ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к способу определения крутящего момента и/или угловой скорости вращающегося вала, а также к устройству, обеспечивающему выполнение способа определения согласно изобретению. Данное изобретение относится также к применению способа согласно изобретению для вычисления крутящего момента вала или для вычисления угловой скорости. Настоящее изобретение относится также к валу, снабженному устройством, согласно изобретению.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
При приложении вращающего момента к передаточному валу он подвергается деформации кручения. При известном модуле упругости и постоянной температуре угол кручения пропорционален передаваемому вращающему моменту.
Из уровня техники известны различные способы измерения крутящего момента, в которых используется этот принцип. Описание такого способа измерения крутящего момента вала приведено, например, в DE19817886.
Так, наиболее простым средством для измерения вращающего момента является измерение сдвига фаз между двумя фоническими колесами, каждое из которых установлено на одном конце вала. В этом случае датчик с изменяемым магнитным сопротивлением регистрирует сигнал, представляющий угловое положение каждого из колес. Угловой сдвиг между двумя колесами позволяет распознавать вращающий момент, передаваемый валом.
Однако этот способ измерения не является очень точным, поскольку он очень чувствителен к движениям изгиба вала, а также к внешним помехам (температуре, вибрациям и т.д.).
Для ограничения неточности измерения вращающего момента, другой способ состоит в сближении двух фонических колес с целью ограничения погрешностей, вызванных относительными перемещениями двух фонических колес относительно датчиков. Однако в этом случае нельзя просто сближать два колеса друг с другом, поскольку это приводит к значительному уменьшению чувствительности системы. Таким образом, первое фоническое колесо приближается ко второму колесу с помощью опорной втулки, не передающей вращающий момент, так что первое фоническое колесо жестко соединено с точкой, удаленной от точки, с которой связано второе фоническое колесо. В этом случае два колеса обычно имеют зубья, которые находятся во взаимосвязи друг с другом, и единственный датчик с изменяемым магнитным сопротивлением регистрирует сигнал, который представляет импульс при каждом прохождении одного зуба перед датчиком. Затем обычно выполняется вычисление вращающего момента посредством детектирования прохождения через ноль падающего фронта сигнала и измерения промежутка времени между двумя последовательными падающими фронтами сигнала.
Этот способ позволяет уменьшать неточности измерения вследствие отдаления колес друг от друга. Однако экспериментально установлено, что вычисление вращающего момента сильно подвержено шумам, поскольку этот способ является очень чувствительным к внешним возмущениям, электромагнитным помехам, а также к шумам.
Однако точность и надежность измерения крутящего момента являются крайне важными, поскольку крутящий момент используется затем для вычисления мощности двигателя, к которому относится вал.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩЕСТВА ИЗОБРЕТЕНИЯ
Задачей изобретения является устранение недостатков уровня техники посредством создания способа определения крутящего момента вала, который является более точным, чем в уровне техники.
Другой задачей изобретения является создание способа определения крутящего момента вала, который является мало чувствительным к шумам и внешним возмущениям.
Другой задачей изобретения является создание способа определения крутящего момента вала, который является надежным.
Другой задачей изобретения является создание способа определения угловой скорости вращающегося вала, который является точным и мало зашумленным.
Для этого, согласно первому аспекту изобретения предлагается способ определения крутящего момента и/или угловой скорости вращающегося вала, с помощью:
- одного или нескольких снабженных зубьями колес, при этом каждое колесо жестко соединено с одной точкой вала;
- датчика, способного генерировать импульс аналогового сигнала каждый раз при прохождении перед ним одного зуба;
при этом способ содержит следующие этапы:
- генерирования первого и второго аналогового сигнала с помощью датчика, при этом второй аналоговый сигнал сдвинут во времени относительно первого аналогового сигнала, при этом второй аналоговый сигнал имеет длительность, равную длительности первого аналогового сигнала;
- преобразования первого и второго аналогового сигнала в первый и второй цифровой сигнал;
- вычисления функции взаимной корреляции во времени первого цифрового сигнала со вторым цифровым сигналом;
- вычисления промежутка времени между двумя импульсами первого аналогового сигнала с помощью функции взаимной корреляции.
Способ согласно изобретению отличается, в частности, тем, что определение параметров, таких как крутящий момент вала, не осуществляется больше исходя из одной единственной точки сигнала, а исходя из всего сигнала. Действительно, в противоположность способам, согласно уровню техники, больше не используют лишь точку прохождения через ноль аналогового сигнала, а используют весь сигнал за один оборот или за часть одного оборота. Действительно, весь этот сигнал коррелируют с сигналом последующего оборота или частью последующего оборота, и функция взаимной корреляции позволяет вычислять промежуток времени между двумя импульсами.
Предпочтительно, способ согласно изобретению содержит следующие этапы:
- вычисления крутящего момента вала с помощью промежутка времени между двумя импульсами; или
- вычисления скорости вращения вала с помощью промежутка времени между двумя импульсами.
Поскольку способ согласно изобретению позволяет определять крутящий момент вала, то в способе согласно изобретению используются предпочтительно два колеса, называемые в последующем первым колесом и вторым колесом, при этом первое колесо жестко соединено с первой точкой вала, а второе колесо жестко соединено со второй точкой вала, причем первая точка удалена от второй точки так, что первое колесо и второе колесо обеспечивают возможность регистрации крутящего момента вала.
Предпочтительно, первое и второе колеса расположены так, что зубья первого колеса чередуются с зубьями второго колеса.
Способ согласно изобретению является особенно предпочтительным для вычисления крутящего момента вала. В случае, когда вал снабжен двумя колесами, имеющими чередующиеся зубья, этап вычисления промежутка времени между двумя импульсами является предпочтительно этапом вычисления промежутка времени между двумя последовательными импульсами. Таким образом, этап вычисления промежутка времени между двумя импульсами соответствует этапу вычисления промежутка времени между импульсом n и импульсом n+1. Таким образом, этот этап вычисления промежутка времени между двумя последовательными импульсами физически соответствует угловому сдвигу между первым зубом первого колеса и первым зубом второго колеса. Затем вычисляют крутящий момент, поскольку известна линейная функция, которая связывает крутящий момент и угловой сдвиг между первым зубом первого колеса и первым зубом второго колеса.
Способ согласно изобретению можно также использовать при необходимости для очень точного вычисления скорости вращения вала. В случае, когда вал снабжен двумя колесами, имеющими чередующиеся зубья, этап вычисления промежутка времени между двумя импульсами является предпочтительно этапом вычисления промежутка времени между двумя импульсами, которые соответствуют каждый прохождению двух последовательных зубьев одного и того же колеса. Таким образом, в этом случае этап вычисления промежутка времени между двумя импульсами соответствует этапу вычисления промежутка времени между импульсом n и импульсом n+2.
Согласно одному предпочтительному варианту выполнения этап вычисления промежутка времени между двумя импульсами содержит следующие этапы:
- идентификации максимумов функции взаимной корреляции;
- вычисления моментов времени t1 и t2, в которые функция взаимной корреляции достигает этих максимумов;
- вычисления промежутка времени между этими моментами времени t1 и t2.
Действительно, поскольку осуществляют корреляцию во времени одного сигнала с тем же сигналом, сдвинутым во времени, то максимумы функции взаимной корреляции совпадают во времени с максимумами сигнала. Таким образом, вычисление моментов времени t1 и t2, в которые имеют место максимумы функции взаимной корреляции, позволяет определять моменты времени t1 и t2, в которые имеют место импульсы рассматриваемого аналогового сигнала. И поскольку каждый импульс соответствует прохождению одного зуба перед датчиком, то это позволяет вычислять промежуток времени между двумя прохождениями зубьев.
Вычисление моментов времени t1 и t2, в которые функция взаимной корреляции является максимальной, позволяет очень точно вычислять промежуток времени между двумя прохождениями зубьев перед датчиком. Кроме того, вычисление очень мало чувствительно к внешним возмущениям и шумам за счет интегрирования, реализуемого с помощью взаимной корреляции.
Согласно одному особенно предпочтительному варианту выполнения этап вычисления максимумов функции взаимной корреляции реализуется посредством интерполяции функции взаимной корреляции. Этот способ вычисления является очень точным.
Согласно одному особенно предпочтительному варианту выполнения интерполяция функции взаимной корреляции реализуется с помощью метода параболической интерполяции с использованием метода наименьших квадратов.
Согласно одному предпочтительному варианту выполнения интерполяция функции взаимной корреляции осуществляется лишь в интервалы времени, в которые ожидаются моменты времени t1 и t2.
Действительно, поскольку вал вращается, то приблизительно известно расстояние между зубьями и, следовательно, промежуток времени между прохождениями выбранных зубьев. Следовательно, нет необходимости в интерполяции всей функции взаимной корреляции, поскольку это трудно в вычислении и сложно для вычислительной машины, осуществляющей эту интерполяцию. Таким образом, достаточно интерполировать функцию взаимной корреляции лишь вокруг точек, подлежащих точному определению.
Согласно различным вариантам выполнения:
- первый аналоговый сигнал и второй аналоговый сигнал имеют каждый длительность, равную длительности одного полного оборота вала, или
- первый аналоговый сигнал и второй аналоговый сигнал имеют каждый длительность, равную длительности одной шестой оборота вала,
- первый аналоговый сигнал и второй аналоговый сигнал соответствуют каждый сигналу, генерируемому датчиком в течение двух последовательных оборотов вала;
- первый аналоговый сигнал и второй аналоговый сигнал соответствуют каждый сигналу, генерируемому датчиком во время двух последовательных частей оборота вала, при этом эти части оборота вала предпочтительно равны одной шестой оборота вала, поскольку колеса содержат шесть расположенных на одинаковом расстоянии друг от друга зубьев.
Изобретение относится также к применению способа согласно любому из указанных выше вариантов выполнения для вычисления момента кручения вала.
В этом случае в способе согласно изобретению предпочтительно используются следующие элементы:
- первое и второе колеса, при этом первое колесо жестко соединено с первой точкой вала, а второе колесо жестко соединено со второй точкой вала, причем первая точка вала удалена от второй точки вала, первое и второе колеса снабжены каждое зубьями, при этом зубья первого колеса расположены чередующимся образом относительно зубьев второго колеса;
- датчик, способный преобразовывать прохождение каждого из зубьев первого колеса и второго колеса в импульсы аналогового сигнала;
и способ содержит предпочтительно следующие этапы:
- генерирования первого аналогового сигнала, представляющего импульсы, генерируемые за счет прохождения зубьев перед датчиком во время одного оборота или части оборота вала;
- преобразования первого аналогового сигнала в первый цифровой сигнал;
- генерирования второго аналогового сигнала, представляющего импульсы, генерируемые за счет прохождения зубьев перед датчиком во время следующего оборота или части следующего оборота вала;
- преобразования второго аналогового сигнала во второй цифровой сигнал;
- вычисления функции взаимной корреляции первого цифрового сигнала со вторым цифровым сигналом;
- вычисления промежутка времени между двумя последовательными импульсами первого аналогового сигнала с помощью функции взаимной корреляции;
- вычисления крутящего момента вала исходя из промежутка времени между последовательными импульсами первого аналогового сигнала.
Изобретение относится также к применению способа согласно любому из указанных выше вариантов выполнения для вычисления скорости вращения вала.
Согласно другому аспекту изобретение относится также к устройству для реализации способа согласно изобретению, при этом устройство содержит:
- одно или несколько снабженных зубьями колес, при этом каждое колесо жестко соединено с одной точкой вала,
- датчик, выполненный с возможностью преобразовывать прохождение каждого зуба перед ним в импульсы аналогового сигнала;
- аналого-цифровой преобразователь, выполненный с возможностью преобразовывать выдаваемый датчиком аналоговый сигнал в цифровой сигнал;
- вычислительный блок, предназначенный для вычисления функции взаимной корреляции двух выдаваемых преобразователем цифровых сигналов;
вычисления промежутка времени между двумя последовательными импульсами аналогового сигнала исходя из функции взаимной корреляции.
Предпочтительно, устройство содержит первое и второе колеса.
Предпочтительно, зубья первого колеса расположены чередующимся образом с зубьями второго колеса.
Предпочтительно, аналого-цифровой преобразователь работает с частотой fe дискретизации.
Предпочтительно вычислительный блок вычисляет функцию взаимной корреляции с рабочей частотой, равной частоте fe дискретизации.
Предпочтительно, аналоговые сигналы, выдаваемые датчиком, являются электрическими сигналами.
Предпочтительно, датчик является датчиком с изменяемым магнитным сопротивлением.
Предпочтительно, вычислительный блок выполнен с возможностью интерполировать функцию взаимной корреляции двух цифровых сигналов, выдаваемых преобразователем, предпочтительно с помощью метода параболической интерполяции с использованием метода наименьших квадратов.
Изобретение относится также к валу, снабженному устройством согласно изобретению.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Другие характеристики и преимущества изобретения следуют из приведенного ниже описания со ссылками на прилагаемые чертежи, на которых схематично изображено:
фиг. 1 - вал, снабженный устройством согласно одному варианту выполнения изобретения, в изометрической проекции;
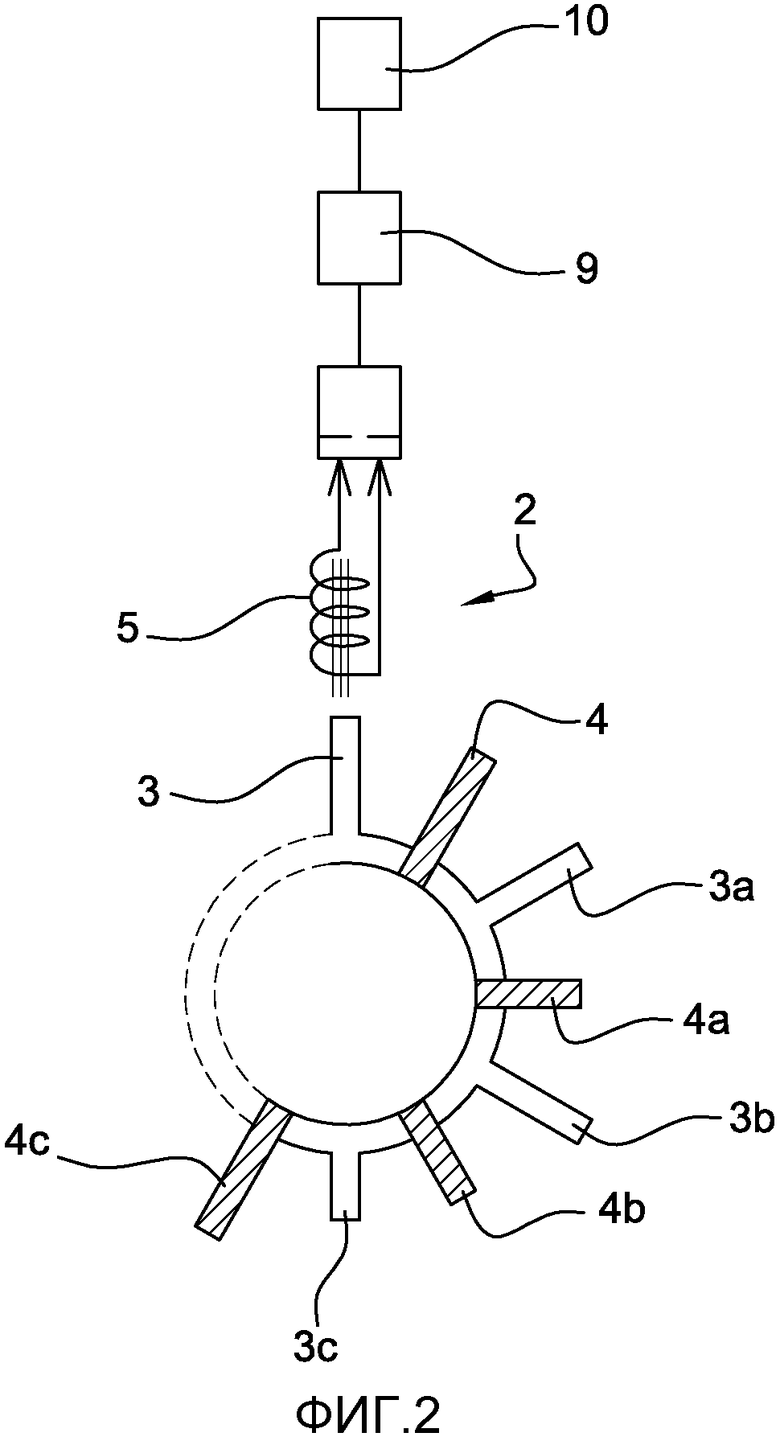
фиг. 2 - поперечный разрез вала и устройства согласно фиг. 1;
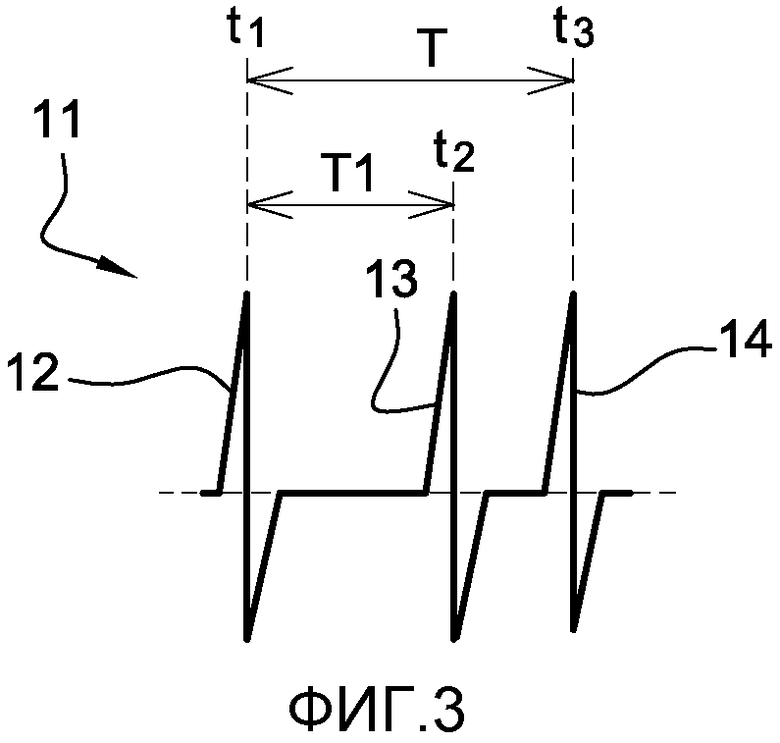
фиг. 3 - первый аналоговый сигнал, полученный с помощью устройства согласно фиг. 1;
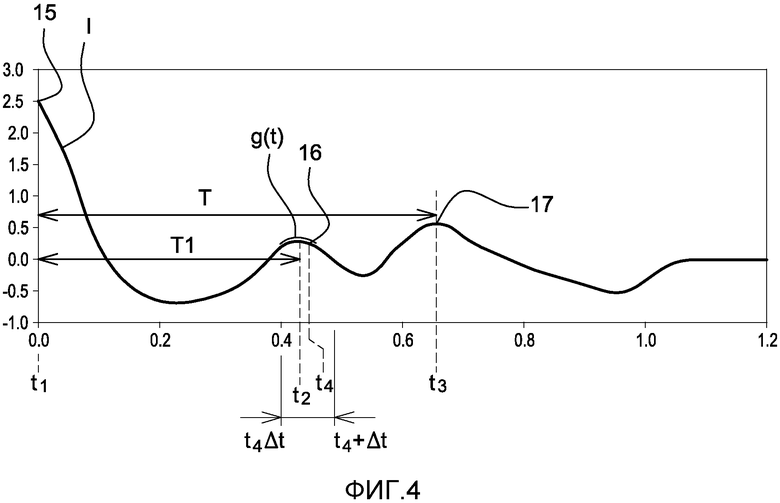
фиг. 4 - функция взаимной корреляции, полученная с помощью устройства согласно фиг. 1;
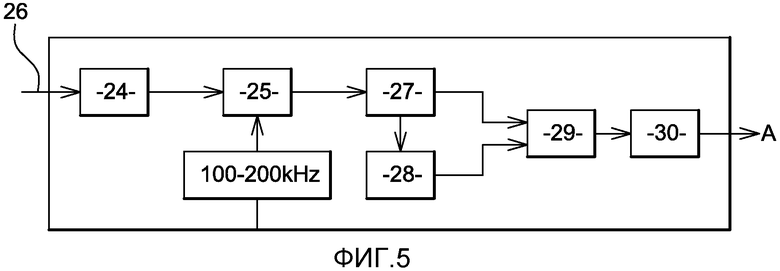
фиг. 5 - вычислительный блок, используемый в устройстве согласно одному варианту выполнения изобретения.
Для большей ясности идентичные или аналогичные элементы обозначены одинаковыми позициями на всех фигурах.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ВОПЛОЩЕНИЯ
На фиг. 1 и 2 показан вал 1, снабженный устройством 2 согласно одному варианту выполнения изобретения. Устройство 2 содержит первое колесо 3 и второе колесо 4. Первое колесо 3 и второе колесо 4 предпочтительно являются фоническими колесами. Первое колесо 3 жестко соединено с первой точкой 6 вала 1. Второе колесо 4 жестко соединено со второй точкой 7 вала 1. Второе колесо 4 соединено со второй точкой 7 через втулку 8, не передающую вращающий момент, так что второе колесо 4 расположено вблизи первого колеса 3, однако жестко соединено с точкой 7, которая удалена от точки 6, с которой жестко соединено первое колесо 3.
Первое и второе колеса 3 и 4 снабжены каждое зубьями, соответственно, 3a, 3b, 3c, … и 4a, 4b, 4c, …. Каждое колесо содержит предпочтительно 6 зубьев 3а-3f и 4а-4f. Зубья первого колеса 3 расположены так, что они чередуются с зубьями второго колеса 4. Таким образом, зуб 3а находится между зубьями 4f и 4а, зуб 3b находится между зубьями 4а и 4b.
Устройство согласно изобретению содержит также датчик 5, расположенный над колесами 3 и 4 так, что он чувствителен к прохождению каждого из зубьев двух колес. Датчик 5 выдает аналоговый сигнал, представляющий импульс, каждый раз при прохождении перед ним одного зуба.
Датчик 5 предпочтительно является датчиком с изменяемым магнитным сопротивлением, который генерирует электрический импульс каждый раз при прохождении одного зуба перед ним.
Устройство 2 содержит также аналого-цифровой преобразователь 9, выполненный с возможностью преобразовывать аналоговый сигнал, выдаваемый датчиком 5, в цифровой сигнал с частотой fe дискретизации. Цифровой сигнал предпочтительно состоит из 12 или 16 бит.
Устройство 2 содержит также вычислительный блок 10, который предназначен для:
- вычисления функции взаимной корреляции двух цифровых сигналов, выдаваемых преобразователем; и
- вычисления промежутка времени между двумя импульсами аналогового сигнала исходя из функции взаимной корреляции.
Ниже приводится описание устройства согласно одному варианту выполнения, со ссылками на фиг. 3 и 4.
На первом этапе датчик 5 создает первый аналоговый сигнал 11, показанный на фиг. 3. В данном примере аналоговый сигнал 11 соответствует сигналу, генерируемому датчиком 5 во время одной шестой оборота вала. Однако можно регистрировать аналоговый сигнал, выдаваемый датчиком во время полного оборота вала, не выходя за рамки изобретения.
Как показано на фиг. 3, первый аналоговый сигнал 11 представляет импульс каждый раз, когда один зуб проходит перед датчиком. Таким образом, первый импульс 12 соответствует прохождению первого зуба 3а первого колеса 3 перед датчиком 5. Под «первым зубом» понимается первый зуб, который проходит перед датчиком, начиная с момента, когда начинается способ согласно изобретению. Этот «первый зуб» не обязательно является абсолютно первым зубом, который проходит перед датчиком. Второй импульс 13 соответствует прохождению первого зуба 4а второго колеса 4 перед датчиком 5. Третий импульс 14 соответствует прохождению второго зуба 3b первого колеса 3 перед датчиком 5.
При постоянном расстоянии между зубьями одного и того же колеса оценка промежутка времени между двумя импульсами, соответствующими двум зубьям одного и того же колеса, позволяет определять скорость вращения вала. Таким образом, оценка промежутка времени Т между импульсами 12 и 14 позволяет определять угловую скорость вала 1.
В противоположность этому, расстояние между зубьями первого колеса 3 и зубьями второго колеса 4 зависит от крутящего момента вала. Следовательно, оценка промежутка времени Т1 между импульсом 12, который соответствует прохождению первого зуба 3а первого колеса, и импульсом 13, который соответствует прохождению первого зуба 4а второго колеса, позволяет определять крутящий момент вала.
Затем первый аналоговый сигнал преобразуют в первый цифровой сигнал. Преобразование первого аналогового сигнала в первый аналоговый сигнал предпочтительно осуществляется с высокой частотой, т.е. с частотой дискретизации, предпочтительно превышающей или равной 100 кГц, предпочтительно равной 200 кГц. После этого первый цифровой сигнал регистрируется.
Затем генерируется второй аналоговый сигнал. Этот второй аналоговый сигнал имеет длительность, равную длительности первого аналогового сигнала, однако сдвинут во времени. Таким образом, когда первый аналоговый сигнал соответствует сигналу, выдаваемому датчиком во время полного оборота вала, то второй аналоговый сигнал предпочтительно соответствует сигналу, выдаваемому датчиком во время следующего оборота вала. В данном случае, поскольку первый аналоговый сигнал соответствует сигналу, выдаваемому датчиком во время одной шестой оборота вала, второй аналоговый сигнал также соответствует сигналу, выдаваемому датчиком во время одной шестой оборота вала. Одна шестая оборота вала, во время которой имеется второй аналоговый сигнал, может быть одной шестой оборота вала, которая следует непосредственно после одной шестой оборота вала, во время которой имеется первый аналоговый сигнал, или же она может быть сдвинута на один оборот или на часть оборота относительно одной шестой оборота вала, во время которой имеется первый аналоговый сигнал.
Таким образом, если первый аналоговый сигнал является сигналом, который соответствует прохождению зубьев 3а, 4а и 3b перед датчиком, то второй аналоговый сигнал может соответствовать либо следующему прохождению зубьев 3а, 4а и 3b перед датчиком, либо прохождению зубьев 4b, 3с, 4с. Когда вал вращается с постоянной скоростью и передает вращающий момент постоянной величины, то второй аналоговый сигнал, следовательно, является, как правило, почти идентичным первому аналоговому сигналу, за исключением сдвига во времени.
Затем второй аналоговый сигнал преобразовывается во второй цифровой сигнал. Преобразование второго аналогового сигнала во второй цифровой сигнал осуществляется с той же частотой дискретизации, что и преобразование первого аналогового сигнала в первый цифровой сигнал. Второй цифровой сигнал регистрируется.
Затем способ согласно изобретению содержит этап, на котором первый цифровой сигнал и второй цифровой сигнал подвергают взаимной корреляции в цифровом виде, предпочтительно с частотой дискретизации, равной частоте, с которой оцифровывались аналоговые сигналы.
Таким образом, если x(k), при изменении k от 1 до n-m, обозначает первый цифровой сигнал, и y(k), при изменении k от 1 до n-m, обозначает второй цифровой сигнал, то функция взаимной корреляции во времени первого и второго цифрового сигнала задана для каждой точки m формулой

где n обозначает полную длительность каждого из цифровых сигналов,
xm - среднюю величину первого цифрового сигнала;
ym - среднюю величину второго цифрового сигнала.
Таким образом, вычисляют функцию взаимной корреляции I(m) для каждой точки m, относящейся к интервалу [0,n]. Полученная таким образом функция I взаимной корреляции показана на фиг. 4.
Как показано на фиг. 4, функция I взаимной корреляции имеет максимум 15, 16, 17 каждый раз, когда первый аналоговый сигнал представляет импульс, соответственно, 12, 13 и 14.
До этого момента способ согласно изобретению идентичен способу, который используется для вычисления скорости вращения вала или для вычисления его крутящего момента. В зависимости от того, используется ли способ согласно изобретению для вычисления крутящего момента или для вычисления угловой скорости, единственное различие следует за этапом вычисления промежутка времени между двумя импульсами, а именно изменяются импульсы, между которыми вычисляют промежуток времени.
Таким образом, когда способ согласно изобретению используется для определения крутящего момента вала, вычисляют промежуток времени между двумя последовательными импульсами, т.е. вычисляют промежуток времени Т1 между импульсами 12 и 13.
В противоположность этому, если использовать способ согласно изобретению для определения угловой скорости вала, то вычисляют промежуток времени Т между импульсами 12 и 14, которые являются двумя импульсами, относящимися к двум последовательным зубьям, принадлежащим одному и тому же колесу.
Ниже приводится подробное описание этапа вычисления промежутка времени между двумя импульсами в случае, когда вычисляют промежуток времени Т1 между двумя импульсами 12 и 13, с целью определения крутящего момента вала. Однако те же этапы вычисления можно использовать для вычисления промежутка времени между импульсами 12 и 14, если необходимо определять угловую скорость вала.
Таким образом, для вычисления промежутка времени Т1 между двумя импульсами, способ согласно изобретению содержит этап вычисления промежутка времени Т1 между максимумами 15 и 16 функции взаимной корреляции.
Согласно одному предпочтительному варианту выполнения изобретения, время t1=0 соответствует на I(t) первому импульсу, т.е. прохождению первого зуба первого колеса перед датчиком. Следовательно, для определения Т1 достаточно знать время t2, в которое функция взаимной корреляции достигает максимума 16, который соответствует импульсу 13, который в свою очередь соответствует прохождению первого зуба второго колеса перед датчиком.
Для определения времени t2 известно, что первый зуб второго колеса проходит перед датчиком после времени t4 порядка одной двенадцатой оборота вала (действительно, каждое колесо содержит шесть зубьев и зубья первого колеса и второго колеса чередуются друг с другом). Таким образом, максимум 16 функции взаимной корреляции следует искать на интервале [t4-Δt, t4+Δt] вокруг t4.
Затем интерполируют функцию I взаимной корреляции предпочтительно посредством параболической интерполяции с использованием метода наименьших квадратов в этом интервале [t4-Δt, t4+Δt]. Например, выполняют поиск функции вида g(t)=at2+bt+c, которая наиболее близка функции I взаимной корреляции. Полученная так функция g(t) показана на фиг. 4. Затем осуществляют поиск точки t, в которой функция g(t) достигает своего максимума.
В данном случае функция g(t) достигает своего максимума при t=t2. Таким образом, промежуток времени Т1 между двумя импульсами 12 и 13 вычисляется по формуле
Т1=t2-t1=t2-0.
Таким образом, способ согласно изобретению позволяет очень точно определять промежуток времени Т1 и тем самым крутящий момент вала, уменьшая автоматически не Гауссовы фазовые шумы сигналов без необходимости использования дополнительных фильтров.
Это точное определение крутящего момента позволяет затем определять мощность, передаваемую валом.
На фиг. 5 показан вычислительный блок, с помощью которого реализуется способ согласно изобретению. Этот вычислительный блок позволяет вычислять мощность системы, передаваемую валом.
Для этого вычислительный блок предпочтительно содержит первый фильтр 24 нижних частот, позволяющий фильтровать аналоговые сигналы, которые проходят через него. Предпочтительно, фильтр 24 обеспечивает также усиление сигналов. Вычислительный блок содержит также аналого-цифровой преобразователь 25 для преобразования отфильтрованного сигнала в цифровой сигнал с частотой fe дискретизации.
Вычислительный блок содержит также память 27 и 28, позволяющую запоминать цифровые сигналы одного оборота или одной шестой оборота во время двух последовательных оборотов или двух последовательных частей оборота.
Вычислительный блок содержит также процессор 2, обеспечивающий возможность взаимной корреляции цифровых сигналов, а также второй процессор 30, обеспечивающий возможность интерполяции функции взаимной корреляции, полученной с помощью процессора 29.
Естественно, что изобретение не ограничивается указанными вариантами выполнения и можно использовать, в частности, другие методы интерполяции функции взаимной корреляции. Можно также использовать другие частоты дискретизации при аналого-цифровом преобразовании.
Кроме того, зубья 3а, 3b и 4а использовались лишь в качестве примера и можно использовать любые другие зубья. Среди прочего, можно также вычислять промежуток времени Т (соответственно, Т1) с помощью двух зубьев 3а и 4а (соответственно, 3а и 3b), затем вычислять с помощью зубьев 3b и 4b (соответственно, 3b и 3с) и усреднять полученные таким образом величины.
Изобретения относятся к измерительной технике и могут быть использованы для измерения крутящего момента и угловой скорости вращающегося вала. Способ содержит этапы генерации первого и второго аналоговых сигналов с помощью датчика, генерирующего сигнал при прохождении перед ним зуба одного или нескольких колес, снабженных зубьями и закрепленных на валу, при этом второй аналоговый сигнал сдвинут во времени относительно первого сигнала и имеет длительность, равную длительности первого аналогового сигнала, преобразования первого и второго сигналов в первый и второй цифровой сигналы. Также он содержит этап корреляции первого и второго цифровых сигналов, и затем вычисляют промежуток времени между двумя прохождениями зубьев посредством интерполяции функции взаимной корреляции с помощью метода наименьших квадратов. Устройство содержит одно или несколько колес, снабженных зубьями, причем каждое колесо жестко соединено с одной точкой вала, датчик, выполненный с возможностью преобразовывать прохождение каждого зуба перед ним в импульсы аналогового сигнала, аналого-цифровой преобразователь, выполненный с возможностью преобразовывать выдаваемый датчиком аналоговый сигнал в цифровой сигнал, вычислительный блок, предназначенный для вычисления функции взаимной корреляции двух цифровых сигналов, выдаваемых аналого-цифровым преобразователем, и вычисления промежутка времени между двумя импульсами аналогового сигнала исходя из функции взаимной корреляции. Технический результат заключается в повышении точности и надежности измерений. 3 н. и 5 з.п. ф-лы, 5 ил. 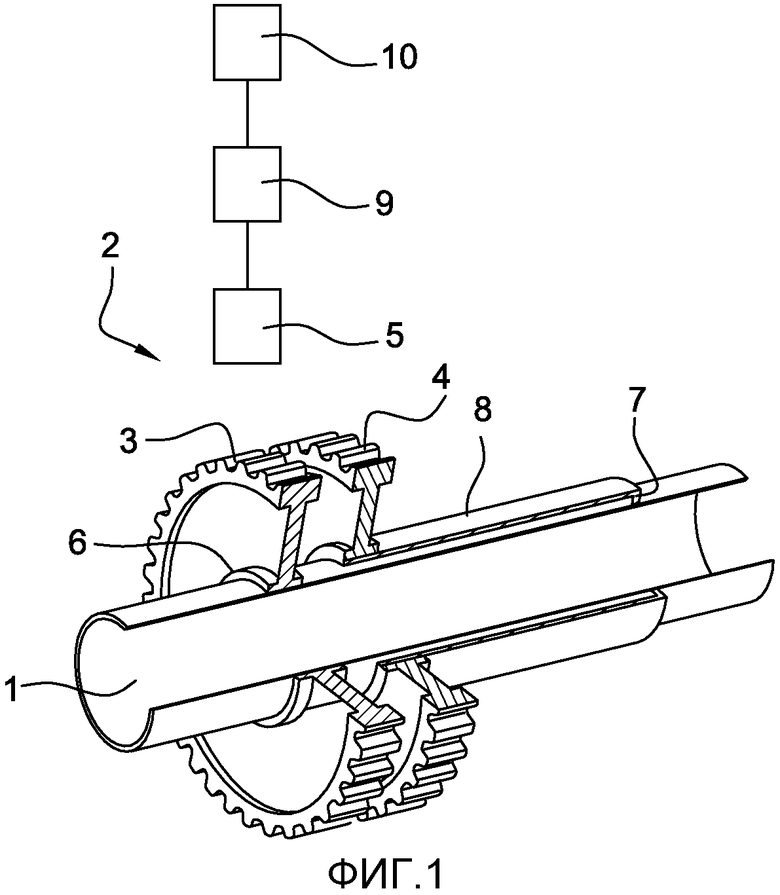
1. Способ определения крутящего момента и/или скорости вращения вала (1) с помощью:
- одного или нескольких колес (3, 4), снабженных зубьями (3a-3f, 4a-4f), при этом каждое колесо (3, 4) жестко соединено с одной точкой (6, 7) вала (1);
- датчика (5), выполненного с возможностью генерировать импульс (12, 13, 14) аналогового сигнала каждый раз при прохождении перед ним одного зуба (3a-3f, 4a-4f);
при этом способ содержит этапы, на которых:
- генерируют первый и второй аналоговый сигнал с помощью датчика, при этом второй аналоговый сигнал сдвинут во времени относительно первого аналогового сигнала, при этом второй аналоговый сигнал имеет длительность, равную длительности первого аналогового сигнала;
- преобразуют первый и второй аналоговый сигнал в первый и второй цифровой сигнал;
- вычисляют функцию взаимной корреляции (I) во времени первого цифрового сигнала со вторым цифровым сигналом;
- вычисляют промежуток времени (T1, Т) между двумя импульсами (12-13, 12-14) первого аналогового сигнала с помощью функции взаимной корреляции (I), при этом этап вычисления промежутка времени между двумя импульсами (12-13, 12-14) содержит следующие подэтапы, на которых:
- идентифицируют максимумы (15, 16 или 15, 17) функции взаимной корреляции;
- вычисляют моменты времени t1 и t2, в которые функция взаимной корреляции достигает своих максимумов, посредством интерполяции функции взаимной корреляции, при этом интерполяцию функции взаимной корреляции осуществляют лишь в интервалы времени [t4-Δt, t4+Δt], в которых ожидаются моменты времени t1 и t2;
- вычисляют промежуток времени (T1, Т) между этими моментами времени t1 и t2.
2. Способ по п.1, в котором используют первое колесо (3) и второе колесо (4), при этом первое колесо (3) жестко соединено с первой точкой (6) вала (1), а второе колесо (4) жестко соединено со второй точкой (7) вала (1), причем первая точка (6) удалена от второй точки (7), первое колесо и второе колесо расположены так, что зубья (3a-3f) первого колеса чередуются с зубьями (4а-4f) второго колеса.
3. Способ по п.1 или 2, отличающийся тем, что интерполяцию функции взаимной корреляции реализуют с помощью метода параболической интерполяции с использованием метода наименьших квадратов.
4. Способ по п.1, отличающийся тем, что первый аналоговый сигнал и второй аналоговый сигнал имеют каждый длительность, равную
- длительности одного полного оборота вала, или
- длительности одной шестой оборота вала.
5. Способ по п.1, отличающийся тем, что первый аналоговый сигнал и второй аналоговый сигнал соответствуют каждый сигналу, генерируемому датчиком в течение двух последовательных оборотов вала или последовательных частей оборота вала.
6. Устройство для реализации способа по любому из пп.1-5, отличающееся тем, что оно содержит:
- одно или несколько колес (3, 4), снабженных зубьями (3a-3f, 4a-4f), причем каждое колесо (3, 4) жестко соединено с одной точкой (6, 7) вала (1),
- датчик (5), выполненный с возможностью преобразовывать прохождение каждого зуба (3a-3f, 4a-4f) перед ним в импульсы (12, 13, 14) аналогового сигнала (11);
- аналого-цифровой преобразователь (9, 25), выполненный с возможностью преобразовывать выдаваемый датчиком (5) аналоговый сигнал в цифровой сигнал;
- вычислительный блок (10, 29, 30), предназначенный для
- вычисления функции (I) взаимной корреляции двух цифровых сигналов, выдаваемых аналого-цифровым преобразователем;
- вычисления промежутка времени (Т1, Т) между двумя импульсами (12, 13, 14) аналогового сигнала исходя из функции (I) взаимной корреляции.
7. Устройство по п.6, отличающееся тем, что оно содержит первое колесо (3) и второе колесо (4), при этом зубья (3a-3f) первого колеса расположены чередующимся образом с зубьями (4a-4f) второго колеса.
8. Вал, снабженный устройством по п.6 или 7.
| DE 19817886 A1 28.10.1999 | |||
| WO 2004067215 A2 12.08.2004; | |||
| ВИБРАЦИОННЫЙ НАСОС | 1998 |
|
RU2133885C1 |
| US 6460422 B1 08.10.2002; | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТНЫХ ХАРАКТЕРИСТИК ДВИГАТЕЛЕЙ | 2006 |
|
RU2325626C1 |
| Измеритель крутящего момента | 1991 |
|
SU1793280A1 |

