Область техники, к которой относится изобретение
Настоящее изобретение относится к области беспилотных летательных аппаратов и, более конкретно, к способу планирования области полета беспилотного летательного аппарата, устройству планирования области полета беспилотного летательного аппарата, пульту дистанционному управления, процессору и носителю информации.
Уровень техники
С быстрым развитием науки и технологий беспилотные летательные аппараты широко используют в области защиты сельскохозяйственных культур, аэросъемки, логистики и в других областях.
Перед полетом необходимо запланировать область полета беспилотного летательного аппарата, запланировать маршрут полета в области полета, затем пролететь по области полета в соответствии с маршрутом полета и выполнить соответствующие полетные операции, такие как аэрофотосъемка и распыление.
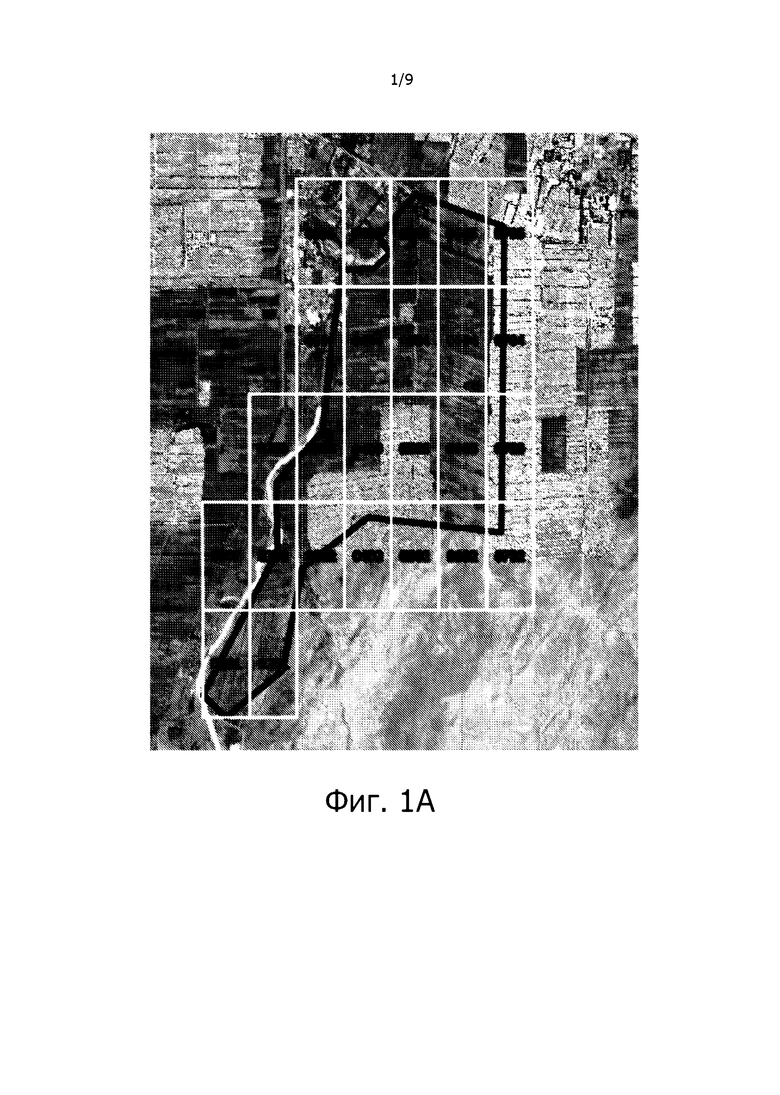
Как показано на фиг. 1А, область полета беспилотного летательного аппарата обычно планируют в виде правильного прямоугольника, направленного вдоль направления с севера на юг. Этот способ планирования подходит для крупномасштабной географической области, например, района города, деревни и т.п.
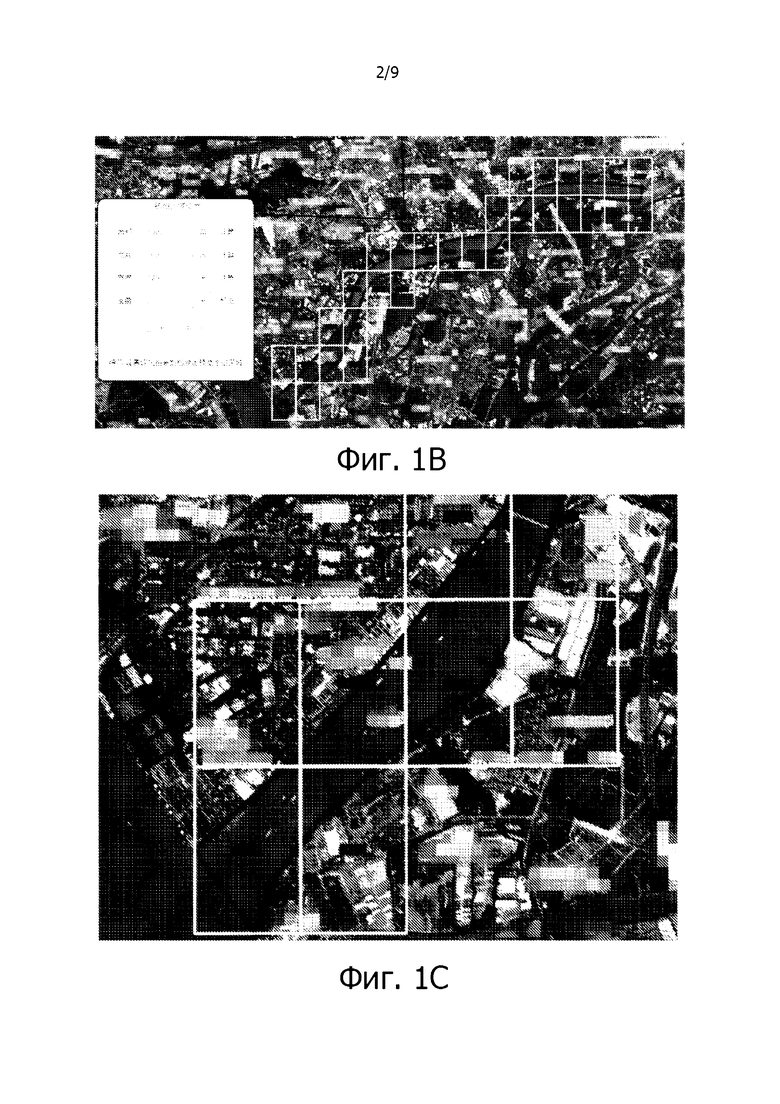
Как показано на фиг. 1В, для географической области, такого как река, если применяют вышеупомянутый способ планирования для планирования области полета, как показано на фиг. 1С, то так как географическая область в виде полосы является искривленной, то в качестве области полета рассматривают больше областей, чем географическая область в виде полосы, так что увеличивается число полетных операций беспилотного летательного аппарата, что приводит к увеличению затрат на операции во время полета.
Раскрытие сущности изобретения
Ввиду вышеупомянутых задач, чтобы решить вышеупомянутые задачи, заключающиеся в том, что эти области рассматривают как область полета во время планирования области полета, и число полетных операций увеличивается, что приводит к увеличению затрат на операции во время полета, в вариантах осуществления настоящего изобретения предложен способ и устройство для планирования области полета беспилотного летательного аппарата и пульт дистанционное управления.
В соответствии с аспектом вариантов осуществления настоящего изобретения предложен способ планирования области полета беспилотного летательного аппарата, который может включать в себя следующее:
получают множество точек выборки, кривых, прямых линий или блоков географической области в виде полосы;
определяют целевой шаблон наблюдения в соответствии с множеством точек отсчета, кривых, прямых линий или блоков; и
генерируют область полета для географической области в виде полосы в соответствии с общим направлением целевого шаблона наблюдения.
Как вариант, этап, на котором определяют целевой шаблон наблюдения в соответствии с множеством точек выборки, кривых, прямых линий или блоков, может включать в себя следующее:
множество точек выборки соединяют в порядке выборки, чтобы получить целевой шаблон наблюдения.
Как вариант, этап, на котором генерируют область полета для географической области в виде полосы в соответствии с общим направлением целевого шаблона наблюдения, может включать в себя следующее:
вдоль общего направления целевого шаблона наблюдения генерируют линию тренда; и
генерируют область полета для географической области в виде полосы, принимая в качестве ориентира позиционирования линию тренда.
Как вариант, этап, на котором генерируют линию тренда вдоль общего направления целевого шаблона наблюдения, может включать в себя следующее:
в целевом шаблоне наблюдения определяют опорную точку; и
вдоль общего направления целевого шаблона наблюдения генерируют линию тренда, проходящую через опорную точку.
Как вариант, опорная точка может представлять собой среднюю точку, а этап, на котором определяют опорную точку в целевом шаблоне наблюдения, может включать в себя следующее:
запрашивают координаты множества точек выборки; и
в качестве координат средней точки вычисляют среднее значение координат множества точек выборки.
Как вариант, этап, на котором вдоль общего направления целевого шаблона наблюдения генерируют линию тренда, проходящую через опорную точку, может включать в себя следующее:
экстремальным точкам присваивают экстремальные координаты целевого шаблона наблюдения;
соединяют экстремальные точки для получения сегмента опорной линии; и
через опорную точку генерируют линию тренда, параллельную сегменту опорной линии.
Как вариант, область полета может включать в себя одну или несколько подобластей, а этап, на котором генерируют область полета для географической области в виде полосы, принимая в качестве ориентира позиционирования линию тренда, может включать в себя следующее:
вычисляют ширину пилотирования, охватывающую целевой шаблон наблюдения;
вычисляют длину пилотирования беспилотного летательного аппарата, летящего в пределах ширины пилотирования; и
берут длину пилотирования, а ширину пилотирования последовательно расширяют на линии тренда для формирования подобласти одной полетной операции.
Как вариант, этап, на котором вычисляют ширину пилотирования, охватывающую целевой шаблон наблюдения, может включать в себя следующее:
вычисляют вертикальное расстояние от каждой точки в целевом шаблоне наблюдения до линии тренда; и
в качестве ширины пилотирования устанавливают удвоенную сумму максимального вертикального расстояния и заданного буферного расстояния.
Как вариант, этап, на котором берут длину пилотирования, а ширину пилотирования последовательно расширяют на линии тренда для формирования подобласти одной полетной операции, может включать в себя следующее:
задают линию тренда в качестве центральной линии рабочей подобласти;
на линии тренда последовательно определяют рабочую начальную точку;
длину пилотирования берут от рабочей начальной точки, и последовательно определяют рабочую конечную точку, чтобы получить сегмент центральной линии; и
половину ширины пилотирования соответственно последовательно расширяют в вертикальном направлении сегмента центральной линии, чтобы получить рабочую подобласть одной полетной операции.
В соответствии с другим аспектом вариантов осуществления настоящего изобретения предложено устройство планирования области полета беспилотного летательного аппарата, которое может включать в себя следующее:
компонент получения, выполненный с возможностью получать множество точек выборки, кривых, прямых линий или блоков географической области в виде полосы;
компонент определения целевого шаблона наблюдения, выполненный с возможностью определять целевой шаблон наблюдения в соответствии с множеством точек выборки, кривых, прямых линий или блоков; и
компонент генерации области полета, выполненный с возможностью генерировать область полета для географической области в виде полосы в соответствии с общим направлением целевого шаблона наблюдения.
Как вариант, компонент определения целевого шаблона наблюдения может включать в себя:
подкомпонент, соединяющий точки выборки, выполненный с возможностью соединять множество точек выборки в порядке выборки для получения целевого шаблона наблюдения.
Как вариант, компонент генерации области полета, может включать в себя:
подкомпонент генерации линии тренда, выполненный с возможностью генерировать линию тренда вдоль общего направления целевого шаблона наблюдения; и
подкомпонент генерации ориентира, выполненный с возможностью генерировать область полета для географической области в виде полосы, принимая в качестве ориентира позиционирования линию тренда.
Как вариант подкомпонент генерации линии тренда, может включать в себя:
блок определения опорной точки, выполненный с возможностью определять опорную точку в целевом шаблоне наблюдения; и
блок генерации опорной точки, выполненный с возможностью генерировать линию тренда, проходящую через опорную точку, вдоль общего направления целевого шаблона наблюдения.
Как вариант, опорная точка может представлять собой среднюю точку, а блок определения опорной точки может включать в себя:
подблок запроса координат, выполненный с возможностью запрашивать координаты множества точек выборки; и
подблок вычисления среднего значения, выполненный с возможностью вычислять среднее значение координат множества точек выборки в качестве координат средней точки.
Как вариант, блок генерации опорной точки может включать в себя
подблок задания экстремальных точек, выполненный с возможностью присваивать экстремальные координаты целевого шаблона наблюдения экстремальным точкам;
подблок соединения экстремальных точек, выполненный с возможностью соединять экстремальные точки для получения сегмента опорной линии; и
подблок генерации параллельной линии, выполненный с возможностью генерировать линию тренда, параллельную сегменту опорной линии, через опорную точку.
Как вариант, область полета может включать в себя одну или несколько подобластей, а подкомпонент генерации ориентира может включать в себя:
блок вычисления ширины пилотирования, выполненный с возможностью вычислять ширину пилотирования, охватывающую целевой шаблон наблюдения;
блок вычисления длины пилотирования, выполненный с возможностью вычислять длину пилотирования беспилотного летательного аппарата, летящего в пределах ширины пилотирования; и
блок генерации подобласти пилотирования, выполненный с возможностью брать длину пилотирования и последовательно расширять ширину пилотирования на линии тренда для формирования подобласти пилотирования одной полетной операции.
Как вариант, блок вычисления ширины пилотирования может включать в себя:
подблок вычисления вертикального расстояния, выполненный с возможностью вычислять вертикальное расстояние от каждой точки в целевом шаблоне наблюдения до линии тренда; и
подблок установки ширины пилотирования, выполненный с возможностью устанавливать в качестве ширины пилотирования удвоенную сумму максимального вертикального расстояния и заданного буферного расстояния.
Как вариант, блок генерации подобласти может включать в себя:
подблок задания центральной линии, выполненный с возможностью задавать линию тренда в качестве центральной линии подобласти;
подблок определения рабочей начальной точки, выполненный с возможностью последовательно определять рабочую начальную точку на линии тренда;
подблок определения рабочей конечной точки, выполненный с возможностью брать длину пилотирования от рабочей начальной точки и последовательно определять рабочую конечную точку для получения сегмента центральной линии; и
подблок вертикального расширения, выполненный с возможностью последовательно соответственно расширять половину ширины пилотирования в вертикальном направлении сегмента центральной линии, чтобы получить рабочую подобласть одной полетной операции.
В соответствии с другим аспектом вариантов осуществления настоящего изобретения предложен пульт дистанционного управления, который может включать в себя:
один или несколько процессоров; и
команды на одном или нескольких читаемых компьютером носителях информации, при исполнении которых одним или несколькими процессорами пульт дистанционного управления выполняет один или несколько из вышеупомянутых способов.
В соответствии с другим аспектом вариантов осуществления настоящего изобретения предложен процессор. Процессор может быть выполнен с возможностью запускать программу, причем программу запускают для того, чтобы выполнить способ планирования области полета беспилотного летательного аппарата.
В соответствии с другим аспектом вариантов осуществления настоящего изобретения предложен носитель информации. Носитель информации может включать в себя сохраненную на нем программу, причем при запуске этой программы устройство, в котором расположен носитель информации, выполняет способ планирования области полета беспилотного летательного аппарата.
Варианты осуществления изобретения включают в себя следующие преимущества:
В вариантах осуществления настоящего изобретения получают множество точек выборки, кривых, прямых линий или блоков географической области в виде полосы, определяют целевой шаблон наблюдения в соответствии с множеством точек выборки, кривых, прямых линий или блоков, и генерируют область полета для географической области в виде полосы в соответствии с общим направлением целевого шаблона наблюдения. Настоящее изобретение выполняет адаптацию к общему направлению географической области в виде полосы для получения области полета и является очень гибким. Настоящее изобретение нацелено на географическую область в виде полосы, так что области, отличные от географической области в виде полосы, не рассматривают в качестве области полета, чтобы сократить число полетных операций беспилотного летательного аппарата, тем самым, сокращая эксплуатационные затраты и повышая эффективность работы.
Краткое описание чертежей
На фиг. 1А-1С приведены диаграммы, показывающие пример планирования текущей области полета;
на фиг. 2 приведена блок-схема последовательности операций, показывающая этапы способа планирования области полета беспилотного летательного аппарата в соответствии с вариантом осуществления настоящего изобретения;
на фиг. 3А-3Н приведены диаграммы, показывающие пример планирования области полета, представляющей собой географическую область в виде полосы, в соответствии с вариантом осуществления настоящего изобретения;
на фиг. 4 приведена структурная блок-схема устройства для планирования области полета беспилотного летательного аппарата в соответствии с вариантом осуществления настоящего изобретения; и
на фиг. 5 показана принципиальная схема пульта дистанционного управления в соответствии с вариантом осуществления изобретения.
Осуществление изобретения
Чтобы вышеуказанные цели, признаки и преимущества настоящего изобретения стали более очевидными и понятными, настоящее изобретение подробно описано ниже со ссылкой на чертежи и определенные способы реализации.
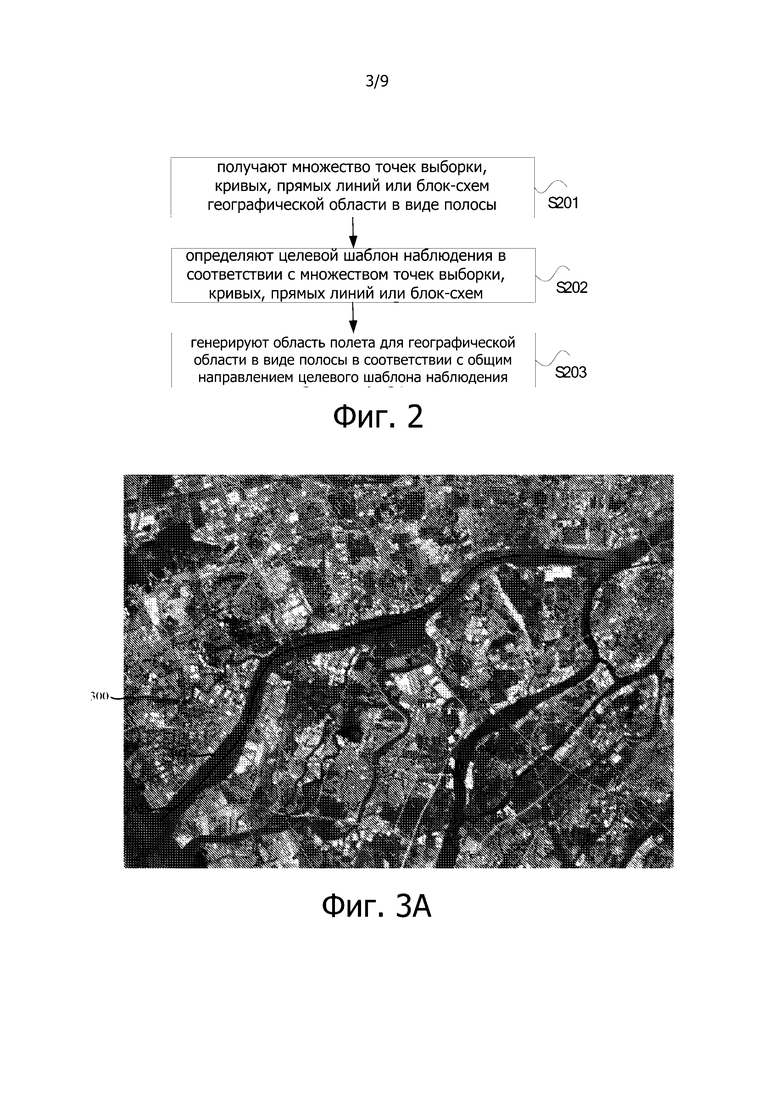
Со ссылкой на фиг. 2, на ней приведена блок-схема последовательности операций, показывающая этапы способа планирования области полета беспилотного летательного аппарата в соответствии с вариантом осуществления настоящего изобретения. В частности, способ может включать в себя следующие этапы.
На этапе 201 получают множество точек выборки, кривых, прямых линий или блоков географической области в виде полосы.
В конкретной реализации вариант осуществления этапов способа планирования области полета беспилотного летательного аппарата в соответствии с настоящим изобретением может быть применен к пульту дистанционного управления беспилотного летательного аппарата для управления терминалом так, чтобы выполнять полет, защиту сельскохозяйственных культур и другие операции беспилотного летательного аппарата.
В других вариантах осуществления вариант осуществления этапов способа планирования области полета беспилотного летательного аппарата также может быть применен к терминалам ПК, облачным серверам и т.п.
Беспилотный летательный аппарат может относиться к воздушному судну, использующему беспроводной пульт дистанционного управления, выполненное с возможностью защиты сельскохозяйственных культур и наблюдения. Беспилотный летательный аппарат, в общем, не оснащен оператором, использует аэродинамику для обеспечения воздушного судна требуемой подъемной силой и может летать автоматически или с использованием дистанционного управления.
Кроме того, пульт дистанционного управления может представлять собой мобильный терминал, на котором установлена управляющая программа, например, мобильный телефон. На данный момент пульт дистанционного управления также называют наземной станцией.
Пульт дистанционного управления также может представлять собой отдельное устройство с такими компонентами, как процессор, микросхема управления питанием, батарея, интерфейс универсальной последовательной шины (USB), кнопка и джойстик.
Линия передачи данных может получить доступ к интерфейсу USB для подключения мобильного терминала для проведения операций. Компонент пульта дистанционного управления может включать в себя левый джойстик и правый джойстик, выполненные с возможностью дистанционно управлять положением беспилотного летательного аппарата в полете. Компонент кнопки может включать в себя пошаговую кнопку и функциональную кнопку, выполненные с возможностью шаг за шагом управлять положением беспилотного летательного аппарата в полете и соответствующими операциями беспилотного летательного аппарата.
В варианте осуществления настоящего изобретения электронная карта может отображаться на пульте дистанционного управления, а наблюдаемая область может быть отображена на электронной карте. Наблюдаемая область может представлять собой географическую область в виде полосы, такую как река или дорога. Пользователь может нарисовать шаблон наблюдения в географической области в виде полосы, выполняя такие операции, как, например, касания. Конечные точки и точки перегиба выбирают в качестве точек выборки в шаблоне наблюдения. Пользователь может непосредственно отметить область наблюдения с использованием кривой, прямой линии, блоков или подобного на спутниковой карте.
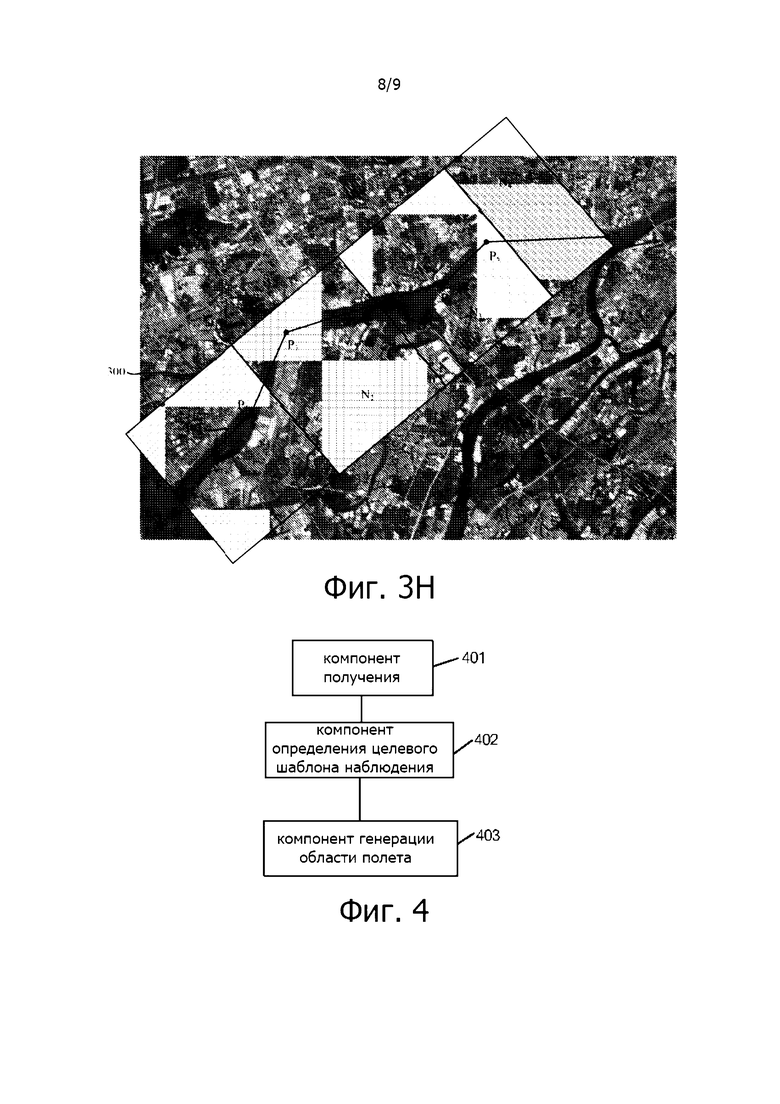
Например, как показано на фиг. 3А, на электронной карте 300 имеется река 301 в виде полосы (географическая область в виде полосы), и пользователь может нарисовать линию 302 наблюдения (шаблон наблюдения) на реке 301, выполняя операции касанием.
Конечно, способ получения точек выборки является только примером. При реализации варианта осуществления настоящего изобретения способ получения других точек выборки может быть задан в соответствии с фактическими условиями, например, пользователь собирает точки выборки с использованием устройства наблюдения и т.п. Это не ограничено вариантом осуществления настоящего изобретения. Помимо этого, в дополнение к способу получения точек выборки специалисты в области техники также могут приспособить другие способы получения точек выборки в соответствии с фактическими потребностями, которые не ограничены в варианте осуществления настоящего изобретения.
На этапе 202 определяют целевой шаблон наблюдения в соответствии с множеством точек выборки, кривых, прямых линий или блоков.
В конкретной реализации точки выборки могут быть преобразованы в обычный целевой шаблон наблюдения в соответствии с определенным правилом рисования.
В варианте осуществления настоящего изобретения этап 202 может включать в себя следующие подэтапы:
На подэтапе S11 множество точек выборки соединяют в порядке рисования для получения целевого шаблона наблюдения.
В варианте осуществления настоящего изобретения множество точек выборки могут быть последовательно соединены в соответствии с порядком выборки, и множество точек выборки последовательно соединяют для получения целевого шаблона наблюдения, такого как ломаная линия.
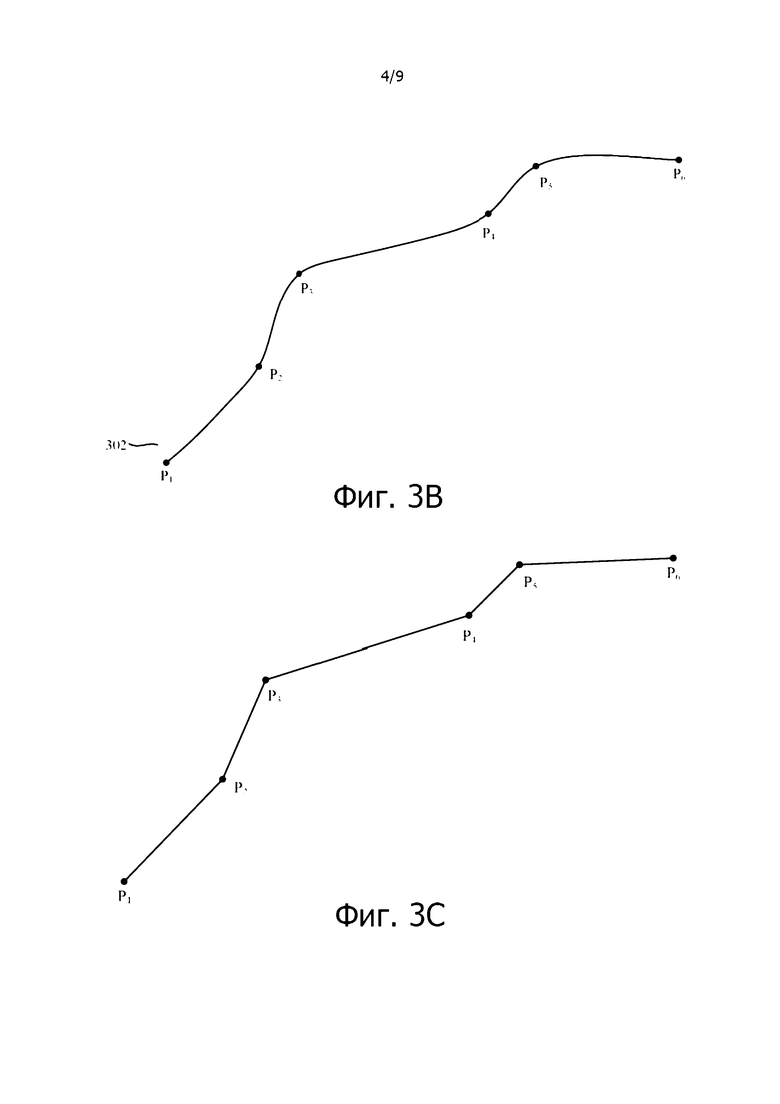
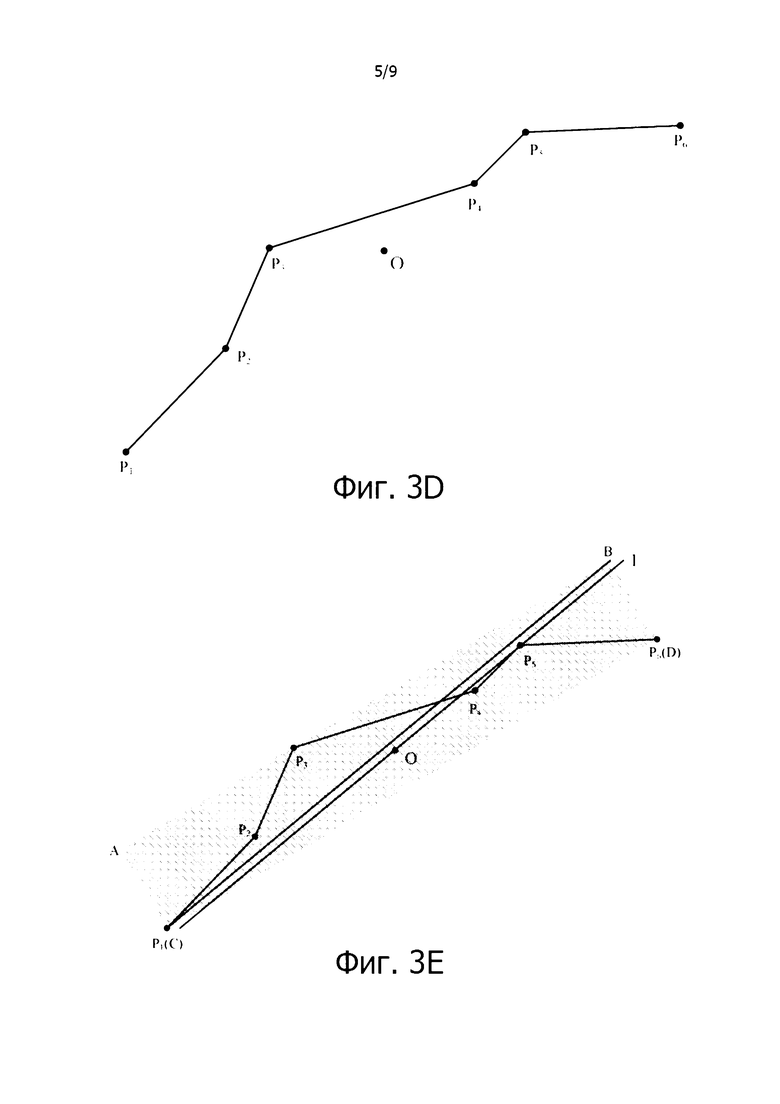
Например, как показано на фиг. 3В, для модели 302 наблюдения в качестве точек выборки могут быть выбраны конечные точки P1 и P6 и точки перегиба P2, P3, P4 и P5.
Как показано на фиг. 3С, последовательно соединяя точки выборки P1, P2, P3, P4, P5 и P6, в качестве целевого шаблона наблюдения можно получить ломаную линию P1P2P3P4P5P6.
Конечно, вышеприведенный шаблон наблюдения и целевой шаблон наблюдения являются всего лишь примерами. При реализации варианта осуществления настоящего изобретения в соответствии с фактическими условиями могут быть заданы другие шаблоны наблюдения и целевые шаблоны наблюдения. Например, шаблон наблюдения представляет собой контур географической области в виде полосы и искривленный замкнутый рисунок. Целевой шаблон наблюдения представляет собой прямоугольник, неправильный многоугольник, смоделированную кривую, отдельные точки, множество точек и т.п., что не ограничено вариантом осуществления настоящего изобретения. Помимо этого, в дополнение к шаблону наблюдения и целевому шаблону наблюдения специалисты в области техники также могут приспособить другие шаблоны наблюдения и целевые шаблоны наблюдения в соответствии с фактическими потребностями, которые не ограничены в варианте осуществления настоящего изобретения.
На этапе 203 генерируют область полета для географической области в виде полосы в соответствии с общим направлением целевого шаблона наблюдения.
В варианте осуществления настоящего изобретения область полета может быть сформирован вдоль общего направления целевого шаблона наблюдения, то есть область полета, охватывающая географическую область в виде полосы, генерируют вдоль общего направления географической области в виде полосы.
В варианте осуществления настоящего изобретения этап 203 может включать в себя следующие подэтапы:
На подэтапе S21 вдоль общего направления целевого шаблона наблюдения генерируют линию тренда.
В варианте осуществления настоящего изобретения линия тренда может быть сформирована вдоль общего направления целевого шаблона наблюдения, чтобы определить общее направление географической области в виде полосы. Например, линия тренда может представлять собой прямую линию или смоделированную кривую.
В варианте осуществления настоящего изобретения подэтап S21 также может включать в себя следующие подэтапы.
На подэтапе S211 в целевом шаблоне наблюдения определяют опорную точку.
В конкретной реализации в соответствии с характеристиками целевого шаблона наблюдения в качестве опорной точки в целевом шаблоне наблюдения может быть определена опорная точка, например, центральная точка тяжести, центральная точка или центр вписанной окружности.
В примере варианта осуществления настоящего изобретения опорная точка представляет собой среднюю точку, а подэтап S211 также может включать в себя следующие подэтапы.
На подэтапе S2111 запрашивают координаты множества точек выборки. Координаты точки выборки могут представлять собой географические координаты, полученные от фактического измерительного устройства, или могут представлять собой географические координаты, полученные из карты.
На подэтапе S2112 в качестве координат средней точки вычисляют среднее значение координат множества точек выборки.
В настоящем примере для целевого шаблона наблюдения, такого как ломаная линия, для определения положения средней точки в качестве координат средней точки могут использовать среднее значение координат каждой точки выборки.
Например, как показано на фиг. 3D, если координаты точки P1 равны (x1, y1), координаты точки P2 равны (x2, y2), координаты точки P3 равны (x3, y3), координаты точки P4 равны (x4, y4), координаты точки P5 равны (x5, y5), координаты точки P6 равны (x6, y6), то координаты средней точки O равны (xo, yo), xo=(x1+x2+x3+x4+x5+x6)/6 и yo=(y1+y2+y3+y4+y5+y6)/6.
На подэтапе S212 вдоль общего направления целевого шаблона наблюдения генерируют линию тренда, проходящую через опорную точку.
В варианте осуществления настоящего изобретения линия тренда может быть сформирована вдоль общего направления целевого шаблона наблюдения через опорную точку.
В примере осуществления настоящего изобретения подэтап S212 также может включать в себя следующие подэтапы.
На подэтапе S2121 экстремальным точкам присваивают экстремальные координаты целевого шаблона наблюдения.
В конкретной реализации ограничивающий прямоугольник, генерируемый целевым шаблоном наблюдения, в общем, представляет собой минимальный ограничивающий прямоугольник (MBR), экстремальные координаты целевого шаблона наблюдения получают от угловой точки ограничивающего прямоугольника, например, максимальные координаты X, минимальные координаты X, максимальные координаты Y или минимальные координаты Y, и экстремальные координаты объединяют в качестве экстремальной точки.
Например, максимальные координаты X и максимальные координаты Y присваивают одной экстремальной точке, минимальные координаты X и минимальные координаты Y присваивают другой экстремальной точке.
На подэтапе S2122 соединяют экстремальные точки для получения сегмента опорной линии.
В практических применениях экстремальные точки могут быть соединены, чтобы представить общее направление целевого шаблона наблюдения в качестве сегмента опорной линии.
На подэтапе S2123 генерируют линию тренда, проходящую через опорную точку и параллельную сегменту опорной линии.
В настоящем примере после прохождения через опорную точку в качестве линии тренда может быть сгенерирован сегмент линии, параллельный сегменту опорной линии.
Например, как показано на фиг. 3Е, для целевого шаблона наблюдения P1P2P3P4P5P6 может быть сформирован ограничивающий прямоугольник ABCD, точка P1 выборки совпадает с точкой С, а точка P6 выборки совпадает с точкой D.
Угловой коэффициент между точкой P1 выборки и точкой P6 выборки представляет собой общее направление целевого шаблона наблюдения P1P2P3P4P5P6, угловой коэффициент между диагональными точками BC соответствует общему направлению, а угловой коэффициент между диагональными точками AD не совпадает с общим направлением, так что в качестве сегмента опорной линии берут диагональную линию BC, а сегмент 1 линии, параллельный диагональной линии BC, проводят в виде линии тренда через среднюю точку О.
Кроме того, при формировании линии тренда предполагается, что диагональная точка является первой угловой точкой и второй угловой точкой, а линия тренда имеет первую точку позиционирования и вторую точку позиционирования.
Тогда, можно вычислить первый угловой коэффициент линии, соединяющей первую угловую точку со средней точкой, и определяют, превосходит ли первый угловой коэффициент значение 1. Если превосходит, то вертикальные координаты первой угловой точки присваивают вертикальным координатам первой точки позиционирования. Если нет, то горизонтальные координаты первой угловой точки присваивают горизонтальным координатам первой точки позиционирования.
Аналогично, можно вычислить второй угловой коэффициент линии, соединяющей вторую угловую точку со средней точкой, и определяют, превосходит ли второй угловой коэффициент значение 1. Если превосходит, то вертикальные координаты второй угловой точки присваивают вертикальным координатам второй точки позиционирования. Если нет, то горизонтальные координаты второй угловой точки присваивают горизонтальным координатам второй точки позиционирования.
Так как угловой коэффициент между первой точкой позиционирования и второй точкой позиционирования является таким же, как угловой коэффициент сегмента опорной линии, то в сочетании с координатами средней точки можно вычислить координаты первой точки позиционирования и второй точки позиционирования для определения линии тренда.
На подэтапе S22 генерируют область полета для географической области в виде полосы, принимая в качестве ориентира позиционирования линию тренда.
В конкретной реализации линию тренда можно использовать в качестве ориентира позиционирования первой области полета, тем самым, генерируют область полета, так что полетная операция соответствует общему направлению целевого шаблона наблюдения, тем самым соответствуя общему направлению географической области в виде полосы.
В одном варианте осуществления настоящего изобретения область полета включает в себя одну или несколько подобластей, а подэтап S22 может также включать в себя следующие подэтапы.
На подэтапе S221 вычисляют ширину пилотирования, охватывающую целевой шаблон наблюдения.
В практических применениях можно вычислить ширину пилотирования, покрывающую целевой шаблон наблюдения, чтобы охватить географическую область в виде полосы.
В примере осуществления настоящего изобретения подэтап S221 может включать в себя следующие подэтапы.
На подэтапе S2211 вычисляют вертикальное расстояние от каждой точки в целевого шаблона наблюдения до линии тренда.
На подэтапе S2212 в качестве ширины пилотирования устанавливают удвоенную сумму максимального вертикального расстояния и заданного буферного расстояния.
В настоящем примере пользователь может предварительно задать буферное расстояние в соответствии с географической областью в виде полосы, так чтобы ширина пилотирования могла охватывать географическую область в виде полосы.
Например, для реки может быть задано буферное расстояние 25 метров.
В конкретной реализации может быть вычислено вертикальное расстояние от каждой точки в целевого шаблона наблюдения до линии тренда. Если целевой шаблон наблюдения представляет собой ломаную линию, то может быть вычислено вертикальное расстояние от каждой точки выборки до линии тренда.
На основе вертикального расстояния с наибольшей медианой среди всех вертикальных расстояний в сочетании с буферным расстоянием оно может составлять половину ширины пилотирования, а удвоенное его значение может быть задано в качестве ширины пилотирования.
Например, предполагается, что в целевом шаблоне наблюдения P1P2P3P4P5P6 вертикальные расстояния точек выборки P1, P2, P3, P4, P5 и P6 до линии 1 тренда соответственно равны q1, q2, q3, q4, q5 и q6, где значение q3 является наибольшим, буферное расстояние равно H, а ширина пилотирования равна d = 2*(q3+H).
Конечно, способ вычисления вышеупомянутой ширины пилотирования является только примером. При реализации варианта осуществления настоящего изобретения способ вычисления других значений ширины пилотирования может быть задан в соответствии с фактическими условиями. Например, в качестве ширины пилотирования используют удвоенное вертикальное расстояние с наибольшей медианой среди всех вертикальных расстояний, в качестве ширины пилотирования берут сумму вертикальных расстояний с наибольшими значениями с обеих сторон от линии тренда, и на основе суммы вертикальных расстояний с наибольшими значениями с обеих сторон от линии тренда в сочетании с удвоенным буферным расстоянием используют ее в качестве ширины пилотирования, и т.д., что не ограничено вариантом осуществления настоящего изобретения.
На подэтапе S222 вычисляют длину пилотирования беспилотного летательного аппарата, летящего в пределах ширины пилотирования.
В конкретной реализации определяют площадь, в которой может летать беспилотный летательный аппарат в данный момент времени, и поэтому, разделяя площадь на ширину пилотирования, можно получить длину пилотирования однократного полета.
На подэтапе S223 берут длину пилотирования, а ширину пилотирования последовательно расширяют на линии тренда для формирования подобласти одной полетной операции.
Расширение выполняют на основе линии тренда, а ширина расширения равна ширине пилотирования, так что полученная подобласть может охватывать часть целевого шаблона наблюдения, тем самым, покрывая часть географической области в виде полосы. Множество подобластей накладывают друг на друга в виде всей области полета.
В примере осуществления настоящего изобретения подэтап S223 также может включать в себя следующие подэтапы.
На подэтапе S2231 задают линию тренда в качестве центральной линии рабочей подобласти.
В настоящем примере линия тренда представляет собой центральную линию всей области полета, а также центральную линию каждой подобласти, а область полета (включая каждую подобласть) симметрична относительно линии тренда.
На подэтапе S2232 на линии тренда последовательно определяют рабочую начальную точку.
В конкретной реализации рабочая начальная точка линии тренда представляет собой первую точку проекции целевого шаблона наблюдения на линию тренда или рабочую конечную точку предыдущей подобласти.
Например, если целевой шаблон наблюдения представляет собой ломаную линию, то точка первого целевого шаблона наблюдения, спроецированного на линию тренда, представляет собой первую рабочую начальную точку.
На подэтапе S2233 длину пилотирования берут от рабочей начальной точки, и последовательно определяют рабочую конечную точку, чтобы получить сегмент центральной линии.
В практических применениях рабочая конечная точка представляет собой точку на линии тренда, расположенную от рабочей начальной точки на расстоянии, равном длине пилотирования, или последнюю точку проекции целевого шаблона наблюдения на линию тренда.
Например, если целевой шаблон наблюдения представляет собой ломаную линию, то последняя точка целевого шаблона наблюдения, спроецированного на линию тренда, представляет собой последнюю рабочую начальную точку.
На линии тренда сегмент линии между рабочей начальной точкой и рабочей конечной точкой представляет собой подсегмент центровой линии.
На этапе S2234 половину ширины пилотирования соответственно последовательно расширяют в вертикальном направлении сегмента центральной линии, чтобы получить рабочую подобласть одной полетной операции.
Если ширину пилотирования получают путем добавления удвоенного буферного расстояния на основе вертикального расстояния с наибольшей медианой среди всех вертикальных расстояний, то половина ширины пилотирования может быть расширена на основе подсегмента центровой линии, чтобы гарантировать, что может быть охвачена целевая область наблюдения.
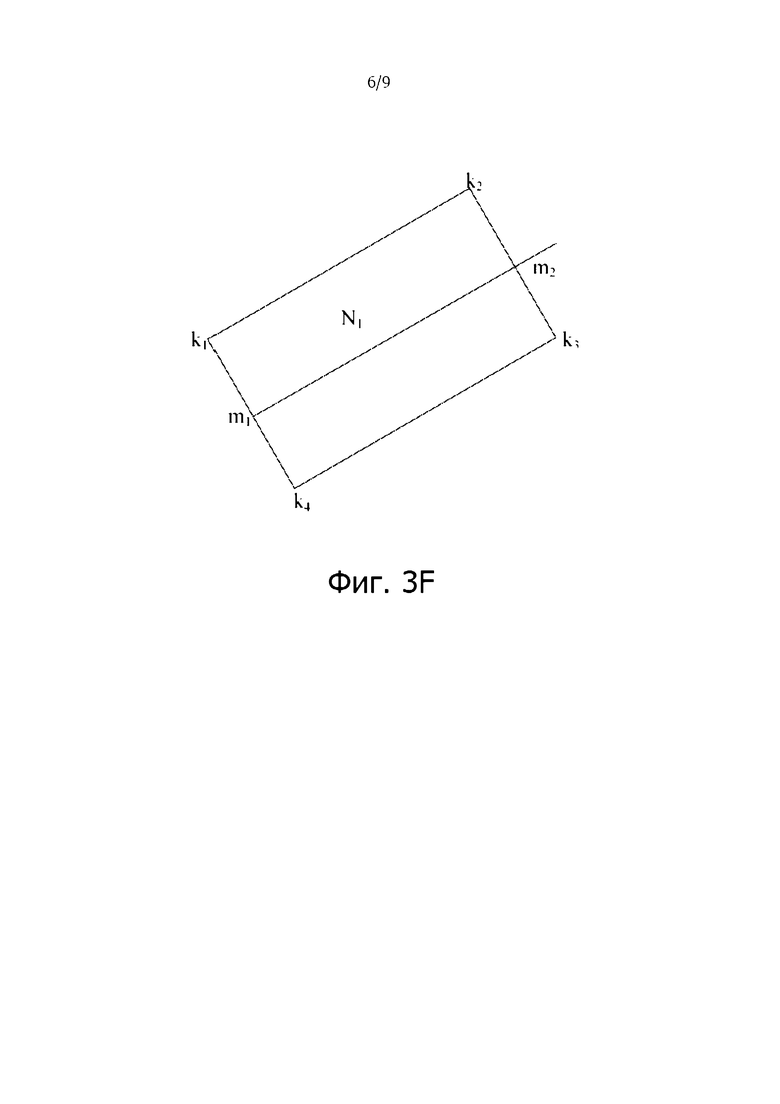
Например, как показано на фиг. 3F, точку m1 первой точки P1 выборки, спроецированной на линию 1 тренда, используют в качестве первой начальной точки, точку m2, расположенную от начальной точки m1 на линии 1 тренда на расстоянии, равном длине пилотирования, используют в качестве рабочей конечной точки, а подобласть N1 может быть получена путем расширения половины ширины пилотирования на d/2 = q3+H в вертикальном направлении подсегмента m1m2 центральной линии.
Кроме того, координаты рабочей начальной точки m1 и рабочей конечной точки m2 известны, и ширина пилотирования d/2 известна. Предполагается, что k1, k2, k3 и k4 - четыре угловые точки подобласти N1, расстояние k1m1 равно d/2, а произведение углового коэффициента k1m1 и углового коэффициента m1m2 равно -1. Объединяя эти два условия, можно вычислить координаты точки k1. Аналогично, можно вычислить координаты точек k2, k3 и k4 , тем самым определяя подобласть N1.
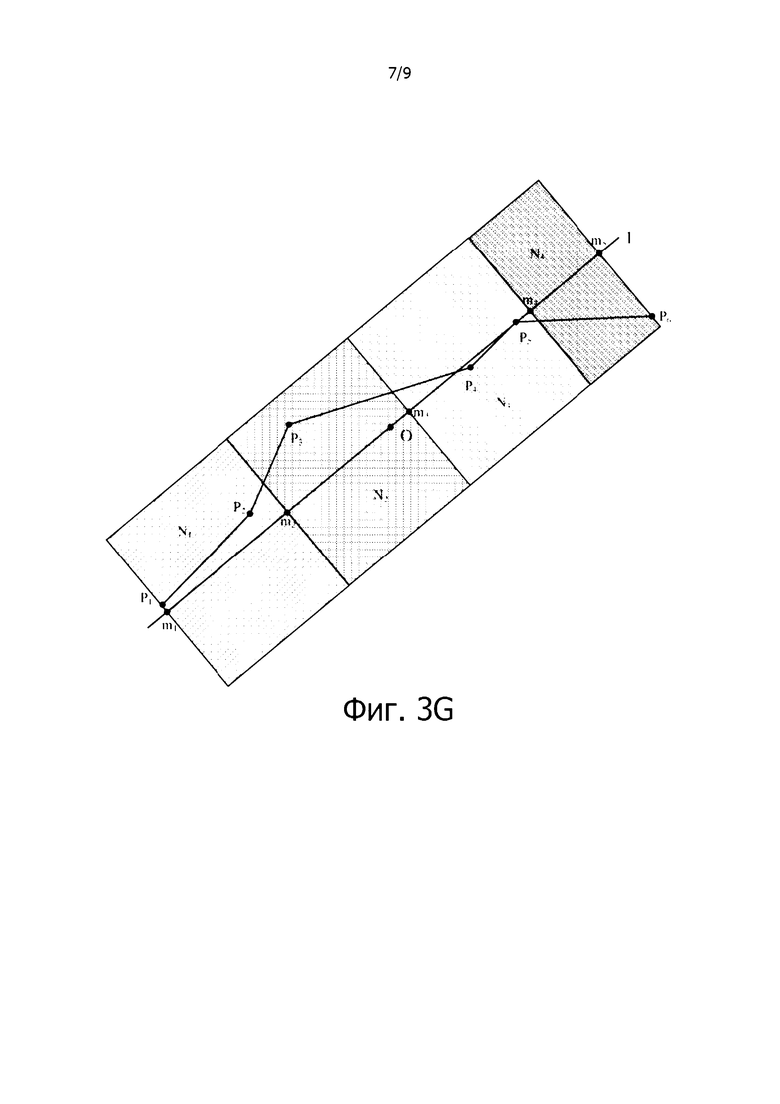
Аналогично, как показано на фиг. 3G, получают подобласть N2 с точкой m2 в качестве рабочей начальной точки и точкой m3 в качестве рабочей конечной точки; получают подобласть N3 с точкой m3 в качестве рабочей начальной точки и точкой m4 в качестве рабочей конечной точки; и получают подобласть N4 с точкой m4 в качестве рабочей начальной точки и точкой m5 (точка последней точки P6 выборки, спроецированной на линию 1 тренда) в качестве рабочей конечной точки.
Как показано на фиг. 3H, на электронной карте 300 N1, N2, N3 и N4 составляют всю область полета, покрывающую реку 301.
Конечно, вышеприведенный способ получения подобласти является только примером. При реализации варианта осуществления настоящего изобретения в соответствии с фактическими условиями могут быть заданы другие способы получения подобласти. Например, с обеих сторон вертикального направления подсегмента центральной линии расширение выполняют в соответствии с максимальным вертикальным расстоянием или суммой максимального вертикального расстояния и буферного расстояния соответственно, что не ограничено вариантом осуществления настоящего изобретения.
В вариантах осуществления настоящего изобретения получают множество точек выборки, кривых, прямых линий или блоков географической области в виде полосы, определяют целевой шаблон наблюдения в соответствии с множеством точек выборки, кривых, прямых линий или блоков, и формируют область полета для географической области в виде полосы в соответствии с общим направлением целевого шаблона наблюдения. Настоящее изобретение приспосабливается к общему направлению географической области в виде полосы, чтобы сгенерировать область полета, и является очень гибким. Настоящее изобретение нацелено на географическую область в виде полосы, так что области, отличные от географической области в виде полосы, не рассматривают в качестве области полета, чтобы сократить число полетных операций беспилотного летательного аппарата, тем самым сокращая эксплуатационные затраты.
Необходимо отметить, что для простоты описания варианты осуществления способа выражены как последовательность комбинаций действий, но специалисты в области техники должны понимать, что варианты осуществления изобретения не ограничены описанной последовательностью действий, потому что определенные этапы могут быть выполнены в других последовательностях или параллельно в соответствии с вариантами осуществления настоящего изобретения. Далее, специалисты в области техники также должны понимать, что описанные в спецификации варианты осуществления являются предпочтительными вариантами осуществления, а участвующие действия не обязательно требуются в вариантах осуществления настоящего изобретения.
Со ссылкой на фиг. 4 приведена структурная блок-схема устройства для планирования области полета беспилотного летательного аппарата в соответствии с вариантом осуществления настоящего изобретения. В частности, устройство может включать в себя следующие компоненты.
Компонент 401 получения выполнен с возможностью получать множество точек выборки, кривых, прямых линий или блоков географической области в виде полосы.
Компонент 402 определения целевого шаблона наблюдения выполнен с возможностью определять целевой шаблон наблюдения в соответствии с множеством точек выборки, кривых, прямых линий или блоков.
Компонент 403 генерации области полета выполнен с возможностью генерировать область полета для географической области в виде полосы в соответствии с общим направлением целевого шаблона наблюдения.
В варианте осуществления настоящего изобретения компонент 402 определения целевого шаблона наблюдения включает в себя подкомпонент соединения точек выборки.
Подкомпонент соединения точек выборки выполнен с возможностью соединять множество точек выборки в порядке выборки для получения целевого шаблона наблюдения.
В варианте осуществления настоящего изобретения компонент 403 генерации области полета включает в себя подкомпонент генерации линии тренда и подкомпонент генерации ориентира.
Подкомпонент генерации линии тренда выполнен с возможностью генерировать линию тренда вдоль общего направления целевого шаблона наблюдения.
подкомпонент генерации ориентира выполнен с возможностью генерировать область полета для географической области в виде полосы, принимая в качестве ориентира позиционирования линию тренда.
В варианте осуществления настоящего изобретения подкомпонент генерации линии тренда, включает в себя блок определения опорной точки и блок генерации опорной точки.
Блок определения опорной точки выполнен с возможностью определять опорную точку в целевом шаблоне наблюдения.
Блок генерации опорной точки выполнен с возможностью генерировать линию тренда, проходящую через опорную точку, вдоль общего направления целевого шаблона наблюдения.
В варианте осуществления настоящего изобретения опорная точка представляет собой среднюю точку, а блок определения опорной точки включает в себя подблок запроса координат и подблок вычисления среднего значения.
Подблок запроса координат выполнен с возможностью запрашивать координаты множества точек выборки.
Подблок вычисления среднего значения выполнен с возможностью вычислять среднее значение координат множества точек выборки в качестве координат средней точки.
В варианте осуществления настоящего изобретения блок генерации опорной точки включает в себя подблок задания экстремальных точек, подблок соединения экстремальных точек и подблок генерации параллельной линии.
Подблок задания экстремальных точек выполнен с возможностью присваивать экстремальные координаты целевого шаблона наблюдения экстремальным точкам.
Подблок соединения экстремальных точек выполнен с возможностью соединять экстремальные точки для получения сегмента опорной линии.
Подблок генерации параллельной линии выполнен с возможностью генерировать линию тренда, параллельную сегменту опорной линии, через опорную точку.
В варианте осуществления настоящего изобретения область полета включает в себя одну или несколько подобластей, а подкомпонент генерации ориентира включает в себя блок вычисления ширины пилотирования, блок вычисления длины пилотирования и блок генерации подобласти.
Блок вычисления ширины пилотирования выполнен с возможностью вычислять ширину пилотирования, охватывающую целевой шаблон наблюдения.
Блок вычисления длины пилотирования выполнен с возможностью вычислять длину пилотирования беспилотного летательного аппарата, летящего в пределах ширины пилотирования.
Блок генерации подобласти пилотирования выполнен с возможностью брать длину пилотирования и последовательно расширять ширину пилотирования на линии тренда для формирования подобласти пилотирования одной полетной операции.
В варианте осуществления настоящего изобретения блок вычисления ширины пилотирования включает в себя подблок вычисления вертикального расстояния и подблок установки ширины пилотирования.
Подблок вычисления вертикального расстояния выполнен с возможностью вычислять вертикальное расстояние от каждой точки в целевого шаблона наблюдения до линии тренда.
Подблок установки ширины пилотирования выполнен с возможностью устанавливать в качестве ширины пилотирования удвоенную сумму максимального вертикального расстояния и заданного буферного расстояния.
В варианте осуществления настоящего изобретения блок генерации подобласти включает в себя подблок задания центральной линии, подблок определения рабочей начальной точки, подблок определения рабочей конечной точки и подблок вертикального расширения.
Подблок задания центральной линии выполнен с возможностью задавать линию тренда в качестве центральной линии подобласти.
Подблок определения рабочей начальной точки выполнен с возможностью последовательно определять рабочую начальную точку на линии тренда.
Подблок определения рабочей конечной точки выполнен с возможностью брать длину пилотирования от рабочей начальной точки и последовательно определять рабочую конечную точку для получения сегмента центральной линии.
Подблок вертикального расширения выполнен с возможностью последовательно соответственно расширять половину ширины пилотирования в вертикальном направлении сегмента центральной линии, чтобы получить рабочую подобласть одной полетной операции.
Так как вариант осуществления устройства, по сути, аналогичен варианту осуществления способа, то его описание сравнительно простое, и соответствующие части могут быть отнесены к описанию варианта осуществления способа.
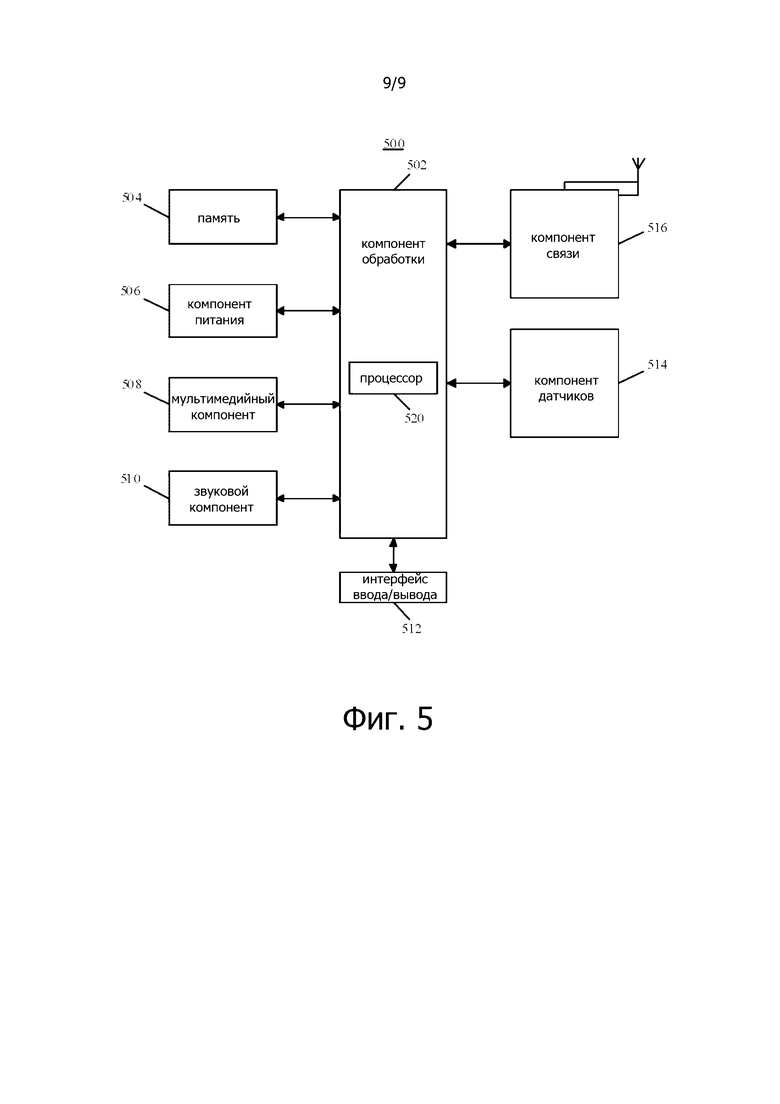
На фиг. 5 показана блок-схема пульта 500 дистанционного управления в соответствии с примером осуществления.
Со ссылкой на фиг. 5, пульт 500 дистанционного управления может включать в себя следующие компоненты: обрабатывающий компонент 502, память 504, компонент 506 питания, мультимедийный компонент 508, звуковой компонент 510, интерфейс 512 ввода/вывода (I/O), компонент 514 датчиков и компонент 516 связи.
Обрабатывающий компонент 502 обычно управляет всей работой пульта 500 дистанционного управления, например, операциями, связанными с отображением, телефонными звонками, передачей данных, работой камеры и операций записи. Обрабатывающий компонент 502 может включать в себя один или несколько процессоров 520, предназначенных для исполнения команд для выполнения всех или части этапов описанных выше способов. Более того, обрабатывающий компонент 502 может включать в себя один или несколько компонентов, которые упрощают взаимодействие между обрабатывающим компонентом 502 и другими компонентами. Например, обрабатывающий компонент 502 может включать в себя мультимедийный компонент, который упрощает взаимодействие между мультимедийным компонентом 508 и обрабатывающим компонентом 502.
Память 504 выполнена с возможностью хранить различные типы данных, чтобы поддерживать работу пульта 500 дистанционного управления. Примеры таких данных включают в себя команды для любых приложений или способов, работающих на пульте 500 дистанционного управления, данные контактов, данные телефонной книги, сообщения, изображения, видео и т.д. Память 504 может быть реализована с использованием любого типа энергозависимых или энергонезависимых запоминающих устройств или их сочетания, таких как статическая память с произвольным доступом (SRAM), электрически стираемое программируемое постоянное запоминающее устройство (EEPROM), стираемое программируемое постоянное запоминающее устройство (EPROM), программируемое постоянное запоминающее устройство (PROM), постоянное запоминающее устройство (ROM), магнитная память, флэш-память, магнитный или оптический диск.
Компонент 506 питания подает энергию к различным компонентам пульта 500 дистанционного управления. Компонент 506 питания может включать в себя микросхему управления электропитанием, одну или несколько батарей и любые другие компоненты, связанные с генерацией, управлением и распределением электропитания в пульте 500 дистанционного управления.
Мультимедийный компонент 508 включает в себя экран, обеспечивающий интерфейс вывода между пультом 500 дистанционного управления и пользователем. В некоторых вариантах осуществления экран может представлять собой жидкокристаллический дисплей (LCD) и сенсорную панель (TP). Если экран включает в себя сенсорную панель, то экран может быть реализован в виде сенсорного экрана, чтобы принимать входные сигналы от пользователя. Сенсорная панель включает в себя один или несколько тактильных датчиков для считывания касаний, пролистываний и жестов на сенсорной панели. Тактильные датчики могут не только считывать границу касания или пролистывания, но также могут считывать период времени и давление, связанные с касанием или пролистыванием. В некоторых вариантах осуществления мультимедийный компонент 508 включает в себя фронтальную камеру и/или заднюю камеру. Фронтальная камера и задняя камера могут принимать внешние мультимедийные данные, когда пульт 500 дистанционного управления находится в таком режиме работы, как режим фотографирования или режим видеосъемки. И фронтальная, и задняя камера могут представлять собой систему с фиксированным фокусным расстоянием либо может иметь функцию оптического зуммирования.
Звуковой компонент 510 выполнен с возможностью выводить и/или вводить звуковые сигналы. Например, звуковой компонент 510 включает в себя микрофон ("MIC"), выполненный с возможностью принимать внешний звуковой сигнал, когда пульт 500 дистанционного находится в рабочем режиме, например, в режиме звонка, режиме записи и режиме распознавания голоса. Принятый звуковой сигнал может также сохраняться в памяти 504 или передаваться с помощью компонента 516 связи. В некоторых вариантах осуществления звуковой компонент 510 дополнительно включает в себя громкоговоритель, предназначенный для вывода звуковых сигналов.
Интерфейс 512 ввода-вывода обеспечивает интерфейс, такой как OTG, между обрабатывающим компонентом 502 и периферийными интерфейсными компонентами, таким как клавиатура, колесо, кнопки и т.д. Кнопки могут включать в себя, но не ограничены этим, кнопку возврата на главный экран, кнопку регулировки громкости, кнопку включения и кнопку блокировки.
Компонент 514 датчиков включает в себя один или несколько датчиков, выполненных с возможностью оценивать состояние различных аспектов пульта 500 дистанционного управления. Например, компонент 514 датчиков может определять открытое/закрытое состояние пульта 500 дистанционного управления, относительное позиционирование компонентов, напр., дисплея и клавиатуры, пульта 500 дистанционного управления, изменение положения пульта 500 дистанционного управления или компонента пульта 500 дистанционного управления, наличие или отсутствие контакта пользователя с пультом 500 дистанционного управления, ориентацию или ускорение/замедление пульта 500 дистанционного управления и изменение температуры пульта 500 дистанционного управления. Компонент 514 датчиков может включать в себя датчик близости, выполненный с возможностью определять наличие рядом объектов без какого-либо физического контакта. Компонент 514 датчиков также может включать в себя датчик света, такой как датчик изображения типа CMOS или COT, для использования в приложениях работы с изображением. В некоторых вариантах осуществления компонент 514 датчиков также включает в себя компонент позиционирования, акселерометр, гироскоп, магнитный датчик, датчик давления или датчик температуры.
Компонент 516 связи выполнен с возможностью упрощать осуществление проводной или беспроводной связи между пультом 500 дистанционного управления и другими устройствами (такими как беспилотный летательный аппарат). Пульт 500 дистанционного управления может подключаться к беспроводной сети, основанной на некотором стандарте связи, таком как Wi-Fi, 2G, 3G или их сочетание. В одном примере осуществления компонент 516 связи принимает широковещательный сигнал или информацию, связанную с вещанием, от внешней системы управления вещанием через вещательный канал. В одном примере осуществления компонент 516 связи также включает в себя компонент ближней бесконтактной связи (NFC) для упрощения связи на коротких расстояниях. Например, NFC-компонент может быть реализован на основе технологии радиочастотной идентификации (RFID), технологии инфракрасной передачи (IrDA), технологии сверхширокополосной связи (UWB), технологии Bluetooth (BT), и других технологий.
В примерах осуществления пульт 500 дистанционного управления может быть реализован посредством одной или нескольких специализированных интегральных микросхем (ASIC), цифровых сигнальных процессоров (DSP), устройств цифровой обработки сигналов (DSPD), программируемых логических устройств (PLD), программируемых логических матриц (FPGA), контроллеров, микроконтроллеров, микропроцессоров или других электронных компонентов, выполненных с возможностью выполнять вышеуказанные способы.
В примерах осуществления также предусмотрен постоянный машинный носитель информации, включающий в себя команды, такие как команды, содержащиеся в памяти 504, выполняемые процессором 520 в пульте 500 дистанционного управления для выполнения вышеописанных способов. Например, постоянный машинный носитель информации может представлять собой ROM, RAM, CD-ROM, магнитную ленту, флоппи-диск, оптическое устройство хранения данных и т.п.
В варианте осуществления настоящего изобретения предложен носитель информации. Носитель информации включает в себя сохраненную на нем программу, при этом, если команды на носителе информации выполняют процессором мобильного терминала, при этом программу выполняют для управления устройством, причем носитель информации расположен так, чтобы выполнять способ планирования области полета беспилотного летательного аппарата. Способ включает в себя следующее:
получают множество точек выборки, кривых, прямых линий или блоков географической области в виде полосы;
определяют целевой шаблон наблюдения в соответствии с множеством точек выборки, кривых, прямых линий или блоков; и
генерируют область полета для географической области в виде полосы в соответствии с общим направлением целевого шаблона наблюдения.
Как вариант, этап, на котором определяют целевой шаблон наблюдения в соответствии с множеством точек выборки, кривых, прямых линий или блоков, включает в себя следующее:
множество точек выборки соединяют в порядке выборки, чтобы получить целевой шаблон наблюдения.
Как вариант, этап, на котором генерируют область полета для географической области в виде полосы в соответствии с общим направлением целевого шаблона наблюдения, включает в себя следующее:
вдоль общего направления целевого шаблона наблюдения генерируют линию тренда; и
генерируют область полета для географической области в виде полосы, принимая в качестве ориентира позиционирования линию тренда.
Как вариант, этап, на котором генерируют линию тренда вдоль общего направления целевого шаблона наблюдения, включает в себя следующее:
в целевом шаблоне наблюдения определяют опорную точку; и
вдоль общего направления целевого шаблона наблюдения генерируют линию тренда, проходящую через опорную точку.
Как вариант, исходная точка может включать в себя среднюю точку, а этап, на котором определяют опорную точку в целевом шаблоне наблюдения, включает в себя следующее:
запрашивают координаты множества точек выборки; и
в качестве координат средней точки вычисляют среднее значение координат множества точек выборки.
Как вариант, этап, на котором вдоль общего направления целевого шаблона наблюдения генерируют линию тренда, проходящую через опорную точку, включает в себя следующее:
экстремальным точкам присваивают экстремальные координаты целевого шаблона наблюдения;
соединяют экстремальные точки для получения сегмента опорной линии; и
через опорную точку генерируют линию тренда, параллельную сегменту опорной линии.
Как вариант, область полета включает в себя одну или несколько подобластей, а этап, на котором генерируют область полета для географической области в виде полосы, принимая в качестве ориентира позиционирования линию тренда, включает в себя следующее:
вычисляют ширину пилотирования, охватывающую целевой шаблон наблюдения;
вычисляют длину пилотирования беспилотного летательного аппарата, летящего в пределах шириной пилотирования; и
берут длину пилотирования, а ширину пилотирования последовательно расширяют на линии тренда для формирования подобласти одной полетной операции.
Как вариант, этап, на котором вычисляют ширину пилотирования, охватывающую целевой шаблон наблюдения, включает в себя следующее:
вычисляют вертикальное расстояние от каждой точки в целевом шаблоне наблюдения до линии тренда; и
в качестве ширины пилотирования устанавливают удвоенную сумму максимального вертикального расстояния и заданного буферного расстояния.
Как вариант, этап, на котором берут длину пилотирования, а ширину пилотирования последовательно расширяют на линии тренда для формирования подобласти одной полетной операции, включает в себя следующее:
задают линию тренда в качестве центральной линии рабочей подобласти;
на линии тренда последовательно определяют рабочую начальную точку;
длину пилотирования берут от рабочей начальной точки, и последовательно определяют рабочую конечную точку, чтобы получить сегмент центральной линии; и
половину ширины пилотирования соответственно последовательно расширяют в вертикальном направлении сегмента центральной линии, чтобы получить рабочую подобласть одной полетной операции.
В варианте осуществления настоящего изобретения предложен процессор. Процессор выполнен с возможностью запускать программу, причем программу запускают для того, чтобы выполнить способ планирования области полета беспилотного летательного аппарата. Способ включает в себя следующее:
получают множество точек выборки, кривых, прямых линий или блоков географической области в виде полосы;
определяют целевой шаблон наблюдения в соответствии с множеством точек отсчета, кривых, прямых линий или блоков; и
генерируют область полета для географической области в виде полосы в соответствии с общим направлением целевого шаблона наблюдения.
Как вариант, этап, на котором определяют целевой шаблон наблюдения в соответствии с множеством точек выборки, кривых, прямых линий или блоков, включает в себя следующее:
множество точек выборки соединяют в порядке выборки, чтобы получить целевой шаблон наблюдения.
Как вариант, этап, на котором генерируют область полета для географической области в виде полосы в соответствии с общим направлением целевого шаблона наблюдения, включает в себя следующее:
вдоль общего направления целевого шаблона наблюдения генерируют линию тренда; и
генерируют область полета для географической области в виде полосы, принимая в качестве ориентира позиционирования линию тренда.
Как вариант, этап, на котором генерируют линию тренда вдоль общего направления целевого шаблона наблюдения, включает в себя следующее:
в целевом шаблоне наблюдения определяют опорную точку; и
вдоль общего направления целевого шаблона наблюдения генерируют линию тренда, проходящую через опорную точку.
Как вариант, исходная точка может включать в себя среднюю точку, а этап, на котором определяют опорную точку в целевом шаблоне наблюдения, включает в себя следующее:
запрашивают координаты множества точек выборки; и
в качестве координат средней точки вычисляют среднее значение координат множества точек выборки.
Как вариант, этап, на котором вдоль общего направления целевого шаблона наблюдения генерируют линию тренда, проходящую через опорную точку, включает в себя следующее:
экстремальным точкам присваивают экстремальные координаты целевого шаблона наблюдения;
соединяют экстремальные точки для получения сегмента опорной линии; и
через опорную точку генерируют линию тренда, параллельную сегменту опорной линии.
Как вариант, область полета включает в себя одну или несколько подобластей, а этап, на котором генерируют область полета для географической области в виде полосы, принимая в качестве ориентира позиционирования линию тренда, включает в себя следующее:
вычисляют ширину пилотирования, охватывающую целевой шаблон наблюдения;
вычисляют длину пилотирования беспилотного летательного аппарата, летящего в пределах шириной пилотирования; и
берут длину пилотирования, а ширину пилотирования последовательно расширяют на линии тренда для формирования подобласти одной полетной операции.
Как вариант, этап, на котором вычисляют ширину пилотирования, охватывающую целевой шаблон наблюдения, включает в себя следующее:
вычисляют вертикальное расстояние от каждой точки в целевом шаблоне наблюдения до линии тренда; и
в качестве ширины пилотирования устанавливают удвоенную сумму максимального вертикального расстояния и заданного буферного расстояния.
Как вариант, этап, на котором берут длину пилотирования, а ширину пилотирования последовательно расширяют на линии тренда для формирования подобласти одной полетной операции, включает в себя следующее:
задают линию тренда в качестве центральной линии рабочей подобласти;
на линии тренда последовательно определяют рабочую начальную точку;
длину пилотирования берут от рабочей начальной точки, и последовательно определяют рабочую конечную точку, чтобы получить сегмент центральной линии; и
половину ширины пилотирования соответственно последовательно расширяют в вертикальном направлении сегмента центральной линии, чтобы получить рабочую подобласть одной полетной операции.
Различные варианты осуществления в настоящей спецификации описаны последовательно, каждый вариант осуществления сфокусирован на отличиях от других вариантов осуществления, а идентичные или похожие части между различными вариантами осуществления могут быть отнесены друг к другу.
Специалисту в области техники должно быть понятно, что варианты осуществления настоящего изобретения могут быть предоставлены в виде способа, устройства или компьютерного программного продукта. Таким образом, варианты осуществления настоящего изобретения могут принимать формы полностью аппаратных вариантов осуществления, полностью программных вариантов осуществления или вариантов осуществления, объединяющих программное и аппаратное обеспечение. Более того, варианты осуществления настоящего изобретения могут принимать формы компьютерного программного продукта, реализованного на одном или нескольких компьютерных носителях информации (включая, но не ограничиваясь, дисковую память, CD-ROM, оптическую память и т.п.), содержащих программные коды.
Варианты осуществления настоящего изобретения описаны со ссылкой на блок-схемы последовательности действий и блок-схемы способа, оконечного устройства (системы) и компьютерного программного продукта в соответствии с вариантами осуществления изобретения. Следует понимать, что каждая последовательность действий и/или блок на блок-схемах последовательности действий и/или блок-схемах и комбинация последовательностей действий и/или блоков на блок-схемах последовательности действий и/или блок-схемах может быть реализована с помощью компьютерных программных команд. Эти команды компьютерной программы могут быть предназначены для компьютера общего назначения, специализированного компьютера, встроенного процессора или процессоров других программируемых оконечных устройств обработки данных для генерации машины, так что устройство для достижения функций, обозначенных одной или несколькими последовательностями действий на блок-схемах последовательности действий и/или одним или несколькими блоками блок-схем получают посредством команд, выполняемых компьютерами или процессорами других программируемых оконечных устройств обработки данных.
Эти команды компьютерной программы также могут храниться в машиночитаемой памяти, способной управлять компьютерами или другими программируемыми оконечными устройствами обработки данных так, чтобы они работали в специфическом режиме, так что произведенный продукт, включающий в себя управляющее устройство, получают с помощью команд, хранящихся в машиночитаемой памяти, и управляющее устройство выполняет функции, обозначенные одной или несколькими последовательностями действий на блок-схемах последовательности действий и/или одним или несколькими блоками блок-схем.
Эти команды компьютерной программы также могут быть загружены на компьютеры или другие программируемые оконечные устройства обработки данных, так что обработку, реализованную компьютерами, выполняют путем выполнения последовательности этапов операций на компьютерах или других программируемых оконечных устройствах обработки данных, и поэтому, команды, исполняемые на компьютерах или других программируемых оконечных устройствах обработки данных обеспечивают этап выполнения функций, указанных в одной или нескольких последовательностях действий на блок-схемах последовательности действий и/или в одном или нескольких блоках блок-схем.
Хотя были описаны предпочтительные варианты осуществления настоящего изобретения, специалист в области техники, обладая основными творческими способностями, может внести дополнительные изменения и модификации в варианты осуществления. Поэтому прилагаемую формулу изобретения следует интерпретировать как включающую в себя предпочтительные варианты осуществления и все изменения и модификации, попадающие под объем вариантов осуществления настоящего изобретения.
Наконец, также следует отметить, что термины, обозначающие отношение, такие как первый и второй, используют только для того, чтобы отличать один объект или операцию от другого объекта или операции, и не обязательно требует или подразумевает наличия какой-либо такой фактической взаимосвязи или порядка между этими объектами или операциями. Более того, термины "включать в себя", "содержать" или любые другие их варианты предназначены для обозначения неисключительного включения, так что процесс, способ, изделие или оконечное устройство, включающее в себя ряд элементов, не только включает в себя эти элементы, то также включает в себя эти элементы, которые не были явно перечислены, или включает в себя элементы, внутренне присущие такому процессу, способу, изделию или оконечному устройству. При условии отсутствия иных ограничений не исключается, что в процессе, способе, изделии или оконечном устройстве, включающих в себя элементы, заданные предложением "включающий в себя...", имеются дополнительные идентичные элементы.
Выше приведено подробное описание способа планирования области полета беспилотного летательного аппарата, устройству планирования области полета беспилотного летательного аппарата, пульту дистанционного управления, процессору и носителю информации, предложенным в настоящем изобретении. Принцип и способ реализации настоящего изобретения описаны в этом документе в конкретных примерах. Описание вариантов осуществления приведено только для того, чтобы способствовать пониманию способа в соответствии с настоящим изобретением и его основных идей. Кроме того, специалистам в области техники в соответствии с идеей настоящего изобретения будут понятны изменения в конкретных способах реализации и объем изобретения. В заключение следует отметить, что приведенное выше описание не следует рассматривать как ограничивающее настоящее изобретение.
Предложены способ и устройство для планирования области полета беспилотного летательного аппарата и пульт дистанционного управления. Способ содержит этапы, на которых получают множество точек выборки или размеченную информацию географической области в виде полосы, представленной электронной картой, определяют целевой шаблон наблюдения в соответствии с множеством точек выборки или размеченной информацией географической области в виде полосы, представленной электронной картой, и генерируют область полета для географической области в виде полосы в соответствии с общим направлением целевого шаблона наблюдения. При этом на этапе генерирования области полета для географической области в виде полосы в соответствии с общим направлением целевого шаблона наблюдения генерируют линию тренда вдоль общего направления целевого шаблона наблюдения и генерируют область полета для географической области в виде полосы, принимая в качестве ориентира позиционирования линию тренда. Техническим результатом изобретения является повышение эффективности работы беспилотного летательного аппарата. 14 ил.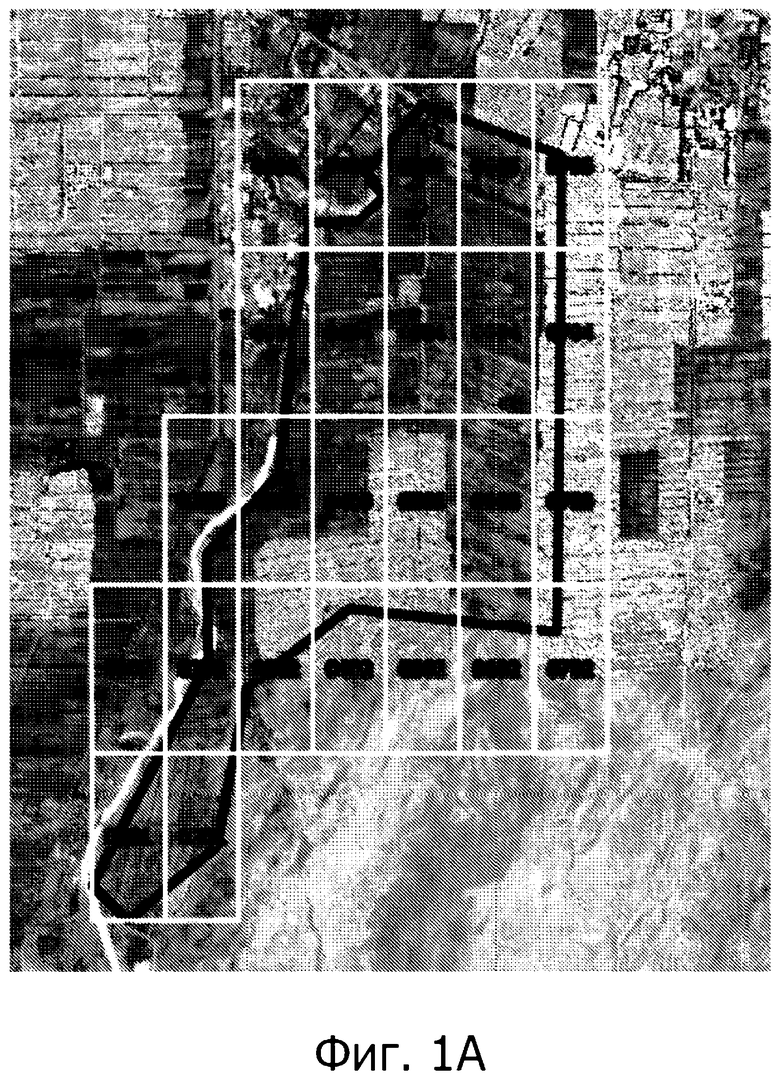
1. Способ планирования области полета беспилотного летательного аппарата, содержащий этапы, на которых:
получают множество точек выборки или размеченную информацию географической области в виде полосы, представленной электронной картой;
определяют целевой шаблон наблюдения в соответствии с множеством точек выборки или размеченной информацией географической области в виде полосы, представленной электронной картой; и
генерируют область полета для географической области в виде полосы в соответствии с общим направлением целевого шаблона наблюдения,
при этом на этапе генерирования области полета для географической области в виде полосы в соответствии с общим направлением целевого шаблона наблюдения:
генерируют линию тренда вдоль общего направления целевого шаблона наблюдения; и
генерируют область полета для географической области в виде полосы, принимая в качестве ориентира позиционирования линию тренда.
2. Способ по п. 1, в котором на этапе определения целевого шаблона наблюдения в соответствии с множеством точек или размеченной информацией географической области в виде полосы, представленной электронной картой:
соединяют множество точек выборки в порядке выборки для генерирования целевого шаблона наблюдения.
3. Способ по п. 1, в котором на этапе генерирования линии тренда вдоль общего направления целевого шаблона наблюдения:
определяют опорную точку на целевом шаблоне наблюдения; и
генерируют линию тренда, проходящую через опорную точку, вдоль общего направления целевого шаблона наблюдения.
4. Способ по п. 3, в котором опорная точка содержит среднюю точку, при этом на этапе определения опорной точки на целевом шаблоне наблюдения:
запрашивают координаты множества точек выборки; и
вычисляют среднее значение координат множества точек выборки в качестве координат средней точки.
5. Способ по п. 3, в котором на этапе генерирования линии тренда, проходящей через опорную точку, вдоль общего направления целевого шаблона наблюдения:
присваивают экстремальным точкам экстремальные координаты целевого шаблона наблюдения;
соединяют экстремальные точки для получения сегмента опорной линии; и
генерируют через опорную точку линию тренда, параллельную сегменту опорной линии.
6. Способ по п. 1, в котором область полета содержит одну или более подобластей полета, при этом на этапе генерирования области полета для географической области в виде полосы, принимая в качестве ориентира позиционирования линию тренда:
вычисляют ширину пилотирования, охватывающую целевой шаблон наблюдения;
вычисляют длину пилотирования беспилотного летательного аппарата, летящего в пределах ширины пилотирования; и
берут длину пилотирования и последовательно расширяют ширину пилотирования на линии тренда для генерирования подобласти пилотирования одной полетной операции.
7. Способ по п. 6, в котором на этапе вычисления ширины пилотирования, охватывающей целевой шаблон наблюдения:
вычисляют вертикальное расстояние от каждой точки на целевом шаблоне наблюдения до линии тренда; и
устанавливают в качестве ширины пилотирования удвоенную сумму максимального вертикального расстояния и заданного буферного расстояния.
8. Способ по п. 6, в котором на этапе взятия длины пилотирования и последовательного расширения ширины пилотирования на линии тренда для генерирования подобласти пилотирования одной полетной операции:
задают линию тренда в качестве центральной линии подобласти пилотирования;
последовательно определяют начальные точки пилотирования на линии тренда;
задают длину пилотирования от начальной точки пилотирования для последовательного определения конечной точки пилотирования для получения подсегмента центральной линии; и
последовательно расширяют половину ширины пилотирования соответственно в вертикальном направлении от подсегмента центральной линии для получения подобласти пилотирования одной полетной операции.
9. Устройство планирования области полета беспилотного летательного аппарата, содержащее:
компонент получения, выполненный с возможностью получать множество точек выборки или размеченную информацию географической области в виде полосы, представленной электронной картой;
компонент определения целевого шаблона наблюдения, выполненный с возможностью определять целевой шаблон наблюдения в соответствии с множеством точек выборки или размеченной информацией географической области в виде полосы, представленной электронной картой; и
компонент генерирования области полета, выполненный с возможностью генерировать область полета для географической области в виде полосы в соответствии с общим направлением целевого шаблона наблюдения,
при этом компонент генерирования области полета содержит:
подкомпонент генерирования линии тренда, выполненный с возможностью генерировать линию тренда вдоль общего направления целевого шаблона наблюдения; и
подкомпонент генерирования ориентира, выполненный с возможностью генерировать область полета для географической области в виде полосы, принимая в качестве ориентира позиционирования линию тренда.
10. Устройство по п. 9, в котором компонент определения целевого шаблона наблюдения содержит:
подкомпонент соединения точек выборки, выполненный с возможностью соединять множество точек выборки в порядке выборки для получения целевого шаблона наблюдения.
11. Устройство по п. 9 или 10, в котором подкомпонент генерирования линии тренда содержит:
блок определения опорной точки, выполненный с возможностью определять опорную точку на целевом шаблоне наблюдения; и
блок генерирования опорной точки, выполненный с возможностью генерировать линию тренда, проходящую через опорную точку, вдоль общего направления целевого шаблона наблюдения.
12. Устройство по п. 11, в котором опорная точка содержит среднюю точку, при этом блок определения опорной точки содержит:
подблок запроса координат, выполненный с возможностью запрашивать координаты множества точек выборки; и
подблок вычисления среднего значения, выполненный с возможностью вычислять среднее значение координат множества точек выборки в качестве координат средней точки.
13. Устройство по п. 11, в котором блок генерирования опорной точки содержит:
подблок задания экстремальных точек, выполненный с возможностью присваивать экстремальные координаты целевого шаблона наблюдения экстремальным точкам;
подблок соединения экстремальных точек, выполненный с возможностью соединять экстремальные точки для получения сегмента опорной линии; и
подблок генерирования параллельной линии, выполненный с возможностью генерировать через опорную точку линию тренда, параллельную сегменту опорной линии.
| Токарный резец | 1924 |
|
SU2016A1 |
| US 9613538 B1, 04.04.2017 | |||
| Токарный резец | 1924 |
|
SU2016A1 |
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ПОЛЕТОМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И БЕСПИЛОТНАЯ АВИАЦИОННАЯ СИСТЕМА | 2012 |
|
RU2523613C2 |
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ПОЛЕТОМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И БЕСПИЛОТНАЯ АВИАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2475802C1 |

