УРОВЕНЬ ТЕХНИКИ
Самолет с подвижным горизонтальным стабилизатором использует подходящую ориентацию (например, угол отклонения) стабилизатора для обеспечения взлета. Кроме того, эта ориентация известна как настройка стабилизатора для балансировки при взлете и соответствует общему моменту тангажа хвоста. Эти характеристики могут содержать завершение набора высоты без перебалансировки и/или без наличия конкретной реакции на скорость изменения тангажа на поворот при взлете для заданных сигналов управления от пилота. Настройка стабилизатора для балансировки при взлете может зависеть от различных параметров, таких как вес самолета, центр тяжести (CG), настройка тяги при взлете, угол отклонения закрылков при взлете и т.п. Перед взлетом настройка стабилизатора для балансировки при взлете может быть определена на основании информации из накладной самолета на груз, а также выбранного пилотом угла отклонения закрылков и настройки тяги при взлете. Большая часть полного диапазона перемещения стабилизатора может быть использована для вмещения возможных состояний при взлете, в частности для самолетов с большими диапазонами возможных нагрузок при взлете, углов отклонения закрылков и настроек тяги.
Были разработаны новые способы и системы, которые используют меньшие участки полного диапазона перемещения стабилизатора.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Предложены системы балансировки самолета и способы управления такими системами. По сравнению с другими системами балансировки эти системы используют небольшие участки полного диапазона перемещения горизонтального стабилизатора для настроек балансировки при взлете. Описанная система балансировки содержит стабилизатор и руль высоты, при этом эти компоненты используют вместе для достижения общего момента тангажа хвоста при взлете. Руль высоты или по меньшей мере часть рабочего диапазона руля высоты являются доступными для управления полетом. В силу этого настройки балансировки при взлете содержат настройки ориентации стабилизатора и руля высоты. Добавление руля высоты для управления моментом тангажа хвоста при взлете позволяет уменьшить полное перемещение стабилизатора. Ориентация руля высоты может быть изменена намного быстрее по сравнению с изменением ориентации стабилизатора, что предоставляет пилоту больше возможностей для обеспечения управления.
В некоторых вариантах реализации способ управления системой балансировки самолета включает определение настроек балансировки при взлете на основании параметров взлета самолета. Настройки балансировки при взлете содержат настройку ориентации стабилизатора и настройку ориентации руля высоты. Параметры взлета самолета содержат по меньшей мере один параметр, выбранный из веса самолета, центра тяжести самолета, настройки положения закрылков при взлете или настройки тяги при взлете. В дальнейшем способ переходит к регулировке, с использованием механизма задания ориентации стабилизатора, ориентации стабилизатора самолета в соответствии с настройкой ориентации стабилизатора из настроек балансировки при взлете. Способ также включает регулирование, с использованием механизма ориентирования руля высоты, ориентации руля высоты самолета в соответствии с настройкой ориентации руля высоты из настроек балансировки при взлете.
Настройка ориентации руля высоты из настроек балансировки при взлете может отличаться от нейтральной ориентации руля высоты. В качестве альтернативы настройка ориентации стабилизатора может быть выбрана таким образом, что настройка ориентации руля высоты соответствует своей нейтральной ориентации.
Настройка ориентации стабилизатора и настройка ориентации руля высоты из настроек балансировки при взлете зависят друг от друга. Другими словами, настройка ориентации стабилизатора и настройка ориентации руля высоты из настроек балансировки при взлете зависят друг от друга. В частности, определение настроек балансировки при взлете может включать определение настройки ориентации стабилизатора на основании настройки ориентации руля высоты. В этих вариантах реализации определение настройки ориентации стабилизатора может включать:
(a) выбор первоначальной настройки ориентации руля высоты;
(b) определение первоначальной настройки ориентации стабилизатора на основании первоначальной настройки ориентации руля высоты;
(c) сравнение первоначальной настройки ориентации стабилизатора с рабочими состояниями и
(d) выбор первоначальной настройки ориентации руля высоты в качестве настройки ориентации руля высоты и первоначальной настройки ориентации стабилизатора в качестве настройки ориентации стабилизатора.
Первоначальная настройка ориентации руля высоты может являться предельным значением для взлета из поддиапазона руля высоты при взлете, при этом поддиапазон руля высоты при взлете является составляющей полного рабочего диапазона руля высоты. Полный рабочий диапазон руля высоты дополнительно содержит один или более допустимых пределов управления полетом, при этом поддиапазон руля высоты при взлете задан на основании пригодности для управления полетом рулем высоты. В качестве альтернативы первоначальная настройка ориентации руля высоты является нейтральной ориентацией руля высоты.
В некоторых вариантах реализации выбор первоначальной настройки ориентации руля высоты, определение первоначальной настройки ориентации стабилизатора и сравнение первоначальной настройки ориентации стабилизатора с рабочими состояниями повторяют до тех пор, пока первоначальная настройка ориентации стабилизатора не будет находится в пределах заданного порогового значения от среднего рабочих состояний. В качестве альтернативы эти операции могут быть повторены до тех пор, пока первоначальная настройка ориентации руля высоты не будет находится в пределах заданного порогового значения от нейтральной ориентации, а первоначальная настройка ориентации стабилизатора не будет находится в пределах рабочих состояний.
В некоторых вариантах реализации способ дополнительно включает уменьшение отклонения для управления рулем высоты в системе управления полетом. Для целей описания отклонение для управления рулем высоты задано в качестве состояния в случае, когда настройка ориентации руля высоты из настроек балансировки при взлете не соответствует нейтральной ориентации руля высоты. Настройка ориентации руля высоты из настроек балансировки при взлете может также называться настройкой ориентации руля высоты при взлете. Отклонение вызвано тем фактом, что эта настройка ориентации руля высоты при взлете является составляющей настроек балансировки при взлете и не является составляющей входных данных для управления полетом. В силу этого операцию осуществляют при условии, что настройка ориентации руля высоты отличается от нейтральной ориентации. В некоторых вариантах реализации система управления полетом может представлять собой электродистанционную систему управления.
В некоторых вариантах реализации определение настроек балансировки при взлете осуществляют с использованием базы данных. В некоторых вариантах реализации способ дополнительно включает инициирование взлета самолета, при этом ориентация стабилизатора соответствует настройке ориентации стабилизатора, а ориентация руля высоты соответствует настройке ориентации руля высоты. В этих вариантах реализации способ может дополнительно включать изменение ориентации стабилизатора после взлета до тех пор, пока нейтральная ориентация механизма ориентирования руля высоты не будет соответствовать нейтральной ориентации руля высоты. Другими словами, настройки балансировки могут быть изменены после взлета таким образом, что отклонение руля высоты, связанное со взлетом, будет уменьшено до заданного уровня или исключено.
В некоторых вариантах реализации по меньшей мере один из механизма ориентирования руля высоты и механизма задания ориентации стабилизатора выполнен с возможностью управления с использованием электронных средств. Электронное управление позволяет изменять ориентацию руля высоты для взлета с обеспечением отсутствия смещения или пониженного смещения, включаемого в управляющие воздействия пилота.
В некоторых вариантах реализации механизмом задания ориентации стабилизатора автоматически управляют посредством контроллера управления балансировкой, выдающим настройку ориентации стабилизатора и настройку ориентации руля высоты непосредственно в механизм задания ориентации стабилизатора.
В некоторых вариантах реализации система балансировки самолета содержит контроллер управления балансировкой, механизм задания ориентации стабилизатора, стабилизатор, механизм ориентирования руля высоты и руль высоты. Контроллер управления балансировкой выполнен с возможностью определения настроек балансировки для обеспечения взлета самолета на основании параметров взлета самолета. Например, настройки балансировки при взлете могут содержать настройку ориентации стабилизатора и настройку ориентации руля высоты. Параметры взлета самолета могут содержать по меньшей мере один параметр, выбранный из веса самолета, центра тяжести самолета, настройки положения закрылков самолета или настройки тяги при взлете самолета. Механизм задания ориентации стабилизатора выполнен с возможностью управления на основании настройки ориентации стабилизатора. Стабилизатор механически соединен с механизмом задания ориентации стабилизатора. Механизм задания ориентации стабилизатора выполнен с возможностью изменения ориентации стабилизатора на основании настройки ориентации стабилизатора. Механизм ориентирования руля высоты выполнен с возможностью управления на основании настройки ориентации руля высоты. Руль высоты механически соединен с механизмом ориентирования руля высоты. Кроме того, механизм ориентирования руля высоты выполнен с возможностью изменения ориентации руля высоты на основании настройки ориентации руля высоты.
В некоторых вариантах реализации контроллер управления балансировкой соединен с возможностью обмена данными по меньшей мере с одним из механизма задания ориентации стабилизатора и механизма ориентирования руля высоты. Контроллер управления балансировкой может быть выполнен с возможностью приема настройки ориентации руля высоты от контроллера управления полетом и с возможностью определения настройки ориентации стабилизатора на основании настройки ориентации руля высоты, принятой от контроллера управления полетом.
Один из вариантов реализации настоящего изобретения содержит способ управления системой балансировки самолета, включающий определение настроек балансировки при взлете на основании параметров взлета самолета, при этом настройки балансировки при взлете содержат настройку ориентации стабилизатора и настройку ориентации руля высоты, а параметры взлета самолета содержат по меньшей мере один параметр, выбранный из веса самолета, центра тяжести самолета, настройки положения закрылков при взлете или настройки тяги при взлете; регулирование, с использованием механизма самолета для задания ориентации стабилизатора, ориентации стабилизатора самолета в соответствии с настройкой ориентации стабилизатора из настроек балансировки при взлете; и регулирование, с использованием механизма самолета для ориентирования руля высоты, ориентации руля высоты самолета в соответствии с настройкой ориентации руля высоты из настроек балансировки при взлете. Настройка ориентации руля высоты из настроек балансировки при взлете может отличаться от нейтральной ориентации руля высоты. Настройка ориентации стабилизатора и настройка ориентации руля высоты из настроек балансировки при взлете могут зависеть друг от друга. Определение настроек балансировки при взлете может включать определение настройки ориентации стабилизатора на основании настройки ориентации руля высоты. Определение настройки ориентации стабилизатора на основании настройки ориентации руля высоты может включать выбор первоначальной настройки ориентации руля высоты; определение первоначальной настройки ориентации стабилизатора на основании первоначальной настройки ориентации руля высоты; сравнение первоначальной настройки ориентации стабилизатора с рабочими состояниями; и выбор первоначальной настройки ориентации руля высоты в качестве настройки ориентации руля высоты и первоначальной настройки ориентации стабилизатора в качестве настройки ориентации стабилизатора. Первоначальная настройка ориентации руля высоты может являться предельным значением для взлета из поддиапазона руля высоты при взлете, при этом поддиапазон руля высоты при взлете является составляющей полного рабочего диапазона руля высоты, полный рабочий диапазон руля высоты дополнительно содержит один или более допустимых пределов управления полетом, а поддиапазон руля высоты при взлете может быть задан на основании пространственных положений руля высоты для управления полетом. Первоначальная настройка ориентации руля высоты может являться нейтральной ориентацией руля высоты. Выбор первоначальной настройки ориентации руля высоты, определение первоначальной настройки ориентации стабилизатора и сравнение первоначальной настройки ориентации стабилизатора с рабочими состояниями могут быть повторены до тех пор, пока первоначальная настройка ориентации стабилизатора не будет находится в пределах заданного порогового значения от среднего рабочих состояний. Выбор первоначальной настройки ориентации руля высоты, определение первоначальной настройки ориентации стабилизатора и сравнение первоначальной настройки ориентации стабилизатора с рабочими состояниями могут быть повторены до тех пор, пока первоначальная настройка ориентации руля высоты не сможет находиться в пределах заданного порогового значения по отношению к нейтральной ориентации, а первоначальная настройка ориентации стабилизатора не сможет находиться в пределах рабочих состояний. Способ может также включать уменьшение отклонения при управлении рулем высоты в системе управления полетом при условии, что настройка ориентации руля высоты отличается от нейтральной ориентации. Система управления полетом может представлять собой электродистанционную систему управления. Определение настроек балансировки при взлете может быть осуществлено с использованием базы данных. Способ может также включать инициирование взлета самолета, при этом ориентация стабилизатора соответствует настройке ориентации стабилизатора, а ориентация руля высоты соответствии с настройкой ориентации руля высоты. Способ может также включать изменение ориентации стабилизатора после взлета до тех пор, пока нейтральная контрольная точка системы управления полетом не будет соответствовать нейтральной ориентации руля высоты. Способ может также включать прием параметров взлета самолета. По меньшей мере один из параметров взлета самолета может быть принят от датчика самолета. Датчик самолета может содержать датчик веса, установленный в шасси самолета.
Еще один вариант реализации настоящего изобретения содержит систему балансировки самолета, содержащую контроллер управления балансировкой, выполненный с возможностью определения настроек балансировки при взлете самолета на основании параметров взлета самолета, при этом настройки балансировки при взлете содержат настройку ориентации стабилизатора и настройку ориентации руля высоты, при этом параметры взлета самолета содержат по меньшей мере один параметр, выбранный из одного из веса самолета, центра тяжести самолета, настройки положения закрылков самолета или настройки тяги при взлете самолета; механизм задания ориентации стабилизатора, выполненный с возможностью управления на основании настройки ориентации стабилизатора; стабилизатор, механически соединенный с механизмом задания ориентации стабилизатора, причем механизм задания ориентации стабилизатора может быть выполнен с возможностью изменения ориентации стабилизатора на основании настройки ориентации стабилизатора; механизм ориентирования руля высоты, выполненный с возможностью управления на основании настройки ориентации руля высоты; и руль высоты, механически соединенный с механизмом ориентирования руля высоты, при этом механизм ориентирования руля высоты может быть выполнен с возможностью изменения ориентации руля высоты на основании настройки ориентации руля высоты. Контроллер управления балансировкой может быть соединен с возможностью обмена данными по меньшей мере с одним из механизма задания ориентации стабилизатора и механизма ориентирования руля высоты. Контроллер управления балансировкой может быть выполнен с возможностью приема настройки ориентации руля высоты от контроллера управления полетом и с возможностью определения настройки ориентации стабилизатора на основании настройки ориентации руля высоты, принятой от контроллера управления полетом.
Описанные признаки и функции могут быть могут быть обеспечены независимо друг от друга в различных примерах или могут быть объединены еще в одних примерах, подробные сведения о которых можно найти со ссылкой на приведенные далее подробное описание и чертежи.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
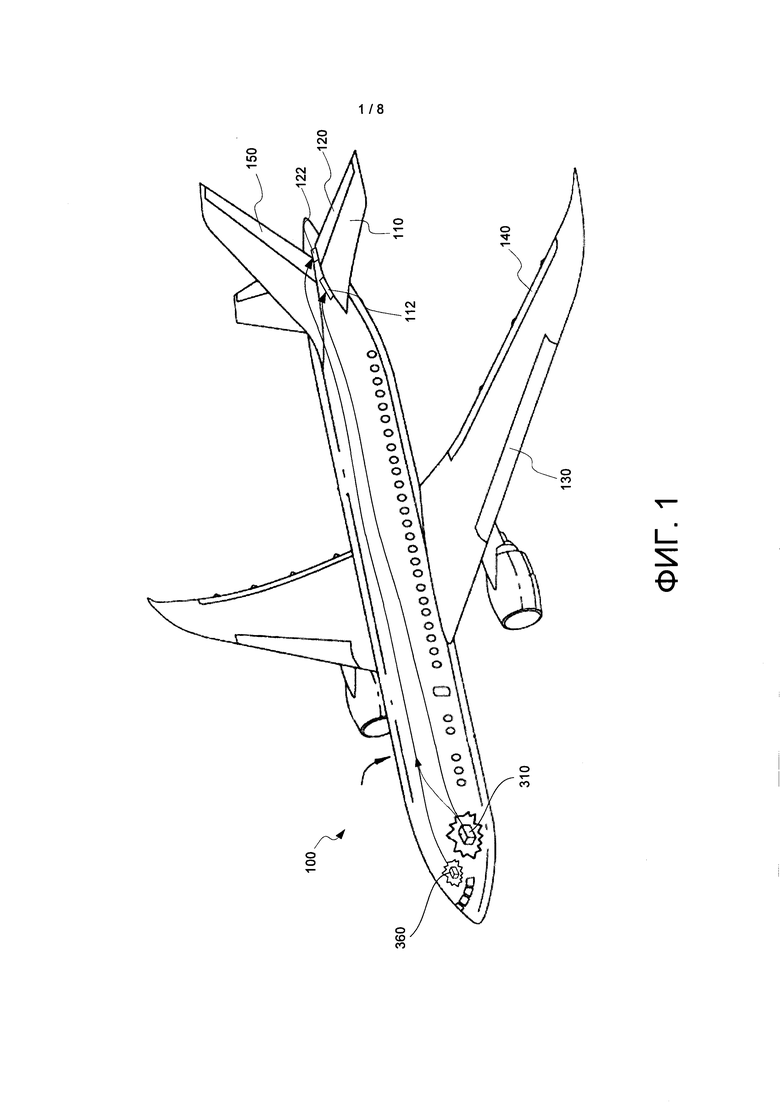
На ФИГ. 1 схематически показан самолет в соответствии с некоторыми вариантами реализации, содержащий стабилизатор и руль высоты.
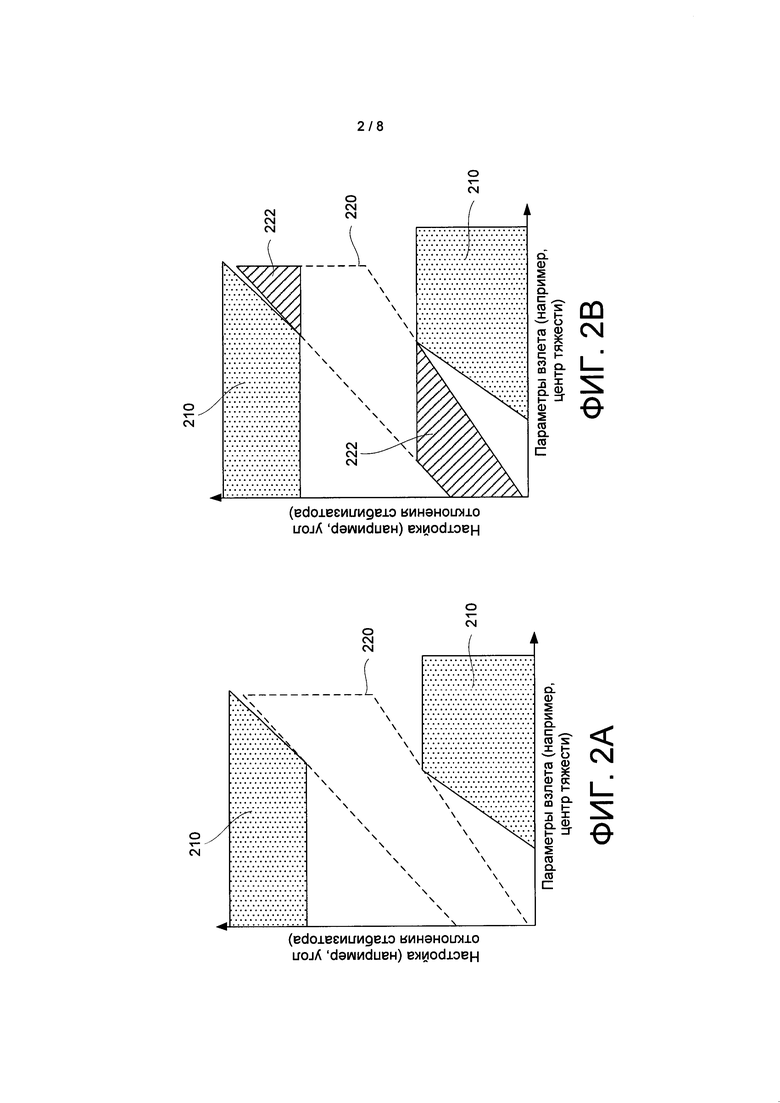
На ФИГ. 2А и 2В показаны графики рабочих и нерабочих состояний в соответствии с некоторыми вариантами реализации, соответствующих поддиапазонам, используемым для балансировки при взлете в случае, когда ориентацию стабилизатора используют исключительно в качестве настройки балансировки.
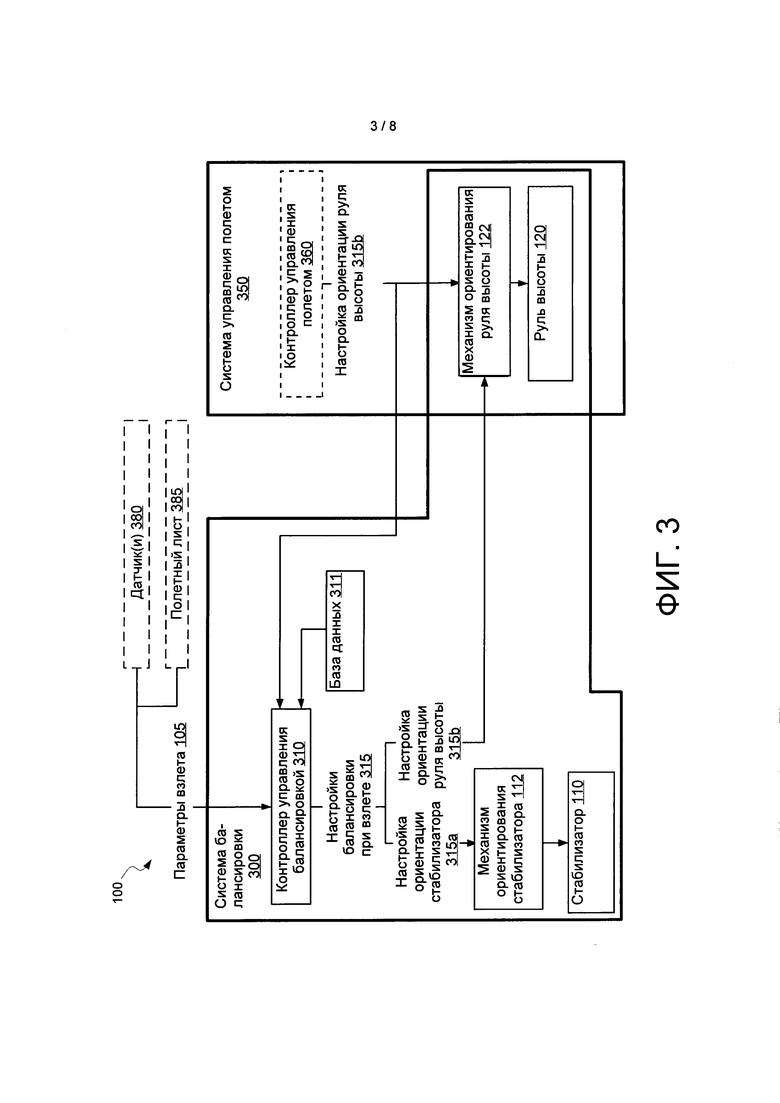
На ФИГ. 3 схематически показаны система балансировки и система управления полетом самолета в соответствии с некоторыми вариантами реализации, показанного на фиг. 1.
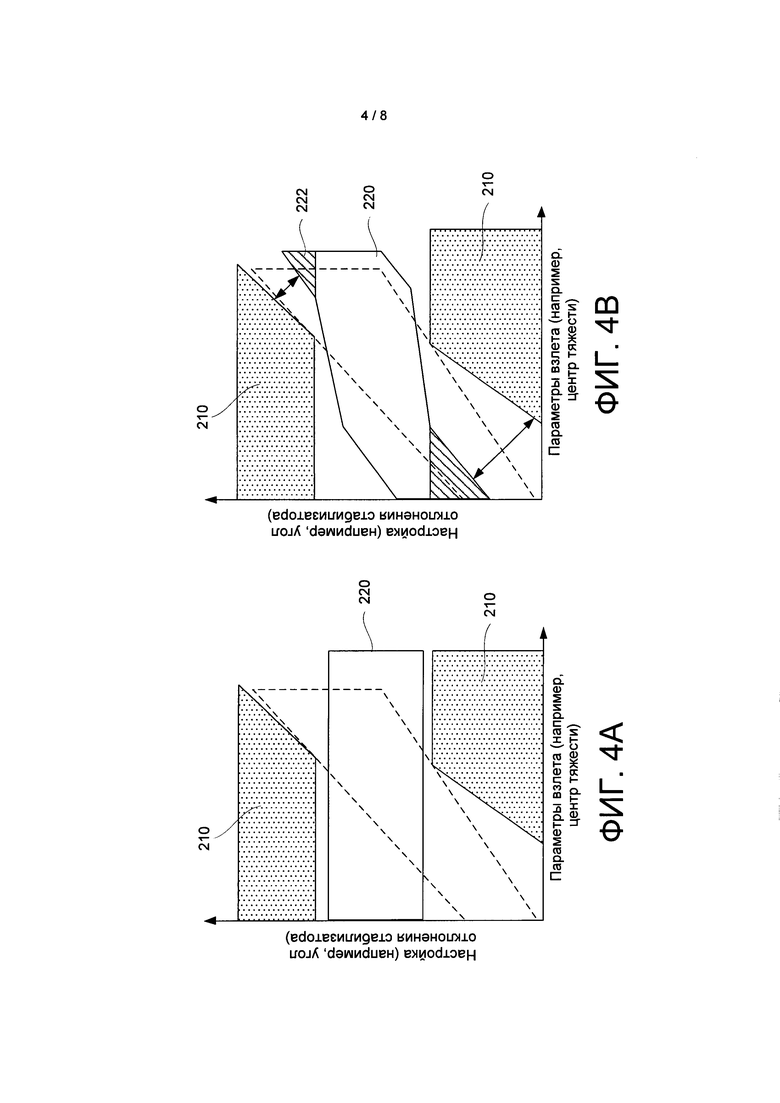
На ФИГ. 4А и 4В показаны графики рабочих и нерабочих состояний в соответствии с некоторыми вариантами реализации, соответствующих поддиапазонам, используемым для балансировки при взлете в случае, когда ориентации стабилизатора руля высоты использованы в качестве настроек балансировки.
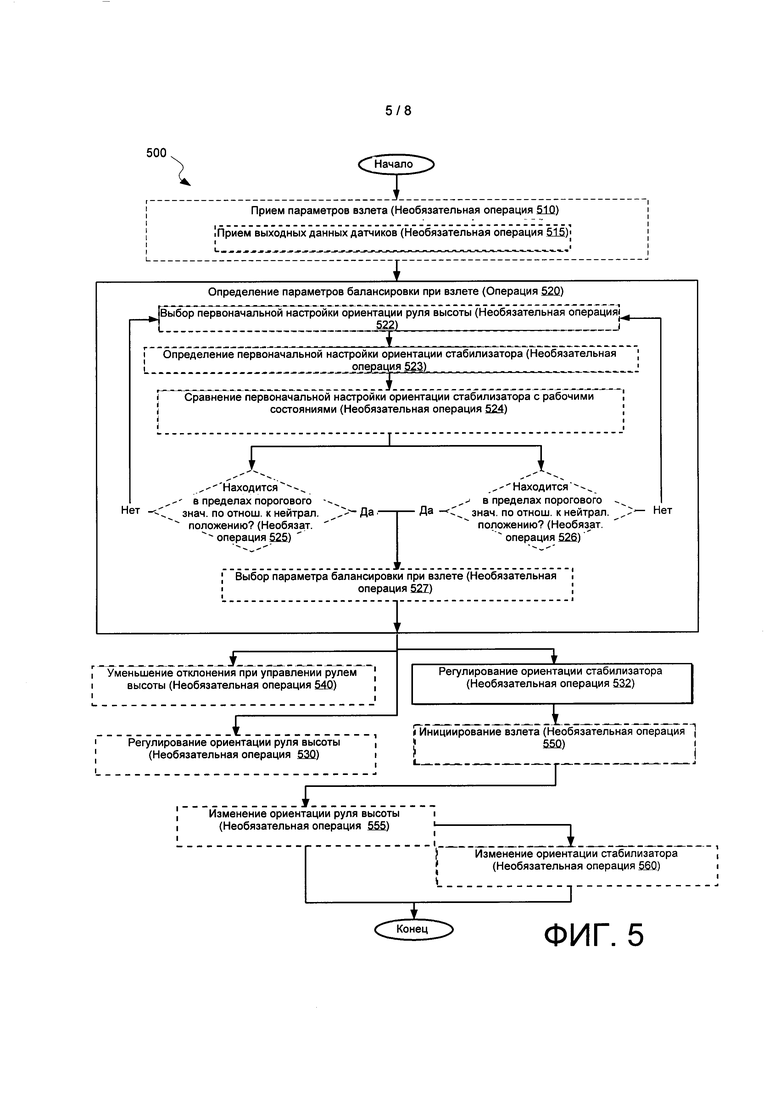
На ФИГ. 5 показана блок-схема способа управления системой балансировки самолета в соответствии с некоторыми вариантами реализации.
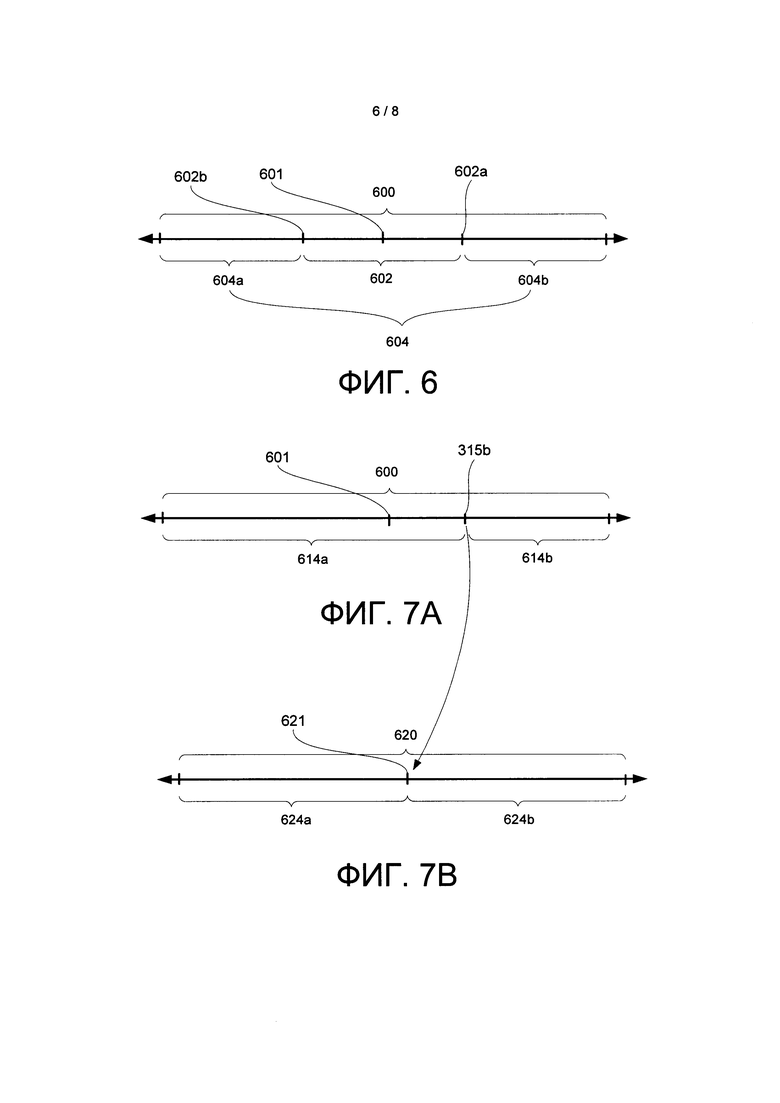
На ФИГ. 6 схематически показан пример рабочего диапазона руля высоты в соответствии с некоторыми вариантами реализации.
На ФИГ. 7А - 7В схематически показано соответствие между рабочими настройками руля высоты и настройками для управления рулем высоты в соответствии с некоторыми вариантами реализации.
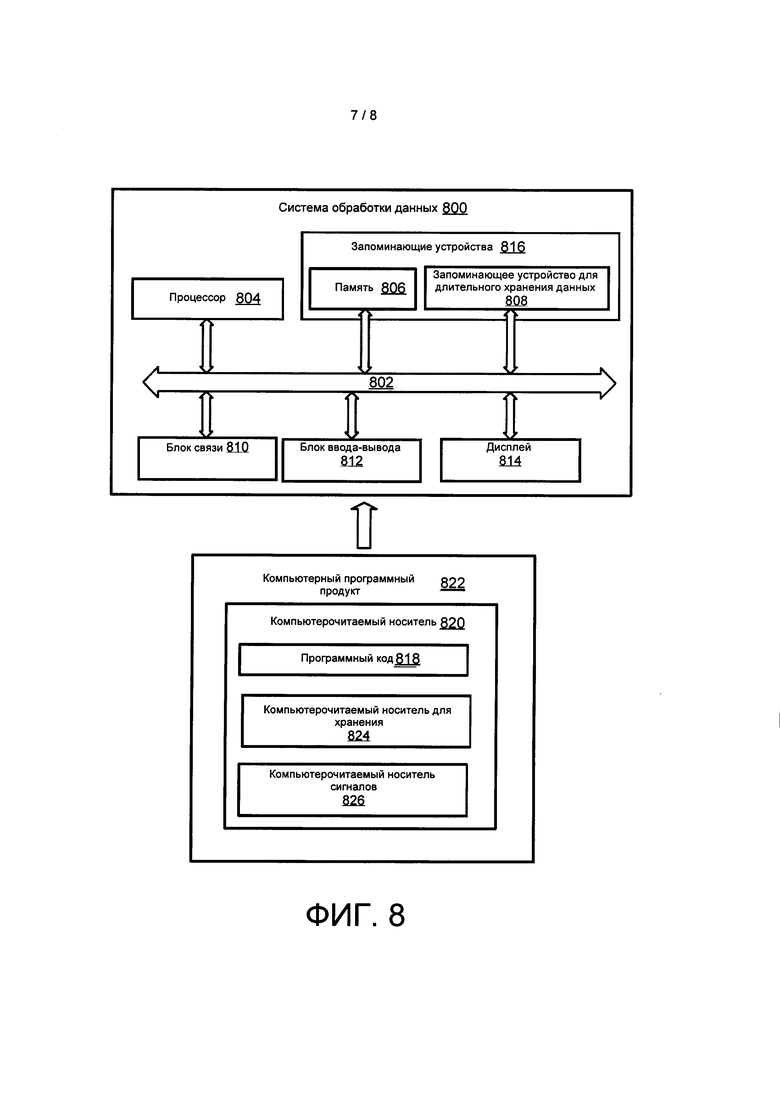
На ФИГ. 8 показана система обработки данных, выполненная в соответствии с некоторыми вариантами реализации.
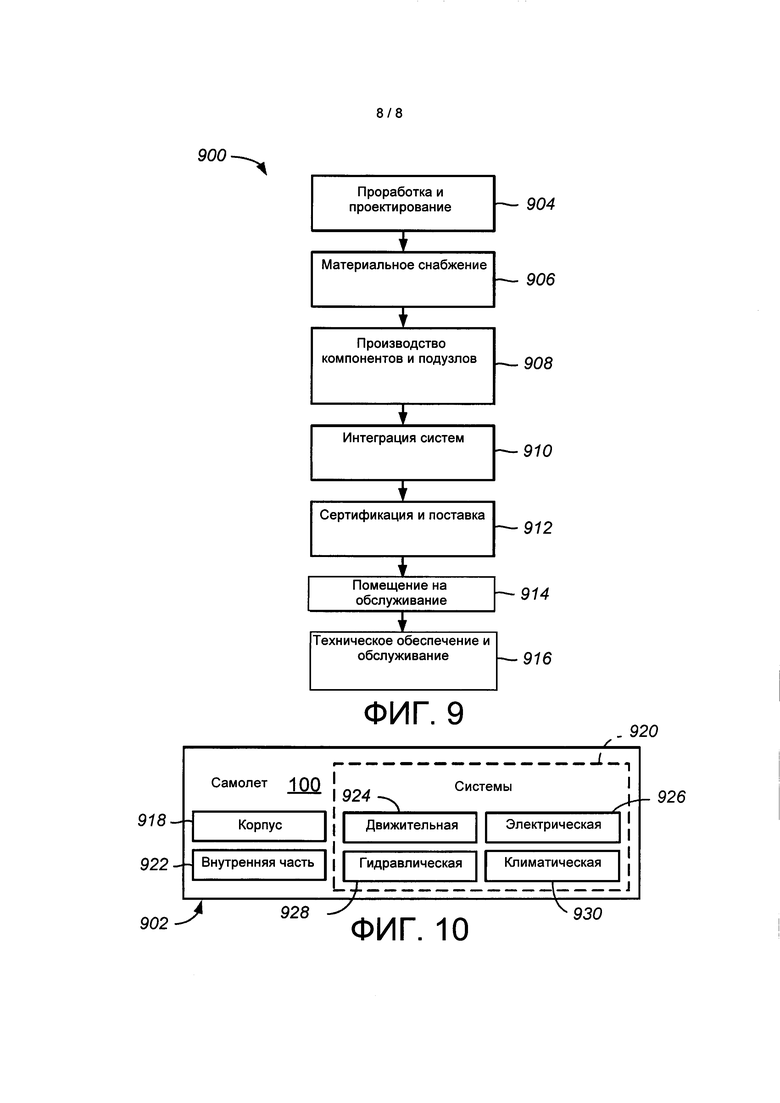
На ФИГ. 9 показана блок-схема примера способа изготовления и обслуживания самолетов в соответствии с некоторыми вариантами реализации.
На ФИГ. 10 показана структурная схема примера самолета в соответствии с некоторыми вариантами реализации.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
В представленном далее описании многие конкретные сведения приведены для обеспечения понимания представленных идей. Представленные идеи могут быть реализованы без некоторых из этих конкретных подробных сведений или без их всех. В других примерах известные операции процесса не были подробно описаны для упрощения понимания описанных идей. Несмотря на то, что некоторые идеи описаны в отношении конкретных примеров, будет понятно, что эти примеры не следует рассматривать в качестве ограничения.
Введение
Многие самолеты, в частности авиалайнеры, имеют хвостовые стабилизаторы с регулируемым углом атаки, которые также могут называться подвижными горизонтальными стабилизаторами. Конкретный угол отклонения стабилизатора, используемый для обеспечения взлета, может называться настройкой стабилизатора для балансировки при взлете или просто настройкой ориентации стабилизатора. Этот угол отклонения стабилизатора или, в частности, ориентация стабилизатора является составляющей настроек балансировки при взлете. Кроме того, угол отклонения стабилизатора может изменяться во время полета, например, по мере сжигания топлива и изменения центра тяжести самолета.
В отличие от других систем балансировки, в которых угол отклонения стабилизатора является основным фактором и часто единственным фактором, определяющим суммарный момент тангажа хвоста самолета, системы балансировки, описанные в данном документе, используют сочетание стабилизатора и руля высоты для создания подходящего момента тангажа. Другими словами, ориентация стабилизатора и ориентация руля высоты являются составляющими балансировки при взлете. В силу этого настройки балансировки при взлете, описанные в данном документе, содержат по меньшей мере настройку ориентации стабилизатора и настройку ориентации руля высоты. Благодаря дополнительному воздействию руля высоты во время взлета диапазон перемещения стабилизатора может быть существенно уменьшен по сравнению с другими системами.
Краткое описание самолета 100 со ссылкой на ФИГ. 1 может иллюстрировать некоторые признаки настоящего изобретения. В частности, самолет 100 содержит стабилизатор 110 и руль 120 высоты, которые представляют собой два компонента поверхностей для управления полетом. Иные компоненты поверхности для управления полетом могут содержать предкрылки 130, элероны 140 и руль 150 направления. Элероны 140, руль 120 высоты и руль 150 направления можно рассматривать в качестве основных компонентов для управления полетом. Изменение ориентации этих компонентов перенаправляет воздушные потоки вокруг этих компонентов и создает несбалансированные усилия, которые поворачивают самолет 100 вокруг одной или более соответствующих осей (например, боковой, продольной и/или вертикальной оси).
Элероны 140 могут быть установлены на задних кромках крыльев (например, элероны, установленные рядом с концевыми частями крыла, закрылки, установленные ближе к фюзеляжу). Элероны 140 совершают перемещения в противоположных направлениях и вызывают крен и разворот самолета 100. В частности, поднятый элерон уменьшает подъемное усилие на этом крыле, а опущенный элерон увеличивает подъемное усилие.
Руль 150 направления может быть установлен на хвостовой кромке вертикального стабилизатора и может быть использован для изменения рысканья самолета 100. Отклонение руля направления вправо толкает хвостовую часть влево, что в свою очередь приводит к тому, что нос рыскает вправо. Возврат руля направления в нейтральное положение приводит к остановке рысканья самолета 100.
Стабилизатор 110, который представляет собой меньшую несущую поверхность (по сравнению с крыльями), находящуюся на хвосте самолета 100, используют для обеспечения стабильности и управления. В частности, стабилизатор 110 способствует выполнению регулировок, соответствующих изменений центра давления или центра тяжести самолета 100, вызываемым, например, изменениями скорости и высоты, расхода топлива, сбросом груза или полезной нагрузки и т.п. Как дополнительно описано ниже, ориентация стабилизатора 110 может быть отрегулирована. Стабилизатор 110 также может быть использован и на летательных аппаратах иных типов, например на летательных аппаратах с нефиксированными крыльями, таком как вертолеты и автожиры.
Ориентация стабилизатора 110 управляется пилотом и/или контроллером 310 управления балансировкой с использованием механизма 112 задания ориентации стабилизатора.
Рули 120 высоты, которые могут быть присоединены с возможностью перемещения (например, шарнирно присоединены) к задней стороне стабилизатора 110, имеют размеры, намного меньшие размеров стабилизатора 110. Благодаря этой разности в размерах ориентация рулей 120 высоты может быть изменена намного быстрее по сравнению с изменением ориентации стабилизатора 110. Благодаря этой более высокой скорости регулирования ориентации рули 120 высоты могут обеспечивать более динамическое управление по сравнению со стабилизатором 110. Два руля 120 высоты, которые размещены на разных сторонах хвоста, вместе совершают перемещение по направлению вверх и вниз. Рули 120 высоты управляются пилотом, контроллером 360 управления полетом и/или контроллером 310 управления балансировкой с использованием механизма 122 ориентирования руля высоты. Рули 120 высоты других самолетов не управляются контроллером 310 управления балансировкой, поскольку рули 120 высоты не являются частями систем балансировки. Во время работы самолета поднятые рули 120 высоты толкают вниз хвостовую часть и вызывают задирание кверху носа самолета 100. Это, в свою очередь, приводит к тому, что полет проходит с большим углом атаки, что создает большую подъемную силу и большее лобовое сопротивление.
Учет прежде всего ориентации стабилизатора для балансировки при взлете вызывает различные проблемы. На ФИГ. 2А и 2В показаны графики рабочих состояний 220 и нерабочих состояний 210 в случае, когда ориентацию стабилизатора используют в качестве первоначальной настройки балансировки. В этом примере нерабочие состояния 210 и рабочие состояния 220 выявляют на основании различных комбинаций углов отклонения стабилизатора и параметров взлета. В пределах объема находятся параметры взлета различных типов, такие как вес самолета, центр тяжести самолета, настройка положения закрылков при взлете и настройки тяги при взлете. Кроме того, специалист в данной области техники сможет понять, что эти параметры взлета имеют различные комбинированные эффекты. Для наглядности в самом начале будет описан вес самолета. Для целей описания рабочие состояния 220 заданы как любое сочетание настроек ориентации стабилизатора (или, в частности, настроек балансировки при взлете) и параметров взлета, при которых самолет может безопасно работать, например может безопасно завершить взлет. Ориентация стабилизатора или, в частности, угол отклонения стабилизатора могут быть заданы в качестве отклонения стабилизатора от своего нейтрального положения. Нерабочие состояния 210, которые должны быть предотвращены, заданы как любое сочетание настроек ориентации стабилизатора (или, в частности, настроек балансировки при взлете) и параметров взлета. В силу этого предотвращают нерабочие состояния 210. Кроме того, некоторые рабочие состояния 220 могут быть ближе к нерабочим состояниям 210 и могут иметь больший риск непреднамеренного (или ошибочного) перехода в нерабочие состояния. Эти участки, обозначенные на ФИГ. 2В контурным рисунком, могут называться податливыми состояниями 222. Податливые состояния 222 также исключены, если это возможно, для уменьшения общего риска.
Например, больший угол отклонения стабилизатора используют для самолета большего веса для создания момента тангажа хвоста, что обеспечивает возможность поворота самолета во время взлета. Кроме того, для самолета заданного веса некоторый диапазон углов отклонения стабилизатора является в целом доступным. В силу этого рабочие состояния 220 представлены скошенным блоком на ФИГ. 2А и 2В. Если для самолета небольшого веса выбран большой угол отклонения стабилизатора, то в дальнейшем во время взлета может быть создан чрезмерный момент тангажа хвоста, который соответствует нерабочим состояниям 210, представленным верхним затемненным блоком на ФИГ. 2А и 2В. Это может вызвать неконтролируемое кабрирование самолета во время взлета. Аналогичным образом при выборе небольшого угла отклонения стабилизатора для самолета большего веса в дальнейшем созданный момент тангажа может быть недостаточно высоким для взлета, что ограничивает поворот самолета во время взлета и, соответственно, не обеспечивает возможность взлета, что соответствует нерабочим состояниям 210, представленным нижним затемненным блоком на ФИГ. 2А и 2В.
Примеры системы балансировки
На ФИГ. 3 схематически показаны система 300 балансировки и система 350 управления полетом самолета 100 в соответствии с некоторыми вариантами реализации. Система 300 балансировки может содержать контроллер 310 управления балансировкой, механизм 112 задания ориентации стабилизатора и стабилизатор 110. Кроме того, в отличие от других систем балансировки система 300 балансировки, представленная на ФИГ. 3, также содержит механизм 122 ориентирования руля высоты и руль 120 высоты. Другими словами, стабилизатор 110 и руль 120 высоты оба являются частями системы 300 балансировки. Следует отметить, что механизм 122 ориентирования руля высоты и руль 120 высоты также представляют собой части системы 350 управления полетом. В силу этого операции и функциональные возможности руля 120 высоты совместно используются системой 350 управления полетом и системой 300 балансировки, как дополнительно описано ниже.
На ФИГ. 4А показан пример рабочих состояний 220 и нерабочих состояний 210 в соответствии с некоторыми вариантами реализации в случае, когда ориентации стабилизатора и руля высоты используют в качестве настроек балансировки. В сравнении с графиками, показанными на ФИГ. 2В и ФИГ. 4А, можно заметить, что при использовании вместе ориентаций стабилизатора и руля высоты в качестве настроек балансировки податливые состояния 222 могут быть полностью устранены.
На ФИГ. 4В показан пример рабочих состояний 220 и нерабочих состояний 210 в соответствии с некоторыми вариантами реализации в случае, когда ориентации стабилизатора и руля высоты используют вместе в качестве настроек балансировки. В сравнении с графиками, показанными на ФИГ. 2В и ФИГ. 4В, очевидно, что рабочие состояния 220, показанные на ФИГ. 4В, дополнительно отделены от нерабочих состояний 210, а не от тех, которые показаны на ФИГ. 2В. В силу этого использование ориентаций стабилизатора и руля высоты в качестве настроек балансировки улучшило технические характеристики.
Контроллер 310 управления балансировкой выполнен с возможностью определения настроек 315 балансировки при взлете и дополнительно выполнен с возможностью регулирования этих настроек балансировки после взлета. Контроллер 310 управления балансировкой может представлять собой компьютерную систему, некоторые примеры которой описаны ниже. В некоторых вариантах реализации операции, связанные с определением настроек 315 балансировки при взлете, осуществляют автоматически, например с использованием базы данных 311, которая может быть соединена с контроллером 310 управления балансировкой или может представлять собой часть контроллера 310 управления балансировкой. Одним из примеров базы данных 311 является справочная база данных. Кроме того, параметры 105 взлета самолета, используемые для определения настроек 315 балансировки при взлете, могут быть переданы непосредственно в контроллер 310 управления балансировкой. В качестве альтернативы некоторые аспекты, связанные с операциями, при которых определяют настройки 315 балансировки при взлете и/или передают параметры 105 взлета самолета, могут быть осуществлены пилотом. Например, пилот может вручную ввести по меньшей мере некоторые из параметров 105 взлета самолета (представленных в полетном листе 385) в контроллер 310 управления балансировкой. Кроме того, пилот может вручную определить настройки 315 балансировки при взлете (на основании параметров 105 взлета самолета) с использованием, например, визуального представления базы данных 311, например на пользовательском интерфейсе контроллера 310 управления балансировкой или бумажном носителе.
В некоторых вариантах реализации контроллер 310 управления балансировкой соединен с возможностью обмена данными с датчиком 380 (или множеством датчиков) самолета 100, выполненным с возможностью генерирования по меньшей мере некоторых параметров 105 взлета самолета и возможностью их передачи в контроллер 310 управления балансировкой. Одним из примеров датчика 380 является датчик веса шасси. При установке датчика веса в шасси или, в частности, в каждое шасси самолета 100 объединенные выходные данные этих датчиков могут быть использованы для определения общего веса самолета 100 и положения центра тяжести.
Настройки 315 балансировки при взлете содержат настройку 315а ориентации стабилизатора и настройку 315b ориентации руля высоты. Одним из примеров настройки 315а ориентации стабилизатора является угол отклонения стабилизатора 110 по отношению к нейтральному положению стабилизатора 110.
Контроллер 310 управления балансировкой соединен с возможностью обмена данными по меньшей мере с одним из механизма 112 задания ориентации стабилизатора и механизма 122 ориентирования руля высоты. В дальнейшем настройку 315а ориентации стабилизатора передают в механизм 112 задания ориентации стабилизатора для управления ориентацией (например, углом отклонения) стабилизатора 110.
Стабилизатор 110 механически соединен с механизмом 112 задания ориентации стабилизатора. Механизм 112 задания ориентации стабилизатора может представлять собой гидравлический механизм, электрический механизм или механизм иных типов, выполненный с возможностью измерения ориентации.
Настройку 315b ориентации руля высоты передают в механизм 122 ориентирования руля высоты для управления ориентацией (например, углом отклонения) руля 120 высоты. Руль 120 высоты механически соединен с механизмом 122 ориентирования руля высоты. Механизм 122 ориентирования руля высоты может представлять собой гидравлический механизм, электрический механизм или иные типы механизма, выполненного с возможностью изменения ориентации. Благодаря использованию руля 120 высоты в качестве основного устройства для маневрирования самолетом 100 руль 120 высоты выполнен с возможностью быстрого перемещения.
Стабилизатор 110 первоначально используют в качестве балансирующего устройства, что означает, что стабилизатор 110 не совершает быстрого перемещения, в частности благодаря большому размеру стабилизатора 110. Более высокие скорости перемещения вызывают многие проблемы в части конструкции механизма задания ориентации стабилизатора. Благодаря небольшому размеру руля 120 высоты по сравнению со стабилизатором 110 механизм 122 ориентирования руля высоты может изменять ориентацию руля 120 высоты быстрее, чем механизм 112 задания ориентации стабилизатора может изменить ориентацию стабилизатора 110. Кроме того, следует отметить, что механизм 122 ориентирования руля высоты также управляется контроллером 360 управления полетом. Другими словами, настройку 315b ориентации руля высоты принимают механизмом 122 ориентирования руля высоты от контроллера 310 управления балансировкой и от контроллера управления полетом. Полный рабочий диапазон руля 120 высоты разделен на поддиапазон руля высоты при взлете и допустимые пределы управления полетом, как дополнительно пояснено в данном документе.
Настройки 315 балансировки при взлете определяют контроллером 310 управления балансировкой (или пилотом) на основании параметров 105 взлета самолета. Некоторыми примерами параметров 105 взлета самолета являются вес самолета, центр тяжести самолета, настройка положения закрылков самолета и настройки тяги при взлете самолета. Влияние веса самолета по меньшей мере на настройку 315а ориентации стабилизатора описано выше. Специалист в данной области техники сможет понять воздействие других параметров 105 взлета самолета на настройки 315 балансировки при взлете.
Система 350 управления полетом содержит контроллер 360 управления полетом, выполненный с возможностью генерирования настройки 315b ориентации руля высоты и возможностью передачи этих настроек в механизм 122 ориентирования руля высоты для изменения ориентации руля 120 высоты. Специалист в данной области техники сможет понять, что контроллер 360 управления полетом также выполнен с возможностью генерирования различных других инструкций по управлению полетом, используемых другими компонентами самолета 100, некоторые из которых описаны выше.
Примеры способа
На ФИГ. 5 показана блок-схема, соответствующая способу 500 управления системой 300 балансировки самолета 100 в соответствии с некоторыми вариантами реализации. Некоторые операции способа 500 осуществляют перед взлетом самолета 100, а иные операции могут быть осуществлены во время взлета и после него.
Способ 500 может начинаться с получения параметров 105 взлета самолета во время необязательной операции 510. Некоторыми примерами параметров 105 взлета самолета являются вес самолета, центр тяжести самолета, настройка положения закрылков при взлете и настройки тяги при взлете. Параметры 105 взлета самолета могут быть приняты различными способами, например могут быть вручную введены пилотом из полетного листа 385 и/или автоматически приняты от одной или более внешних систем (например, систем аэропорта) или датчиков 380 самолета 100. В последнем случае необязательная операция 510 также включает прием выходных данных датчика во время необязательной операции 515.
Способ 500 включает определение настроек 315 балансировки при взлете во время операции 520. Настройки 315 балансировки при взлете определяют на основании параметров 105 взлета самолета. Операция 520 может быть осуществлена контроллером 310 управления балансировкой и может быть полностью автоматизирована. В качестве альтернативы по меньшей мере некоторые аспекты необязательной операции 510 могут быть осуществлены вручную, например пилотом, с использованием справочной базы данных (например, электронной базы данных или печатной таблицы).
Как указано выше, настройки 315 балансировки при взлете содержат настройку 315а ориентации стабилизатора и настройку 315b ориентации руля высоты. Настройка 315b ориентации руля высоты может находиться в пределах поддиапазона 602 руля высоты при взлете из полного рабочего диапазона 600 руля высоты. Дополнительные настройки ориентации руля высоты (например, за пределами поддиапазона 602 руля высоты при взлете) могут быть обеспечены контроллером 360 управления полетом. Это разделение полного рабочего диапазона 600 руля высоты между контроллером 360 управления полетом и контроллером 310 управления балансировкой позволяет достигнуть двойной функциональности руля 120 высоты, как будет пояснено со ссылкой на ФИГ. 6.
На ФИГ. 6 схематически показан полный рабочий диапазон 600 руля высоты, который включает поддиапазон 602 руля высоты при взлете, а также допустимые пределы 604а и 604b управления полетом. Допустимые пределы 604а и 604b управления полетом в совокупности могут называться допустимыми пределами 604 управления полетом. Допустимые пределы 604а и 604b управления полетом могут иметь одни и те же диапазоны. Поддиапазон 602 руля высоты при взлете задан и отделен границами 602а и 602b взлета от допустимых пределов 604а и 604b управления полетом. На ФИГ. 6 также показана нейтральная ориентация 601 руля 120 высоты. В некоторых вариантах реализации нейтральная ориентация 601 может быть размещена в середине полного рабочего диапазона 600 руля высоты таким образом, что руль 120 высоты может совершать перемещение (например, разворот) на одинаковые величины по каждую сторону от нейтральной ориентации 601. Кроме того, нейтральная ориентация 601 может находиться в середине поддиапазона 602 руля высоты при взлете.
Отношение поддиапазона 602 руля высоты при взлете к полному рабочему диапазону 600 руля высоты может зависеть от заданного поддиапазона стабилизатора, отклонения руля высоты от своего положения балансировки при взлете, используемого для осуществления поворота при взлете, и отклонения руля высоты от своего положения балансировки при взлете, используемого для обеспечения соответствия другим конструктивным аспектам самолета, и может находиться между приблизительно от одной третьей до половины от полного рабочего диапазона. В целом, поддиапазон 602 руля высоты при взлете может быть задан на основании пространственных положений руля 120 высоты для управления полетом. Другими словами, конкретный минимальный диапазон выделен для одного из допустимых пределов 604а и 604b управления полетом или их обеих на основании пространственных положений для управления полетом.
Согласно ФИГ. 5, при определении настроек 315 балансировки при взлете во время операции 520 настройку 315а ориентации стабилизатора и настройку 315b ориентации руля высоты можно рассматривать как две зависимые переменные (обе зависят от параметров 105 взлета самолета). Настройка 315а ориентации стабилизатора и настройка 315b ориентации руля высоты зависят друг от друга. В силу этого для каждого набора параметров 105 взлета самолета могут быть доступны различные комбинации из настройки 315а ориентации стабилизатора и настройки 315b ориентации руля высоты. В некоторых реализациях для заданной ориентации стабилизатора будет использована единственная настройка ориентации руля высоты.
Во время фактического взлета самолета 100 и после него ориентация руля 120 высоты может быть изменена намного быстрее, чем ориентация стабилизатора 110. В то же время ориентацию руля 120 высоты также используют для управления полетом (в отношении разделения полного рабочего диапазона 600 руля высоты, описанного выше со ссылкой на ФИГ. 6). В свете этих причин в некоторых вариантах реализации для заданного набора параметров 105 взлета самолета настройка 315b ориентации руля высоты может рассматриваться в качестве независимой переменной, а настройка 315а ориентации стабилизатора может рассматриваться в качестве зависимой переменной. В этих вариантах реализации операция 520 может включать выбор некоторой первоначальной настройки ориентации руля высоты (во время необязательной операции 522), определение первоначальной настройки ориентации стабилизатора на основании первоначальной настройки ориентации руля высоты (во время необязательной операции 523) и сравнение первоначальной настройки ориентации стабилизатора с рабочими состояниями (во время необязательной операции 524). В зависимости от состояний, заданных для первоначального руля высоты, и настроек ориентации стабилизатора (проверенных во время операции 525 и/или операции 526) необязательная операция 522, необязательная операция 523 и необязательная операция 524 могут быть повторены до тех пор, пока не будут обнаружены первоначальные настройки с заданным диапазоном, при этом эти первоначальные настройки выбраны в качестве настройки 315b ориентации руля высоты, а первоначальную настройку ориентации стабилизатора выбрана в качестве настройки 315а ориентации стабилизатора (во время необязательной операции 527).
Различные примеры выбора первоначальных настроек ориентации руля высоты и оценки первоначальных настроек руля высоты и ориентации стабилизатора находятся в пределах объема. Например, одна из границ 602а взлета может быть выбрана в качестве первоначальной настройки ориентации руля высоты во время необязательной операции 522. В качестве альтернативы нейтральная ориентация 601 руля 120 высоты может быть выбрана в качестве первоначальной настройки ориентации руля высоты во время необязательной операции 522. Настройка 315а ориентации стабилизатора может быть в дальнейшем определена на основании этого выбора первоначальной ориентации руля высоты во время необязательной операции 523 (а также на основании параметров 105 взлета самолета). Для данной операции могут быть использованы базы данных (например, справочная таблица) и/или компьютерные алгоритмы.
В некоторых вариантах реализации оценку первоначальных настроек руля высоты и ориентации стабилизатора осуществляют во время операций 525 и 526. Например, операция 525 включает проверку, находится ли первоначальная настройка ориентации руля высоты в пределах порогового значения по отношению к нейтральной ориентации 601. Пороговое значение может быть меньше 10% или даже меньше 5% от полного рабочего диапазона руля 120 высоты. Операция 525 может включать сравнение первоначальной настройки ориентации руля высоты с нейтральной ориентацией 601 руля 120 высоты, а первоначальная настройка ориентации стабилизатора может находится в пределах рабочих состояний 220. В некоторых вариантах реализации если можно привести первоначальную настройку ориентации руля высоты ближе к нейтральной ориентации 601 руля 120 высоты, а первоначальная настройка ориентации стабилизатора сохраняется в пределах рабочих состояний 220, необязательная операция 522, необязательная операция 523 и необязательная операция 524 могут быть повторены. Этот алгоритм обеспечивает достижение наименьшего отклонения при управлении рулем высоты.
Еще в одном примере операция 526 включает сравнение первоначальной настройки ориентации стабилизатора с рабочими состояниями с тем, чтобы узнать, находится ли первоначальная настройка ориентации стабилизатора в пределах заданного порогового значения от среднего рабочих состояний 220. Задача заключается в получении настройки 315а ориентации стабилизатора, которая наиболее удалена от нерабочих состояний 210. Например, пороговое значение может быть меньше 10% или даже меньше 5% от полного рабочего диапазона стабилизатора 110.
Когда настройка 315b ориентации руля высоты (составляющая настроек 315 балансировки при взлете), обеспеченная системой 300 балансировки, не соответствует нейтральной ориентации 601 руля 120 высоты, может иметься отклонение при управлении рулем высоты. В некоторых вариантах реализации отклонение для управления рулем высоты уменьшено или даже устранено во время необязательной операции 540. Различные аспекты этой операции будут описаны со ссылкой на ФИГ. 7А и 7В. В частности, на ФИГ. 7А показан один из примеров настройки 315b ориентации руля высоты, обеспеченной системой 300 балансировки и представленной на ФИГ. 7А на полном рабочем диапазоне 600 руля высоты. В этом примере настройка 315b ориентации руля высоты (определенная во время операции 520) не соответствует нейтральной ориентации 601. Настройка 315b ориентации руля высоты делит полный рабочий диапазон 600 руля высоты на два неравных рабочих поддиапазона, то есть на первый рабочий поддиапазон 614а и второй рабочий поддиапазон 614b. Несмотря на то, что руль 120 высоты является полностью функциональным для управления полетом в этих соответствующих рабочих поддиапазонах, наличие этих неравных рабочих поддиапазонов и руля 120 высоты, присутствующего в настройке 315b ориентации руля высоты, по меньшей мере может дезориентировать пилота. Для оценки отклонения при управлении рулем высоты настройка 315b ориентации руля высоты является присвоенной нейтральной контрольной точкой 621, которая может находиться в середине полного диапазона 620 управления рулем высоты (касательно соответствия между ФИГ. 7А и 7В). В силу этого нейтральная контрольная точка 621 разделяет полный диапазон 620 управления рулем высоты на равные поддиапазоны управления, то есть на первый поддиапазон 624а управления и второй поддиапазон 624b управления. В этом примере первый поддиапазон 624а управления соответствует первому рабочему поддиапазону 614а, а второй рабочий поддиапазон 624b управления соответствует второму поддиапазону 624b управления. В некоторых вариантах реализации каждый из первого поддиапазона 624а управления и второго поддиапазона 624b управления пропорционально регулируют для охвата полного рабочего диапазона 600 руля высоты. В качестве альтернативы только часть полного рабочего диапазона 600 руля высоты основана на наименьшем из первого рабочего поддиапазона 614а и второго рабочего поддиапазона 614b.
Способ 500 переходит к регулированию фактической ориентации стабилизатора 110 (например, угла отклонения стабилизатора 110) во время операции 532. Эта ориентация может быть отрегулирована с использованием механизма 112 задания ориентации стабилизатора и в соответствии с настройкой 315а ориентации стабилизатора, определенной во время операции 520. Операцию 532 осуществляют перед взлетом самолета 100. Кроме того, ориентация стабилизатора 110 может быть дополнительно отрегулирована после взлета (осуществлена во время необязательной операции 550, показанной на ФИГ. 5). Этот тип регулировки стабилизатора дополнительно описан ниже со ссылкой на операцию 560.
Способ 500 также включает регулирование ориентации руля 120 высоты (например, угла отклонения руля 120 высоты) во время операции 530. Например, ориентация может быть отрегулирована с использованием механизма 122 ориентирования руля высоты и в соответствии с настройкой 315b ориентации руля высоты, определенной во время операции 520. Операцию 530 также осуществляют перед взлетом самолета 100. Дополнительное регулирование ориентации руля высоты во время взлета и после него осуществляют в качестве составляющей управления полетом.
В некоторых вариантах реализации способ 500 дополнительно включает инициирование взлета самолета 100 во время необязательной операции 550. Необязательную операцию 550 осуществляют при ориентации стабилизатора 110, соответствующей настройке 315а ориентации стабилизатора, которая является частью настроек 315 балансировки при взлете. Кроме того, ориентация руля 120 высоты по меньшей мере первоначально соответствует настройке 315b ориентации руля высоты (составляющей настроек 315 балансировки при взлете). Во время необязательной операции 550 или впоследствии ориентация руля 120 высоты может быть изменена в качестве составляющей управления полетом, что отражено блоком 555 на ФИГ. 5.
В некоторых вариантах реализации способ 500 может дополнительно включать изменение ориентации стабилизатора 110 после завершения взлета (во время необязательной операции 550) во время операции 560. Например, ориентация стабилизатора 110 может быть изменена, например для приведения нейтральной контрольной точки 621 в соответствие с нейтральной ориентацией 601 руля 120 высоты, что исключает отклонение при управлении рулем высоты или по меньшей мере уменьшает отклонение при управлении рулем высоты. Другими словами, настройки 315 балансировки при взлете могут быть изменены после взлета.
Примеры контроллеров
На ФИГ. 8 показана система 800 обработки данных, которая выполнена в соответствии с некоторыми вариантами реализации и которая может быть использована в качестве контроллера 310 управления балансировкой. Система 800 обработки данных, также называемая в данном документе компьютерной системой, может быть использована для реализации одного или более компьютеров или обрабатывающих устройств, используемых для управления различными компонентами вышеописанных устройств и систем. В некоторых вариантах реализации система 800 обработки данных содержит модуль 802 связи, который обеспечивает связь между процессорным блоком 804, памятью 806, запоминающим устройством 808 для длительного хранения данных, блоком 810 связи, блоком 812 ввода-вывода и дисплеем 814. В этом примере модуль 802 связи может представлять собой систему шин.
Процессорный блок 804 предназначен для исполнения инструкций программного обеспечения, которое может быть загружено в память 806.
Процессорный блок 804 может представлять собой некоторое количество процессоров, которые могут входить в состав многопроцессорного ядра. В различных вариантах реализации процессорный блок 804 специально выполнен и оптимизирован для обработки данных, таких как параметры 105 взлета самолета. Таким образом, процессорный блок 804 может представлять собой специализированный процессор, который может быть реализован в виде одной или более специализированных интегральных схем (ASIC) в обрабатывающей системе. Такая специальная конфигурация процессорного блока 804 может обеспечивать повышенную эффективность при обработке данных специальных типов, связанных с ранее описанными системами, устройствами и способами. Кроме того, в некоторых вариантах реализации процессорный блок 804 может содержать одно или более перепрограммируемых логических устройств, таких как вентильная матрица с эксплуатационным программированием (FPGA), которая может быть запрограммирована или специально настроена для оптимального осуществления ранее описанных обрабатывающих операций в контексте больших и сложных массивов данных.
Память 806 и запоминающее устройство 808 для длительного хранения данных являются примерами запоминающих устройств 816. Запоминающее устройство является любой частью аппаратных средств, выполненных с возможностью временного и/или постоянного хранения информации, такой как, например, данные, программный код в функциональной форме и/или другой подходящей информации, в частности в качестве конкретного примера в базе данных 311. В этих иллюстративных примерах запоминающие устройства 816 также могут называться компьютерочитаемыми запоминающими устройствами. В этих примерах память 806 может представлять собой, например, оперативное запоминающее устройство или любое другое подходящее энергонезависимое или энергозависимое запоминающее устройство. Запоминающее устройство 808 для длительного хранения данных может принимать различные формы в зависимости от конкретной реализации. Например, запоминающее устройство 808 для длительного хранения данных может содержать один или более компонентов или устройств. Например, запоминающее устройство 808 для длительного хранения данных может представлять собой накопитель на жестких дисках, флеш-память, перезаписываемый оптический диск, перезаписываемую магнитную ленту или их некоторое сочетание. Носитель, используемый запоминающим устройством 808 для длительного хранения данных, также может быть выполнен съемным. Например, съемный накопитель на жестких дисках может быть использован для запоминающего устройства 808 для длительного хранения данных.
В этих иллюстративных примерах блок 810 связи обеспечивает связь с другими системами или устройствами для обработки данных, такими как датчики 380 и внешние системы (например, системы аэропорта). В этих иллюстративных примерах блок 810 связи представляет собой сетевую интерфейсную плату.
Блок 812 ввода-вывода позволяет вводить и выдавать данные с использованием иных устройств, которые могут быть соединены с системой 800 обработки данных. Например, блок 812 ввода-вывода может обеспечивать связь для ввода пользователем данных посредством клавиатуры, манипулятора типа «мышь» и/или некоторого другого подходящего устройства ввода. Кроме того, блок 812 ввода-вывода может отправлять выходные данные в принтер. Дисплей 814 обеспечивает механизм отображения информации пользователю, например отображения пилоту параметров 105 взлета самолета.
Инструкции для операционной системы, приложений и/или программ могут быть размещены в запоминающих устройствах 816, которые связаны с возможностью обмена данными с процессорным блоком 804 посредством модуля 802 связи. Процессы различных вариантов реализации могут быть осуществлены процессорным блоком 804 с использованием реализуемых на компьютере инструкций, которые могут быть размещены в памяти, такой как память 806.
Эти инструкции называются программным кодом, компьютерным программным кодом или машиночитаемым программным кодом, который может быть считан и исполнен процессором в процессорном блоке 804. В разных вариантах реализации программный код может быть реализован на другом физическом или компьютерочитаемом носителе данных, такой как память 806 или запоминающее устройство 808 для длительного хранения данных.
Программный код 818 размещен в функциональной форме на компьютерочитаемого носителя 820, который является выборочно извлекаемым и который может быть загружен или передан в систему 800 обработки данных для исполнения процессорным блоком 804. В этих иллюстративных примерах программный код 818 и компьютерочитаемый носитель 820 формируют компьютерный программный продукт 822. В одном из примеров компьютерочитаемый носитель 820 может представлять собой компьютерочитаемый носитель 824 для хранения или компьютерочитаемый носитель 826 сигналов. В этих иллюстративных примерах компьютерочитаемый носитель 824 для хранения представляет собой физическое или материальное запоминающее устройство, используемое для хранения программного кода 818.
В качестве альтернативы программный код 818 может быть передан в систему 800 обработки данных с использованием компьютерочитаемого носителя 826 сигналов. Компьютерочитаемый носитель 826 сигналов может представлять собой, например, распространяемый сигнал данных, который может содержать программный код 818. Например, компьютерочитаемый носитель 826 сигналов может представлять собой электромагнитный сигнал, оптический сигнал и/или сигнал любого другого подходящего типа. Эти сигналы могут быть переданы по линиям связи, таким как беспроводные линии связи, волоконно-оптический кабель, коаксиальный кабель, провод и/или линия связи любого другого подходящего типа.
Не следует считать, что различные компоненты, показанные для системы 800 обработки данных, вводят конструктивные ограничения способом, согласно которому могут быть реализованы разные варианты реализации. Разные альтернативные варианты реализации могут быть реализованы в системе обработки данных, содержащей компоненты в дополнение к компонентам, показанным для системы 800 обработки данных, и/или вместо них. Иные компоненты, показанные на ФИГ. 8, могут отличаться от показанных иллюстративных примеров. Разные варианты реализации могут быть реализованы с использованием любого аппаратного устройства или системы, выполненной с возможностью запуска программного кода 818.
Примеры самолетов
Несмотря на то, что представленные выше системы, устройство и способы были описаны в отношении самолетов и авиакосмической промышленности, следует учитывать, что варианты реализации, описанные в данном документе, также могут быть использованы и в любой другой области, такой как автомобильная область, железнодорожная область и иные механические и транспортные области.
Соответственно, варианты реализации настоящего изобретения могут быть описаны в контексте способа 900 изготовления и обслуживания самолетов, показанного на ФИГ. 9, и самолета 100, показанного на ФИГ. 10. Во время подготовки к изготовлению способ 900 может включать проработку и проектирование 904 самолета 100 и материальное снабжение 906. Во время изготовления происходит производство 908 компонентов и подузлов и интеграция 910 систем самолета 100. Впоследствии самолет 100 может пройти через сертификацию и поставку 912 для его помещения на обслуживание 914. При нахождении на обслуживании заказчиком для самолета 100 составляют расписание планового технического обеспечения и обслуживания 916 (которое может также включать модификацию, перенастройку, восстановление и т.п.).
Каждый из процессов способа 900 может быть осуществлен или выполнен системным интегратором, третьей стороной и/или оператором (например, заказчиком). Для целей данного описания системный интегратор может содержать любое количество производителей самолетов и основных субподрядчиков систем; третья сторона может содержать любое количество продавцов, субподрядчиков и поставщиков; а оператор может представлять собой авиалинию, лизинговую компанию, военную организацию, организацию технического обслуживания и т.п.
Как показано на ФИГ. 10, самолет 100, изготовленный способом 900, может содержать корпус 918 с множеством систем 920 и внутреннюю часть 922. Примеры систем 920 содержат одну или более из движительной системы 924, электрической системы 926, гидравлической системы 928 и климатической системы 930. Может быть включено любое количество иных систем. Несмотря на то, что пример показан для аэрокосмической промышленности, принципы вариантов реализации, описанные в данном документе, могут быть применены и в других отраслях промышленности, таких автомобильная промышленность.
Несмотря на то, что представленные выше идеи были описаны с некоторой степенью подробности для обеспечения их однозначного понимания, очевидно, что конкретные изменения и модификации могут быть реализованы в пределах объема прилагаемой формулы изобретения. Существует множество альтернативных способов реализации процессов, систем и устройства. Соответственно, следует считать, что представленные примеры являются иллюстративными, а не ограничительными.
Заключение
Иллюстративные неисключительные примеры патентоспособных признаков настоящего изобретения описаны в следующих пронумерованных параграфах.
А1. Способ 500 управления системой 300 балансировки самолета 100, включающий:
- определение настроек 315 балансировки при взлете на основании параметров 105 взлета самолета,
при этом настройки 315 балансировки при взлете содержат настройку 315а ориентации стабилизатора и настройку 315b ориентации руля высоты, а
параметры 105 взлета самолета содержат по меньшей мере один параметр, выбранный из веса самолета, центра тяжести самолета, настройки положения закрылков при взлете или настройки тяги при взлете;
регулирование, с использованием механизма 112 задания ориентации стабилизатора самолета 100, ориентации стабилизатора 110 самолета 100 в соответствии с настройкой 315а ориентации стабилизатора из настроек 315 балансировки при взлете; и
- регулирование, с использованием механизма 122 ориентирования руля высоты самолета 100, ориентации руля 120 высоты самолета 100 в соответствии с настройкой 315b ориентации руля высоты из настроек 315 балансировки при взлете.
А2. Способ 500 по параграфу А1, согласно которому настройка 315b ориентации руля высоты из настроек 315 балансировки при взлете отличается от нейтральной ориентации 601 руля 120 высоты.
A3. Способ 500 по параграфу А1 или А2, согласно которому настройка 315а ориентации стабилизатора и настройка 315b ориентации руля высоты из настроек 315 балансировки при взлете зависят друг от друга.
А4. Способ 500 по параграфу A3, согласно которому определение настроек 315 балансировки при взлете включает определение настройки 315а ориентации стабилизатора на основании настройки 315b ориентации руля высоты.
А5. Способ 500 по параграфу А4, согласно которому определение настройки 315а ориентации стабилизатора на основании настройки 315b ориентации руля высоты включает:
выбор первоначальной настройки ориентации руля высоты;
определение первоначальной настройки ориентации стабилизатора на основании первоначальной настройки ориентации руля высоты;
сравнение первоначальной настройки ориентации стабилизатора с рабочими состояниями 220;
выбор первоначальной настройки ориентации руля высоты в качестве настройки 315b ориентации руля высоты и первоначальной настройки ориентации стабилизатора в качестве настройки 315а ориентации стабилизатора.
А6. Способ 500 по параграфу А5, согласно которому первоначальная настройка ориентации руля высоты является предельным значением 602а для взлета из поддиапазона 602 руля высоты при взлете, при этом поддиапазон 602 руля высоты при взлете является составляющей полного рабочего диапазона 600 руля высоты, полный рабочий диапазон 600 руля высоты дополнительно содержит один или более допустимых пределов 604 управления полетом, а поддиапазон 602 руля высоты при взлете задан на основании пространственных положений руля 120 высоты для управления полетом.
А7. Способ 500 по параграфу А5, согласно которому первоначальная настройка ориентации руля высоты является нейтральной ориентацией 601 руля 120 высоты.
А8. Способ 500 по параграфу А5, А6 или А7, согласно которому выбор первоначальной настройки ориентации руля высоты, определение первоначальной настройки ориентации стабилизатора и сравнение первоначальной настройки ориентации стабилизатора с рабочими состояниями 220 повторяют до тех пор, пока первоначальная настройка ориентации стабилизатора не будет находится в пределах заданного порогового значения от среднего рабочих состояний 220.
А9. Способ 500 по параграфу А5, А6 или А7, согласно которому выбор первоначальной настройки ориентации руля высоты, определение первоначальной настройки ориентации стабилизатора и сравнение первоначальной настройки ориентации стабилизатора с рабочими состояниями 220 повторяют до тех пор, пока первоначальная настройка ориентации руля высоты не будет находится в пределах заданного порогового значения по отношению к нейтральной ориентации 601, а первоначальная настройка ориентации стабилизатора не будет находиться в пределах рабочих состояний 220.
А10. Способ 500 по любому из параграфов А1-А9, дополнительно включающий при условии, что настройка 315b ориентации руля высоты отличается от нейтральной ориентации 601, уменьшение отклонения при управлении рулем высоты в системе 350 управления полетом.
A11. Способ 500 по любому из параграфов A - А10, согласно которому система 350 управления полетом представляет собой электродистанционную систему управления.
А12. Способ 500 по любому из параграфов А1 - А11, согласно которому определение настроек 315 балансировки при взлете осуществляют с использованием базы данных 311.
А13. Способ 500 по любому из параграфов А1 - А11, дополнительно включающий инициирование взлета самолета 100, при этом ориентация стабилизатора 110 соответствует настройке 315а ориентации стабилизатора, а ориентация руля 120 высоты соответствует настройке 315b ориентации руля высоты.
А14. Способ 500 по параграфу А13, дополнительно включающий изменение ориентации стабилизатора 110 после взлета до тех пор, пока нейтральная контрольная точка 621 системы 350 управления полетом не будет соответствовать нейтральной ориентации 601 руля 120 высоты.
А15. Способ 500 по любому из параграфов А1-А14, дополнительно включающий прием параметров 105 взлета самолета.
А16. Способ 500 по параграфу А15, согласно которому по меньшей мере один из параметров 105 взлета самолета принимают от датчика 380 самолета 100.
А17. Способ 500 по параграфу А16, согласно которому датчик самолета 100 содержит датчик веса, установленный в шасси самолета 100.
В1. Система 300 балансировки самолета 100, содержащая:
- контроллер 310 управления балансировкой, выполненный с возможностью определения настроек 315 балансировки при взлете самолета 100 на основании параметров 105 взлета самолета,
при этом настройки 315 балансировки при взлете содержат настройку 315а ориентации стабилизатора и настройку 315b ориентации руля высоты, а
параметры 105 взлета самолета содержат по меньшей мере один параметр, выбранный из веса самолета, центра тяжести самолета, настройки положения закрылков самолета или настройки тяги при взлете самолета;
- механизм 112 задания ориентации стабилизатора, выполненный с возможностью управления на основании настройки 315а ориентации стабилизатора;
- стабилизатор 110, механически соединенный с механизмом 112 задания ориентации стабилизатора,
при этом механизм 112 задания ориентации стабилизатора выполнен с возможностью изменения ориентации стабилизатора 110 на основании настройки 315а ориентации стабилизатора; а система балансировки также содержит:
механизм 122 ориентирования руля высоты, выполненный с возможностью управления на основании настройки 315b ориентации руля высоты; и
руль 120 высоты, механически соединенный с механизмом 122 ориентирования руля высоты,
при этом механизм 122 ориентирования руля высоты выполнен с возможностью изменения ориентации руля 120 высоты на основании настройки 315b ориентации руля высоты.
В2. Система 300 балансировки по параграфу В1, в которой контроллер 310 управления балансировкой соединен с возможностью
обмена данными по меньшей мере с одним из механизма 112 задания ориентации стабилизатора и механизма 122 ориентирования руля высоты.
B3. Система 300 балансировки по любому из параграфов В1 и В2, в которой контроллер 310 управления балансировкой выполнен с возможностью приема настройки 315b ориентации руля высоты от контроллера 360 управления полетом и с возможностью определения настройки 315а ориентации стабилизатора на основании настройки 315b ориентации руля высоты, принятой от контроллера 360 управления полетом.
B4. Система 300 балансировки по любому из параграфов В1 - В3, в которой настройка 315b ориентации руля высоты из настроек 315 балансировки при взлете отличается от нейтральной ориентации 601 руля 120 высоты.
B5. Система 300 балансировки по любому из параграфов B1 - В4, в которой настройка 315а ориентации стабилизатора и настройка 315b ориентации руля высоты из настроек 315 балансировки при взлете зависят друг от друга.
B6. Система 300 балансировки по любому из параграфов B1 - В5, в которой контроллер 310 управления балансировкой выполнен с возможностью определения настройки 315а ориентации стабилизатора на основании настройки 315b ориентации руля высоты.
B7. Система 300 балансировки по параграфу В6, в которой контроллер 310 управления балансировкой выполнен с возможностью:
выбора первоначальной настройки ориентации руля высоты; определения первоначальной настройки ориентации стабилизатора на основании первоначальной настройки ориентации руля высоты;
сравнения первоначальной настройки ориентации стабилизатора с рабочими состояниями 220;
выбора первоначальной настройки ориентации руля высоты в качестве настройки 315b ориентации руля высоты и первоначальной настройки ориентации стабилизатора в качестве настройки 315а ориентации стабилизатора.
B8. Система 300 балансировки по параграфу В7, в которой первоначальная настройка ориентации руля высоты является предельным значением 602а для взлета из поддиапазона 602 руля высоты при взлете, при этом поддиапазон 602 руля высоты при взлете является составляющей полного рабочего диапазона 600 руля высоты, полный рабочий диапазон 600 руля высоты дополнительно содержит один или более допустимых пределов 604 управления полетом, а поддиапазон 602 руля высоты при взлете задан на основании пространственных положений руля 120 высоты для управления полетом.
B9. Система 300 балансировки по параграфу В7, в которой первоначальная настройка ориентации руля высоты является нейтральной ориентацией 601 руля 120 высоты.
В10. Система 300 балансировки по любому из параграфов В7-В9, в которой контроллер 310 управления балансировкой выполнен с возможностью повторного осуществления выбора первоначальной настройки ориентации руля высоты, определения первоначальной настройки ориентации стабилизатора и сравнения первоначальной настройки ориентации стабилизатора с рабочими состояниями 220 до тех пор, пока первоначальная настройка ориентации стабилизатора не будет находится в пределах заданного порогового значения от среднего рабочих состояний 220.
В11. Система 300 балансировки по любому из параграфов В7 - В9, в которой контроллер 310 управления балансировкой выполнен с возможностью повторного выбора первоначальной настройки ориентации руля высоты, определения первоначальной настройки ориентации стабилизатора и сравнения первоначальной настройки ориентации стабилизатора с рабочими состояниями 220 до тех пор, пока первоначальная настройка ориентации руля высоты не будет находится в пределах заданного порогового значения от нейтральной ориентации 601, а первоначальная настройка ориентации стабилизатора находится в пределах рабочих состояний 220.
B12. Система 300 балансировки по любому из параграфов В1 - В11, в которой контроллер 310 управления балансировкой выполнен с возможностью уменьшения отклонения при управлении рулем высоты в системе 350 управления полетом при условии, что настройка 315b ориентации руля высоты отличается от нейтральной ориентации 601.
B13. Система 300 балансировки по любому из параграфов В1 - В12, в которой система 350 управления полетом представляет собой электродистанционную систему управления.
B14. Система 300 балансировки по любому из параграфов В1 - В13, дополнительно содержащая базу данных 311, при этом контроллер 310 управления балансировкой выполнен с возможностью определения настроек 315 балансировки при взлете с использованием базы данных 311.
B15. Система 300 балансировки по любому из параграфов В1 - В14, дополнительно содержащая один или более датчиков 380 для передачи по меньшей мере одного из параметров 105 взлета самолета в контроллер 310 управления балансировкой.
В16. Система 300 балансировки по любому из параграфов В1 - В15, в которой один или более датчиков самолета 100 содержат датчик веса, установленный в шасси самолета 100.
С1. Самолет 100, содержащий:
- контроллер 310 управления балансировкой, выполненный с возможностью определения настроек 315 балансировки при взлете самолета 100 на основании параметров 105 взлета самолета,
при этом настройки 315 балансировки при взлете содержат настройку 315а ориентации стабилизатора и настройку 315b ориентации руля высоты, а
параметры 105 взлета самолета содержат по меньшей мере один параметр, выбранный из веса самолета, центра тяжести самолета, настройки положения закрылков самолета или настройки тяги при взлете самолета;
- механизм 112 задания ориентации стабилизатора, выполненный с возможностью управления на основании настройки 315а ориентации стабилизатора;
- стабилизатор 110, механически соединенный с механизмом 112 задания ориентации стабилизатора,
при этом механизм 112 задания ориентации стабилизатора выполнен с возможностью изменения ориентации стабилизатора 110 на основании настройки 315а ориентации стабилизатора; а самолет также содержит:
механизм 122 ориентирования руля высоты, выполненный с возможностью управления на основании настройки 315b ориентации руля высоты; и
руль 120 высоты, механически соединенный с механизмом 122 ориентирования руля высоты,
при этом механизм 122 ориентирования руля высоты выполнен с возможностью изменения ориентации руля 120 высоты на основании настройки 315b ориентации руля высоты.
С2. Самолет 100 по параграфу С1, в котором контроллер 310 управления балансировкой соединен с возможностью обмена данными по меньшей мере с одним из механизма 112 задания ориентации стабилизатора и механизма 122 ориентирования руля высоты.
С3. Самолет 100 по любому из параграфов С1 и С2, в котором контроллер 310 управления балансировкой выполнен с возможностью приема настройки 315b ориентации руля высоты от контроллера 360 управления полетом и с возможностью определения настройки 315а ориентации стабилизатора на основании настройки 315b ориентации руля высоты, принятой от контроллера 360 управления полетом.
С4. Самолет 100 по любому из параграфов С1 - С3, в котором настройка 315b ориентации руля высоты из настроек 315 балансировки при взлете отличается от нейтральной ориентации 601 руля 120 высоты.
С5. Самолет 100 по любому из параграфов C1 - С4, в котором настройка 315а ориентации стабилизатора и настройка 315b ориентации руля высоты из настроек 315 балансировки при взлете зависят друг от друга.
С6. Самолет 100 по любому из параграфов C1 - С5, в котором контроллер 310 управления балансировкой выполнен с возможностью определения настройки 315а ориентации стабилизатора на основании настройки 315b ориентации руля высоты.
С7. Самолет 100 по параграфу С6, в котором контроллер 310 управления балансировкой выполнен с возможностью:
выбора первоначальной настройки ориентации руля высоты;
определения первоначальной настройки ориентации стабилизатора на основании первоначальной настройки ориентации руля высоты;
сравнения первоначальной настройки ориентации стабилизатора с рабочими состояниями 220;
выбора первоначальной настройки ориентации руля высоты в качестве настройки 315b ориентации руля высоты и первоначальной настройки ориентации стабилизатора в качестве настройки 315а ориентации стабилизатора.
С8. Самолет 100 по параграфу С7, в котором первоначальная настройка ориентации руля высоты является предельным значением 602а для взлета из поддиапазона 602 руля высоты при взлете, при этом поддиапазон 602 руля высоты при взлете является составляющей полного рабочего диапазона 600 руля высоты, полный рабочий диапазон 600 руля высоты дополнительно содержит один или более допустимых пределов 604 управления полетом, а поддиапазон 602 руля высоты при взлете задан на основании пространственных положений руля 120 высоты для управления полетом.
С9. Самолет 100 по параграфу С7, в котором первоначальная настройка ориентации руля высоты является нейтральной ориентацией 601 руля 120 высоты.
С10. Самолет 100 по любому из параграфов С7-С9, в котором контроллер 310 управления балансировкой выполнен с возможностью повторного осуществления выбора первоначальной настройки ориентации руля высоты, определения первоначальной настройки ориентации стабилизатора и сравнения первоначальной настройки ориентации стабилизатора с рабочими состояниями 220 до тех пор, пока первоначальная настройка ориентации стабилизатора не будет находится в пределах заданного порогового значения от среднего рабочих состояний 220.
С11. Самолет 100 по любому из параграфов С7-С9, в котором контроллер 310 управления балансировкой выполнен с возможностью повторного осуществления выбора первоначальной настройки ориентации руля высоты, определения первоначальной настройки ориентации стабилизатора и сравнения первоначальной настройки ориентации стабилизатора с рабочими состояниями 220 до тех пор, пока первоначальная настройка ориентации руля высоты не будет находится в пределах заданного порогового значения от нейтральной ориентации 601, а первоначальная настройка ориентации стабилизатора не будет находится в пределах рабочих состояний 220.
С12. Самолет 100 по любому из параграфов С1-С11, в котором контроллер 310 управления балансировкой выполнен с возможностью уменьшения отклонения при управлении рулем высоты в системе 350 управления полетом при условии, что настройка 315b ориентации руля высоты отличается от нейтральной ориентации 601.
С13. Самолет 100 по любому из параграфов С1-С12, в котором система 350 управления полетом представляет собой электродистанционную систему управления.
С14. Самолет 100 по любому из параграфов С1-С13, дополнительно содержащий базу данных 311, при этом контроллер 310 управления балансировкой выполнен с возможностью определения настроек 315 балансировки при взлете с использованием базы данных 311.
С15. Самолет 100 по любому из параграфов С1-С14, дополнительно содержащий один или более датчиков 380 для передачи по меньшей мере одного из параметров 105 взлета самолета в контроллер 310 управления балансировкой.
С16. Самолет 100 по любому из параграфов С1-С15, в котором один или более датчиков самолета 100 содержат датчик веса, установленный в шасси самолета 100.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ИНДИКАЦИИ БАЛАНСИРОВКИ ЛЕТАТЕЛЬНОГО АППАРАТА НА ВЗЛЕТЕ | 2018 |
|
RU2773992C2 |
| САМОЛЕТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 1999 |
|
RU2162809C2 |
| Беспилотный летательный аппарат вертикального взлета и посадки | 2017 |
|
RU2716391C2 |
| ПЛАНЕР ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2645522C1 |
| СПОСОБ КОМПЛЕКСНОГО ПОВЫШЕНИЯ АЭРОДИНАМИЧЕСКИХ И ТРАНСПОРТНЫХ ХАРАКТЕРИСТИК, ЭКРАНОПЛАН ДЛЯ ОСУЩЕСТВЛЕНИЯ УКАЗАННОГО СПОСОБА (ВАРИАНТЫ) И СПОСОБ ВЫПОЛНЕНИЯ ПОЛЕТА | 2010 |
|
RU2539443C2 |
| ПАССАЖИРСКИЙ САМОЛЕТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2023 |
|
RU2818261C1 |
| САМОЛЁТ ВЕРТИКАЛЬНОГО ВЗЛЁТА И ПОСАДКИ | 2018 |
|
RU2742496C2 |
| САМОЛЕТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2008 |
|
RU2430859C2 |
| САМОЛЕТ ГОРИЗОНТАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2006 |
|
RU2350510C2 |
| СВЕРХЗВУКОВОЙ АДМИНИСТРАТИВНЫЙ САМОЛЕТ | 2015 |
|
RU2602130C1 |
Группа изобретений относится к системе балансировки самолета и способу управления системой балансировки. Для управления системой балансировки определяют настройки балансировки при взлете на основании определенных параметров взлета, в соответствии с которыми регулируют ориентацию стабилизатора самолета и ориентацию руля при взлете. Система содержит контроллер управления балансировкой, механизм задания ориентации стабилизатора, механически соединенный со стабилизатором, механизм ориентирования руля высоты, механически соединенный с рулем высоты. Обеспечивается повышение точности управления и уменьшение полного перемещения стабилизатора. 2 н. и 13 з.п. ф-лы, 13 ил.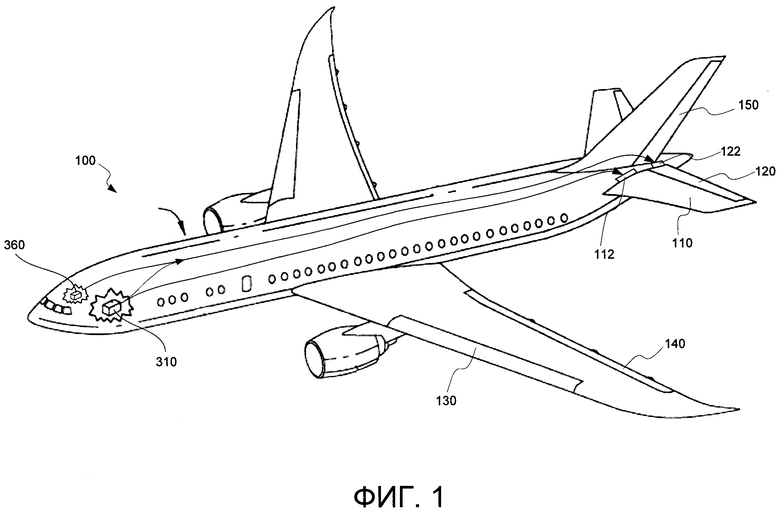
1. Способ (500) управления системой (300) балансировки самолета (100), включающий:
- определение настроек (315) балансировки при взлете на основании параметров (105) взлета самолета,
при этом настройки (315) балансировки при взлете содержат настройку (315а) ориентации стабилизатора и настройку (315b) ориентации руля высоты, а
параметры (105) взлета самолета содержат по меньшей мере один параметр, выбранный из веса самолета, центра тяжести самолета, настройки положения закрылков при взлете или настройки тяги при взлете;
- регулирование ориентации стабилизатора (110) самолета (100) с использованием механизма (112) самолета (100) для задания ориентации стабилизатора в соответствии с настройкой (315а) ориентации стабилизатора из настроек (315) балансировки при взлете; и
- регулирование ориентации руля (120) высоты самолета (100) с использованием механизма (122) ориентирования руля высоты самолета (100) в соответствии с настройкой (315b) ориентации руля высоты из настроек (315) балансировки при взлете.
2. Способ по п. 1, согласно которому настройка (315b) ориентации руля высоты из настроек (315) балансировки при взлете отличается от нейтральной ориентации (601) руля (120) высоты.
3. Способ по п. 1 или 2, согласно которому настройка (315а) ориентации стабилизатора и настройка (315b) ориентации руля высоты из настроек (315) балансировки при взлете зависят друг от друга.
4. Способ по п. 3, согласно которому определение настроек (315) балансировки при взлете включает определение настройки (315а) ориентации стабилизатора на основании настройки (315b) ориентации руля высоты.
5. Способ по п. 4, согласно которому определение настройки (315а) ориентации стабилизатора на основании настройки (315b) ориентации руля высоты включает:
выбор первоначальной настройки ориентации руля высоты;
определение первоначальной настройки ориентации стабилизатора на основании первоначальной настройки ориентации руля высоты;
сравнение первоначальной настройки ориентации стабилизатора с рабочими состояниями (220) и
выбор первоначальной настройки ориентации руля высоты в качестве настройки (315b) ориентации руля высоты и первоначальной настройки ориентации стабилизатора в качестве настройки (315а) ориентации стабилизатора.
6. Способ по п. 5, согласно которому
первоначальная настройка ориентации руля высоты является предельным значением (602а) для взлета из поддиапазона (602) руля высоты при взлете, при этом
поддиапазон (602) руля высоты при взлете является составляющей полного рабочего диапазона (600) руля высоты,
полный рабочий диапазон (600) руля высоты дополнительно содержит один или более допустимых пределов (604) управления полетом, а
поддиапазон (602) руля высоты при взлете задан на основании пространственных положений руля (120) высоты для управления полетом.
7. Способ по п. 5, согласно которому первоначальная настройка ориентации руля высоты является нейтральной ориентацией (601) руля (120) высоты.
8. Способ по п. 5, согласно которому выбор первоначальной настройки ориентации руля высоты, определение первоначальной настройки ориентации стабилизатора и сравнение первоначальной настройки ориентации стабилизатора с рабочими состояниями (220) повторяют до тех пор, пока первоначальная настройка ориентации стабилизатора не будет находиться в пределах заданного порогового значения от среднего рабочих состояний (220).
9. Способ по пп. 1-7 или 8, дополнительно включающий в случае, если настройка (315b) ориентации руля высоты отличается от нейтральной ориентации (601), уменьшение отклонения при управлении рулем высоты в системе (350) управления полетом.
10. Способ по пп. 1-8 или 9, согласно которому определение настроек (315) балансировки при взлете осуществляют с использованием базы данных (311).
11. Способ по пп. 1-9 или 10, дополнительно включающий инициирование взлета самолета (100), при этом ориентация стабилизатора (110) соответствует настройке (315а) ориентации стабилизатора, а ориентация руля высоты (120) соответствует настройке (315b) ориентации руля высоты.
12. Способ по пп. 1-10 или 11, дополнительно включающий прием параметров (105) взлета самолета.
13. Система (300) балансировки самолета (100), содержащая:
- контроллер (310) управления балансировкой, выполненный с возможностью определения настроек (315) балансировки при взлете самолета (100) на основании параметров (105) взлета самолета,
при этом настройки (315) балансировки при взлете содержат настройку (315а) ориентации стабилизатора и настройку (315b) ориентации руля высоты, а
параметры (105) взлета самолета содержат по меньшей мере один параметр, выбранный из веса самолета, центра тяжести самолета, настройки положения закрылков самолета или настройки тяги при взлете самолета;
- механизм (112) задания ориентации стабилизатора, выполненный с возможностью управления на основании настройки (315а) ориентации стабилизатора;
- стабилизатор (110), механически соединенный с механизмом задания ориентации стабилизатора (112),
при этом механизм (112) задания ориентации стабилизатора выполнен с возможностью изменения ориентации стабилизатора (110) на основании настройки (315а) ориентации стабилизатора; а система балансировки также содержит:
механизм (122) ориентирования руля высоты, выполненный с возможностью управления на основании настройки (315b) ориентации руля высоты; и
руль (120) высоты, механически соединенный с механизмом (122) ориентирования руля высоты,
при этом механизм (122) ориентирования руля высоты выполнен с возможностью изменения ориентации руля (120) высоты на основании настройки (315b) ориентации руля высоты.
14. Система (300) балансировки по п. 13, в которой контроллер (310) управления балансировкой соединен с возможностью обмена данными по меньшей мере с одним из механизма задания ориентации стабилизатора (112) и механизма (122) ориентирования руля высоты.
15. Система (300) балансировки по п. 13 или 14, в которой контроллер (310) управления балансировкой выполнен с возможностью приема настройки (315b) ориентации руля высоты от контроллера (360) управления полетом и с возможностью определения настройки (315а) ориентации стабилизатора на основании настройки (315b) ориентации руля высоты, принятой от контроллера (360) управления полетом.
| СИСТЕМА ПОВЫШЕНИЯ УПРАВЛЯЕМОСТИ ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2520850C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ВЫСОТОЙ ПОЛЕТА БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2290346C1 |
| US 8996205 B2, 31.03.2015 | |||
| US 8014910 B2, 06.09.2011 | |||
| В.А | |||
| БОДНЕР "СИСТЕМЫ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ" М | |||
| Приспособление для склейки фанер в стыках | 1924 |
|
SU1973A1 |

