Настоящее изобретение касается способа регистрации износа канатного ролика установки канатной дороги, имеющей тяговый канат, который направляется по меньшей мере через один канатный ролик, и имеющей по меньшей мере один сенсор каната, который располагается в известном положении относительно канатного ролика и с помощью которого регистрируется расстояние между тяговым канатом и сенсором каната.
В установках канатных дорог тяговый канат канатной дороги на трассе и в станциях направляется через канатные ролики. Тяговый канат направляется на канатном ролике по рабочей поверхности, обычно по резиновому кольцу, имеющему канавку для направления каната. Канатный ролик, в частности резиновое кольцо канатного ролика, при эксплуатации канатной дороги может изнашиваться, например, из-за качающихся транспортных средств на тяговом канате или из-за несимметричной загрузки транспортных средств, а также во время нормальной эксплуатации вследствие давления тягового каната на рабочую поверхность канатного ролика. Но тяговый канат может также смещаться на канатном ролике (боковой увод тягового каната от канавки для направления каната канатного ролика), что в худшем случае может приводить к выскакиванию тягового каната из канатного ролика. Поэтому уже известно, что у установок канатных дорог в области роликовых батарей на опорах канатной дороги или же в станции, при текущей эксплуатации предусматривается контроль положения каната для распознавания недопустимого смещения тягового каната на канатном ролике, то есть бокового увода. Контроль положения каната осуществляется посредством бесконтактно работающих сенсоров, например, индуктивных сенсоров приближения (например, как в DE 197 52 362 A1), сенсоров Холла (например, как в US 5,581,180 A) или сенсоров вихревого тока (например, как в WO 2019/038397 A1). При недопустимом боковом уводе тягового каната установка канатной дороги останавливается, или снижается скорость перемещения. То и другое при эксплуатации установки канатной дороги, конечно, нежелательно.
Износ рабочей поверхности канатного ролика, например, на резиновом кольце, при текущей эксплуатации обычно контролируется, чтобы при необходимости можно было своевременно заменять канатные ролики, имеющие слишком большой износ, для предупреждения ограничений в эксплуатации или перерывов в эксплуатации. Это может осуществляться или персоналом для технического обслуживания путем визуальной проверки через определенные контрольные интервалы, или же автоматически. Например, из DE 197 52 362 A1 известно, что посредством бесконтактно работающего сенсора при текущей эксплуатации регистрируется не только положение каната, но и снашивание рабочей поверхности канатного ролика. Также в US 5,581,180 A и WO 2019/038397 A1 описывается, что посредством сенсоров положения каната может также констатироваться износ канатного ролика. Для распознавания износа находится расстояние между стационарно смонтированным сенсором положения каната и тяговым канатом при эксплуатации канатной дороги.
Однако эксплуатационные условия установки канатной дороги очень жесткие. При эксплуатации на протяжении одного дня возможны колебания температуры окружающей среды в несколько 10°C, что может приводить к тепловому расширению (в смысле уменьшения или увеличения) канатного ролика. При этом расстояние между тяговым канатом и сенсором положения каната может заметно изменяться, что отрицательно влияет на надежность измерения расстояния. Вследствие трения между тяговым канатом и канатным роликом, или, соответственно, рабочей поверхностью и канатным роликом, канатные ролики при эксплуатации могут нагреваться относительно окружающей среды и, в частности, также относительно сенсора, что тоже может приводить к изменению регистрируемого расстояния между тяговым канатом и сенсором положения каната. При этом регистрируемое расстояние при эксплуатации может изменяться на несколько миллиметров. Сам тяговый канат при эксплуатации подвергается колебаниям, например, вследствие переезда через канатные ролики, имеющие канатные зажимы для транспортных средств или вследствие внешних влияний на установку канатной дороги, таких как ветер, из-за чего тоже регистрируемое расстояние между сенсором положения каната и тяговым канатом при эксплуатации может сильно изменяться. Все это делает распознавание износа канатного ролика с помощью бесконтактного сенсора при измерении расстояния при эксплуатации ненадежным и трудным.
Поэтому задачей настоящего изобретения является улучшить распознавание износа канатного ролика установки канатной дороги, в частности сделать более надежным, и вместе с тем улучшить эксплуатацию, прежде всего, техническое обслуживание, установки канатной дороги.
Эта задача решается таким образом, что в состоянии останова установки канатной дороги измеряется указанное расстояние, и по измеренному в состоянии останова расстоянию делается заключение об износе указанного по меньшей мере одного канатного ролика. Путем регистрации износа канатного ролика в состоянии останова установки канатной дороги могут простым образом снижаться или даже устраняться вызываемые эксплуатацией влияния на измерение расстояния. Было, в частности, обнаружено, что расстояние должно регистрироваться не во время эксплуатации, потому что получающийся из этого расстояния износ, в любом случае, изменяется только постепенно. Поэтому предпочтительно, если расстояние регистрируется в состоянии останова, так как при этом получают также более точные результаты. Это позволяет также в особенно предпочтительном варианте осуществления использовать уже имеющийся сенсор положения каната в качестве сенсора каната для регистрации расстояния. При этом не требуются дополнительные издержки на оборудование. Это позволяет также своевременно заменять канатный ролик установки канатной дороги, когда износ превышает заданное допустимое предельное значение.
Чтобы повысить точность регистрации износа, может быть предусмотрена регистрация температуры канатного ролика и учет теплового расширения канатного ролика при регистрируемой температуре при регистрации расстояния. При этом могут учитываться или компенсироваться всевозможные обусловленные температурой тепловые расширения канатного ролика. При этом регистрация расстояния и вместе с тем также износа может также относиться к определенной референтной температуре.
В одном из предпочтительных вариантов осуществления расстояние измеряется несколько дней, предпочтительно каждый день или каждый x-вый день, где x ˃ 1, или с заданным временным интервалом, в частности, всегда в один и тот же момент времени полного дня. Это позволяет также регистрировать кривую изменения износа во времени. Из этой кривой изменения во времени могут получаться другие сведения об установке канатной дороги. Например, при слишком быстром износе канатного ролика на протяжении определенного периода времени может делаться заключение о другой проблеме установки канатной дороги.
Ниже настоящее изобретение поясняется подробнее со ссылкой на фиг.1-5, на которых в качестве примера, схематично и не ограничивающим образом показаны предпочтительные варианты осуществления изобретения. При этом показано:
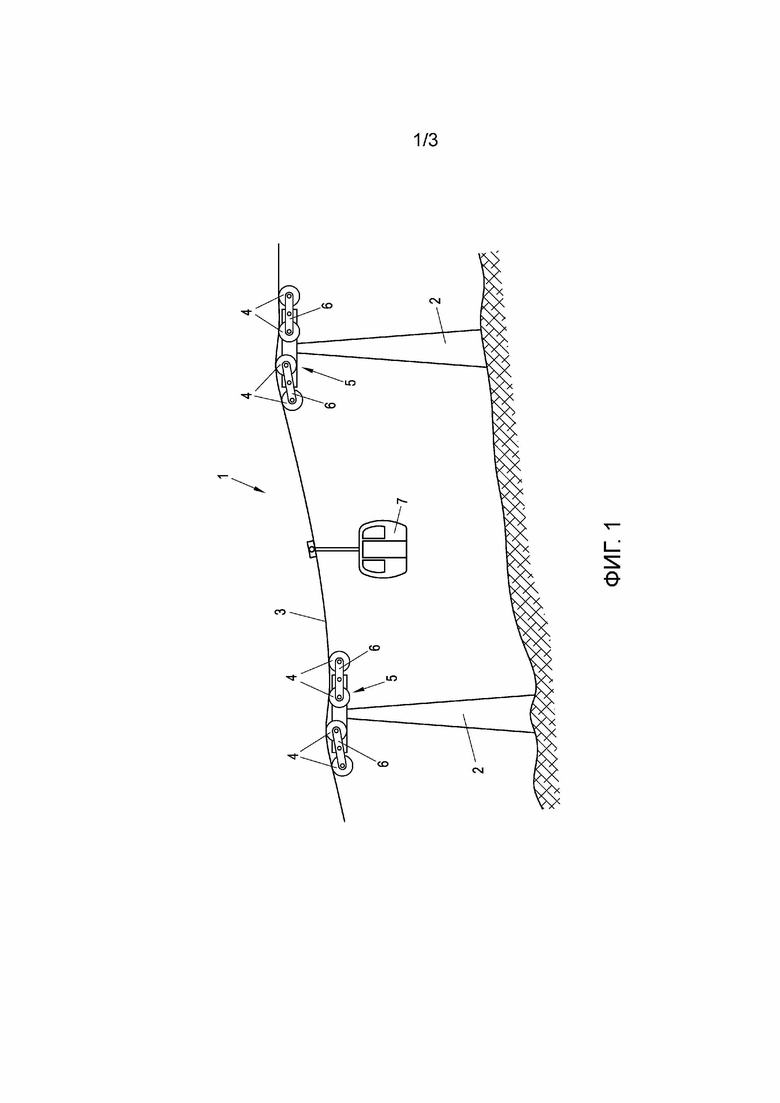
фиг.1: часть установки канатной дороги;
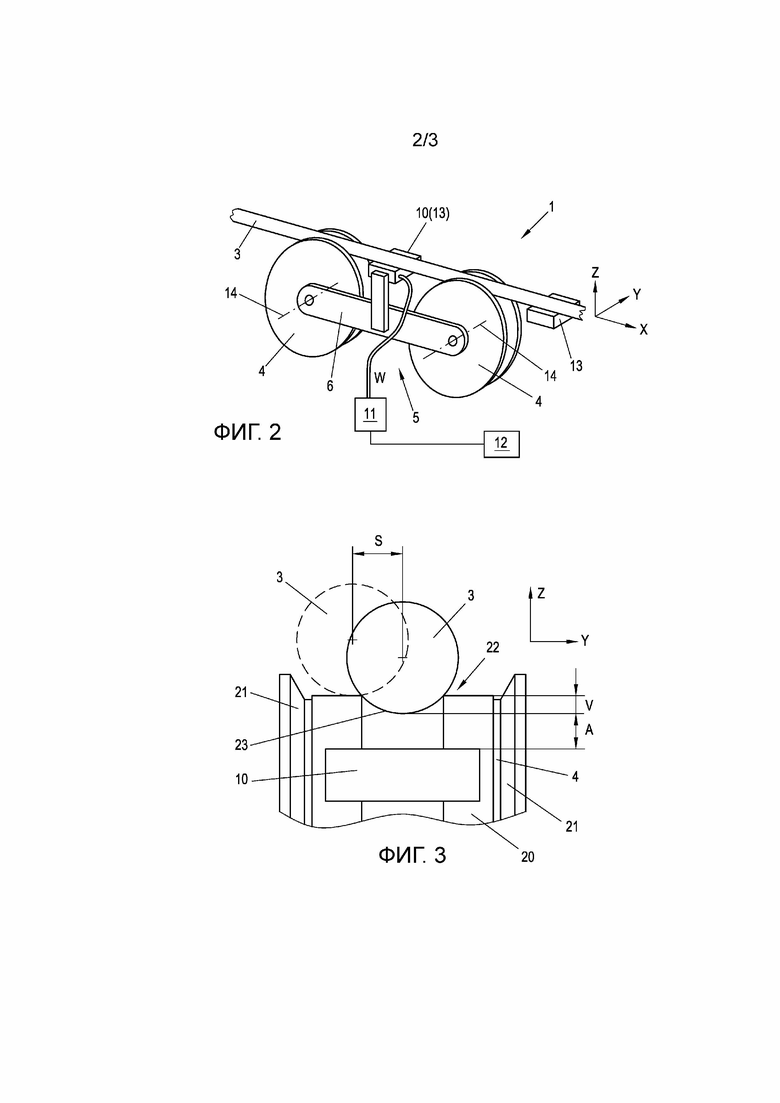
фиг.2: часть роликовой батареи установки канатной дороги;
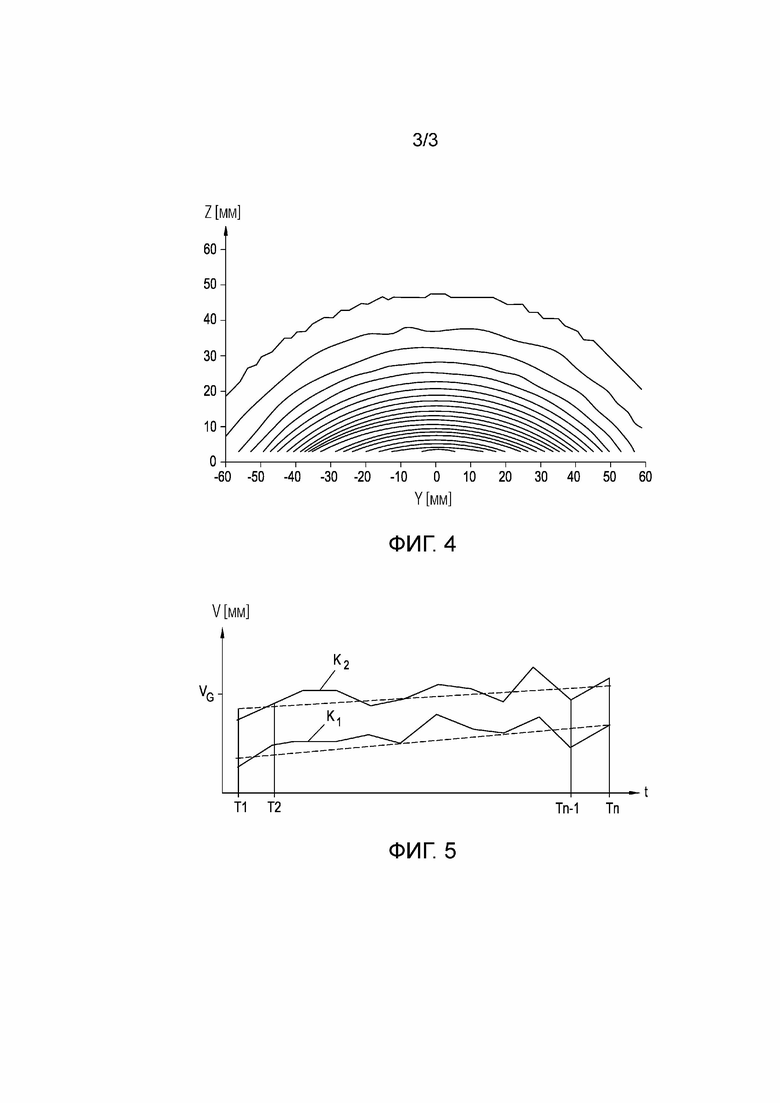
фиг.3: часть канатного ролика установки канатной дороги;
фиг.4: зона измерения бесконтактного сенсора каната;
фиг.5: кривая изменения во времени регистрируемого износа канатных роликов.
На фиг.1 изображена часть достаточно известной установки 1 канатной дороги, имеющая две опоры 2 канатной дороги. По меньшей мере один тяговый канат 3 направляется между двумя (не изображенными) станциями канатной дороги через канатные ролики 4, совершая либо кольцевое, либо маятниковое движение. Канатные ролики 4 в качестве примера оперты с возможностью вращения на роликовой батарее 5, расположенной на опоре 2 канатной дороги. Роликовая батарея 5 включает в себя, как правило, множество канатных роликов 4, расположенных друг за другом в направлении движения тягового каната 3. Канатный ролик 4, или группа канатных роликов 4, расположены также часто на балансирах 6, опертых с возможностью вращения на роликовой батарее 5. К тяговому канату 4 известным образом прикреплены зажимами множество транспортных средств 7, например, гондол или кресел, например, с помощью разъединяемых на станциях канатной дороги канатных зажимов или же фиксированным зажатием. Таким образом транспортные средства 7 движутся на тяговом канате 3 между станциями канатной дороги. Также на станции канатной дороги могут быть расположены несколько канатных роликов 4, через которые направляется тяговый канат 3.
На фиг.2 показана часть роликовой батареи 5, имеющей два канатных ролика 4. На установке 1 канатной дороги, например, на роликовой батарее 5, расположен по меньшей мере один бесконтактный сенсор 10 каната. Этот бесконтактный сенсор 10 каната расположен предпочтительно в известном, заданном положении относительно канатного ролика 4, в частности на заданном расстоянии A от тягового каната 3. Если бесконтактный сенсор 10 каната расположен на балансире 6, как на фиг.2, то бесконтактный сенсор 10 каната расположен на балансире 6 предпочтительно в заданном положении относительно канатных роликов 4. Если канатные ролики 4 оперты с возможностью вращения на роликовую батарею 5 неподвижно (то есть не на балансиры 6), то бесконтактный сенсор 10 каната предпочтительно расположен в заданном положении относительно канатных роликов 4 роликовой батареи 5. Но на роликовой батарее 5 могут быть также предусмотрены несколько бесконтактных сенсоров 10 каната, например, в области внешних, если смотреть в направлении X перемещения тягового каната 3, концов роликовой батареи 5. Но следует заметить, что канатный ролик 4, а также бесконтактный сенсор 10 каната могут быть также расположены, будучи оперты с возможностью вращения на другую стационарную часть установки 1 канатной дороги, например, в станции канатной дороги или в области въезда в станцию канатной дороги или выезда из нее или на коком-либо другом конструктивном элементе опоры 2 канатной дороги. Обычно на установке 1 канатной дороги распределенным образом расположены множество сенсоров 10 каната.
Бесконтактный сенсор 10 каната может быть сенсором, работающим по индуктивному или емкостному принципу, например, индуктивным или емкостным сенсором приближения, сенсором Холла или сенсором вихревого тока. Предпочтительно бесконтактный сенсор 10 каната служит одновременно сенсором положения каната для регистрации бокового увода в поперечном направлении Y (поперек направления X перемещения) тягового каната 3 на канатном ролике 4. В этом случае бесконтактный сенсор 10 каната предпочтительно также ориентирован в заданном боковом положении относительно канатного ролика 4. Но возможно также, чтобы был предусмотрен отдельный сенсор 13 положения каната (или же несколько сенсоров 13 положения каната), как обозначено на фиг.2.
Бесконтактный сенсор 10 каната соединен с оценочным блоком 11 (аппаратное обеспечение и/или программное обеспечение) для оценки регистрируемых им сенсорных значений, как еще будет описано в деталях ниже. При этом может быть предусмотрено, чтобы каждый бесконтактный сенсор 10 каната был соединен с собственным оценочным блоком 11, или чтобы несколько бесконтактных сенсоров 10 каната, например, сенсоров 10 каната одного (или же двух) направления X перемещения одной опоры 2 канатной дороги, были соединены каждый с одним оценочным блоком 11. Указанный по меньшей мере один оценочный блок 11 соединен с управлением 12 канатной дороги (аппаратное обеспечение и программное обеспечение), что может осуществляться как беспроводным, так и проводным путем. Управление 12 канатной дороги обычно расположено в станции канатной дороги. Оценочный блок 11 может также интегрироваться в управление 12 канатной дороги. В случае, если применяется собственный сенсор 13 положения каната, оценочный блок 11 может быть соединен одновременно также с сенсором 13 положения каната, чтобы регистрировать положение тягового каната 3 в поперечном направлении Y. Но может быть также предусмотрен собственный оценочный блок для сенсора 13 положения каната. Оценочный блок 11 может быть также интегрирован в сенсор 10 каната или сенсор 13 положения каната.
На фиг.3 показан канатный ролик 4 в деталях. Канатный ролик 4 обычно состоит по существу из центрального тела ролика (на фиг.3 не видно), которое расположено, будучи оперто с возможностью вращения посредством подшипника качения или другого подшипника на центральную опорную втулку (на фиг.3 не видна). На опорной втулке ролик 4 каната может располагаться на установке 1 канатной дороги. Конечно, опорная втулка могла бы также отсутствовать, и канатный ролик располагаться на установке 1 канатной дороги, будучи оперт с возможностью вращения прямо на подшипник. На теле ролика между двумя расположенными по бокам бортовыми кольцами 21 может быть расположено резиновое кольцо 20. Это резиновое кольцо 20 образует рабочую поверхность канатного ролика 4, в которой может быть предусмотрена канавка 23 для каната в виде углубления для направления тягового каната 3. Обычно резиновое кольцо 20 расположено с возможностью замены. Но, разумеется, и само тело ролика может образовывать рабочую поверхность 22 или бортовое кольцо 21 канатного ролика 4. При эксплуатации установки 1 канатной дороги может случиться, что тяговый канат 3 отклонится из канавки 23 для каната в поперечном направлении Y в сторону, как обозначено на фиг.3 штриховой линией. Такое отклонение S в поперечном направлении Y при эксплуатации установки 1 канатной дороги может распознаваться сенсором 13 положения каната.
Из фиг.3 явствует также, что тяговый канат 3 при прогрессирующем износе рабочей поверхности 22 все дальше врезается в рабочую поверхность 22 канатного ролика 4, поэтому тяговый канат 3 уходит в направлении оси 14 вращения канатного ролика 4. В целях безопасности допустим только определенный износ канатного ролика 4. С возрастающим износом углубление V канавки 23 для каната увеличивается. При слишком большом износе канатный ролик 4 или резиновое кольцо 20, или вообще образующая рабочую поверхность 22 часть канатного ролика 4, должна заменяться.
Бесконтактный сенсор 10 каната расположен в известном положении относительно канатного ролика 4, так что между тяговым канатом 3 и сенсором 10 каната получается расстояние A (в направлении Z нормально к направлению X перемещения и поперечному направлению Y). Предпочтительно сенсор 10 каната расположен в заданном положении относительно не изношенного канатного ролика 4, чтобы получить заданное референтное положение. Но это референтное положение может быть также установлено иначе. Если износ повышается, вследствие чего углубление V увеличивается, расстояние A уменьшается, поэтому износ рабочей поверхности 22 канатного ролика 4 может распознаваться в виде увеличения углубления V, когда расстояние A измеряется с помощью бесконтактного сенсора 10 каната.
Обычно регистрируемое сенсором 10 каната сенсорное значение W пересчитывается в оценочном блоке 11 в расстояние A (или эквивалентно в углубление V). Типичным образом расстояние A является кратчайшим отрезком между сенсором 10 каната и тяговым канатом, как правило, в направлении Z.
Чтобы снизить, или предпочтительно совсем устранить, влияние эксплуатации установки 1 канатной дороги на измерение расстояния, в соответствии с изобретением предусмотрено, что для распознавания износа используется только расстояние A, измеренное в состоянии покоя установки 1 канатной дороги. То есть это расстояние A измеряется при остановившемся тяговом канате 3. При остановившемся тяговом канате 3 можно принять, что тяговый канат 3 находится в канавке 23 для каната канатного ролика 4, и что тяговый канат 3 не колеблется или колеблется, только очень мало.
Кроме того, путем измерения расстояния A в состоянии останова установки 1 канатной дороги может уменьшаться, идеальным образом даже устраняться влияние температуры на измерение расстояния A. В состоянии останова не может происходить трение между тяговым канатом 3 и канатным роликом 4, поэтому канатный ролик 4 не подвергается дополнительному, вызываемому теплом трения тепловому расширению, что делает измерение расстояния A точнее. Следовательно, канатный ролик 4 и сенсор 10 каната имеют по существу одну и ту же температуру (по существу температуру окружающей среды), поскольку сенсор 19 каната не подвергается чрезмерному собственному нагреву смонтированной электроникой, или не возникает различное попадание солнечного излучения (например, вследствие затенения), поэтому нет нарушений измерения из-за разностей температур между температурой канатного ролика 4 и температурой сенсора 10 каната.
Могла бы также измеряться действующая при измерении расстояния A температура, например, посредством датчика температуры в сенсоре 10 каната или в окружающей среде канатного ролика 4, и измеренное расстояние A корректироваться по заданной референтной температуре (например, 21°C). При этом может, например, компенсироваться всевозможное тепловое расширение вследствие попадания солнечных лучей. Для этого при измеренной температуре может находиться тепловое расширение канатного ролика 4, например, посредством заложенных таблиц, математической модели или формулы, и при нахождении расстояния A учитываться обусловленное температурой расширение канатного ролика 4 (что изменяет расстояние A).
Предпочтительно расстояние A измеряется всегда в один и тот же момент времени полного дня, например, перед вводом в эксплуатацию установки 1 канатной дороги утром, предпочтительно до или спустя не слишком много времени после восхода солнца, или после вывода из эксплуатации установки 1 канатной дороги вечером, предпочтительно после захода солнца или не слишком задолго перед заходом солнца. Когда измерение осуществляется после вывода из эксплуатации, то предпочтительно измерение откладывается на определенное установленное время, например, один час, чтобы канатные ролики 4 могли остыть до температуры окружающей среды. Но так как к тепловому расширению канатных роликов 4 может приводить также попадание солнечных лучей, предпочтительно измерение осуществляется ночью (между заходом солнца и восходом солнца). Для измерения расстояния A может быть также установлен любой момент времени между выводом из эксплуатации и вводом в эксплуатацию, например, измерение всегда около полуночи. Так как износ будет выражаться в увеличении углубления V только постепенно, а также разрешение измерения сенсора 10 каната ограничено, может быть также достаточно, если расстояние A или, соответственно, связанное с ним углубление V измерялось не каждый полный день, а с большим временным интервалом, например, каждую неделю или каждый x-вый полный день, где x ˃ 1.
Но измерение расстояния A в состоянии останова установки 1 канатной дороги позволяет также особенно предпочтительным образом применять в качестве сенсора 10 каната традиционный бесконтактный сенсор 13 положения каната, который, в любом случае, уже смонтирован в современных установках 1 канатной дороги. В частности, в качестве сенсора 10 каната могут применяться бесконтактные сенсоры 13 положения каната особенно простой конструкции, с помощью которых на основании принципа измерения как такового не может распознаваться, уходит ли тяговый канат 3 влево, вправо (то есть в поперечном направлении) или вследствие износа в направлении Z относительно оси 14 вращения канатного ролика 4.
Одним из примеров такого бесконтактного сенсора 13 положения каната является индуктивный сенсор приближения. Индуктивные сенсоры приближения измеряют расстояние до объекта измерения бесконтактно, посредством индуцируемого напряжения. Например, питаемая переменным током сенсорная катушка сенсора образует вокруг сенсорной катушки электромагнитное поле. Когда электропроводящий объект измерения (здесь тяговый канат 3) попадает в это поле, в объекте измерения индуцируются вихревые токи, электромагнитные поля которых противодействуют электромагнитному полю, создаваемому сенсорной катушкой, вследствие чего изменяется импеданс сенсорной катушки. Это изменение находится в заданном отношении с дистанцией до объекта измерения и соответственно оценивается, например, электроникой или после цифрового преобразования соответствующим программным обеспечением. Конечно, могут применяться и другие принципы измерения.
Примерное поле характеристики измерения бесконтактного сенсора 10 каната, например, индуктивного сенсора приближения, изображено на фиг.4, на которой показаны линии постоянных сенсорных значений W в зависимости от положения объекта измерения (в поперечном направлении Y и направлении Z), относящиеся к сенсору 10 каната. При этом положение объекта измерения указано, начиная от нулевого положения Y=0 (например, положение канавки 23 для каната), влево (Y отрицательный) и вправо (Y положительный) и в виде расстояния в направлении Z между сенсором 20 каната и объектом измерения (тяговый канат 3). Из этого поля характеристик измерения понятно, что каждое зарегистрированное сенсорное значение W может восприниматься как увод влево, вправо или в направлении Z, но при этом из сенсорного значения W не может делаться заключение о конкретном положении объекта измерения относительно сенсора 10 каната. Но, несмотря на это, с помощью такого сенсора можно отличать поперечное направление Y от направления Z, потому что боковое отклонение тягового каната 3 в поперечном направлении Y увеличивает расстояние от тягового каната 3 до сенсора 10 каната, в то время как износ уменьшает расстояние от тягового каната 3 до сенсора 10 каната. Поэтому, начиная от известного референтного положения, по увеличению или уменьшению регистрируемого сенсорного значения может распознаваться отклонение в поперечном направлении Y и износ в направлении Z. Например, сенсорное значение при отклонении тягового каната 3 в поперечном направлении Y уменьшается, а при износе в направлении Z (то есть при приближении тягового каната 3 к сенсору 10 каната) увеличивается. При этом регистрируемое сенсорное значение W сенсора 10 каната может однозначно ставиться в соответствие боковому уводу тягового каната 3 в поперечном направлении Y или изменению расстояния A в направлении Z.
Одинаковые или похожие взаимосвязи могут также получаться при применении других принципов измерения. Но, в принципе, можно также применять сенсоры, которые могут отличать боковые уводы и изменения расстояния на основе принципа измерения или оценки сенсорных значений W. Но так как такие сенсоры более сложны и поэтому более дороги, обычно они не применяются у установок 1 канатных дорог, в частности, потому что у установки 1 канатной дороги, как правило, требуются множество сенсоров 10 каната (типичным образом на каждой опоре канатной дороги в каждом направлении тягового каната 3 по меньшей мере два таких сенсора 10 каната, что при двадцати опорах канатной дороги приводит уже к восьмидесяти сенсорам).
Для сенсора 10 каната при измерении в состоянии останова может приниматься, что тяговый канат 2 находится в канавке 23 для каната канатного ролика 4. При этом измеренное в состоянии останова сенсорное значение W в любом случае может ставиться в соответствие расстоянию A между сенсором 10 каната и тяговым канатом 3, совершенно независимо от вида сенсора 10 каната.
Так как сенсор 10 каната обычно расположен, будучи удален от канатного ролика 4 в направлении X перемещения, для повышения точности регистрируемое сенсорное значение W при известном расположении и геометрии канатного ролика 4 и сенсора 10 каната может пересчитываться в расстояние A (или эквивалентно в углубление V) или взаимосвязанное с ним значение износа.
Разумеется, с помощью сенсора 10 может надежно регистрироваться только износ канатных роликов 4, которые расположены в достаточной близости и в известном положении относительно сенсора 10 каната. Чем более удаленно расположен канатный ролик 4 от сенсора 10 каната, тем более неточной становится регистрация износа. Но вследствие известного расположения и геометрии канатных роликов 4 в области установки 1 канатной дороги, например, на роликовой батарее 5 или балансире 6, по зарегистрированным сенсорным значениям W сенсора 10 каната в области расположения канатных роликов 4 можно вполне делать расчет износа нескольких канатных роликов 4 этой системы.
Чтобы повысить точность, для нахождения износа (например, значения углубления V) канатного ролика 4 могли бы также оцениваться сенсорные значения W разных сенсоров 10 каната. Например, износ канатного ролика 4 мог бы находиться с помощью сенсорных значений W разных сенсоров 10 каната, которые тогда усредняются. Причем при усреднении могли бы также учитываться взвешивания, которые оценивают удаленность сенсора 10 каната от канатного ролика 4.
На фиг.5 в качестве примера изображена кривая K1, K2 изменения во времени углубления V на протяжении периода T1-Tn времени, который, например, покрывает период времени в 3 месяца, для двух канатных роликов 4. Начиная от углубления V вначале, в момент T1 времени, углубление V непрерывно увеличивается к концу периода времени при Tn.
Можно понять, что регистрируемое углубление V, несмотря на измерение в состоянии останова установки 1 канатной дороги, может подвергаться колебаниям, что может объясняться внешними влияниями или же неточностями измерения. Для выравнивания этих колебаний тенденция износа может также приближаться прямой регрессии (на фиг.5 обозначена штриховой линией), или какой-либо другой регрессией, чтобы можно было находить значение износа в каждый момент времени, в частности также между измерениями.
Может быть задано предельное значение VG допустимого износа, например, в виде максимально допустимого углубления V (в процентах или в виде абсолютного значения). Когда износ канатного ролика 4 достигает этого предельного значения VG, оценочным блоком 11 или управлением 12 канатной дороги может выдаваться сообщение для указания на необходимую смену канатного ролика 4 или резины 20 канатного ролика 4. Это сообщение может посылаться по надлежащей линии связи также в какое-либо удаленное место, например, в пункт технического обслуживания, из которого координируется техническое обслуживание.
Изобретение касается способа регистрации износа канатного ролика установки канатной дороги. Согласно способу регистрации износа по меньшей мере одного канатного ролика (4) установки (1) канатной дороги, имеющей тяговый канат (3), который направляется через указанный по меньшей мере один канатный ролик (4), и имеющей по меньшей мере один сенсор (10) каната, сенсор располагают в известном положении относительно канатного ролика (4) и с помощью него регистрируют расстояние (A) между тяговым канатом (3) и сенсором (10) каната. При этом расстояние (A) измеряют в состоянии останова установки (1) канатной дороги и по этому измеренному в состоянии останова расстоянию (A) делают заключение об износе указанного по меньшей мере одного канатного ролика (4). В результате улучшается распознавание износа канатного ролика установки канатной дороги, повышается надежность ее эксплуатации. 2 н. и 6 з.п. ф-лы, 5 ил.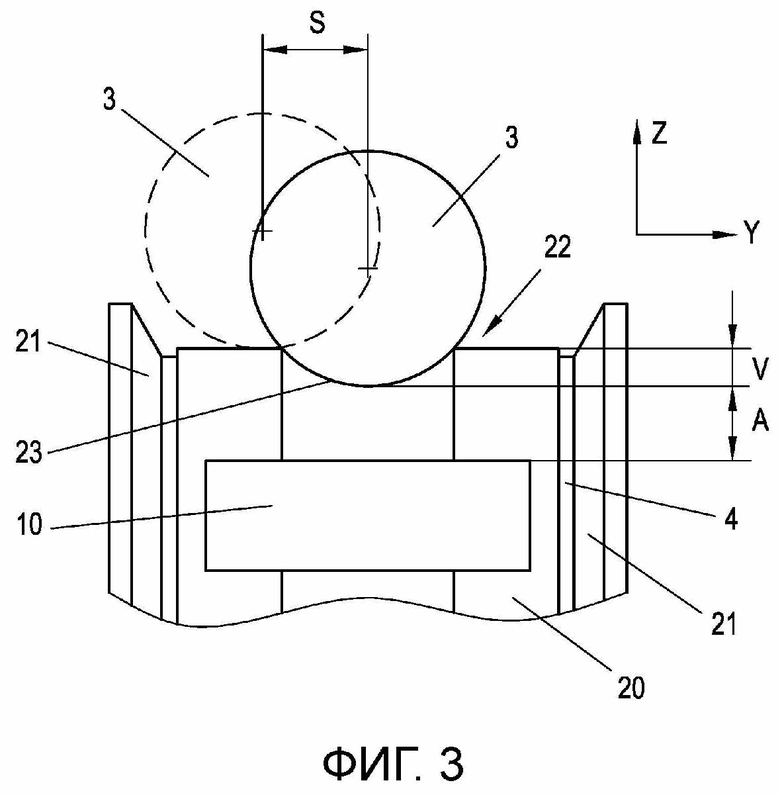
1. Способ регистрации износа по меньшей мере одного канатного ролика (4) установки (1) канатной дороги, имеющей тяговый канат (3), который направляется через указанный по меньшей мере один канатный ролик (4), и имеющей по меньшей мере один сенсор (10) каната, который располагают в известном положении относительно канатного ролика (4) и с помощью которого регистрируют расстояние (A) между тяговым канатом (3) и сенсором (10) каната, отличающийся тем, что расстояние (A) измеряют в состоянии останова установки (1) канатной дороги, и по этому измеренному в состоянии останова расстоянию (A) делают заключение об износе указанного по меньшей мере одного канатного ролика (4).
2. Способ по п.1, отличающийся тем, что регистрируют температура канатного ролика (4) и при регистрации расстояния (A) учитывают тепловое расширение канатного ролика (4) при регистрируемой температуре.
3. Способ по п.1 или 2, отличающийся тем, что с помощью указанного по меньшей мере одного сенсора (10) каната регистрируют износ по меньшей мере одного другого канатного ролика (4).
4. Способ по п.1 или 2, отличающийся тем, что износ указанного по меньшей мере одного канатного ролика (4) регистрируют с помощью по меньшей мере одного другого сенсора (10) каната и зарегистрированные разными сенсорами (10) каната износы усредняют с получением износа указанного по меньшей мере одного канатного ролика (4).
5. Способ по одному из пп.1-4, отличающийся тем, что расстояние (A) измеряют несколько дней, предпочтительно каждый день, или каждый x-вый день, где x ˃ 1, или с заданным временным интервалом.
6. Способ по п.5, отличающийся тем, что расстояние (A) измеряют всегда в один и тот же момент времени полного дня.
7. Способ по п.5 или 6, отличающийся тем, что регистрируют кривую изменения износа во времени.
8. Применение способа по одному из пп.1-7 для эксплуатации установки (1) канатной дороги, при этом канатный ролик (4) установки (1) канатной дороги заменяют, когда износ превышает заданное допустимое предельное значение (VG).
| DE 19752362 A, 17.06.1999 | |||
| US 5581180 A, 03.12.1996 | |||
| СИСТЕМА КОНТРОЛЯ ИЗНОСА, ТРАНСПОРТНАЯ УСТАНОВКА С КАНАТНЫМ ПРИВОДОМ И СПОСОБ КОНТРОЛЯ БЫСТРОИЗНАШИВАЮЩИХСЯ ДЕТАЛЕЙ ТАКОЙ ТРАНСПОРТНОЙ УСТАНОВКИ | 2009 |
|
RU2493989C2 |
| УСТРОЙСТВО И СПОСОБ КОНТРОЛЯ ПОЛОЖЕНИЯ КАНАТА В ТРАНСПОРТНОЙ СИСТЕМЕ С КАНАТНЫМ ПРИВОДОМ, И ТРАНСПОРТНАЯ СИСТЕМА С КАНАТНЫМ ПРИВОДОМ | 2008 |
|
RU2448854C2 |
| US 2005099176 A, 12.05.2005. | |||

