Область техники, к которой относится изобретение
Настоящее изобретение относится к области защиты растений с помощью беспилотных летательных аппаратов, и в частности, к способу и устройству управления беспилотным летательным аппаратом для защиты растений.
Уровень техники
Обычно, когда беспилотный летательный аппарат для защиты растений (далее – беспилотный летательный аппарат) выполняет работу по защите растений, из-за граничных ограничений по меньшей мере на одном рабочем участке беспилотный летательный аппарат непрерывно меняет борозды (ряды) и переключает направление полёта во время рабочего процесса для того, чтобы завершить рабочие задачи на всей площади обрабатываемого участка. В предшествующем уровне техники, в соответствии с различными способами установки рабочего сопла на беспилотном летательном аппарате, обычно используемые режимы изменения борозды включают в себя переходное изменение борозды и дрейфовое изменение борозды.
Фиг. 1 представляет известную схему переходного изменения борозды. Беспилотный летательный аппарат открывает заднее сопло для работы над каждой бороздой (ряду) и после снижения рабочей скорости в конце каждой борозды до нуля, в результате замедления, закрывает сопло. В дальнейшем после автоматического перевода в начало следующей борозды (ряда) беспилотный летательный аппарат открывает сопло, а затем беспилотный летательный аппарат разгоняется до рабочей скорости, чтобы завершить работу на всех обрабатываемых участках. Показанная на фиг. 2 схема соответствует известному из уровня техники дрейфовому изменению борозды. Когда используется дрейфовое изменение борозды, беспилотный летательный аппарат начинает замедляться от рабочей скорости до определённого значения скорости на определённом расстоянии от конечной точки каждой борозды (например, расстояние H1 на фиг. 2), затем изменяет борозду при постоянной скорости вдоль H2 и ускоряется до рабочей скорости на расстоянии H3 после того, как изменение борозды завершено.
Однако оба вышеуказанных режима смены борозды имеют недостатки. Например, когда используется переходное изменение борозды, рабочее сопло беспилотного летательного аппарата находится в закрытом состоянии во время процесса перевода, в результате чего край каждого обрабатываемого земельного участка не может быть обработан, но вредные организмы в основном скрываются на краю каждого обрабатываемого земельного участка, так что приходится увеличивать размах обработки для каждого обрабатываемого участка, и суммарная эффективность работы снижается. По сравнению с переходным изменением борозды, дрейфовое изменение борозды не увеличивает размах обработки, но при дрейфе граница между беспилотным летательным аппаратом и каждым обрабатываемым участком может нарушаться (например, из-за порывов ветра рядом с каждым обрабатываемым участком или другие других препятствий и т.д.), имеется вероятность столкновений и аварий, а безопасность становится низкой.
С учётом того, что в предшествующем уровне техники беспилотный летательный аппарат закрывает рабочее сопло при смене борозды, поэтому необходимо увеличить размах обработки кроев, или при дрейфовом изменении борозды возможны столкновения и аварии, так что эффективного решения ещё не предложено.
Сущность изобретения
По меньшей мере некоторые варианты осуществления настоящего изобретения предоставляют способ управления беспилотным летательным аппаратом и соответствующее устройство управления беспилотным летательным аппаратом, чтобы по меньшей мере частично решить вышеуказанные проблемы.
В одном объекте настоящего изобретения предлагается способ управления беспилотным летательным аппаратом для защиты растений. Способ включает в себя следующие операции: начинают замедление полета в первом заданном положении на первом рабочем маршруте, так чтобы скорость полёта беспилотного летательного аппарата в конечном рабочем положении первого рабочего маршрута снизилась до нуля; выполняют перелёт к начальному рабочему положению второго рабочего маршрута переходным способом движения с заданной угловой скоростью; и выполняют полёт по второму рабочему маршруту, при этом рабочее сопло поддерживают в открытом состоянии в процессе полёта беспилотного летательного аппарата.
В частном варианте осуществления изобретения, начало замедления полета в первом заданном положении на первом рабочем маршруте, чтобы скорость полёта беспилотного летательного аппарата в конечном рабочем положении первого рабочего маршрута снизилась до нуля, заключается в том, что когда летательный аппарат долетает до первого заданного положения на первом рабочем маршруте, начинают замедление полета с первым заданным ускорением, так чтобы скорость полёта беспилотного летательного аппарата в конечном рабочем положении первого рабочего маршрута снизилась до нуля, при этом указанное первое заданное положение определяется заданной рабочей скоростью беспилотного летательного аппарата для защиты растений и указанным первым ускорением.
В частном варианте осуществления изобретения, указанный перелёт к начальному рабочему положению второго рабочего маршрута переходным способом движения с заданной угловой скоростью, заключается в том, что выполняют перелёт к указанному начальному рабочему положению второго рабочего маршрута переходным способом движения из конечного рабочего положения первого рабочего маршрута таким образом, чтобы скорость полёта беспилотного летательного аппарата в указанном начальном рабочем положении была снижена до нуля, и управляют беспилотным летательным аппаратом таким образом, чтобы летательный аппарат совершал вращательное движение с указанной заданной угловой скоростью во время переходного перелёта.
В частном варианте осуществления изобретения, перелёт к указанному начальному рабочему положению второго рабочего маршрута переходным способом движения из конечного рабочего положения первого рабочего маршрута таким образом, чтобы скорость полёта беспилотного летательного аппарата для защиты растений в указанном начальном рабочем положении была снижена до нуля, заключается в том, что выполняют ускоренный перелёт с заданным третьим ускорением для достижения среднего положения на расстоянии между первым рабочим маршрутом и вторым рабочим маршрутом, и выполняют замедленный перелёт с указанным заданным третьим ускорением от указанного среднего положения в указанное начальное рабочее положение второго рабочего маршрута.
В частном варианте осуществления изобретения, при полёте по второму рабочему маршруту выполняют ускоренный полёт с заданным вторым ускорением до достижения второго заданного положения на втором рабочем маршруте, так чтобы скорость полёта беспилотного летательного аппарата в указанном втором заданном положении была равна заданной рабочей скорости, при этом указанное второе заданное положение определяется указанной заданной рабочей скоростью и указанным заданным вторым ускорением, и выполняют полёт с указанной заданной рабочей скоростью.
В другом объекте изобретения, устройство управления беспилотным летательным аппаратом содержит: компонент первого замедления, выполненный с возможностью обеспечивать начало замедление, когда летательный аппарат достиг первого заданного положения на первом рабочем маршруте, так чтобы скорость полёта беспилотного летательного аппарата для защиты растений в конечном рабочем положении первого рабочего маршрута снижалась до нуля; компонент переходного перелёта, выполненный с возможностью обеспечивать перелёт в начальное рабочее положение второго рабочего маршрута переходным способом движения с заданной угловой скоростью, и компонент второго полёта, выполненный с возможностью обеспечивать полёт по второму рабочему маршруту, при этом рабочее сопло поддерживается в открытом состоянии в процессе полёта беспилотного летательного аппарата для защиты растений.
В частном варианте осуществления изобретения компонент первого замедления содержит: подкомпонент первого замедления, выполненный с возможностью начинать замедление с заданным первым ускорением при достижении указанного первого заданного положения первого рабочего маршрута, так чтобы скорость полёта беспилотного летательного аппарата в конечном рабочем положении первого рабочего маршрута замедлялась до нуля, при этом указанное первое заданное положение определяется заданной рабочей скоростью беспилотного летательного аппарата и указанным заданным первым ускорением.
В частном варианте осуществления изобретения компонент переходного перелёта содержит: подкомпонент переходного перелёта, выполненный с возможностью обеспечивать перелёт в начальное рабочее положение второго рабочего маршрута переходным способом движения из конечного рабочего положения первого рабочего маршрута, так чтобы скорость полёта беспилотного летательного аппарата для защиты растений в начальном рабочем положении замедлялась до нуля; и подкомпонент вращательного перемещения, выполненный с возможностью управления беспилотным летательным аппаратом для защиты растений таким образом, чтобы летательный аппарат совершал вращательное движение с указанной заданной угловой скоростью во время переходного перелёта.
В частном варианте осуществления изобретения подкомпонент переходного перелёта содержит: элемент ускорения, выполненный с возможностью обеспечивать выполнение ускоренного перелёта с заданным третьим ускорением для достижения среднего положения на пути между первым рабочим маршрутом и вторым рабочим маршрутом; и элемент замедления, выполненный с возможностью обеспечивать выполнение замедленного перелёта с указанным заданным третьим ускорением из указанного среднего положения в начальное рабочее положение второго рабочего маршрута.
В частном варианте осуществления изобретения компонент второго полёта содержит: подкомпонент второго ускорения, выполненный с возможностью обеспечения ускоренного полёта с заданным вторым ускорением для достижения второго заданного положения второго рабочего маршрута, так чтобы скорость полёта беспилотного летательного аппарата во втором заданном положении составляла заданную рабочую скорость, причём второе заданное положение определяется указанной заданной рабочей скоростью и указанным заданным вторым ускорением; и подкомпонент полёта, выполненный с возможностью обеспечения полёта с указанной заданной рабочей скоростью.
По сравнению с предшествующим уровнем техники варианты осуществления настоящего изобретения имеют следующие преимущества.
При достижении в полёте в первого заданного положения на первом рабочем маршруте беспилотный летательный аппарат начинает замедляться, так что скорость полёта беспилотного летательного аппарата в конечном рабочем положении первого рабочего маршрута уменьшается до нуля, беспилотный летательный аппарат перелетает в начальное рабочее положение второго рабочего маршрута переходным способом движения с заданной угловой скоростью, а затем беспилотный летательный аппарат летит вдоль второго рабочего маршрута. В настоящем варианте осуществления рабочее сопло поддерживается в открытом состоянии во время полёта беспилотного летательного аппарата. Следовательно, решается проблема, существующая в предшествующем уровне техники, которая заключается в необходимости дополнительной операции обработки края из-за того, что рабочее сопло должно быть закрыто во время смены борозды, или проблема, связанная с возможными столкновениями и авариями, вызванными сносом летательного аппарата во время смены борозды, при этом эффективность работы и безопасность улучшаются.
Краткое описание чертежей
Прилагаемые чертежи предназначены для обеспечения дополнительного понимания изобретения и составляют часть настоящего описания, а варианты осуществления изобретения и их описание предназначены для пояснения изобретения, но не являются ограничениями для объема изобретения. На чертежах:
Фиг. 1 представляет схему переходного изменения борозды, известную из предшествующего уровня техники.
Фиг. 2 представляет схему дрейфового изменения борозды, известную из предшествующего уровня техники.
Фиг. 3 - блок-схема способа управления беспилотным летательным аппаратом в соответствии с вариантом осуществления настоящего изобретения.
Фиг. 4 - схема работы беспилотного летательного аппарата в соответствии с вариантом осуществления настоящего изобретения.
Фиг. 5 - блок-схема способа управления беспилотным летательным аппаратом в соответствии с вариантом осуществления настоящего изобретения.
Фиг. 6 - структурная блок-схема рабочего устройства беспилотного летательного аппарата, в соответствии с вариантом осуществления настоящего изобретения.
Подробное описание изобретения
Для того чтобы сделать вышеупомянутые задачи, признаки и преимущества настоящего изобретения более очевидными и понятными, настоящее изобретение дополнительно подробно описывается ниже со ссылками на чертежи и конкретные варианты реализации.
Фиг. 3 является блок-схемой последовательности операций способа работы беспилотного летательного аппарата в соответствии с вариантом осуществления настоящего изобретения. Способ может включать в себя следующие этапы.
На этапе 301 беспилотный летательный аппарат начинает замедляться, когда долетает до первого заданного положения на первом рабочем маршруте, так чтобы скорость полёта беспилотного летательного аппарата в конечном рабочем положении первого рабочего маршрута замедлялась до нуля.
Обычно перед операцией по защите растений беспилотный летательный аппарат сначала производит съемку по меньшей мере одного обрабатываемого участка, чтобы получить информацию о границе указанного по меньшей мере одного обрабатываемого участка, и формирует по меньшей мере один эталонный рабочий маршрут в соответствии с информацией о границе и выбором пользователя, так чтобы фактический маршрут полёта формировался в связи с указанным по меньшей мере одним эталонным рабочим маршрутом. Беспилотный летательный аппарат может летать в соответствии с маршрутом полёта и выполнять распыление пестицидов или химических удобрений через рабочее сопло беспилотного летательного аппарата для защиты растений во время полёта, таким образом, завершая работу по меньшей мере на одном обрабатываемом участке.
Указанный по меньшей мере один эталонный рабочий маршрут, сформированный посредством съёмки и картирования, обычно состоит из множества взаимно параллельных рабочих маршрутов, каждый из которых представляет собой борозду, над которой должен лететь беспилотный летательный аппарат во время фактической операции, и также может называться «рядом».
Фиг. 4 является схемой рабочего процесса защиты растений беспилотным аппаратом в соответствии с вариантом осуществления настоящего изобретения. Как показано на фиг. 4, имеется три борозды, то есть рабочие маршруты AB, CD и EF. Когда беспилотный летательный аппарат выполняет операцию по защите растений, этот беспилотный летательный аппарат может лететь из точки A в точку B вдоль рабочего маршрута AB, затем менять борозду, переходя в точку C, и продолжать изменение борозды после прилёта в точку D вдоль рабочего маршрута CD, чтобы завершить операцию на рабочем маршруте CD.
В частном варианте осуществления настоящего изобретения беспилотный летательный аппарат может начинать замедляться, когда долетает до первого заданного положения на первом рабочем маршруте, так чтобы скорость полёта беспилотного летательного аппарата, когда аппарат достигнет конечного рабочего положения первого рабочего маршрута, замедлялась до нуля.
Например, рабочий маршрут AB, показанный на фиг. 4 в качестве первого рабочего маршрута, взят в качестве примера, когда беспилотный летательный аппарат летит вдоль рабочего маршрута AB с предварительно установленной рабочей скоростью, чтобы достичь определённого предварительно заданного положения, например, предварительно заданное положение может быть точкой M на фиг. 4. Затем беспилотный летательный аппарат может начать замедляться, начиная от точки M, так что скорость полёта при достижении точки B замедляется до нуля. Конкретно, предварительно заданное положение зависит от рабочей скорости беспилотного летательного аппарата и величины ускорения во время замедляющегося полёта, и специалисты в данной области техники могут устанавливать различные рабочие скорости и ускорения в соответствии с фактическими ситуациями для регулировки заданного положения, которое не ограничивается вариантом осуществления настоящего изобретения.
На этапе 302 беспилотный летательный аппарат летит к начальному рабочему положению второго рабочего маршрута переходным способом движения с заданной угловой скоростью.
Обычно, когда беспилотный летательный аппарат для защиты растений завершает операцию на первом рабочем маршруте, этот беспилотный летательный аппарат меняет борозду, чтобы выполнить работу на следующем рабочем маршруте.
В частном варианте осуществления настоящего изобретения, чтобы гарантировать, что граничный участок двух соседних рабочих маршрутов может быть охвачен во время работы беспилотного летательного аппарата для защиты растений, аппарат может продолжать выполнять распыление во время перехода к следующему рабочему маршруту путем регулирования скорости бокового перемещения беспилотного летательного аппарата и скорости вращения корпуса летательного аппарата.
В частном варианте осуществления настоящего изобретения, после достижения конечного рабочего положения первого рабочего маршрута беспилотный летательный аппарат может перелететь в начальное рабочее положение второго рабочего маршрута переходным способом из конечного рабочего положения первого рабочего маршрута, так что скорость полёта беспилотного летательного аппарата в начальном рабочем положении замедляется до нуля; при этом беспилотный летательный аппарат управляется с возможностью вращения с заданной угловой скоростью во время переходного перелёта.
В конкретном варианте осуществления изобретения беспилотный летательный аппарат может быть переведён из конечного рабочего положения первого рабочего маршрута в начальное рабочее положение второго рабочего маршрута путём управления скоростью бокового перемещения беспилотного летательного аппарата. Например, когда борозду меняют на краевой полосе BC на фиг. 4, скорость полёта беспилотного летательного аппарата в начальном рабочем положении второго рабочего маршрута (точка C на фиг. 4) может быть снижена до нуля путем, сначала, ускоренного полёта, а затем замедленного полёта. Во время переходного перелёта беспилотный летательный аппарат управляется так, что он вращается с определённой угловой скоростью. Обычно величина угловой скорости зависит от расстояния между двумя рабочими маршрутами и ускорения переходного перелёта. Следовательно, в том случае, когда расстояние между рабочими маршрутами является постоянным, специалисты в данной области техники могут регулировать угловую скорость вращения корпуса, управляя ускорением переходного перелёта, которое не ограничивается вариантом осуществления настоящего изобретения.
Следует отметить, что рабочее сопло поддерживается в открытом состоянии во время процесса смены борозды беспилотного летательного аппарата, чтобы продолжать распыление во время смены борозды.
На этапе 303 беспилотный летательный аппарат летит вдоль второго рабочего маршрута, при этом рабочее сопло поддерживается в открытом состоянии во время процесса полёта беспилотного летательного аппарата для защиты растений.
В этом варианте осуществления настоящего изобретения, когда беспилотный летательный аппарат завершает смену борозды, он может лететь вдоль второго рабочего маршрута, чтобы продолжить выполнение следующей операции.
Благодаря вышеуказанным вариантам осуществления настоящего изобретения, при достижении в полёте первого заданного положения на первом рабочем маршруте беспилотный летательный аппарат начинает замедляться, так что скорость полёта беспилотного летательного аппарата в конечном положении первого рабочего маршрута замедляется до нуля, беспилотный летательный аппарат для защиты растений перелетает в начальное рабочее положение второго рабочего маршрута переходным способом с заданной угловой скоростью, а затем беспилотный летательный аппарат летит по второму рабочему маршруту. В настоящем варианте осуществления изобретения рабочее сопло поддерживается в открытом состоянии во время полёта беспилотного летательного аппарата. Следовательно, решается проблема предшествующего уровня техники, заключающаяся в необходимости дополнительной обработки края вследствие того, что рабочее сопло должно быть закрыто во время замены борозды беспилотного летательного аппарата, или вероятности столкновения и аварии, вызванной дрейфом во время смены борозды, при этом эффективность работы и безопасность улучшаются.
На фиг. 5 показана блок-схема последовательности способа управления беспилотным летательным аппаратом в соответствии с вариантом осуществления настоящего изобретения. Способ может включать в себя следующие этапы.
На этапе 501 беспилотный летательный аппарат начинает замедляться с заданным первым ускорением при полёте в первое заданное положение первого рабочего маршрута, в результате чего скорость полёта беспилотного летательного аппарата в конечном рабочем положении первого рабочего маршрута замедляется до нуля, при этом первое заданное положение определяется заданной рабочей скоростью беспилотного летательного аппарата и заданным ускорением.
В частном варианте осуществления настоящего изобретения при выполнении операции по защите растений на первом рабочем маршруте беспилотный летательный аппарат может летать с заданной рабочей скоростью. Беспилотный летательный аппарат может начать замедляться при полёте в первое заданное положение, так что скорость полёта беспилотного летательного аппарата в конечном рабочем положении первого рабочего маршрута будет снижена до нуля. В частности, беспилотный летательный аппарат может непрерывно замедляться от первого заданного положения с заданным первым ускорением. Специалисты в данной области техники могут устанавливать конкретные значения рабочей скорости и первого ускорения с помощью системы управления полётом в соответствии с фактическими потребностями, что не ограничивается вариантом осуществления настоящего изобретения.
После того, как рабочая скорость и первое ускорение установлены, первое заданное положение может быть определено в соответствии с рабочей скоростью и первым ускорением.
В качестве примера настоящего изобретения первое заданное положение может быть определено по следующей формуле:

где S1 является расстоянием между первым заданным положением и конечным рабочим положением первого рабочего маршрута, v0 - заданная рабочая скорость, а a1 - заданное первое ускорение.
Например, фиг. 4 используется в качестве примера. Если точка М является первым заданным положением, определяемым в соответствии с приведённой выше формулой, беспилотный летательный аппарат может выполнять работу по защите растений в соответствии с заданной рабочей скоростью между точками A и M. При достижении точки М беспилотный летательный аппарат начинает замедляться в соответствии с первым ускорением, так чтобы скорость полёта беспилотного летательного аппарата замедлялась до нуля, когда беспилотный летательный аппарат достигает конечной рабочей точки, то есть точки B.
На этапе 502 беспилотный летательный аппарат летит в начальное рабочее положение второго рабочего маршрута переходным спопсобом из конечного рабочего положения первого рабочего маршрута, так чтобы скорость полёта беспилотного летательного аппарата в начальном рабочем положении замедлялась до нуля.
Когда беспилотный летательный аппарат достигает конечного рабочего положения первого рабочего маршрута, можно начинать изменение борозды. То есть беспилотный летательный аппарат летит из конечного рабочего положения первого рабочего маршрута в начальное рабочее положение соседнего второго рабочего маршрута.
В частном варианте осуществления настоящего изобретения беспилотный летательный аппарат может сначала выполнить ускоренный полёт, чтобы достичь среднего положения на пути между первым рабочим маршрутом и вторым рабочим маршрутом с заданным третьим ускорением, а затем продолжить выполнять замедленный полёт из среднего положения в начальное рабочее положение второго рабочего маршрута с заданным третьим ускорением, так чтобы скорость полёта беспилотного летательного аппарата снижалась до нуля при достижении начального рабочего положения второго рабочего маршрута.
В конкретном варианте оператор может задавать конкретное значение третьего ускорения в системе управления полётом, и после того, как установлено третье ускорение скорость, беспилотный летательный аппарат может ускоряться на первой половине пути между первым рабочим маршрутом и вторым рабочим маршрутом с третьим ускорением до среднего положения на этом пути, и продолжать замедляться на второй половине пути с третьим ускорением.
Следует отметить, что поскольку фаза ускорения и фаза замедления беспилотного летательного аппарата, выполняются с заданным третьим ускорением во время переходного перелёта, продолжительность ускоренного полёта должна быть равна продолжительности замедленного полёта.
В качестве примера, продолжительность ускоренного полёта или продолжительность замедленного полёта могут отдельно определяться по следующей формуле:
где t - продолжительность ускоренного полёта или продолжительность замедленного полёта, S2 - расстояние между первым рабочим маршрутом и вторым рабочим маршрутом, а a3 - заданное третье ускорение.
Например, на фиг. 4 в качестве примера: если точка K является средним положением расстояния между первым рабочим маршрутом и вторым рабочим маршрутом, беспилотный летательный аппарат может ускоряться от точки B до точки K в соответствии с заданным третьим ускорением, а затем замедляться от точки K до точки C. Продолжительность полёта беспилотного летательного аппарата на этапе ускорения и период полёта беспилотного летательного аппарата на этапе замедления представляет собой определенное выше время t.
На этапе 503 беспилотный летательный аппарат управляется так, чтобы он вращался с заданной угловой скоростью во время переходного перелёта.
В частном варианте осуществления настоящего изобретения, когда меняют борозду при переходном перелёте, заданную угловую скорость также можно использовать для управления вращением беспилотного летательного аппарата для того, чтобы гарантировать, что беспилотный летательный аппарат при смене борозды сможет пролететь вдоль края соседнего рабочего маршрута. Кроме того, во время этого процесса рабочее сопло поддерживается в открытом состоянии для выполнения распыления.
В качестве примера, угловая скорость вращательного движения беспилотного летательного аппарата может быть определена по следующей формуле:

где ω - заданная угловая скорость, S2 - расстояние между первым рабочим маршрутом и вторым рабочим маршрутом, а a3 – заданное третье ускорение.
На этапе 504 беспилотный летательный аппарат выполняет ускоренный полёт, чтобы прибыть во второе заданное положение второго рабочего маршрута с заданным вторым ускорением, так чтобы скорость беспилотного летательного аппарата во втором заданном положении была равна заданной рабочей скорости, при этом второе заданное положение определяется на основе заданной рабочей скорости и заданного второго ускорения.
В частном варианте осуществления изобретения, при достижении начального положения второго рабочего маршрута после смены борозды беспилотный летательный аппарат в соответствии с заданным вторым ускорением может ускоряться вдоль второго рабочего маршрута до рабочей скорости беспилотного летательного аппарата на определённом расстоянии. Например, беспилотный летательный аппарат выполняет ускоренный полёт, чтобы прибыть во второе заданное положение. В частности, расстояние ускоренного полета зависит от установленной рабочей скорости и заданного второго ускорения.
В качестве примера, расстояние ускоренного полета может быть определено по следующей формуле:
где S3 - расстояние между вторым заданным положением и начальным рабочим положением второго рабочего маршрута, v0 - заданная рабочая скорость, а a2 - заданное второе ускорение.
Например, на фиг. 4 в качестве примера. Если точка N является вторым заданным положением, определённым в соответствии с вышеприведенной формулой, беспилотный летательный аппарат может ускоряться с заданным вторым ускорением между C и N, и когда точка N достигается, может быть выполнен этап S505 выполнения полёта в соответствии с заданной рабочей скоростью.
На этапе 505 беспилотный летательный аппарат летит с заданной рабочей скоростью.
Следует отметить, что во время полёта в соответствии с вариантом осуществления настоящего изобретения, рабочее сопло беспилотного летательного аппарата всегда поддерживается в открытом состоянии. Следовательно, проблема, существующая в предшествующем уровне техники, связанная с необходимостью дополнительной обработки края обрабатываемого участка, решается. Кроме того, беспилотный летательный аппарат в соответствии с вариантом осуществления настоящего изобретения, может полностью летать в пределах «размаха» обрабатываемого участка в соответствии с фактическим маршрутом полёта, тем самым также исключается возможность столкновений и аварий, вызванных помехами на соседнем участке, и обеспечивать повышение эксплуатационной безопасности.
Следует отметить, что для вариантов осуществления способа, для простоты описания, все варианты выражены в виде последовательности действий, но специалистам в данной области техники следует принимать во внимание, что варианты осуществления настоящего изобретения не ограничиваются описанной последовательностью действий, поскольку определенные этапы могут выполняться в других последовательностях или одновременно, в соответствии с вариантами осуществления настоящего изобретения. В дальнейшем специалистам в данной области техники также следует принимать во внимание, что все варианты осуществления, описанные в этом документе, являются иллюстративными вариантами, и соответствующие действия необязательно требуются в вариантах осуществления настоящего изобретения.
Фиг. 6 является структурной блок-схемой рабочего устройства беспилотного летательного аппарата в соответствии с вариантом осуществления настоящего изобретения. Устройство может включать в себя: компонент 601 первого замедления, компонент 602 переходного перелёта и компонент 603 второго полёта.
Компонент 601 первого замедления предназначен для выполнения начала замедления при достижении первого заданного положения на первом рабочем маршруте, так чтобы скорость полёта беспилотного летательного аппарата в конечном рабочем положении первого рабочего маршрута замедлялась до нуля.
Компонент 602 переходного перелёта предназначен для перелёта в начальное рабочее положение второго рабочего маршрута в режиме переходного способа движения с заданной угловой скоростью.
Компонент 603 второго полёта предназначен для обеспечения полёта вдоль второго рабочего маршрута.
Рабочее сопло поддерживается в открытом состоянии во время полёта беспилотного летательного аппарата.
В варианте осуществления настоящего изобретения компонент 601 первого замедления может включать в себя подкомпонент 6011 первого замедления.
Подкомпонент 6011 первого замедления предназначен для начала замедления с заданным первым ускорением при достижении первого заданного положения на первом рабочем маршруте, так чтобы скорость полёта беспилотного летательного аппарата в конечном рабочем положении первого рабочего маршрута замедлялась до нуля, при этом первое заданное положение определяется заданной рабочей скоростью беспилотного летательного аппарата и заданным первым ускорением.
В варианте осуществления настоящего изобретения компонент 602 переходного перелёта может включать в себя подкомпонент 6021 переходного перелёта и подкомпонент 6022 вращательного перемещения.
Подкомпонент 6021 переходного перелёта предназначен для обеспечения перелёта в начальное рабочее положение второго рабочего маршрута переходным способом движения перемещения из конечного рабочего положения первого рабочего маршрута, так чтобы скорость перелёта беспилотного летательного аппарата в начальном рабочем положении замедлялась до нуля.
Подкомпонент 6022 вращательного перемещения предназначен для обеспечения вращения беспилотного летательного аппарата с заданной угловой скоростью во время переходного перелёта.
В варианте осуществления настоящего изобретения подкомпонент 6021 переходного перелёта может включать в себя элемент ускорения и элемент замедления.
Элемент ускорения предназначен для выполнения ускоренного полёта с заданным третьим ускорением для достижения среднего положения на пути между первым рабочим маршрутом и вторым рабочим маршрутом.
Элемент замедления предназначен для выполнения замедленного перелёта, с заданным третьим ускорением, из среднего положения в начальное рабочее положение второго рабочего маршрута.
В варианте осуществления настоящего изобретения компонент 603 второго полёта может включать в себя подкомпонент 6031 второго ускорения и подкомпонент 6032 полёта.
Подкомпонент 6031 второго ускорения предназначен для выполнения ускоренного полёта с заданным вторым ускорением для достижения второго заданного положения на втором рабочем маршруте, так чтобы скорость полёта беспилотного летательного аппарата во втором заданном положении соответствовала заданной рабочей скорости, а второе заданное положение может быть определено на основе заданной рабочей скорости и заданного второго ускорения.
Подкомпонент 6032 полёта предназначен для полёта с заданной рабочей скоростью.
Для варианта осуществления устройства, поскольку оно в основном аналогично варианту осуществления способа, описание является относительно простым, и соответствующие части могут быть отнесены к описанию варианта осуществления способа.
Различные варианты осуществления изобретения в настоящем описании описываются последовательно, каждый вариант осуществления фокусируется на отличиях от других вариантов осуществления, и идентичные или аналогичные части между различными вариантами могут быть отнесены друг к другу.
Специалистам в данной области следует принимать во внимание, что варианты осуществления настоящего изобретения могут обеспечиваться в виде способа, устройства или компьютерного программного продукта. Таким образом, варианты осуществления настоящего изобретения могут принимать формы вариантов осуществления изобретения, полностью относящихся к аппаратному обеспечению, вариантов осуществления, полностью относящихся к программному обеспечению, или вариантов осуществления, интегрирующих программное и аппаратное обеспечение. Кроме того, варианты осуществления настоящего изобретения могут принимать форму компьютерного программного продукта, реализованного на одном или нескольких доступных для компьютера носителях данных (включая в себя, но не ограничиваясь этим, дисковое запоминающее устройство, компакт-диск без возможности перезаписи (CD-ROM), оптическое запоминающее устройство, и т.п.), содержащих доступные на компьютере программные коды.
Варианты осуществления настоящего изобретения описываются со ссылкой на схемы последовательности операций способа и/или блок-схемы способа, оконечное устройство (систему) и компьютерный программный продукт в соответствии с вариантами осуществления настоящего изобретения. Следует принимать во внимание, что каждый поток и/или блок в схемах последовательности операций способа и/или блок-схемах, а также комбинация потоков и/или блоков в схемах последовательности операций способа и/или блок-схемах могут быть реализованы посредством команд компьютерной программы. Эти команды компьютерной программы могут быть предоставлены для обычного компьютера, выделенного компьютера, встроенного процессора или процессоров других программируемых оконечных устройств обработки данных для генерации машины, в результате чего устройство для достижения функций, обозначенных в одном или нескольких потоках схемы последовательности операций способа, и/или в одном или нескольких блоках блок-схем генерируются посредством команд, выполняемых компьютерами или процессорами других программируемых оконечных устройств обработки данных.
Эти команды компьютерной программы также могут храниться в считываемом компьютером запоминающем устройстве, способном направлять компьютеры или другие программируемые устройства обработки данных для работы в определённом режиме, в результате чего изготовленный продукт, включающий в себя устройство выполнения команд, генерируется с помощью команд, хранящихся в считываемом компьютером запоминающем устройстве, а устройство выполнения команд выполняет функции, обозначенные в одном или более схемах последовательности операций способа и/или одном или более блоках блок-схем.
Эти команды компьютерной программы также могут быть загружены на компьютеры или другие программируемые оконечные устройства обработки данных, в результате чего обработка, осуществляемая компьютерами, генерируется путём выполнения последовательности операций на компьютерах или других программируемых терминальных устройствах и, следовательно, команды, выполняемые на компьютерах или других программируемых терминальных устройствах, обеспечивают этап достижения функций, обозначенных в одном или нескольких потоках схем последовательности операций способа и/или одном или более блоках блок-схем.
Несмотря на то, что были описаны иллюстративные варианты осуществления настоящего изобретения, специалисты в данной области техники могут внести дополнительные изменения и модификации в варианты осуществления изобретения, как только узнают основную творческую концепцию. Следовательно, прилагаемая формула изобретения должна интерпретироваться как включающая в себя иллюстративные варианты осуществления и все изменения и модификации, попадающие в объём вариантов осуществления настоящего изобретения.
Наконец, также следует отметить, что относительные понятия, такие как первый и второй, используются просто для того, чтобы отличить один объект или операцию от другого объекта или операции в данном документе, и необязательно требуют или подразумевают существование каких-либо таких фактических отношений или порядка между этими объектами или операциями. Кроме того, термины «включать в себя», «содержать» или любые другие их варианты предназначены для указания на то, что процесс, способ, изделие или оконечное устройство, включающие в себя последовательности элементов, включают в себя не только эти элементы, но также включает в себя те элементы, которые в явном виде не перечислены, или включает в себя элементы, присущие такому процессу, методу, изделию или оконечному устройству. При условии отсутствия дополнительных ограничений, не исключается, что в процессе, способе, изделии или оконечном устройстве существуют дополнительные идентичные элементы, включая элементы, определённые предложением «включая…».
Выше приведено подробное описание способа управления беспилотным летательным аппаратом для защиты растений и устройства управления беспилотным летательным аппаратом для защиты растений, обеспечиваемых настоящим изобретением. Принцип и способ осуществления настоящего изобретения описаны в приведённых здесь конкретных примерах. Описание вариантов осуществления предназначено только для того, чтобы помочь понять способ настоящего изобретения и его основные идеи. Кроме того, для специалистов в данной области техники, в соответствии с идеей настоящего изобретения, будут существовать изменения в конкретных способах реализации и областях применения. В заключение, вышеприведенное описание не следует воспринимать как ограничение настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО РЕГУЛИРОВКИ ДОЗИРОВКИ РАЗБРОСА, БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ И НОСИТЕЛЬ ИНФОРМАЦИИ | 2020 |
|
RU2763615C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПЛАНИРОВАНИЯ ОБЛАСТИ ПОЛЕТА БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И ПУЛЬТ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ | 2018 |
|
RU2744226C1 |
| Способ внесения средств биологической защиты растений в виде энтомофагов и устройство дозирования для его осуществления | 2024 |
|
RU2830613C1 |
| СПОСОБ ДОСТАВКИ ГРУЗОВ ПРИ ПОМОЩИ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2024 |
|
RU2838710C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2023 |
|
RU2801013C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2019 |
|
RU2707091C1 |
| СПОСОБ МОНИТОРИНГА СОСТОЯНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ ПРИ ДВИЖЕНИИ ПОЕЗДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2829561C2 |
| АТОМНЫЙ АВИАЦИОНННЫЙ ТРАНСПОРТНЫЙ КОМПЛЕКС, САМОЛЁТ С АТОМНОЙ УСТАНОВКОЙ, СИСТЕМА ПРЕОБРАЗОВАНИЯ ТЕПЛОВОЙ ЭНЕРГИИ САМОЛЁТА, СИСТЕМА ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ САМОЛЁТА С АТОМНОЙ УСТАНОВКОЙ, АЭРОПОЕЗД И СИСТЕМА ПРОТИВОДЕЙСТВИЯ АВАРИЙНЫМ СИТУАЦИЯМ АЭРОПОЕЗДА | 2019 |
|
RU2781119C1 |
| Система сопровождения для беспилотных авиационных транспортных средств | 2015 |
|
RU2692306C2 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2022 |
|
RU2773981C1 |
Группа изобретений относится к способу и устройству управления беспилотным летательным аппаратом для защиты растений. Для осуществления способа выполняют перелет по двум рабочим маршрутам с открытым рабочим соплом. В конце первого участка производят замедление и снижение скорости. Выполняют перелет к началу второго участка определенным образом. Выполняют полет по второму рабочему маршруту. Устройство содержит компоненты, выполненные с возможностью реализации этапов способа. Обеспечивается увеличение качества обработки растений на краях рабочих маршрутов. 2 н. и 8 з.п. ф-лы, 6 ил.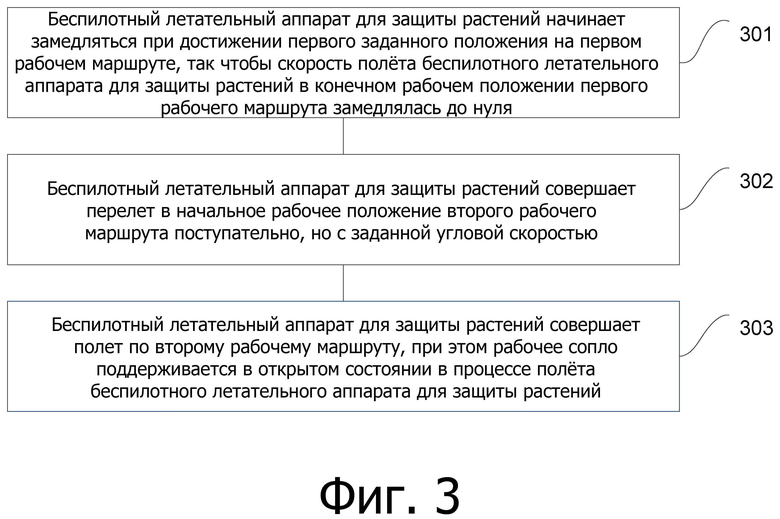
1. Способ управления беспилотным летательным аппаратом для защиты растений, характеризующийся тем, что
начинают замедление полета в первом заданном положении на первом рабочем маршруте, так чтобы скорость полёта беспилотного летательного аппарата для защиты растений в конечном рабочем положении первого рабочего маршрута снизилась до нуля;
выполняют перелёт к начальному рабочему положению второго рабочего маршрута переходным способом движения, при этом переходный способ движения включает в себя движение с заданной угловой скоростью и со скоростью бокового перемещения, причем заданную угловую скорость используют для управления поворотом корпуса указанного беспилотного летательного аппарата, а скорость бокового перемещения используют для управления перемещением указанного беспилотного летательного аппарата; и
выполняют полёт по второму рабочему маршруту,
при этом рабочее сопло поддерживают в открытом состоянии в процессе полёта беспилотного летательного аппарата для защиты растений.
2. Способ по п. 1, в котором указанное начало замедления полета в первом заданном положении на первом рабочем маршруте, так чтобы скорость полёта беспилотного летательного аппарата для защиты растений в конечном рабочем положении первого рабочего маршрута снизилась до нуля, заключается в том, что
когда летательный аппарат долетает до первого заданного положения на первом рабочем маршруте, начинают замедление полета с первым заданным ускорением, так чтобы скорость полёта беспилотного летательного аппарата для защиты растений в конечном рабочем положении первого рабочего маршрута снизилась до нуля, при этом указанное первое заданное положение определяют на основе заданной рабочей скорости беспилотного летательного аппарата для защиты растений и указанного первого ускорения.
3. Способ по п. 1, в котором указанный перелёт к начальному рабочему положению второго рабочего маршрута указанным переходным способом движения, который включает в себя движение с заданной угловой скоростью и со скоростью бокового перемещения, а заданная угловая скорость используется для управления поворотом корпуса указанного беспилотного летательного аппарата, и скорость бокового перемещения используется для управления перемещением указанного беспилотного летательного аппарата, заключается в том, что
выполняют перелёт к указанному начальному рабочему положению второго рабочего маршрута указанным переходным способом движения из конечного рабочего положения первого рабочего маршрута таким образом, чтобы скорость полёта беспилотного летательного аппарата для защиты растений в указанном начальном рабочем положении была снижена до нуля, и
управляют беспилотным летательным аппаратом для защиты растений таким образом, чтобы летательный аппарат совершал вращательное движение с указанной заданной угловой скоростью во время переходного перелёта.
4. Способ по п. 3, в котором перелёт к указанному начальному рабочему положению второго рабочего маршрута переходным способом движения из конечного рабочего положения первого рабочего маршрута таким образом, чтобы скорость полёта беспилотного летательного аппарата для защиты растений в указанном начальном рабочем положении была снижена до нуля, заключается в том, что
выполняют ускоренный перелёт с заданным третьим ускорением для достижения среднего положения на пути между первым рабочим маршрутом и вторым рабочим маршрутом, и
выполняют замедленный перелёт с указанным заданным третьим ускорением от указанного среднего положения в указанное начальное рабочее положение второго рабочего маршрута.
5. Способ по п. 1, в котором при полёте по второму рабочему маршруту
выполняют ускоренный полёт с заданным вторым ускорением до достижения второго заданного положения на втором рабочем маршруте, так чтобы скорость полёта беспилотного летательного аппарата для защиты растений в указанном втором заданном положении была равна заданной рабочей скорости, при этом указанное второе заданное положение определяют на основе указанной заданной рабочей скорости и указанного заданного второго ускорения, и
выполняют полёт с указанной заданной рабочей скоростью.
6. Устройство управления беспилотным летательным аппаратом для защиты растений, содержащее:
компонент первого замедления, выполненный с возможностью обеспечивать начало замедления, когда летательный аппарат достигает первого заданного положения на первом рабочем маршруте, так чтобы скорость полёта беспилотного летательного аппарата для защиты растений в конечном рабочем положении первого рабочего маршрута снижалась до нуля;
компонент переходного перелёта, выполненный с возможностью обеспечивать перелёт в начальное рабочее положение второго рабочего маршрута переходным способом движения, который включает в себя движение с заданной угловой скоростью и со скоростью бокового перемещения, при этом заданная угловая скорость используется для управления поворотом корпуса указанного беспилотного летательного аппарата, а скорость бокового перемещения используется для управления перемещением указанного беспилотного летательного аппарата; и
компонент второго полёта, выполненный с возможностью обеспечивать полёт по второму рабочему маршруту,
при этом рабочее сопло поддерживается в открытом состоянии в процессе полёта беспилотного летательного аппарата для защиты растений.
7. Устройство по п. 6, в котором компонент первого замедления содержит:
подкомпонент первого замедления, выполненный с возможностью начинать замедление с заданным первым ускорением при достижении указанного первого заданного положения первого рабочего маршрута, так чтобы скорость полёта беспилотного летательного аппарата для защиты растений в конечном рабочем положении первого рабочего маршрута замедлялась до нуля, при этом указанное первое заданное положение определяется заданной рабочей скоростью беспилотного летательного аппарата для защиты растений и указанным заданным первым ускорением.
8. Устройство по п. 6, в котором компонент переходного перелёта содержит:
подкомпонент переходного перелёта, выполненный с возможностью обеспечивать перелёт в начальное рабочее положение второго рабочего маршрута переходным способом движения из конечного рабочего положения первого рабочего маршрута, так чтобы скорость полёта беспилотного летательного аппарата для защиты растений в начальном рабочем положении замедлялась до нуля; и
подкомпонент вращательного перемещения, выполненный с возможностью управления беспилотным летательным аппаратом для защиты растений таким образом, чтобы летательный аппарат совершал вращательное движение с указанной заданной угловой скоростью во время переходного перелёта.
9. Устройство по п. 8, в котором подкомпонент переходного перелёта содержит:
элемент ускорения, выполненный с возможностью обеспечивать выполнение ускоренного перелёта с заданным третьим ускорением для достижения среднего положения на пути между первым рабочим маршрутом и вторым рабочим маршрутом; и
элемент замедления, выполненный с возможностью обеспечивать выполнение замедленного перелёта с указанным заданным третьим ускорением из указанного среднего положения в начальное рабочее положение второго рабочего маршрута.
10. Устройство по п. 6, в котором компонент второго полёта содержит:
подкомпонент второго ускорения, выполненный с возможностью обеспечения ускоренного полёта с заданным вторым ускорением для достижения второго заданного положения второго рабочего маршрута, так чтобы скорость полёта беспилотного летательного аппарата для защиты растений во втором заданном положении составляла заданную рабочую скорость, причём второе заданное положение определяется указанной заданной рабочей скоростью и указанным заданным вторым ускорением; и
подкомпонент полёта, выполненный с возможностью обеспечения полёта с указанной заданной рабочей скоростью.
| CN 0102360219 A, 22.02.2012 | |||
| CN 0102360219 A, 22.02.2012 | |||
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ АВТОМАТИЗИРОВАННОЙ АВИАЦИОННОЙ ХИМИЧЕСКОЙ ОБРАБОТКИ РАСТЕНИЙ И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2015 |
|
RU2586142C1 |
| CN 0105045280 A, 11.11.2015 | |||
| CN 0105197243 A, 30.12.2015. | |||

