью полета и скоростью вращения электродвигателя в соответствии с параметром полета и фактическим количеством выгрузки включает в себя следующее:
определяют первый линейный коэффициент между скоростью выгрузки и скоростью вращения электродвигателя в соответствии с фактической величиной выгрузки, калибровочной скоростью вращения и продолжительностью калибровки;
определяют второй линейный коэффициент между скоростью выгрузки и скоростью полета в соответствии с высотой полета и расходом на единицу площади; и
определяют поправочный коэффициент между скоростью полета и скоростью вращения электродвигателя на основе первого линейного коэффициента и второго линейного коэффициента.
Как вариант, калибровочная скорость вращения составляет 0,5 от максимальной скорости вращения электродвигателя, и управление электродвигателем так, чтобы он работал с калибровочной скоростью вращения в течение периода калибровки для выгрузки материала, подлежащего разбросу, включает в себя следующее:
управляют электродвигателем так, чтобы он работал со скоростью, составляющей 0,5 от максимальной скорости вращения, в течение периода калибровки для выгрузки материала, подлежащего разбросу;
определение первого линейного коэффициента между скоростью выгрузки и скоростью вращения электродвигателя в соответствии с фактической величиной выгрузки, калибровочной скоростью вращения и продолжительностью калибровки включает в себя следующее:
вычисляют произведение продолжительности калибровки на 0,5-кратную максимальную скорость вращения; и
принимают в качестве первого линейного коэффициента отношение фактического количества выгрузки к произведению.
Как вариант, команда калибровки включает в себя несколько калибровочных скоростей вращения, и управление электродвигателем так, чтобы он работал с калибровочной скоростью вращения в течение периода калибровки для выгрузки материала, подлежащего разбросу, включает в себя следующее:
последовательно управляют электродвигателем так, чтобы он работал с каждой калибровочной скоростью вращения в течение периода калибровки для выгрузки материала, подлежащего разбросу.
Определение первого линейного коэффициента между скоростью выгрузки и скоростью вращения электродвигателя в соответствии с фактической величиной выгрузки, калибровочной скоростью вращения и продолжительностью калибровки включает в себя следующее:
генерируют линейную кривую скорости выгрузки и скорости вращения электродвигателя в соответствии с каждой калибровочной скоростью вращения и фактической величиной выгрузки, соответствующей каждой калибровочной скорости вращения; и
определяют первый линейный коэффициент между скоростью выгрузки и скоростью вращения электродвигателя в соответствии с линейной кривой.
Как вариант, определение второго линейного коэффициента между скоростью выгрузки и скоростью полета в соответствии с высотой полета и расходом на единицу площади включает в себя следующее:
определяют ширину разброса в соответствии с высотой полета; и
вычисляют произведение ширины разброса и расхода на единицу площади для получения второго линейного коэффициента между скоростью выгрузки и скоростью полета. Как вариант, регулировка скорости вращения электродвигателя в соответствии с поправочным коэффициентом включает в себя следующее: получают скорость полета беспилотного летательного аппарата в режиме реального времени;
вычисляют целевую скорость вращения электродвигателя в соответствии со скоростью полета в режиме реального времени и поправочным коэффициентом; и
регулируют скорость вращения электродвигателя до целевой скорости вращения для регулировки дозировки разброса материала, который необходимо разбросать.
Во втором аспекте в варианте осуществления изобретения предложено устройство регулировки дозировки разброса, применяемое к беспилотному летательному аппарату для разброса с помощью захватывающего материал устройства, приводимого в движение электродвигателем, причем устройство включает в себя один или несколько процессоров и одно или несколько запоминающих устройств для хранения программных модулей, причем процессор выполняет программный модуль, а программный модуль включает в себя:
компонент приема команды калибровки, выполненный с возможностью принимать команду калибровки, при этом команда калибровки включает в себя калибровочную скорость вращения и продолжительность калибровки;
компонент управления калибровкой, выполненный с возможностью управлять электродвигателем так, чтобы он работал с калибровочной скоростью вращения в течение периода калибровки для выгрузки материала, подлежащего разбросу;
компонент получения параметров, выполненный с возможностью получать параметры полета и фактическое количество выгружаемого материала, который необходимо разбросать, выгружаемого захватывающим материал устройством в течение периода калибровки;
компонент определения поправочного коэффициента, выполненный с возможностью определять поправочный коэффициент между скоростью полета и скоростью вращения электродвигателя в соответствии с параметром полета и фактическим количеством выгрузки; и
компонент регулирования дозировки разброса, выполненный с возможностью регулировать в процессе разброса материала скорость вращения электродвигателя в соответствии с поправочным коэффициентом.
Как вариант, параметр полета включает в себя скорость полета, ширину разброса и расход на единицу площади материала, который необходимо разбросать, а компонент определения поправочного коэффициента включает в себя:
подкомпонент определения первого линейного коэффициента, выполненный с возможностью определять первый линейный коэффициент между скоростью выгрузки и скоростью вращения электродвигателя в соответствии с фактическим количеством выгрузки, калибровочной скоростью вращения и продолжительностью калибровки;
подкомпонент определения второго линейного коэффициента, выполненный с возможностью определять второй линейный коэффициент между скоростью выгрузки и скоростью полета в соответствии с высотой полета и расходом на единицу площади; и
подкомпонент определения поправочного коэффициента, выполненный с возможностью определять поправочный коэффициент между скоростью полета и скоростью вращения электродвигателя на основе первого линейного коэффициента и второго линейного коэффициента.
Как вариант, калибровочная скорость вращения составляет 0,5 от максимальной скорости вращения электродвигателя.
Компонент управления калибровкой включает в себя:
первый подкомпонент управления, выполненный с возможностью управления электродвигателем так, чтобы он работал со скоростью, составляющей 0,5 от максимальной скорости вращения, в течение периода калибровки для выгрузки материала, подлежащего разбросу.
Подкомпонент определения первого линейного коэффициента включает в себя:
блок вычисления произведения, выполненный с возможностью вычислять произведение продолжительности калибровки на 0,5-кратную максимальную скорость вращения; и блок определения первого линейного коэффициента, выполненный с возможностью принимать отношение фактического количества выгрузки к произведению в качестве первого линейного коэффициента.
Как вариант, команда калибровки включает в себя несколько калибровочных скоростей вращения.
Компонент управления калибровкой включает в себя:
второй подкомпонент управления, выполненный с возможностью последовательно управлять электродвигателем так, чтобы он работал с каждой калибровочной скоростью вращения в течение периода калибровки для выгрузки материала, подлежащего разбросу.
Подкомпонент определения первого линейного коэффициента включает в себя:
блок подбора линейной кривой, выполненный с возможностью генерировать линейную кривую скорости выгрузки и скорости вращения электродвигателя в соответствии с каждой калибровочной скоростью вращения и фактической величиной выгрузки, соответствующей каждой калибровочной скорости вращения; и
блок определения второго линейного коэффициента, выполненный с возможностью определять первый линейный коэффициент между скоростью выгрузки и скоростью вращения электродвигателя в соответствии с линейной кривой.
Как вариант, подкомпонент определения первого линейного коэффициента включает в себя:
блок определения ширины разброса, выполненный с возможностью определять ширину разброса в соответствии с высотой полета; и
третий блок определения линейного коэффициента, выполненный с возможностью вычислять произведение ширины разброса и расхода на единицу площади для получения второго линейного коэффициента между скоростью выгрузки и скоростью полета.
Как вариант, компонент регулирования дозировки разброса включает в себя:
подкомпонент получения скорости полета в режиме реального времени, выполненный с возможностью получения скорости полета беспилотного летательного аппарата в режиме реального времени;
подкомпонент вычисления целевой скорости вращения, выполненный с возможностью вычислять целевую скорость вращения электродвигателя в соответствии со скоростью полета в режиме реального времени и поправочным коэффициентом; и
подкомпонент регулировки, выполненный с возможностью регулировать скорость вращения электродвигателя до целевой скорости вращения для регулировки дозировки разброса материала, который необходимо разбросать.
В третьем аспекте в варианте осуществления изобретения предложен беспилотный летательный аппарат. Беспилотный летательный аппарат включает в себя:
один или несколько процессоров; и
запоминающее устройство, выполненное с возможностью хранения одной или нескольких программ, при этом
когда одну или несколько программ выполняют одним или несколькими процессорами, один или несколько процессоров реализует способ регулировки дозировки разброса, заявленный в любом варианте осуществления изобретения.
В четвертом аспекте в варианте осуществления изобретения предложен машиночитаемый носитель информации, содержащий компьютерную программу, хранящуюся на нем, причем программа при выполнении ее процессором реализует способ регулировки дозировки разброса, заявленный в любом варианте осуществления изобретения.
В варианте осуществления изобретения после получения команды калибровки, включающей в себя калибровочную скорость вращения и продолжительность калибровки, электродвигателем управляют так, чтобы он работал с калибровочной скоростью вращения в течение продолжительности калибровки, чтобы выгрузить материал, который необходимо разбросать, и определяют поправочный коэффициент между скоростью полета и скоростью вращения электродвигателя в соответствии с параметром полета и фактическим количеством выгружаемого материала, который необходимо разбросать, выгруженным с помощью захватывающего материал устройства в течение продолжительности калибровки, так что скорость вращения электрического двигателя может быть отрегулирована в соответствии с поправочным коэффициентом,
чтобы регулировать дозировку разброса во время разброса материала, который необходимо разбросать. На этапе калибровки в соответствии с вариантом осуществления настоящего изобретения электродвигателем управляют так, чтобы он работал с калибровочной скоростью вращения в течение продолжительности калибровки, чтобы выгружать различные материалы, которые необходимо разбросать, тем самым получая поправочный коэффициент между скоростью полета и скоростью вращения электродвигателя, подстраивая скорость вращения электродвигателя для приведения в движение захватывающего материал устройства на разных скоростях полета беспилотного летательного аппарата для разброса различных материалов, и выполняя точный переменный разброс.
Краткое описание чертежей
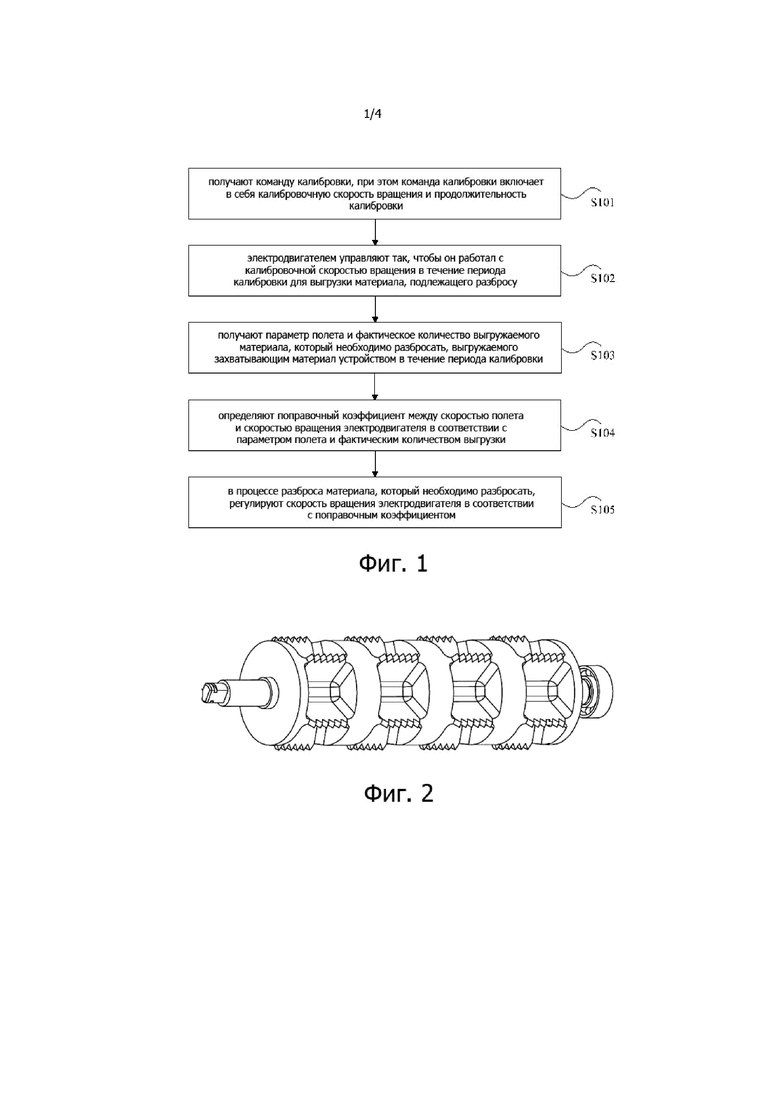
На фиг. 1 приведена блок-схема последовательности действий способа регулировки дозировки разброса, предложенного в варианте 1 осуществления изобретения;
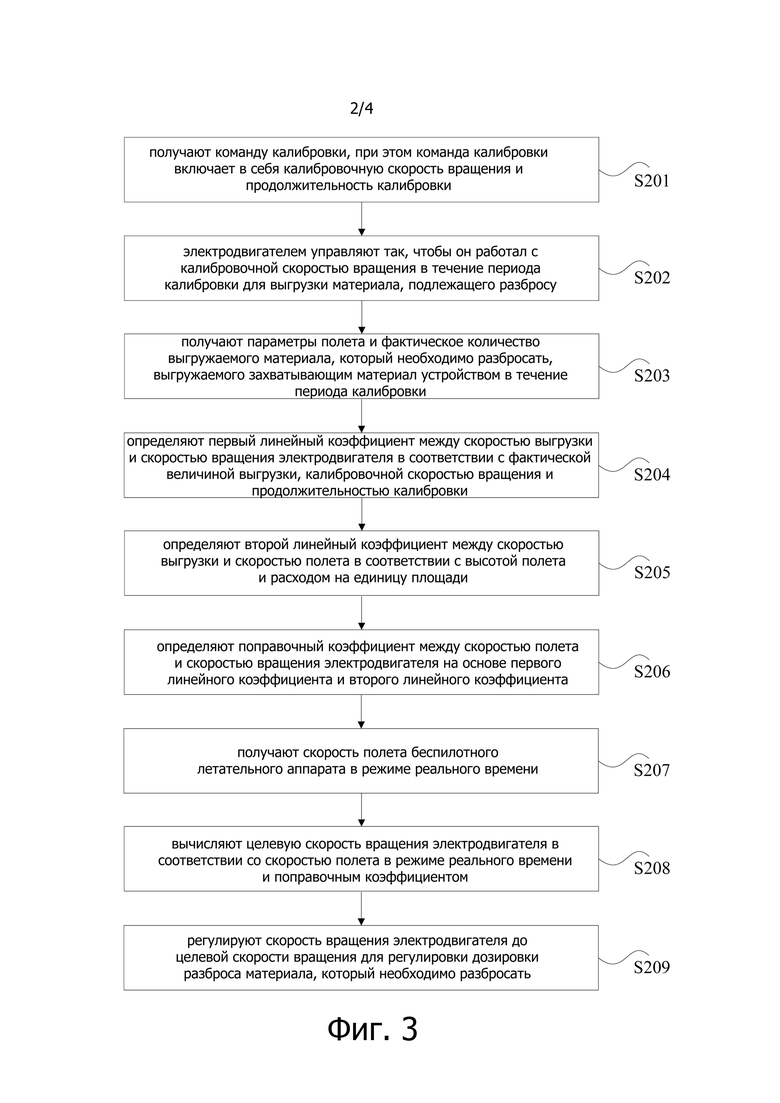
на фиг. 2 приведен схематический вид захватывающего материал устройства в соответствии с вариантом осуществления изобретения;
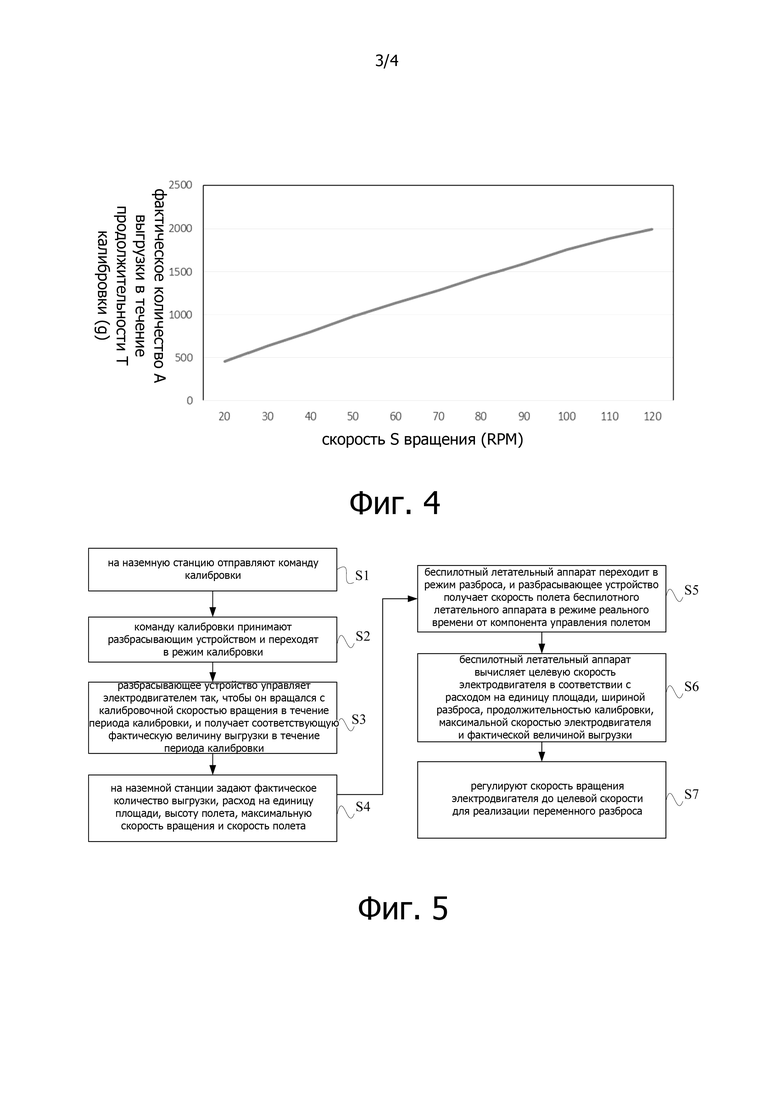
на фиг. 3 приведена блок-схема последовательности действий способа регулировки дозировки разброса, предложенного в варианте 2 осуществления изобретения;
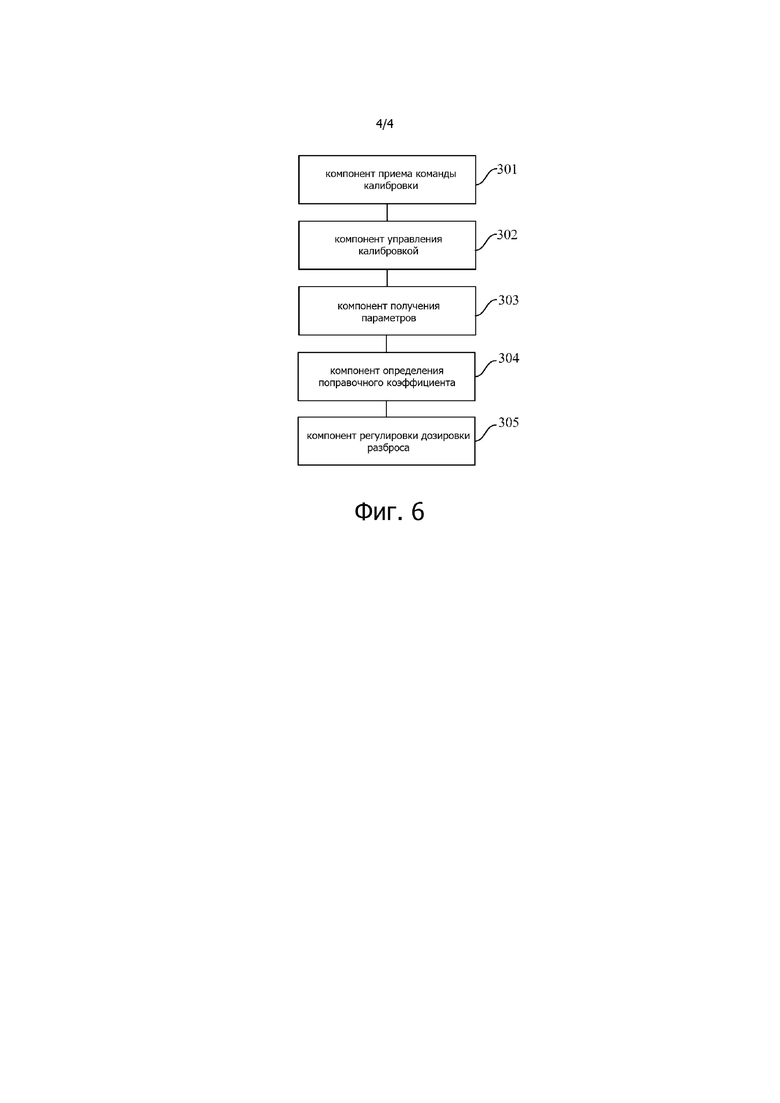
на фиг. 4 приведен схематический вид линейной зависимости между фактической величиной выгрузки и скоростью вращения электродвигателя в варианте 2 осуществления изобретения;
на фиг. 5 приведена блок-схема последовательности действий способа регулировки дозировки разброса в одном варианте осуществления изобретения; и
на фиг. 6 приведена структурная блок-схема устройства регулировки дозировки разброса, предложенного в варианте осуществления изобретения.
Подробное описание вариантов осуществления изобретения
Ниже изобретение будет подробно описано со ссылкой на сопровождающие чертежи и в сочетании с вариантами осуществления. Понятно, что определенные варианты осуществления, описанные в этом документе, приведены только для объяснения изобретения, а не для его ограничения. Кроме того, следует отметить, что для удобства описания некоторые, но не все структуры, относящиеся к изобретению, показаны только на сопроводительных чертежах.
На фиг. 1 приведена блок-схема последовательности действий способа регулировки дозировки разброса, предложенного в варианте 1 осуществления изобретения. Вариант осуществления изобретения может быть применен к ситуации, когда беспилотный летательный аппарат разбрасывает материалы. Этот способ может быть реализован с помощью устройства регулировки дозировки разброса. Это устройство может быть реализовано программно и/или аппаратно и может быть интегрировано в устройство для выполнения этого способа. Как вариант, как показано на фиг. 1, этот способ может включать в себя следующие этапы:
S101. Получают команду калибровки, при этом команда калибровки включает в себя калибровочную скорость вращения и продолжительность калибровки.
В этом варианте осуществления изобретения разбрасывающее устройство установлено на беспилотном летательном аппарате, причем разбрасывающее устройство оснащено забирающим материал устройством, приводимым в движение электродвигателем, при этом электродвигатель электрически соединен с контроллером разбрасывающего устройства, и контроллер разбрасывающего устройства подключен к компоненту управления полетом беспилотного летательного аппарата, при этом забирающее материал устройство представляет собой захватывающее материал колесо.
На фиг. 2 приведен структурный схематический вид захватывающего материал устройства в соответствии с вариантом осуществления изобретения. Захватывающее материал устройство вращается под действием электродвигателя, во время вращения захватывающего материал устройства материал, который необходимо разбросать, падает в захватывающую материал полость захватывающего материал устройства, и материал, который необходимо разбросать, выгружают из выпускного отверстия разбрасывающего устройства под действием вращения, тем самым разбрасывая материал.
В практическом применении наземная станция отправляет команду калибровки на компонент управления полетом беспилотного летательного аппарата, а разбрасывающее устройство может принимать команду калибровки от компонента управления полетом. Команда калибровки включает в себя калибровочную скорость вращения электродвигателя и продолжительность калибровки при работе с калибровочной скоростью вращения, где калибровочная скорость вращения может представлять собой скорость вращения, выбранную при калибровке электродвигателя, причем электродвигатель приводят во вращение на калибровочной скорости вращения для выгрузки материала, который необходимо разбросать, а продолжительность калибровки может представлять собой продолжительность работы на калибровочной скорости вращения электродвигателя во время калибровки.
S102. Электродвигателем управляют так, чтобы он работал с калибровочной скоростью вращения в течение периода калибровки для выгрузки материала, подлежащего разбросу.
Как вариант, разбрасывающее устройство, установленное на беспилотном летательном аппарате, снабжено бункером для материала, в который заранее может быть загружен материал, который необходимо разбросать. После получения команды калибровки разбрасывающее устройство управляет электродвигателем так, чтобы он работал с калибровочной скоростью и выгружал материал, который необходимо разбросать, в бункер для материала в течение периода калибровки.
S103. Получают параметр полета и фактическое количество выгружаемого материала, который необходимо разбросать, выгружаемого захватывающим материал устройством в течение периода калибровки.
В практическом применении после каждого завершения калибровки выгрузки разбрасывающим устройством, выгруженные материалы, которые необходимо разбросать, можно каждый раз взвесить, чтобы получить фактическое количество выгрузки для калибровки, причем фактическое количество выгрузки и параметры полета подают на наземную станцию и передают на компонент управления полетом беспилотного летательного аппарата через наземную станцию, и разбрасывающее устройство может получать параметры полета и фактическое количество выгрузки от компонента управления полетом.
S104. Определяют поправочный коэффициент между скоростью полета и скоростью вращения электродвигателя в соответствии с параметром полета и фактическим количеством выгрузки.
В этом варианте осуществления изобретения параметр полета может включать в себя скорость полета, высоту полета и расход разбрасываемого материала на единицу площади, среди которых скорость полета может представлять собой скорость полета, когда беспилотный летательный аппарат разбрасывает материал, высота полета может представлять собой высоту от земли беспилотного летательного аппарата для обеспечения неизменной ширины разброса, а расход на единицу площади может представлять собой вес материала, который необходимо разбросать, на единицу площади. Поправочный коэффициент может представлять собой поправочный коэффициент для регулирования скорости вращения электродвигателя в соответствии со скоростью полета, когда скорость полета изменяется из-за внешнего фактора. Скорость вращения электродвигателя, соответствующая скорости полета, может быть динамически отрегулирована с помощью поправочного коэффициента.
Поправочный коэффициент этого варианта осуществления может быть определен через скорость полета, высоту полета, расход на единицу площади материала, который необходимо разбросать, и фактическую величину выгрузки. Как вариант, сначала определяют первый линейный коэффициент между скоростью выгрузки и скоростью вращения электродвигателя в соответствии с фактическим количеством выгрузки, продолжительностью калибровки и калибровочной скоростью вращения, среди которых скорость выгрузки представляет собой вес материала для разброса, выгружаемого забирающим материал устройством в единицу времени. Как вариант, первый линейный коэффициент равен отношению фактической величины выгрузки к произведению продолжительности калибровки и калибровочной скорости вращения. Первый линейный коэффициент может динамически регулировать скорость выгрузки захватывающего материал устройства при изменении скорости вращения электродвигателя, то есть вес материала, который необходимо разбросать, который может быть выгружен каждую секунду при вращении электродвигателя. Затем, может быть определен второй линейный коэффициент между скоростью выгрузки и скоростью полета в соответствии с высотой полета и расходом на единицу площади. Как вариант, второй линейный коэффициент равен произведению ширины разброса и расхода на единицу площади. Наконец, первый линейный коэффициент и второй линейный коэффициент могут быть использованы для определения поправочного коэффициента. Как вариант, скорость выгрузки равна произведению первого линейного коэффициента и скорости вращения электродвигателя, и скорость выгрузки также равна произведению второго линейного коэффициента и скорости полета. В сочетании с соответствующими параметрами вычисления первого линейного коэффициента и второго линейного коэффициента может быть получен поправочный коэффициент между скоростью электродвигателя и скоростью полета.
S105. В процессе разброса материала регулируют скорость вращения электродвигателя в соответствии с поправочным коэффициентом.
Как вариант, во время процесса разброса разбрасывающее устройство получает скорость полета беспилотного летательного аппарата в режиме реального времени от компонента управления полетом, вычисляет целевую скорость электродвигателя в соответствии с поправочным коэффициентом и скоростью полета в режиме реального времени, и затем управляет электродвигателем так, чтобы он работал с заданной скоростью, чтобы приводить в движение захватывающее материал устройство, для захвата материала, тем самым, реализуя регулировку дозировки разбрасываемого материала.
На этапе калибровки в соответствии с вариантом осуществления настоящего изобретения электродвигателем управляют так, чтобы он работал с калибровочной скоростью вращения в течение продолжительности калибровки, чтобы выгружать различные материалы, которые необходимо разбросать, тем самым получая поправочный коэффициент между скоростью полета и скоростью вращения электродвигателя, когда беспилотный летательный аппарат разбрасывает различные материалы, которые необходимо разбросать, подстраивая скорость вращения электродвигателя для приведения в движение захватывающего материал устройства на разных скоростях полета для разброса различных материалов, и выполняя точный переменный разброс.
На фиг. 3 приведена блок-схема последовательности действий способа регулировки дозировки разброса, предложенного в варианте 2 осуществления изобретения. Этот вариант осуществления изобретения оптимизирован на основе варианта 1 осуществления, приведенного выше. Как вариант, как показано на фиг. 3, способ регулировки дозировки разброса в этом варианте осуществления изобретения может включать в себя следующие этапы:
S201. Получают команду калибровки, при этом команда калибровки включает в себя калибровочную скорость вращения и продолжительность калибровки.
S202. Электродвигателем управляют так, чтобы он работал с калибровочной скоростью вращения в течение периода калибровки для выгрузки материала, подлежащего разбросу.
В опциональном варианте осуществления изобретения имеет место линейная зависимость между скоростью вращения электродвигателя и скоростью выгрузки, которая представляет различную линейную зависимость в разных диапазонах скорости вращения. Например, при низкой скорости вращения электродвигатель имеет большой момент нагрузки, электродвигатель вращается медленно, материал, который необходимо разбросать, быстро заполняет полость, принимающую материал, и увеличение скорости вращения электродвигателя может привести к быстрому увеличению скорости выгрузки. В то время как при высокой скорости вращения электродвигатель вращается быстро, полость, принимающая материал, медленно заполняется материалом, который необходимо разбросать, а увеличение скорости вращения электродвигателя приводит к медленному увеличению скорости выгрузки. Предпочтительно, калибровочная скорость вращения может быть установлена равной 0,5 от максимальной скорости вращения электродвигателя, и электродвигателем могут управляться так, чтобы он работал со скоростью, равной 0,5 от максимальной скорости вращения, в течение продолжительности калибровки, чтобы приводить в движение захватывающее материал устройство для выгрузки материала, который необходимо разбросать, так что за счет калибровки может быть увеличена точность разброса при промежуточной скорости вращения. В таком случае имеет место линейная зависимость между скоростью вращения электродвигателя и скоростью выгрузки материала, который необходимо разбросать. Например, если максимальная скорость вращения электродвигателя составляет 170 об/мин, то калибровочная скорость вращения может быть установлена на уровне 85 об/мин. Конечно, при реализации варианта осуществления изобретения специалисты в данной области техники могут также установить другие кратные максимальной скорости вращения электродвигателя для работы и калибровки, которые могут быть, в частности, определены в соответствии с размером и типом разбрасываемого материала, если только гарантируется, что имеет место линейная зависимость между скоростью вращения электродвигателя и скоростью выгрузки материала, который необходимо разбросать в это время. Вариант осуществления изобретения не ограничивает значение калибровочной скорости вращения.
В другом варианте осуществления изобретения также возможно выбрать несколько различных калибровочных скоростей вращения для калибровки на наземной станции. Например, если команда калибровки включает в себя несколько калибровочных скоростей вращения, то электродвигателем могут последовательно управлять так, чтобы он работал на каждой калибровочной скорости вращения в течение продолжительности калибровки, чтобы выгрузить материал, который необходимо разбросать, и получают фактическую величину выгрузки при работе на нескольких различных калибровочных скоростях вращения.
S203. Получают параметры полета и фактическое количество выгружаемого материала, который необходимо разбросать, выгружаемого захватывающим материал устройством в течение периода калибровки.
Как вариант, в этом варианте осуществления параметр полета и фактическая величина выгрузки, вводимые с наземной станции, могут быть получены от компонента управления полетом. Параметр полета может включать в себя скорость полета, высоту полета и расход на единицу площади материала, который необходимо разбросать, а фактическая величина выгрузки может представлять собой фактическую величину выгрузки, когда электродвигатель работает со скоростью, равной 0,5 от максимальной скорости вращения, или фактическую величину выгрузки, когда электродвигатель работает на нескольких различных калибровочных скоростях вращения.
S204. Определяют первый линейный коэффициент между скоростью выгрузки и скоростью вращения электродвигателя в соответствии с фактической величиной выгрузки, калибровочной скоростью вращения и продолжительностью калибровки.
В этом варианте осуществления изобретения, когда электродвигатель работает со скоростью, равной 0,5 от максимальной скорости вращения для калибровки, первый линейный коэффициент между скоростью выгрузки и скоростью вращения электродвигателя может быть определен в соответствии с фактическим количеством выгрузки, калибровочной скоростью вращения и продолжительностью калибровки. Как вариант, первый линейный коэффициент может быть определен по следующей формуле (1):
где Smid - это калибровочная скорость вращения, которая может составлять 0,5 от максимальной скорости электродвигателя, A - фактическая величина выгрузки в случае, когда электродвигатель работает с калибровочной скоростью вращения Smid в течение продолжительности T калибровки, Aυ - это скорость выгрузки, а S - скорость вращения электродвигателя, так что первый линейный коэффициент между скоростью Aυ выгрузки и скоростью S электродвигателя равен 
Когда выполняют калибровку на нескольких различных калибровочных скоростях вращения, линейная кривая между скоростью выгрузки и скоростью вращения электродвигателя может быть сгенерирована в соответствии с каждой калибровочной скоростью вращения и фактической величиной выгрузки, соответствующей каждой калибровочной скорости вращения, и тогда первый линейный коэффициент между скоростью выгрузки и скоростью вращения электродвигателя может быть определен в соответствии с линейной кривой. На фиг. 4 приведен схематический вид линейной зависимости между фактической величиной выгрузки и скоростью вращения электродвигателя в варианте 2 осуществления изобретения. Как показано на фиг. 4, координаты точек, соответствующих различным калибровочным скоростям вращения, и соответствующие им фактические величины выгрузки добавляют в двумерных координатах фактического количества A выгрузки и скорости S вращения электродвигателя, а затем предварительно добавляют заданное количество интерполированных точек координат с использованием алгоритма интерполяции, и каждую координатную точку аппроксимируют для получения линейной кривой, поэтому первый линейный коэффициент может быть определен в соответствии с линейной кривой. Например, может быть вычислен угловой коэффициент точки, соответствующей скорости вращения, на линейной кривой, и затем угловой коэффициент может быть задан в качестве первого вышеупомянутого линейного коэффициента.
S205. Определяют второй линейный коэффициент между скоростью выгрузки и скоростью полета в соответствии с высотой полета и расходом на единицу площади.
В практическом применении материал, который необходимо разбросать, выдувают на землю из разбрасывающего устройства через выдувной элемент. Если скорость воздушного потока выдувного элемента фиксирована, то начальная скорость материала, который необходимо разбросать, из разбрасывающего устройства будет фиксированной. В то же время, из-за фиксированной высоты полета беспилотного летательного аппарата диапазон разбрасываемого материала, падающего с фиксированной высоты с фиксированной начальной скоростью, также фиксирован, то есть ширина разброса материала, который необходимо разбросать, является фиксированной, поэтому может быть получена следующая формула (2), поскольку расход на единицу площади равно отношению количества разброса в единицу времени к площади разброса в единицу времени:
где Aυ - скорость выгрузки, t - время полета, W - ширина разброса, V - скорость полета, D - расход на единицу площади, Aυ×t - величина разброса за время t полета, а W×V×t - площадь разброса за время полета t.
Следующая формула (3) может быть получена из формулы (2):

То есть второй линейный коэффициент между скоростью Aυ выгрузки и скоростью V полета равен W×D.
S206. Определяют поправочный коэффициент между скоростью полета и скоростью вращения электродвигателя на основе первого линейного коэффициента и второго линейного коэффициента.
Как вариант, для одного и того же материала, который необходимо разбросать, скорость Aυ выгрузки должна быть одинаковой, и выражение зависимости между скоростью вращения электродвигателя и скоростью полета может быть получено из формулы (1) и формулы (3) следующим образом (4):
где 
S207. Получают скорость полета беспилотного летательного аппарата в режиме реального времени.
В процессе разброса материала беспилотным летательным аппаратом в соответствии с заданным маршрутом полета разбрасывающее устройство может получать скорость полета беспилотного летательного аппарата в режиме реального времени от компонента управления полетом.
S208. Вычисляют целевую скорость вращения электродвигателя в соответствии со скоростью полета в режиме реального времени и поправочным коэффициентом.
Как вариант, поскольку компонент управления полетом принимает заданный расход D на единицу площади, калибровочную скорость Smid вращения, продолжительность T калибровки, фактическую величину A выгрузки и высоту полета от наземной станции, то может быть определена ширина W разброса в соответствии с предварительно заданной таблицей соответствия между высотой полета и шириной разброса, при этом одновременно может быть получена максимальная скорость вращения электродвигателя разбрасывающего устройства для определения калибровочной скорости Smid вращения, так что целевую скорость вращения электродвигателя можно рассчитать по формуле (4).
S209. Регулируют скорость вращения электродвигателя до целевой скорости вращения для регулировки дозировки разброса материала, который необходимо разбросать.
Если текущая скорость вращения электродвигателя не соответствует целевой скорости вращения, то текущую скорость вращения электродвигателя регулируют до целевой скорости вращения, так что может быть реализована регулировка дозировки разброса в режиме реального времени. Как вариант, может быть вычислена разница между текущей скоростью вращения и целевой скоростью вращения. Если абсолютное значение разницы больше, чем предварительно заданное значение, то текущую скорость вращения электродвигателя регулируют до целевой скорости вращения, что может избежать проблемы частой регулировки скорости вращения электродвигателя, вызванной частыми колебаниями скорости полета.
Чтобы вариант осуществления изобретения был понятнее специалистам в данной области техники, вариант осуществления изобретения будет описан ниже в сочетании с фиг. 5 и примерами:
На фиг. 5 приведена блок-схема последовательности действий способа регулировки дозировки разброса в одном варианте осуществления изобретения. Как показано на фиг. 5, способ регулировки дозировки разброса в этом примере включает в себя следующее:
S1, на наземную станцию отправляют команду калибровки.
Как вариант, после того, как наземная станция вводит калибровочную скорость вращения и продолжительность калибровки, генерируют команду калибровки, и команду калибровки отправляют в компонент управления полетом.
S2, команду калибровки принимают разбрасывающим устройством и переходят в режим калибровки.
Например, разбрасывающее устройство принимает команду калибровки от подключенного к нему компонента управления полетом, и запускает режим калибровки.
S3, разбрасывающее устройство управляет электродвигателем так, чтобы он вращался с калибровочной скоростью вращения в течение периода калибровки, и получает соответствующую фактическую величину выгрузки в течение периода калибровки.
S4, на наземной станции задают фактическое количество выгрузки, расход на единицу площади, высоту полета, максимальную скорость вращения и скорость полета.
То есть на наземной станции вводят расход на единицу площади материала, который необходимо разбросать, высоту полета (ширину разброса можно определить в соответствии с высотой полета), максимальную скорость вращения электродвигателя, а также фактическую величину выгрузки и скорость полета во время калибровки.
S5, беспилотный летательный аппарат переходит в режим разброса, и разбрасывающее устройство получает скорость полета беспилотного летательного аппарата в режиме реального времени от компонента управления полетом.
S6, беспилотный летательный аппарат вычисляет целевую скорость электродвигателя в соответствии с расходом на единицу площади, шириной разброса, продолжительностью калибровки, максимальной скоростью электродвигателя и фактической величиной выгрузки.
В частности, целевая скорость, соответствующая скорости полета в режиме реального времени, может быть вычислена в соответствии с формулой (4) в варианте 2 осуществления.
S7, регулируют скорость вращения электродвигателя до целевой скорости для реализации переменного разброса.
На этапе калибровки в соответствии с вариантом осуществления настоящего изобретения электродвигателем управляют так, чтобы он работал с калибровочной скоростью вращения в течение продолжительности калибровки, чтобы выгружать различные материалы, которые необходимо разбросать, тем самым получая поправочный коэффициент между скоростью полета и скоростью вращения электродвигателя, когда разбрасывают различные материалы, которые необходимо разбросать, подстраивая скорость вращения электродвигателя для приведения в движение захватывающего материал устройства на разных скоростях полета для разброса различных материалов, и выполняя точный переменный разброс.
В варианте осуществления настоящего изобретения предложено устройство регулировки дозировки разброса. Устройство регулировки дозировки разброса включает в себя один или несколько процессоров и одно или несколько запоминающих устройств для хранения программных модулей, среди которых программный модуль выполняют процессором, и программный модуль включает в себя компонент приема команды калибровки, компонент управления калибровкой, компонент получения параметров, компонент определения поправочного коэффициента и компонент регулировки разброса.
На фиг. 6 приведена структурная блок-схема устройства регулировки дозировки разброса в соответствии с вариантом осуществления изобретения. Как показано на фиг. 6, устройство регулировки дозировки разброса применяют к беспилотному летательному аппарату для разброса с использованием захватывающего материал устройства, приводимого в движение электродвигателем, и, в частности, включает в себя компонент 301 приема команды калибровки, компонент 302 управления калибровкой, компонент 303 получения параметров, компонент 304 определения поправочного коэффициента и компонент 305 регулировки разброса.
Компонент 301 приема команды калибровки выполнен с возможностью принимать команду калибровки, при этом команда калибровки включает в себя калибровочную скорость вращения и продолжительность калибровки;
компонент 302 управления калибровкой выполнен с возможностью управлять электродвигателем так, чтобы он работал с калибровочной скоростью вращения в течение периода калибровки для выгрузки материала, подлежащего разбросу;
компонент 303 получения параметров выполнен с возможностью получать параметры полета и фактическое количество выгружаемого материала, который необходимо разбросать, выгружаемого захватывающим материал устройством в течение периода калибровки;
компонент 304 определения поправочного коэффициента выполнен с возможностью определять поправочный коэффициент между скоростью полета и скоростью вращения электродвигателя в соответствии с параметром полета и фактическим количеством выгрузки; и
компонент 305 регулирования дозировки разброса выполнен с возможностью регулировать в процессе разброса материала скорость вращения электродвигателя в соответствии с поправочным коэффициентом.
Как вариант, параметр полета включает в себя скорость полета, ширину разброса и расход на единицу площади материала, который необходимо разбросать, а компонент 304 определения поправочного коэффициента включает в себя:
подкомпонент определения первого линейного коэффициента, выполненный с возможностью определять первый линейный коэффициент между скоростью выгрузки и скоростью вращения электродвигателя в соответствии с фактической величиной выгрузки, калибровочной скоростью вращения и продолжительностью калибровки;
подкомпонент определения второго линейного коэффициента, выполненный с возможностью определять второй линейный коэффициент между скоростью выгрузки и скоростью полета в соответствии с высотой полета и расходом на единицу площади; и
подкомпонент определения поправочного коэффициента, выполненный с возможностью определять поправочный коэффициент между скоростью полета и скоростью вращения электродвигателя на основе первого линейного коэффициента и второго линейного коэффициента.
Как вариант, калибровочная скорость вращения составляет 0,5 от максимальной скорости вращения электродвигателя.
Компонент 302 управления калибровкой включает в себя:
первый подкомпонент управления, выполненный с возможностью управления электродвигателем так, чтобы он работал со скоростью, составляющей 0,5 от максимальной скорости вращения, в течение периода калибровки для выгрузки материала, подлежащего разбросу.
Подкомпонент определения первого линейного коэффициента включает в себя:
блок вычисления произведения, выполненный с возможностью вычислять произведение продолжительности калибровки на 0,5-кратную максимальную скорость вращения; и блок определения первого линейного коэффициента, выполненный с возможностью принимать отношение фактического количества выгрузки к произведению в качестве первого линейного коэффициента.
Как вариант, команда калибровки включает в себя несколько калибровочных скоростей вращения.
Компонент 302 управления калибровкой включает в себя:
второй подкомпонент управления, выполненный с возможностью последовательно управлять электродвигателем так, чтобы он работал с каждой калибровочной скоростью вращения в течение периода калибровки для выгрузки материала, подлежащего разбросу.
Подкомпонент определения первого линейного коэффициента включает в себя:
блок подбора линейной кривой, выполненный с возможностью генерировать линейную кривую скорости выгрузки и скорости вращения электродвигателя в соответствии с каждой калибровочной скоростью вращения и фактической величиной выгрузки, соответствующей каждой калибровочной скорости вращения; и
блок определения второго линейного коэффициента, выполненный с возможностью определять первый линейный коэффициент между скоростью выгрузки и скоростью вращения электродвигателя в соответствии с линейной кривой.
Как вариант, подкомпонент определения первого линейного коэффициента включает в себя:
блок определения ширины разброса, выполненный с возможностью определять ширину разброса в соответствии с высотой полета; и
третий блок определения линейного коэффициента, выполненный с возможностью вычислять произведение ширины разброса и расхода на единицу площади для получения второго линейного коэффициента между скоростью выгрузки и скоростью полета.
Как вариант, компонент 305 регулировки дозировки разброса включает в себя:
подкомпонент получения скорости полета в режиме реального времени, выполненный с возможностью получения скорости полета беспилотного летательного аппарата в режиме реального времени;
подкомпонент вычисления целевой скорости вращения, выполненный с возможностью вычислять целевую скорость вращения электродвигателя в соответствии со скоростью полета в режиме реального времени и поправочным коэффициентом; и
подкомпонент регулировки, выполненный с возможностью регулировать скорость вращения электродвигателя до целевой скорости вращения для регулировки дозировки материала, который необходимо разбросать.
Устройство регулировки дозировки разброса, предложенное в варианте осуществления настоящего изобретения, может выполнять способ регулировки дозировки разброса, предложенный в любом варианте осуществления настоящего изобретения, и имеет соответствующие функциональные компоненты и положительные эффекты при выполнении этого способа.
В варианте осуществления изобретения также предложен беспилотный летательный аппарат. Беспилотный летательный аппарат включает в себя один или несколько процессоров и запоминающее устройство, которое выполнено с возможностью хранения одной или нескольких программ. Когда одну или несколько программ выполняют одним или несколькими процессорами, один или несколько процессоров может реализовывать способ регулировки дозировки разброса в соответствии с любым вариантом осуществления изобретения.
В варианте осуществления изобретения также предложен машиночитаемый носитель информации. Выполнение процессором устройства команды, сохраненной на носителе информации, позволяет устройству выполнять способ регулировки дозировки разброса, как описано в вышеприведенном варианте осуществления способа.
Каждый функциональный компонент, предусмотренный вариантом осуществления настоящего изобретения, может быть запущен в устройстве регулировки дозировки разброса или аналогичном вычислительном устройстве, а также может храниться как часть носителя информации.
Специалистам в данной области техники понятно, что полные или частичные этапы в различных способах вышеупомянутых вариантов осуществления могут быть выполнены путем подачи команд на соответствующее аппаратное обеспечение устройства регулировки дозировки разброса с использованием программы, которая может быть сохранена на машиночитаемом носителе информации устройства регулировки дозировки разброса.
Следует отметить, что для варианта осуществления устройства, беспилотного летательного аппарата и носителя информации, поскольку этот вариант осуществления в основном аналогичен варианту осуществления способа, описание является сравнительно простым, и частичное описание варианта осуществления способа может ссылаться на соответствующее содержание.
Из приведенного выше описания варианта осуществления специалистам в данной области техники может быть понятно, что изобретение может быть реализовано с помощью программного обеспечения и необходимого общего аппаратного обеспечения и, конечно, может быть реализовано посредством аппаратного обеспечения, причем первое является предпочтительным вариантом осуществления во многих случаях. Основываясь на таком понимании, техническое решение изобретения может быть по существу или частично реализовано в виде программных продуктов, которые вносят вклад в соответствующие технологии, при этом компьютерные программные продукты могут храниться на машиночитаемом носителе информации, таком как гибкий диск, постоянное запоминающее устройство (для краткости ПЗУ), оперативное запоминающее устройство (для краткости ОЗУ), флэш-память, жесткий или оптический диск и т.д. компьютера, и имеется несколько команд, которые заставляют компьютерное оборудование (которое может представлять собой робота, персональный компьютер, сервер, сетевое оборудование и т.д.) выполнять способ регулировки дозировки разброса, описанный в любом варианте осуществления настоящего изобретения.
Стоит отметить, что все блоки и компоненты, включенные в устройство регулировки дозировки разброса, описанное выше, разделены просто в соответствии с функциональной логикой, но не ограничены вышеупомянутым разделением, при условии, что могут быть реализованы соответствующие функции. Кроме того, конкретные названия каждого функционального блока служат только для удобства взаимного различения, и их не используют для ограничения объема защиты изобретения.
Следует понимать, что различные части изобретения могут быть реализованы посредством аппаратных средств, программного обеспечения, встроенного программного обеспечения или их сочетания. В вышеупомянутом варианте осуществления несколько этапов или способов может быть реализовано с помощью программного обеспечения или встроенного программного обеспечения, хранимого в памяти и выполняемого соответствующим устройством выполнения команд. Например, если они реализованы с помощью аппаратного обеспечения, как в другом варианте осуществления, то они могут быть реализованы с помощью любой из следующих технологий, известных в данной области техники, или их комбинации: дискретные логические схемы логических вентилей для реализации логических функций над сигналами данных, прикладные интегральные схемы с соответствующими элементами комбинационной логики, программируемыми вентильными матрицами (PGA), полевыми программируемыми вентильными матрицами (FPGA) и т.д.
Термины "первый", "второй" и т.д. в описании и формуле настоящего изобретения и на приведенных выше сопроводительных чертежах используют для различения подобных объектов, но не обязательно используют для описания конкретной последовательности или порядка приоритета. Следует понимать, что данные, используемые таким образом, можно обменивать при соответствующих обстоятельствах, так что вариант осуществления настоящего изобретения, описанный в этом документе, может быть реализован в последовательности, отличной от тех, которые показаны или описаны в этом документе. Кроме того, термины "включающий в себя", "имеющий" и любые их варианты предназначены для охвата неисключительных включений, например процессы, способы, системы, продукты или устройства, которые содержат ряд этапов или узлов, не должны быть ограничены этими четко перечисленными этапами или узлами, но могут включать в себя другие этапы или узлы, не указанные явно или не присущие процессам, способам, продуктам или устройствам. Описание со ссылкой на выражения "один вариант осуществления", "некоторые варианты осуществления", "примеры", "конкретные примеры", "некоторые примеры" и т.д. означает, что конкретный признак, структура, материал или характеристика описаны в связи с этим вариантом осуществления или примером, который включен по меньшей мере в один вариант осуществления или пример изобретения. В этом описании схематические выражения вышеуказанных терминов не обязательно относятся к одному и тому же варианту осуществления или примеру. Кроме того, описанные конкретные признаки, структуры, материалы или характеристики могут быть подходящим образом объединены в любом одном или нескольких вариантах осуществления или примерах.
Следует отметить, что этапы, показанные на блок-схеме прилагаемых чертежей, могут быть выполнены, например, в компьютерной системе для набора команд, выполняемых компьютером, и, хотя на блок-схеме показана логическая последовательность, в некоторых случаях показанные или описанные этапы могут быть выполнены в последовательности, отличной от указанной в данном документе.
Следует отметить, что вышеупомянутое является просто предпочтительным вариантом осуществления изобретения и применяемым техническим принципом. Специалистам в данной области техники понятно, что изобретение не ограничено конкретным вариантом осуществления, описанным в данном документе, и что можно вносить различные очевидные изменения, корректировки и замены, не выходя за пределы объема защиты изобретения. Следовательно, хотя изобретение было описано сравнительно подробно посредством вышеупомянутого варианта осуществления, изобретение не ограничено только вышеупомянутым вариантом осуществления, а также может включать в себя больше других эквивалентных вариантов осуществления без отклонения от концепции изобретения и объема изобретения, определяемого объемом прилагаемой формулы изобретения.
Промышленная применимость
Техническое решение, предложенное в варианте осуществления изобретения, может быть применено в процессе регулировки дозировки разброса. После получения команды калибровки, включающей в себя калибровочную скорость вращения и продолжительность калибровки, электродвигателем управляют так, чтобы он работал с калибровочной скоростью вращения в течение продолжительности калибровки, чтобы выгрузить материал, который необходимо разбросать, и определяют поправочный коэффициент между скоростью полета и скоростью вращения электродвигателя в соответствии с параметром полета и фактическим расходом материала, который необходимо разбросать, выгруженным с помощью захватывающего материал устройства в течение продолжительности калибровки, так что скорость вращения электрического двигателя может быть отрегулирована в соответствии с поправочным коэффициентом, чтобы регулировать дозировку разброса во время разброса материала, который необходимо разбросать. На этапе калибровки в соответствии с вариантом осуществления настоящего изобретения электродвигателем управляют так, чтобы он работал с калибровочной скоростью вращения в течение продолжительности калибровки, чтобы выгружать различные материалы, которые необходимо разбросать, тем самым получая поправочный коэффициент между скоростью полета и скоростью вращения электродвигателя, подстраивая скорость вращения электродвигателя для приведения в движение захватывающего материал устройства на разных скоростях полета беспилотного летательного аппарата для разброса различных материалов, и выполняя точный переменный разброс.
Изобретение относится к области беспилотных летательных аппаратов (БПЛА) и касается способа регулировки дозировки разброса различного материала. Разброс осуществляется с помощью захватывающего материал устройства, приводимого в движение электродвигателем. Устройство получает команду калибровки. Команда калибровки содержит калибровочную скорость вращения и продолжительность калибровки. Электродвигатель при этом работает с калибровочной скоростью вращения в течение периода калибровки. Кроме того, получают параметры полета и фактическое количество выгружаемого материала. Затем определяют поправочный коэффициент между скоростью полета и скоростью вращения электродвигателя. Причем в процессе разброса материала регулируют скорость вращения электродвигателя в соответствии с поправочным коэффициентом. Достигается равномерный и точный разброс материала при помощи БПЛА. 4 н. и 10 з.п. ф-лы, 6 ил.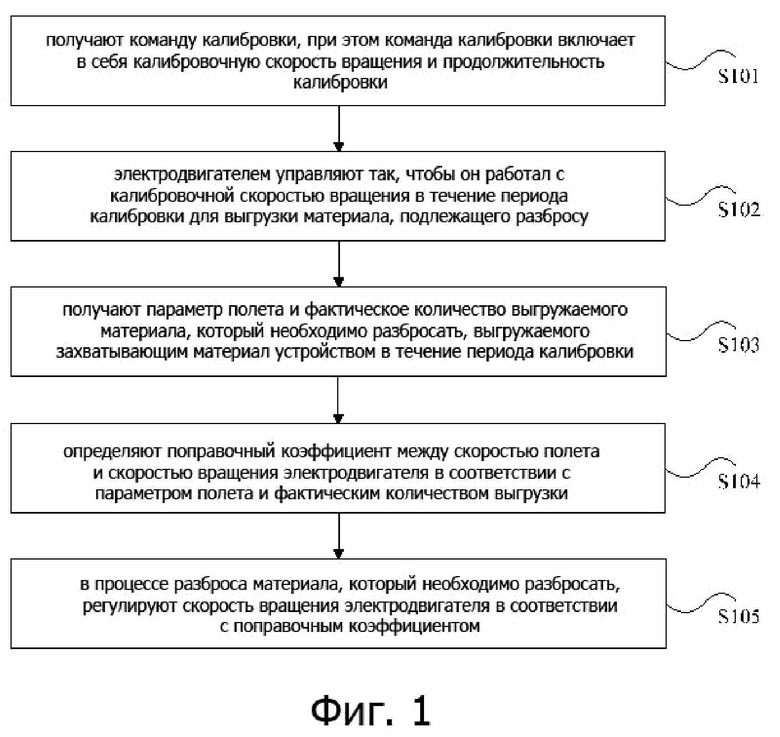
1. Способ регулировки дозировки разброса, применяемый к беспилотному летательному аппарату для разброса с помощью захватывающего материал устройства, приводимого в движение электродвигателем, причем способ содержит следующее:
получают команду калибровки, при этом команда калибровки содержит калибровочную скорость вращения и продолжительность калибровки,
управляют электродвигателем так, чтобы он работал с калибровочной скоростью вращения в течение периода калибровки для выгрузки материала, подлежащего разбросу,
получают параметры полета и фактическое количество выгружаемого материала, который необходимо разбросать, выгружаемого захватывающим материал устройством в течение периода калибровки,
определяют поправочный коэффициент между скоростью полета и скоростью вращения электродвигателя в соответствии с параметром полета и фактическим количеством выгрузки, и
в процессе разброса материала регулируют скорость вращения электродвигателя в соответствии с поправочным коэффициентом.
2. Способ по п.1, в котором параметр полета включает в себя скорость полета, высоту полета и расход материала, который необходимо разбросать, на единицу площади, а этап определения поправочного коэффициента между скоростью полета и скоростью вращения электродвигателя в соответствии с параметром полета и фактическим количеством выгрузки содержит следующее:
определяют первый линейный коэффициент между скоростью выгрузки и скоростью вращения электродвигателя в соответствии с фактической величиной выгрузки, калибровочной скоростью вращения и продолжительностью калибровки,
определяют второй линейный коэффициент между скоростью выгрузки и скоростью полета в соответствии с высотой полета и расходом на единицу площади и
определяют поправочный коэффициент между скоростью полета и скоростью вращения электродвигателя на основе первого линейного коэффициента и второго линейного коэффициента.
3. Способ по п.2, в котором калибровочная скорость вращения составляет 0,5 от максимальной скорости вращения электродвигателя, и этап управления электродвигателем так, чтобы он работал с калибровочной скоростью вращения в течение периода калибровки для выгрузки материала, подлежащего разбросу, содержит следующее:
управляют электродвигателем так, чтобы он работал со скоростью, равной 0,5 от максимальной скорости вращения, в течение периода калибровки для выгрузки материала, подлежащего разбросу, и
этап определения первого линейного коэффициента между скоростью выгрузки и скоростью вращения электродвигателя в соответствии с фактической величиной выгрузки, калибровочной скоростью вращения и продолжительностью калибровки содержит следующее: вычисляют произведение продолжительности калибровки на 0,5-кратную максимальную скорость вращения и используют в качестве первого линейного коэффициента отношение фактического количества выгрузки к произведению.
4. Способ по п.2, в котором команда калибровки включает в себя несколько калибровочных скоростей вращения, и этап управления электродвигателем так, чтобы он работал с калибровочной скоростью вращения в течение периода калибровки для выгрузки материала, подлежащего разбросу, содержит следующее:
последовательно управляют электродвигателем так, чтобы он работал с каждой калибровочной скоростью вращения в течение периода калибровки для выгрузки материала, подлежащего разбросу, и
этап определения первого линейного коэффициента между скоростью выгрузки и скоростью вращения электродвигателя в соответствии с фактической величиной выгрузки, калибровочной скоростью вращения и продолжительностью калибровки содержит следующее:
генерируют линейную кривую скорости выгрузки и скорости вращения электродвигателя в соответствии с каждой калибровочной скоростью вращения и фактической величиной выгрузки, соответствующей каждой калибровочной скорости вращения, и
определяют первый линейный коэффициент между скоростью выгрузки и скоростью вращения электродвигателя в соответствии с линейной кривой.
5. Способ по п.2, в котором этап определения второго линейного коэффициента между скоростью выгрузки и скоростью полета в соответствии с высотой полета и расходом на единицу площади содержит следующее:
определяют ширину разброса в соответствии с высотой полета и
вычисляют произведение ширины разброса и расхода на единицу площади для получения второго линейного коэффициента между скоростью выгрузки и скоростью полета.
6. Способ по п.1, в котором регулировка скорости вращения электродвигателя в соответствии с поправочным коэффициентом содержит следующее:
получают скорость полета беспилотного летательного аппарата в режиме реального времени,
вычисляют целевую скорость вращения электродвигателя в соответствии со скоростью полета в режиме реального времени и поправочным коэффициентом и
регулируют скорость вращения электродвигателя до целевой скорости вращения для регулировки дозировки материала, который необходимо разбросать.
7. Устройство для регулировки дозировки разброса, применяемое к беспилотному летательному аппарату для разброса с помощью захватывающего материал устройства, приводимого в движение электродвигателем, причем устройство содержит один или несколько процессоров и одно или несколько запоминающих устройств для хранения программных модулей, причем процессор выполняет программный модуль, а программный модуль содержит:
компонент приема команды калибровки, выполненный с возможностью принимать команду калибровки, при этом команда калибровки содержит калибровочную скорость вращения и продолжительность калибровки,
компонент управления калибровкой, выполненный с возможностью управлять электродвигателем так, чтобы он работал с калибровочной скоростью вращения в течение периода калибровки для выгрузки материала, подлежащего разбросу,
компонент получения параметров, выполненный с возможностью получать параметры полета и фактическое количество выгружаемого материала, который необходимо разбросать, выгружаемого захватывающим материал устройством в течение периода калибровки,
компонент определения поправочного коэффициента, выполненный с возможностью определять поправочный коэффициент между скоростью полета и скоростью вращения электродвигателя в соответствии с параметром полета и фактическим количеством выгрузки, и
компонент регулирования дозировки разброса, выполненный с возможностью регулировать в процессе разброса материала скорость вращения электродвигателя в соответствии с поправочным коэффициентом.
8. Устройство по п.7, в котором параметр полета содержит скорость полета, ширину разброса и расход на единицу площади материала, который необходимо разбросать, а компонент определения поправочного коэффициента содержит:
подкомпонент определения первого линейного коэффициента, выполненный с возможностью определять первый линейный коэффициент между скоростью выгрузки и скоростью вращения электродвигателя в соответствии с фактической величиной выгрузки, калибровочной скоростью вращения и продолжительностью калибровки,
подкомпонент определения второго линейного коэффициента, выполненный с возможностью определять второй линейный коэффициент между скоростью выгрузки и скоростью полета в соответствии с высотой полета и расходом на единицу площади, и
подкомпонент определения поправочного коэффициента, выполненный с возможностью определять поправочный коэффициент между скоростью полета и скоростью вращения электродвигателя на основе первого линейного коэффициента и второго линейного коэффициента.
9. Устройство по п.8, в котором калибровочная скорость вращения составляет 0,5 от максимальной скорости вращения электродвигателя, и
компонент управления калибровкой содержит:
первый подкомпонент управления, выполненный с возможностью управления электродвигателем так, чтобы он работал со скоростью, составляющей 0,5 от максимальной скорости вращения, в течение периода калибровки для выгрузки материала, подлежащего разбросу, и
подкомпонент определения первого линейного коэффициента содержит:
блок вычисления произведения, выполненный с возможностью вычислять произведение продолжительности калибровки на 0,5-кратную максимальную скорость вращения, и блок определения первого линейного коэффициента, выполненный с возможностью принимать отношение фактического количества выгрузки к произведению в качестве первого линейного коэффициента.
10. Устройство по п.8, в котором команда калибровки содержит несколько калибровочных скоростей вращения, а компонент управления калибровкой содержит:
второй подкомпонент управления, выполненный с возможностью последовательно управлять электродвигателем так, чтобы он работал с каждой калибровочной скоростью вращения в течение периода калибровки для выгрузки материала, подлежащего разбросу, и
подкомпонент определения первого линейного коэффициента содержит:
блок подбора линейной кривой, выполненный с возможностью генерировать линейную кривую скорости выгрузки и скорости вращения электродвигателя в соответствии с каждой калибровочной скоростью вращения и фактической величиной выгрузки, соответствующей каждой калибровочной скорости вращения, и
блок определения второго линейного коэффициента, выполненный с возможностью определять первый линейный коэффициент между скоростью выгрузки и скоростью вращения электродвигателя в соответствии с линейной кривой.
11. Устройство по п.8, в котором подкомпонент определения второго линейного коэффициента содержит блок определения ширины разброса, выполненный с возможностью определять ширину разброса в соответствии с высотой полета, и
третий блок определения линейного коэффициента, выполненный с возможностью вычислять произведение ширины разброса и расхода на единицу площади для получения второго линейного коэффициента между скоростью выгрузки и скоростью полета.
12. Устройство по п.7, в котором подкомпонент регулировки дозировки разброса содержит:
подкомпонент получения скорости полета в режиме реального времени, выполненный с возможностью получения скорости полета беспилотного летательного аппарата в режиме реального времени,
подкомпонент вычисления целевой скорости вращения, выполненный с возможностью вычислять целевую скорость вращения электродвигателя в соответствии со скоростью полета в режиме реального времени и поправочным коэффициентом, и
подкомпонент регулировки, выполненный с возможностью регулировать скорость вращения электродвигателя до целевой скорости вращения для регулировки дозировки материала, который необходимо разбросать.
13. Беспилотный летательный аппарат, содержащий:
один или несколько процессоров и
запоминающее устройство, выполненное с возможностью хранения одной или нескольких программ, при этом
когда одну или несколько программ выполняют одним или несколькими процессорами, один или несколько процессоров реализует способ регулировки дозировки разброса по п.1.
14. Машиночитаемый носитель информации, содержащий компьютерную программу, хранящуюся на нем, причем программа при выполнении ее процессором реализует способ регулировки дозировки разброса по любому из пп.1-6.
| CN 106416530 A, 22.02.2017 | |||
| WO 2018172248 A2, 27.09.2018 | |||
| CN 108791894 A, 13.11.2018 | |||
| WO 2018086506 A1, 17.05.2018 | |||
| СПОСОБ УПРАВЛЕНИЯ ДОЗИРУЮЩЕЙ СИСТЕМОЙ СЕЯЛКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2273979C2 |

