ТЕХНИЧЕСКАЯ ОБЛАСТЬ
[0001] Настоящее изобретение относится к системе управления наклоном крыла для электрического летательного аппарата с вертикальными взлетом и посадкой (ВВП). В частности, настоящее изобретение относится к системе и механизму управления наклоном крыла для электрического летательного аппарата с ВВП, имеющего пассажирское и/или военное применения.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
[0002] Летательные аппараты с ВВП могут взлетать и приземляться вертикально или под некоторым углом, близким к вертикальному. Этот тип летательного аппарата включает вертолеты и некоторые летательные аппараты с неподвижным крылом, которые часто используются для военных целей. Преимущественно, летательный аппарат с ВВП имеет возможность выполнять взлет и посадку в ограниченном пространстве, что исключает необходимость в большой взлетно-посадочной полосе, и позволяет выполнять взлет и посадку в небольших пространствах, таких как палубы кораблей и посадочные площадки на зданиях и других сооружениях.
[0003] Вертолеты представляют собой тип летательного аппарата, в котором подъем и тяга обеспечиваются с помощью роторов. Имеется несколько недостатков, связанных с вертолетами, которые могут быть проблематичными в некоторых применениях, например, высокий уровень шума. Один из таких недостатков, связанных с вертолетами, касается конструкции ротора, которая имеет решающее значение для полета. Обычно в конструкции нет избыточности, что означает, что работа указанного (или каждого) ротора является критической по условиям безопасности полетов. Это отсутствие избыточности диктует необходимость применения больших факторов безопасности ко всем компонентам ротора и приводного механизма, что значительно увеличивает вес и стоимость производства вертолетов.
[0004] Электрические летательные аппараты вызывают все больший интерес по различным коммерческим причинам и причинам безопасности. В последние годы был достигнут большой прогресс в области технологий беспилотников, в которых обычно используется несколько электрических роторов, расположенных на расстоянии друг от друга по диаметру окружности. Беспилотники обычно работают с электрическими роторами, каждый из которых вращается вокруг оси, которая обычно является вертикальной.
[0005] Несмотря на то, что беспилотники становятся коммерчески перспективными для доставки небольших полезных грузов, они обычно ограничены относительно низкими скоростями полета из-за вертикальной оси вращения роторов. Кроме того, они обычно имеют достаточно низкие диапазоны дальности полета, рассчитанные из заряда аккумуляторной батареи.
[0006] Летательные аппараты с наклонным крылом известны, и обычно они работают по принципу вертикальной оси воздушного винта для взлета и посадки, а крылья выполнены с возможностью наклона между конфигурацией, в которой воздушные винты имеют вертикальные оси для взлета и посадки, и конфигурацией, в которой воздушные винты имеют горизонтальные оси для полета вперед.
[0007] Вышеуказанное расположение наклонных крыльев обеспечивает преимущество взлета и посадки в областях с ограниченным доступным свободным пространством, таких как авианосцы и посадочные площадки. Кроме того, летательные аппараты с наклонным крылом способны иметь скорость полета, сопоставимую с обычными самолетами с неподвижным крылом, управляемыми воздушным винтом.
[0008] Летательные аппараты с наклонным крылом обычно имеют электродвигатели или газотурбинные двигатели, которые приводят в движение воздушные винты или турбореактивные двигатели, непосредственно установленные на крыле. Все крыло целиком поворачивается между вертикалью и горизонталью для наклона вектора тяги от вертикали к горизонтали и обратно.
[0009] В порядке определения, «линия тяги», также называемая «вектором тяги», является силой тяги воздушного винта и приблизительно совпадает с осью вращения воздушного винта. «Ось шарнира» - это ось поворота шарнира.
[0010] Имеется несколько характерных недостатков существующих летательных аппаратов с наклонным крылом. Один недостаток касается приводов и подшипников или других подобных механизмов, необходимых для управления углом наклона крыла между конфигурацией взлета / посадки и конфигурацией полета вперед. Приводы также могут служить для блокировки крыла при желаемом наклоне во время полета вперед. Однако на практике приводы и подшипники значительно увеличивают вес летательного аппарата. Это приводит к уменьшению количества полезного груза, такого как экипаж или груз, который может быть транспортирован. Кроме того, из-за критической природы системы управления наклоном крыла и подшипников этот узел должен быть спроектирован с достаточной степенью избыточности, чтобы снизить риск катастрофического отказа.
[0011] В настоящее время электрический летательный аппарат с ВВП разрабатывается и испытывается компанией Lilium Aviation под товарным знаком Lilium Jet™. Этот прототип предназначен в качестве легкого пригородного летательного аппарата для двух пассажиров, имеет два крыла и около 36 электродвигателей.
[0012] Недостаток летательного аппарата типа Lilium Jet™ касается электродвигателей, которые являются электродвигателями закрытого вентиляторного типа. Это устройство очень энергоемкое, что приводит к уменьшению возможной дальности полета для заданного размера аккумуляторной батареи.
[0013] Кроме того, закрытые вентиляторы могут использоваться только для взлета и посадки на твердых поверхностях, таких как предназначенные для этого посадочные площадки и взлетно-посадочные полосы. Это ограничивает удобство использования летательного аппарата и не позволяет эксплуатировать его во время взлета и посадки на нетвердых поверхностях, таких как парки, поля и сады. Для военных применений это нежелательно и не учитывает импровизированные посадки в удаленных местах.
[0014] Другой концепцией летательного аппарата с ВВП является S2 electric™ от Joby Aviation. Эта конструкция имеет неподвижные крылья с множеством электродвигателей, предпочтительно четырьмя, закрепленных на каждом крыле. Четыре дополнительных электродвигателя крепятся к заднему стабилизатору или хвосту. Недостатком этой концепции летательного аппарата является то, что каждый электродвигатель приводится в действие независимо, при этом для каждого электродвигателя требуется отдельный привод. Как было отмечено выше, это требует значительного дополнительного веса для системы привода электродвигателя.
ЦЕЛЬ ИЗОБРЕТЕНИЯ
[0015] Цель настоящего изобретения состоит в том, чтобы по существу преодолеть или по меньшей мере уменьшить один или несколько из указанных выше недостатков или предложить полезную альтернативу.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0016] В первом аспекте настоящего изобретения предложен летательный аппарат с вертикальными взлетом и посадкой (ВВП), содержащий:
фюзеляж,
первое и второе передние крылья, установленные на противоположных сторонах фюзеляжа,
первое и второе задние крылья, установленные на противоположных сторонах фюзеляжа,
причем каждое крыло имеет неподвижную переднюю кромку и заднюю управляющую поверхность, которая выполнена с возможностью поворота вокруг в целом горизонтальной оси,
электродвигатели с роторами, установленные на крыльях, причем роторы выполнены с возможностью поворота вместе с задней управляющей поверхностью между первым положением, в котором каждый ротор имеет в целом вертикальную ось вращения, и вторым положением, в котором каждый ротор имеет в целом горизонтальную ось вращения;
при этом по меньшей мере одно из крыльев имеет первый электродвигатель с первым ротором и второй электродвигатель со вторым ротором, каждый из которых установлен так, что их оси вращения не параллельны, так что линии тяги первого и второго роторов отличаются.
[0017] Линия тяги первого ротора предпочтительно наклонена так, что она проходит над осью шарнира, а линия тяги второго ротора наклонена так, что она проходит под осью шарнира.
[0018] Ось вращения первого ротора предпочтительно наклонена вверх относительно плоскости, проходящей через переднюю и заднюю части управляющей поверхности, а ось вращения второго ротора наклонена вниз относительно плоскости, проходящей через переднюю и заднюю части управляющей поверхности.
[0019] Когда первый и второй роторы работают с одинаковыми скоростями вращения, крутящие моменты, генерируемые каждым из первого и второго роторов и воздействующие на управляющую поверхность, предпочтительно взаимно компенсируются.
[0020] Первый и второй электродвигатели предпочтительно установлены на нижней стороне неподвижной передней кромки с возможностью поворота.
[0021] Первый и второй электродвигатели предпочтительно прикреплены к задней управляющей поверхности.
[0022] Во втором аспекте настоящего изобретения предложен летательный аппарат с вертикальными взлетом и посадкой (ВВП), содержащий:
фюзеляж,
первое и второе передние крылья, установленные на противоположных сторонах фюзеляжа,
первое и второе задние крылья, установленные на противоположных сторонах фюзеляжа,
причем каждое крыло имеет неподвижную переднюю кромку и заднюю управляющую поверхность, которая выполнена с возможностью поворота вокруг в целом горизонтальной оси,
электродвигатели, каждый из которых имеет роторы, установленные на крыльях, причем электродвигатели и роторы выполнены с возможностью поворота вместе с задней управляющей поверхностью между первым положением, в котором каждый ротор имеет в целом вертикальную ось вращения, и вторым положением, в котором каждый ротор имеет в целом горизонтальную ось вращения,
при этом по меньшей мере одно из крыльев имеет первый электродвигатель с первым ротором и второй электродвигатель со вторым ротором, которые смещены относительно верхней и нижней поверхностей крыла.
[0023] Предпочтительно, первый ротор расположен под нижней поверхностью крыла, а второй ротор расположен над верхней поверхностью крыла.
[0024] Электродвигатели и роторы предпочтительно распределены вдоль крыла чередующимся образом в положениях под нижней поверхностью крыла и над верхней поверхностью крыла.
[0025] Дистальная часть каждого переднего крыла, наиболее удаленная от фюзеляжа, предпочтительно соединена с дистальной частью смежного заднего крыла с помощью соединительного элемента, образуя рамную конструкцию крыла.
[0026] Каждое переднее крыло предпочтительно соединено со смежным задним крылом одной или несколькими распорками или расчалками.
[0027] Управляющая поверхность предпочтительно может поворачиваться в диапазоне между приблизительно 80 и 100 градусами. Управляющая поверхность предпочтительно может поворачиваться на угол приблизительно 90 градусов.
[0028] В третьем аспекте настоящего изобретения предложен летательный аппарат с вертикальными взлетом и посадкой (ВВП), содержащий:
фюзеляж,
первое и второе передние крылья, установленные на противоположных сторонах фюзеляжа,
первое и второе задние крылья, установленные на противоположных сторонах фюзеляжа,
причем каждое переднее крыло соединено со смежным задним крылом с помощью дистального соединительного элемента или расчалки (расчалок), образуя рамную конструкцию крыла или расчаленную конструкцию крыла,
при этом каждое крыло имеет неподвижную переднюю кромку и заднюю управляющую поверхность, которая выполнена с возможностью поворота вокруг в целом горизонтальной оси,
электродвигатели с роторами, установленными на крыльях, причем электродвигатели с роторами выполнены с возможностью поворота вместе с задней управляющей поверхностью между первым положением, в котором каждый ротор имеет в целом вертикальную ось вращения, и вторым положением, в котором каждый ротор имеет в целом горизонтальную ось вращения.
[0029] По меньшей мере одно из крыльев предпочтительно имеет первый электродвигатель с первым ротором и второй электродвигатель со вторым ротором, которые смещены относительно верхней и нижней поверхности крыла.
[0030] Первый электрический ротор предпочтительно расположен под нижней поверхностью крыла, а второй электрический ротор предпочтительно расположен над верхней поверхностью крыла.
[0031] Электродвигатели и роторы предпочтительно распределены вдоль крыла чередующимся образом в положениях под нижней поверхностью крыла и над верхней поверхностью крыла.
[0032] В четвертом аспекте настоящего изобретения предложен летательный аппарат с вертикальными взлетом и посадкой (ВВП), содержащий:
фюзеляж,
первое и второе передние крылья, установленные на противоположных сторонах фюзеляжа, при этом каждое крыло имеет неподвижную переднюю кромку и заднюю управляющую поверхность, которая выполнена с возможностью поворота вокруг в целом горизонтальной поворотной оси,
причем каждое крыло имеет первый электродвигатель с первым ротором и второй электродвигатель со вторым ротором, при этом электродвигатели и роторы расположены с возможностью поворота вместе с задней управляющей поверхностью между первым положением, в котором каждый ротор имеет в целом вертикальную ось вращения, и вторым положением, в котором каждый ротор имеет в целом горизонтальную ось вращения,
систему управления для управления каждым двигателем и ротором,
при этом система управления выполнена с возможностью выборочного приведения в действие первого электродвигателя и первого ротора и второго электродвигателя и второго ротора с разными скоростями вращения, чтобы генерировать крутящий момент для поворота управляющей поверхности вокруг поворотной оси.
[0033] По меньшей мере одно из крыльев предпочтительно имеет первый и второй электрические роторы, причем линия тяги первого электрического ротора расположена под углом, так что она проходит над осью шарнира, а линия тяги второго электрического ротора расположена под углом, так что она проходит под осью шарнира.
[0034] Электрические роторы предпочтительно расположены на нижней стороне каждого крыла.
[0035] Каждый ротор предпочтительно смещен в продольном направлении относительно смежного ротора, установленного на том же самом крыле, относительно оси вращения роторов.
[0035а] Наружный диаметр каждого ротора предпочтительно перекрывается с наружным диаметром смежного ротора и установлен на том же самом крыле, если смотреть в плоскости, проходящей перпендикулярно оси вращения роторов.
[0035b] Фюзеляж предпочтительно имеет кабину, доступ к которой осуществляется через дверь, обращенную вперед и шарнирно закрепленную в верхней области для открывания вверх.
[0035с] Каждое из первого и второго задних крыльев предпочтительно содержит направленную вниз и назад законцовку, имеющую одно или несколько колес для поддержки самолета.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0035d] Ниже описан предпочтительный вариант выполнения изобретения посредством конкретного примера со ссылкой на прилагаемые чертежи, на которых:
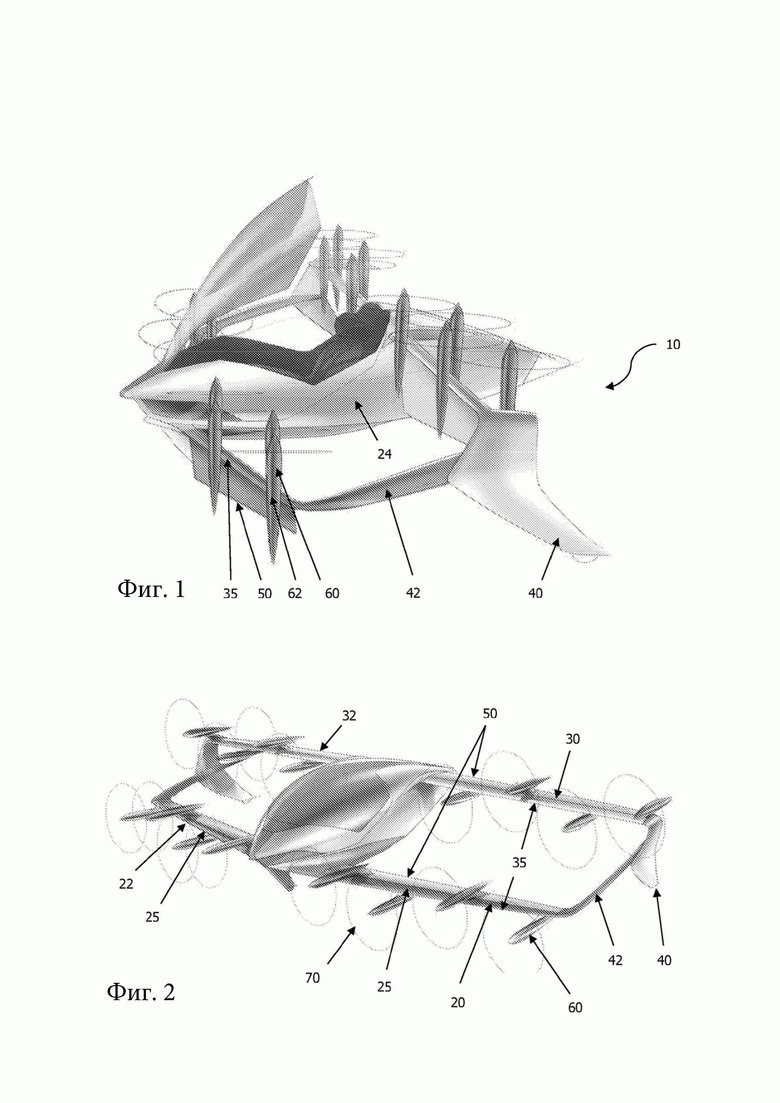
[0035е] Фиг. 1 изображает принципиальную схему, изображающую летательный аппарат с вертикальными взлетом и посадкой (ВВП), выполненный в соответствии с настоящим изобретением, в конфигурации взлета и посадки;
[0036] Фиг. 2 изображает принципиальную схему, изображающую летательный аппарат ВВП, показанный на Фиг. 1, во второй конфигурации, а именно полета вперед;
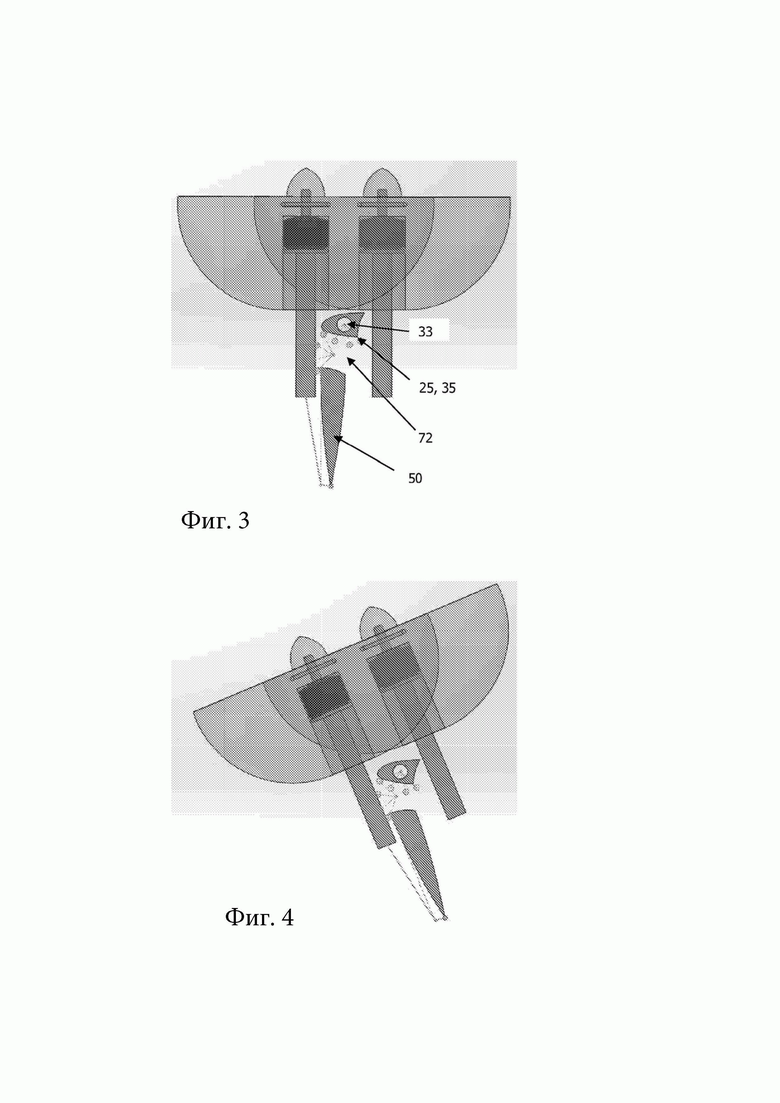
[0037] Фиг. 3 изображает схематический вид, показывающий конфигурацию для установки электродвигателя на крыло летательного аппарата, изображенного на Фиг. 1 и 2, с ротором в вертикальном положении (для взлета и посадки);
[0038] Фиг. 4 изображает еще один схематический вид устройства, показанного на Фиг. 3, с ротором в частично наклонном положении.
[0039] Фиг. З изображает еще один схематический вид устройства, показанного на Фиг. 3, с ротором в еще более наклонном положении.
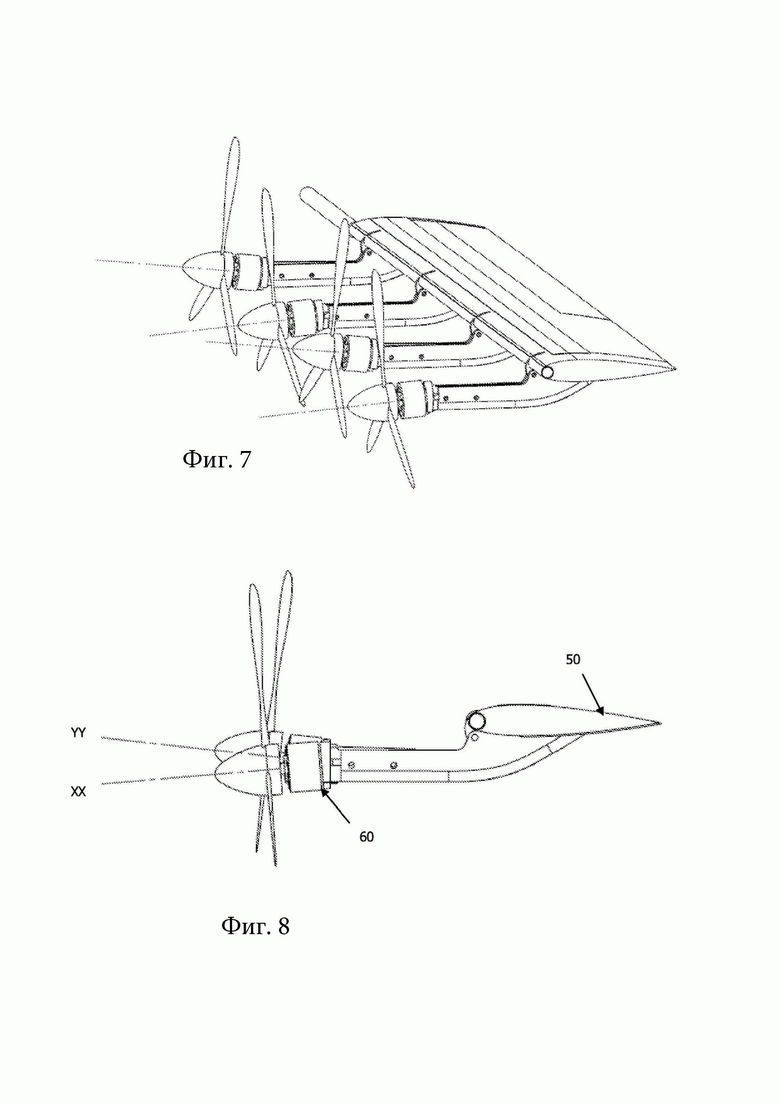
[0040] Фиг. 6 изображает еще один схематический вид устройства, показанного на Фиг. 3, с ротором в горизонтальном положении (для полета вперед);
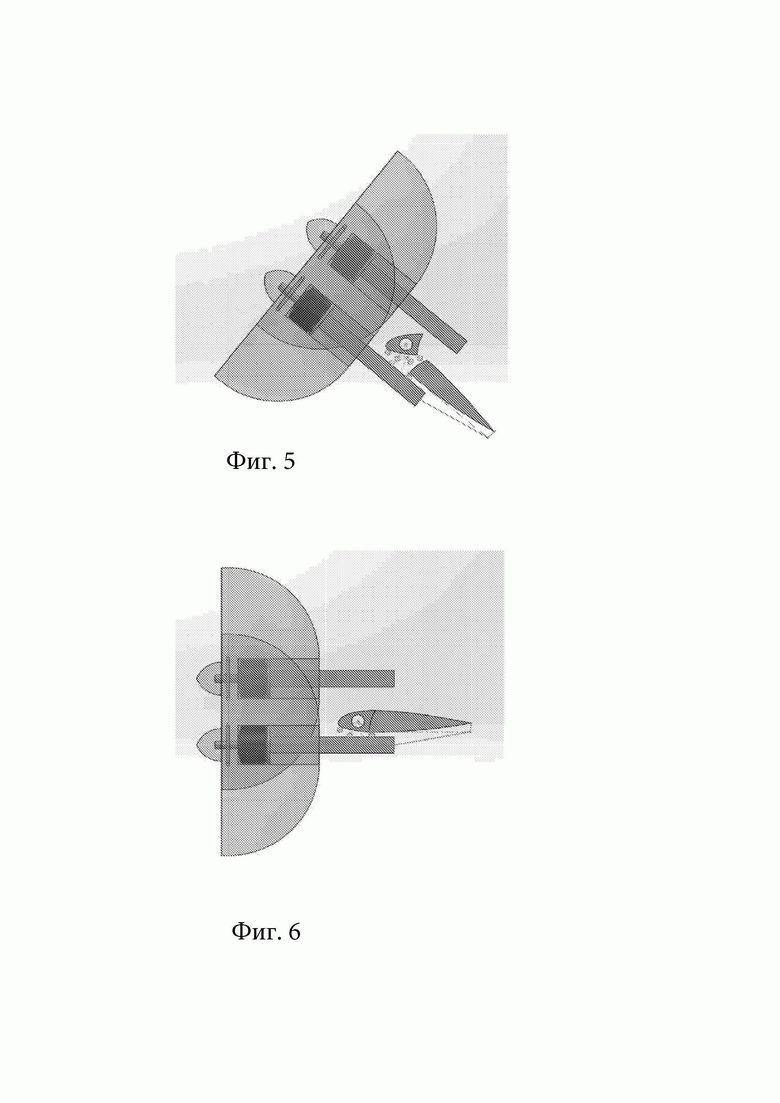
[0041] Фиг. 7 изображает вид в аксонометрии, изображающий еще один вариант выполнения летательного аппарата с ВВП;
[0042] Фиг. 8 изображает вид сбоку конструкции крыла летательного аппарата, показанного на Фиг. 7;
[0043] Фиг. 9 изображает вид сверху конструкции крыла летательного аппарата, показанного на Фиг. 7;
[0044] Фиг. 10 изображает вид в аксонометрии конструкции крыла летательного аппарата, показанного на Фиг. 7, с убранными лопастями ротора;
[0045] Фиг. 11А изображает схематический вид сбоку, показывающий конфигурацию для установки электродвигателя на крыло летательного аппарата (вертикальная ось ротора);
[0046] Фиг. 11В изображает вид в аксонометрии конфигурации, изображенной на Фиг. 11А;
[0047] Фиг. 11С изображает схематический вид сбоку, показывающий конфигурацию, показанную на Фиг. 11А, но с вертикальной осью ротора;
[0048] Фиг. 11D изображает вид в аксонометрии конфигурации, изображенной на Фиг. 11С;
[0049] Фиг. 12 изображает схематический вид в разрезе, показывающий переход между вертикальным и горизонтальным положениями для расположения крыльев летательного аппарата, изображенного на любом из Фиг. 7 - 11D; и
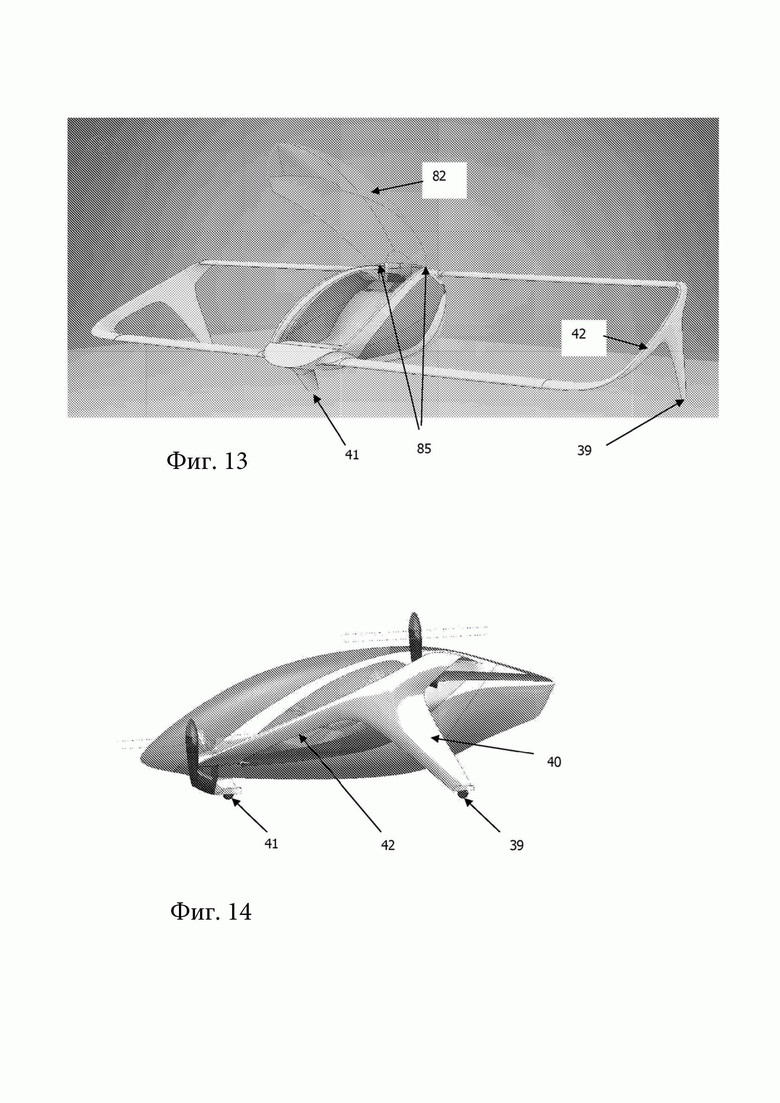
[0050] Фиг. 13 изображает схематический вид в аксонометрии летательного аппарата в припаркованной конфигурации с открытым люком доступа;
[0051] Фиг. 14 изображает вид сбоку летательного аппарата с роторами, изображенными в положении с вертикальной осью;
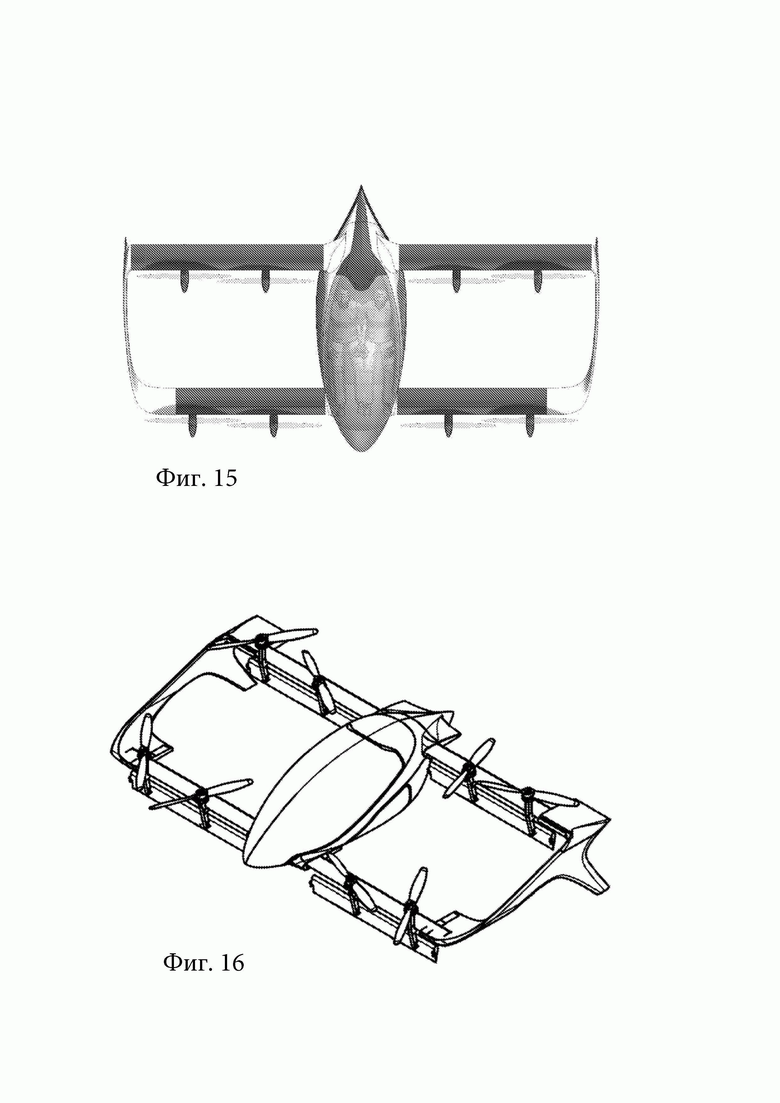
[0052] Фиг. 15 изображает вид сверху летательного аппарата с роторами, изображенными в положении с горизонтальной осью;
[0053] Фиг. 16 изображает вид в аксонометрии летательного аппарата с роторами, изображенными в положении с вертикальной осью; и
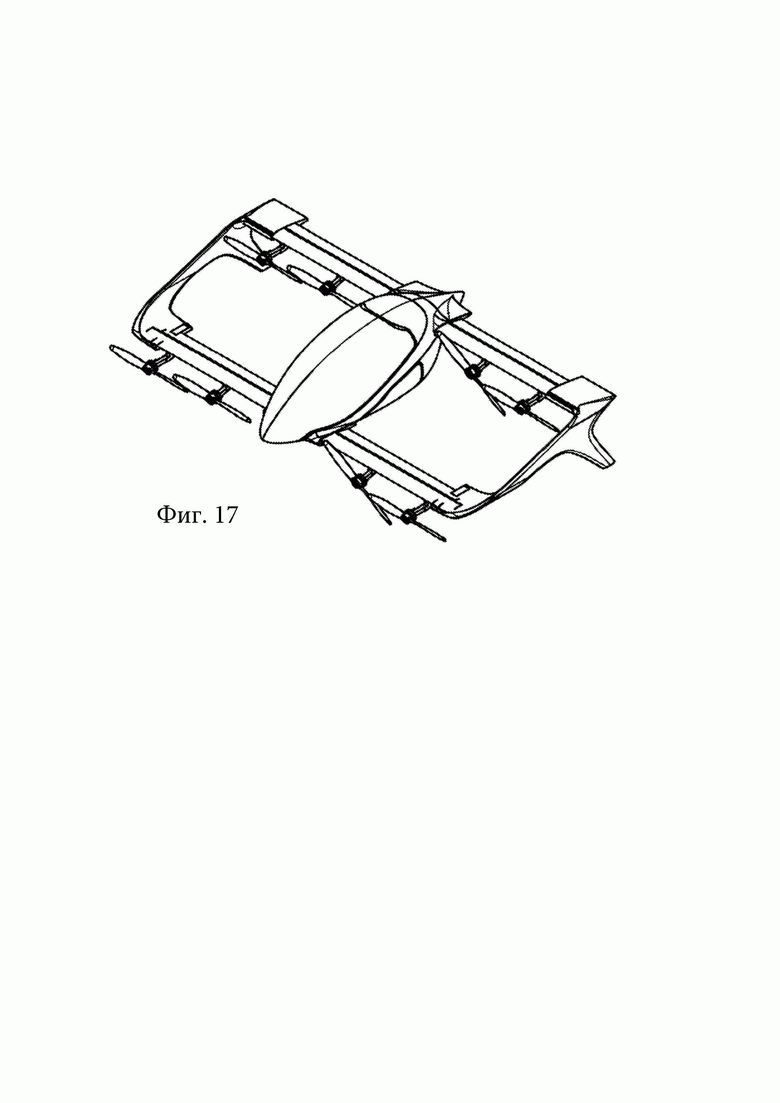
[0054] Фиг. 17 изображает вид спереди летательного аппарата с роторами, изображенными в положении с горизонтальной осью.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ВЫПОЛНЕНИЯ
[0055] Раскрыт летательный аппарат 10 с вертикальными взлетом и посадкой (ВВП). В предпочтительном варианте выполнения, как изображено на чертежах, имеются две пары крыльев, а именно, передние крылья 20, 22 и задние крылья 30, 32. Каждое из передних крыльев 20, 22 прикреплено к противоположной в поперечном направлении области фюзеляжа 24. Аналогично, каждое из задних крыльев 30, 32 прикреплено к противоположной в поперечном направлении области фюзеляжа 24. В варианте выполнения, показанном на чертежах, летательный аппарат 10 изображен как одноместный летательный аппарат 10 или двухместный летательный аппарат 10. Однако также предусмотрены более крупные варианты для нескольких человек. Летательный аппарат 10 может управляться изнутри пилотом или, в качестве альтернативы, он может управляться дистанционно.
[0056] В варианте выполнения, показанном на чертежах, дистальные части передних крыльев 20, 22 и задних крыльев 30, 32 соединены с помощью соединительных элементов или перемычек 42, так, что две пары крыльев 20, 22, 30, 32 образуют рамную конструкцию крыла или замкнутую конструкцию крыла.
[0057] В другом варианте выполнения (не показан) передние крылья 20, 22 и задние крылья 30, 32 могут быть расчаленными крыльями, соединенными расчалками и распорками. Расчаленное крыло, как правило, легче, чем обычное свободнонесущее крыло.
[0058] Несмотря на то, что летательный аппарат 10 с ВВП, описанный в настоящем документе, представляет собой летательный аппарат 10 с рамным крылом или с расчаленным крылом, специалистам в данной области техники будет понятно, что летательный аппарат 10 может представлять собой обычный летательный аппарат со свободнонесущим крылом, в котором передние крылья 20, 22 и задние крылья 30, 32 являются отдельными и не связаны между собой. Кроме того, летательный аппарат 10 может иметь только одну пару крыльев.
[0059] Как показано на чертежах, передние крылья 20, 22 и задние крылья 30, 32 имеют разное положение по вертикали, так что передние крылья 20, 22 расположены вертикально под задними крыльями 30, 32.
[0060] Как показано на Фиг. 2, кончик 40 задних крыльев 30, 32 проходит вниз и назад. Эта часть кончика крыла, или законцовка 40, способствует уменьшению вихрей, создаваемых кончиком крыла. Законцовки 40 могут содержать одно или несколько колес 39 (Фиг. 13 и 14) для поддержки летательного аппарата 10 в неподвижном состоянии, а также во время взлета и посадки. Летательный аппарат 10 также имеет дополнительное колесо или набор колес 41, которые расположены под фюзеляжем 24, обычно рядом с передней частью фюзеляжа 24. Таким образом, задние колеса 39 и передние колеса 41 расположены в вершинах равнобедренного треугольника. Благодаря размещению задних колес 39 на законцовках 40 ширина вышеупомянутого равнобедренного треугольника увеличивается до максимума, что повышает устойчивость летательного аппарата 10.
[0061] Как показано на виде сбоку, изображенном на Фиг. 14, законцовка 40 и соединительный элемент 42 вместе образуют в целом Т-образную часть узла крыла.
[0062] Применительно к вариантам выполнения, изображенным на Фиг. 13-17, доступ к кабине осуществляется через дверь или люк 82, который шарнирно закреплен сверху над пассажирами посредством шарниров 85. В варианте выполнения, показанном на Фиг. 13-18, имеются два шарнира 85, и люк 82 открывается вверх.
[0063] Конструкция расположенного сверху шарнира 85 для крепления люка 82 и самого открывающегося вверх люка 82 обеспечивает несколько функциональных преимуществ. Во-первых, эта конфигурация позволяет пользователям получать доступ к кабине с передней стороны летательного аппарата 10, не приближаясь к роторам 70. Такая конструкция делает выход из летательного аппарата 10 особенно простым, поскольку пользователь просто встает из сидячего положения и перемещается вперед, дальше от летательного аппарата 10.
[0064] Открывающийся вверх люк 82 также обеспечивает улучшенную защиту от дождя во время входа и выхода, так как люк в открытом положении обычно остается над кабиной.
[0065] Кроме того, люк 82 позволяет расположить переднюю часть кабины близко к расположенной ниже поверхности земли. Высота ступеньки от расположенной ниже поверхности земли для входа в кабину составляет около 250 мм, что представляет собой значительное улучшение комфорта и простоты входа / выхода по сравнению с другими легкими летательными аппаратами.
[0066] Как показано на Фиг. 2, проксимальная сторона каждой законцовки 40 соединена с соединительным элементом 42, который соединяет смежные переднее крыло 20 и заднее крыло 30. Еще один соединительный элемент 42 соединяет смежные переднее крыло 22 и заднее крыло 32 на противоположной стороне фюзеляжа 24.
[0067] Каждое из передних крыльев 20, 22 и задних крыльев 30, 32 имеет неподвижную переднюю кромку 25, 35. Передняя кромка 25, 35 имеет изогнутый профиль в виде части аэродинамического профиля. Важно отметить, что передняя кромка не поворачивается и не перемещается иным образом относительно фюзеляжа 24.
[0068] На задней стороне каждой неподвижной передней кромки 25, 35 передние крылья 20, 22 и/или задние крылья 30, 32 имеют установленный с возможностью поворота элерон или управляющую поверхность 50. Каждая управляющая поверхность 50 выполнена с возможностью поворота между обычно вертикальной конфигурацией для взлета и посадки (как показано на Фиг. 1) и в целом горизонтальной конфигурацией для полета вперед (как показано на Фиг. 2).
[0069] Управляющая поверхность 50 может представлять собой единую поверхность, которая непрерывно проходит по всей длине крыла 20, 22, 30, 32. В качестве альтернативы, каждое крыло 20, 22, 30, 32 может иметь одну или несколько независимо поворачивающихся управляющих поверхностей 50, так что управляющие поверхности 50 могут поворачиваться вокруг передней кромки 25, 35 независимо от других поверхностей 50.
[0070] Летательный аппарат 10 с вертикальными взлетом и посадкой (ВВП) содержит множество электродвигателей 60. Каждый двигатель 60 имеет воздушный винт или ротор 70. Как изображено на чертежах, корпус 62 каждого двигателя 60 установлен вблизи верхней поверхности или нижней поверхности подвижной управляющей поверхности 50, как правило, перед неподвижной передней кромкой 25, 35. Управляющая поверхность 50 может поворачиваться в диапазоне между приблизительно 80 и 100 градусами, и предпочтительно приблизительно 90 градусов как для режима горизонтального полета (Фиг. 2), так и для режима вертикального полета (Фиг. 1).
[0071] Двигатели 60 могут быть установлены выступающими значительно вперед от неподвижной передней кромки 25, 35, так что лопасти ротора могут складываться назад и оставаться вдалеке от конструкции крыла. Тем не менее, предпочтительный вариант выполнения использует не складывающиеся роторы 70 с механизмом переменного шага. Также можно использовать лопасти с постоянным шагом.
[0072] Существует два возможных варианта установки двигателей 60 и управляющей поверхности 50:
а) Каждый двигатель 60 может быть с возможностью поворота соединен с одной из неподвижных передних кромок 25, 35, а управляющая поверхность 50 прикреплена к корпусу 62 двигателя 60; или
б) Управляющая поверхность 50 может быть с возможностью поворота соединена с одной из неподвижных передних кромок 25, 35, при этом управляющая поверхность прикреплена к корпусу 62 двигателя 60.
[0073] Каждый из электродвигателей 60 вместе с управляющими поверхностями 50 выполнен с возможностью поворота вокруг передней кромки 25, 35 между первым положением, в котором ротор каждого двигателя 60 имеет в целом вертикальную ось вращения, и вторым положением, в котором каждый ротор каждого двигателя 60 имеет в целом горизонтальную ось вращения.
[0074] В варианте выполнения, изображенном на Фиг. 1 -6, по меньшей мере одно из крыльев 20, 22, 30, 32 имеет первый и второй двигатели 60, которые смещены относительно друг друга относительно плоскости, проходящей через управляющую поверхность 50. В варианте выполнения, показанном на Фиг. 1-6 чертежей, это достигается путем расположения двигателей 60 на противоположных верхней и нижней сторонах крыла 20, 22, 30, 32. В варианте выполнения, изображенном на Фиг. 1-6, каждое крыло имеет четыре электродвигателя 60. А именно: два электродвигателя 60, установленных над крылом 20, 22, 30, 32, и два электродвигателя, установленных под крылом 20, 22, 30, 32, в чередующейся конфигурации. В другом варианте каждое крыло 20, 22, 30, 32 имеет два электродвигателя 60.
[0075] Каждый из электродвигателей 60 со своими монтажными опорами установлен на поворотной управляющей поверхности 50. Каждый электродвигатель поворачивается вокруг точки 33 поворота. Указанные четыре электродвигателя 60 установлены с разными линиями тяги. В частности, два из двигателей 60 имеют линию тяги, которая стремится повернуть управляющую поверхность 50 горизонтально, а другие два двигателя имеют линию тяги, которая стремится повернуть крыло 20, 22, 30, 32 вертикально. Когда все четыре двигателя 60 работают синхронно, моменты компенсируются, и в режиме вертикального полета достигается стабилизация.
[0076] Последовательность регулировки крыла, проиллюстрированная на Фиг. 3-6, показывает изменение наклона двигателей 60 и управляющей поверхности 50 при переходе между положением крыла при взлете и положением крыла при полете вперед. Как показано на этих чертежах, передние кромки 25, 35 являются неподвижными и не поворотными. Напротив, двигатели 60 и управляющие поверхности 50 поворачиваются синхронно.
[0077] Как показано на Фиг. 6, когда крыло достигает конечного горизонтального положения для полета вперед, зацепление между передними кромками 25, 35 и управляющими поверхностями 50 предотвращает дальнейший поворот крыла 20, 22, 30, 32. Это происходит потому, что крыло 20, 22, 30, 32 и управляющая поверхность 50 имеют дополняющие друг друга поверхности зацепления.
[0078] Второй вариант выполнения изобретения показан на Фиг. 7-12. В этом варианте выполнения каждый из четырех двигателей 60 установлен ниже крыльев 20, 22, 30, 32. В частности, каждый двигатель 60 шарнирно прикреплен к месту под крылом 20, 22, 30, 32, которое можно использовать для создания щели 72 передней кромки, которая дополнительно увеличивает коэффициент подъемной силы, а при снижении уменьшает аэродинамическую тряску при больших углах наклона.
[0079] Щель 72 передней кромки представляет собой зазор между передними кромками 25, 35 и поверхностью 50 управления наклоном. Щель 72 может быть видна на Фиг. 3, 4 и 5 и находится в закрытом положении на Фиг. 6. Щель 72 передней кромки можно также можно увидеть на Фиг. 11А.
[0080] Как показано на Фиг. 8, в этой конфигурации оси вращения двигателей 60 не параллельны. В частности, для каждой пары двигателей 60 ось XX вращения каждого нечетного двигателя 60 наклонена вниз относительно управляющей поверхности 50, и ось YY вращения каждого четного двигателя 60 наклонена вверх относительно управляющей поверхности 50. Таким образом, один из двигателей 60 имеют линию тяги, которая стремится повернуть управляющую поверхность 50 по часовой стрелке, а другой двигатель имеют линию тяги, которая стремится повернуть управляющую поверхность 50 против часовой стрелки. Когда все четыре двигателя 60 работают синхронно с одинаковой скоростью вращения, моменты компенсируются, и в режиме вертикального полета достигается стабилизация.
[0081] Для каждого двигателя 60 летательный аппарат 10 обеспечивает отдельно регулируемый источник питания. Это позволяет подавать на каждый двигатель различное напряжение, и, следовательно, выходной сигнал переменной мощности может выборочно генерироваться каждым двигателем 60 для достижения требуемых условий полета, таких как поворот влево и вправо.
[0082] Кроме того, независимая мощность двигателей 60 позволяет использовать двигатели 60 для наклона управляющей поверхности 50, расположенной на задних кромках крыльев 20, 22, 30, 32.
[0083] Фиг. 11A-11D на схематичных видах сбоку изображают двигатель 60, установленный на нижней стороне одного из крыльев 20, 22, 30, 32. Шарнирная пластина 28 соединена с неподвижной передней кромкой 25, 35 и проходит вниз. Двигатель 60 шарнирно соединен с шарнирной пластиной 28 в точке 33 шарнира. Воздушный винт 70 и конструкция пилона прикреплены к управляющей поверхности 50, которая поворачивается вокруг точки 33 шарнира.
[0084] Во втором варианте выполнения с двигателями 60, установленными на нижней стороне крыла, последовательность регулировки крыла, изображенная на Фиг. 11А-11D, показывает изменение наклона двигателей 60 и управляющих поверхностей 50 при переходе между положением крыла для вертикального взлета и положением крыла для горизонтального полета вперед. Таким же образом, как и в первом варианте выполнения, передние кромки 25, 35 являются неподвижными и не поворачиваются, а двигатели 60 и управляющие поверхности 50 поворачиваются синхронно.
[0085] Фиг. 12 изображает схематические виды в разрезе, иллюстрирующие переход между вертикальным и горизонтальным положениями для расположения крыла, в соответствии с любым из Фиг. 7-11D. На этом чертеже также показано расстояние между передними и задними крыльями. Фиг. 12 также показывает, что линии тяги соседних двигателей на каждом крыле не параллельны, что приводит к появлению крутящего момента вокруг точки 33 шарнира, который может быть выборочно использован для поворота управляющих поверхностей 50.
[0086] В вариантах выполнения, изображенных на Фиг. 1-17, на каждое крыло 20, 22, 30, 32 установлено два или четыре двигателя 60. Однако на летательный аппарат 10 могут быть установлены дополнительные двигатели 60, например, на крылья 20, 22, 30, 32, на носовую часть фюзеляжа 24 или на соединительные элементы 42 крыла.
[0087] В варианте выполнения, изображенном на Фиг. 15-17, на каждом крыле 20, 22, 30, 32 установлены два двигателя 60. Используя меньшее количество двигателей 60, можно увеличить диаметр ротора 70. Как показано в варианте выполнения на Фиг. 17, лопасти 70 ротора перекрываются с лопастями смежного ротора, если смотреть спереди. Чтобы обеспечить возможность перекрытия, двигатели 60 установлены так, что каждый набор лопастей ротора смещен в продольном направлении относительно смежного набора лопастей ротора (относительно оси вращения), тем самым предотвращая контакт между соседними роторами, одновременно допуская большой диаметр роторов для установки. Это показано на Фиг. 15.
[0088] В одном варианте выполнения шарнирный механизм может быть встроен в конструкцию моторного отсека, дополнительно уменьшая вес конструкции. Еще одно возможное усовершенствование заключается в том, что при наличии нескольких моторных отсеков каждый из них содержит шарнирный подшипник.
[0089] Как показано на Фиг. 10, лопасти ротора 70 двигателей 60 могут складываться вниз, когда они не используются. Кроме того, некоторые из лопастей 70 ротора могут складываться вниз и назад, когда они находятся в режиме полета вперед, поскольку в режиме полета вперед обычно требуется меньшая движительная сила, чем при взлете и посадке.
[0090] Преимущественно, летательный аппарат 10 предполагает использование распределенных шарнирных подшипников меньшего размера для каждого двигателя 60, которые могут быть избыточными, и гораздо меньшего диаметра (следовательно, легче).
[0091] Изобретение может обеспечивать переднюю кромку со щелью, что значительно уменьшает аэродинамическую тряску, испытываемую летательными аппаратами с наклонным крылом во время снижения.
[0092] Для создания дополнительной подъемной силы и/или скорости движения вперед на конструкциях, отличных от крыльев, таких как фюзеляж, могут быть установлены дополнительные электродвигатели (не показаны).
[0093] Преимущественно, рамная конструкция крыла является более аэродинамически эффективной, чем обычное крыло такого же размера, и может быть более конструктивно эффективной (следовательно, более легкой).
[0094] Преимущественно, рамная конструкция крыла обеспечивает дополнительную жесткость.
[0095] Преимущественно, летательный аппарат 10 уменьшает необходимый вес подшипников и конструкции наклона, по сравнению с традиционным летательным аппаратом с наклонным крылом. Это связано с тем, что для традиционного наклонного крыла требуется одна большая пара подшипников (по одной на каждой стороне фюзеляжа летательного аппарата) с жесткой конструкцией, которая поворачивается.
[0096] Несмотря на то, что изобретение было описано со ссылкой на конкретные примеры, специалистам в данной области будет понятно, что изобретение может быть воплощено во многих других формах.
Изобретение относится к области авиации, в частности к конструкциям летательных аппаратов вертикального взлета и посадки (ВВП). Летательный аппарат (10) ВВП содержит фюзеляж (24), первое и второе передние крылья (20, 22) и первое и второе задние крылья (30, 32). Каждое крыло (20, 22) имеет неподвижную переднюю кромку (25, 35) и заднюю управляющую поверхность (50), которая выполнена с возможностью поворота вокруг в целом горизонтальной оси. Электрические роторы (60) установлены на крыльях (20, 22, 30, 32), причем электрические роторы (60) выполнены с возможностью поворота вместе с задней управляющей поверхностью (50) между первым положением, в котором каждый ротор (60) имеет в целом вертикальную ось вращения, и вторым положением, в котором каждый ротор (60) имеет в целом горизонтальную ось вращения. При этом по меньшей мере одно из крыльев (20, 22, 30, 32) имеет первый и второй электрические роторы (60), каждый из которых установлен так, что их оси вращения не параллельны, так что линии тяги первого и второго электрических роторов отличаются. Обеспечивается снижение веса и увеличение дальности полета. 4 н. и 17 з.п. ф-лы, 20 ил.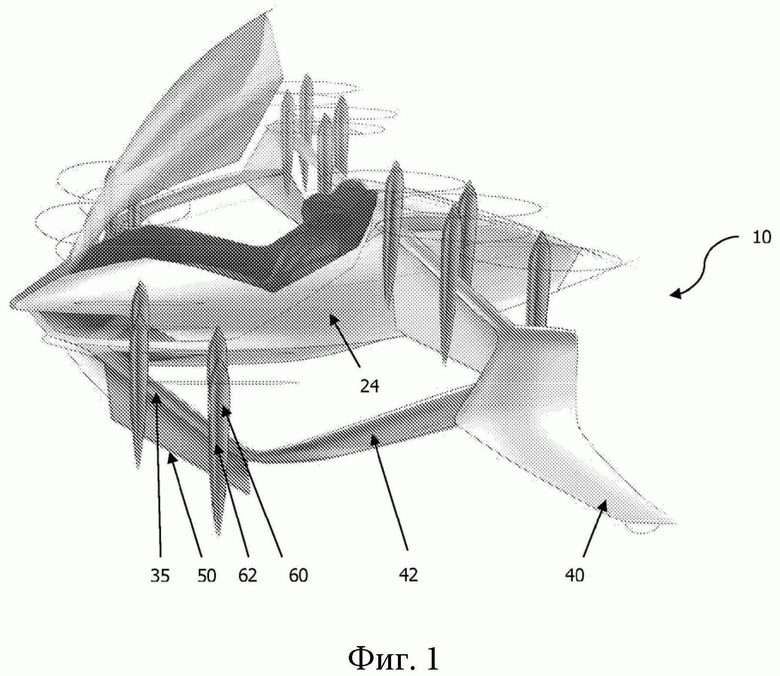
1. Летательный аппарат с вертикальными взлетом и посадкой (ВВП), содержащий:
фюзеляж,
первое и второе передние крылья, установленные на противоположных сторонах фюзеляжа,
первое и второе задние крылья, установленные на противоположных сторонах фюзеляжа,
причем каждое крыло имеет неподвижную переднюю кромку и заднюю управляющую поверхность, которая выполнена с возможностью поворота вокруг в целом горизонтальной оси,
электродвигатели, имеющие роторы, установленные на крыльях, причем роторы выполнены с возможностью поворота вместе с задней управляющей поверхностью между первым положением, в котором каждый ротор имеет в целом вертикальную ось вращения, и вторым положением, в котором каждый ротор имеет в целом горизонтальную ось вращения,
при этом по меньшей мере одно из крыльев имеет первый электродвигатель с первым ротором и второй электродвигатель со вторым ротором, каждый из которых установлен так, что их оси вращения не параллельны, так что линии тяги первого и второго роторов отличаются.
2. Летательный аппарат по п. 1, в котором линия тяги первого ротора наклонена так, что она проходит над осью шарнира, а линия тяги второго ротора наклонена так, что она проходит под осью шарнира.
3. Летательный аппарат по п. 1 или 2, в котором ось вращения первого ротора наклонена вверх относительно плоскости, проходящей через переднюю и заднюю части управляющей поверхности, а ось вращения второго ротора наклонена вниз относительно плоскости, проходящей через переднюю и заднюю части управляющей поверхности.
4. Летательный аппарат по любому из пп. 1-3, в котором, когда первый и второй роторы приводятся в действие с одинаковыми скоростями вращения, крутящие моменты, генерируемые каждым из первого и второго роторов и воздействующие на управляющую поверхность, взаимно компенсируются.
5. Летательный аппарат по любому из пп. 1-4, в котором первый и второй электродвигатели установлены на нижней стороне неподвижной передней кромки с возможностью поворота.
6. Летательный аппарат по п. 5, в котором первый и второй электродвигатели прикреплены к задней управляющей поверхности.
7. Летательный аппарат с вертикальными взлетом и посадкой (ВВП), содержащий:
фюзеляж,
первое и второе передние крылья, установленные на противоположных сторонах фюзеляжа,
первое и второе задние крылья, установленные на противоположных сторонах фюзеляжа,
причем каждое крыло имеет неподвижную переднюю кромку и заднюю управляющую поверхность, которая выполнена с возможностью поворота вокруг в целом горизонтальной оси,
электродвигатели, каждый из которых имеет роторы, установленные на крыльях, причем электродвигатели и роторы выполнены с возможностью поворота вместе с задней управляющей поверхностью между первым положением, в котором каждый ротор имеет в целом вертикальную ось вращения, и вторым положением, в котором каждый ротор имеет в целом горизонтальную ось вращения,
при этом по меньшей мере одно из крыльев имеет первый электродвигатель с первым ротором и второй электродвигатель со вторым ротором, которые смещены относительно верхней и нижней поверхностей крыла.
8. Летательный аппарат по п. 7, в котором первый ротор расположен под нижней поверхностью крыла, а второй ротор расположен над верхней поверхностью крыла.
9. Летательный аппарат по п. 7 или 8, в котором электродвигатели и роторы распределены вдоль крыла чередующимся образом в положениях под нижней поверхностью крыла и над верхней поверхностью крыла.
10. Летательный аппарат по любому из предшествующих пунктов, в котором дистальная часть каждого переднего крыла, наиболее удаленная от фюзеляжа, соединена с дистальной частью смежного заднего крыла с помощью соединительного элемента, образуя рамную конструкцию крыла.
11. Летательный аппарат по любому из предшествующих пунктов, в котором каждое переднее крыло соединено со смежным задним крылом одной или несколькими распорками или расчалками.
12. Летательный аппарат по любому из предшествующих пунктов, в котором управляющая поверхность выполнена с возможностью поворота в диапазоне между приблизительно 80 и 100 градусами.
13. Летательный аппарат по п. 12, в котором управляющая поверхность выполнена с возможностью поворота в диапазоне приблизительно 90 градусов.
14. Летательный аппарат с вертикальными взлетом и посадкой (ВВП), содержащий:
фюзеляж,
первое и второе передние крылья, установленные на противоположных сторонах фюзеляжа,
первое и второе задние крылья, установленные на противоположных сторонах фюзеляжа,
причем каждое переднее крыло соединено со смежным задним крылом с помощью дистального соединительного элемента или распорки (распорок), образуя рамную конструкцию крыла или расчаленную конструкцию крыла,
при этом каждое крыло имеет неподвижную переднюю кромку и заднюю управляющую поверхность, которая выполнена с возможностью поворота вокруг в целом горизонтальной оси,
электродвигатели с роторами, установленными на крыльях, причем электродвигатели с роторами выполнены с возможностью поворота вместе с задней управляющей поверхностью между первым положением, в котором каждый ротор имеет в целом вертикальную ось вращения, и вторым положением, в котором каждый ротор имеет в целом горизонтальную ось вращения.
15. Летательный аппарат по п. 14, в котором по меньшей мере одно из крыльев имеет первый электродвигатель с первым ротором и второй электродвигатель со вторым ротором, которые смещены относительно верхней и нижней поверхности крыла.
16. Летательный аппарат по п. 14 или 15, в котором электродвигатели и роторы распределены вдоль крыла чередующимся образом в положениях под нижней поверхностью крыла и над верхней поверхностью крыла.
17. Летательный аппарат с вертикальными взлетом и посадкой (ВВП), содержащий:
фюзеляж,
первое и второе передние крылья, установленные на противоположных сторонах фюзеляжа, при этом каждое крыло имеет неподвижную переднюю кромку и заднюю управляющую поверхность, которая выполнена с возможностью поворота вокруг в целом горизонтальной поворотной оси,
причем каждое крыло имеет первый электродвигатель с первым ротором и второй электродвигатель со вторым ротором, при этом электродвигатели и роторы расположены с возможностью поворота вместе с задней управляющей поверхностью между первым положением, в котором каждый ротор имеет в целом вертикальную ось вращения, и вторым положением, в котором каждый ротор имеет в целом горизонтальную ось вращения,
систему управления для управления каждым двигателем и ротором,
при этом система управления выполнена с возможностью выборочного приведения в действие первого электродвигателя и первого ротора и второго электродвигателя и второго ротора с разными скоростями вращения, чтобы генерировать крутящий момент для поворота управляющей поверхности вокруг поворотной оси.
18. Летательный аппарат по любому из предшествующих пунктов, в котором каждый ротор смещен в продольном направлении относительно смежного ротора, установленного на том же самом крыле, относительно оси вращения роторов.
19. Летательный аппарат по п. 18, в котором наружный диаметр каждого ротора перекрывается с наружным диаметром смежного ротора, установленного на том же самом крыле, если смотреть в плоскости, проходящей перпендикулярно оси вращения роторов.
20. Летательный аппарат по любому из предшествующих пунктов, в котором фюзеляж имеет кабину, доступ к которой осуществляется через дверь, обращенную вперед и шарнирно закрепленную в верхней области для открывания вверх.
21. Летательный аппарат по любому из пп. 1-20, в котором каждое из первого и второго задних крыльев содержит направленную вниз и назад законцовку, имеющую одно или несколько колес для поддержки летательного аппарата.
| US 20160288903 A1, 06.10.2016 | |||
| WO 2017200610 A1, 23.11.2017 | |||
| US 3181810 A1, 04.05.1965 | |||
| US 20110042509 A1, 24.02.2011 | |||
| ЭКОЛОГИЧНЫЙ ГИБРИДНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ С ХРАНИЛИЩЕМ ДЛЯ ИСПОЛЬЗУЕМОГО В НЕМ ГЕЛИЯ | 1993 |
|
RU2097272C1 |
| ГИБРИДНЫЙ САМОЛЕТ КОРОТКОГО ВЗЛЕТА И ПОСАДКИ | 2015 |
|
RU2577931C1 |

