Изобретение относится к области передачи сигналов, отличающихся использованием беспроводной электрической связи, а именно с использованием радиосигналов, и предназначено преимущественно для организации канала связи и управления подводным робототехническим комплексом (ПРТК), включающим автономный необитаемый подводный аппарат (АНПА) и корабельный или береговой пост управления (ПУ), посредством использования системы сотовой радиотелефонной связи при условии нахождения ПРТК в зоне действия средств и систем сотовой связи как в России, так и за ее пределами. Данное изобретение может также быть использовано для организации канала связи и управления беспилотными летательными аппаратами и наземными робототехническими комплексами.
Подводные робототехнические комплексы используются для картографирования рельефов дна, выполнения обзорной гидролокационной и фотосъемки морского дна, обследования донных сооружений, магистральных трубопроводов, подводных кабелей, портовых акваторий, мониторинга морской среды, включая места захоронения химических и взрывчатых веществ и обследование подводных потенциально опасных объектов, изучения структуры донного грунта, фотосъемки выделенных участков поверхности дна и подводных объектов.
Очевидно, что эффективность таких операций была бы значительно более высокой в случае оснащения ПРТК средствами радиосвязи, основное предназначение которых видится, с одной стороны, в возможности оперативного управления подводным аппаратом-роботом, а с другой, - в возможности передачи ими на корабельный или береговой пост управления результатов работы гидролокационных средств, видеосъемки и иной информации.
В последнее время мобильные и ультракомпактные устройства связи, такие как смартфоны, сотовые телефоны и т.д., пользуются популярностью у большого числа разных пользователей. Поскольку этот сегмент рынка уже развит, все больше и больше функциональных возможностей включаются в мобильные устройства системы сотовой радиотелефонной связи. Как правило, когда количество различных типов мобильных устройств связи растет, функциональные возможности, включенные в них, как и требование к добавляемым функциям, также растет. Производители мобильных устройств для сотовой связи постоянно реагируют на возросшее требование к функциональным возможностям посредством того, что они включают дополнительные функции и открывают управляющие ими операционные системы и тем самым предоставляют возможность пользователям расширить сферу использования системы сотовой связи, например, для организации канала связи и управления мобильным ПРТК, когда АНПА находится в зоне действия сотовой связи.
Известно изобретение, относящееся к дистанционно-управляемому мобильному роботизированному комплексу, размещенному на подвижной части подвижного объекта-шасси, и пункту управления (патент RU №2547633, МПК G08C 17/02, опубликован 10.04.2015 г. «Способ организации беспроводного канала управления мобильным роботизированным комплексом и система связи и передачи данных»). Этим изобретением решается задача по повышению эффективности и надежности роботизированных комплексов вооружений.
В известном способе организации беспроводного канала управления мобильным робототехническим комплексом, включающем организацию канала информационного обмена комплекса, оснащенного средствами приема и передачи информации, между системами комплекса, в том числе между системой опознавания образов, блоками обработки информации, датчиками и вычислительной системой комплекса, новым является то, что на первоначальном этапе для организации беспроводного канала управления мобильного робототехнического комплекса производится оценка и определение необходимой пропускной способности (скорости соединения) канала для передачи команд управления и телеметрии, на втором этапе проводится оценка и определение необходимой пропускной способности (скорости соединения) канала для передачи видеоинформации с учетом анализа качества распознаваемости объектов различной конфигурации на передаваемой видеоинформации, на третьем этапе проводится сравнительный анализ форматов сжатия и передачи видеоданных, выбор режимов исходного изображения и общей структуры подсистемы связи, на четвертом этапе проводится анализ характеристик частотных диапазонов и выбор наиболее подходящего для применения в составе МРК диапазона частот, исходя из возможности обеспечения связи на расстояние (2-3) км и технических характеристик необходимого оборудования, на пятом этапе формируется структура системы связи и передачи данных, основанная на смешанном (комплексном) методе передачи информации в аналоговом и цифровом виде. Этот способ организации беспроводного канала управления мобильным робототехническим комплексом реализуется системой связи и передачи данных, содержащей канал информационного обмена, блоки обработки информации, средства приема и передачи информации, вычислительную систему, в которой новым является то, что в системе связи и передачи данных для передачи при смешанном (комплексном) способе передачи информации передатчиком видеосигнала, бортовой компьютер, радиомодем данных, установленные на подвижной части мобильного роботизированного комплекса, для приема данных при смешанном (комплексном) способе задействованы: приемник видеосигнала, связанный с блоком аналогового декодирования, компьютер пункта управления, блок видеозахвата, радиомодем данных. Система связи и передачи данных для передачи при смешанном (комплексном) способе передачи видеоинформации состоит из передающей части, размещенной на подвижной части мобильного роботизированного комплекса (МРК), и принимающей части, размещенной на пункте управления (ПУ).
Технический результат, получаемый при осуществлении группы изобретений, заключается в создании способа организации беспроводного канала управления мобильным робототехническим комплексом и системы связи и передачи данных, обеспечивающих передачу команд управления и прием телеметрии, передачу видеоизображения, передачу служебной информации, обновление микропрограмм без усложнения алгоритма функционирования системы связи и передачи данных и применяемых технических средств при обеспечении высокой степени надежности и стабильности канала связи.
Известный способ организации беспроводного канала управления мобильным роботизированным комплексом предназначен для использования в наземных условиях на подвижной части подвижного объекта-шасси, а пульта оператора на машине управления. Практически известный способ по своей сути не может быть использован для обеспечения возможности дистанционного контроля, связи и управления автономным необитаемым подводным аппаратом ПРТК.
Известен также способ беспроводного канала связи и управления подводным робототехническим комплексом (см. Борейко А.А., Горнак В.Е., Мальцева СВ., Матвиенко Ю.В., Михайлов Д.Н. Малогабаритный многофункциональный автономный необитаемый подводный аппарат «МТ-2010»// Подводные исследования и робототехника. 2011. №2(12). С. 37-42). Известный ПРТК включает автономный необитаемый подводный аппарат (АНПА) и пост управления оператора, размещаемый на борту обеспечивающего судна (ОС), которые функционально связаны между собой посредством двухсторонней радиосвязи с использованием радиомодема при нахождении АНПА на поверхности моря и прямой видимости с ОС. В данном случае радиомодем обеспечивает двухстороннюю связь АНПА с ОС со скоростью 19, 2 кбод на дистанции не менее 3 км для передачи на борт АНПА команд, позволяющих управлять его движением по поверхности моря, а также для перепрограммирования и перезапуска АНПА с новой миссией и получения данных с борта АНПА.
Подводный аппарат снабжен также системой гидроакустической связи, телеуправления и телеметрии, которая обеспечивает прием команд управления и получения сигналов ответа, передачу на ОС текущей телеметрической информации, содержащей значения скорости, курса, высоты, глубины и координат АНПА, а также прием телеметрической информации с борта ОС.
Взаимодействие систем в составе АНПА, их контроль и управление регулируются на программно-аппаратном уровне в составе локальной вычислительной сети (ЛВС).
В общей структуре системы управления АНПА выделены как базовые системы, обеспечивающие его функционирование как носителя аппаратуры, так и информационно-поисковые системы. Все системы управления АНПА функционально связаны и представлены в следующем составе: система поиска АНПА, система радиосвязи, система программного управления, система энергообеспечения, система бортовой навигации, поисковых и измерительных систем, а также гидроакустического и движительно-рулевого комплексов. Организующим ядром базовой системы является система программного управления (СПУ), обеспечивающая управлением движением, а также контрольно-аварийные и поисковые функции.
Система радиосвязи в известном АНПА организована на использовании радиомодемов - радиотехнических устройств, предназначенных для передачи синхронных цифровых потоков данных по радиоканалу без использования специализированных протоколов доступа к среде передачи данных.
К недостаткам их использования можно отнести:
- дальность связи зависит от скорости передачи данных и их характеристик, применяемых совместно с модемом антенн, и может достигать только нескольких километров в условиях прямой видимости, что недостаточно для управления АНПА, находящимся в автономном режиме, т.к. это требует постоянного присутствия обеспечивающего судна;
- возможность использования радиомодемов только для передачи синхронных цифровых потоков также накладывают ограничения по видам передаваемой информации с АНПА, что затрудняет анализ поступающих данных, необходимых для принятия решения и его применения.
Задачей, на решение которой направлено предлагаемое изобретение, является создание эффективного способа организации канала связи и управления ПРТК, включающим один или группу АНПА, посредством использования системы сотовой радиотелефонной связи при нахождении АНПА в зоне действия последней.
Поставленная задача достигается тем, что в способе организации беспроводного канала связи и управления подводным робототехническим комплексом, включающим автономный необитаемый подводный аппарат (АНПА) и пост управления (ПУ), функционально связанные посредством радиоканала и снабженные средствами приема и передачи информации, причем управление системами, обеспечивающими функционирование АНПА, реализуют на программно-аппаратном уровне в составе локальной вычислительной сети, в том числе функционально связанными системами поиска АНПА, радиосвязи, программного управления, энергообеспечения, бортовой навигации, поисковой и измерительной, а также комплексами гидроакустическим и движительно-рулевым, радиоканал связи и управления между АНПА и ПУ организуют посредством системы сотовой радиотелефонной связи, при нахождении АНПА в зоне действия последней и нахождении его радиоантенны над поверхностью воды, в качестве средств приема и передачи на борту АНПА и ПУ устанавливаются сотовые радиотелефоны, включающие по крайней мере функционально связанные между собой цифровой сигнальный процессор (CPU), аналого-цифровой преобразователь (АЦП), кодер речи, кодер канала, декодер канала, декодер речи, цифроаналоговый преобразователь (ЦАП), эквалайзер, клавиатуру, дисплей, блок шифрования и дешифрования сообщений, детектор речевой активности, терминальные устройства, Sim-карту, при этом цифровой сигнальный процессор (CPU) сотового радиотелефона, размещенного на борту АНПА, функционально подключается к системе программного управления АНПА, а сам сотовый радиотелефон дополнительно оснащается блоком автоматического включения, который подключается функционально к цифровому сигнальному процессору (CPU) этого сотового радиотелефона.
В заявленном способе организации беспроводного канала связи и управления подводным робототехническим комплексом, включающим автономный необитаемый подводный аппарат (АНПА) и пост управления (ПУ), общими существенными признаками для него и прототипа являются:
- АНПА и ПУ функционально связаны посредством радиоканала;
- АНПА и ПУ снабжены средствами приема и передачи информации;
- управление системами, обеспечивающими функционирование АНПА, реализуют на программно-аппаратном уровне в составе локальной вычислительной сети, в том числе функционально связанными системами поиска АНПА, радиосвязи, программного управления, энергообеспечения, бортовой навигации, поисковой и измерительной, а также комплексами гидроакустическим и движительно-рулевым.
Сопоставительный анализ существенных признаков заявленного способа организации беспроводного канала связи и управления подводным робототехническим комплексом показывает, что первый в отличие от прототипа имеет следующие существенные отличительные признаки:
- радиоканал связи и управления между АНПА и ПУ организуют посредством системы сотовой радиотелефонной связи, при нахождении АНПА в зоне действия последней и нахождении его радиоантенны над поверхностью воды;
- в качестве средств приема и передачи на борту АНПА и ПУ устанавливаются сотовые радиотелефоны, включающие по крайней мере функционально связанные между собой цифровой сигнальный процессор (CPU), аналого-цифровой преобразователь (АЦП), кодер речи, кодер канала, декодер канала, декодер речи, цифро-аналоговый преобразователь (ЦАП), эквалайзер, клавиатуру, дисплей, блок шифрования и дешифрования сообщений, детектор речевой активности, терминальные устройства, Sim-карту;
- цифровой сигнальный процессор (CPU) сотового радиотелефона, размещенный на борту АНПА, функционально подключается к системе программного управления АНПА;
- сам сотовый радиотелефон дополнительно оснащается блоком автоматического включения, который подключается функционально к цифровому сигнальному процессору (CPU) этого сотового радиотелефона.
Данная совокупность известных и отличительных существенных признаков обеспечивает получение технического результата во всех случаях, на которые распространяется испрашиваемый объем правовой охраны.
В связи с тем, что сотовая система связи является унифицированным средством связи, то совместно с системой управления АНПА решается проблема передачи и приема больших потоков информации при решении АНПА различных задач и исключается необходимость постоянно нахождения рядом с АНПА обеспечивающего судна.
Применение на ПРТК предлагаемой системы связи повышает оперативность управления АНПА за счет возможности управления им в реальном масштабе времени и скрытность управления, используя специальные засекречивающие информацию сотовые радиотелефоны. Малые размеры, вес и потребляемая мощность сотовых радиотелефонов, размещаемых на АНПА, дают возможность увеличения продолжительности времени нахождения на связи АНПА и его работы в подводном положении в целом. Система сотовой связи осуществляет функцию подтверждения доставки отправленного сообщения, что весьма важно в процессе управления АНПА. Следует отметить также, что существует возможность передачи видеоизображения из подводного положения АНПА на ПУ с сотового радиотелефона АНПА через буй-ретранслятор, в течение всего времени выполнения задания АНПА.
На основании изложенного можно заключить, что совокупность существенных признаков заявленного изобретения имеет причинно-следственную связь с достигнутым техническим результатом, т.е. благодаря данной совокупности существенных признаков изобретения стало возможным решить поставленную задачу.
Следовательно, заявленное изобретение является новым, обладает изобретательским уровнем, т.е. оно явным образом не следует из уровня техники и пригодно для промышленного применения.
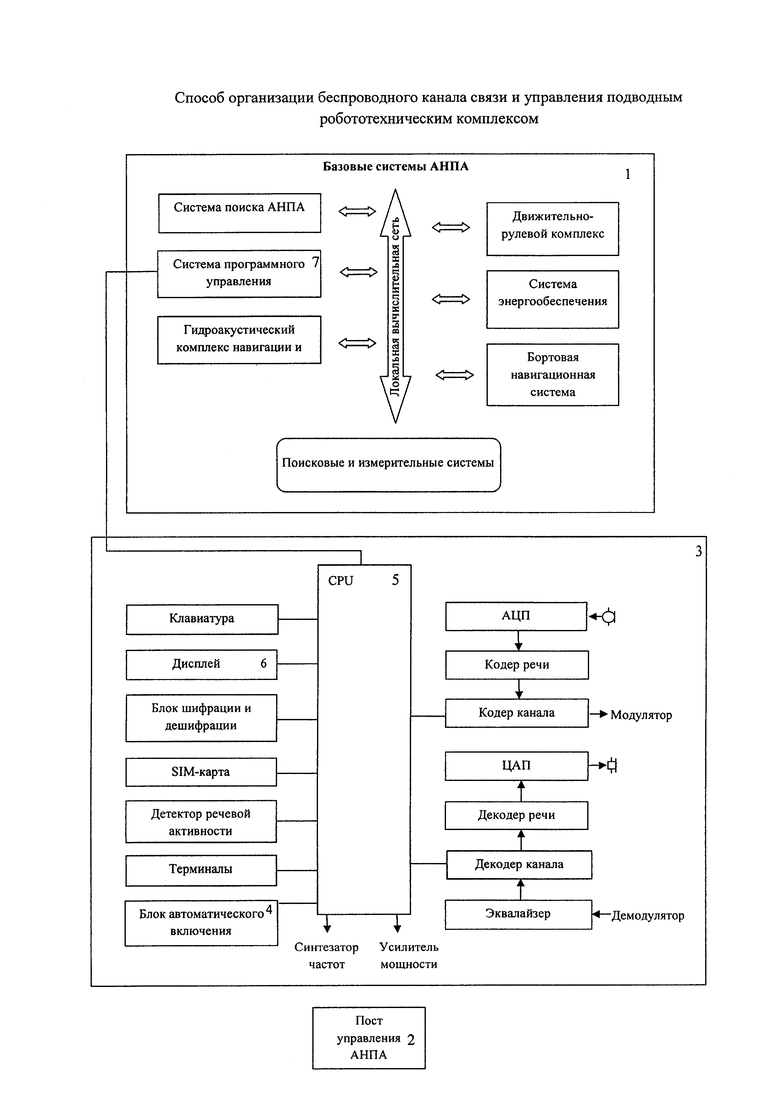
Сущность заявленного способа организации беспроводного канала связи и управления подводным робототехническим комплексом поясняется чертежом, где представлена структурная схема беспроводного канала связи и управления ПРТК. На чертеже и в описании изобретения приняты следующие обозначения:
1 - общая структура системы связи и управления АНПА,
2 - пост управления АНПА, который базируется на ОС или берегу,
3 - сотовый радиотелефон, представленный в виде цифровой и логической частей,
4 - блок автоматического включения сотового радиотелефона, установленного на борту АНПА,
5 - цифровой сигнальный процессор (CPU) сотового радиотелефона, установленного на борту АНПА,
6 - дисплей сотового радиотелефона, установленного на борту АНПА,
7 - система программного управления АНПА.
Способ организации беспроводного канала связи и управления подводным робототехническим комплексом, включающим АНПА и ПУ, посредством системы сотовой радиотелефонной связи осуществляется следующим образом.
Для установления беспроводного канала радиосвязи с поста управления 2 с автономным необитаемым подводным аппаратом 1 пост управления 2 оборудуется сотовым радиотелефоном. Оператор ПУ набирает номер сотового радиотелефона, установленного на борту АНПА, который находится в это время в режиме приема. Сигнал с сотового радиотелефона оператора ПУ по существующей системе сотовой связи поступает на конечную сотовую ячейку, в зоне которой находится АНПА. При поступлении вызова на антенну сотового радиотелефона 3 сигнал в виде электрических колебаний поступает в блок 4 автоматического включения цифрового сигнального процессора (CPU) 5. Цифровой сигнальный процессор (CPU) 5 включается и тем самым приводит сотовый радиотелефон 3 в активный режим, т.е. в режим приема - передачи. С этого момента канал радиосвязи между АНПА и ПУ установлен. Оператор ПУ передает необходимые для передачи команды и программы управления АНПА, которые по существующей сотовой связи через антенну системы принимающего сотового радиотелефона 3 поступает в цифровой сигнальный процессор (CPU) 5, с которого одновременно передается на дисплей 6 и в систему программного управления 7 АНПА и далее на исполнение в соответствующие системы АНПА.
Запрашиваемая оператором ПУ с АНПА информация и иные данные, например фотографии подводных объектов, из соответствующих систем через систему программного управления 7 АНПА поступают в цифровой сигнальный процессор (CPU) 5 сотового радиотелефона 3 и далее по его схеме и антенну на передачу по существующей системе сотовой связи на сотовый радиотелефон оператора ПУ. После окончания передачи данных и информации сотовый радиотелефон 3, находящийся на борту АНПА, переходит из активного состояния в режим приема (ожидания).
Исходя из возможностей системы сотовой связи и программно-аппаратного уровня АНПА возможны следующие программы связи:
- непрерывная программа связи;
- связь по программе;
- связь по вызову;
- выход на связь АНПА с ПУ по окончании задания или связи с внезапно возникшими проблемами.
Организация связи в направлении АНПА - ПУ:
При непрерывной программе связи существует возможность передачи видеоизображения из подводного положения АНПА на пост управления непосредственно с видеокамеры подводного аппарата по волоконно-оптическому кабелю через буй - ретранслятор в течение всего времени выполнения задания. Телефон находится на постоянной связи с обеспечивающего судна или поста управления на берегу в режиме реального времени и имеет возможность передавать информацию в режиме видеосвязи, CMC или ММС на пост управления.
Связь по программе может быть организована как из подводного положения через буй-ретранслятор, который может выпускаться в соответствии с заданной программой, так и непосредственно с АНПА при всплытии. В случае нахождения АНПА в надводном положении передача информации производится, минуя буй-ретранслятор, непосредственно с АНПА.
Связь по вызову. При нахождении АНПА в подводном положении при организации связи «по программе» последнюю осуществляют по каналу гидроакустической (звукоподводной) связи.
Выход на связь АНПА с ПУ по окончании задания или в связи с внезапно возникшими проблемами. В бортовом компьютере АНПА предусматривается возможность выхода на связь АНПА в случае непредвиденных ситуаций или досрочного выполнения задания. При этом АНПА может произвести доклад непосредственно из подводного положения, выпустив буй-ретранслятор, или непосредственно с АНПА, после всплытия в надводное положение.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения распределения скорости звука | 2020 |
|
RU2736231C1 |
| КОМБИНИРОВАННЫЙ ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2022 |
|
RU2809785C1 |
| Способ навигационно-информационной поддержки автономного необитаемого подводного аппарата, выполняющего мониторинг подводного добычного комплекса | 2021 |
|
RU2756668C1 |
| Система многопараметрического мониторинга района техногенной аварии | 2024 |
|
RU2840313C1 |
| СПОСОБ РАДИОПОДАВЛЕНИЯ КАНАЛОВ СВЯЗИ СРЕДСТВАМИ РАДИОЭЛЕКТРОННОЙ БОРЬБЫ С ИСПОЛЬЗОВАНИЕМ ЕН-АНТЕНН | 2022 |
|
RU2801842C1 |
| СИСТЕМА БЕЗОПАСНОСТИ ОБЪЕКТА В ОТКРЫТОЙ АКВАТОРИИ | 2017 |
|
RU2650798C1 |
| СИСТЕМА ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2016 |
|
RU2648546C1 |
| Способ навигационно-информационной поддержки глубоководного автономного необитаемого подводного аппарата | 2018 |
|
RU2689281C1 |
| Способ разработки и настройки бортовой навигационной системы автономного необитаемого подводного аппарата | 2024 |
|
RU2823256C2 |
| Способ контроля маршрута движения автономного необитаемого подводного аппарата с возможностью съёма технической информации и устройство для его реализации | 2018 |
|
RU2713516C2 |
Изобретение относится к области передачи радиосигналов для управления подводным робототехническим комплексом (ПРТК). Технический результат заключается в повышении надежности и стабильности канала связи для передачи радиосигналов. Автономный необитаемый подводный аппарат (АНПА) и пост управления (ПУ) функционально связаны посредством радиоканала и снабжены средствами приема и передачи информации. Радиоканал связи и управления между АНПА и ПУ реализован посредством системы сотовой радиотелефонной связи при нахождении АНПА в зоне действия последней и нахождении его радиоантенны над поверхностью воды. В качестве средств приема и передачи на борту АНПА и ПУ устанавливают сотовые радиотелефоны, включающие по крайней мере функционально связанные между собой цифровой сигнальный процессор (CPU), аналого-цифровой преобразователь, кодер речи, кодер канала, декодер канала, декодер речи, цифроаналоговый преобразователь, эквалайзер, клавиатуру, дисплей, блок шифрования и дешифрования сообщений, детектор речевой активности, терминальные устройства, Sim-карту. 1 з.п. ф-лы, 1 ил.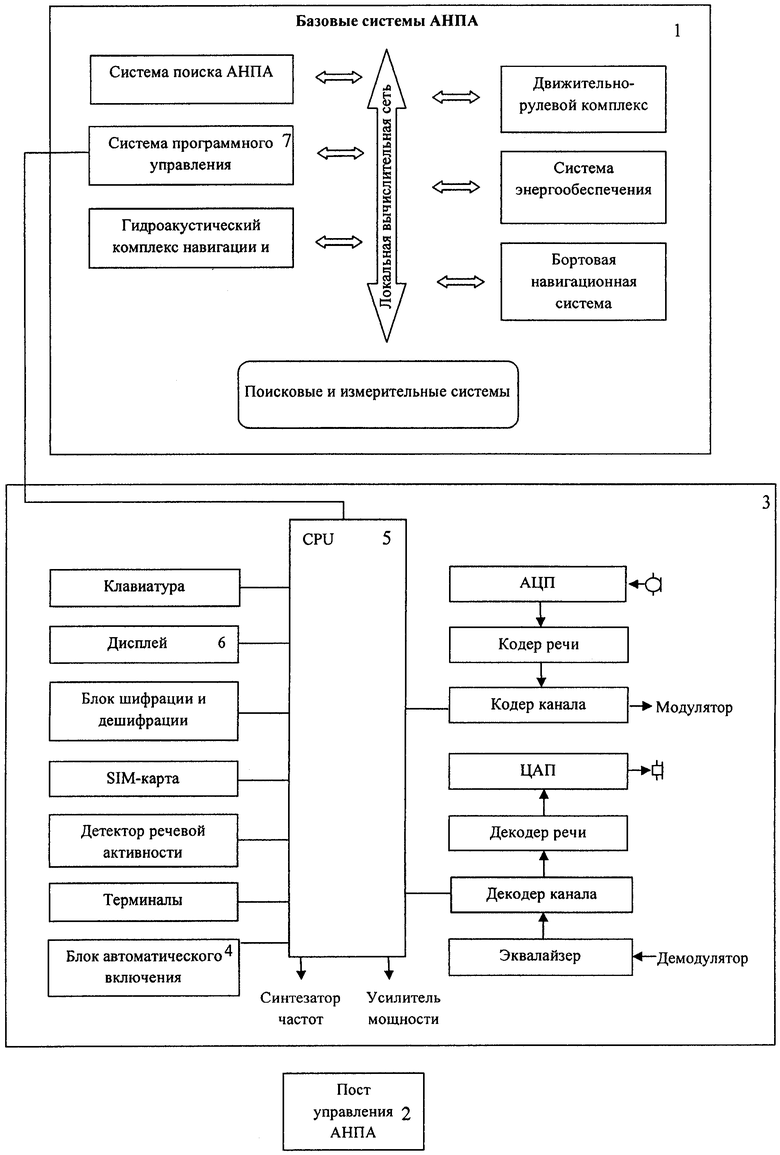
1. Способ управления подводным робототехническим комплексом по каналу связи, включающим автономный необитаемый подводный аппарат (АНПА) и пост управления (ПУ), функционально связанные посредством радиоканала и снабженные средствами приема и передачи информации, причем управление системами, обеспечивающими функционирование АНПА, реализуют на программно-аппаратном уровне в составе локальной вычислительной сети, в том числе функционально связанными системами поиска АНПА, радиосвязи, программного управления, энергообеспечения, бортовой навигации, поисковой и измерительной, а также комплексами - гидроакустическим и движительно-рулевым, отличающийся тем, что радиоканал связи и управления между АНПА и ПУ организуют посредством системы сотовой радиотелефонной связи, в качестве средств приема и передачи информации на борту АНПА и ПУ устанавливаются сотовые радиотелефоны, включающие по крайней мере функционально связанные между собой цифровой сигнальный процессор (CPU), аналого-цифровой преобразователь (АЦП), кодер речи, кодер канала, декодер канала, декодер речи, цифроаналоговый преобразователь (ЦАП), эквалайзер, клавиатуру, дисплей, блок шифрования и дешифрования сообщений, детектор речевой активности, терминальные устройства, Sim-карту, при этом цифровой сигнальный процессор (CPU) сотового радиотелефона, размещенного на борту АНПА, функционально подключается к системе программного управления АНПА, а сам сотовый радиотелефон дополнительно оснащается блоком автоматического включения, который подключается функционально к цифровому сигнальному процессору (CPU) этого сотового радиотелефона.
2. Способ по п. 1, отличающийся тем, что радиоканал связи и управления между АНПА и ПУ организуют посредством системы сотовой радиотелефонной связи при нахождении АНПА в зоне действия последней и нахождении его радиоантенны над поверхностью воды.
| СПОСОБ ОРГАНИЗАЦИИ БЕСПРОВОДНОГО КАНАЛА УПРАВЛЕНИЯ МОБИЛЬНЫМ РОБОТОТЕХНИЧЕСКИМ КОМПЛЕКСОМ И СИСТЕМА СВЯЗИ И ПЕРЕДАЧИ ДАННЫХ | 2014 |
|
RU2547633C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ РОБОТОТЕХНИЧЕСКИМ КОМПЛЕКСОМ МОРСКОГО БАЗИРОВАНИЯ | 2016 |
|
RU2614864C9 |
| Устройство для регулирования высокоскоростных асинхронных двигателей | 1961 |
|
SU140887A1 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |

