Изобретение относится к области автомобилестроения, а именно к транспортным средствам повышенной проходимости.
Из предшествующего уровня техники известен аналог (прототип) заявленного изобретения, как наиболее близкий ему по совокупности существенных признаков.
Прототип представлен в описании полезной модели к патенту RU №89030 "Вездеходное транспортное средство и лебедка для этого средства" и представляет вездеходное транспортное средство, содержащее кабину и механизм для его перемещения посредством наматывания намоточным барабаном троса, свободный конец которого соединен с механическим средством его закрепления к неподвижному объекту.
Недостатком описанного в прототипе вездеходного транспортного средства является ограниченность его применения в затрудненных условиях применения лебедки, когда нет возможности закрепления свободного конца троса к неподвижному объекту без помощи водителю транспортного средства извне. Особенно остро этот недостаток проявляется при застревании в ходе преодоления достаточно глубоких водных преград, а также в условиях Арктики.
Задачей, на решение которой направлено изобретение, является создание такого вездеходного транспортного средства, которое без посторонней помощи его водителю могло бы с помощью лебедки производить самовытаскивание.
Поставленная задача решается за счет того, что в вездеходном транспортном средстве, содержащем кабину и механизм для его перемещения посредством наматывания намоточным барабаном троса, свободный конец которого соединен с механическим средством его закрепления к неподвижному объекту, механическое средство содержит механизм, предназначенный для его автоматического закрепления к неподвижному объекту, при этом само механическое средство соединено с воздушным дроном, пульт управления которым расположен в кабине вездеходного транспортного средства.
Технический результат изобретения состоит в техническом эффекте исключающем необходимость в сторонней помощи водителю вездеходного транспортного средства при его застревании.
Другие особенности и преимущества данного изобретения будут ясны из подробного описания, а также из пунктов 1-3 формулы изобретения.
Изобретение поясняется прилагаемыми чертежами, на которых:
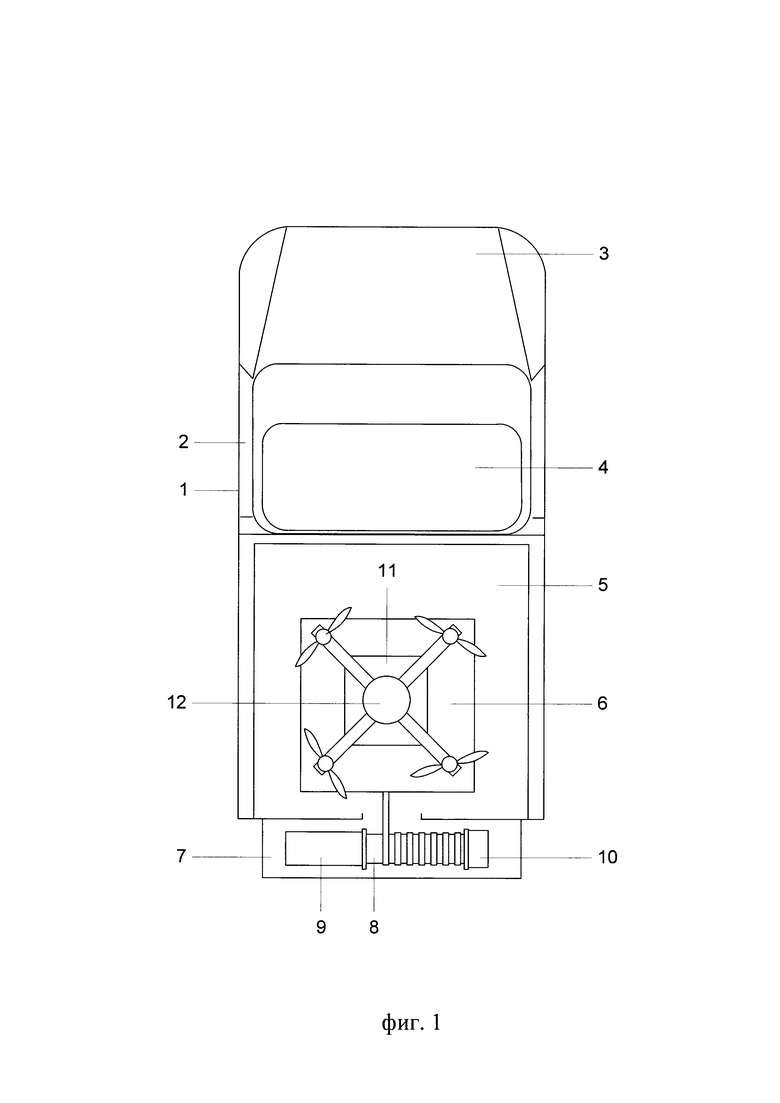
фиг. 1 изображает вид сверху вездеходного транспортного средства;
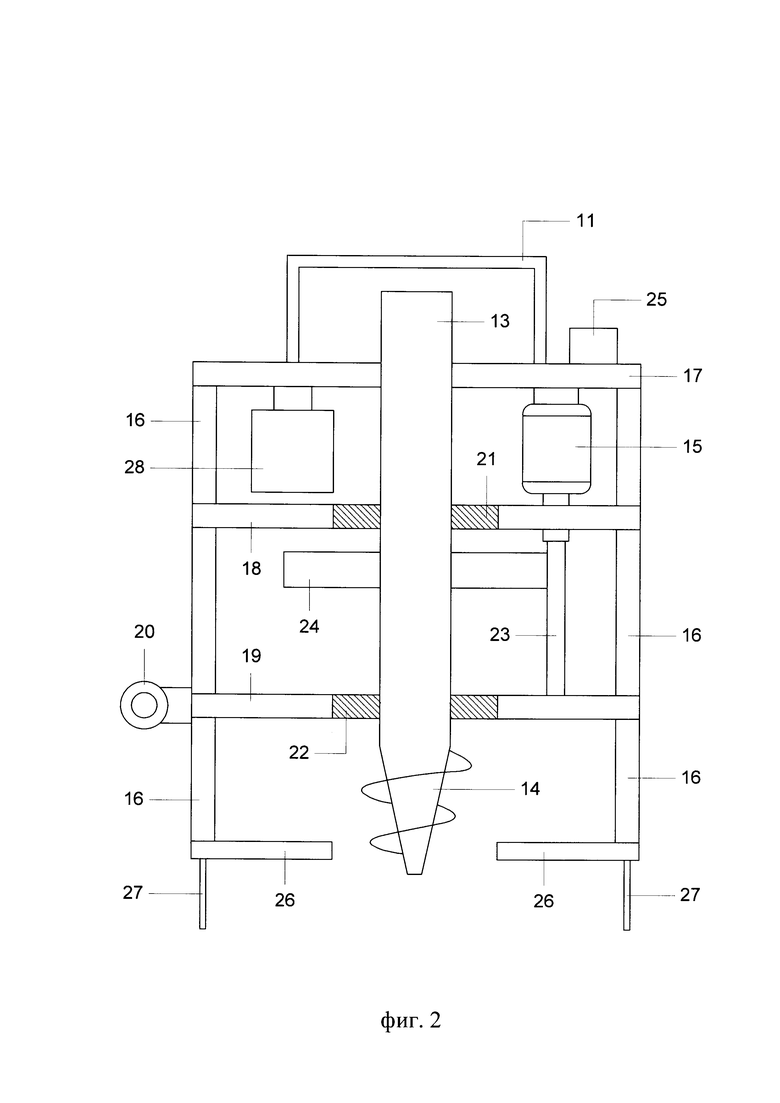
фиг. 2 изображает конструкцию механического средства, предназначенного для его автоматического закрепления к неподвижному объекту;
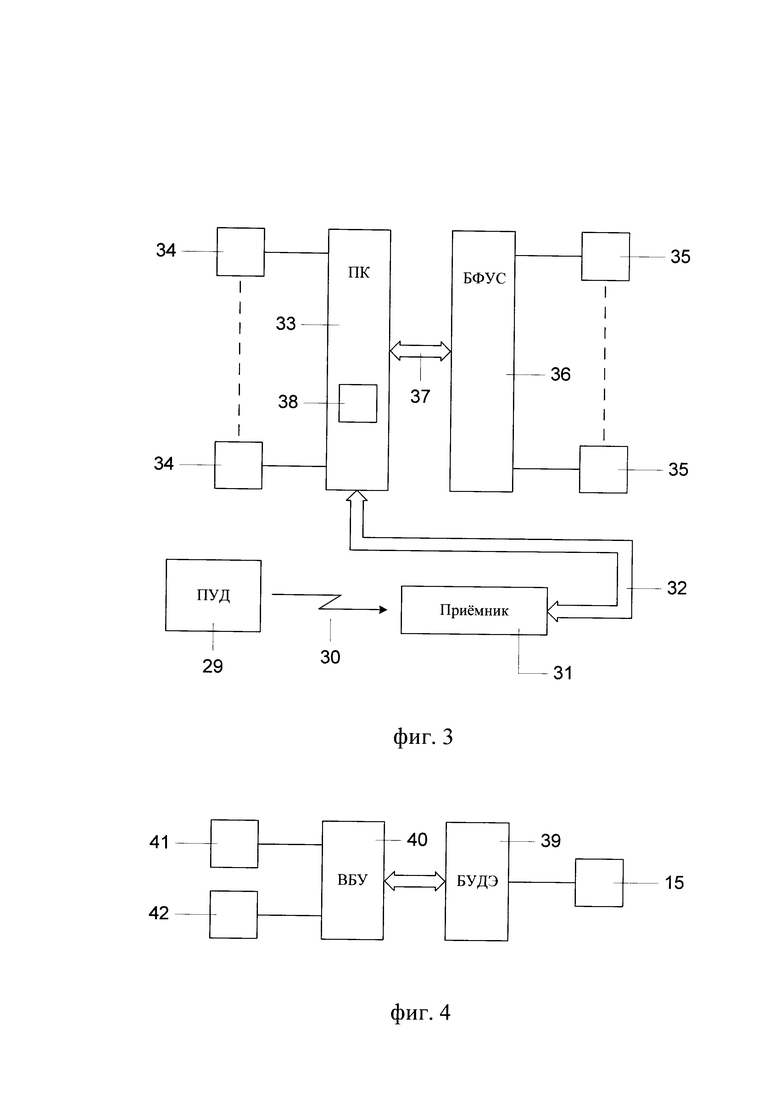
фиг. 3 изображает функциональную схему блока управления дроном;
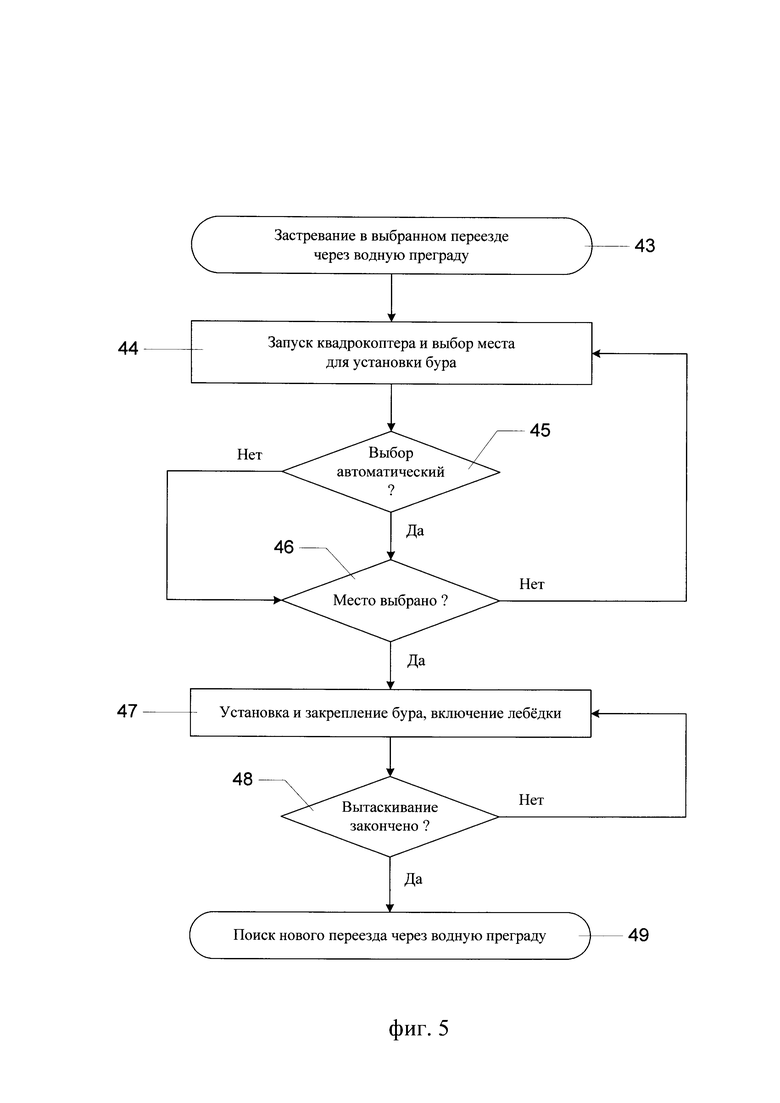
фиг. 4 изображает функциональную схему блока управления буром;
фиг. 5 изображает схему алгоритма управления вездеходным транспортным средством, застрявшем в выбранном переезде через водную преграду.
При описании лучших вариантов реализации данного изобретения, а также с целью удобства его дальнейшего рассмотрения, все сокращения, стоящие в скобках после одного или нескольких слов, будут относиться к их начальным буквам.
На фиг. 1 показано вездеходное транспортное средство (ВТС) 1, на раме которого закреплен кузов 2, а также механизм передачи движения от двигателя к колесным или гусеничным движителям. Сам двигатель расположен внутри капота 3. Внутреннее пространство кузова 2 условно разделено на пассажирскую зону, где в кабине 4 размещено место водителя, и грузовую зону в виде грузовой платформы 5. На платформе 5 установлено механическое средство (МС) 6, предназначенное для его закрепления к неподвижному (относительно ВТС) объекту в виде грунта. К раме сзади ВТС 1 приварена стальная плита 7, на которой смонтирована лебедка, состоящая из намоточного барабана (НБ) 8 с тросом, имеющим внутри встроенный тормоз. С одной стороны НБ 8 монтируется электродвигатель 9, а с другой - понижающий редуктор 10. Конец троса проходит через вырез в задней части грузовой платформы 5 и закреплен на механическом средстве 6. Управление лебедкой осуществляется через стандартный блок, включающий необходимое число реле и управляющих ими элементов. Как правило, стандартный блок выполнен в виде дистанционного блока управления (ДБУ). Для примера можно привести лебедку марки Electric Winch-12v-12000 lbs, имеющую тяговое усилие 5443 кг и включающую в себя все вышеперечисленные элементы, а именно: ДБУ, автоматическую тормозную встроенную систему, понижающий редуктор, электродвигатель мощностью 4,5 кВт и стальной трос длиной 25 метров. Сверху механического средства 6 установлен кожух 11, на котором закреплен воздушный дрон (ВД) 12, выполненный в виде квадрокоптера - устройства с четырьмя несущими винтами. Воздушный дрон (или просто дрон) - это беспилотный летательный аппарат, управляемый посредством пульта управления дроном (ПУД), размещенным в кабине 4. В общем случае у воздушного дрона может быть от трех несущих винтов. Дрон с большим числом несущих винтов называется мультикоптером.
На фиг. 2 показано МС 6, предназначенное для автоматического закрепления в грунте свободного конца троса, намотанного на НБ 8. За основу МС 6 взят бур, описанный в патенте RU №2619503 под названием "Бур для вытаскивания с помощью лебедки застрявшего колесного транспортного средства". Описанный в этом патенте бур представляет собой цилиндр 13 с заостренным винтовым наконечником 14. В его верхней части приварена пластина со скобой для крепления троса лебедки, а также рукоятки для завертывания бура в грунт. В нашем случае вместо рукоятки используется дополнительный электродвигатель (ДЭ) 15, установленный внутри корпуса, состоящего из четырех вертикальных стоек 16, скрепленных тремя панелями: верхней панелью (ВП) 17, средней панелью (СП) 18 и нижней панелью (НП) 19. К ее середине приварена скоба 20, в отверстие которой заведен и закреплен посредством петли свободный конец троса. Из рисунка видно, что вращение цилиндра 13, установленного на двух подшипниках скольжения (ПС) 21, 22, достигается за счет дополнительного электродвигателя (ДЭ) 15, на валу которого закреплено цилиндрическое зубчатое колесо 23, состоящее в зацеплении с зубчатым колесом 24, закрепленным на цилиндре 13. При скрещивающихся осях цилиндра 13 и вала дополнительного электродвигателя 15 зубчатое колесо 24 связано с ним посредством червячной передачи. Подшипники 21, 22 скольжения установлены на СП 18 и НП 19. Можно также отметить, что с целью упрощения рассмотрения описания на представленном рисунке показаны только основные элементы конструкции. С целью автоматического или полуавтоматического (дистанционного) закрепления механического средства 6 на грунте используется блок управления буром (БУБ) 25, закрытый металлическим кожухом. Из других конструктивных элементов механического средства 6 можно отметить ограничительные плоскости 26 и шпильки (штыри) 27, ввернутые в вертикальные стойки 16. Ограничительные плоскости 26, приваренные к вертикальным стойкам 16, предотвращают их погружение в грунт, а шпильки 27 ограничивают перемещение в горизонтальной плоскости всей конструкции во время ее установки. Кроме того, шпильки 27 за счет малой толщины упрощают начальную установку в грунте механического средства 6. Питание дополнительного электродвигателя 15, а также БУБ 25, производится по отдельному проводу от аккумулятора ВТС 1 или от вспомогательного аккумулятора (ВА) 28.
На фиг. 3 показана типовая функциональная схема блока управления дроном (БУД) модели DJI Agras MG-1, который можно использовать в описываемом устройстве, но только после введения в него блока переключения направления вращения винтов (БПНВВ). Без этого блока применение устройства на твердом грунте может быть затрудненным. Управление мультикоптером осуществляется контроллером дистанционного управления, входящим в ПУД 29. Последний подключен посредством радиоканала 30 к приемнику 31, связанному через многоразрядную шину 32 с полетным контроллером (ПК) 33, например, типа "Arduino Mega 2560" от производителя из Италии "Ardupilot". За обработку команд, поступивших через приемник 31, отвечает ПК 33, подключенный к нескольким датчикам 34, позволяющим дрону иметь стабильное поведение в полете, а также водителю (или его помощнику) ВТС 1 иметь возможность закрепления ВД 12 в грунте. В качестве определенного числа Ν (N = 1, 2, …) датчиков 34 могут использоваться такие устройства как видеокамера, радар, лидар, датчик положения ВД 12, гироскоп, акселерометр, сонар (ультразвуковой сенсор), GPS модуль. Последний обеспечивает географическое позиционирование ВД 12, посредством полученных данных со спутниковых систем, что значительно облегчает закрепление дрона в грунте в случае потери с ним связи через радиоканал 30. В этом случае эту операцию может производить средство искусственного интеллекта (СИИ), имеющееся на борту большинства выпускаемых дронов. Посредством видеокамеры водитель ВТС 1 получает на экране ПУД 29 изображение местности, позволяющее выбрать удобный участок для закрепления дрона на его грунте. С целью обеспечения максимальной площади просмотра одна или несколько видеокамер ВД 12 должны быть вынесены за пределы поперечных размеров МС 6. Непосредственное управление определенным числом К (К > 2) электромоторов 35 производится от блока формирования управляющих сигналов (БФУС) 36, связанного с ПК 33 с помощью шины 37. Блок формирования управляющих сигналов содержит ключи, выполненные, например, в виде тиристоров или силовых транзисторов, управляемых сигналами от ПК 33. Он принимает информацию от датчиков 34, обрабатывает ее по нижеприведенному алгоритму и отталкиваясь от полученных данных отдает команды БФУС 36 на включение соответствующих электромоторов 35. К имеющимся в настоящее время режимам на выпускаемых дронах относятся, в частности, следующие: увеличение оборотов на всех несущих винтах (подъем); уменьшение оборотов на всех несущих винтах (снижение); увеличение оборотов одной половины винтов и уменьшение оборотов другой половины (движение в сторону). Введенный в полетный контроллер БПНВВ 38, выполненный на программном уровне, обеспечивает изменение направления вращения винтов с целью придания дрону отрицательной вертикальной силы, необходимой для преодоления сопротивления грунта при закреплении на нем средства 6.
На фиг.4 показана функциональная схема блока управления буром (БУБ). Последний включает блок управления дополнительным электродвигателем (БУДЭ) 39, обеспечивающем включение ДЭ 15 после получения соответствующей команды из вспомогательного блока управления (ВБУ) 40. Он принимает информацию от датчиков 41, 42 (а также от ДБУ), обрабатывает ее и отталкиваясь от полученных данных отдает команды БУДЭ 39 на включение ДЭ 15. В состав ВБУ 40 входит микропроцессор, а также порты ввода и вывода данных, подключенные к БУДЭ 39 и двум датчикам 41, 42. Один из них является датчиком близости (ДБ) 41, а другой - датчиком положения (ДП) 42 цилиндра 13. Кроме того, ВБУ 40 связан по вспомогательному радиоканалу (на рисунке не показан) с приемником 31. Датчик 42 положения может быть выполнен в виде емкостного датчика, одной из обкладок которого является сам цилиндр 13, находящийся внутри полого неподвижного цилиндра, установленного на ВП 17 и используемого в качестве второй обкладки. Датчик 41 близости установлен на одной из ограничительных плоскостей 26, выпускается под брендом "Lanbao" и выполнен в виде лазерного датчика измерения расстояния S в пределах 50 мм (0 ≤ S ≤ 50 мм). Кроме того, этот датчик имеет самоадаптирующее управление и оптимизацию в соответствии с отражательной способностью поверхности, что позволяет осуществлять стабильное измерение расстояния до поверхности с любым грунтом. С целью оптимального функционирования всех элементов МС 6 величина S должна быть равна длине шпильки 27. Здесь можно отметить, что для удобства водителя ДБУ может быть конструктивно объединен с ПУД 29 и использовать при этом радиоканал 30. Также и механизм для автоматического закрепления МС 6 в грунте может быть связан с ПУД 29. От него команды на включение и выключение ДЭ 15 могут поступать по радиоканалу 30. Таким образом, механизм, предназначенный для автоматического закрепления МС 6 к неподвижному объекту в виде грунта, содержит датчики и управляемые ими силовые элементы.
На фиг.5 показан алгоритм управления ВТС 1, застрявшем в выбранном переезде через водную преграду (действие 43). Причем в качестве дрона используется ВД 12. Практическая реализация данного алгоритма производится с помощью специального программного обеспечения, которое хранится в постоянных запоминающих устройствах (ПЗУ) средств 12, 25, 29, 33, 40. После застревания водитель производит запуск ВД 12 с закрепленным МС 6 и на экране ПУД 29, отображающего видеоинформацию от камеры дрона, производит поиск удобного места для его установки (действие 44). Перед полетом дрона водитель ВТС 1 посредством ДБУ отключает встроенный в лебедку тормоз, вследствие чего ВД 12 с прикрепленным к нему тросом раскручивает НБ 8. При этом водитель на ПУД 29 может выбрать один из двух режимов полета дрона: автоматический или интеллектуальный ("Да" в условии 45) и ручной ("Нет" в условии 45). В интеллектуальном режиме поиск подходящего места можно спланировать нажатием на ПУД 29 соответствующих кнопок. В этом случае будет задействовано СИИ дрона, выдающее одну из двух команд: "место найдено" или "поиск продолжается". В общем случае структура искусственного интеллекта (ИИ), используемого для двухальтернативного выбора правильного решения (в нашем случае решения о возможности или невозможности установки МС 6) включает четыре основных блока - базу данных (БД), нейронную сеть (НС), решающее устройство (РУ) и интеллектуальный интерфейс, позволяющий водителю ВТС 1 вводить в БД новую информацию после очередной установки МС 6. Решающее устройство предназначено для формирования сигнала, например, в виде импульса прямоугольной формы, когда напряжение с выхода нейронной сети превысит заданный пороговый уровень. Выполнение СИИ может иметь разные варианты. В одном из них СИИ может быть представлено в виде отдельного процессора для нейросетевых вычислений, а в другом - непрерывно слать данные в "облако" с находящейся в нем нейронной сетью. В качестве примера отдельного модуля можно привезти процессор "Kirin 980" от компании "Huawei", специально предназначенный для работы с машинным обучением. Алгоритмы обучения для нейронной сети бывают с учителем и без него. С учителем, в качестве которого выступает водитель ВТС 1, нейронной сети предоставляется некоторая выборка обучающих примеров, например, в виде уже совершенных установок МС 6, положительно оцененных "учителем". Ввод оценки последним производится посредством устройства ввода, подключенным к СИИ. Критерием "правильности ответа" является оценка водителя. На ее основе после вышеуказанного сравнения вычисляются весовые коэффициенты входных данных, поступающих после завершенной установки. В процессе работы СИИ переведенные в цифровой формат входные данные в виде таких параметров как наклон грунта, оптические характеристики грунта, высота зависания дрона и т.п., умноженных на их весовые коэффициенты, подаются на вход нейронной сети, где после суммирования сравниваются в РУ с суммами соответствующих совокупностей известных данных, считанных из БД и получивших положительную оценку после завершения установки МС 6. При превышении порогового уровня даже одной "правильной" совокупности с выхода ПК 33 снимается сигнал, после которого в БФУС 36 вырабатываются напряжения питания винтов, переводящие ВД 12 в режим его снижения. В ручном режиме поиск водителем ВТС 1 подходящей площадки для установки МС 6 производится по передаваемому из видеокамеры изображению местности. Если место установки выбрано ("Да" в условии 46), то с помощью ПУД 29 водителем формируется команда на вертикальное опускание МС 6 сначала на заданное расстояние до грунта, а затем, после автоматического переключения вращения винтов дрона на противоположные, до касания грунтом ограничительных плоскостей 26. После этого выполняется действие 47 по закреплению МС 6 в грунте посредством вращения бура от ДЭ 15. Команда на переключение вращения винтов поступает из ВБУ 40 по вспомогательному радиоканалу на вход приемника 31 после первого срабатывания ДБ 41 (при 0 < S < 50 мм). А команда на включение ДЭ 15 поступает из ВБУ 40 на вход БУДЭ 39 после второго срабатывания ДБ 41 (при S = 0). После этого бур заворачивается в грунт до момента срабатывания ДП 42, сигнал с которого также поступает из ВБУ 40 на вход БУДЭ 39, в результате чего ДЭ 15 останавливается. В дальнейшем действия водителя сводятся, во-первых, к вытаскиванию ВТС 1 в место его нахождения перед выбранным переездом через водную преграду и, во-вторых, к возврату МС 6 на ВТС 1. Вытаскивание проводится с помощью лебедки после дистанционного включения водителем ее стандартного режима, посредством которого за счет наматывания троса на НБ 8 производится возврат ВТС 1 в исходную позицию. Возврат МС 6 производится вручную по командам, передаваемым водителем сначала для извлечения бура из грунта (включение ДЭ 15), а затем для запуска ВД 12 с целью его возврата на грузовую платформу 5. Намоточный барабан лебедки при этом включается для наматывания троса по мере приближения дрона к грузовой платформе. Возврат ВД 12 на грузовую платформу 5 может происходить как вручную по командам водителя, так и автоматически по показаниям датчиков 34. Если вытаскивание закончено ("Да" в условии 48), то водителем ВТС 1 производится действие 49 по поиску другого переезда через эту преграду.
Заявленное изобретение не только расширяет сферы использования вездеходного транспортного средства в различных отраслях экономики, но и создает такие условия его применения, в которых эксплуатация любого другого движущегося аппарата невозможна в принципе.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для информирования водителя автомобиля об условиях обгона | 2021 |
|
RU2755645C1 |
| Устройство для игры в продвинутый гольф | 2022 |
|
RU2799667C1 |
| Устройство для проведения игр в гибридных видах спорта | 2022 |
|
RU2796332C1 |
| Устройство для проведения игр в гибридных видах спорта | 2023 |
|
RU2810195C1 |
| СРЕДСТВО ТРАНСПОРТНОЕ ВЕЗДЕХОДНОЕ | 2012 |
|
RU2531641C2 |
| СПОСОБ И УСТРОЙСТВО СВЕТОВОЙ СИГНАЛИЗАЦИИ В АВТОМОБИЛЕ | 1995 |
|
RU2139204C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СИСТЕМОЙ ОЧИСТКИ ВЕТРОВОГО СТЕКЛА В АВТОМОБИЛЕ | 1995 |
|
RU2145554C1 |
| Всесезонный тундроход | 2016 |
|
RU2628414C1 |
| УСТРОЙСТВО ДЛЯ ИГРЫ В БИЛЬЯРД И СПОСОБ ЕГО ИСПОЛЬЗОВАНИЯ | 2007 |
|
RU2344865C1 |
| ГУСЕНИЧНЫЙ ТРАНСПОРТЕР И СПОСОБ ПОГРУЗКИ НА НЕГО ПАРОМА | 2006 |
|
RU2332322C1 |
Изобретение относится к транспортным средствам повышенной проходимости. Вездеходное транспортное средство содержит кабину и механизм для его перемещения посредством наматывания намоточным барабаном троса. Cвободный конец троса соединен с механическим средством его закрепления к неподвижному объекту в виде грунта. Механическое средство содержит механизм, предназначенный для его автоматического закрепления в грунте. При этом само механическое средство соединено с воздушным дроном, пульт управления которым расположен в кабине транспортного средства. Достигается самостоятельность водителя транспортного средства в процессе его самовытаскивания с помощью лебедки. 2 з.п. ф-лы, 5 ил.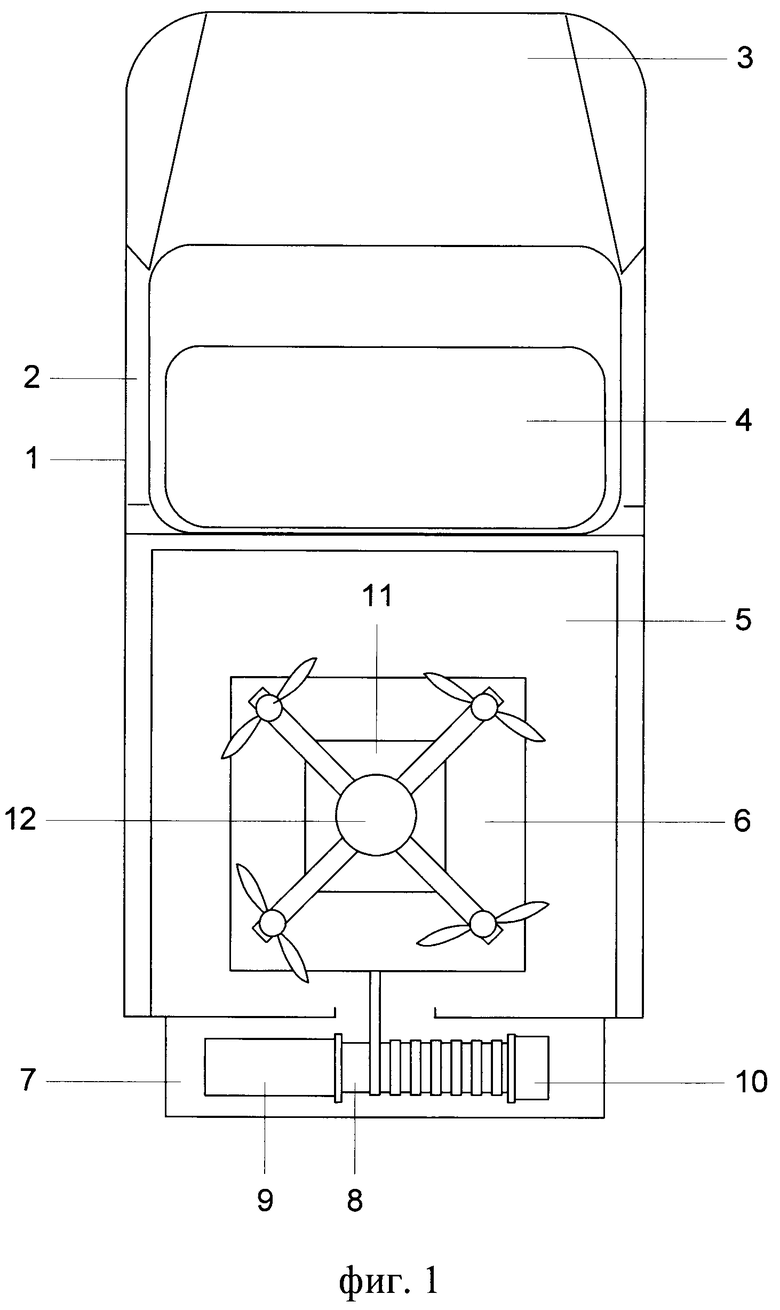
1. Вездеходное транспортное средство, содержащее кабину и механизм для его перемещения посредством наматывания намоточным барабаном троса, свободный конец которого соединен с механическим средством его закрепления к неподвижному объекту, отличающееся тем, что механическое средство содержит механизм, предназначенный для его автоматического закрепления к неподвижному объекту, при этом само механическое средство соединено с воздушным дроном, пульт управления которым расположен в кабине транспортного средства.
2. Средство по п. 1, отличающееся тем, что воздушный дрон содержит блок переключения направления вращения винтов.
3. Средство по п. 1, отличающееся тем, что механизм для автоматического закрепления механического средства связан с пультом управления.
| Способ форсирования участка местности с малой несущей способностью наземным транспортным средством с вертолетом сопровождения | 2019 |
|
RU2729527C1 |
| УСТРОЙСТВО ДЛЯ САМОВЫТАСКИВАНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2004 |
|
RU2263601C1 |
| УСТРОЙСТВО ДЛЯ САМОВЫТАСКИВАНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2340482C1 |
| АВТОМАТИЗИРОВАННЫЙ УЧАСТОК КОНТРОЛЯ МОНТАЖА ПАНЕЛЕЙ ПРИБОРОВ АВТОМОБИЛЯ | 2002 |
|
RU2240570C2 |
| US 4778126 A1, 18.10.1988 | |||
| DE 4028260 C, 27.05.1992. | |||

