ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
Нет.
ЗАЯВЛЕНИЕ О ФИНАНСИРОВАНИИ НИОКР ИЗ ФЕДЕРАЛЬНОГО БЮДЖЕТА
Нет.
Область техники
Примерная неограничивающая технология относится к показаниям в кабине летательного аппарата, а конкретнее, к автоматическим системам, способам и запоминающим устройствам, дающим возможность расчета и индикации корректировки балансировки летательного аппарата на взлете.
УРОВЕНЬ ТЕХНИКИ
Летательный аппарат обычно имеет органы управления, которые дают пилоту возможность «сбалансировать» тангаж, то есть, положение «кабрирования»/«пикирования» летательного аппарата. «Кабрирование» как правило означает, что летательный аппарат набирает высоту, тогда как «пикирование» как правило означает, что летательный аппарат теряет высоту. Типично желательно сохранять тангаж летательного аппарата в нейтральном положении в воздухе, когда элементы управления находятся в нейтральном положении.
Один из способов сделать это состоит в том, чтобы «сбалансировать» тангаж на основании текущей скорости полета, силы тяги и других факторов, с тем чтобы нейтральное положение ручки управления или другого источника входного сигнала обеспечивало горизонтальный полет без кабрирующего или пикирующего момента. Балансировка нейтрализует силу, требуемую для удерживания поверхностей управления в конкретном положении. Надлежащим образом сбалансированный летательный аппарат понижает давление при управлении рулем высоты или силу, которую пилот должен прикладывать для удержания самолета в горизонтальном полете. Использование собственной устойчивости самолета в комбинации с продольной балансировкой может давать возможность гораздо более плавного управления полетом и пониженной рабочей нагрузки на пилота.
Большинство летательных аппаратов имеют управление продольной балансировкой, которое устанавливает «кабрирование», «пикирование» или нейтральный тангаж, когда ручка управления (которая типично управляет рулем высоты и/или другой поверхностью управления тангажом) находится в нейтральном положении. В небольшом летательном аппарате, продольная балансировка обычно достигается посредством подвижных триммеров на поверхностях управления руля высоты, которые управляются штурвалом управления балансировкой или другим элементом управления балансировкой в кабине летчиков. Например, поворачивание триммера вниз создает восходящую подъемную силу на триммере, которая поворачивает руль высоты вверх на требуемый балансировочный угол. При надлежащей настройке триммера, руль высоты перемещается на требуемый балансировочный угол при желательной скорости, и усилие на рычаг управления, требуемое для поддержания желательного положения по тангажу, становится равным нулю. В больших летательных аппаратах, продольная балансировка часто выполняется процессором, приводящим в действие электродвигатель для управления углом/положением горизонтального стабилизатора, к которому прикреплен руль высоты (смотрите фиг. 1).
Несмотря на то, что продольная балансировка может настраиваться после того, как летательный аппарат находится в движении, она часто устанавливается при взлете для создания смещения кабрирования/пикирования, чтобы учитывать то, где расположен центр тяжести (ЦТ) летательного аппарата. В этом контексте «ЦТ» означает среднее расположение центра тяжести летательного аппарата (то есть, центра масс самолета в целом) - которое имеет конкретное известное расположение для пустого самолета, но может меняться в зависимости от величины загрузки топливом, пассажирами/грузом и других факторов.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Нижеследующее подробное описание примерных неограничивающих иллюстративных вариантов осуществления должно читаться совместно с чертежами, на которых:
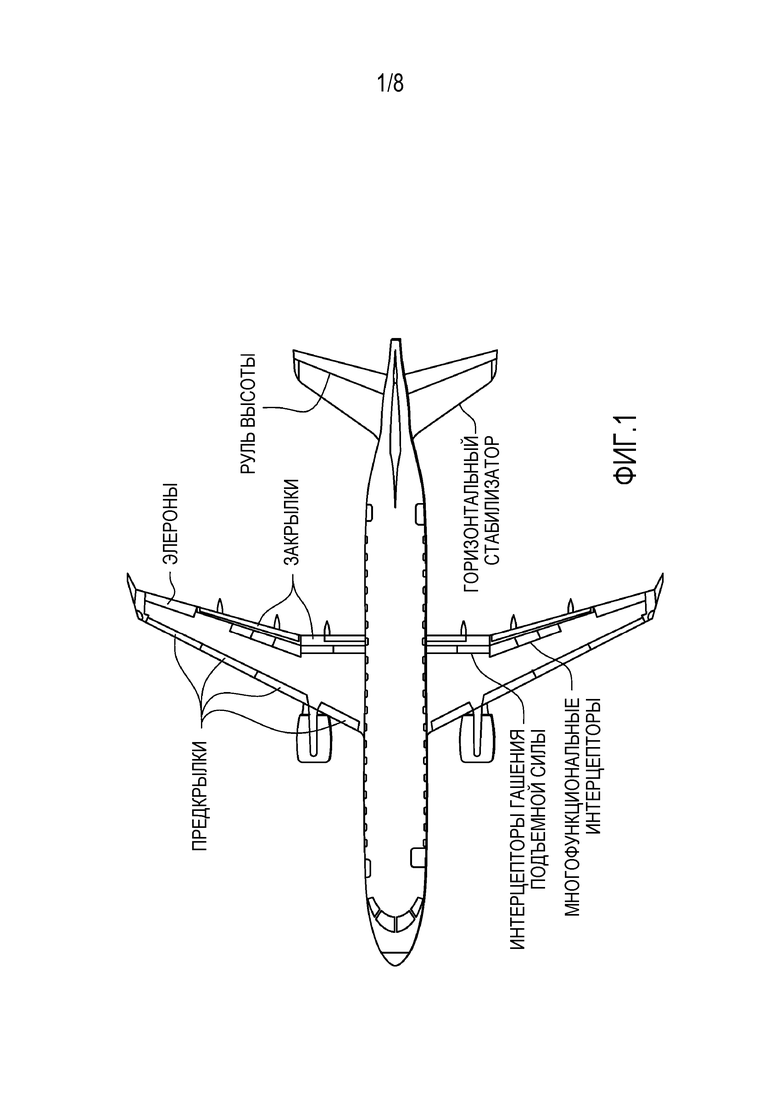
фиг. 1 показывает поверхности управления примерного летательного аппарата;
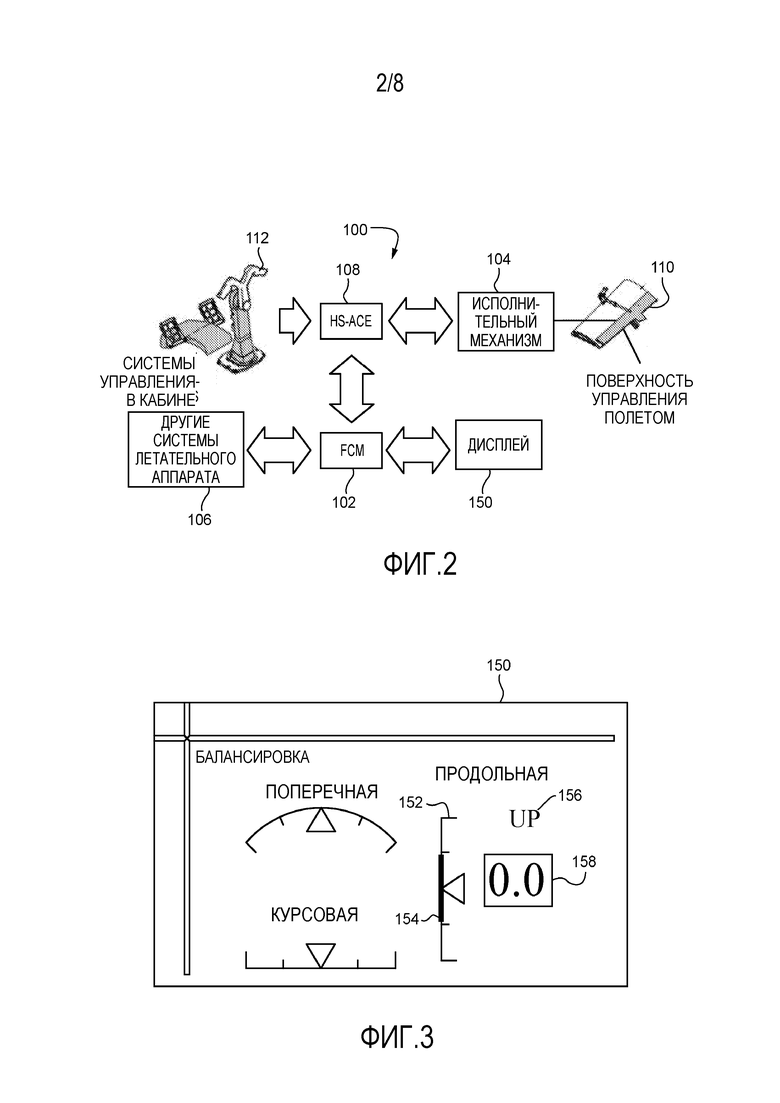
фиг. 2 показывает примерную неограничивающую систему управления горизонтальным стабилизатором;
фиг. 3 показывает примерный неограничивающий электронный дисплей балансировки летательного аппарата;
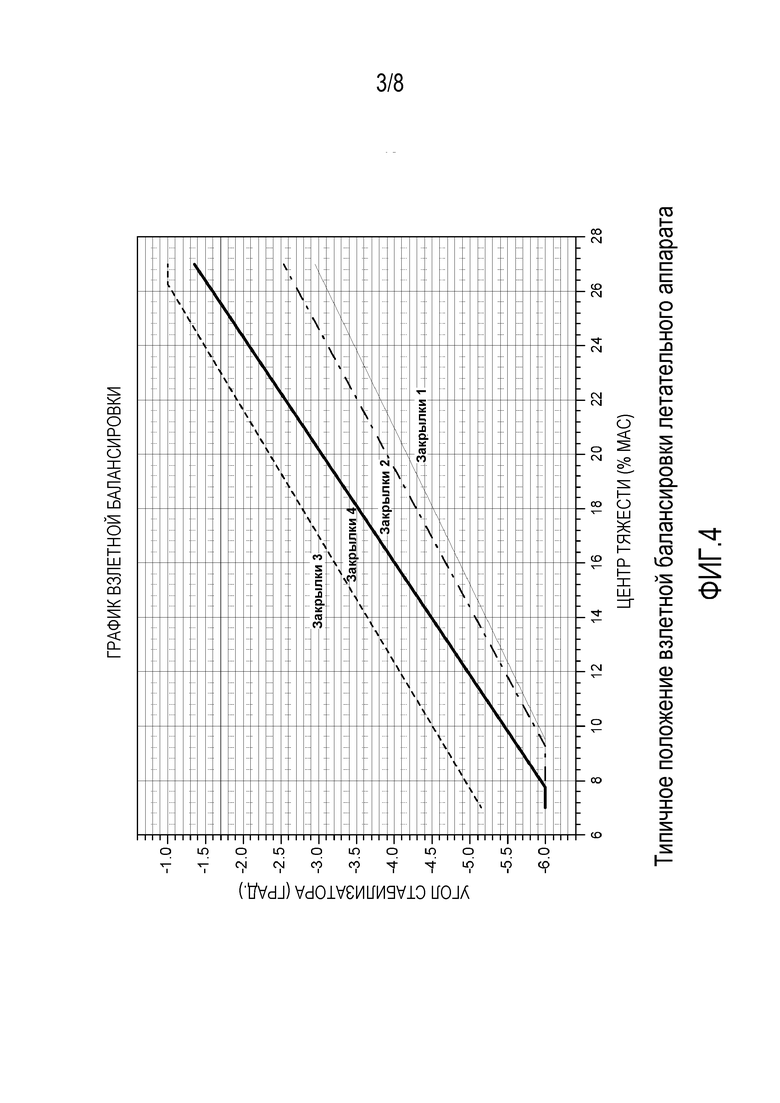
фиг. 4 показывает типичное управление положением балансировки летательного аппарата на взлете;
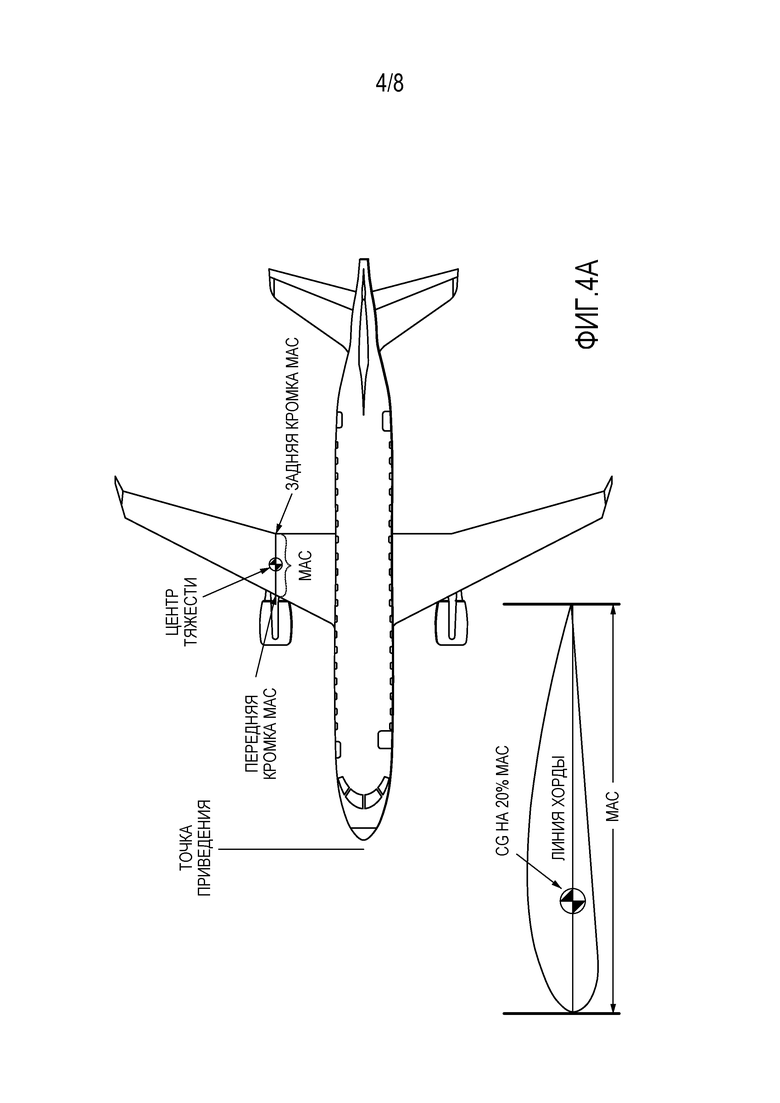
фиг. 4A показывает индикацию центра тяжести (ЦТ) в процентах средней аэродинамической хорды;
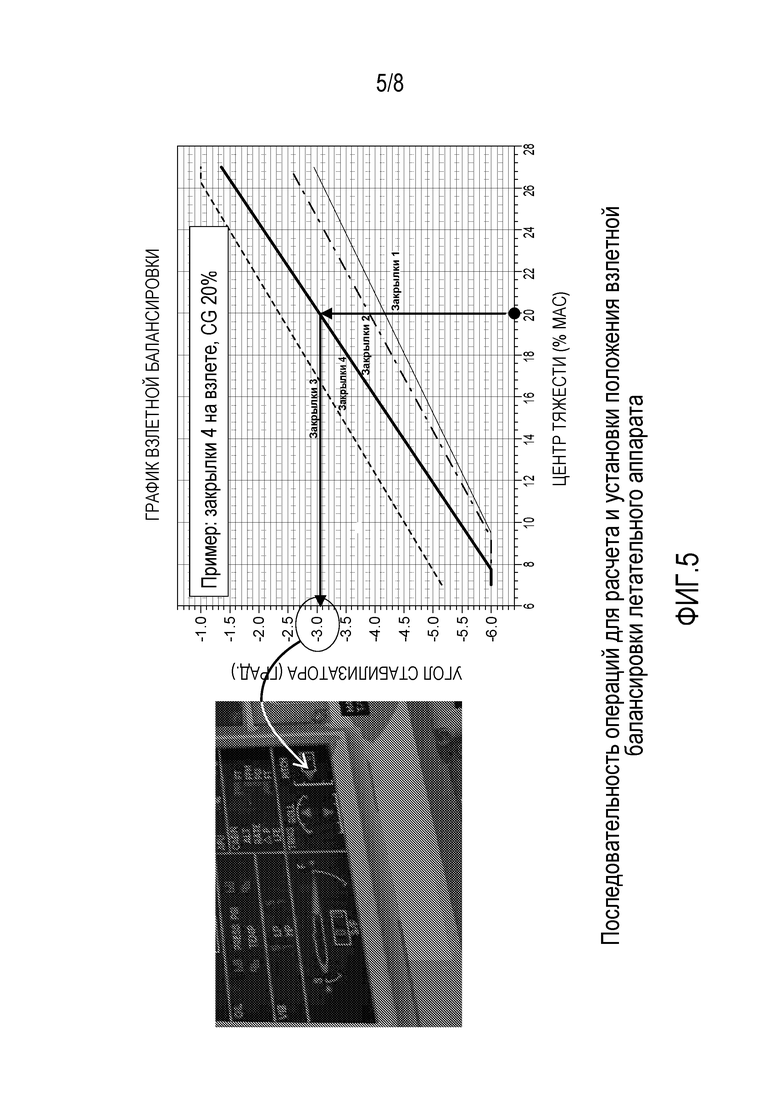
фиг. 5 показывает примерный неограничивающий процесс для расчета и установки положения балансировки летательного аппарата на взлете;
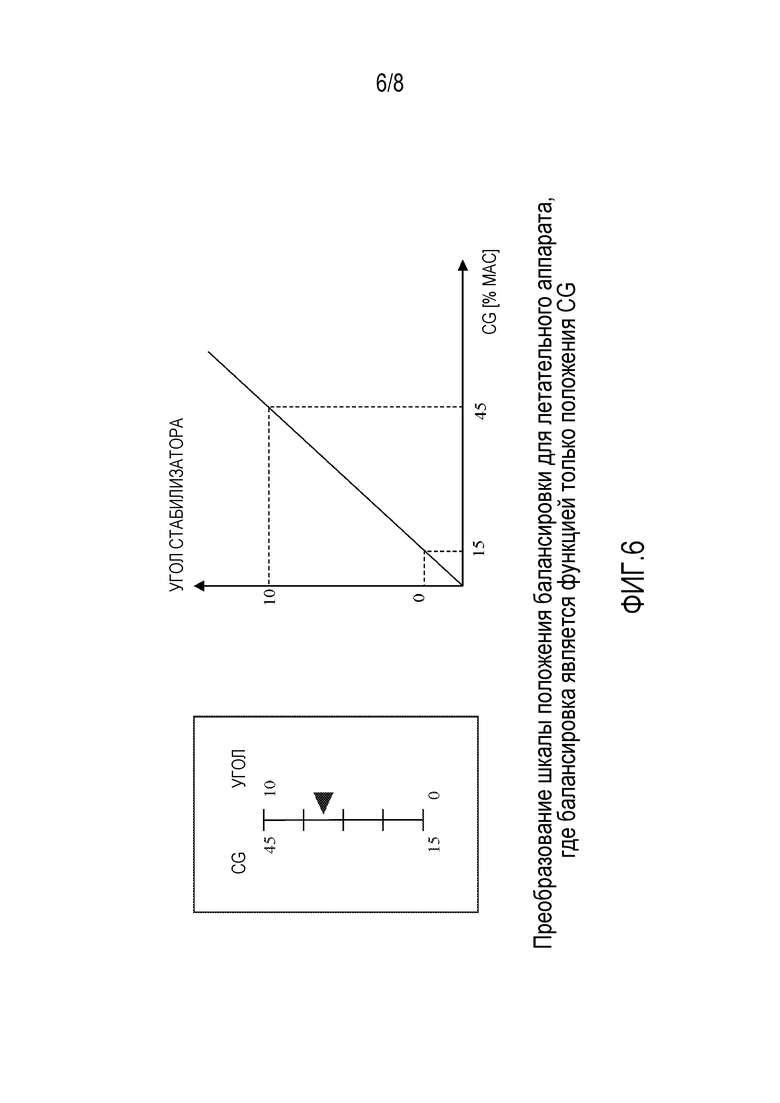
фиг. 6 показывает преобразование шкалы положения балансировки для летательных аппаратов, где положение балансировки является функцией только положения ЦТ;
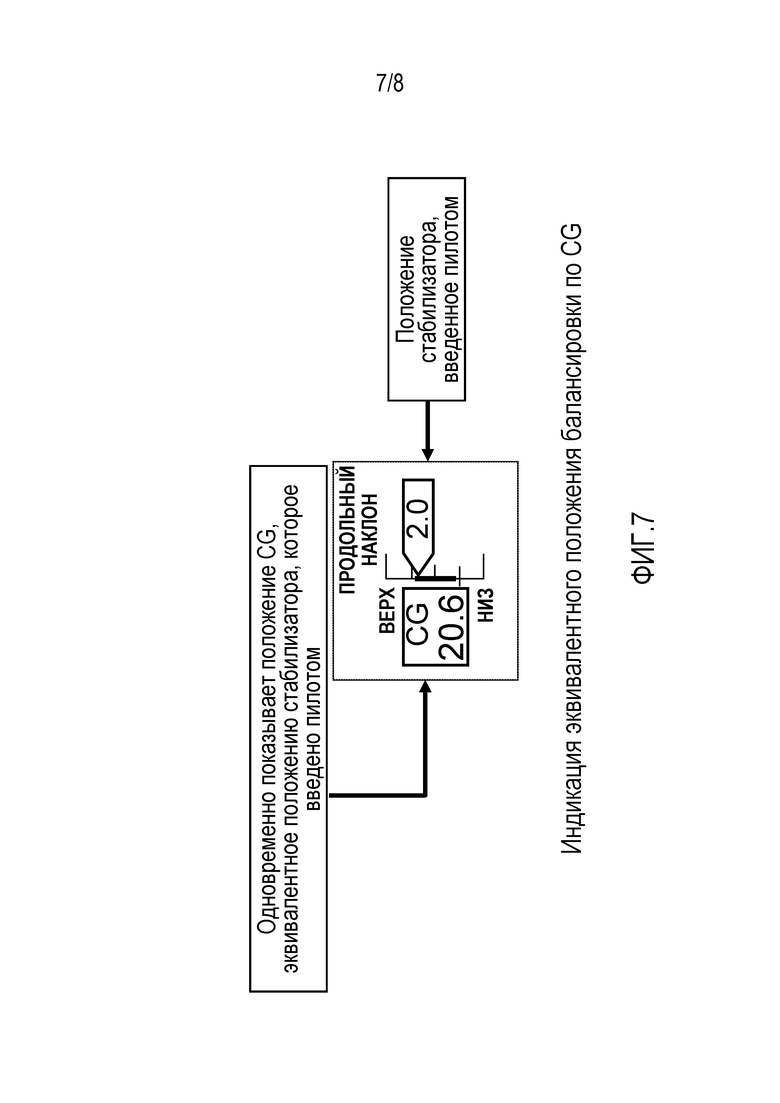
фиг. 7 показывает примерную неограничивающую индикацию эквивалентного положения балансировки по ЦТ; и
фиг. 8 показывает процессы предшествующего уровня техники и нового решения.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Примерная неограничивающая технология в материалах настоящей заявки представляет собой функциональные возможности, которые упрощают процесс установки положения балансировки на взлете для летательного аппарата с зависящим от многих параметров положением балансировки на взлете(как правило больших летательных аппаратов), предоставляя пилоту возможность конфигурировать балансировку на взлете некоторым образом, который легче предшествующей процедуры и, к тому же, снижает вероятность ошибок, обусловленных просчетами.
Примерная неограничивающая технология применяется к летательному аппарату с зависящей от многих параметров балансировкой на взлете и в тех случаях, когда все параметры, используемые при определении балансировки на взлете (за исключением положения центра тяжести) имеются в распоряжении у блока обработки, такого как модуль управления полетом, для выполнения необходимых расчетов.
Примерная автоматическая система продольной балансировки электронного управления полетом самолета
В некоторых летательных аппаратах, продольная балансировка может вводиться вручную, а затем настраиваться посредством переключателей, установленных на штурвальной колонке, которые приводят в действие приводной двигатель балансировки. Фиг. 2 показывает примерную бортовую систему 100 управления в кабине летчиков летательного аппарата, включающую в себя по меньшей мере один процессор 102, который запрограммирован и выполнен с возможностью вырабатывать сигнал управления двигателем положения горизонтального стабилизатора для установления угла/положения балансировки горизонтального стабилизатора 110. В такой примерной системе 100, модуль 102 управления полетом (FCM) принимает входные данные из систем 112 управления в кабине летчиков (в том числе, например, ручки управления или другого источника входного сигнала) и других систем 106 летательного аппарата, такие как выходные сигналы с датчиков, в том числе, индикаторную земную скорость и хранимые значения, такие как коэффициент загрузки, и выдает выходные данные в систему электронного управления полетом самолета (FBW), в том числе в HS-ACE 108 (электронику управления приводом горизонтального стабилизатора). FCM 102 выполняет команды управляющей программы, хранимые в некратковременной памяти, которые формируют, в ответ на такие входные данные, электронные сигналы управления, которые FCM выдает через HS-ACE 108 на исполнительный механизм 104, такой как электродвигатель и/или гидравлический исполнительный механизм. В этом конкретном примере, системы 112 управления в кабине летчиков также могут выдавать входные данные непосредственно в HS-ACE 104. Когда действует, исполнительный механизм 104 изменяет положение поверхности 110 управления полетом по тангажу горизонтального стабилизатора на основании сигналов управления, которые он принимает из FCM 102 через HS-ACE 108. По мере того, как входные данные меняются, FCM 102 использует закон управления для обновления сигналов управления, что побуждает исполнительный механизм 104 изменять положение поверхности 110 управления полетом, тем самым, адаптируя тангаж летательного аппарата под изменяющиеся входные данные, в том числе, входные сигналы 112 управления пилота и другие входные данные, относящиеся к условиям полета летательного аппарата, текущему состоянию летательного аппарата (в том числе, величине и распределению веса), и тому подобному.
Фиг. 3 показывает типичные примерные показания балансировки на примерном неограничивающем электронном дисплее 150 (функционально соединенном с FCM 102), используемым для информирования пилота о текущем состоянии балансировки летательного аппарата. Положения балансировки по каждой оси показываются указательными стрелками. Показаны три балансировки (по тангажу, по рысканию, по крену), по одной для каждой степени свободы летательного аппарата. Индикация продольной балансировки (балансировки по тангажу) (справа) показывает величину (угол) продольной балансировки, а также направление (вверх или вниз) текущего тангажа относительно заданной балансировки. В частности, интервальные метки 152 на индикации продольной балансировки могут указывать последовательность углов продольной балансировки, например, таких как 4°, 0,25°, -3,5°, -7,25° и -11°. Положение стрелочного индикатора относительно этих интервальных меток указывает продольную балансировку. Цифровая числовая индикация 158 может указывать угловое положение горизонтального стабилизатора в градусах, причем индикатор 156 «Верх» и «Низ» указывает тангаж вверх или тангаж вниз от (выше или ниже) показания согласно установке балансировки.
Желательно устанавливать надлежащую продольную балансировку перед взлетом, чтобы делать элементы управления более легкими для манипулирования во время взлета. С этой целью, как показано на фиг. 3, «зеленая» полоса 154, например, продолжающаяся от 2° до -4°, может отображаться во время взлета, чтобы указывать допустимый диапазон положений продольной балансировки для взлета. Глядя на положение стрелки относительно полосы 154, пилот может узнавать, что настраиваемая продольная балансировка находится вне правильного диапазона для взлета. Но эта индикация не говорит пилоту, какой должна быть правильная продольная балансировка - только какой она не должна быть.
Использование FCM 102 многомерной таблицы для установки продольной балансировки на взлете
В прошлом, применительно к некоторым летательным аппаратам, настройка продольной балансировки на взлете (например, угла горизонтального стабилизатора) выполнялась с использованием многомерной таблицы, которая является функцией нескольких параметров, таких как закрылки, предкрылки, вес, ЦТ, и т. д. Эта дополнительная сложность обычно реализовывалась для того, чтобы добиваться хорошего баланса между факторами, такими как летные качества, пилотирование и условия отказа. Значение продольной балансировки на взлете может рассчитываться посредством FCM 102 на борту летательного аппарата - или зачастую другими компьютерами, внешними по отношению к летательному аппарату, и выдаваться пилоту для ввода в FCM перед взлетом.
Фиг. 4 представляет собой примерную справочную функцию (которая может храниться в таблице), где балансировка на взлете (угол горизонтального стабилизатора в градусах) определяется или рассчитывается в качестве функции положения закрылков и положения ЦТ (% САХ или средней аэродинамической хорды).
Положение стабилизатора определяется в качестве функции центра тяжести, но также определяется положением закрылков на крыльях (смотрите фиг. 1). Разные положения закрылков формируют разные величины подъемной силы и, поэтому, могут изменять положение по тангажу летательного аппарата. В частности, выдвигание закрылков оказывает четко выраженное влияние на поведение самолета по тангажу. Повышенный изгиб из-за отклонения закрылков создает подъемную силу главным образом на задней части крыла, создавая силу пикирования. Точное влияние каждого выдвигания закрылков на летательный аппарат зависит от конкретного летательного аппарата.
Например, фиг. 4 показывает, что положение «Закрылки 4» соотносится с более отрицательным положением горизонтального стабилизатора для взлета (в градусах) по сравнению с положением «Закрылки 3», но менее отрицательным положением горизонтального стабилизатора для взлета по сравнению с положением «Закрылки 2». График также показывает, что зависимость положения горизонтального стабилизатора от центра тяжести для взлета в целом линейна, но конкретная линейная функция зависит от положения закрылков.
Отметим, что на фиг. 4 центр тяжести (ЦТ) определен в виде «% САХ». В качестве дополнительного пояснения, центр тяжести («ЦТ») в этом контексте типично определяется относительно ширины крыла - которая известна как «хорда». Ширина крыла, которое является скошенным и/или стреловидным, отличается по всей его длине. Смотрите фиг. 4A. Как иллюстрирует фиг. 4A, ширина является наибольшей там, где крыло встречается с фюзеляжем, и постепенно убывает в направлении конца. Что касается аэродинамики крыла, средняя длина хорды на этих скошенных стреловидных крыльях известна как средняя аэродинамичекая хорда («САХ»). Дополнительные сведения на www.flight-mechanic.com/mean- aerodynamic-chord.
В таких самолетах, ЦТ распознается в качестве находящегося в месте, которое имеет значение определенного процента средней аэродинамической хорды (% САХ). Например, представим себе, что САХ на конкретном самолете имеет значение 100", а ЦТ попадает на 20" сзади от передней кромки САХ. Это означает, что он попадает на одну пятую по ходу назад или на 20% САХ. Смотрите фиг. 4A.
Что касается летательного аппарата с балансировкой на взлете, которая зависит от многочисленных параметров, для того чтобы сконфигурировать выполнение перед взлетом, необходимо интерполировать таблицу хранимых значений, как показано на фиг. 4, с использованием параметров взлета для получения положения балансировки на взлете. Примерный такой процесс для определения и установки продольной балансировки на взлете представлен на фиг. 5. Угол горизонтального стабилизатора в градусах рассчитывается по меньшей мере одним процессором в FCM 102 на основании центра тяжести самолета (который, например, основан на конфигурации самолета, а также количестве пассажиров, количестве топлива, количестве груза, и т. д.), введенного в FCM. Этот угол горизонтального стабилизатора в градусах отображается в виде числового значения на отображении продольной балансировки по фиг. 3 (которое показано на левом выносном электронном дисплее по фиг. 5 в нижнем правом углу дисплея). Например, если закрылки находятся в положении 4, а ЦТ имеет значение 20% САХ, FCM 102 определяет и отображает угол горизонтального стабилизатора в -3,0° на электронном дисплее, и использует это значение для установки углового положения горизонтального стабилизатора.
Применительно к некоторым небольшим летательным аппаратам, где положение балансировки на взлете может быть функцией только положения ЦТ (то есть, не нужно учитывать положение закрылков), коррекция положения балансировки на взлете может быть упрощена с использованием простого преобразования шкалы, как проиллюстрировано на фиг. 6. В этом случае, угол стабилизатора определяется в качестве функции ЦТ без необходимости осуществлять расчет на основании положения закрылка.
В гражданской авиации, эти расчеты типично понятны для пилота. Пилоту нужно только сконфигурировать летательный аппарат рассчитанным положением балансировки на взлете, которое выдается ему или ей из FCM 102 или диспетчерским персоналом. В таких ситуациях, пилот не рассчитывает и не определяет продольную балансировку, и значит, всего лишь вводит значение, которое было выдано ему или ей, не имея в распоряжении быстрой возможности пересчитать или перепроверить значение. Даже когда военный летчик рассчитывает свою собственную продольную балансировку, методология предшествующего уровня техники как правило не выполняет никакой промежуточной проверки работоспособности введенных значений за исключением контроля, который проверяет, были ли превышены предельные значения «зеленой полосы» (например, от 2° до -4°) (предельные условия).
В прошлом иногда наблюдались некоторые затруднения:
• Положение балансировки на взлете может быть рассчитано неправильно
• Распознавание ошибок управления только применительно к предельным условиям (вне предельных значений зеленой полосы)
• Низкая быстрота реакции (важная главным образом или исключительно для военных операций). В военных операциях, бывают ситуации, где пилот (из тактических соображений) ответственен за расчет положения балансировки, которое должно использоваться.
Расчет обратной функции для проверки положения балансировки
Положение балансировки на взлете очень часто является функцией f положения ЦТ и других параметров, в том числе, но не ограничиваясь, положения закрылков. Например:
Балансировка на взлете =f(закрылки, предкрылки, ЦТ). (Уравнение 1)
В уравнении, приведенном выше, положение балансировки на взлете является функцией трех факторов: (a) положения закрылков, (b) положения предкрылков и (c) центра тяжести.
Примерная неограничивающая технология в материалах настоящей заявки рассчитывает обратную функцию f', для того чтобы получать эквивалентное положение балансировочного ЦТ, решая вышеприведенное уравнение относительно ЦТ (где f' - обратная функция от):
балансировка по ЦТ=f'(балансировка TO, закрылки, предкрылки). (Уравнение 2)
Другими словами, в этом примере, балансировка по центру тяжести рассчитывается в качестве функции положения балансировки на взлете («балансировки TO»), положения закрылков и положения предкрылков.
FCM 102 рассчитывает эту балансировку по ЦТ и указывает рассчитанное значение положения балансировки по ЦТ (CGTRIM) на дисплее 150 одновременно с тем, как пилот настраивает положение балансировки, как показано на фиг. 7. В частности, фиг. 7 показывает новую отображаемую индикацию («Балансировка по ЦТ»), которая одновременно указывает положение ЦТ, которое эквивалентно положению горизонтального стабилизатора, которое введено пилотом. Таким образом, на фиг. 7, положение стабилизатора «2,0» является углом горизонтального стабилизатора, введенным пилотом. Между тем, FCM 102 использует это введенное положение стабилизатора для автоматического расчета эквивалентного положения ЦТ «балансировки ЦТ» в «20,6» % САХ, которое он отображает на том же самом дисплее. Отображаемое положение «балансировки по ЦТ» меняется в реальном времени по мере того, как пилот вводит разные положения стабилизаторов, или разные положения стабилизаторов определяются иным образом. Пилот может сравнивать указываемое положение «балансировки по ЦТ» с фактическим известным положением ЦТ в качестве обратной или перекрестной проверки, чтобы удостовериться, что введенное положение стабилизатора является правильным применительно к ЦТ летательного аппарата с его текущей загрузкой.
Краткое изложение прошлой и новой технологий
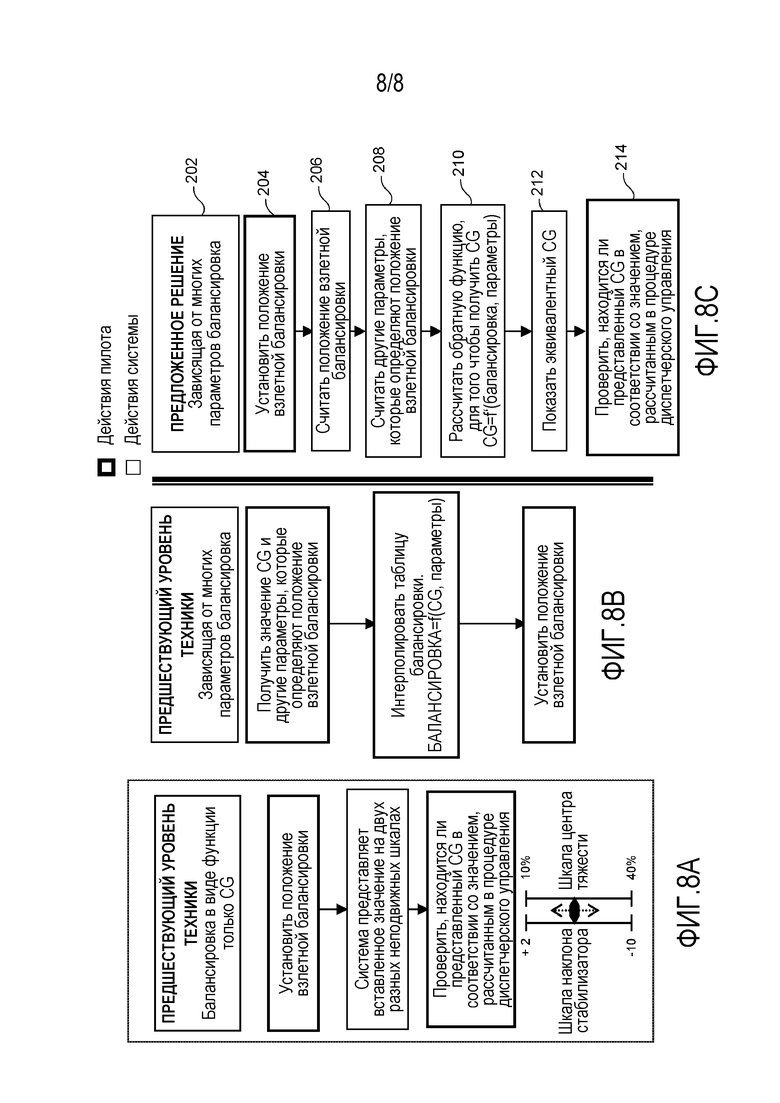
В целях иллюстрации и без умысла ограничения, фиг. 8A, 8B и 8C показывают два способа предшествующего уровня техники и примерный неограничивающий вариант осуществления в материалах настоящей заявки. Можно видеть, что, на фиг. 8A, процесс предшествующего уровня техники, показанный слева, в которой балансировка является функцией только ЦТ, одно определенное положение балансировки отображается на двух разных неподвижных шкалах (например, шкале наклона стабилизатора от -10 до +2 и шкале центра тяжести от 40% до 10%). Пилот всего лишь сверяет отображаемый центр тяжести со значением, рассчитанным в процедуре диспетчерского управления.
На фиг. 8B, процесс предшествующего уровня техники, показанный в центре, таблица балансировки с многими переменными интерполируется на основании ЦТ для получения положения балансировки на взлете, которое отображается.
Нет легкого пути для проверки рассчитанного положения балансировки на взлете, чтобы удостовериться, что она имеет смысл (единственная проверка состоит в том, чтобы удостовериться, что оно находится в пределах «зеленой» полосы, обсужденной выше).
В новом неограничивающим примерном процессе 202, показанном на фиг. 8C (справа), пилот устанавливает положение балансировки на взлете (блок 204), как раз как для небольшого летательного аппарата, где продольная балансировка является функцией только ЦТ, - и в отличие от большего летательного аппарата, где FCM 102 получает значение ЦТ и другие параметры, которые определяют положение балансировки на взлете. В настоящем варианте осуществления, FCM 102 выполняет команды для считывания положения балансировки на взлете (блок 206), которую установил пилот, а затем выполняет дополнительные команды, которые считывают другие параметры (например, положения закрылков и предкрылков и положение горизонтального стабилизатора), которые определяют положение балансировки на взлете (блок 208). FCM 102 затем выполняет команды для автоматического расчета обратной функции, обсужденной выше (смотрите уравнение 2), для того чтобы получить эквивалентное значение балансировки по ЦТ (блок 210). FCM 102 затем отображает рассчитанное значение балансировки по ЦТ, которое эквивалентно положению балансировки на взлете, которое установил пилот (блок 212).
Как отмечено выше, это отображаемое значение «балансировки по ЦТ» не является значением балансировки, но скорее является эквивалентным положением ЦТ (например, % САХ), которое рассчитано обратным счетом из введенного значения продольной балансировки. FCM 102 рассчитывает это эквивалентное положение ЦТ, например, на основании таблицы балансировки на взлете, которая соотносит положение балансировки на взлете с по меньшей мере центром тяжести летательного аппарата; где FCM использует фактическое введенное положение продольной балансировки летательного аппарата и другие фактически установленные конфигурационные параметры для интерполяции справочной таблицы балансировки (смотрите фиг. 4), для того чтобы рассчитать центр тяжести, который соотносится с введенным значением балансировки. FCM 102 выполняет этот расчет, например, на основании таблицы балансировки на взлете или другие расчеты, которые соотносят положение балансировки на взлете с положением центра тяжести, закрылков и предкрылков летательного аппарата; где фактически установленные положения продольной балансировки, закрылков и предкрылков летательного аппарата используются для интерполяции справочной таблицы балансировки или других расчетов, для того чтобы определять центр тяжести, который соотносится с введенной продольной балансировкой.
Пилот затем может считывать отображенное значение «балансировки по ЦТ» и использовать его для проверки, находится ли оно в соответствии со значением положения ЦТ летательного аппарата, рассчитанным в или иным образом предоставленным процедурой диспетчерского управления (блок 214). Пилот может осуществлять поправки (или запрашивать повторный расчет), если отображаемое значение «балансировки по ЦТ» не соответствует тому, что по предположению пилота является фактическим значением ЦТ.
В дополнительном варианте осуществления, FCM 102 может выполнять сравнение между введенным (или отправленным) значением положения ЦТ и рассчитанным обратным счетом значением положения ЦТ и формировать звуковое и/или визуальное предупреждение (и/или корректирующий сигнал), если эти два не согласуются в пределах некоторого предопределенного допуска.
Примерные неограничивающие преимущества
• Минимизирует просчеты
- Устраняет необходимость интерполяции таблицы по нескольким параметрам
• Обеспечивает быстроту реакции в некоторых военных операциях
- Пилот настраивает балансировку на взлете исключительно на основании оценки ЦТ
• Повышает безопасность в случае гражданских операций
- Пилот принимает положение балансировки, сформированное экипажем, который рассчитал отправку летательного аппарата. Пилот настраивает (вводит) это значение балансировки и проверяет, бьется ли указанное соответствующее положение ЦТ с запрограммированным положением ЦТ (перекрестная проверка);
- Если пилот вводит неверную регулировку балансировки (однако, в пределах зеленой полосы для взлета), он будет способен обнаруживать ошибку, проверяя, что эквивалентная балансировка по ЦТ отлична от ЦТ, рассчитанного для отправки. В предшествующем уровне техники, пилот предупреждается, только если ошибки достаточно для превышения предельных значений зеленой полосы (предельных условий);
- Система также дает пилоту возможность выявлять возможные ошибки позиционирования закрылков/предкрылков сразу же, как только, в этой ситуации, эквивалентная балансировка по ЦТ отличается от ЦТ, рассчитанного для отправки.
Таким образом, примерная неограничивающая технология предусматривает способ, который преобразует установку балансировки на взлете, которая была бы функцией нескольких параметров, в установку, которая является функцией только положения ЦТ. Таким образом, можно создать прямое простое отношение эквивалентности между углом стабилизатора и ЦТ. Эквивалентный ЦТ может представляться пилоту в реальном времени.
Несмотря на то, что изобретение было описано в связи с тем, что в настоящее время считается наиболее практичным и предпочтительным вариантом осуществления, должно быть понятно, что изобретение не должно ограничиваться раскрытыми вариантами осуществления, а наоборот, подразумевается покрывающим различные модификации и эквивалентные компоновки, заключенные в пределах сущности и объема прилагаемой формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2012 |
|
RU2493053C1 |
| СПОСОБ УСКОРЕННОГО ВЗЛЕТА САМОЛЕТА | 2006 |
|
RU2359867C1 |
| Многоцелевая сверхтяжелая транспортная технологическая авиационная платформа укороченного взлета и посадки | 2019 |
|
RU2714176C1 |
| БАЛАНСИРОВКА САМОЛЕТА ПРИ ВЗЛЕТЕ С ИСПОЛЬЗОВАНИЕМ СТАБИЛИЗАТОРОВ И РУЛЕЙ ВЫСОТЫ | 2018 |
|
RU2764046C2 |
| СТРАТЕГИЧЕСКАЯ АВИАЦИОННАЯ ТРАНСАРКТИЧЕСКАЯ СИСТЕМА | 2020 |
|
RU2736530C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2007 |
|
RU2364548C2 |
| Способ и устройство для защиты максимальной подъемной силы воздушного судна | 2016 |
|
RU2731194C2 |
| Гидросамолет вертикального взлета и посадки с несущим винтом со сворачивающимися убираемыми лопастями | 2021 |
|
RU2781817C1 |
| САМОЛЕТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ С НЕСУЩИМ ВИНТОМ СО СВОРАЧИВАЮЩИМИСЯ УБИРАЕМЫМИ ЛОПАСТЯМИ | 2019 |
|
RU2727787C1 |
| СПОСОБ КОМПЛЕКСНОГО ПОВЫШЕНИЯ АЭРОДИНАМИЧЕСКИХ И ТРАНСПОРТНЫХ ХАРАКТЕРИСТИК, ЭКРАНОПЛАН ДЛЯ ОСУЩЕСТВЛЕНИЯ УКАЗАННОГО СПОСОБА (ВАРИАНТЫ) И СПОСОБ ВЫПОЛНЕНИЯ ПОЛЕТА | 2010 |
|
RU2539443C2 |
Группа изобретений относится к способу и системе индикации балансировки летательного аппарата на взлете. Для балансировки летательного аппарата принимают балансировку горизонтального стабилизатора, вводимую пилотом, используют ее посредством процессора на борту летательного аппарата для генерирования значения балансировки центра тяжести, которое отображают на дисплее летательного аппарата. Система содержит схему ввода для приема балансировки горизонтального стабилизатора и положение закрылков и/или предкрылков, процессор, электронный дисплей. Обеспечивается повышение безопасности при взлете летательного аппарата. 2 н. и 16 з.п. ф-лы, 11 ил.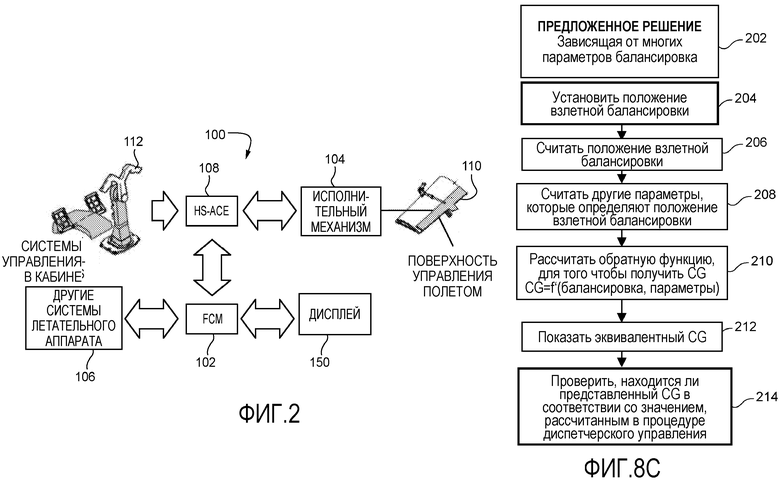
1. Способ индикации балансировки летательного аппарата на взлете, включающий в себя этапы, на которых:
принимают балансировку горизонтального стабилизатора, вводимую пилотом;
посредством по меньшей мере одного процессора на борту летательного аппарата используют принятую балансировку горизонтального стабилизатора, введенную пилотом, для генерирования значения балансировки центра тяжести, которое соответствует принятой балансировке горизонтального стабилизатора, введенной пилотом; и
отображают на электронном дисплее летательного аппарата сгенерированное значение балансировки центра тяжести, которое соответствует принятой балансировке горизонтального стабилизатора, введенной пилотом, для сравнения с отображенным положением центра тяжести летательного аппарата.
2. Способ по п. 1, дополнительно включающий в себя отображение значения балансировки центра тяжести в виде % средней аэродинамической хорды.
3. Способ по п. 1, дополнительно включающий в себя обновление отображения в реальном времени в ответ на введение пилотом изменений балансировки горизонтального стабилизатора перед взлетом.
4. Способ по п. 1, в котором отображение включает в себя отображение на электронном дисплее значения балансировки центра тяжести рядом с индикацией отображенного положения центра тяжести летательного аппарата.
5. Способ по п. 1, дополнительно включающий в себя сравнение по меньшей мере одним процессором значения балансировки центра тяжести с положением центра тяжести летательного аппарата.
6. Способ по п. 1, в котором по меньшей мере один процессор генерирует значение балансировки центра тяжести путем выполнения функции, основанной на балансировке горизонтального стабилизатора, введенной пилотом, и положении закрылков и/или предкрылков перед взлетом.
7. Способ по п. 1, в котором по меньшей мере один процессор определяет значение балансировки центра тяжести на основе таблицы балансировки на взлете, при этом принятая балансировка горизонтального стабилизатора, введенная пилотом для взлета, и другие конфигурационные параметры, которые не требуют движения летательного аппарата, используются для интерполяции таблицы балансировки на взлете для того, чтобы выводить значение балансировки центра тяжести, которое соответствует принятой балансировке горизонтального стабилизатора.
8. Способ по п. 1, в котором по меньшей мере один процессор генерирует значение балансировки центра тяжести на основе таблицы балансировки на взлете, которая соотносит введенную балансировку горизонтального стабилизатора на взлете с положением закрылков и/или предкрылков для интерполяции значений таблицы балансировки на взлете, чтобы таким образом генерировать значение балансировки центра тяжести, которое соответствует принятой балансировке горизонтального стабилизатора.
9. Система индикации балансировки летательного аппарата на взлете, содержащая:
схему ввода, которая принимает (а) балансировку горизонтального стабилизатора, вводимую пилотом, и (в) положение закрылков и/или предкрылков;
по меньшей мере один процессор, оперативно соединенный со схемой ввода, причем упомянутый по меньшей мере один процессор выводит значение балансировки центра тяжести, соответствующее балансировке горизонтального стабилизатора, введенной пилотом, путем выполнения функции, основанной на балансировке горизонтального стабилизатора, введенной пилотом, и положении закрылков и/или предкрылков, при этом выведенное значение балансировки центра тяжести соответствует введенной балансировке горизонтального стабилизатора; и
электронный дисплей, соединенный с упомянутым по меньшей мере одним процессором, причем упомянутый электронный дисплей отображает выведенное значение балансировки центра тяжести, которое соответствует введенной балансировке горизонтального стабилизатора.
10. Система по п. 9, в которой упомянутый по меньшей мере один процессор выводит значение балансировки центра тяжести на основе введенной балансировки горизонтального стабилизатора и положения по меньшей мере одного из закрылков и/или предкрылков перед взлетом.
11. Система по п. 9, в которой дисплей отображает выведенное значение балансировки центра тяжести в виде % средней аэродинамической хорды.
12. Система по п. 9, в которой упомянутый по меньшей мере один процессор обновляет отображаемое значение балансировки центра тяжести в реальном времени в ответ на прием системой изменяющих вводов пилота, определяющих разные балансировки горизонтального стабилизатора перед взлетом.
13. Система по п. 9, в которой дисплей отображает значение балансировки центра тяжести рядом с положением центра тяжести летательного аппарата перед взлетом.
14. Система по п. 9, в которой упомянутый по меньшей мере один процессор выполнен с возможностью сравнивать выведенную балансировку центра тяжести с положением центра тяжести летательного аппарата перед взлетом.
15. Система по п. 9, в которой упомянутый по меньшей мере один процессор выполнен с возможностью учитывать положение закрылков и/или положение предкрылков перед взлетом при выведении значения балансировки центра тяжести.
16. Система по п. 9, в которой упомянутый по меньшей мере один процессор рассчитывает значение балансировки центра тяжести на основании таблицы балансировки на взлете, которая соотносит балансировку горизонтального стабилизатора на взлете с, по меньшей мере, центром тяжести летательного аппарата.
17. Система по п. 9, в которой упомянутый по меньшей мере один процессор рассчитывает значение балансировки центра тяжести на основании таблицы балансировки на взлете, которая соотносит положение балансировки горизонтального стабилизатора на взлете, введенное пилотом, с положением центра тяжести летательного аппарата и положением закрылков и/или предкрылков; причем балансировка горизонтального стабилизатора и положения закрылков и/или предкрылков используются для интерполяции значений таблицы балансировки на взлете для того, чтобы рассчитывать балансировку центра тяжести.
18. Система по п. 9, дополнительно включающая в себя исполнительный механизм, который управляет положением горизонтального стабилизатора в ответ на введенную балансировку горизонтального стабилизатора.
| US 9499254 B2, 22.11.2016 | |||
| Мороженое без сахарозы с низким содержанием жира | 2020 |
|
RU2772732C2 |
| Способ получения спиролактонов | 1979 |
|
SU743582A3 |
| СИСТЕМА ПОВЫШЕНИЯ УПРАВЛЯЕМОСТИ ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2520850C2 |
| SU 678838 A1, 20.04.1996. | |||

