Изобретение относится к области авиационной техники и касается создания беспилотных кольцесинхрокоптеров корабельного базирования с ярусным расположением перекрещивающихся винтов в поперечно-продольной схеме Х2×2 и противоположным вращением двухлопастных винтов как в верхней, так и в нижней их парах, установленных на удлиненных валах, приводимых от биротативного электропривода, смонтированного в середине кольцевого крыла, наклоненных от вертикали как влево и вправо, так и вперед и назад соответственно как от, так и вдоль плоскости симметрии и обеспечивающих полет при вертикальном и горизонтальном положении фюзеляжа соответственно для взлетно-посадочной и крейсерской конфигурации полета.
Известен проект самолета вертикального взлета и посадки (СВВП), выполненный по схеме "бесхвостка" под руководством академика Б.Н. Юрьева и И.П. Братухина, содержит короткий фюзеляж с взаимно перпендикулярными четырьмя консолями крестообразного крыла малого удлинения, на концах которых смонтированы четыре турбовинтовых двигателя (ТВД) в гондолах с тянущими соосными винтами, обеспечивающими выполнение вертикального взлета/посадки (ВВП) при вертикальном расположении его фюзеляжа на четырехопорном шасси неубирающимся с амортизационными стойками, смонтированными в обтекателях на концах консолей крыла.
Признаки, совпадающие - наличие фюзеляжа прямоугольного сечения с крестообразным крылом и силовой установкой (СУ), состоящей из четырех ТВД модели НК-12МВ мощностью по 12000 лс, которые использовались на бомбардировщике Ту-95 с тянущими соосными винтами диаметром 6 м, смонтированными на концах крыла и обеспечивающими выполнение ВВП только при соответствующем вертикальном расположении его фюзеляжа. Соосные винты имеют синхронизирующее и взаимно противоположное их вращение. Расчетная взлетная масса СВВП составляла 50…60 тонн в зависимости от условий полета, а максимальная взлетная тяга четырех соосных винтов - 90 тонн. Вертикально взлетающий самолет совершал вертикальный взлет, имея достаточную для набора высоты тяговооруженность (не менее 1,2-1,5), а затем должен был перейти к горизонтальному полету. В его носовой части находилась двухместная кабина экипажа. Кресла устанавливались на шарнирах с фиксацией, чтобы обеспечить комфортность экипажу при изменении положения фюзеляжа в процессе взлета и посадки. Проект 1954 года отличался оригинальностью компоновки и важнейшей особенностью этой разработки стала электрическая схема трансмиссии, заменившая традиционную механическую - с редукторами, валами и муфтами.
Причины, препятствующие поставленной задаче: первая - это то, что СВВП с движителем в виде четырех несущих соосных винтов, смонтированных в гондолах на концах прямых консолей крестообразного крыла и используемых как при выполнении ВВП, так и в горизонтальном полете, когда после набора большой вертикальной высоты до 1000 м летчик вводил его в пикирование и, набрав большую скорость из-за недостаточной несущей способности крыла, выходил на горизонтальный скоростной полет, что предопределяет значительный расход топлива при переходных режимах полета. Вторая - это то, что СВВП, имеющий четырехопорное шасси неубирающееся с амортизационными стойками, смонтированными в обтекателях на концах консолей прямого крыла, предопределяет только его вертикальный взлет при вертикальном расположении его фюзеляжа, что снижает безопасность в случае отказа одного или двух ТВД и возможности выполнить посадку "по-самолетному". Третья - это то, что в СВВП при вертикальном и горизонтальном его полете используются одни и те же его рулевые поверхности - рули направления и элевоны, находящиеся в воздушном потоке соосных винтов, неизменными из которых по своей сути остаются только элевоны для управления по тангажу, которые являются наиболее важными при переходе, что предопределяет необходимость при висении осуществлять перекладку данных рулей с управления по крену на рысканье, являющейся сложной задачей, не обеспечивающей стабильности управляемости по курсу. Все это ограничивает возможность дальнейшего упрощения управляемости по курсу при переходных режимах полета, повышения дальности полета, показателей транспортной и топливной эффективности.
Известен беспилотный самолет модели "Sky Tote" вертикального взлета и посадки компании "Aero Vironment (США, 2006), выполненный по схеме моноплана с трапециевидным крылом, содержит фюзеляж, оснащенный в носовой его части силовой установкой, включающей поршневой двигатель с соосными тянущими двухлопастными винтами, создающими по оси симметрии взлетную тягу, снабжен четырехопорным шасси неубирающимся с амортизационными стойками, смонтированными в обтекателях на концах килей хвостового Х-образного оперения.
Признаки, совпадающие - наличие схемы моноплана с трапециевидным крылом без закрылок и Х-образным оперением, взаимно перпендикулярные кили которого отклонены наружу от плоскости симметрии под углом 45°. Среднерасположенное крыло площадью Sкр=1,33 м2 имело удлинение λ=5,32 с углом стреловидности по передней кромке χ=10° и удельную нагрузку на крыло 94,0 кг/м2. В носовой части фюзеляжа перед крылом были расположен поршневой двигатель (ПД) с двухлопастными винтами и взлетной мощностью 60 л.с. Соосные винты, имеющие взаимно противоположное вращение, расположены в передней части фюзеляжа и обеспечивают взлетную и маршевую тягу при выполнении ВВП с вертикальным и горизонтальным расположением его фюзеляжа соответственно. Использование соосных тянущих винтов позволяло избежать разворачивающего момента, который особенно трудно компенсировать при выполнении ВВП, но и устранить влияние гироскопического эффекта вращающихся масс винтов диаметром 1,12 м. Расчетная взлетная масса "Sky Tote" с таким ПД и винтами может составлять 125 кг при взлетной тяге двух соосных винтов -154 кгс, имеющих на 20-25% большую тягу в сравнении с одним открытым винтом. Первый вертикальный взлет он совершил в 2006 г. при соответствующем положении его фюзеляжа, имел для набора высоты тяговооруженность (1,23) и возможность перехода к горизонтальному полету с использованием специального нейросетевого контроллера. Для возможности его запуска из плавающего контейнера типа "Sea Robin", выпущенного с подводного положения подводной лодки при помощи стандартного 533-мм торпедного аппарата, эта концепция "Sky Tote", например, с ПД мощностью 24 л.с. (создающим повышенную акустическую сигнатуру) и соосными винтами диаметром 0,44 м будет иметь взлетный вес 37 кг при взлетной тяге двух соосных винтов - 46 кгс и может обеспечить полезную нагрузку 5 кг и массу топлива 12 кг для времени крейсерского горизонтального его полета до 6 часов при времени зависания 0,5 ч.
Причины, препятствующие поставленной задаче: первая - это то, что "Sky Tote", имеющий четырехопорное шасси неубирающееся с амортизационными стойками, смонтированными в обтекателях на концах килей Х-образного оперения, предопределяет только его вертикальный взлет при вертикальном расположении его фюзеляжа и исключает возможность выполнить посадку "по-самолетному", что снижает безопасность. Вторая - это то, что диаметры соосных винтов при горизонтальном расположении фюзеляжа в самолетной конфигурации и на взлетно-посадочных его режимах "по-самолетному" потребуют оснащения трапециевидного крыла закрылками и значительную высоту стоек убирающегося шасси и как, следствие, это увеличивает массу планера и ухудшает весовую отдачу, а однодвигательная СУ, снижая надежность вертикального взлета при его отказе, ухудшает безопасность. Третья - это то, что трапециевидное в плане крыло без дополнительного непосредственного управления подъемной силой не обеспечивают способности повышения аэродинамической эффективности во всех областях летных режимов и, особенно, уменьшения как дистанции, так и скорости взлета-посадки, а средства аэродинамической балансировки при помощи рулевых поверхностей килей Х-образного оперения предопределяют сложную систему отклонения рулей с триммерами, что ухудшает продольную балансировку на переходных режимах полета и не обеспечивает достаточную стабильность управления и особенно на углах атаки от 20° до 25°. Четвертая - это то, что соосные трехлопастные винты с взаимно противоположным вращением, смонтированные в носовой части фюзеляжа и имеющие минимальный разнос между его винтами, что создает при вертикальном взлете и посадке неблагоприятное взаимное влияние (индуктивные потери) и вредную обдувку нижнего несущего винта верхним, усложняет схему редуцирования, а также значительно увеличивает массу редуктора и его высоту, что ограничивает возможности базирования и транспортирования. Пятая - это то, что фюзеляж "Sky Tote" имеет его длину почти равную размаху складывающегося крыла и, следовательно, для обеспечения продольно-поперечной стабильности предопределяет значительное увеличение размаха его Х-образного оперения, что ограничивает возможность его запуска из плавающего контейнера "Sea Robin", выпущенного с подводного положения подводной лодки при помощи стандартного 533-мм торпедного аппарата. Все это ограничивает улучшение продольно-поперечной управляемости при выполнении ВВП и зависании, а также увеличение полезной нагрузки весовой отдачи, но и показателей транспортной и топливной эффективности.
Наиболее близким к предлагаемому изобретению является колеоптер "Convair Model 49" компании «Convair» (США), имеющий снаружи круглого крыла четыре гондолы, на концах трех из них имеются двигатели, приводящие посредством трансмиссии соосные с размещением на конце внутреннего фюзеляжа трехлопастные винты, создающие по оси симметрии взлетную и маршевую тягу соответственно для выполнения вертикального взлета/посадки (ВВП) и горизонтального крейсерского полета, снабжен четырехопорным шасси неубирающимся с амортизационными стойками, смонтированными на концах четырех гондол.
Признаки, совпадающие - наличие схемы моноплана с круглым крылом без закрылок, имеющий наружный диаметр 7 м при хорде крыла 4,77 м, удлинение λ=1,46 и удельную нагрузку на крыло 215,6 кг/м2. Круглое крыло, выполненное в виде кольцевого канала, снабжено на его выходе рулями направления, а также высоты и крена. В передней части трех пилонов были расположены соответствующие воздухозаборники для трех газотурбинных двигателей (ГТД) модели Lycoming LTC4B-11 мощностью по 2200 л.с. каждый. Соосные винты, имеющие взаимно противоположное вращение, расположены в задней части короткого фюзеляжа и обеспечивают взлетную и маршевую тягу при выполнении ВВП с вертикальным и горизонтальным расположением его фюзеляжа соответственно. Использование соосных винтов позволяло избежать разворачивающего момента, который особенно трудно компенсировать при выполнении ВВП, а также устранить влияние гироскопического эффекта вращающихся масс винтов диаметром 4,88 м. Расчетная взлетная масса составляла 7200 кг в зависимости от условий полета, а максимальная взлетная тяга двух соосных винтов - 9000 кгс, имеющих на 27-32% большую тягу в сравнении с одним открытым винтом. Вертикальный взлет колеоптера при соответствующем положении его кольцевого канала, имел достаточную для набора высоты тяговооруженность (до 1,25), возможность перехода к горизонтальному полету и достижения скорости до 560 км/ч. В его носовой части находилась двухместная кабина, которая устанавливалась на шарнирах и могла отклоняться к фронтальной его части на угол 90° с фиксацией, чтобы обеспечить комфортность пилотам и возможность управления при вертикальном положении круглого крыла в процессе выполнения зависания или технологии ВВП. Для возможности его запуска из плавающего контейнера типа "Sea Robin", выпущенного с подводного положения подводной лодки при помощи стандартного 533-мм торпедного аппарата, эта концепция  например, с ПД мощностью 24 л.с. (создающим повышенную акустическую сигнатуру) и соосными винтами диаметром 0,44 м будет иметь взлетный вес 39 кг при взлетной тяге двух соосных винтов - 49 кгс и может обеспечить полезную нагрузку 6 кг и массу топлива 12 кг для времени крейсерского горизонтального его полета до 6 часов при времени зависания 0,5 ч.
например, с ПД мощностью 24 л.с. (создающим повышенную акустическую сигнатуру) и соосными винтами диаметром 0,44 м будет иметь взлетный вес 39 кг при взлетной тяге двух соосных винтов - 49 кгс и может обеспечить полезную нагрузку 6 кг и массу топлива 12 кг для времени крейсерского горизонтального его полета до 6 часов при времени зависания 0,5 ч.
Причины, препятствующие поставленной задаче: первая - это то, что колеоптер, имеющий четырехопорное шасси неубирающееся с амортизационными стойками, смонтированными в обтекателях на концах пилонов, предопределяет только его вертикальный взлет при вертикальном расположении его фюзеляжа и исключает возможность выполнить посадку "по-самолетному", что снижает безопасность. Вторая - это то, что диаметры соосных винтов при горизонтальном расположении фюзеляжа в самолетной конфигурации и на взлетно-посадочных его режимах "по-самолетному" потребуют оснащения круглого крыла закрылками и значительную высоту стоек убирающегося шасси и как, следствие, это увеличивает массу планера и ухудшает весовую отдачу. Третья - это то, что круглое крыло без дополнительного непосредственного управления подъемной силой не обеспечивают способности повышения аэродинамической эффективности во всех областях летных режимов и, особенно, достижения при крейсерском полете аэродинамического качества Ка>6, а средства аэродинамической балансировки при помощи рулевых поверхностей на выходе кольцевого канала предопределяют сложную систему отклонения рулей с триммерами, что ухудшает продольную поперечную балансировки на переходных режимах полета и не обеспечивает достаточную стабильность управления и, особенно, на углах атаки от 40° до 50°. Четвертая - это то, что соосные трехлопастные винты с взаимно противоположным вращением, смонтированные в задней части короткого фюзеляжа и имеющие минимальный разнос между его винтами, что создает при вертикальном взлете и посадке неблагоприятное взаимное влияние (индуктивные потери) и вредную обдувку нижнего несущего винта верхним, усложняет схему редуцирования, а также значительно увеличивает массу редуктора и его высоту, что ограничивает возможности базирования и транспортирования. Все это ограничивает улучшение продольно-поперечной управляемости и стабильности управления, увеличение полезной нагрузки и весовой отдачи, а также показателей транспортной и топливной эффективности.
Предлагаемым изобретением решается задача в указанном выше известном колеоптере "Convair Model 49" упрощения конструкции и исключения внутреннего фюзеляжа, увеличения полезной нагрузки, повышения взлетного веса и увеличения весовой отдачи, уменьшения потребной мощности на путевую балансировку при висении и улучшения поперечной и продольной управляемости, повышения высоты и дальности полета, а также показателей транспортной и топливной эффективности.
Отличительными признаками предлагаемого изобретения от указанного выше известного колеоптера "Convair Model 49", наиболее близкого к нему, являются наличие того, что он выполнен по аэродинамической схеме "бесхвостка" с упомянутым кольцевым корпусом-крылом, снабженным с взаимно перпендикулярными четырьмя стреловидными консолями крестообразного внешнего крыла, смонтированного, не выходя за заднюю кромку корпуса-крыла, на концах упомянутых разновеликих гондол, и концепции ярусного расположения перекрещивающихся винтов (ЯРПВ) в схеме ЯРПВ-Х2×2 с противоположным в ней вращением винтов как в верхней поперечной, так и в нижней продольной их парах, установленных на удлиненных V-образных выходных валах, образуя как бы V-образные редукторы, наклоненных на углы 15° от вертикали соответственно как от, так и вдоль плоскости симметрии по оси Х-Х при вертикальном положении корпуса-крыла, имеющего в его центре масс главный редуктор, смонтированный внутри корпуса-крыла на профилированных ребрах жесткости и стреловидных секциях внутреннего крыла, имеющего угол стреловидности по передней кромке равный χ=15° и размещенного в плоскости горизонтальных стреловидных консолей внешнего крыла, оснащенных элевонами и на законцовках парой телевизионных камер заднего видового обзора, при этом вертикальные стреловидные консоли внешнего крыла, снабженные рулями направления, смонтированы на соответствующих более длинных гондолах, выполненных в виде удобообтекаемых продольных пилонов, вынесенных за переднюю кромку корпуса-крыла, имеющую с углом стреловидности χ=15° плавно сопряженную конфигурацию с разновеликими гондолами, и оснащенных спереди оптическими гиростабилизированными фотовидеосистемами с обзорностью 270 градусов, нижняя из которых работает в инфракрасном диапазоне, а две менее длинные мотогондолы, вынесенные за переднюю кромку корпуса-крыла, снабжены в передней их частях соответствующими воздухозаборниками двух двигателей, причем вертикальное положение корпуса-крыла с ярусной поперечно-продольной несущей схемой, выполненной с двухлопастными винтами, имеющими как жесткое крепление лопастей и без изменения циклического их шага, так и возможность изменения общего их шага и установки их лопастей во флюгерное положение после их остановки и фиксации, предопределяет то, что оси вращения винтов, отклоненные от вертикальной оси соответствующего V-образного редуктора размещены таким образом, что лопасти поперечной группы винтов размещены по оси Z-Z и параллельно оси Х-Х, а лопасти продольной группы винтов в свою очередь размещены по оси Х-Х и параллельно оси Z-Z, при этом между равновеликими винтами, имеющими от всех несущих винтов компенсацию реактивных крутящих их моментов при противоположном направлении их вращения и в поперечной, и продольной группе винтов, но и одинакового их вращения между отдельными винтами поперечной и продольной их групп при вертикальном положении корпуса-крыла и виде сверху как по часовой стрелке, так и против, например, между винтами, размещенными как по осям Z-Z и Х-Х, так и параллельно этим осям соответственно, что обеспечивает создание более плавного обтекания воздушным потоком от соответствующих винтов внутренней поверхности кольцевого корпуса-крыла и стреловидного внутреннего крыла, причем с целью обеспечения возможности выполнения короткого взлета и посадки (КВП) при горизонтальном расположении корпуса-крыла он снабжен, выполненным по велосипедной схеме четырехопорным колесным шасси, использующим наряду с двумя вспомогательными колесами, смонтированными на концах левой и правой мотогондол, выполненных с удлиненными стойками, убирающимися в соответствующие задние ниши мотогондол, оснащен носовой и кормовой дополнительными основными его опорами с неубирающимися амортизационными колесами, смонтированными в соответствующих частях нижнего продольного пилона, оснащенного складывающейся нижней консолью внешнего крыла, обеспечивающей свободное вращение кормового колеса по поверхности при осуществлении взлетно-посадочных режимов, при этом он снабжен возможностью преобразования его полетной конфигурации с вертолета четырехвинтовой поперечно-продольной несущей схемы при вертикальном расположении его корпуса-крыла в полетную конфигурацию при горизонтальном расположении корпуса-крыла двухвинтового кольцеплана, имеющего отключенные от трансмиссии поперечные винты, лопасти которых установлены во флюгерное положение и зафиксированы с отклонением влево и вправо от плоскости симметрии соответственно параллельно передней кромке корпуса-крыла и плоскости симметрии, оснащен движительной продольной системой с двумя задними по полету винтами, размещенными вдоль плоскости симметрии и представляющими собой как бы перекрещивающиеся толкающие импеллеры, создающие маршевую тягу для скоростного крейсерского полета с обеспечением как третьей большей, так и второй средней или первой меньшей скорости соответственно после как вертикального, так и короткого взлета в перегрузочном его варианте на 7% или 15% больше от нормального взлетного веса при работающем одном двигателе, выдающем соответственно как 70%, так и 75% или 80% от взлетной его мощности, которая в свою очередь поровну перераспределяется через главный редуктор на задние толкающие импеллеры, но и обратно, причем система трансмиссии, включающая главный редуктор, имеющий при горизонтальном расположении корпуса-крыла и фронтальном виде как бы крестообразную его конфигурацию и обеспечивающий передачу взлетной мощности, например, от газотурбинных двигателей (ГТД), расположенных в передней части соответствующих мотогондол и имеющих задний вывод вала для отбора взлетной их мощности и ее передачи посредством левого и правого Г-образных угловых редукторов и соответствующих синхронизирующих валов, проложенных в носке внутреннего крыла, к входным валам главного редуктора, выходные передний и задний валы которого связаны посредством электромагнитных синхронизирующих муфт сцепления с соответствующими синхронизирующими V-образными редукторами, смонтированными совместно с главным редуктором в общем обтекателе, выполняющим как бы роль центрального тела кольцеплана, и имеющими выходные V-образные выла в обтекателях с соответствующими перекрещивающимися винтами, при этом каждый из ГТД, образуя синхронизирующую систему, снабжен муфтой свободного хода, выдающей, отключая от топливной системы и трансмиссии в горизонтальном скоростном полете любой избыточный ГТД и один любой в случае его отказа или оба ГТД при их совместном отказе, управляющий сигнал на автоматическое как изменение полетной конфигурации в кольцеплан с горизонтальным положением корпуса-крыла, так и выполнение отклонения элевонов и рулей направления на консолях внешнего крыла на соответствующие углы, изменяющиеся соответственно от скорости и высоты полета для поддержания корпуса-крыла в строго горизонтальном его положении при аварийной посадке с зафиксированными винтами во флюгерном их положении, а для повышения безопасности верхний продольный пилон, имеющий в верхней автоматически раскрываемой части контейнер с вытяжным и основным парашютами, стропы последнего закреплены на боковой части корпуса-крыла над центром масс, что обеспечивает, защищая от ударной нагрузки совместно с энергопоглощающими стойками соответствующего выпущенного колесного шасси, допустимое уменьшение скорости снижения до 7 м/с, что смягчает приземление при аварийной посадке на парашютной спасательной системе со всеми винтами, установленными во флюгерное положение и зафиксированными тормозами винтов.
Кроме того, с целью исключения главного редуктора с валами трансмиссии его электрическая силовая установка (ЭСУ), выполненная по параллельно-последовательной гибридной технологии силового привода двойного вращения, смонтированная в обтекателе центрального тела, снабжена биротативным электродвигателем (БЭД), обеспечивающим вращение и статора, и ротора в противоположные стороны, выходные валы которых, направленные также в противоположные стороны, соединены с нагрузкой для передачи крутящего момента и вращательно связаны с упомянутыми V-образными редукторами винтов, но и оснащена как вспомогательно-зарядной ЭСУ, включающей обратимый электромотор-генератор (ОЭМГ) с валом ротора, выходящим в противоположные стороны для передачи крутящего момента и вращательно связанным соосно с выходным и входным валами соответственно БЭД, вращаемого от его статора, и упомянутой электромагнитной синхронизирующей муфты сцепления V-образного редуктора поперечных винтов, так и системой управления электропривода, включающей все аккумуляторные быстро перезаряжаемые батареи и водородно-воздушные топливные элементы, преобразователь энергии с блоком управления силовой передачи, подключающим и отключающим БЭД и ОЭМГ, а также переключающим дополнительную как электрическую, так и генерирующую мощность ОЭМГ соответственно при его работе как в режиме электромотора и при передаче пиковой мощности совместно с БЭД на V-образный редуктор соответствующих поперечных винтов для выполнения ВВП или зависания в перегрузочном варианте и при этом с его питанием от аккумуляторов и топливных элементов совместно с БЭД, так и в режиме электрогенератора для подзарядки аккумуляторов от ОЭМГ, который после выполнения ВВП и переходного маневра при горизонтальном положении корпуса-крыла, но и отключения передних винтов по полету от трансмиссии и при полетной конфигурации двухвинтового кольцеплана обеспечивает способ генерации электрической номинальной мощности только от внутреннего источника энергии -выходной вал, вращаемый от статора БЭД, получающий электроэнергию при этом только от топливных элементов и одновременно передающий крутящий момент с выходного вала, вращаемого от ротора БЭД, на входной вал V-образного редуктора соответствующих продольных винтов, при этом левая и правая мотогондолы, выполненные в виде соответствующих быстро съемных обтекателей, имеющих специальные внутренние каркасы для совместно смонтированных аккумуляторных батарей и топливных элементов, установленных соответственно от переднего и заднего конца до середины каждого обтекателя и подключенных посредством коммутационных специальных делителей мощности к БЭД и ОЭМГ таким образом, что все аккумуляторы и топливные элементы соединены между собой последовательно размещены соответственно в передних и задних частях левого и правого каркасов таким образом, что соответственно положительные и отрицательные клеммы их полюсов соединены между собой посредством переднего и заднего контакторов, а отрицательные и положительные клеммы их полюсов соединены в средней части левого и правого каркаса совместно с делителем мощности через соответствующие переключатели режимов, левый и правый из которых включены между соответствующими минусами и плюсами клемм и которые подключают напряжение или совместно от аккумуляторов и топливных элементов и к БЭД, и ОЭМГ или только по отдельности к ОЭМГ и БЭД соответственно от аккумуляторов и топливных элементов, причем между плюсами и минусами клемм левого и правого каркасов как, топливных элементов, так и аккумуляторов на фронтальном виде включены как задний, так и передний контакторы, которые автоматически подключают и отключают напряжение как на БЭД в момент его запуска с катапульты или отстрела его в специальном контейнере с торпедного аппарата с замедлением до двух секунд и подает напряжение на БЭД при переключении его питания с топливных элементов на аккумуляторы соответственно, так и на ОЭМГ в момент выполнения ВВП или зависания в перегрузочном варианте и переключении его в режим работы электромотора соответственно, но и подключает и отключает вырабатываемое напряжение от ОЭМГ в режиме его работы как электрогенератора и подачу на аккумуляторы после срабатывания емкостного датчика соответственно при достижении (25% емкости аккумуляторов) полной их зарядке и при одновременном (подключении) отключении вращения ОЭМГ от выходного вала БЭД, вращаемого от его статора, при этом с целью возможности его использования в двух средах: в воздухе и на/под воде/водой он выполнен с полностью электрической его герметизированной ЭСУ, но и отстрела в специальном контейнере со стандартного 533-мм торпедного аппарата он оснащен автоматически складываемыми/раскладываемыми левой, правой и верхней консолями внешнего крыла как у упомянутой нижней консоли с обеспечением их размещения как бы в описываемом круге диаметром соответствующему внутреннему диаметру специального контейнера, представляющий собой как бы плавающий «бакен», находящийся в плавучем состоянии или «спящем» (по необходимости) режиме на морской поверхности так, чтобы верхняя часть, имеющая 1/3 длины от общей его длины с автоматически открываемым верхним люком, размещалась в надводном положении, а нижняя более тяжелая часть была соответственно в подводном состоянии и с автоматической катапультой, срабатываемой или по программе от бортового контроллера только после открытия верхнего люка, или по радиоканалу закрытой связи при прямой радиовидимости, или по спутниковому каналу в зоне его действия для автоматического режима без участия оператора как взлета, облета маршрута по заданным точкам, так и автоматическое изменение маршрута (по необходимости), но и режим возвращения «домой» к плавающему контейнеру и вертикальную посадку во внутрь последнего, обеспечиваемую в автоматическом режиме таким образом, что верхний полусферический люк, выполненный с четырьмя раскрываемыми секторами, образующими при их отклонении на угол 45° наружу как бы внешние направляющие для вертикальной посадки, каждая из которых срабатывает отклонение во внутрь для достижения автоматической соосности контейнера и корпуса-крыла, имеющего в нижней части в продолжении внешних бортов обтекателей выдвижной конус, выполненный в виде трубчатого корпуса как бы четырехспицевого зонта, но и осуществления его опускания во внутрь последнего, а также герметичного закрывания полусферического люка для подготовки транспортирования контейнера с ним или подводным способом специальным подводным роботом с захватом для перемещения его в отсек подводной лодки или надводным способом специальным корабельным манипулятором с захватом для перемещения его на палубу корабля.
Кроме того, с целью улучшения аэродинамических характеристик и уменьшения при скоростном горизонтальном полете лобового сопротивления профиля каждого несущего винта, связанное с уменьшением хорды на конце каждой его лопасти, имеющей саблевидную форму в плане с заостренной по направлению к ее концу каждой оживальной законцовки оптимизированной для горизонтального полета на большой скорости, представляющей собой эффективное средство для уменьшения неблагоприятных последствий сжимаемости воздуха, в частности, появления скачков уплотнения при увеличении хорды за пределами некоторого поперечного сечения, располагающегося примерно в расширяющейся зоне на участке от 5/12 до 5/6 полного радиуса каждой лопасти R и смещенной в направлении вперед таким образом, чтобы уравновесить определенное смещение назад ее оживальной законцовки, имеющей на ее конце переднюю кромку с углом стреловидности, составляющим χ=44° и способствующим появлению интенсивных и устойчивых вихрей, которые отодвигают границу срыва потока, особенно, в том случае, когда данная лопасть движется в направлении, противоположном направлению поступательного полета при зависании, при этом с целью возможности как отодвинуть границы срыва потока, так и обеспечить выигрыш в мощности на больших скоростях горизонтального полета каждая лопасть в некоторой зоне на ее конце, располагающейся на участке между от 5/6 R до полного радиуса каждой лопасти R, т.е. размаха данной лопасти с учетом заостренной ее оживальной законцовки имеет увеличенную степень некоторой линейной аэродинамической крутки с некоторой полной амплитудой, величина которой заключена в диапазоне от -7° до -12°, между центром каждого несущего винта и свободной оживальной законцовкой каждой лопасти, причем с целью возможности уменьшить нежелательные эффекты, связанные со сжимаемостью воздуха, относительная толщина профиля каждой лопасти поддерживается на уровне от 14 до 12% на той части лопасти, где хорда имеет относительно небольшую длину, т.е. до элементарного поперечного сечения, располагающегося на уровне примерно от корневой ее части до 5/12 полного размаха каждой лопасти, имеющей на полном ее размахе профили между элементарным поперечным сечением, располагающимся в зоне на участке от 5/12 полного размаха каждой лопасти до конца каждой лопасти, относительная толщина которой уменьшается как бы линейным образом, образующим двукратное ее относительное утончение до уровня от 7 до 6%, в частности, на заостренном участке между началом и концом оживальной законцовки каждой лопасти, образуя в радиальном направлении вдоль всей протяженности полного размаха как бы усеченную ее клиновидность.
Кроме того, с целью улучшения появления интенсивных вихрей, отодвигающих границу срыва потока каждая упомянутая лопасть вдоль всей протяженности ее полного размаха R разделена на ряд четных разновеликих зон как на ее верхней, так и нижней поверхностях, выполненных от ее начала соответственно как от первой все нечетные, так и от второй все четные зоны с наклеенными, отступая 7 мм от центра давления лопасти к ее передней кромке, из термопластичного полиуретана полосками, имеющими удвоенную длину от их ширины равной b=5/9 аэродинамической хорде лопасти соответствующей зоны с утонченностями передней и задней ее кромки, выполненной пилообразной,но йот толщины 0,5 мм к утонченностям каждой из трехгранных боковых сторон, выполненных как бы по радиусам соответствующей зоны, каждая из которых, начиная от конца лопасти ее четная нижняя наклейка с последующей нечетной верхней наклейкой образуют как бы синусоидальную конфигурацию вдоль полного ее размаха R.
Кроме того, с целью возможного его использования в двух средах как в воздухе, так и под водой каждая упомянутая лопасть, выполненная, например, из композиционных материалов с одновременным формованием упомянутых синусоидальных конфигураций таким образом, чтобы образованные упомянутые утонченности вдоль протяженности полного ее размаха R имели боковые стороны, выполненные по радиусу соответствующей зоны.
Благодаря наличию этих признаков, позволяющих выполнить беспилотный кольцесинхрокоптер (БКСК) корабельного базирования, взлетающий при выполнении ВВП и КВП и имеющий систему ярусного расположения перекрещивающихся винтов (ЯРПВ) в движительно-несущей схеме ЯРПВ-Х2×2 с противоположным в ней вращением винтов как в верхней поперечной, так и в нижней продольной их парах, установленных на удлиненных V-образных выходных валах, образуя как бы V-образные редукторы, наклоненных на углы 15° от вертикали соответственно как от, так и вдоль плоскости симметрии по оси Х-Х при вертикальном положении корпуса-крыла, имеющего в его центре масс главный редуктор, смонтированный внутри корпуса-крыла на профилированных ребрах жесткости и стреловидных секциях внутреннего крыла, имеющего угол стреловидности по передней кромке равный χ=15° и размещенного в плоскости горизонтальных стреловидных консолей внешнего крыла, оснащенных элевонами. Вертикальные стреловидные консоли внешнего крыла, снабженные рулями направления, смонтированы на соответствующих более длинных гондолах, выполненных в виде удобообтекаемых продольных пилонов, вынесенных за переднюю кромку корпуса-крыла, имеющую с углом стреловидности χ=15° плавно сопряженную конфигурацию с округленной вершиной, и оснащенных спереди оптическими гиростабилизированными фотовидеосистемами с обзорностью 270 градусов, нижняя из которых работает в инфракрасном диапазоне, а две менее длинные мотогондолы, вынесенные за переднюю кромку корпуса-крыла, снабжены в передней их частях соответствующими воздухозаборниками двух двигателей. Между равновеликими двухлопастными винтами, имеющими от всех несущих винтов компенсацию реактивных крутящих их моментов при противоположном направлении их вращения и в поперечной, и продольной группе винтов, но и одинакового их вращения между отдельными винтами поперечной и продольной их групп при вертикальном положении корпуса-крыла и виде сверху как по часовой стрелке, так и против, например, между винтами, размещенными как по осям Z-Z и Х-Х, так и параллельно этим осям соответственно, что обеспечивает создание более плавного обтекания воздушным потоком от соответствующих винтов внутренней поверхности кольцевого корпуса-крыла и стреловидного внутреннего крыла. БКСК снабжен возможностью преобразования его полетной конфигурации с вертолета четырехвинтовой поперечно-продольной несущей схемы при вертикальном расположении его корпуса-крыла в полетную конфигурацию при горизонтальном расположении корпуса-крыла двухвинтового кольцеплана, имеющего отключенные от трансмиссии поперечные винты, лопасти которых установлены во флюгерное положение и зафиксированы с отклонением влево и вправо от плоскости симметрии соответственно параллельно передней кромке корпуса-крыла и плоскости симметрии, оснащен движительной продольной системой с двумя задними по полету винтами, размещенными вдоль плоскости симметрии и представляющими собой как бы перекрещивающиеся толкающие импеллеры, создающие маршевую тягу для скоростного крейсерского полета с обеспечением как третьей большей, так и второй средней или первой меньшей скорости соответственно после как вертикального, так и короткого взлета в перегрузочном его варианте на 7% или 15% больше от нормального взлетного веса при работающем одном двигателе, выдающем соответственно как 70%, так и 75% или 80% от взлетной его мощности, которая в свою очередь поровну перераспределяется через главный редуктор на задние толкающие импеллеры, но и обратно. Система трансмиссии, включающая главный редуктор, имеющий при горизонтальном расположении корпуса-крыла и фронтальном виде как бы крестообразную его конфигурацию и обеспечивающий передачу взлетной мощности, например, от газотурбинных или турбодизельных двигателей (ГТД или ТДД), расположенных в передней части соответствующих мотогондол и имеющих задний вывод вала для отбора взлетной их мощности и ее передачи посредством левого и правого Г-образных угловых редукторов и соответствующих синхронизирующих валов, проложенных в носке внутреннего крыла, к входным валам главного редуктора, выходные передний и задний валы которого связаны посредством электромагнитных синхронизирующих муфт сцепления с соответствующими промежуточными редукторами, смонтированными совместно с главным редуктором в общем обтекателе, выполняющим как бы роль центрального тела кольцеплана, и имеющими выходные V-образные выла в обтекателях с соответствующими перекрещивающимися винтами. При этом каждый из ГТД, образуя синхронизирующую систему, снабжен муфтой свободного хода, выдающей, отключая от топливной системы и трансмиссии в горизонтальном скоростном полете любой избыточный ГТД и один любой в случае его отказа или оба ГТД при их совместном отказе, управляющий сигнал на автоматическое как изменение полетной конфигурации в кольцеплан с горизонтальным положением корпуса-крыла, так и выполнение отклонения элевонов и рулей направления на консолях внешнего крыла на соответствующие углы, изменяющиеся соответственно от скорости и высоты полета для поддержания корпуса-крыла в строго горизонтальном его положении при аварийной посадке с зафиксированными винтами во флюгерном их положении.
Кроме того, гибридная ЭСУ, выполненная по параллельно-последовательной технологии силового привода двойного вращения, смонтированная в обтекателе центрального тела, снабжена БЭД, обеспечивающим вращение и статора, и ротора в противоположные стороны, выходные валы которых, направленные также в противоположные стороны, соединены с нагрузкой для передачи крутящего момента и вращательно связаны с упомянутыми V-образными редукторами винтов, но и оснащена как вспомогательно-зарядной ЭСУ, включающей ОЭМГ с валом ротора, выходящим в противоположные стороны для передачи крутящего момента и вращательно связанным соосно с выходным и входным валами соответственно БЭД, вращаемого от его статора, и упомянутой электромагнитной синхронизирующей муфты сцепления V-образного редуктора поперечных винтов, так и системой управления электропривода, включающей все аккумуляторные быстро перезаряжаемые батареи и водородно-воздушные топливные элементы, преобразователь энергии с блоком управления силовой передачи, подключающим и отключающим БЭД и ОЭМГ, а также переключающим дополнительную как электрическую, так и генерирующую мощность ОЭМГ соответственно при его работе как в режиме электромотора и при передаче пиковой мощности совместно с БЭД на V-образный редуктор соответствующих поперечных винтов для выполнения ВВП или зависания в перегрузочном варианте и при этом с его питанием от аккумуляторов и топливных элементов совместно с БЭД, так и в режиме электрогенератора для подзарядки аккумуляторов от ОЭМГ, который после выполнения ВВП и переходного маневра при горизонтальном положении корпуса-крыла, но и отключения передних винтов по полету от трансмиссии и при полетной конфигурации двухвинтового кольцеплана обеспечивает способ генерации электрической номинальной мощности только от внутреннего источника энергии - выходной вал, вращаемый от статора БЭД, получающий электроэнергию при этом только от топливных элементов и одновременно передающий крутящий момент с выходного вала, вращаемого от ротора БЭД, на входной вал V-образного редуктора соответствующих продольных винтов. При этом левая и правая мотогондолы, выполненные в виде соответствующих быстро съемных обтекателей, имеющих специальные внутренние каркасы для совместно смонтированных аккумуляторных батарей и топливных элементов, установленных соответственно от переднего и заднего конца до середины каждого обтекателя и подключенных посредством коммутационных специальных делителей мощности к БЭД и ОЭМГ таким образом, что все аккумуляторы и топливные элементы соединены между собой последовательно размещены соответственно в передних и задних частях левого и правого каркасов таким образом, что соответственно положительные и отрицательные клеммы их полюсов соединены между собой посредством переднего и заднего контакторов, а отрицательные и положительные клеммы их полюсов соединены в средней части левого и правого каркаса совместно с делителем мощности через соответствующие переключатели режимов, левый и правый из которых включены между соответствующими минусами и плюсами клемм и которые подключают напряжение или совместно от аккумуляторов и топливных элементов и к БЭД, и ОЭМГ или только по отдельности к ОЭМГ и БЭД соответственно от аккумуляторов и топливных элементов. Причем между плюсами и минусами клемм левого и правого каркасов как, топливных элементов, так и аккумуляторов на фронтальном виде включены как задний, так и передний контакторы, которые автоматически подключают и отключают напряжение как на БЭД в момент его запуска с катапульты или отстрела его в специальном контейнере с торпедного аппарата с замедлением до двух секунд и подает напряжение на БЭД при переключении его питания с топливных элементов на аккумуляторы соответственно, так и на ОЭМГ в момент выполнения ВВП или зависания в перегрузочном варианте и переключении его в режим работы электромотора соответственно, но и подключает и отключает вырабатываемое напряжение от ОЭМГ в режиме его работы как электрогенератора и подачу на аккумуляторы после срабатывания емкостного датчика соответственно при достижении (25% емкости аккумуляторов) полной Их зарядке и при одновременном (подключении) отключении вращения ОЭМГ от выходного вала БЭД, вращаемого от его статора. С целью возможности его использования в двух средах: в воздухе и на/под воде/водой он выполнен с полностью электрической его герметизированной ЭСУ, но и отстрела в специальном контейнере со стандартного 533-мм торпедного аппарата он оснащен автоматически складываемыми/раскладываемыми левой, правой и верхней консолями внешнего крыла как у упомянутой нижней консоли с обеспечением их размещения как бы в описываемом круге диаметром соответствующему внутреннему диаметру специального контейнера, выполненного в виде как бы «айсберга» после его нахождения в плавучем состоянии или «спящем» (по необходимости) режиме на морской поверхности таким образом, чтобы верхняя часть, имеющая 1/3 длины от общей его длины и автоматически открываемый верхний люк, размещалась в надводном положении, а нижняя более тяжелая часть была соответственно в подводном состоянии и с автоматической катапультой, срабатываемой или по программе от бортового контроллера только после открытия верхнего люка, или по радиоканалу закрытой связи при прямой радиовидимости, или по спутниковому каналу в зоне его действия для автоматического режима без участия оператора как взлета, облета маршрута по заданным точкам, так и автоматическое изменение маршрута (по необходимости), но и режим возвращения «домой» к плавающему контейнеру и вертикальную посадку во внутрь последнего, обеспечиваемую в автоматическом режиме таким образом, что верхний полусферический люк, выполненный с четырьмя раскрываемыми секторами, образующими при их отклонении на угол 45° наружу как бы внешние направляющие для вертикальной посадки, каждая из которых срабатывает отклонение во внутрь для достижения автоматической соосности контейнера и корпуса-крыла, имеющего в нижней части в продолжении внешних бортов обтекателей выдвижной конус, выполненный как бы в виде трубчатого корпуса четырехспицевого зонта, но и осуществления его опускания во внутрь последнего. Что позволит взлететь из плавающего контейнера типа "Sea Robin", например, БКСК-0,013 с ПД мощностью 24 л.с. и перекрещивающимися винтами диаметром 0,44 м и взлетном весе 51 кг при взлетной тяге несущих винтов - 64 кгс и иметь полезную нагрузку 13 кг и массу топлива 12 кг и время крейсерского полета до 6 часов при времени зависания 0,5 ч.
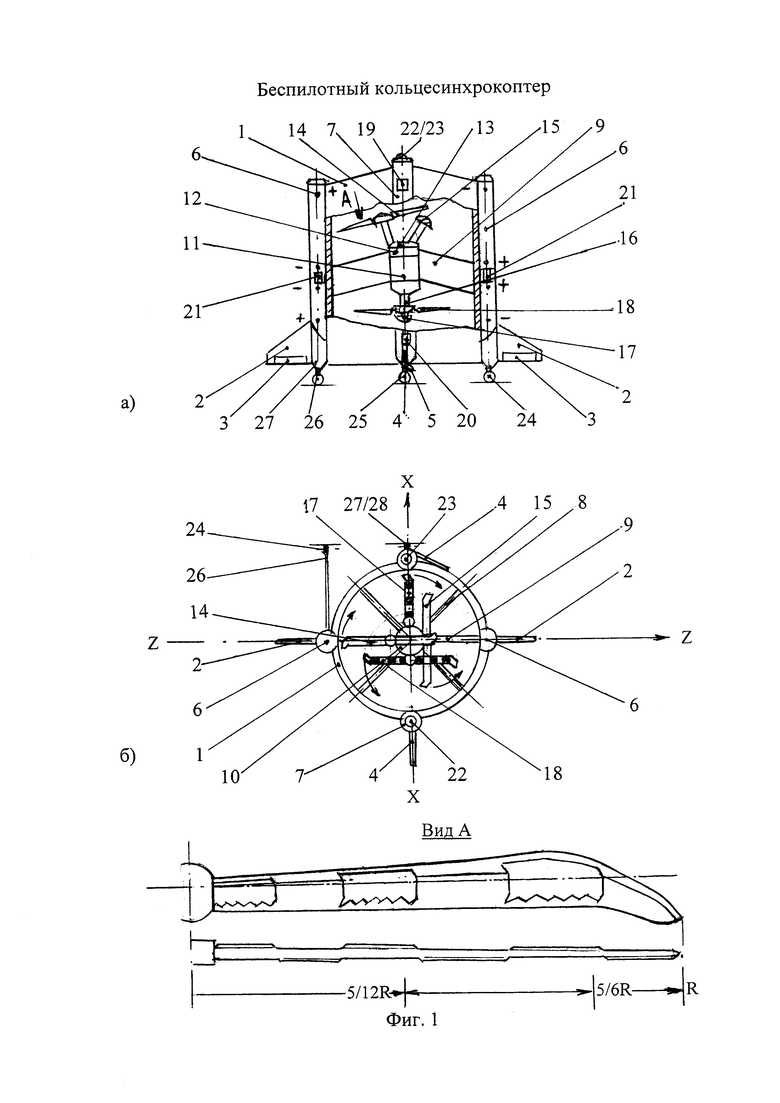
Предлагаемое изобретение полностью электрического БКСК корабельного базирования и варианты его использования иллюстрируются общими видами на фиг. 1.
На фиг. 1a изображен БКСК на общем виде спереди в полетной конфигурации двухвинтового кольцеплана при горизонтальном положении круглого корпуса-крыла и крейсерском скоростном полете с передними винтами во флюгерном положении.
На фиг. 1б изображен БКСК на общем виде сверху в полетной конфигурации четырехвинтового кольцесинхрокоптера при вертикальном положении круглого корпуса-крыла и выполнении ВВП со сложенной нижней консолью внешнего крыла.
Высокоскоростной полностью электрический БКСК корабельного базирования, представленный на фиг. 1 и снабженный движительно-несущей системой, выполнен по поперечно-продольной схеме ЯРПВ-Х2×2 и концепции "бесхвостка" с кольцевым крылом 1, содержит горизонтальные 2 с элевонами 3 и вертикальные 4 с рулями направления 5 стреловидные консоли крестообразного внешнего крыла, смонтированные соответственно на концах двух гондол 6 и двух обтекателей 7, размещенных снаружи кольцевого корпуса-крыла 1. Центральное тело, смонтированное внутри корпуса-крыла 1 на профилированных ребрах жесткости 8 и стреловидных секциях 9 внутреннего крыла, имеющего угол стреловидности по передней кромке равный χ=15°, размещено в плоскости горизонтальных стреловидных консолей 2 внешнего крыла. В обтекателе 10 центрального тела установлены БЭД 11 и ОЭМГ 12. Последовательного возбуждения и открытого типа БЭД 11, обеспечивающий вращение как статора, так и ротора в противоположные стороны, выходные валы которых, направленные также в противоположные стороны, соединены с нагрузкой для передачи крутящего момента и вращательно связаны соответственно через как поперечный 13 V-образный редуктор с верхними левым 14 и правым 15 винтами, так и с продольный 16 V-образный редуктор с нижними передним 17 и задним 18 винтами, последние два представлены на фиг. 1 с синусоидальными утончениями лопастей. Левая и правая гондолы 6 имеют быстро съемные каркасы для совместного размещения аккумуляторных батарей и топливных элементов (на фиг. 1 не показаны), установленных соответственно от переднего и заднего конца до середины каждой гондолы 6 и подключенных посредством коммутационных делителей мощности к БЭД и ОЭМГ так, что все аккумуляторы и топливные элементы соединены между собой последовательно и размещены соответственно в передних и задних частях левого и правого каркасов так, что положительные и отрицательные клеммы их полюсов соединены между собой посредством соответственно переднего 19 и заднего 20 контакторов, а отрицательные и положительные клеммы их полюсов соединены в средней части левого и правого каркаса совместно с делителем мощности через соответствующие переключатели 21 режимов, левый и правый из которых включены между соответствующими минусами и плюсами их клемм и которые подключают напряжение или совместно от аккумуляторов и топливных элементов и к БЭД, и ОЭМГ или только по отдельности к ОЭМГ и БЭД соответственно от аккумуляторов и топливных элементов. Целевая нагрузка - оптико-электронная, радиотехническая и разведывательная аппаратура (для видовой разведки, телевизионного и инфракрасного наблюдения местности в реальном масштабе времени), а также широкополосный передатчик с антенной для передачи изображения по телевизионному радиоканалу размещена в более длинных обтекателях 7, имеющих спереди оптические гиростабилизированные фотовидеосистемы 22, нижняя 23 из которых работает в инфракрасном диапазоне. При вертикальном расположении корпуса-крыла 1 на концах гондол 6 и обтекателей 7 используется четырехопорное неубирающееся шасси с небольшими самоустанавливающимися колесами соответственно 24 и 25 на амортизационных стойках 26, смонтированных в обтекателях 27. Для уменьшения как стояночных габаритов, так и возможности размещения внутри контейнера для подводного старта с шахты подводной лодки с вертикальным расположением корпуса-крыла 1 все консоли 2-3 внешнего крыла выполнены отклоняемыми к его центру. При выполнении КВП и горизонтальном расположении корпуса-крыла 1 используются вспомогательные боковые опоры с отклоняемыми амортизационными стойками 26 и колесами 24, смонтированными в нишах гондол 6, четырехопорного шасси велосипедной схемы, носовая и кормовая основные его опоры с колесами 27 и 28 размещены в соответствующих нишах нижнего обтекателя 7.
Управление высокоскоростным БКСК обеспечивается общим и дифференциальным изменением шага поперечных (верхних) 14-15 и продольных (нижних) 16-17 несущих винтов, но и отклонением рулей направления 5 и элевонов 3 соответственно вертикальных и горизонтальных консолей внешнего крыла 2. При крейсерском полете подъемная сила создается кольцевым 1, внешним 2 и внутренним 9 крыльями, горизонтальная тяга - винтами только задними 17-18, на режиме висения только винтами поперечными 14-15 и продольными 17-18, на режиме перехода - крыльями 1, 2 и 9 с винтами поперечными 14-15 и продольными 17-18. При горизонтальном расположением корпуса-крыла 1 и выполнении КВП подъемная сила создается крыльями 1, 2 и 9 с соответствующим отклонением элевонов 3 внешнего крыла 2.
После крейсерского горизонтального полета и при переходе к вертикальной посадке (висению) боле приемлемой является технология постепенного перехода с увеличенным углом атаки крыльев 1, 2 и 9, чем переход «свечкой», когда БКСК сделав «свечку» переходит в вертикальное положение, после его зависания, он может затем снижаться хвостом вниз. Причем при посадке БТСН с взлетным весом до 5-ти тонн с переходом «свечкой» требуется иметь потолок вертикального подъема по крайней мере 800 м, в то время как постепенный переход от горизонтального полета к вертикальному зависанию перед посадкой можно выполнить и на высоте 150 м. Для вертикального подъема БКСК исполнения ЯРПВ-Х2×2 необходимо одновременно увеличить шаг двух поперечных (верхних) 14-15 и двух продольных (нижних) 17-18 несущих винтов с одновременным увеличением мощности всех двигателей ЭСУ, и он вертикально поднимется до высоты 60 м. На этой высоте после уменьшения шага винтов верхних 14-15 и нижних 17-18 и мощности двигателей до тех пор, пока БКСК не зависнет при вертикальном положении его корпуса-крыла 1. При висении на вертолетных режимах полета поперечное и продольное управление БКСК осуществляется при одновременном изменении шага двух несущих винтов в верхней 14-15 и нижней 17-18 группе соответственно, а путевое управление - при одновременном изменении крутящих моментов каждой диагонально расположенной группы винтов, имеющих одинаковое направление вращения несущих винтов, например, двух винтов верхний/нижний 14/17, размещенные соответственно по осям Z-Z/X-X и двух винтов верхний/нижний 15/18, размещенные соответственно параллельно осям X-X/Z-Z.
После завершения режима висения БКСК для горизонтального его полета он переходит на режим наклона и, наклоняясь носом вниз, он начнет перемещаться горизонтально. По мере увеличения наклона БКСК скорость его увеличится и возможен переход к скоростному его горизонтальному полету. После набора высоты и после перехода БКСК на крейсерский режим полета передние винты 14-15 отключаются от трансмиссии синхронно устанавливаются во флюгерное положение и затормаживаются. При этом путевое управление обеспечивается рулями направления 5 вертикальных консолей 4 внешнего крыла. Продольное и поперечное управление БКСК осуществляется синфазным и дифференциальном отклонением элевонов 3 горизонтальных консолей внешнего крыла 2 соответственно. На самолетных режимах полета БКСК при создании горизонтальной тяги его задние винты 17-18 - толкающие импеллеры имеют взаимно противоположное их вращения и, тем самым, соответственно устраняют гироскопический эффект и обеспечивают более плавное обтекание его крыльев 1 и 9, но и весьма повышающее эффективность крейсерского скоростного полета.
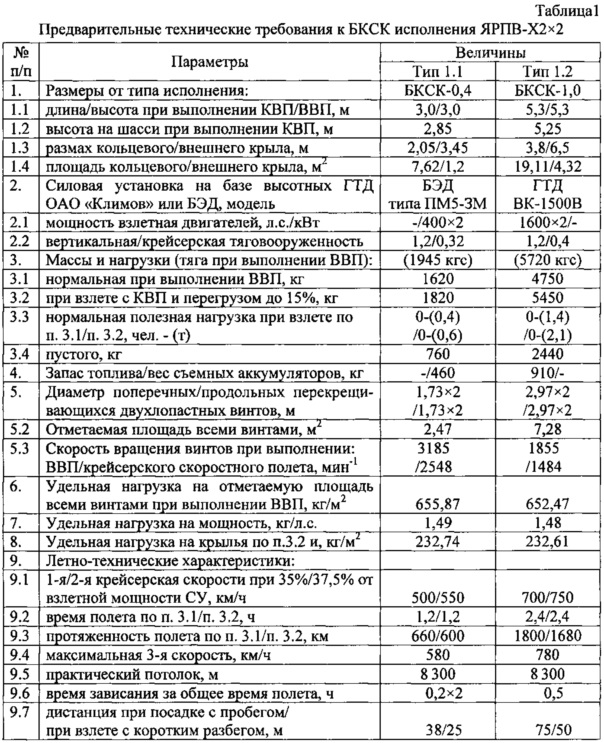
Таким образом, конструктивно-силовая схема кольцевого крыла с консолями внешнего крыла обеспечивают максимальную разгрузку и корпуса-крыла, и несущих винтов от действия аэродинамических и массовых сил, а вертолеты с перекрещивающимися винтами, что они устойчивы и управляемы, а, значит, все они пригодны для дальнейших инженерных приложений и могут являться предметом их исследования и усовершенствования. Поэтому дальнейшие исследования по созданию БКСК исполнения ЯРПВ-Х2×2, используя вышеназванные преимущества, позволят освоить ряд их типоразмеров, особенно, полностью электрического БКСК-0,4, размещенного в специальном контейнере диаметром 2,1 м, запускаемом с шахты подводной лодки из подводного ее положения, и вертикальновзлетающего из нутрии плавающего контейнера на поверхности моря, готового затем и обратно для приема БКСК (см. табл. 1).
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПИЛОТНЫЙ КОНВЕРТОПЛАН С КАНАЛЬНЫМИ ВИНТАМИ | 2016 |
|
RU2629473C1 |
| МНОГОВИНТОВОЙ ПРЕОБРАЗУЕМЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2014 |
|
RU2548304C1 |
| МНОГОВИНТОВОЙ ПРЕОБРАЗУЕМЫЙ БЕСПИЛОТНЫЙ ВЕРТОЛЕТ | 2014 |
|
RU2550909C1 |
| БЕСПИЛОТНЫЙ ТЯЖЕЛЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2667433C2 |
| МНОГОВИНТОВОЙ КОНВЕРТИРУЕМЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2014 |
|
RU2568517C1 |
| БЕСПИЛОТНЫЙ КОНВЕРТОПЛАН С АРОЧНЫМ КРЫЛОМ | 2017 |
|
RU2648503C1 |
| МНОГОВИНТОВОЙ БЕСПИЛОТНЫЙ ВИНТОКРЫЛ | 2016 |
|
RU2611480C1 |
| АВИАЦИОННЫЙ РАКЕТНЫЙ КОМПЛЕКС С БЕСПИЛОТНЫМ УДАРНЫМ ВЕРТОЛЕТОМ-САМОЛЕТОМ | 2017 |
|
RU2674742C1 |
| БЕСПИЛОТНЫЙ УДАРНЫЙ САМОЛЕТ-ВЕРТОЛЕТ | 2019 |
|
RU2733678C1 |
| АВИАЦИОННО-РАКЕТНАЯ УДАРНАЯ СИСТЕМА | 2019 |
|
RU2721803C1 |
Изобретение относится к области авиационной техники, в частности к конструкциям беспилотных авиационных комплексов (БАК). БАК состоит из беспилотного кольцеплана-синхроптера и транспортно-пускового контейнера. Кольцеплан-синхроптер содержит снаружи круглого крыла четыре гондолы, двигатели, приводящие посредством трансмиссии винты, четырехопорное шасси с неубирающимися амортизационными стойками и выполнен по аэродинамической схеме "бесхвостка" с упомянутым кольцевым корпусом-крылом, снабженным стреловидными консолями крестообразного внешнего крыла на концах гондол, и концепции ярусного расположения перекрещивающихся винтов. Винты установлены на удлиненных V-образных выходных валах, образующих V-образные редукторы, наклоненных на углы 15° от вертикали соответственно как от, так и вдоль плоскости симметрии. Главный редуктор смонтирован внутри корпуса-крыла на профилированных ребрах жесткости и стреловидных секциях внутреннего крыла. Обеспечивается увеличение весовой отдачи, улучшение поперечной и продольной управляемости, увеличение высоты и дальности полета. 3 з.п. ф-лы, 1 табл., 1 ил.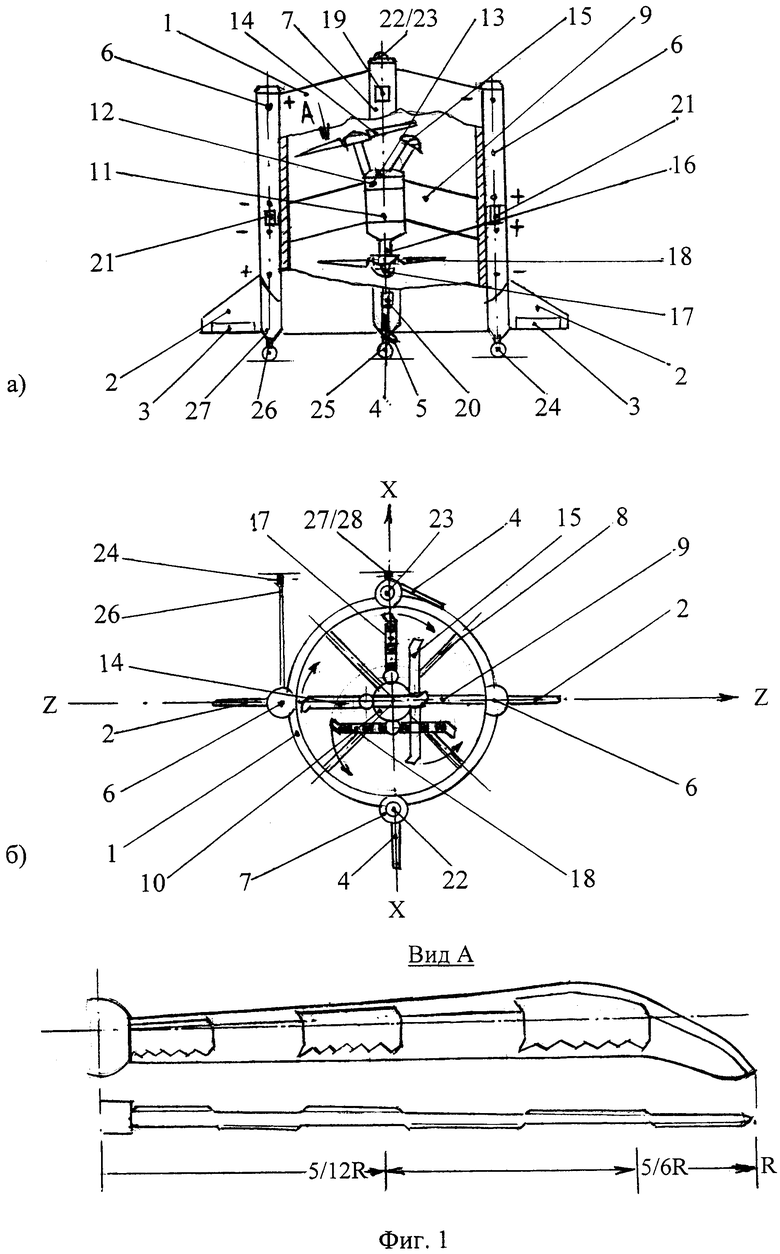
1. Беспилотный авиационный комплекс, состоящий из беспилотного кольцеплана-синхроптера, имеющего снаружи круглого крыла четыре гондолы, двигатели, приводящие посредством трансмиссии винты, четырехопорное шасси с неубирающимися амортизационными стойками, смонтированными на концах четырех гондол, и транспортно-пускового контейнера, отличающийся тем, что он выполнен по аэродинамической схеме "бесхвостка" с упомянутым кольцевым корпусом-крылом, снабженным с взаимно перпендикулярными четырьмя стреловидными консолями крестообразного внешнего крыла, смонтированного не выходя за заднюю кромку корпуса-крыла на концах упомянутых разновеликих гондол, и концепции ярусного расположения перекрещивающихся винтов (ЯРПВ) в схеме ЯРПВ-Х2×2 с противоположным вращением винтов как в верхней поперечной, так и в нижней продольной их парах, установленных на удлиненных V-образных выходных валах, образуя как бы V-образные редукторы, наклоненных на углы 15° от вертикали соответственно как от, так и вдоль плоскости симметрии по оси Х-Х при вертикальном положении корпуса-крыла, имеющего в его центре масс главный редуктор, смонтированный внутри корпуса-крыла на профилированных ребрах жесткости и стреловидных секциях внутреннего крыла, имеющего угол стреловидности по передней кромке, равный χ=15°, и размещенного в плоскости горизонтальных стреловидных консолей внешнего крыла, оснащенных элевонами и на законцовках парой телевизионных камер заднего видового обзора, при этом вертикальные стреловидные консоли внешнего крыла, снабженные рулями направления, смонтированы на соответствующих более длинных гондолах, выполненных в виде удобообтекаемых продольных пилонов, вынесенных за переднюю кромку корпуса-крыла, имеющую с углом стреловидности χ=15° плавно сопряженную конфигурацию с разновеликими гондолами, и оснащенных спереди оптическими гиростабилизированными фотовидеосистемами с обзорностью 270 градусов, нижняя из которых работает в инфракрасном диапазоне, а две менее длинные мотогондолы, вынесенные за переднюю кромку корпуса-крыла, снабжены в передних их частях соответствующими воздухозаборниками двигателей, причем вертикальное положение корпуса-крыла с ярусной поперечно-продольной несущей схемой, выполненной с двухлопастными винтами, имеющими как жесткое крепление лопастей и без изменения циклического их шага, так и возможность изменения общего их шага и установки их лопастей во флюгерное положение после их остановки и фиксации, предопределяет то, что оси вращения винтов, отклоненные от вертикальной оси соответствующего V-образного редуктора, размещены таким образом, что лопасти поперечной группы винтов размещены по оси Z-Z и параллельно оси Х-Х, а лопасти продольной группы винтов в свою очередь размещены по оси Х-Х и параллельно оси Z-Z, при этом между равновеликими винтами, имеющими от всех несущих винтов компенсацию реактивных крутящих их моментов при противоположном направлении их вращения и в поперечной, и продольной группе винтов, но и одинакового их вращения между отдельными винтами поперечной и продольной их групп при вертикальном положении корпуса-крыла и виде сверху как по часовой стрелке, так и против, например, между винтами, размещенными как по осям Z-Z и Х-Х, так и параллельно этим осям соответственно, причем с целью обеспечения возможности выполнения короткого взлета и посадки (КВП) при горизонтальном расположении корпуса-крыла он снабжен выполненным по велосипедной схеме четырехопорным колесным шасси, использующим наряду с двумя вспомогательными колесами, смонтированными на концах левой и правой мотогондол, выполненных с удлиненными стойками, убирающимися в соответствующие задние ниши мотогондол, носовую и кормовую дополнительные основные опоры с неубирающимися амортизационными колесами, смонтированными в соответствующих частях нижнего продольного пилона, оснащенного складывающейся нижней консолью внешнего крыла, обеспечивающей свободное вращение кормового колеса по поверхности при осуществлении взлетно-посадочных режимов, при этом он снабжен возможностью преобразования его полетной конфигурации с вертолета четырехвинтовой поперечно-продольной несущей схемы при вертикальном расположении его корпуса-крыла в полетную конфигурацию при горизонтальном расположении корпуса-крыла двухвинтового кольцеплана, имеющего отключенные от трансмиссии поперечные винты, лопасти которых установлены во флюгерное положение и зафиксированы с отклонением влево и вправо от плоскости симметрии соответственно параллельно передней кромке корпуса-крыла и плоскости симметрии, оснащен движительной продольной системой с двумя задними по полету винтами, размещенными вдоль плоскости симметрии и представляющими собой перекрещивающиеся толкающие импеллеры, создающие маршевую тягу для скоростного крейсерского полета, но и обратно, причем его электрическая силовая установка (ЭСУ), выполненная по параллельно-последовательной гибридной технологии силового привода двойного вращения, смонтированная в обтекателе центрального тела, снабжена биротативным электродвигателем (БЭД), обеспечивающим вращение и статора, и ротора в противоположные стороны, выходные валы которых, направленные также в противоположные стороны, соединены с нагрузкой для передачи крутящего момента и вращательно связаны с упомянутыми V-образными редукторами винтов, но и оснащена как вспомогательно-зарядной ЭСУ, включающей обратимый электромотор-генератор (ОЭМГ) с валом ротора, выходящим в противоположные стороны для передачи крутящего момента и вращательно связанным соосно с выходным и входным валами соответственно БЭД, вращаемого от его статора, и упомянутой электромагнитной синхронизирующей муфты сцепления V-образного редуктора поперечных винтов, так и системой управления электропривода, включающей все аккумуляторные быстро перезаряжаемые батареи и водородно-воздушные топливные элементы, преобразователь энергии с блоком управления силовой передачи, подключающим и отключающим БЭД и ОЭМГ, а также переключающим дополнительную как электрическую, так и генерирующую мощность ОЭМГ соответственно при его работе как в режиме электромотора и при передаче пиковой мощности совместно с БЭД на V-образный редуктор соответствующих поперечных винтов для выполнения ВВП или зависания в перегрузочном варианте и при этом с его питанием от аккумуляторов и топливных элементов совместно с БЭД, так и в режиме электрогенератора для подзарядки аккумуляторов от ОЭМГ, который после выполнения ВВП и переходного маневра при горизонтальном положении корпуса-крыла, но и отключения передних винтов по полету от трансмиссии и при полетной конфигурации двухвинтового кольцеплана обеспечивает способ генерации электрической номинальной мощности только от внутреннего источника энергии - выходной вал, вращаемый от статора БЭД, получающий электроэнергию при этом только от топливных элементов и одновременно передающий крутящий момент с выходного вала, вращаемого от ротора БЭД, на входной вал V-образного редуктора соответствующих продольных винтов, при этом левая и правая мотогондолы, выполненные в виде соответствующих быстро съемных обтекателей, имеющих внутренние каркасы для совместно смонтированных аккумуляторных батарей и топливных элементов, установленных соответственно от переднего и заднего конца до середины каждого обтекателя и подключенных посредством коммутационных делителей мощности к БЭД и ОЭМГ таким образом, что все аккумуляторы и топливные элементы соединены между собой, последовательно размещены соответственно в передних и задних частях левого и правого каркасов таким образом, что соответственно положительные и отрицательные клеммы их полюсов соединены между собой посредством переднего и заднего контакторов, а отрицательные и положительные клеммы их полюсов соединены в средней части левого и правого каркаса совместно с делителем мощности через соответствующие переключатели режимов, левый и правый из которых включены между соответствующими минусами и плюсами клемм и которые подключают напряжение или совместно от аккумуляторов и топливных элементов и к БЭД, и ОЭМГ или только по отдельности к ОЭМГ и БЭД соответственно от аккумуляторов и топливных элементов, причем между плюсами и минусами клемм левого и правого каркасов как топливных элементов, так и аккумуляторов на фронтальном виде включены как задний, так и передний контакторы, которые автоматически подключают и отключают напряжение как на БЭД в момент его запуска с катапульты или отстрела его в упомянутом транспортно-пусковом контейнере с торпедного аппарата с замедлением до двух секунд и подает напряжение на БЭД при переключении его питания с топливных элементов на аккумуляторы соответственно, так и на ОЭМГ в момент выполнения ВВП или зависания в перегрузочном варианте и переключении его в режим работы электромотора соответственно, но и подключает и отключает вырабатываемое напряжение от ОЭМГ в режиме его работы как электрогенератора и подачу на аккумуляторы после срабатывания емкостного датчика соответственно при достижении 25% емкости аккумуляторов до полной их зарядке и при одновременном подключении или отключении вращения ОЭМГ от выходного вала БЭД, вращаемого от его статора, при этом с целью возможности его использования в двух средах: в воздухе и на/под воде/водой он выполнен с полностью электрической его герметизированной ЭСУ, но и отстрела в упомянутом транспортно-пусковом контейнере со стандартного 533-мм торпедного аппарата он оснащен автоматически складываемыми/раскладываемыми левой, правой и верхней консолями внешнего крыла как у упомянутой нижней консоли с обеспечением их размещения в описываемом круге диаметром, соответствующем внутреннему диаметру упомянутого транспортно-пускового контейнера, представляющего собой плавающий «бакен», находящийся в плавучем состоянии или «спящем» по необходимости режиме на морской поверхности так, чтобы верхняя часть, имеющая 1/3 длины от общей его длины с автоматически открываемым верхним люком, размещалась в надводном положении, а нижняя более тяжелая часть была соответственно в подводном состоянии, и с автоматической катапультой, срабатываемой или по программе от бортового контроллера только после открытия верхнего люка, или по радиоканалу закрытой связи при прямой радиовидимости, или по спутниковому каналу в зоне его действия для автоматического режима без участия оператора как взлета, облета маршрута по заданным точкам, так и автоматическое изменение маршрута по необходимости, но и режим возвращения «домой» к плавающему контейнеру и вертикальную посадку вовнутрь последнего, обеспечиваемую в автоматическом режиме таким образом, что верхний полусферический люк, выполненный с четырьмя раскрываемыми секторами, образующими при их отклонении на угол 45° наружу внешние направляющие для вертикальной посадки, каждая из которых срабатывает отклонение вовнутрь для достижения автоматической соосности контейнера и корпуса-крыла, имеющего в нижней части в продолжении внешних бортов обтекателей выдвижной конус, выполненный в виде трубчатого корпуса четырехспицевого зонта, но и осуществления его опускания вовнутрь последнего, а также герметичного закрывания полусферического люка для подготовки транспортирования контейнера с ним или подводным способом подводным роботом с захватом для перемещения его в отсек подводной лодки или надводным способом корабельным манипулятором с захватом для перемещения его на палубу корабля.
2. Беспилотный авиационный комплекс по п. 1, отличающийся тем, что на конце каждой его лопасти, имеющей саблевидную форму в плане с заостренной по направлению к ее концу каждой оживальной законцовкой, имеющей на ее конце переднюю кромку с углом стреловидности, составляющим χ=44°, при этом каждая лопасть в некоторой зоне на ее конце, располагающейся на участке между от 5/6 R до полного радиуса каждой лопасти R, т.е. размаха данной лопасти с учетом заостренной ее оживальной законцовки, имеет увеличенную степень некоторой линейной аэродинамической крутки с некоторой полной амплитудой, величина которой заключена в диапазоне от -7° до -12°, между центром каждого несущего винта и свободной оживальной законцовкой каждой лопасти, относительная толщина профиля каждой лопасти поддерживается на уровне от 14 до 12% на той части лопасти, где хорда имеет относительно небольшую длину, т.е. до элементарного поперечного сечения, располагающегося на уровне примерно от корневой ее части до 5/12 полного размаха каждой лопасти, имеющей на полном ее размахе профили между элементарным поперечным сечением, располагающимся в зоне на участке от 5/12 полного размаха каждой лопасти до конца каждой лопасти, относительная толщина которой уменьшается линейным образом, образующим двукратное ее относительное утончение до уровня от 7 до 6%, в частности на заостренном участке между началом и концом оживальной законцовки каждой лопасти, образуя в радиальном направлении вдоль всей протяженности полного размаха как бы усеченную ее клиновидность.
3. Беспилотный авиационный комплекс по п. 2, отличающийся тем, что каждая упомянутая лопасть вдоль всей протяженности ее полного размаха R разделена на ряд четных разновеликих зон как на ее верхней, так и нижней поверхностях, выполненных от ее начала соответственно как от первой все нечетные, так и от второй все четные зоны с наклеенными, отступая 7 мм от центра давления лопасти к ее передней кромке, из термопластичного полиуретана полосками, имеющими удвоенную длину от их ширины, равной b=5/9 аэродинамической хорде лопасти соответствующей зоны с утонченностями передней и задней ее кромки, выполненной пилообразной, но и от толщины 0,5 мм к утонченностям каждой из трехгранных боковых сторон, выполненных как бы по радиусам соответствующей зоны, каждая из которых, начиная от конца лопасти, ее четная нижняя наклейка с последующей нечетной верхней наклейкой образуют как бы синусоидальную конфигурацию вдоль полного ее размаха R.
4. Беспилотный авиационный комплекс по п. 3, отличающийся тем, что с целью возможного его использования в двух средах: как в воздухе, так и под водой, каждая упомянутая лопасть выполнена, например, из композиционных материалов с одновременным формованием упомянутых синусоидальных конфигураций таким образом, чтобы образованные упомянутые утонченности вдоль протяженности полного ее размаха R имели боковые стороны, выполненные по радиусу соответствующей зоны.
| WO 03004353 A2, 16.01.2003 | |||
| Регулятор переменного тока | 1959 |
|
SU130952A1 |
| US 5295643 A, 22.03.1994 | |||
| US 2007158494 A1, 12.07.2007. | |||

