Область техники, к которой относится изобретение
Изобретение относится к точному измерению скорости авиационного двигателя.
В частности, оно относится к учету наличия паразитного шума, который непредсказуемым образом добавляется к требуемому сигналу во время измерения скорости вращения вала двигателя посредством датчика фонического колеса.
Уровень техники
Необходимо точное определение скорости вращения вала авиационного двигателя, поскольку с использованием этой информации можно управлять выключением или регулировкой подачи питания на двигатель, например, если скорость вращения или ускорение превышает предварительно заданное безопасное значение.
Хорошо известно измерение скорости вращения вала с использованием датчика с переменным магнитным сопротивлением, связанным с фоническим колесом. Можно говорить о датчике фонического колеса или о датчике с переменным магнитным сопротивлением. Фоническое колесо расположено так, чтобы образовывать единую деталь с валом. С использованием обмотки датчик создает магнитное поле, которое замыкается либо на воздушном зазоре между двумя зубьями фонического колеса, либо на одном зубе фонического колеса. Таким образом, измеренный магнитный поток меняется в зависимости от прохождения зубьев фонического колеса пропорционально скорости вращения фонического колеса. Частота переменного напряжения, генерируемого таким образом, равна частоте прохождения зубьев фонического колеса, при этом сама по себе показывает скорость вращения вала, а амплитуда этого переменного напряжения является функцией воздушного зазора и частоты сигнала. В международной заявке на патент WO2014/207369 Заявитель описал гайку, которую можно навинтить на вал авиационного двигателя, например, чтобы механически скрепить этот вал с шариковым подшипником, зубья которой могут взаимодействовать с датчиком скорости вращения, работающим по такому принципу. Более того, по меньшей мере часть зубьев гайки содержат полости, предохраняя затягивание гайки, при этом обеспечивая наибольшее число интервалов отсутствия в детали, чтобы допустить выполнение точного измерения скорости вращения вала.
Системы измерения скорости вращения с фоническим колесом, в частности, могут быть использованы для измерения так называемой номинальной характеристики "N1" (скорости вращения) каскада низкого давления двухкаскадного реактивного двигателя. На двигателях "прямого привода" (прямой привод крыльчатки от вала низкого давления) эта номинальная характеристика N1 также является номинальной характеристикой крыльчатки. Датчик фонического колеса также может быть использован для измерения номинальной характеристики N2 вращения каскада высокого давления двухкаскадного реактивного двигателя или скорости вращения другого вращающегося элемента двигателя.
Синусоидально изменяющийся сигнал, полученный на клеммах датчика с переменным магнитным сопротивлением с помощью электронной схемы, расположенной перед блоком управления двигателем, можно преобразовать в прямоугольный сигнал, на котором блок управления двигателем может выполнять измерение частоты. Преобразование синусоидального сигнала в прямоугольный сигнал, в частности, выполняют с помощью триггера Шмитта с предварительно заданным порогом возобновления и сигналом сброса. Прямоугольный сигнал на выходе триггера Шмитта переключается на высокое значение, если входное напряжение превышает порог сброса, и переключается на низкое значение, если входное напряжение падает ниже порога возобновления.
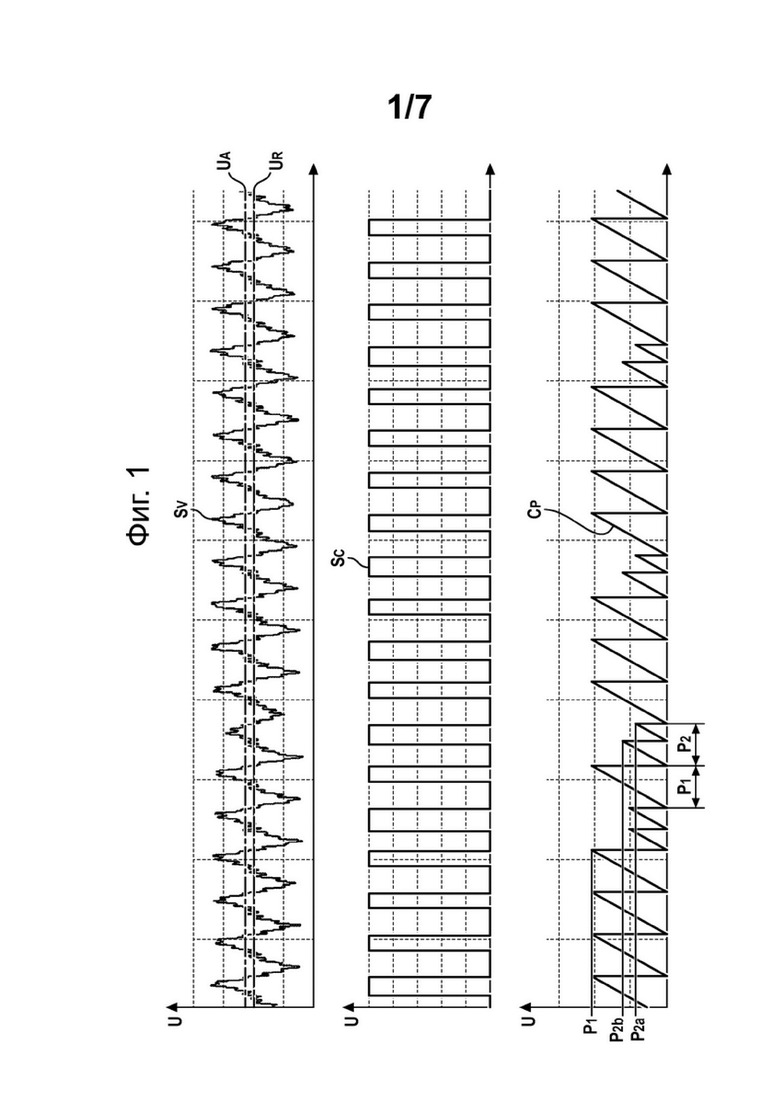
Тем не менее, прямоугольный сигнал, полученный для датчика с фоническим колесом, может быть сильно нарушен из-за случайного шума. Части датчика могут быть подвержены воздействию электромагнитных помех из-за механических колебаний определенных частей двигателя. Можно наблюдать прерывистые шумовые события, но также и шумовые сигналы переменного типа, накладываемые на сигнал, представляющий вращение фонического колеса (требуемый сигнал). В связи с этим на фиг. 1 на первой оси показано напряжение SV на контактах датчика с фоническим колесом с течением времени для случая сигнала, измененного случайным шумом переменного типа с частотой, большей, чем у требуемого сигнала, а на второй оси показан прямоугольный сигнал SC, полученный после придания сигналу SV напряжения прямоугольной формы на выходе триггера. Поскольку пиковое напряжение шума может быть локально больше, чем разница напряжения между порогом UR перезапуска и порогом UA сброса, переменный шум может вызывать ложные переключения прямоугольного сигнала. Третья ось иллюстрирует изменения сигнала CP подсчета последовательных периодов прямоугольного сигнала SC с течением времени. Задержка по времени, показанная кривой этой третьей оси, возобновляется при каждом переключении прямоугольного сигнала вниз с высокого уровня на низкий уровень. Например, в течение периода P1, показанного на фигуре, не происходит ложного переключения из-за шума. С другой стороны, в течение следующего периода P2 обнаруженный сигнал SV пересекает порог UA сброса, а затем снова падает ниже порога UR перезапуска из-за паразитного переменного шума, накладываемого на требуемый сигнал. Время, прошедшее между этими двумя проходами порога срабатывания, в действительности меньше, чем период P1, что приводит к последовательным быстрым переключениям прямоугольного сигнала SC и к обнаружению вместо одного "полного" периода P2, который был бы получен без ложного переключения, двух последовательных "разделенных" периодов P2a и P2b квадратного сигнала SC. Тогда искажается скорость вращения вала.
Известное решение состоит в фильтрации паразитного шума перед электронной схемой, которая вырабатывает прямоугольный сигнал. Это низкоуровневое решение, реализованное перед блоком управления двигателем. Например, общепринято с помощью фильтра нижних частот отфильтровывать шумы, частота которых превышает частоту требуемого сигнала. Однако низкочастотная фильтрация может сдвинуть фазу полученного измерения. Измерение со сдвигом фазы может препятствовать другим функциям, которые могут выполняться сигналом, полученным на клеммах датчика с переменным магнитным сопротивлением, например, функции балансировки двигателя, если положение вала принимают в качестве эталона для отслеживания других элементов двигателя. Кроме того, фильтрация нижних частот может уменьшить амплитуду сигнала. При постоянных значениях порогов возобновления и сброса и при уменьшенной амплитуде сигнала измерения скорости вращения точность полученного измерения частоты снижается. Эта проблема еще более актуальна при низких значениях номинальной мощности двигателя (например, при запуске двигателя), когда отношение полной амплитуды паразитного шума переменного типа к полной амплитуде требуемого сигнала может быть больше, чем для более высокой номинальной мощности двигателя.
Более того, существуют программные решения, реализованные на уровне прикладной системы цифрового интерфейса двигателя (например, системы типа FADEC (автономная цифровая система управления двигателем)), выполняющие постобработку синусоидального напряжения, полученного на клеммах датчика с переменным магнитным сопротивлением. Однако ни одно из существующих решений не является полностью подходящим для задачи обработки сигнала, который является зашумленным из-за высокочастотного переменного шума.
В частности, решения предшествующего уровня техники, основанные на простом усреднении измерений периода, полученных в более ранние моменты времени, для определения периода прохождения зубьев фонического колеса в текущий момент времени, могут быть эффективными только при условии, что получено достаточное количество незашумленных "полных" периодов.
Сущность изобретения
Настоящее изобретение решает вышеупомянутые задачи посредством постобработки величин периодов, обнаруженных в прямоугольном сигнале, при этом можно реализовать эту обработку на уровне программного приложения цифрового интерфейса двигателя, чтобы воссоздать "требуемый период" (т.е. период требуемого сигнала, который был бы получен без паразитного шума) на основе набора отсчетов периодов прямоугольного сигнала, сохраненных в памяти, выполненной в виде кольцевого буфера. Эта постобработка основана на наблюдении, что при наличии ложных переключений, таких как те, которые выделены в сигнале SC на фиг. 1, показанном ранее, взяв сумму нескольких последовательных периодов сигнала SC, можно получить значение очень близкое к значению периода, который бы наблюдался для требуемого сигнала. Способ в соответствии с изобретением позволяет находить корректные суммы для взятия путем выполнения ряда суммирований отсчетов последовательных периодов и сравнения этих сумм с пороговыми значениями правдоподобия, вычисленными как функция выполненных ранее измерений периода и оценки.
Целью изобретения в соответствии с первым аспектом является способ измерения скорости вращения вала авиационного двигателя, включающий в себя следующие этапы:
получают переменный сигнал обнаружения скорости вращения, полученный на контактах датчика скорости, содержащего фоническое колесо, приводимое во вращение валом,
преобразуют упомянутый переменный сигнал в прямоугольный сигнал, причем прямоугольный сигнал переключается на низкий уровень напряжения и переключается на высокий уровень напряжения, что соответствует прохождению переменного сигнала напряжения ниже порога возобновления и выше порога сброса соответственно,
сохраняют в памяти типа кольцевого буфера множество отсчетов периодов прямоугольного сигнала и сравнивают каждый из упомянутых отсчетов с нижним пределом периода и верхним пределом периода, чтобы определить валидные отсчеты, значение которых содержится между этими двумя пределами;
если количество определенных валидных отсчетов больше, чем первое пороговое значение, то на основе упомянутых валидных отсчетов определяют требуемый период прямоугольного сигнала,
и по меньшей мере при условии, что количество валидных отсчетов меньше первого порогового значения, определяют период требуемого сигнала посредством выполнения следующих подэтапов:
вычисляют множество сумм по меньшей мере двух отсчетов,
вычисляют среднее значения набора, содержащего некоторое число валидных отсчетов периода и некоторое число сумм из множества сумм по меньшей мере двух отсчетов, причем требуемый период прямоугольного сигнала принимают равным упомянутому среднему значению.
Способ в соответствии с изобретением не требует наличия отсчетов периодов, соответствующих полным периодам требуемого сигнала. Даже если из-за ложных переключений, полученных на прямоугольном сигнале, получены только отсчеты "разделенных" периодов, способ в соответствии с изобретением способен находить период, близкий к тому, который был бы получен для требуемого сигнала.
Способ в соответствии с изобретением был разработан на основе наблюдения, что при наличии ложных переключений, таких как те, которые выделены в сигнале SC на фиг. 1, показанном выше, взяв сумму нескольких последовательных периодов сигнала SC, можно получить значение очень близкое к значению периода, который бы наблюдался для требуемого сигнала.
Преимущественно, этот способ может демонстрировать следующие дополнительные признаки:
Способ содержит дополнительный этап, на котором из множества вычисленных сумм отсчетов определяют валидные суммы отсчетов, которые лежат между нижним и верхним пределами периода, причем вычисление требуемого периода прямоугольного сигнала выполняют путем вычисления среднего значения набора, состоящего из валидных отсчетов периодов и валидных сумм отсчетов;
отсчеты, суммируемые для определения валидных сумм, являются последовательными выборками;
Если сумма числа валидных отсчетов и числа валидных сумм отсчетов меньше второго порогового значения, то требуемый период прямоугольного сигнала принимают равным требуемому периоду прямоугольного сигнала, полученного во время предыдущей итерации способа;
Нижний и верхний пределы периода вычисляют на основе значения консолидированного периода и максимального значения изменения периода;
Консолидированный период затем принимают равным требуемому периоду прямоугольного сигнала, полученного в более ранний момент времени;
Затем с использованием закона максимального градиента скорости вращения получают максимальное значение изменения периода, причем максимальный градиент в данный момент является функцией скорости вращения;
Во время фазы инициализации измерения, т.е. фазы, в течение которой число отсчетов валидных периодов не превышает третьего порогового значения, или в течение которой отсчеты периодов, обнаруженные в прямоугольном сигнале, взаимно рассредоточены за пределами предварительно заданного порогового процента, требуемый период прямоугольного сигнала оценивают с помощью теоретической численной модели оценки;
Затем, требуемый период прямоугольного сигнала определяют во время фазы инициализации с использованием численной модели номинальной характеристики как функции термодинамических параметров двигателя, предпочтительно значения номинальной мощности каскада высокого давления, атмосферного давления или регулировки статора компрессора.
В соответствии со вторым аспектом изобретение относится к блоку управления турбинного двигателя, выполненному с возможностью реализации этапов описанного выше способа.
Наконец, в соответствии с третьим аспектом изобретение относится к компьютерному программному продукту, предназначенному для использования в прикладной системе блока управления турбинным двигателем, кодовые инструкции которого позволяют реализовать описанный выше способ.
Краткое описание чертежей
Фиг. 1 уже была описана выше.
Другие признаки, цели и преимущества изобретения станут очевидны из последующего описания, которое является всего лишь иллюстративным и неограничивающим, сопровождаемого следующими дополнительными прилагаемыми чертежами:
На фиг. 2 на примере зашумленного сигнала на выходе датчика фонического колеса показано число ошибочных определений периодов прямоугольного сигнала.
На фиг. 3 представлен теоретический сигнал напряжения, полученный в результате наложения требуемого сигнала и синусоидального переменного шума, чтобы показать принцип сложения отсчетов периода.
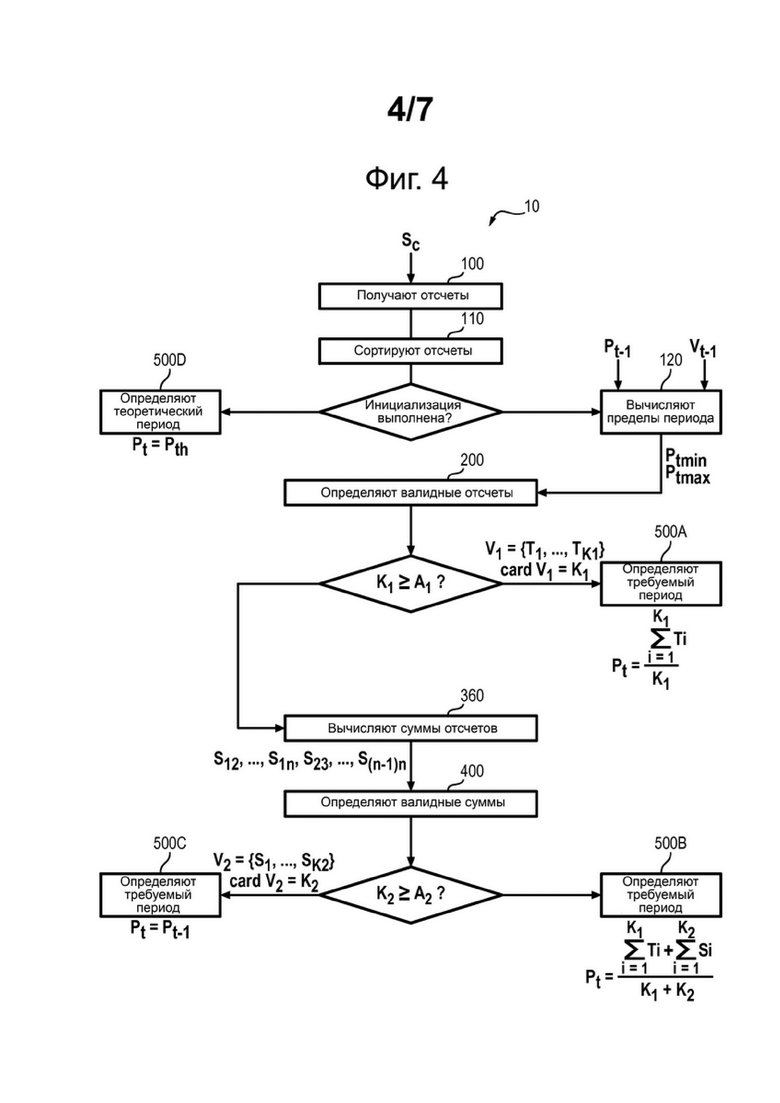
На фиг. 4 схематично представлен вариант осуществления алгоритма обработки отсчетов периода, полученных в кольцевой памяти, для пересчета требуемого периода.
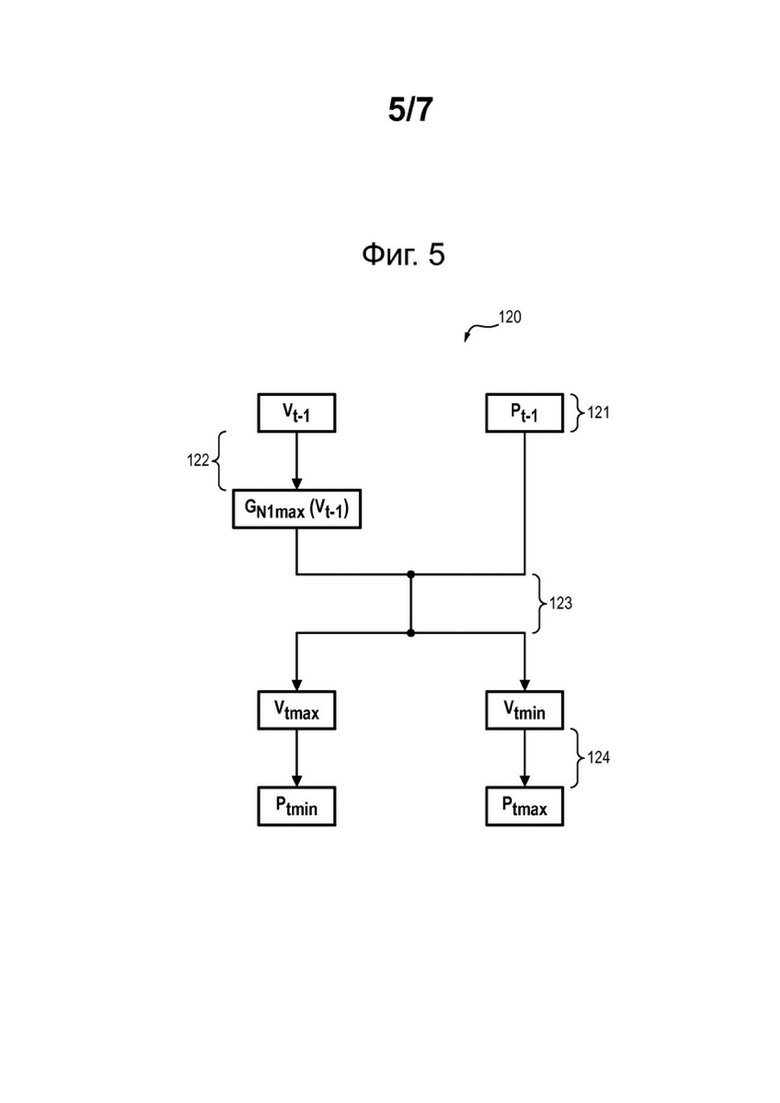
На фиг. 5 представлен вариант осуществления алгоритма определения интервала правдоподобия в алгоритме, показанном на фиг. 4.
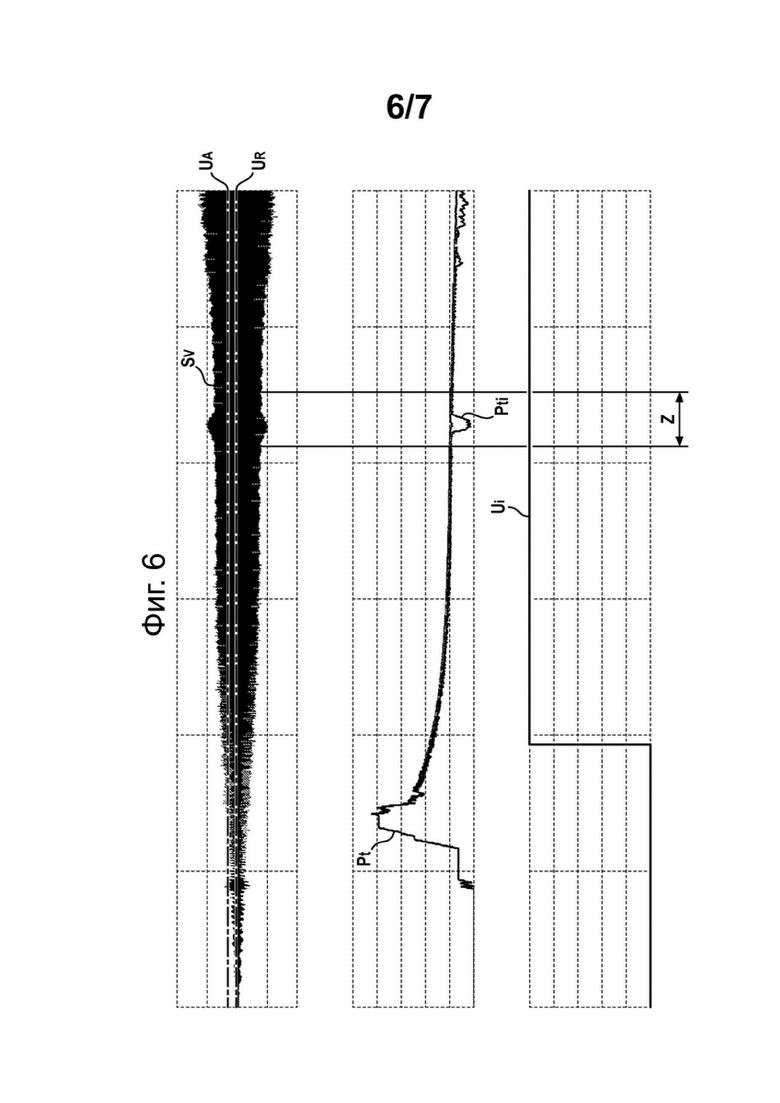
На фиг. 6 показаны результаты, полученные с использованием алгоритма, показанного на фиг. 4, на сигнале скорости вращения вала на основе фазы инициализации измерения и в течение периода, содержащего ограниченный интервал Z времени.
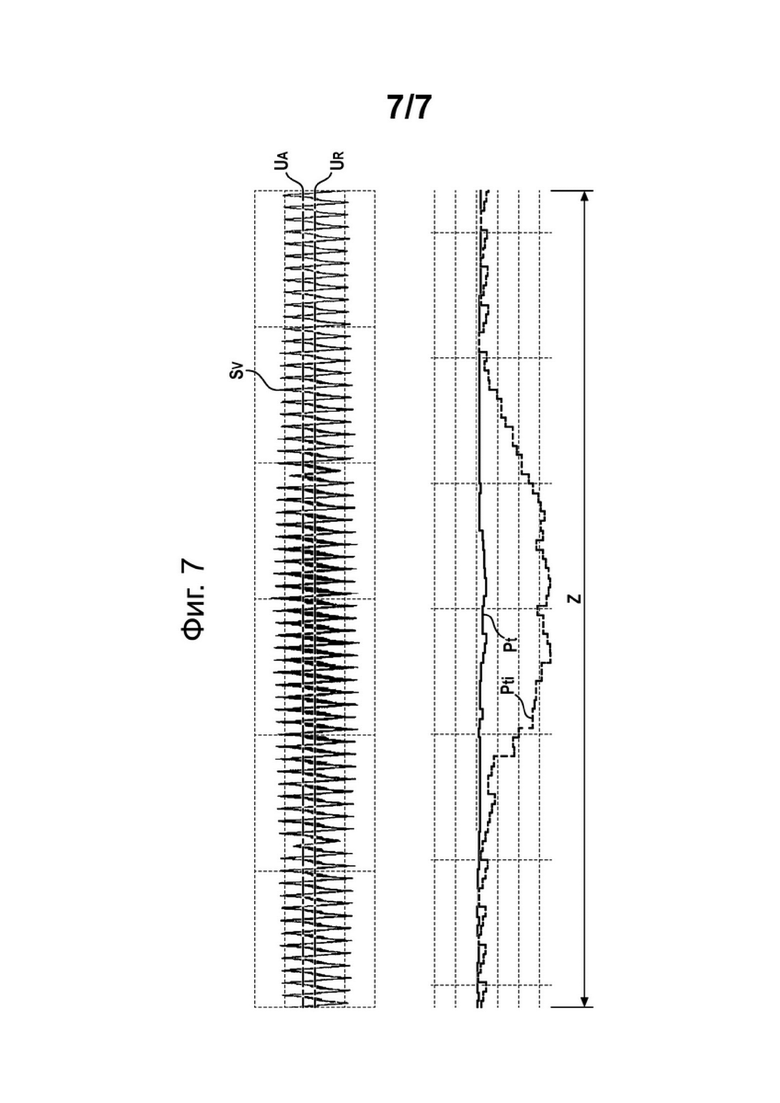
На фиг. 7 на более короткой временной шкале в диапазоне Z представлены сигналы, приведенные на фиг. 6.
Подробное описание вариантов осуществления изобретения
В дальнейшем описании переменный сигнал SV получают на контактах датчика фонического колеса для определения скорости вращения вала каскада (BP) низкого давления двухкаскадного реактивного двигателя. После датчика и перед электронным контроллером двигателя (EEC), таким как FADEC3, сигнал SV преобразуют в прямоугольный сигнал SC. Для этого сигнал SV фильтруют с использованием RC-фильтра, затем обрезают, затем снова фильтруют, и наконец приводят к прямоугольной форме с помощью триггера Шмитта с порогом UR возобновления, равным 0 В, и порогом UA сброса, равным 0,232 В.
Периоды прохождения зубьев фонического колеса измеряют на прямоугольном сигнале SC, рассматривая время между двумя направленными вниз фронтами прямоугольного сигнала. Здесь, датчик фонического колеса измеряет номинальную характеристику N1 двигателя. Тем не менее, те же самые условия обработки с тем же успехом можно использовать для измерения любой другой номинальной характеристики вращающегося элемента двигателя, такой, например, как измерение номинальной характеристики N2.
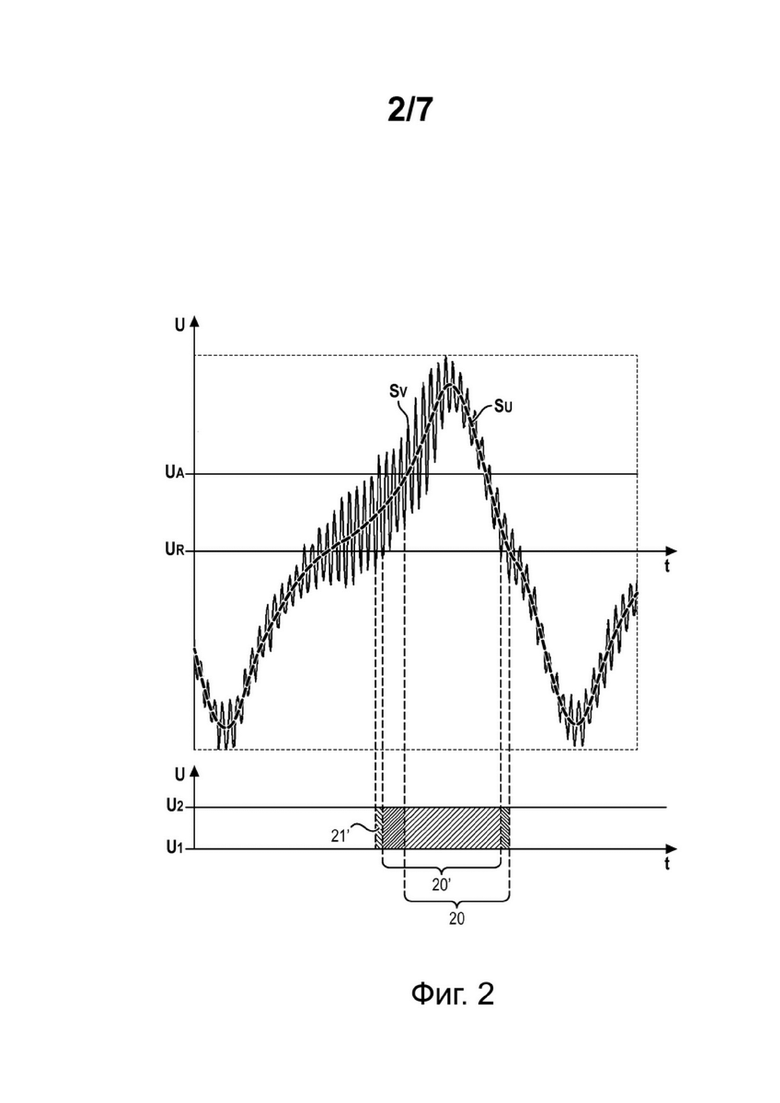
Однако, как видно выше в отношении фиг. 1, прямоугольный сигнал SC может демонстрировать переключения, которые не соответствуют направленным вверх или направленным вниз фронтам для требуемой части сигнала обнаружения номинальной характеристики, а которые, наоборот, вызваны изменением напряжения паразитного переменного шума (нежелательная часть сигнала). Это явление показано на фиг. 2. На первой оси теоретическое напряжение SV на контактах датчика фонического колеса представлено как функция времени t. Также представлена требуемая часть сигнала SU, полученного теоретически путем вычитания из сигнала SV вклада паразитного переменного шума. На второй временной оси показан наложенный прямоугольный сигнал, связанный с сигналом SV, и прямоугольный сигнал, связанный с теоретическим требуемым сигналом SU, переключающиеся между низким уровнем U1 и высоким уровнем U2. Переключение этих прямоугольных сигналов на высокий уровень U2 происходит, когда напряжение сигнала SV превышает пороговое значение UA, а переключение этих прямоугольных сигналов на низкий уровень U1 происходит, когда напряжение сигнала SV падает ниже порогового значения UR.
На второй оси видно, что зашумленный сигнал SV после приведения к прямоугольной форме дает направленный вверх фронт и направленный вниз фронт, соответствующий части 20', затем направленный вверх фронт и направленный вниз фронт, соответствующий части 20', в то время как требуемый сигнал SU после приведения к прямоугольной форме дает единственный направленный вверх фронт и единственный направленный вниз фронт, соответствующий части 20. Более того, направленный вверх и направленный вниз фронты части 20' не соответствуют направленному вверх и направленному вниз фронтам части 20. Таким образом, определение периода (например, периода между двумя последовательными направленными вниз фронтами прямоугольного сигнала) является ошибочным для зашумленного сигнала SV относительно периода, полученного для требуемого сигнала SU. Тем не менее, именно период требуемого сигнала SU представляет требуемую номинальную характеристику N1.
Далее следует описание способа 10 обработки, применяемого к множеству значений T1,…,Tn периода, полученных на прямоугольном сигнале SC. Способ 10 реализован посредством алгоритма, реализованного в прикладной системе электронного контроллера двигателя (EEC). Его используют для восстановления консолидированного периода Pt из значений T1,...,Tn. Напомним, что период прямоугольного сигнала SC здесь получают между двумя последовательными направленными вниз фронтами (от высокого уровня напряжения U2 к низкому уровню напряжения U1) этого прямоугольного сигнала. Нет необходимости предполагать заранее, что эти периоды являются "полными", т.е. связанными с теоретическим требуемым сигналом обнаружения номинальной характеристики, исключающим паразитный шум, или "разделенным", т.е. вычисляемым между ложными переключениями сигнала SC, связанными с шумом. Способ 10 используют для восстановления t-го периода Pt, обеспечивающего хорошую аппроксимацию периода теоретического требуемого сигнала SU. Способ 10 здесь реализован в цифровой форме на уровне прикладного программного обеспечения EEC цифрового интерфейса авиационного двигателя.
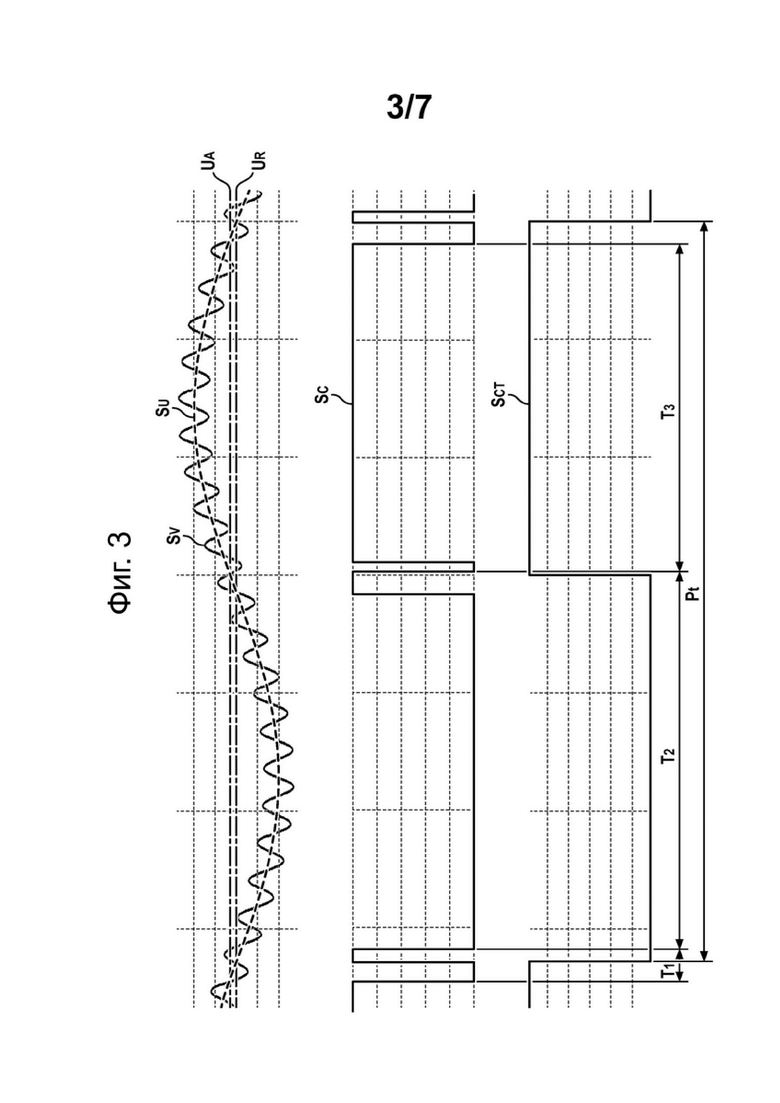
Воспользуемся фиг. 3 для пояснения целей и принципов способа 10 с использованием упрощенного теоретического примера. На первой оси представлен пример сигнала SV напряжения с течением времени, полученный путем суммирования низкочастотного синусоидального теоретического требуемого сигнала SU, также представленного на первой оси, и высокочастотного шумового сигнала. Также представленный порог UR возобновления и порог UA сброса триггера Шмитта используют для придания сигналу SV и теоретическому сигналу SU прямоугольной формы, причем эти сигналы, соответствующие прямоугольному сигналу SC, показаны параллельно на второй оси, а теоретический прямоугольный сигнал SCT показан параллельно на третьей оси. Видно, что период Pt, который был бы получен для сигнала SCT, частично перекрывает сам себя на первом периоде T1, эффективно полученном для сигнала SC, затем полностью перекрывает сам себя на двух следующих периодах T2 и T3, затем частично перекрывает себя на четвертом никак не обозначенном на фиг. 3 периоде.
Однако, складывая последовательные периоды T1, T2 и T3, получают величину периода, которая очень близка к значению Pt, которое составляет требуемый период для измерения частоты. Одна интерпретация этого результата заключается в том, что два направленных вниз фронта SC, отмечающие соответственно начало периода T1 и конец периода T2, приблизительно соответствуют последовательным направленным вниз фронтам, которые наблюдались бы на сигнале STC, давая период Pt. Если провести аналогию между этим теоретическим примером и реальным случаем измерения сигнала обнаружения, полученного на контактах датчика фонического колеса, то сигнал, фактически наблюдаемый на контактах датчика, представлял бы собой сигнал SV, дающий прямоугольный сигнал SC. Таким образом, одна цель способа 10 заключается в том, чтоб получить хорошую аппроксимацию периода Pt, получаемого прямоугольным сигналом SCT, при этом период Pt не наблюдают непосредственно.
Далее следует описание этапов способа 10 обработки величин периода прямоугольного сигнала SC, полученного из сигнала SV детектирования скорости вращения, взятого на контактах датчика фонического колеса, при этом способ 10, напомним, реализован посредством прикладного программного обеспечения или прикладной системы цифрового интерфейса электронного контроллера двигателя. Этапы способа 10 описаны далее в отношении фиг. 4.
На этапе 100 получение значений T1,...,Tn периода прямоугольного сигнала выполняют следующим образом. Первый счетчик детектирует направленные вниз фронты прямоугольного дискретизированного сигнала высокой частоты по отношению к фронтам, ожидаемым для прямоугольного сигнала. Например, измерительная плата периодов прохождения зубьев фонического колеса может иметь период отсчетов порядка 0,25х10-6 с. Второй счетчик детектирует направленные вниз фронты прямоугольного сигнала SC. Таким образом, значения промежутка времени между двумя последовательными направленными вниз фронтами прямоугольного сигнала SC могут быть сохранены в циклической памяти B типа циклического буфера, который может хранить в памяти определенное число измерений периода. Здесь буфер B для измерения периода предпочтительно реализовать в электронной схеме, а не в виде цифровой реализации в прикладной системе цифрового интерфейса электронного контроллера двигателя, так как период вычисления этого контроллера двигателя обычно составляет порядка 0,015 с и не допускает точного измерения периода прохождения зубьев фонического колеса (скорость которых может достигать 7000 оборотов в минуту для 60 зубьев). Затем, циклический буфер B может подать значения T1,...,Tn, а также моменты измерения этих значений, в прикладную систему.
Число образцов, обозначенное здесь через n, выбирают не меньше, чем минимальное число образцов, необходимых для обеспечения достаточной точности измерения. Минимальное число может соответствовать, например, числу зубьев фонического колеса. Принимая на последующих этапах способа 10, повторяемых в дальнейшем, среднее число последовательных отсчетов превышающим число зубьев фонического колеса, любые расхождения между измерениями, которые будут связаны с неоднородностями геометрии зубьев колеса, будут устранены. Ожидаемая частота паразитного шума, влияние которого необходимо уменьшить, также участвует в определении минимального количества отсчетов на буфер B: чем выше частота шума по отношению к требуемому сигналу, тем больше "разделенных" периодов может быть необходимо для восстановления требуемого периода прохождения зубьев фонического колеса, в соответствии с принципом, описанным в отношении фиг. 3.
Затем, на этапе 110 отсчеты T1,…, Tn сортируют по порядку от самого старого из отсчетов до самого последнего. Этот этап 110 позволяет на последующих этапах принимать суммы последовательных периодов с течением времени. Здесь для большего удобства предполагается, что отсортированные отсчеты сохраняют свой порядок от T1 до Tn после сортировки. Таким образом, на выходе этапа 110 прикладная система имеет вектор, состоящий из n отсчетов последовательных периодов.
После этапа 110 в настоящем варианте осуществления изобретения существуют два различных сценария в соответствии со значением двоичного сигнала инициализации, который указывает, находится ли измерение периода в инициализированном состоянии или нет.
В частности, как будет описано далее, на следующих этапах восстановления консолидированного периода на основе этапа 120 в качестве входных данных принимают значение консолидированного периода, полученное на предыдущем шаге вычисления. Следовательно, эти шаги требуют, чтобы было получено по меньшей мере одно значение консолидированного периода, признанное удовлетворительным.
В настоящем варианте выполняют проверку отсчетов периода T1, ..., Tn, отсортированных в буфере B. В качестве альтернативы также можно выполнить проверку для инициализации по неотсортированным выборкам периода. Проверяют, является ли определенное количество отсчетов среди отсчетов T1,…, Tn (например, десять отсчетов) или, в качестве альтернативы, все отсчеты в достаточной степени взаимно связанными, т.е. их значения слабо рассредоточены относительно предварительно определенного порогового процента дисперсии D.
Например, если проверка инициализации требует, чтобы три отсчета периода были слабо взаимно рассредоточены, и для порогового значения дисперсии D, равного 5%, выполняют проверку, чтобы проверить, выполнено ли логическое уравнение  И
И  .
.
В качестве альтернативы, проверка инициализации может состоять в проверке того, что превышает ли предварительно заданный порог A3число отсчетов периодов из T1,…, Tn, лежащих в интервале правдоподобия [Pmin, Pmax], где значения Pmin и Pmax, например, вычисляют с использованием теоретической модели, зависящей от условий эксплуатации двигателя.
Пока проверка инициализации не даст положительного результата для некоторой итерации способа 10, значение двоичного сигнала инициализации остается равным нулю, и измерение считается неинициализированным. Во время этой фазы инициализации, когда измерение еще не инициализировано, вместо определения консолидированного периода Pt из предыдущего консолидированного периода Pt-1, Pt вычисляют посредством теоретической численной модели Pth на этапе 500D (процедура D этапа 500 определения периода Pt). Теоретическая численная модель Pth может соответствовать теоретической модели номинальной характеристики N1 как функция термодинамических параметров двигателя, таких как номинальная мощность каскада высокого давления, атмосферное давление или регулировка обмотки статора компрессора. Результаты, полученные на этапе инициализации измерения периода, описаны ниже со ссылкой на фиг. 6 и 7.
Если результат проверки инициализации оказывается отрицательным в течение слишком длительного периода (относительно предварительно заданного промежутка времени), что подразумевает, что сигнал очень зашумлен, то можно изменить значение двоичного сигнала инициализации на 1 и инициализировать алгоритм с использованием значения консолидированного периода Pt, полученного на основе теоретической численной модели, дающей период Pth. При установлении интервала правдоподобия [Pt min, Pt max] на следующих итерациях после инициализации можно учесть предел погрешности определения этого теоретического периода из-за неопределенности измерения номинальной характеристики двигателя, использованного в теоретической модели.
Если проверка инициализации дает положительный результат, то двоичный сигнал инициализации увеличивают до значения 1. Затем сигнал инициализации остается равным 1 до конца измерения периода прохождения зубьев фонического колеса, и на следующих итерациях способа используют ранее полученные значения консолидированного периода. Во время итерации способа, на которой значение двоичного сигнала инициализации увеличивают до 1, можно вычислить начальный консолидированный период Pt0 из отсчетов, которые были определены как взаимно связанные. Например, значение Pt0 можно принять равным среднему арифметическому отсчетов периода, которые считаются взаимно связанными. Следующий этап 120 может быть реализован в следующей итерации, принимая в качестве предыдущего консолидированного периода значение Pt0.
При условии, что измерение периода инициализировано, после этапа 110 сортировки отсчетов способ 10 продолжается на этапе 120, на котором вычисляют нижний предел и верхний предел требуемого периода. В качестве альтернативы, если измерение периода инициализировано, то этап 120 может быть реализован до этапа 110 или параллельно с этапом 110. Этап 120 состоит в том, чтобы установить интервал правдоподобия, который затем позволит определить среди отсортированных отсчетов T1,…,Tn те, которые могут соответствовать "полным" периодам, другими словами, отсчеты периодов, пригодные для измерения частоты прохождения зубьев фонического колеса.
Подробности алгоритма 120 вычисления интервала правдоподобия для t-го периода Pt прохождения зубьев фонического колеса, ограниченного нижним пределом Pt min и верхним пределом Pt max, описаны со ссылкой на фиг. 5.
На этапе 121 получают значения Pt-1 и Vt-1 соответственно (t-1)-го значения периода прохождения зубьев фонического колеса, определенного ранее с использованием алгоритма 100, и (t-1)-го соответствующего значения скорости вращения. Значения периодов, например, выражают в миллисекундах, а значения скорости вращения, например, выражают в оборотах в минуту (об/мин).
Затем, на этапе 122 и с использованием предварительно заданного закона максимально возможного градиента скорости вращения фонического колеса (максимального градиента с номинальной характеристики N1) для периода Pt вычисляют максимальный градиент скорости вращения. Закон GN1max может быть получен из испытаний двигателя или предыдущих вычислений. Здесь он выражен как функция скорости вращения вала, но может зависеть от других параметров, связанных с условиями работы двигателя. Градиент скорости вращения может быть выражен в об/мин в секунду.
На этапе 123 полученное значение GN1max(Vt-1) используют для получения максимального изменения скорости вращения за период Pt. Здесь максимальное значение градиента GN1max(Vt-1) умножают на период Pt-1, чтобы получить оценку этого максимального изменения. Здесь это максимальное значение изменения представляет собой абсолютное значение и может привести к ускорению или замедлению вращения фонического колеса. Таким образом, полученную скорость Vt max вычисляют путем прибавления этого максимального изменения к Vt-1, а полученную скорость Vt min вычисляют путем вычитания этого максимального изменения из Vt-1.
В качестве альтернативы, максимальное изменение, имеющее место в направлении замедления (минимальное как относительное значение) скорости вращения, может не быть равно противоположному максимальному изменению, имеющему место в направлении ускорения.
Наконец, на этапе 124 из этих значений максимальной скорости Vt max и минимальной скорости Vt min соответственно получают значения минимального периода Pt min и максимального периода Pt max. Сначала из Vt max и Vt min получают максимальное и минимальное значения частоты, соответственно ft max и ft min, прохождения зубьев фонического колеса. Например, если скорость выражается в об/мин, то сначала выполняют деление на 60 (для получения значений скорости в оборотах в секунду), затем значения, полученные после деления, умножают на число зубьев фонического колеса, чтобы получить максимальную и минимальную частоты прохождения зубьев. Наконец, чтобы получить соответствующие периоды Pt min и Pt max, соответственно учитывают обратное значение частоты ft max и ft min, применяя насыщение известным способом, чтобы избежать деления на 0.
Возвращаясь к схеме на фиг. 4, на этапе 200 среди T1,…,Tn и на основе интервала правдоподобия, ограниченного периодами Pt min и Pt max, определяют валидные отсчеты T1,…, Tk1, значение которых лежат между периодами Pt min и Pt max, а также число k1 этих валидных отсчетов. Здесь V1 обозначает множество отсчетов периода буфера B, обозначенных на этом этапе как валидные.
Затем рассматривают первое пороговое значение A1 для числа валидных отсчетов. Число k1 валидных отсчетов (не обязательно последовательных) сравнивают с пороговым значением A1.
Если k1 больше или равно A1, то считают, что имеется достаточное количество полученных валидных отсчетов, чтобы путем усреднения (в данном случае посредством среднего арифметического, которое в качестве альтернативы может быть геометрическим) получить валидные отсчеты t-го периода Pt прохождения зубьев фонического колеса, что имеет значение для измерения номинальной характеристики N1. Другими словами, среди отсчетов, содержащихся в буфере B, имеется достаточно отсчетов, относительно которых принято решение, что они не происходят от ложных переключений и соответствуют "полным" периодам. Таким образом, если k1 больше или равно A1, то прикладная система электронного контроллера двигателя на этапе 500A (процедура A этапа 500) определяет, что Pt равно среднему арифметическому k1 валидных отсчетов периода, содержащихся в B.
Выбирают пороговое значение A1, достаточное для получения консолидированных периодов, значимых для измерения частоты, но не слишком высокое, чтобы не усложнять чрезмерно вычисления и не перегружать память прикладной системы. Например, предпочтительно рассматривать порог А1 равный количеству зубьев фонического колеса или кратный этому числу зубьев: таким образом, если некоторые зубья имеют геометрические неровности относительно других зубьев, что обуславливает неравенства периода в требуемом сигнале (не связанные с наличием паразитного шума), алгоритм уменьшит влияние этих неровностей, взяв среднее значение ряда периодов, охватывающего весь периметр фонического колеса.
Если, с другой стороны, k1 меньше, чем A1, то необходимо перейти к следующему этапу 300 вычисления сумм отсчетов.
Как было показано ранее в отношении фиг. 3, один из принципов добавления нескольких невалидных отсчетов периода заключается в получении сумм отсчетов, соответствующих "полным" периодам требуемого сигнала, рассеивая влияние паразитных переключателей из-за шума. На практике алгоритм ищет суммы последовательных отсчетов, суммарное значение которых лежит в интервале правдоподобия, определенном ранее на этапе 120, а именно в интервале между Pt min и Pt max.
Таким образом, в описанном здесь варианте осуществления алгоритм для индекса i, изменяющегося от 1 до n-1 (n – число элементов буфера B), и для индекса j, строго превышающего i и изменяющегося от i+1 до n, вычисляет сумму, обозначенную через Sij, отсчетов периода буфера B от Ti до Tj, при этом напомним, что отсчеты T1,…,Tn были отсортированы по времени на этапе 110. Другими словами, здесь вычисляют все возможные суммы последовательных отсчетов буфера B.
Затем, на этапе 400, среди S12,…,S1n, S23,…,S(n-1) n и на основе интервала правдоподобия, ограниченного периодами Pt min и Pt max, определяют валидные суммы отсчетов S1,…,Sk2, значение которых лежит между периодами Pt min и Pt max, а также число k2 этих валидных сумм отсчетов. Здесь V2 обозначает набор сумм отсчетов, считающихся валидными. В качестве альтернативы, можно рассматривать значения нижнего и верхнего предела значения правдоподобия, которые будут отличаться от значений, определенных на этапе 200, или также, в качестве альтернативы, можно применять критерий, отличный от критерия принадлежности к интервалу [Ptmin, Ptmax], чтобы выбрать валидные суммы, либо можно не выбирать валидные суммы.
Так же, как на этапе 400, можно выделить два случая в соответствии с соотношением между числом k2 и вторым пороговым значением A2 для количества валидных сумм периодов. Порог A2 можно принять равным A1. Предпочтительно, пороговое значение A2 принимают большим, чем A1, так что вычисление консолидированного периода Pt путем усреднения валидных сумм отсчетов требует большего количества валидных сумм. Это оправдано, поскольку факт разрешения использования сумм отсчетов (а не только отсчетов периодов) при расчете консолидированного периода снижает точность измерения.
Если число k2 валидных сумм отсчетов больше или равно пороговому значению A2, то алгоритм на этапе 500B определяет, что консолидированный период Pt равен среднему, в данном случае арифметическому, набора, состоящего из k1 отсчетов, определенных как валидные ранее на этапе 200, дополненному k2 валидными суммами отсчетов, указанными на этапе 400.
Этот последний вариант вычисления консолидированного периода является очень выгодным, поскольку, в отличие от варианта вычисления на этапе 500А, он не требует наличия заранее определенного числа валидных отсчетов, взятых отдельно в буфере B. Другими словами, вычисление на этапе 500B может быть выполнено, даже если набор полученных отсчетов периода в буфере B или их большое количество являются "разделенными" и получены в результате ложных переключений. Алгоритм, основываясь на некогерентных периодах, взятых отдельно (с учетом используемого закона градиента номинальной характеристики), восстанавливает требуемый период для вычисления номинальной характеристики, что не только позволяет повысить точность измерения выходного сигнала фильтра, но также позволяет алгоритму функционировать, даже если ни один период, полученный на прямоугольном сигнале SC не является "полным".
Однако одно условие для успешного вычисления консолидированного периода на этапе 500B состоит в том, чтобы на основе невалидных отсчетов, содержащихся в буфере B, успешно восстановить суммы отсчетов последовательных периодов, которые определены как валидные, поскольку они лежат в интервале правдоподобия между Pt min и Pt max. Тем не менее, предпочтительно, если это условие не выполнено (то есть если отсчеты периода, полученные в буфере B, являются слишком зашумленными), алгоритм определения консолидированного периода обеспечивает присвоение значения Pt таким образом, чтобы иметь возможность продолжать выполнение способа 10 на следующих итерациях, имея консолидированное значение периода Pt. Здесь, если не имеется достаточного количества валидных сумм отсчетов периодов, период Pt принимают равным консолидированному периоду Pt-1, определенному на предыдущей итерации, на этапе 500C. Напомним, что во время фазы инициализации, в которой не имеется первого удовлетворительного консолидированного значения периода Pt, для получения Pt можно применить теоретическую модель, зависящую от условий работы двигателя.
На фиг. 6 и 7 показаны результаты, полученные с применением способа 10 к сигналу SV напряжения, полученному на клеммах датчика фонического колеса на основе фазы инициализации измерения. На этих фигурах на первой оси показано напряжение SV с течением времени, при этом отмечены пороговые значения UR перезапуска и сброса UA для триггера Шмитта, выполняющего придание сигналу SV прямоугольной формы. На второй оси в том же масштабе времени в виде наложения показан консолидированный период Pt, полученный с использованием способа 10, и другое значение Pti периода, которое было бы получено на основе того же сигнала SV при применении к нему простого алгоритма усреднения отсчетов периода. Наконец, на третьей оси в том же масштабе времени показано значение двоичного сигнала инициализации UI, рассчитанное в соответствии с приведенными выше условиями.
Значение Pti соответствует значению периода, полученному без разделения валидных отсчетов и невалидных отсчетов (относительно критерия, поясненного на этапе 200), и без взятия сумм последовательных отсчетов периода, измеренных на прямоугольном сигнале, полученном из сигнала SV. Алгоритм вычисления периода Pti (здесь подробно не описан) содержит тот же критерий инициализации, что и критерий инициализации, позволяющий управлять сигналом UI: вычисление Pti может быть инициализировано, если определенное количество отсчетов периода не являются взаимно рассеянными, превышая порог дисперсии D. Таким образом, на фиг. 6 значения времени на оси абсцисс, соответствующие значению 0 сигнала UI (фаза инициализации), не связаны со значением Pti. С другой стороны, на этапе инициализации способ 10 предоставляет значения Pt с использованием теоретической модели Pth, описанной выше, причем эти значения видны на второй оси фиг. 6.
Как только измерение корректно инициализировано, и сигнал UI увеличен до значения 1, значение Pti получают путем взятия среднего арифметического значения всех отсчетов периода, содержащихся в буфере B. Между тем, значение Pt получают в соответствии со способом 10, то есть, путем взятия среднего значения только валидных отсчетов, если алгоритм определяет число, превышающее первое пороговое значение A1, и в противоположном случае путем взятия сумм последовательных отсчетов в соответствии с условиями, описанными выше. На большой части временного диапазона, показанного на фиг. 6, например временного диапазона, в котором измерение инициализировано и которое предшествует диапазону, обозначенному через Z, на этапе 200 способа 10 все отсчеты буфера B определяют как валидные, а период Pt соответствует среднему арифметическому всех этих отсчетов. Таким образом, в этом временном интервале период Pt равен периоду Pti.
С другой стороны, в диапазоне Z на первой оси фиг. 6 видно, что максимальная амплитуда сигнала SV больше, чем амплитуда значений сигнала SV, полученных ранее. Здесь это указывает на паразитный шум переменного типа, который добавляется поверх требуемого сигнала во время измерения напряжения на клеммах датчика фонического колеса. В этом диапазоне многие отсчеты периода из отсчетов, полученных и сохраненных в кольцевом буфере B, являются "разделенными" и соответствуют ложным переключениям прямоугольного сигнала, связанного с сигналом SV. На фиг. 7 в меньшем масштабе времени можно видеть кривые первой и второй осей фиг. 6 во временном интервале Z. Значение Pti всегда получают путем взятия среднего арифметического одного и того же числа отсчетов периода, хотя многие из этих отсчетов являются "разделенными" и соответствуют длительностям, значительно меньшим, чем периоды требуемого сигнала. Таким образом, если сигнал SV является очень зашумленным, то значение Pti может достигать 1,0*10-5 с, тогда как оно составляет порядка 2,0*10-4 с в диапазонах времени измерения, в которых сигнал SV не очень зашумлен или не содержит шума. С другой стороны, используя алгоритм для вычисления консолидированного периода, который находит когерентные значения периода требуемого сигнала на основе "разделенных" периодов, хранящихся в кольцевом буфере B, значение Pt практически не уменьшается в диапазоне Z, так как оно не опускается ниже 1.7*10-4 с. Поэтому на измерение периода Pt практически не влияет наличие паразитного переменного шума в диапазоне Z.
Таким образом, описанный выше способ 10 без необходимости идентифицировать среди переключений прямоугольного сигнала те, которые соответствуют паразитному шуму, и те, которые соответствуют требуемому сигналу для измерения номинальной характеристики N1, позволяет значительно уменьшить влияние паразитного переменного шума на измерение периода прохождения зубьев фонического колеса. Тем самым, измерение скорости вращения фонического колеса и, следовательно, измерение номинальной характеристики N1 становятся более надежными. Это решение, простое для реализации в прикладной системе цифрового интерфейса двигателя, гораздо более эффективно, чем простое усреднение постоянного числа отсчетов периода, как показано выше. Кроме того, это решение является предпочтительным по сравнению с известными решениями, заключающимися в применении фильтра нижних частот, так как оно не влияет на точность и чувствительность измерения и не вызывает фазовый сдвиг сигнала, полученного на клеммах датчика фонического колеса.
Группа изобретений относится к способу измерения скорости вращения вала авиационного двигателя. Способ измерения скорости вращения вала авиационного двигателя на основе прямоугольного сигнала содержит следующие этапы: получение переменного сигнала обнаружения скорости вращения на контактах датчика фонического колеса; преобразование упомянутого переменного сигнала в прямоугольный сигнал; сравнение множества ранее сохраненных отсчетов периода прямоугольного сигнала с нижним и верхним пределами периода, чтобы определить валидные отсчеты, имеющие значение, лежащее между этими двумя пределами; если количество валидных отсчетов больше, чем первое пороговое значение, то определение требуемого периода прямоугольного сигнала на основе упомянутых валидных отсчетов: а по меньшей мере при условии, что число валидных отсчетов меньше, чем первое пороговое значение, вычисляют множество сумм отсчетов, и вычисляют среднее значение набора, содержащего ряд валидных отсчетов периода и ряд сумм из указанного множества сумм по меньшей мере двух отсчетов. Технический результат – повышение точности измерения скорости авиационного двигателя. 2 н. и 8 з.п. ф-лы, 7 ил.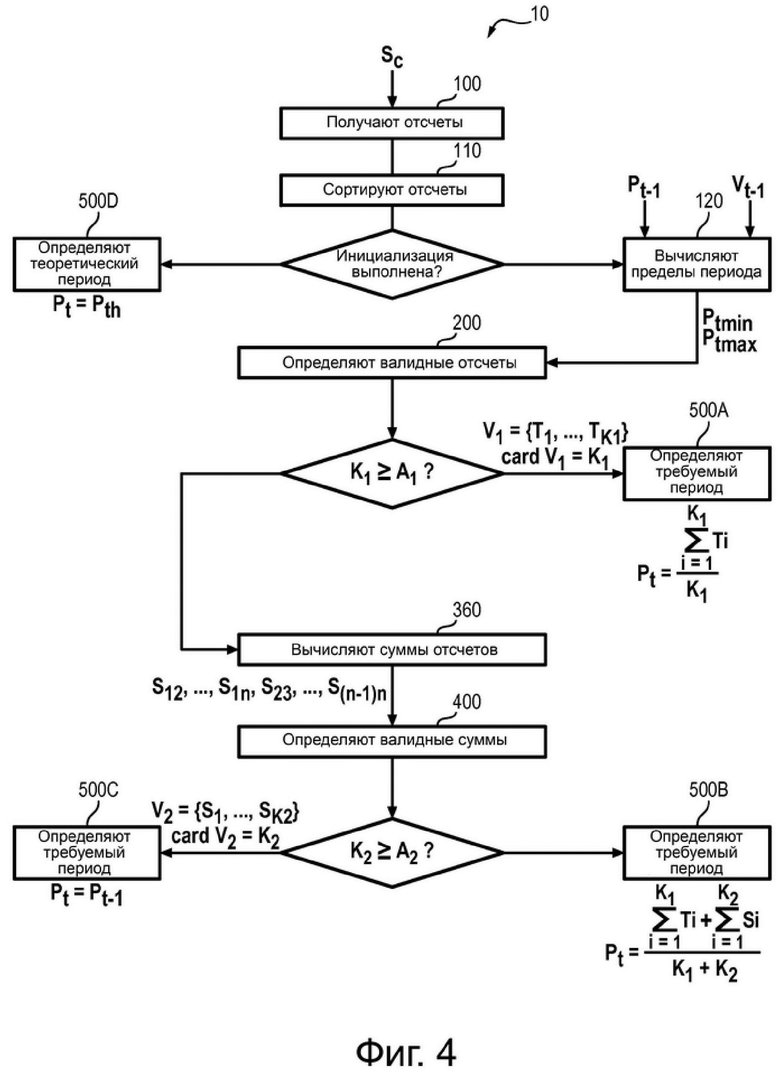
1. Способ измерения скорости вращения вала авиационного двигателя на основе прямоугольного сигнала (SC), причем упомянутый прямоугольный сигнал получают из переменного сигнала (SV) обнаружения скорости вращения, полученного на контактах датчика скорости, содержащего фоническое колесо, приводимое во вращение указанным валом,
при этом переключение упомянутого прямоугольного сигнала (SC) на низкий уровень (U1) напряжения и переключение на высокий уровень (U2) напряжения соответствует прохождению переменного сигнала (SV) напряжения ниже порога (UR) возобновления и выше порога (UA) сброса соответственно,
способ содержит этапы, на которых:
- сохраняют в памяти кольцевого буфера (B) множество отсчетов (T1,...,Tn) периода прямоугольного сигнала (SC),
- сравнивают каждый из упомянутых отсчетов с нижним пределом (Pt min) периода и верхним пределом (Pt max) периода для определения валидных отсчетов, значение которых лежит между этими двумя пределами;
- если количество определенных валидных отсчетов больше, чем первое пороговое значение (A1), то требуемый период (Pt) прямоугольного сигнала (SC) определяют на основе упомянутых валидных отсчетов,
отличающийся тем, что по меньшей мере при условии, что количество валидных отсчетов меньше первого порогового значения (A1), требуемый период (Pt) сигнала (SC) определяют посредством выполнения следующих этапов, на которых:
- вычисляют множество сумм по меньшей мере двух отсчетов (S12,…,S1n,S23,…,S(n-1)n),
- из указанного множества сумм определяют валидные суммы последовательных отсчетов, причем упомянутые валидные суммы лежат между указанными нижним пределом (Pt min) периода и верхним пределом (Pt max) периода,
- вычисляют среднее значение набора, содержащего ряд валидных отсчетов периода и ряд валидных сумм последовательных отсчетов, при этом требуемый период (Pt) прямоугольного сигнала принимают равным упомянутому среднему значению.
2. Способ измерения скорости по п. 1, содержащий дополнительный этап, на котором определяют из указанного множества вычисленных сумм отсчетов валидные суммы отсчетов, которые лежат между нижним и верхним пределами (Pt min, Pt max) периода,
вычисление требуемого периода (Pt) прямоугольного сигнала выполняют путем вычисления среднего значения указанного набора, состоящего из указанных валидных отсчетов периода и указанных сумм отсчетов, которые определены как валидные.
3. Способ измерения скорости по п. 1 или 2,
в котором если сумма указанного ряда валидных отсчетов и указанного ряда валидных сумм отсчетов меньше второго порогового значения (A2), то требуемый период (Pt) прямоугольного сигнала принимают равным требуемому периоду (Pt-1) прямоугольного сигнала, полученного во время предыдущей итерации способа.
4. Способ измерения скорости по одному из пп. 1-3, в котором нижний и верхний пределы (Pt min, Pt max) периода вычисляют на основе значения консолидированного периода и значения максимального изменения периода.
5. Способ измерения по п. 4, в котором консолидированный период принимают равным требуемому периоду прямоугольного сигнала, полученному ранее (Pt-1).
6. Способ измерения по п. 4 или 5, в котором с использованием закона (GN1max) максимального градиента скорости вращения получают максимальное значение изменения периода, причем максимальный градиент в данный момент является функцией скорости вращения.
7. Способ измерения по одному из пп. 1-6, в котором во время фазы инициализации измерения, во время которой указанный ряд валидных отсчетов периода не превосходит третье пороговое значение (A3), требуемый период прямоугольного сигнала оценивают с помощью теоретической численной модели периода (Pth).
8. Способ измерения по одному из пп. 1-7, в котором во время фазы инициализации измерения, во время которой отсчеты периода, обнаруженные на прямоугольном сигнале (SC), взаимно рассеяны за пределами предварительно заданного порогового значения (D), требуемый период прямоугольного сигнала оценивают с помощью теоретической численной модели периода (Pth).
9. Способ измерения по п. 7 или 8, в котором требуемый период прямоугольного сигнала определяют во время фазы инициализации с использованием численной модели в зависимости от термодинамических параметров двигателя, предпочтительно выбираемых из значения номинальной мощности каскада высокого давления или значения номинальной характеристики другого вращающегося элемента двигателя, атмосферного давления или регулировки статора компрессора.
10. Блок управления авиационным двигателем, выполненный с возможностью реализовывать следующие этапы, принимая на входе прямоугольный сигнал (SC):
сохранение в памяти кольцевого буфера (B) множества отсчетов (T1,...,Tn) периода прямоугольного сигнала (SC),
сравнение каждого из упомянутых отсчетов с нижним пределом (Pt min) периода и верхним пределом (Pt max) периода, чтобы определить валидные отсчеты, значение которых лежит между этими двумя пределами,
определение требуемого периода (Pt) прямоугольного сигнала (SC) на основе упомянутых валидных отсчетов, если количество определенных валидных отсчетов больше, чем первое пороговое значение (A1); и
если указанное количество валидных отсчетов меньше, чем первое пороговое значение (A1), то определение требуемого периода (Pt) прямоугольного сигнала (SC) следующим образом:
- вычисление множества сумм по меньшей мере двух отсчетов (S12,…,S1n, S23,…,S(n-1)n),
- вычисление среднего значения набора, содержащего ряд валидных отсчетов периода и ряд сумм из указанного множества сумм по меньшей мере двух отсчетов, при этом требуемый период (Pt) прямоугольного сигнала принимается равным упомянутому среднему значению.
| US 2003208329 A1, 06.11.2003 | |||
| US 2007108969 A1, 17.05.2007 | |||
| US 5128973 A, 07.07.1992 | |||
| Способ измерения скорости вращения и устройство для его осуществления | 1983 |
|
SU1103151A1 |

