Предлагаемое техническое решение относится к области систем управления беспилотными летательными аппаратами (БЛА) и может быть использовано в авиационной и ракетной технике.
Известна система управления БЛА, которая осуществляет формирование траектории, навигацию, управление и стабилизацию ракеты, а также выдачу разовых команд на подсистемы ракеты [Козлов В.И. "Системы автоматического управления летательными аппаратами", М., "Машиностроение", 1979, стр.53, 152], принятая за прототип. Эта система содержит блок управления двигателем, высотомер, гироинерциальную систему с датчиками углового положения ракеты и акселерометрами, датчики угловых скоростей, вычислитель, сумматоры управляющих сигналов тангажа, курса и крена, блок кинематической разводки, содержащий сумматоры первого, второго и третьего рулевых приводов и первый и второй инверторы, и рулевые приводы, при этом гироинерциальная система и высотомер подключены к входам вычислителя, первый, второй и третий выходы которого соединены с первыми входами сумматоров управляющих сигналов каналов тангажа, курса и крена соответственно (причем вторые входы этих сумматоров подключены к выходам соответствующих датчиков углового положения гироинерциальной системы, четвертый выход вычислителя соединен с входом блока управления двигателем летательного аппарата, выходы блока датчиков угловых скоростей соединены с третьими входами сумматоров управляющих сигналов, выход сумматора управляющих сигналов канала курса подключен к входам сумматоров первого и третьего рулевых приводов и через первый инвертор - к входу сумматора второго рулевого привода, выход сумматора управляющих сигналов канала крена соединен с входами сумматоров первого и второго рулевых приводов и через второй инвертор - с входом сумматора третьего рулевого привода, а выходы сумматоров первого, второго и третьего рулевых приводов соединены с входами соответствующих рулевых приводов). Данные признаки совпадают с существенными признаками предлагаемого технического решения.
Такая система управления обеспечивает стабилизацию ракеты относительно центра масс, формирование траектории, в частности, с заданной высотой горизонтального полета и облетом рельефа местности, а также выполнение заданного пространственного и временного графика полета (ПВГП) за счет управления как координатами ракеты в пространстве, так и скоростью ее полета на отдельных участках, заданных поворотными пунктами маршрута (ППМ). Формируются также необходимые разовые команды на подсистемы БЛА.
Однако известная система не дает возможности достаточно эффективно управлять ракетами в случае их применения для проведения учебно-боевых пусков, особенностью управления в которых является необходимость обеспечения безопасности пусков, т.е. падения ракет в заданных пределах полигонов, в том числе и в случае различных отказов подсистем БЛА. Это объясняется отсутствием возможности автономного изменения управления ракетой в случае возникновения аварийной ситуации в полете БЛА, что приводит к необходимости усложнения и удорожания учебно-боевых пусков ракет. Для обеспечения безопасности пусков приходится либо увеличивать размеры полигона, либо использовать самолеты сопровождения.
Предлагаемым техническим решением решается задача повышения эффективности бортовой системы управления (БСУ) ракеты в условиях учебно-боевых пусков, т. е. обеспечение падения ракет в заданных пределах полигонов, в том числе и в случае различных отказов подсистем БЛА.
Такая возможность заложена в том, что основные подсистемы БЛА и его БСУ имеют встроенные системы контроля, информация с которых используется, в частности, при подготовке летательного аппарата к пуску.
Для достижения указанного технического результата в систему управления беспилотным летательным аппаратом, содержащую блок управления двигателем, высотомер, гироинерциальную систему с датчиками углового положения ракеты и акселерометрами, датчики угловых скоростей, вычислитель, сумматоры управляющих сигналов тангажа, курса и крена, блок кинематической разводки, содержащий сумматоры первого, второго и третьего рулевых приводов и первый и второй инверторы, и рулевые приводы (при этом гироинерциальная система и высотомер подключены к входам вычислителя, первый, второй и третий выходы которого соединены с первыми входами сумматоров управляющих сигналов каналов тангажа, курса и крена соответственно, причем вторые входы этих сумматоров подключены к выходам соответствующих датчиков углового положения гироинерциальной системы, четвертый выход вычислителя соединен с входом блока управления двигателем летательного аппарата, выходы блока датчиков угловых скоростей соединены с третьими входами сумматоров управляющих сигналов, выход сумматора управляющих сигналов канала курса подключен к входам сумматоров первого и третьего рулевых приводов и через первый инвертор - к входу сумматора второго рулевого привода, выход сумматора управляющих сигналов канала крена соединен с входами сумматоров первого и второго рулевых приводов и через второй инвертор - с входом сумматора третьего рулевого привода, а выходы сумматоров первого, второго и третьего рулевых приводов соединены с входами соответствующих рулевых приводов), дополнительно введены блоки задержки, запоминающее устройство, компараторы, логический элемент ИЛИ, логические элементы И, блоки определения модуля, блок вычисления производной, блок перемножения, сумматоры, ключ, сумматор сигнала ликвидации и подсистема прекращения полета (причем входы первого и второго блоков задержки соединены, соответственно, со вторым выходом высотомера и седьмым выходом гироинерциальной системы, входы третьего и четвертого блоков задержки и первый вход запоминающего устройства подключены к выходу двигательной установки, выходы первого и второго блоков задержки соединены соответственно с первым и вторым входами логического элемента ИЛИ, выход третьего блока задержки соединен с первым входом второго логического элемента И, запоминающее устройство через последовательно соединенные второй сумматор, ключ и пятый компаратор подключено ко второму входу второго логического элемента И, причем вторые входы запоминающего устройства и второго сумматора соединены с пятым выходом вычислителя, а выход четвертого блока задержки подсоединен к управляющему входу ключа, вход первого компаратора соединен с четвертым выходом вычислителя, а выход этого компаратора подключен к третьему входу второго логического элемента И, вход первого блока определения модуля соединен с шестым выходом вычислителя, а выход этого блока через третий компаратор подсоединен к четвертому входу второго логического элемента И, выход которого подключен к третьему входу логического элемента ИЛИ, входы второго блока определения модуля, блока вычисления производной и первый вход блока перемножения соединены с шестым выходом гироинерциальной системы, выход второго блока определения модуля через последовательно соединенные четвертый компаратор, первый логический элемент И и пятый блок задержки подключен к четвертому входу логического элемента ИЛИ, выход блока вычисления производной через последовательно соединенные блок перемножения и шестой компаратор подсоединен ко второму входу первого логического элемента И, первый и второй входы первого сумматора соединены соответственно с пятым выходом гироинерциальной системы и вторым выходом вычислителя, а выход через последовательно соединенные третий блок определения модуля, седьмой компаратор и шестой блок задержки подключен к пятому входу логического элемента ИЛИ, выход которого через третий логический элемент И и подсистему прекращения полета подключен ко второму входу сумматора сигнала ликвидации, первый вход которого соединен с выходом сумматора управляющих сигналов канала тангажа, а выход со входом сумматоров второго и третьего рулевых приводов, вход второго компаратора подключен к седьмому выходу вычислителя, а выход соединен со вторым входом третьего логического элемента И).
Отличительными признаками предлагаемой системы управления беспилотным летательным аппаратом являются наличие блоков задержки, запоминающего устройства, компараторов, логических элементов ИЛИ, логических элементов И, блоков определения модуля, блока вычисления производной, блока перемножения, сумматоров, ключа, сумматора сигнала ликвидации и подсистемы прекращения полета, а также то, что входы первого и второго блоков задержки соединены, соответственно, со вторым выходом высотомера и седьмым выходом гироинерциальной системы, входы третьего и четвертого блоков задержки и первый вход запоминающего устройства подключены к выходу двигательной установки, выходы первого и второго блоков задержки соединены соответственно с первым и вторым входами логического элемента ИЛИ, выход третьего блока задержки соединен с первым входом второго логического элемента И, запоминающее устройство через последовательно соединенные второй сумматор, ключ и пятый компаратор подключено ко второму входу второго логического элемента И, причем вторые входы запоминающего устройства и второго сумматора соединены с пятым выходом вычислителя, а выход четвертого блока задержки подсоединен к управляющему входу ключа, вход первого компаратора соединен с четвертым выходом вычислителя, а выход этого компаратора подключен к третьему входу второго логического элемента И, вход первого блока определения модуля соединен с шестым выходом вычислителя, а выход этого блока через третий компаратор подсоединен к четвертому входу второго логического элемента И, выход которого подключен к третьему входу логического элемента ИЛИ, входы второго блока определения модуля, блока вычисления производной и первый вход блока перемножения соединены с шестым выходом гироинерциальной системы, выход второго блока определения модуля через последовательно соединенные четвертый компаратор, первый логический элемент И и пятый блок задержки подключен к четвертому входу логического элемента ИЛИ, выход блока вычисления производной через последовательно соединенные блок перемножения и шестой компаратор подсоединен ко второму входу первого логического элемента И, первый и второй входы первого сумматора соединены соответственно с пятым выходом гироинерциальной системы и вторым выходом вычислителя, а выход через последовательно соединенные третий блок определения модуля, седьмой компаратор и шестой блок задержки подключен к пятому входу логического элемента ИЛИ, выход которого через третий логический элемент И и подсистему прекращения полета подключен ко второму входу сумматора сигнала ликвидации, первый вход которого соединен с выходом сумматора управляющих сигналов канала тангажа, а выход со входом сумматоров второго и третьего рулевых приводов, вход второго компаратора подключен к седьмому выходу вычислителя, а выход соединен со вторым входом третьего логического элемента И.
Благодаря наличию указанных отличительных признаков в совокупности с известными (указанными в ограничительной части формулы), достигается следующий технический результат - при проведении учебно-боевых пусков в случае возникновения нештатной ситуации, в том числе и в случае различных отказов подсистем БЛА, реализуется автономная логика выявления и анализа отказов подсистем летательного аппарата, что приводит к повышению безопасности проведения пусков, а именно, к снижению вероятности нарушения заданных границ полигонов, исключению возможных ошибок человека-оператора в определении аварийной ситуации (при использовании самолетов сопровождения), к снижению стоимости проведения учебно-боевых пусков за счет отказа от применения самолетов сопровождения и уменьшения потребных размеров полигона.
В результате поиска по источникам патентной и научно-технической информации, решений, содержащих аналогичные признаки, не обнаружено. Таким образом, можно сделать заключение о том, что предложенное устройство не известно из уровня техники и, следовательно, соответствует критерию охраноспособности - "новое".
На основании сравнительного анализа предложенного решения с известным уровнем техники по источникам научно-технической и патентной информации можно утверждать, что между совокупностью признаков, в том числе отличительных, выполняемых ими функциями и достигаемой целью наблюдается неочевидная причинно-следственная связь. На основании вышеизложенного можно сделать вывод о том, что предложенное решение не следует явным образом из уровня техники и, следовательно, соответствует критерию охраноспособности "изобретательский уровень".
Предложенное техническое решение может найти применение в области авиации, в частности конструкции беспилотных летательных аппаратов, при использовании которых необходимо обеспечить их самоуничтожение в нештатных ситуациях, например в случае отказа систем летательного аппарата или необходимости ограничения дальности полета в пределах заданного полигона.
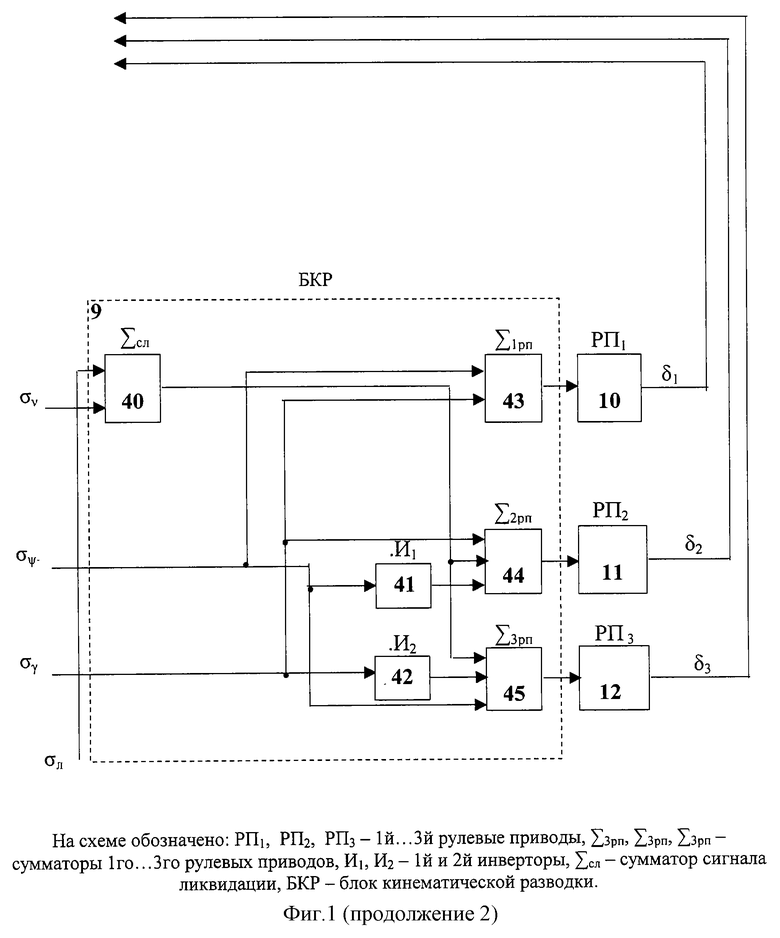
Схема предлагаемой системы приведена на фиг.1. Представленная на ней система управления беспилотным летательным аппаратом содержит блок управления двигателем (1), высотомер (2), а также гироинерциальную систему (3) и блок датчиков угловых скоростей (4), причем выходы гироинерциальной системы (3) и высотомера (2) подключены к входам вычислителя (5), первый, второй и третий выходы которого соединены с первыми входами сумматоров управляющих сигналов каналов тангажа (6), курса (7) и крена (8) соответственно. Вторые входы этих сумматоров подключены к выходам соответствующих датчиков углового положения гироинерциальной системы (3). Четвертый выход вычислителя (5) соединен с блоком управления двигателем (1) летательного аппарата. Выходы датчиков угловых скоростей (4) соединены с третьими входами сумматоров управляющих сигналов (6), (7), (8). Выходы сумматоров управляющих сигналов каналов курса и крена подключены к входам сумматоров первого, второго и третьего рулевых приводов (43), (44), (45) и входам первого и второго инверторов (41), (42), подключенных к входам сумматоров второго и третьего рулевых приводов. Сумматоры рулевых приводов и инверторы в совокупности представляют собой блок кинематической разводки (9). Выходы сумматоров рулевых приводов соединены с входами соответствующих рулевых приводов (10), (11), (12).
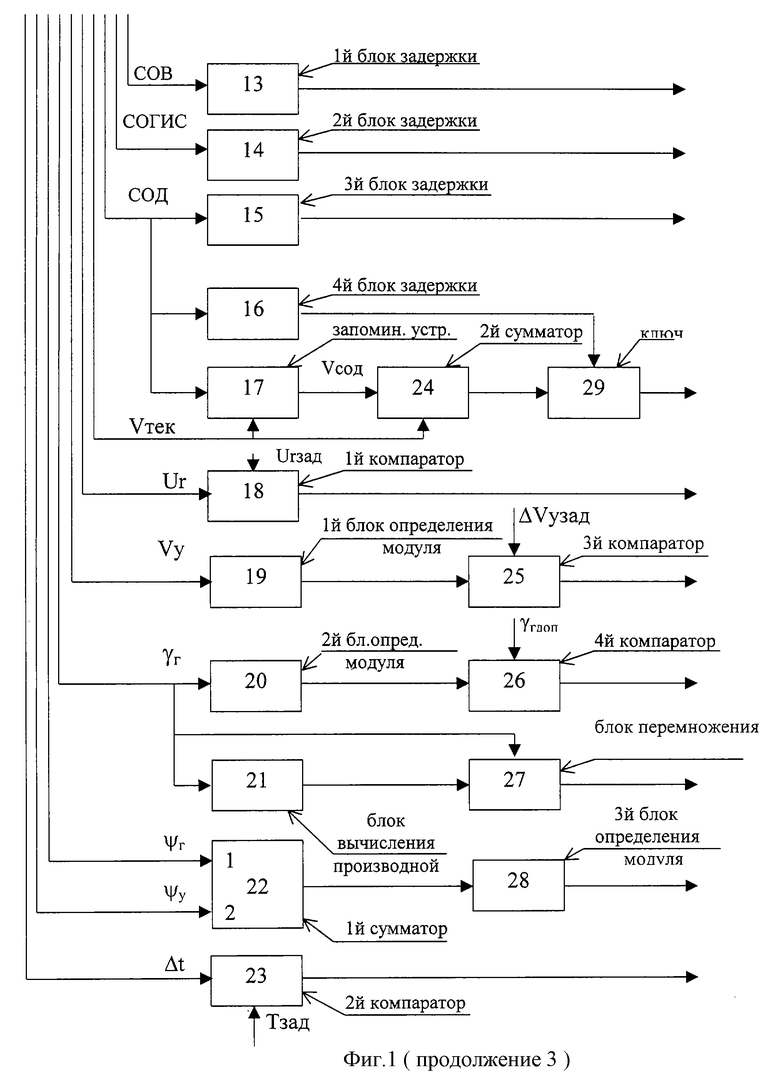
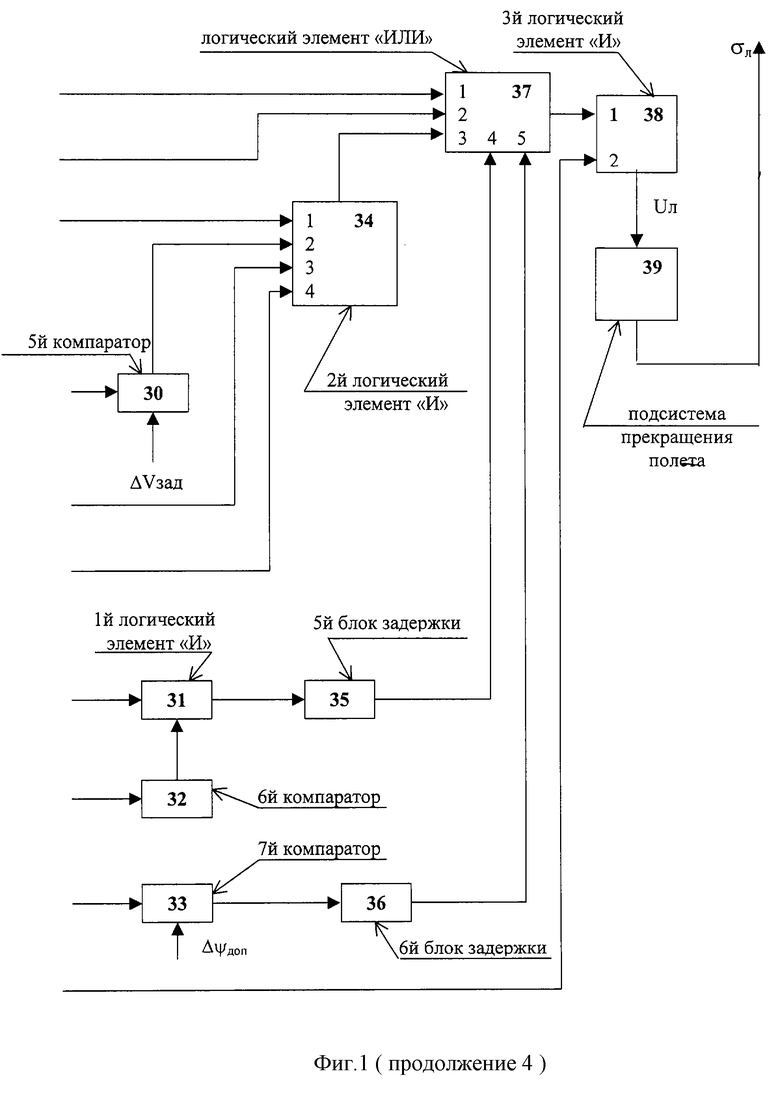
В систему дополнительно введены подсистема формирования признака отказа (на схеме не обозначена), содержащая блоки задержки (13-16), (35), (36), запоминающее устройство (17), компараторы (18), (23), (25), (26), (30), (32), (33), блоки определения модуля (19), (20), (28), блок вычисления производной (21), сумматоры (22), (24), блок перемножения (27), ключ (29), логические элементы И (31), (34), (38), логический элемент ИЛИ (37), подсистема прекращения полета (39) и сумматор сигнала ликвидации (40). При этом входы первого (13) и второго (14) блоков задержки соединены, соответственно, со вторым выходом высотомера (2) и седьмым выходом гироинерциальной системы (3), входы третьего (15) и четвертого (16) блоков задержки и первый вход запоминающего устройства (17) подключены к выходу блока управления двигателем (1). Выходы первого (13) и второго (14) блоков задержки подключены к первому и второму входам логического элемента ИЛИ (37). Выход третьего блока задержки (15) соединен с первым входом второго логического элемента И (34); запоминающее устройство (17) через последовательно соединенные второй сумматор (24), ключ (29) и пятый компаратор (30) подключено ко второму входу второго логического элемента И (34), причем вторые входы запоминающего устройства (17) и второго сумматора (24) соединены с пятым выходом вычислительного устройства (5), выход четвертого блока задержки (16) подсоединен к управляющему входу ключа (29), вход первого компаратора (18) соединен с четвертым выходом вычислительного устройства (5), а выход этого компаратора (18) подключен к третьему входу второго логического элемента И (34). Вход первого блока определения модуля (19) соединен с шестым выходом вычислительного устройства (5), а выход этого блока через третий компаратор (25) подсоединен к четвертому входу второго логического элемента И (34), выход которого подключен к третьему входу логического элемента ИЛИ (37). Входы второго блока определения модуля (20), блока вычисления производной (21) и первый вход блока перемножения (27) соединены с шестым выходом гироинерциальной системы (3); выход второго блока определения модуля (20) через последовательно соединенные четвертый компаратор (26), первый логический элемент И (31) и пятый блок задержки (35) подключен к четвертому входу логического элемента ИЛИ (37), выход блока вычисления производной (21) через последовательно соединенные блок перемножения (27) и шестой компаратор (32) подсоединен ко второму входу первого логического элемента И (31). Первый и второй входы первого сумматора (22) соединены соответственно с пятым выходом гироинерциальной системы (3) и вторым выходом вычислителя (5), а выход через последовательно соединенные третий блок определения модуля (28), седьмой компаратор (33) и шестой блок задержки (36) подключен к пятому входу логического элемента ИЛИ (37), выход которого через последовательно соединенные третий логический элемент И (38) и подсистему прекращения полета (39) подключен ко второму входу сумматора сигнала ликвидации (40), первый вход которого соединен с выходом сумматора управляющих сигналов канала тангажа (6), а выход - с входами сумматоров второго (44) и третьего (45) рулевых приводов блока кинематической разводки (9); вход второго компаратора (23) подключен к седьмому выходу вычислителя (5), а выход соединен со вторым входом третьего логического элемента И (38).
На фиг.1 обозначено:
СОВ - сигнал отказа высотомера;
СОГИС - сигнал отказа гироинерциальной системы;
СОД - сигнал отказа двигателя;
Нп - сигнал высотомера;
νг - сигнал тангажа с ГИС;
ψг - - сигнал крена с ГИС;
γг - - сигнал курса с ГИС;
х - линейное ускорение по оси х ГИС;
у - линейное ускорение по оси у ГИС;
z - линейное ускорение по оси z ГИС;
ν - угловая скорость по тангажу;
ψ - угловая скорость по курсу;
γ - угловая скорость по крену;
νy - управляющий сигнал по углу тангажа;
ψy - управляющий сигнал по углу курса;
γy - управляющий сигнал по углу крена;
Ur - сигнал управления тягой двигателя;
Uл - команда ликвидации летательного аппарата;
σv - управляющий сигнал по каналу тангажа;
σψ - управляющий сигнал по каналу курса;
σγ - управляющий сигнал по каналу крена;
σл - сигнал управления при ликвидации летательного аппарата;
σ1,σ2,σ3 - управляющие сигналы первого....третьего рулей;
δ1,δ2,δ3 - углы отклонения первого....третьего рулей;
Urзад - заданное значение сигнала управления тягой двигателя;
Vтек - текущее значение скорости полета;
Vсод - значение скорости в момент поступления сигнала СОД;
Vy - текущее значение вертикальной скорости БЛА;
ΔVзад - заданное допустимое рассогласование по скорости;
ΔVузад - заданное допустимое рассогласование по вертикальной скорости;
Δψдоп - заданный допустимый угол рассогласования по курсу;
γдоп - заданный допустимый угол рассогласования по крену;
Δt - оставшееся время полета до цели;
Тзад - заданное время.
Предлагаемая система функционирует следующим образом. Датчики информационной обстановки (2)...(4) обеспечивают измерение углов (νг,ψг,γ), угловых скоростей (ν,ψ,γ), линейных ускорений (х, у, z), а также высоты полета БЛА (Нп). На основании этих данных, а также заданных координат ППМ и времени полета на отдельных участках маршрута, вычислитель БСУ (5) формирует, в соответствии с заложенными в нем алгоритмами, управляющие сигналы по углам тангажа νy, курса ψy и крена γy на входах сумматоров (6)...(8), а также сигналы на запуск, останов и регулирование тяги двигательной установки Ur. Сумматоры управляющих сигналов каналов тангажа (6), курса (7) и крена (8), складывая разности сигналов (νг-νy),(ψг-ψy),(γг-γy), умноженные на соответствующие позиционные передаточные числа, с сигналами ν,ψ,γ, умноженными на передаточные числа по демпфирующим сигналам, формируют поканальные управляющие сигналы σν,σψ,σγ. Блок кинематической разводки (9) распределяет эти сигналы по рулевым приводам (10), (11), (12) в соответствии со схемой расположения рулевых поверхностей на летательном аппарате (на фиг.1 для примера приведена схема управления ракетой с тремя рулями).
Функционирование подсистемы формирования признака отказа состоит в следующем.
На входы первого (13) и второго (14) блоков задержки подаются, соответственно, сигналы отказов информационных датчиков - высотомера (2) (СОВ) и гироинерциальной системы (3)(СОГИС), а на входы блоков задержки (15), (16), а также на первый вход запоминающего устройства (17) - сигнал отказа двигателя (СОД); эти сигналы формируются средствами встроенного контроля соответствующих подсистем. Сигналы СОД, например, формируются системой встроенного контроля двигателя по факту снижения оборотов ротора ниже некоторого наперед заданного значения или снижения давления в камере сгорания и т.п.
Времена задержки tзад в блоках задержки (13)...(16) задаются из условия сохранения приемлемого уровня точности навигации, а также обеспечения безопасности пусков. Для блока (13), например, tзад13 выбирается с учетом протяженности участков возможной постановки помех радиовысотомеру БЛА при выполнении соответствующего учебно-боевого задания. Для блока (15) время задержки tзад15 назначается исходя из допустимого времени работы подсистем БЛА на резервном источнике энергии при отказе двигателя. Для блока (16) время задержки tзад16 выбирается как величина интервала, на котором производится оценка изменения скорости полета БЛА после формирования сигнала СОД; очевидно, целесообразно задавать tзад16<tзад15.
Выходные сигналы блоков задержки (13), (14) поступают на 1-й и 2-й входы логического элемента ИЛИ (37); выходной сигнал блока задержки (15) поступает на первый вход второго логического элемента И (34), а блока задержки (16) - на управляющий вход ключа (29).
На второй вход запоминающего устройства (17), а также на второй вход второго сумматора (24) поступает сигнал текущей скорости полета БЛА Vтек, определяемый в вычислителе (5). В момент поступления СОД запоминающее устройство (17) фиксирует скорость Vсод полета, и эта величина поступает в сумматор (24), где осуществляется вычисление величины ΔVсод=Vсод-Vтек.
По срабатыванию блока задержки (16) ключ (29) коммутирует выход сумматора (24) с первым входом пятого компаратора (30), на второй вход которого подана постоянная величина ΔVзад. При выполнении условия ΔVсод>ΔVзад, означающего, что тяги двигателя недостаточно для продолжения полета, на второй вход второго логического элемента И (34) поступает сигнал от компаратора (30).
Первый компаратор (18) производит сравнение текущего значения управляющего сигнала Ur, подаваемого на двигатель из системы управления БЛА, с заданным значением Uзад. При выполнении условия
Ur>Urзад,
означающего, что снижение оборотов и тяги двигателя происходит вопреки управляющему сигналу Ur, сигнал с выхода компаратора (18) поступает на третий вход второго логического элемента И (34).
Сигнал вертикальной скорости БЛА Vу из вычислителя (5) через последовательно соединенные первый блок определения модуля (19) и третий компаратор (25) поступает на четвертый вход логического элемента И (34). На второй вход компаратора (25) подается заданное постоянное значение Vузад, так что сигнал на четвертом входе логического элемента (34) появляется при выполнении условия
|Vy|<ΔVyзад,
означающего, что БЛА не совершает маневра в вертикальной плоскости.
Выход второго логического элемента И (34) соединен с третьим входом логического элемента ИЛИ (37). Таким образом, по сигналу "отказ двигателя" команда на ликвидацию БЛА сформируется только при одновременном выполнении следующих условий:
- после поступления СОД истекло время не менее tзад15;
- скорость полета БЛА уменьшилась не менее чем на заданную величину ΔVзад за заданное время tзад16;
- существенный маневр БЛА в вертикальной плоскости отсутствует;
- управляющий сигнал Ur на двигатель от системы управления БЛА более некоторого заданного значения Urзад.
Описанная цепь элементов обеспечивает выдачу команды на прекращение полета БЛА при отказе двигателя только при подтверждении СОД физическими параметрами движения, что дает возможность продолжения полета при ложной выдаче СОД.
На вход второго блока определения модуля (20), выход которого через четвертый компаратор (26) соединен с первым входом первого логического элемента И (31), на вход блока вычисления производной (21), выход которого соединен с первым входом блока перемножения (27), и на второй вход блока перемножения (27) подается сигнал крена γг, измеренный гироинерциальной системой (3) БСУ. Выход блока перемножения (27) соединен с первым входом шестого компаратора (32), на второй вход которого подается постоянный нулевой сигнал, а выход подключен ко второму входу первого логического элемента И (31). Выход логического элемента И (31) через пятый блок задержки (35) соединен с четвертым входом логического элемента ИЛИ (37). При этом на второй вход четвертого компаратора (26) поступает сигнал заданного допустимого угла крена γдоп.
Описанная цепь элементов обеспечивает выдачу команды на прекращение полета БЛА при наличии установившегося вращения его по крену, т.е. при совместном выполнении следующих условий:
|γг|>γдоп;
sign(γг•γг)>0,
если время вращения по крену превышает допустимое Δtγ>t35.
На входы первого сумматора (22) подаются сигналы гироскопического угла курса ψг, измеренного ГИС, и сигнал управления по углу курса ψy, формируемый системой управления.
Выход сумматора (22) через последовательно соединенные третий блок вычисления модуля (28), седьмой компаратор (33) и шестой блок задержки (36) соединен с пятым входом логического элемента ИЛИ (37). При этом на второй вход компаратора (33) поступает сигнал заданного допустимого угла рассогласования по курсу 
Эта цепь обеспечивает выдачу команды на прекращение полета, если БЛА потерял управляемость по курсу, т.е. рассогласование по курсу превышает допустимое
|ψг-ψy|>Δψдоп.
и время нарушения управляемости по курсу превышает допустимое
Δtψ>t36.
Выходной сигнал логического элемента ИЛИ (37) поступает на первый вход третьего логического элемента И (38); выходной сигнал второго компаратора (23), производящего сравнение оставшегося до завершения полета времени Δt, рассчитываемого в вычислителе (5), с заданным значением времени Тзад, поступает на второй вход третьего логического элемента И (38).
Таким образом, при определении аварийной ситуации (отказов в системах БЛА) в соответствии с реализованным в предлагаемой системе управления алгоритмом на выходе третьего логического элемента И (38) формируется команда ликвидации Uл, поступающая на вход подсистемы прекращения полета (39).
Подсистема прекращения полета (39) формирует сигнал ликвидации σл, обеспечивающий перевод БЛА в пикирование. Таким образом, летательный аппарат разрушается при встрече с поверхностью земли в зоне падения, разрешенной для проведения учебно-боевых пусков.
Описанная система обеспечивает принудительное прекращение полета в случае, если отказы двигателя БЛА или его информационных подсистем имеют место в течение отрезков времени, больших заданных tзадi, при оставшемся времени полета более наперед заданного на втором компараторе (23) Тзад.
Если указанные отказы снимаются в течение соответствующего разрешенного интервала времени (Δti<tзадi), или, если оставшееся время полета менее наперед заданного Тзад, то полет БЛА к цели продолжается.
Все семь компараторов, введенные в предложенной системе, предназначены для сравнения сигналов, изменяющихся во времени, с константами, задаваемыми перед введением системы в действие - например, перед запуском БЛА. Устройство таких компараторов, а также подсистемы прекращения полета известно и не является предметом изобретения в данной заявке.
Предлагаемая система может быть реализована на базе бортовой цифровой вычислительной машины. В этом случае реализация вновь вводимых элементов осуществляется наиболее просто, на базе стандартных вычислительных модулей.
Изобретение относится к области систем управления беспилотными летательными аппаратами (БЛА) и может быть использовано в авиационной и ракетной технике. Технический результат заключается в повышении эффективности бортовой системы управления БЛА в условиях учебно-боевых пусков, т.е. в обеспечении падения летательного аппарата в заданных пределах полигонов, в том числе и в случае различных отказов подсистем БЛА. Система управления беспилотным летательным аппаратом содержит блок управления двигателем, высотомер, гироинерциальную систему с датчиками углового положения ракеты и акселерометрами, датчики угловых скоростей, вычислитель, сумматоры управляющих сигналов тангажа, курса и крена, блок кинематической разводки, содержащий сумматоры рулевых приводов и инверторы, рулевые приводы, блоки задержки, запоминающее устройство, компараторы, логический элемент ИЛИ, логические элементы И, блоки определения модуля, блок вычисления производной, блок перемножения, сумматоры, ключ, сумматор сигнала ликвидации и подсистемы прекращения полета. 4 ил.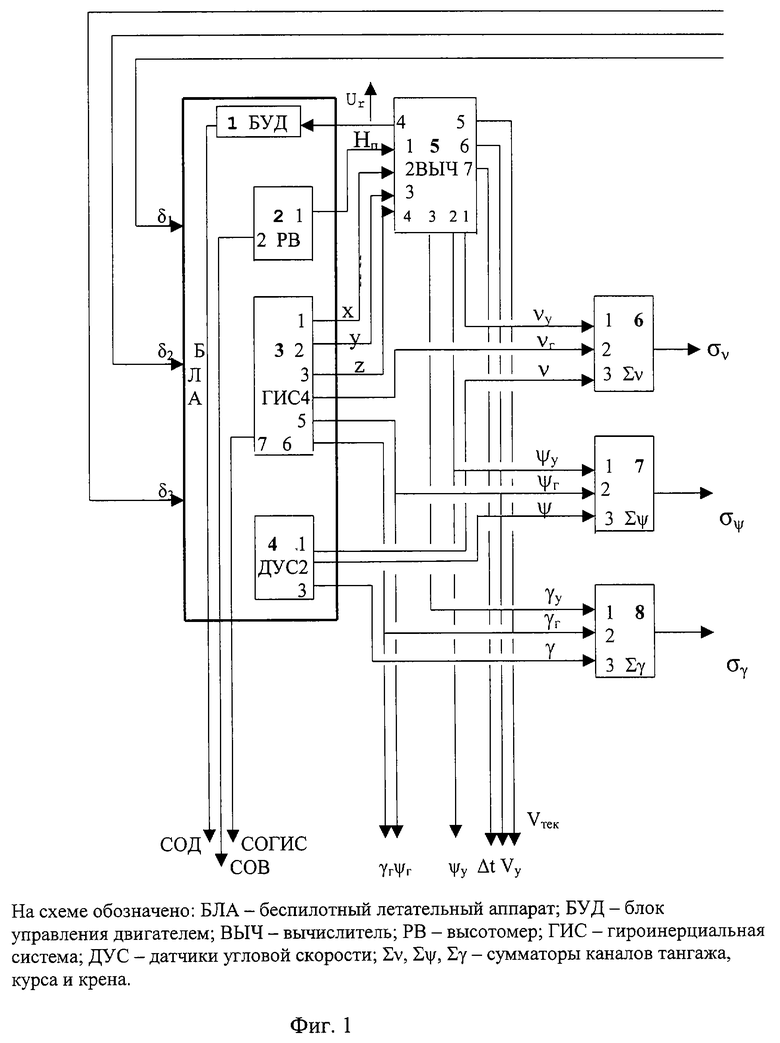
Система управления беспилотным летательным аппаратом, содержащая блок управления двигателем, высотомер, гироинерциальную систему с датчиками углового положения ракеты и акселерометрами, датчики угловых скоростей, вычислитель, сумматоры управляющих сигналов тангажа, курса и крена, блок кинематической разводки, содержащий сумматоры первого, второго и третьего рулевых приводов и первый и второй инверторы, и рулевые приводы, при этом гироинерциальная система и высотомер подключены к входам вычислителя, предназначенного для формирования управляющих сигналов по углам тангажа, курса и крена, а также сигналов на запуск, останов и регулирование тяги двигателя, первый, второй и третий выходы вычислителя соединены с первыми входами сумматоров управляющих сигналов каналов тангажа, курса и крена соответственно, причем вторые входы этих сумматоров подключены к выходам соответствующих датчиков углового положения гироинерциальной системы, четвертый выход вычислителя соединен с входом блока управления двигателем летательного аппарата, выходы блока датчиков угловых скоростей соединены с третьими входами сумматоров управляющих сигналов, выход сумматора управляющих сигналов канала курса подключен к входам сумматоров первого и третьего рулевых приводов и через первый инвертор к входу сумматора второго рулевого привода, выход сумматора управляющих сигналов канала крена соединен с входами сумматоров первого и второго рулевых приводов и через второй инвертор с входом сумматора третьего рулевого привода, а выходы сумматоров первого, второго и третьего рулевых приводов соединены с входами соответствующих рулевых приводов, отличающаяся тем, что в нее дополнительно введены блоки задержки, запоминающее устройство, компараторы, логический элемент ИЛИ, логические элементы И, блоки определения модуля, блок вычисления производной, блок перемножения, сумматоры, ключ, сумматор сигнала ликвидации и подсистема прекращения полета, причем вычислитель дополнительно формирует сигналы текущей скорости полета, вертикальной скорости полета и оставшегося до завершения полета времени, входы первого и второго блоков задержки соединены соответственно со вторым выходом высотомера и седьмым выходом гироинерциальной системы, входы третьего и четвертого блоков задержки и первый вход запоминающего устройства подключены к выходу блока управления двигателем, выходы первого и второго блоков задержки соединены соответственно с первым и вторым входами логического элемента ИЛИ, выход третьего блока задержки соединен с первым входом второго логического элемента И, запоминающее устройство через последовательно соединенные второй сумматор, ключ и пятый компаратор подключено ко второму входу второго логического элемента И, причем вторые входы запоминающего устройства и второго сумматора соединены с пятым выходом вычислителя, а выход четвертого блока задержки подсоединен к управляющему входу ключа, вход первого компаратора соединен с четвертым выходом вычислителя, а выход этого компаратора подключен к третьему входу второго логического элемента И, вход первого блока определения модуля соединен с шестым выходом вычислителя, а выход этого блока через третий компаратор подсоединен к четвертому входу второго логического элемента И, выход которого подключен к третьему входу логического элемента ИЛИ, входы второго блока определения модуля, блока вычисления производной и первый вход блока перемножения соединены с шестым выходом гироинерциальной системы, выход второго блока определения модуля через последовательно соединенные четвертый компаратор, первый логический элемент И и пятый блок задержки подключен к четвертому входу логического элемента ИЛИ, выход блока вычисления производной через последовательно соединенные блок перемножения и шестой компаратор подсоединен ко второму входу первого логического элемента И, первый и второй входы первого сумматора соединены соответственно с пятым выходом гироинерциальной системы и вторым выходом вычислителя, а выход через последовательно соединенные третий блок определения модуля, седьмой компаратор и шестой блок задержки подключен к пятому входу логического элемента ИЛИ, выход которого через третий логический элемент И и подсистему прекращения полета подключен ко второму входу сумматора сигнала ликвидации, первый вход которого соединен с выходом сумматора управляющих сигналов канала тангажа, а выход со входом сумматоров второго и третьего рулевых приводов, вход второго компаратора подключен к седьмому выходу вычислителя, а выход соединен со вторым входом третьего логического элемента И.
| КОЗЛОВ В.И | |||
| Системы автоматического управления летательными аппаратами | |||
| -М.: Машиностроение, 1979, с.53 и 152 | |||
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2062503C1 |
| СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТА ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1999 |
|
RU2151714C1 |
| US 4821982 А, 18.04.1989 | |||
| US 4775116 А, 04.10.1988. | |||

