Изобретение относится к медицине, а именно к травматологии и ортопедии и может использоваться для стабилизации плечевого сустава при его хронической нестабильности.
Известны несколько способов восстановления дефекта переднего края суставной впадины лопатки при хронической нестабильности плечевого сустава.
Операция Бристоу-Латарже/Bristow-Latarjet (The Bristow-Latarjet procedure, a historical note on a technique in comeback, J. A. van der Linde, R. van Wijngaarden, M. P. Somford, D F. P van Deurzen, M. P. J. van den Bekerom, European Society of Sports Traumatology, Knee Surgery, Arthroscopy (ESSKA) 2015, published online 1 august 2015, p.4). Используя дельтопекторальный доступ обнажается клювовидный отросток, и его верхушка предварительно просверливается. Клювовидный отросток отрезается между местами прикрепления мышцы coracobrachialis и местом прикрепления малой грудной мышцы. Рука помещается в наружную ротацию и передний край гленоида обнажается вертикальным разрезом сухожилия подлопаточной кости вблизи места прикрепления к плечевой кости. Подлопаточная часть очищается от капсулы. Удаляют измельченную надкостничную соединительную ткань на передней шейке плечевой кости. После того, как шейка лопатки подготовлена с помощью сверла, клювовидный отросток прижимается к шейке лопатки и крепится к шейке лопатки винтом диаметром 3,0 или 3,5 мм. Винт должен быть перпендикулярен передней поверхности шейки лопатки на полпути между верхним и нижним косыми краями гленохумаральной поверхности. Затем руку помещают во внутреннюю ротацию и подлопаточное сухожилие ушивают с достаточным перекрытием.
Недостатками данного способа являются: необходимость формирования костного трансплантата из клювовидного отростка лопатки, трудность позиционирования фрагмента относительно суставной поверхности гленоида, ограничение возможности интраоперационного рентген-контроля позиции костного трансплантата, ограничение возможности подбора трансплантата в зависимости от размера дефекта суставной поверхности гленоида, риск несращения и резорбции костного трансплантата, риск деструкции, раскалывания трансплантата при его установке, риск повреждения плечевого сплетения и кожно-мышечного нерва. В связи с изменением анатомии клювовидного отростка лопатки происходит нарушение биомеханики и ограничение наружной ротации в плечевом суставе.
Операция Латарже/Open-Latarje (Latarjet Procedure for the Treatment of Anterior Glenohumeral Instability, Woodmass, Jarret M. MD, FRCSC1,2; Wagner, Eric R. MD, MSc1,3; Solberg, Muriel BSc1,4; Hunt, Tyler J. BS1,5; Higgins, Laurence D. MD, MBA1,6, JBJS Essential Surgical Techniques: published July-September 2019, Volume 9, Issue 3, pe 31, doi: 10.2106/JBJS.ST.18.00025, p.1). Открытая операция Латарже эффективна для лечения рецидивирующей передней плечевой нестабильности и предпочтительна по сравнению с артроскопической репарацией Банкарта при наличии дефекта гленоида. Процедура Латарже включает в себя перенос коракоида в переднюю часть гленоида на следующих этапах. Этап 1: Предоперационное планирование включает в себя оценку деформации гленоида и целостности вращательной манжеты. Степень потери костной массы измеряется с использованием метода круговых линий. Этап 2: Пациент находится в положении пляжного кресла с рукой в пневматическом держателе для рук. Используется система параллельных направляющих сверла с канюлированными винтами диаметром 3,75 мм. Этап 3: Делается разрез от 5 до 6 см по передней подмышечной линии. Устанавливается дельтопекторальный интервал, и головная вена мобилизуется латерально. Коракоакромиальная связка рассечена на 15 мм латеральнее коракоида, чтобы обеспечить последующее восстановление передней капсулы. Малая грудная клетка отделяется поднадкостнично от медиального коракоида. Осциллирующая пила под углом 90° используется для рассечения коракоида медиально-латерально. Корако-плечевая связка освобождается. Этап 4: В коракоиде проделываются два отверстия диаметром 4,0 мм на расстоянии 1 см друг от друга. Нижняя поверхность декорирована. Этап 5: Подлопаточная мышца разделяется на стыке двух верхних третей и одной нижней. Продольная капсулотомия выполняется параллельно суставной впадине. Этап 6: Мягкие ткани, включая капсулу и губу, удаляются из передней части гленоида. Кость декортицируется остеотомом и рашпилем. Этап 7: Коракоид расположен заподлицо или на 1 мм глубже относительно гленоида. Две направляющие диаметром 1,6 мм устанавливаются с помощью параллельной направляющей сверла, за которой следует канюлированный расширитель и два канюлированных винта диаметром 3,75 мм. Этап 8: Коракоакромиальная связка прикрепляется к капсуле. Этап 9: Подлопаточный разрез восстанавливается сбоку. Дельтопекторальный интервал и кожа закрыты стандартным способом. После операции применяется стандартизированный протокол реабилитации.
Недостатками данного способа являются: необходимость формирования костного трансплантата из клювовидного отростка лопатки, трудность позиционирования фрагмента относительно суставной поверхности гленоида, ограничение возможности интраоперационного рентген-контроля позиции костного трансплантата при необходимости, ограничение возможности подбора трансплантата в зависимости от размера дефекта суставной поверхности гленоида, т.е. индивидуального подбора, риск несращения и резорбции костного трансплантата, риск деструкции (раскалывания) трансплантата при его установке.
Наиболее близким к заявляемому является имплантат, описанный в патенте «Способ восстановления дефекта переднего края суставной впадины лопатки при хронической рецидивирующей передней нестабильности плечевого сустава» (патентообладатель: ФГБУ "ННИИТО им. Я.Л. Цивьяна" Минздрава России, г. Новосибирск, патент RU 2573803 С1, МПК А61В 6/03, А61В 17/56, опубл. 27.01.2016, Бюл. №3), принятый за прототип.
Способ восстановления дефекта переднего края суставной впадины лопатки при хронической рецидивирующей передней нестабильности плечевого сустава, включающий многосрезовую компьютерную томографию, 3D-реконструкцию на патологической стороне, артроскопическую пластику костного дефекта с помощью трансплантата.
Для изготовления трансплантата при 3D-реконструкции костного дефекта в сагиттальной плоскости при помощи ишиометра воссоздают окружность гленоидальной впадины лопатки, соответствующую правильной анатомической конфигурации суставной впадины лопатки, реконструкцию воссоздают по краям дефекта, высчитывают точную анатомическую конфигурацию, площадь и объем дефекта путем очерчивания контуров дефекта и заштриховывания его в трех плоскостях: горизонтальной, сагиттальной и фронтальной. С учетом ранее полученных данных при 3D-реконструкции в соответствии с размерами дефекта изготавливают трансплантат из прочного биологически совместимого материала, например пористого никелида титана. Трансплантат выпиливают и обтачивают из заготовок, имеющих круглую или цилиндрическую форму, толщиной от 1 до 3 см. Затем формируют два отверстия, в которые вводят спицы, а затем устанавливают винты.
Недостатками используемого в данном способе устройства являются:
- низкотехнологичный и неточный способ подготовки имплантата, а именно обтачивание и выпиливание заготовок из пористого никелида титана круглой и цилиндрической формы, при этом в процессе производства возможно образование сколов и трещин пористого материала имплантата;
- невозможность придания в пористом имплантате поверхности аналогичной суставной методом обтачивания/шлифования из-за сквозной пористой структуры;
- отсутствие отверстия для манипуляционного инструмента или держателя имплантата, необходимого для правильного позиционирования и установки имплантата в верном направлении;
- отсутствие в имплантате дополнительных отверстий под спицы Киршнера для сохранения ротационной стабильности имплантата в процессе установки;
- риск ослабления и миграции фиксирующих винтов в процессе установки, вследствие деформаций/скалывания поверхностей в отверстиях пористого имплантата из-за неоднородности и разности физико-механических свойств применяемых материалов: винты выполнены из титанового сплава ВТ6 (Ti6Al4V), имплантат выполнен из пористого сплава никелид титана (Porous NiTi), что приводит к ослаблению фиксации имплантата с костью, в результате чего увеличивается риск возникновения резорбции и как следствие появление нестабильности и возникновение миграции имплантата;
- наличие значительного костного дефекта для установки пористого имплантата.
Известен инструмент для установки имплантата, представленный в патенте US 2013/0018466 A1 (WARSAW ORTHOPEDIC INC, и др. 17.01.2013).
Инструмент для установки и позиционирования имплантата - удлиненный держатель в виде трубки и Т-образной ручки. Удлиненный держатель на рабочем конце имеет удерживающий элемент в виде пальцев, которые вводят в пазы на боковых стенках имплантата. Между пальцами на рабочем конце имеется фиксирующий элемент, который вводят в отверстие на конце имплантата.
Недостатками инструмента для установки имплантата являются: массивные пальцы на рабочем конце, предназначенные для захвата и позиционирования имплантата в пространстве, существенно ограничивают визуальный контроль точности проведения имплантата в узком операционном пространстве, включающем мышцы и сухожильный комплекс, при необходимости ротации и поворота имплантата в пространстве усилия, прилагаемые к элементам имплантата пальцами инструмента, могут привести к разрушению конструкции.
Наиболее близким к заявляемому манипулятору является: «Устройство для установки межтелового кейджа из переднего доступа с целью выполнения спондилодеза в поясничном отделе позвоночника» (патентообладатель: ФГБУ «РНИИТО им. P.P. Вредена» Минздрава России, Санкт-Петербург, патент на полезную модель RU 193969 С1, МПК A61F 2/46 A61F 2/44, опубл. 21.11.2019, Бюл. №33).
Устройство выполнено сборно-разборным, включает корпус, состоящий из внешней части и введенной в нее внутренней части, на рабочем конце которой выполнена резьба для вкручивания в центральное резьбовое отверстие кейджа, а на другом - цилиндрообразная рукоятка. На рабочем конце внешней части с торца по одной диаметральной линии выполнены опорные элементы для ответной части кейджа, а с другого конца перпендикулярно опорным элементам выполнена рукоятка, не перекрывающая входное отверстие для введения внутренней части. На рабочем конце внешней части выполнены метки глубины.
Недостатками инструмента для установки имплантата являются:
- массивная Т-образная ручка, существенно ограничивающая визуальный контроль точности проведения имплантата в узком пространстве, включающем нервные окончания;
- отсутствие быстросъемной ручки/рукояти с держателем имплантата не позволит при необходимости увеличить пространство для безопасного и удобного использования инструмента для установки винтов и увеличить обзор врачу;
- наличие резьбовой фиксации инструмента к имплантату увеличивает время на откручивание и удаление инструмента из раны после установки имплантата.
Назначение изобретения: создание набора устройств для установки имплантата повышенной прочности с увеличенной площадью контакта с помощью манипулятора, обеспечивающего точность и надежность позиционирования имплантата для стабилизации плечевого сустава при хронической нестабильности в случаях формирования дефицита суставной поверхности гленоида для предотвращения соскальзывания головки плеча с переднего края гленоида путем замещения костного дефекта.
Назначение изобретения достигается имплантатом для замещения зоны костного дефекта на передней поверхности гленоида лопатки плечевого сустава. Имплантат выполнен из металла в виде объемной фигуры с отверстиями под винты и спицы, форма и размеры которой получены на основании выполнения мультиспиральной компьютерной томографии и трехмерной реконструкции на стороне дефекта. Имеет форму анатомически изогнутой трапециевидной призмы со сглаженным внешним контуром. Изготовлен индивидуально из сверх чистого сплава титан - алюминий - ванадий (Ti6Al4VELI) методом селективного лазерного сплавления на SLM 3D-принтере по трехмерной модели, созданной при проектировании анатомической формы имплантата с использованием гибридного параметрического моделирования и топологической оптимизации с учетом параметров костного дефекта гленоида по данным мультиспиральной компьютерной томографии плечевого сустава. Имеет нижнюю контактную стенку с конусообразными шипами, выгнутую внутрь и верхнюю стенку, идущую с наклоном, под углом выгнутую кнаружи. Верхняя и нижняя стенки имеют технологические отверстия с определенными местоположением, диаметром, глубиной и направлением полученными при проектировании. По углам со стороны передней стенки два сквозных отверстия для установки фиксирующих винтов с конусовидным круговым выступом, образующим площадку под головку винта, в каналы с задаваемым отверстием имплантата направлением и глубиной проведения в кости гленоида. По углам со стороны задней стенки два сквозных отверстия для установки спиц Киршнера в заданном отверстием имплантата направлении. В центре одно глухое отверстие с опорной площадкой и гексагональным углублением для ответной части манипулятора, напротив которого на нижней контактной стенке расположен пин, высота передней стенки больше, чем задней, боковые стенки направлены навстречу под углом α, полученным при проектировании.
Новизна изобретения
1. Имеет форму анатомически изогнутой трапециевидной призмы со сглаженным внешним контуром. Изготовлен индивидуально из сверх чистого сплава титан - алюминий - ванадий (Ti6Al4VELI) методом селективного лазерного сплавления (Selective Laser Melting) на SLM 3D-принтере по трехмерной модели, созданной при проектировании анатомической формы имплантата с использованием гибридного параметрического моделирования и топологической оптимизации с учетом параметров костного дефекта гленоида по данным мультиспиральной компьютерной томографии плечевого сустава. Позволяет придать более точную форму с увеличенным контактом с поверхностью дефекта, а также при предоперационном планировании, корректировать размеры и контурные показатели, задавать местоположение, диаметр, глубину и направления для винтов и спиц. Сплав титана обладает прочностью и инертностью в биологических средах.
2. Имеет нижнюю контактную стенку с конусообразными шипами, выгнутую внутрь и верхнюю стенку, идущую с наклоном, под углом выгнутую кнаружи. Шипы обеспечивают дополнительную стабилизацию имплантата, что способствует улучшенной костной интеграции. Конусообразная форма шипов позволяет глубже проникнуть в поверхность кости и предотвратить ротацию и обеспечить стабильность Вогнутая конфигурация позволяет ориентировать его в необходимом сегменте гленоида без потери площади контакта.
3. Верхняя и нижняя стенки имеют технологические отверстия с определенными местоположением, диаметром, глубиной и направлением полученными при проектировании. По углам со стороны передней стенки два сквозных отверстия для установки фиксирующих винтов с конусовидным круговым выступом, образующим площадку под головку винта, в каналы с задаваемым отверстием имплантата направлением и глубиной проведения в кости гленоида. Конфигурация отверстий позволяет разместить винты на уровне внешнего контура имплантата заподлицо, что предотвращает травмирование мягких тканей. Последовательное введение фиксирующих винтов по предварительно выполненным в определенном заданном направлении костным каналам позволяет достигнуть дополнительной компрессии при введении 1-го винта и стабилизации при введении 2-го винта. Местоположение, величины диаметра, глубины и направления отверстий, а также направление и глубина каналов индивидуальны и зависят от размера гленоида и величины дефекта.
4. По углам со стороны задней стенки два сквозных отверстия для установки спиц Киршнера в заданном отверстием имплантата направлении. Сквозные отверстия с определенными местоположением, диаметром, глубиной и направлением получены при проектировании анатомической формы имплантата и позволяют провести промежуточную фиксацию имплантата спицами Киршнера к передней поверхности гленоида, что усиливает стабилизацию и препятствует ротации при формировании костных каналов для последующей установки винтов.
5. В центре расположено одно глухое отверстие с опорной площадкой и гексагональным углублением для ответной части манипулятора. Гексагональное отверстие позволяет закрепить имплантат в манипуляторе и путем импакции осуществить фиксацию на передней поверхности гленоида с возможностью сохранения ротационной мобильности и адаптацией относительно суставной поверхности.
6. На нижней контактной стенке имплантата расположен пин. Пин на нижней поверхности имплантата позволяет путем импакции осуществить фиксацию на передней поверхности гленоида с возможностью сохранения ротационной мобильности и адаптацией относительно суставной поверхности.
7. Высота передней стенки больше, чем задней. Боковые стенки направлены навстречу под углом α, полученным при проектировании. Снижение высоты передней и заужение боковых стенок по направлению к задней стороне имплантата позволяет получить: более плоскую поверхность для параоссальной адаптации к мягким тканям; компактную форму для уменьшения размеров доступа и удобства установки в процессе операции.
Назначение изобретения достигается также тем, что используется манипулятор для установки имплантата. Выполнен сборно-разборным, включает стержень, на рабочем конце которого выполнен элемент для ответной части имплантата, а на другом находится рукоятка. Имеет внешнюю часть в виде полой трубки, на рабочем конце выполнены метки глубины. Стержень соединен с рукояткой муфтой.
Стержень имеет форму цилиндра с участком, усеченным плоскостью параллельной его продольной оси, с образованием прямоугольной боковой стенки от цилиндрического элемента с гексагональным выступом, имеющим на боковой поверхности круговую проточку с разрезным стопорным кольцом, расположенным на торце рабочего конца стержня для взаимодействия с ответной частью имплантата, до цилиндрической части на противоположном конце, в которой выполнена круговая проточка, за которой следует квадратный четырехгранный конец стержня, взаимодействующий с муфтой.
На стержень нанесены метки глубины для выставления L-образного ограничителя, расположенного на полой трубке с рабочего конца имплантата, и метка для его удаленного расположения. С противоположной стороны полой трубки находится фиксатор в форме цилиндра L-образного ограничителя, с продольным сквозным отверстием для прохождения усеченного участка стержня и с глухим отверстием, идущим перпендикулярно стержню, в котором находится кнопка с рамкой, имеющей выступ в нижней части, взаимодействующий с пружиной фиксации. Рамка имеет прямоугольное отверстие для свободного движения фиксатора при нажатой кнопке и давлении на пружину выступом нижней части рамки и остановки фиксатора при отпущенной кнопке, когда пружина поднимает кнопку с рамкой и нижняя часть отверстия рамки входит в метку глубины стержня.
Муфта имеет внешний цилиндр с круговыми ребрами на поверхности, упорным кольцом со стороны рабочего конца манипулятора и внутренний цилиндр между которыми установлена возвратная пружина. Внешний цилиндр установлен с возможностью движения вдоль внутреннего цилиндра, который на первой ступени со стороны рабочего конца инструмента имеет больший внешний диаметр, чем на второй ступени, образующей с внешним цилиндром полость под возвратную пружину. Во внутреннем цилиндре проходит сквозное отверстие, имеющее с рабочего конца участок с сечением форме квадрата, соответствующего по форме квадратному четырехгранному концу стержня, на двух противоположных стенках которого напротив друг друга выполнены цилиндрические отверстия с внутренним кольцевым выступом под шарики, взаимодействующие с круговой проточкой цилиндрического участка стержня при его установке в муфту. Участок сквозного отверстия с сечением в форме квадрата переходит в цилиндрический участок сквозного отверстия с внутренней резьбой со стороны рукоятки, для взаимодействия с ней.
Рукоятка имеет центральную цилиндроконическую часть, усеченную плоскостями параллельными продольной оси рукоятки сверху и снизу с торцом со стороны рабочей части манипулятора в форме круга с цилиндрическим выступом в центре, имеющим резьбу для соединения с муфтой. На конце рукоятки находится цилиндрический участок, торец которого служит ограничителем и ударной площадкой. Боковая поверхность цилиндроконической части рукоятки и цилиндрического участка покрыты термостойкой резиной.
Новизна изобретения:
1. Стержень соединен с рукояткой муфтой. Стержень имеет форму цилиндра с участком, усеченным плоскостью параллельной его продольной оси, с образованием прямоугольной боковой стенки, которая с фиксатором в форме цилиндра L-образного ограничителя позволяет соединить их в правильном положении.
2. Прямоугольная боковая стенка стержня начинается от цилиндрического элемента с гексагональным выступом, имеющим на боковой поверхности круговую проточку с разрезным стопорным кольцом, расположенным на торце рабочего конца стержня для взаимодействия с ответной частью имплантата, до цилиндрической части на противоположном конце, в которой выполнена круговая проточка, за которой следует квадратный четырехгранный конец, взаимодействующие с муфтой. Соединение с использованием разрезного стопорного кольца позволяет быстро, просто вставить при любом угловом положении гексагональный выступ в имплантат и надежно зафиксировать, что обеспечивает центрирование имплантата на манипуляторе. Дополнительно позволяет удобно завести имплантат в пространство на поверхность дефекта и координировать его конечное положение с последующей фиксацией, тем самым сокращая время оперативного вмешательства и уменьшая травмирование мягких тканей.
3. На стержень нанесены метки глубины для выставления L-образного ограничителя, расположенного на полой трубке с рабочего конца имплантата, и метка для его удаленного расположения. С противоположной стороны полой трубки находится фиксатор в форме цилиндра L-образного ограничителя, с продольным сквозным отверстием для прохождения усеченного участка стержня и с глухим отверстием, идущим перпендикулярно стержню, в котором находится кнопка с рамкой, имеющей выступ в нижней части, взаимодействующий с пружиной фиксации. Рамка имеет прямоугольное отверстие для свободного движения фиксатора при нажатой кнопке и давлении на пружину выступом нижней части рамки и остановки фиксатора при отпущенной кнопке, когда пружина поднимает кнопку с рамкой и нижняя часть отверстия рамки входит в метку глубины стержня. Благодаря меткам и фиксатору удобно выставить L-образный ограничитель на необходимую глубину для обнаружения края поверхности гленоида для более точного позиционирования имплантата. Удаленное положение фиксатора позволяет отвести L-образный ограничитель от рабочего конца и увеличить обзор операционного поля.
4. Муфта имеет внешний цилиндр с круговыми ребрами на поверхности, упорным кольцом со стороны рабочего конца манипулятора и внутренний цилиндр между которыми установлена возвратная пружина. Внешний цилиндр установлен с возможностью движения вдоль внутреннего цилиндра, который на первой ступени со стороны рабочего конца инструмента имеет больший внешний диаметр, чем на второй ступени образующей с внешним цилиндром полость под возвратную пружину. Во внутреннем цилиндре проходит сквозное отверстие, имеющее с рабочего конца в сечении форму квадрата, соответствующего по форме квадратному четырехгранному концу стержня, на двух противоположных стенках которого напротив друг друга выполнены цилиндрические отверстия с внутренним кольцевым выступом под шарики, взаимодействующие с круговой проточкой цилиндрического участка стержня при его установке в муфту. Участок сквозного отверстия с сечением в форме квадрата переходит в цилиндрический участок сквозного отверстия с внутренней резьбой со стороны рукоятки, для взаимодействия с ней. Сквозное отверстие во внутреннем цилиндре, имеющее участок в сечении в форме квадрата, позволяет исключить проворачивание квадратного четырехгранного конца стержня, что обеспечивает надежность соединения. Наличие муфты позволяет снять рукоятку при необходимости, тем самым увеличить доступ для введения инструмента для установки спиц Киршнера и прохождения каналов под фиксирующие винты.
5. Рукоятка имеет центральную цилиндроконическую часть, усеченную плоскостями параллельными продольной оси рукоятки сверху и снизу с торцом со стороны рабочей части манипулятора в форме круга с цилиндрическим выступом в центре, имеющим резьбу для соединения с муфтой. На конце рукоятки находится цилиндрический участок, торец которого служит ограничителем и ударной площадкой. Боковая поверхность цилиндроконической части рукоятки и цилиндрического участка покрыты термостойкой резиной. Рукоятка на внешней части устройства позволяет корригировать положение имплантата как при его заведении, так и когда он уже установлен. Соосное расположение рукоятки относительно стрежня с L-образным ограничителем обеспечивает хороший обзор операционной раны имплантата при установке. Форма рукоятки способствует удобству проведения манипуляций во время операции: позволяет легко присоединить и отсоединить стержень с имплантатом, нанести соосные удары для фиксации имплантата пином в поверхность кости.
Проведенные патентные исследования по подклассам А61В 17/56, A61F 2/44, A61F 2/46 и анализ научно-медицинской информации, отражающей существующий уровень конструкций для восстановления дефекта суставной поверхности гленоида, не выявили устройств, идентичных предложенным. Таким образом, предлагаемые устройства являются новыми. Взаимосвязь и взаимодействие существенных отличительных признаков предлагаемых устройств обеспечивают достижение нового технологического медицинского результата в решении поставленного назначения, а именно повышение эффективности лечения за счет проектирования анатомической формы, изготовления и использования индивидуального имплантата оптимальной формы и размера, малотравматичности хирургического лечения, относительной простоты выполнения операции при условии сохранения анатомической формы замещаемого дефекта, надежной, стабильной фиксации и обеспечения постоянной равномерной компрессии по всей площади имплантата к поверхности дефекта гленоида. Таким образом, предложенное техническое решение имеет изобретательский уровень.
Предлагаемые устройства являются промышленно применимыми в области практического здравоохранения, так как доступно их изготовление на современном уровне развития медицинской промышленности.
Совокупность существенных признаков изобретения позволяет получить новый технический результат:
- увеличить прочность имплантата, за счет использования сверх чистого сплава титан - алюминий - ванадий (Ti6Al4VELI);
- повысить стабильность фиксации имплантата за счет увеличения площади равномерного контакта с поверхностью гленоида;
- с высокой точностью до 20 микрометров придать контуры и размеры имплантату в соответствии с анатомической формой;
- уменьшить вероятность миграции имплантата во всех плоскостях за счет врезания конусообразных шипов в поверхность дефекта гленоида;
- использование пина позволяет первоначально зафиксировать имплантат для уменьшения риска смещения относительно заданного направления;
- определенное местоположение, диаметр, глубина и угол наклона технологических отверстий для винтов и спиц Киршнера; диаметр, глубина и направление проведения каналов с задаваемым отверстием имплантата направлением в кости гленоида для винтов и направлением установки спиц с последующим их введением создает дополнительную компрессию;
- предлагаемая конструкции имплантата и манипулятора позволяют надежно и стабильно закрепить имплантат на манипуляторе при позиционировании имплантата в пространстве во всех направлениях и не ограничивать визуальный контроль в узком пространстве операционного поля, включающем мышцы и сухожильный комплекс, сократить время на проведение операции и упростить ее в целом.
Предложенные устройства и иллюстрирующие материалы, представлены на Фиг. 1 - Фиг. 26.
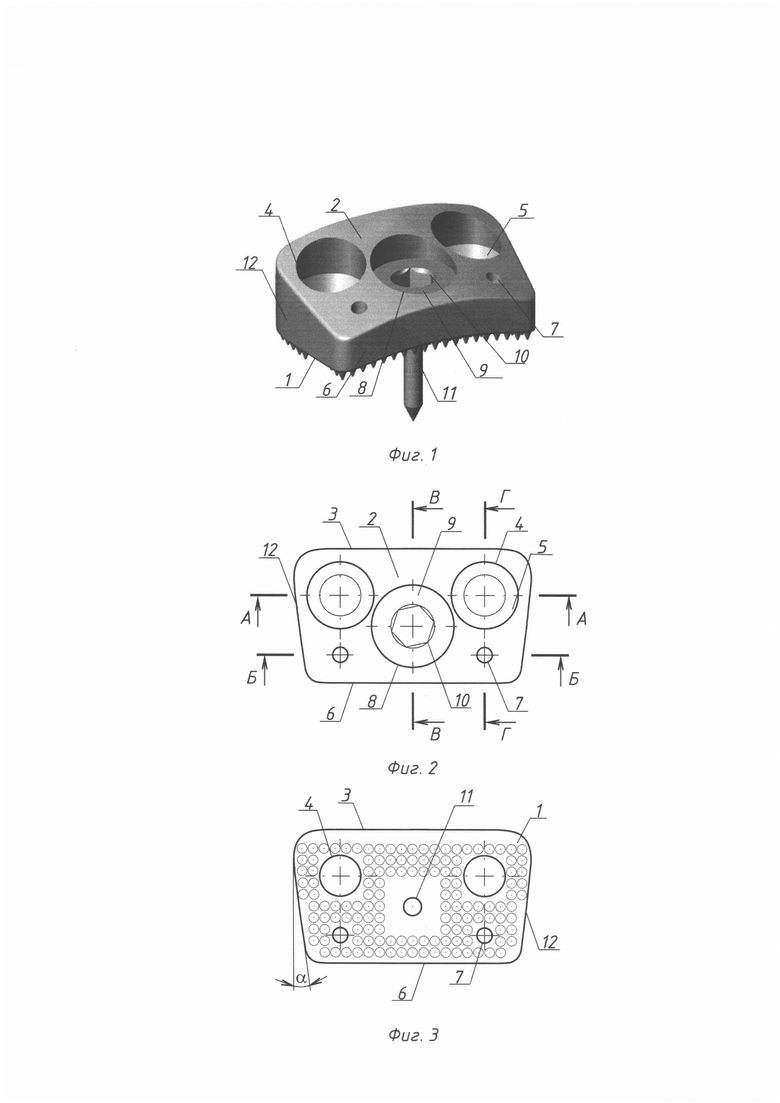
На Фиг. 1 вид имплантата 3D.
На Фиг. 2 вид имплантата сверху.
На Фиг. 3 вид имплантата снизу.
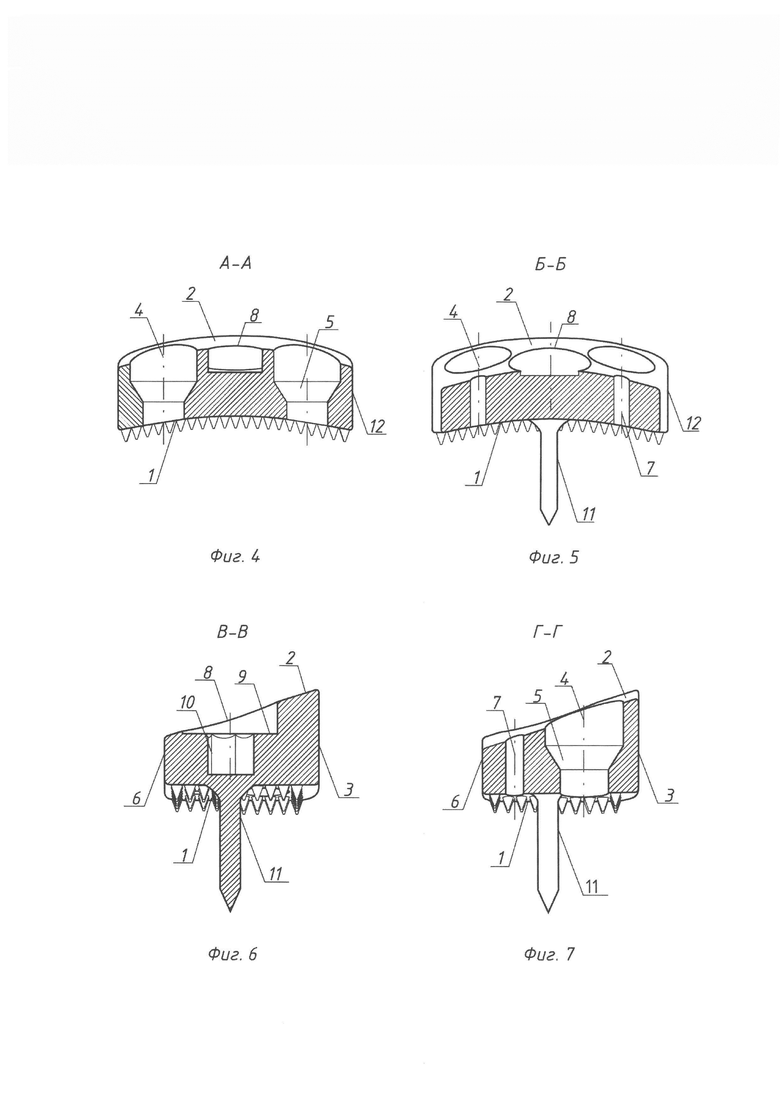
На Фиг. 4 вид имплантата по А-А в разрезе отверстий для винтов.
На Фиг. 5 вид имплантата по Б-Б в разрезе отверстий для спиц Киршнера.
На Фиг. 6 вид имплантата с боку по В-В в разрезе отверстия с гексагональным углублением для манипулятора.
На Фиг. 7 вид имплантата с боку по Г-Г в разрезе отверстий для винта и спицы.
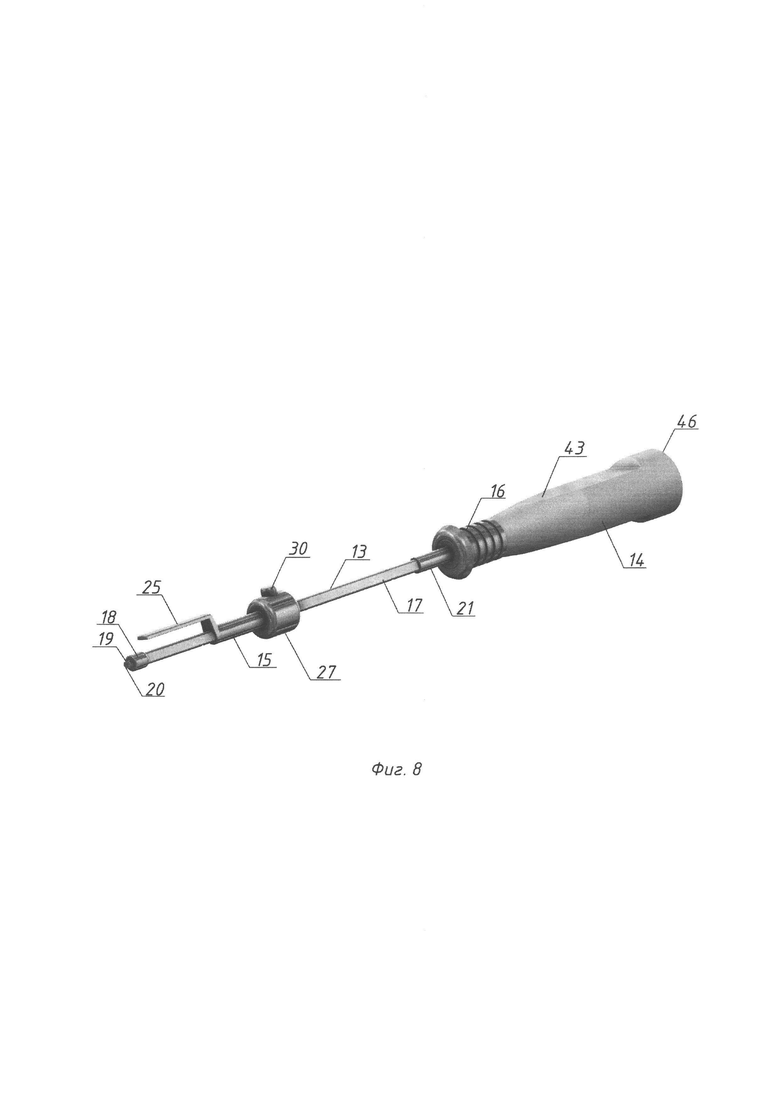
На Фиг. 8 вид манипулятора 3D.
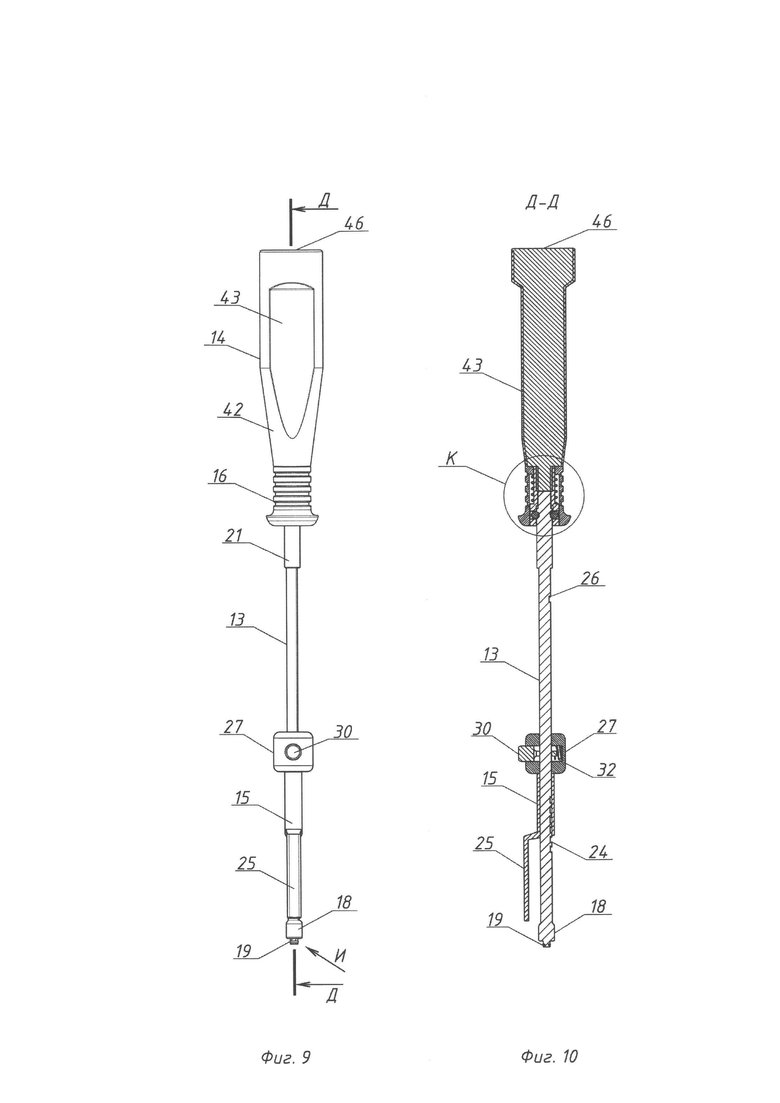
На Фиг. 9 вид манипулятора сверху.
На Фиг. 10 вид манипулятора в разрезе по Д-Д.
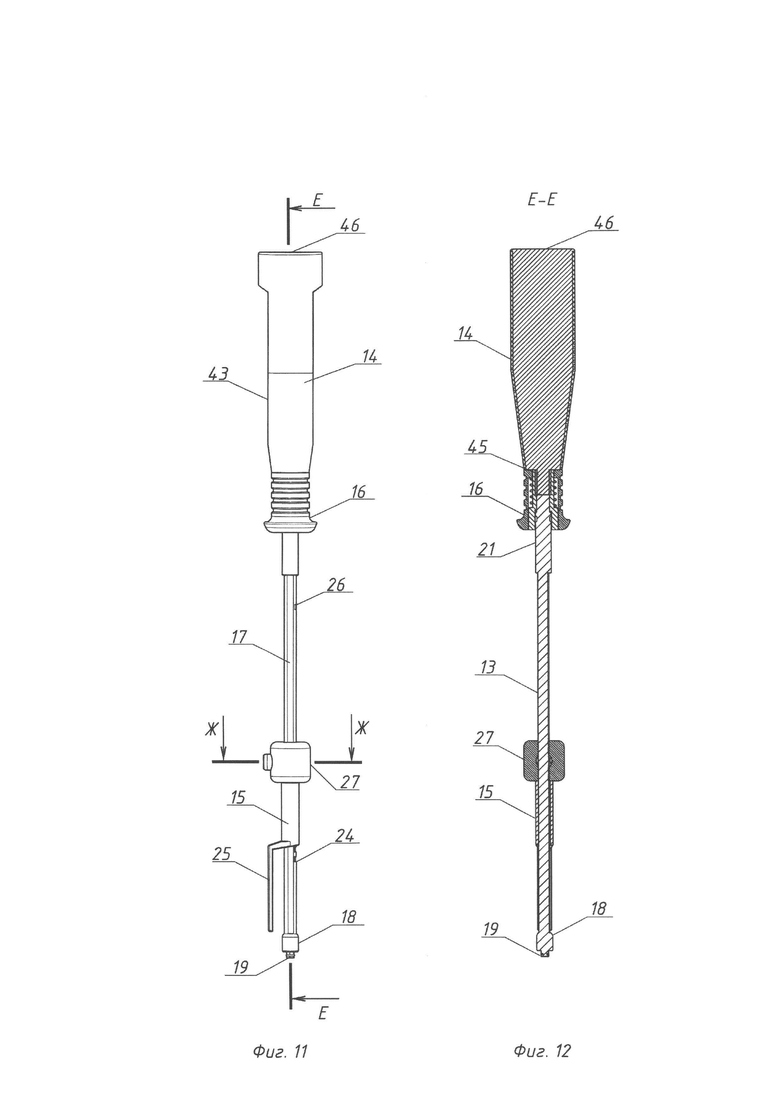
На Фиг. 11 вид манипулятора сбоку.
На Фиг. 12 вид манипулятора в разрезе по Е-Е.
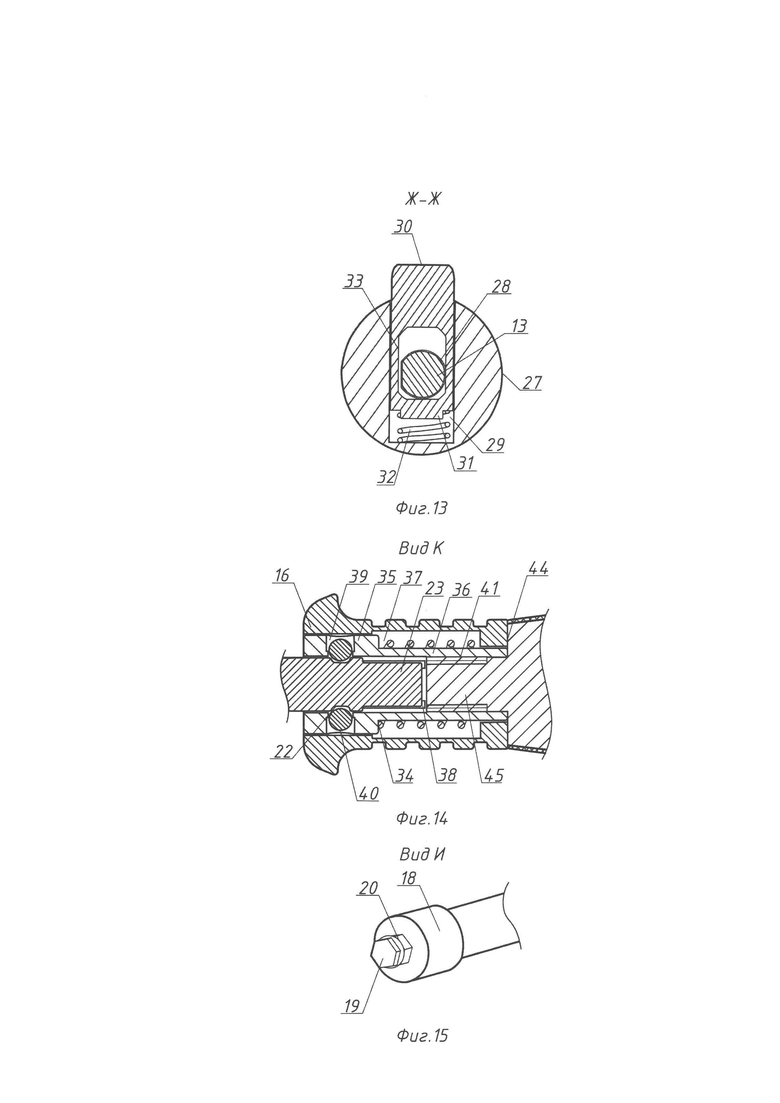
На Фиг. 13 вид фиксатора в разрезе по Ж-Ж.
На Фиг. 14 вид местный К муфты из разреза по Д-Д в увеличенном размере.
На Фиг. 15 вид И на рабочий конец манипулятора спереди на гексагональный выступ с рассеченным стопорным кольцом.
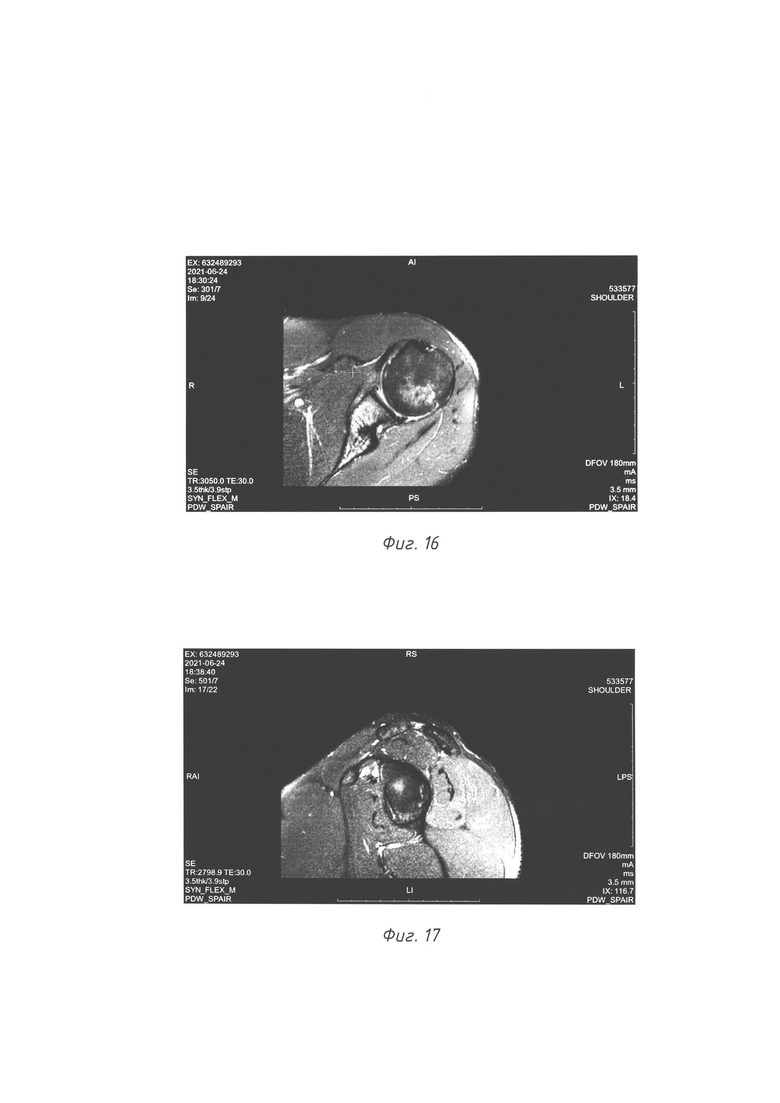
На Фиг. 16 мультиспиральная компьютерная томография (МСКТ) плечевого сустава в аксиальной проекции пациента Ж.
На Фиг. 17 мультиспиральная компьютерная томография (МСКТ) плечевого сустава в сагиттальной проекции пациента Ж.
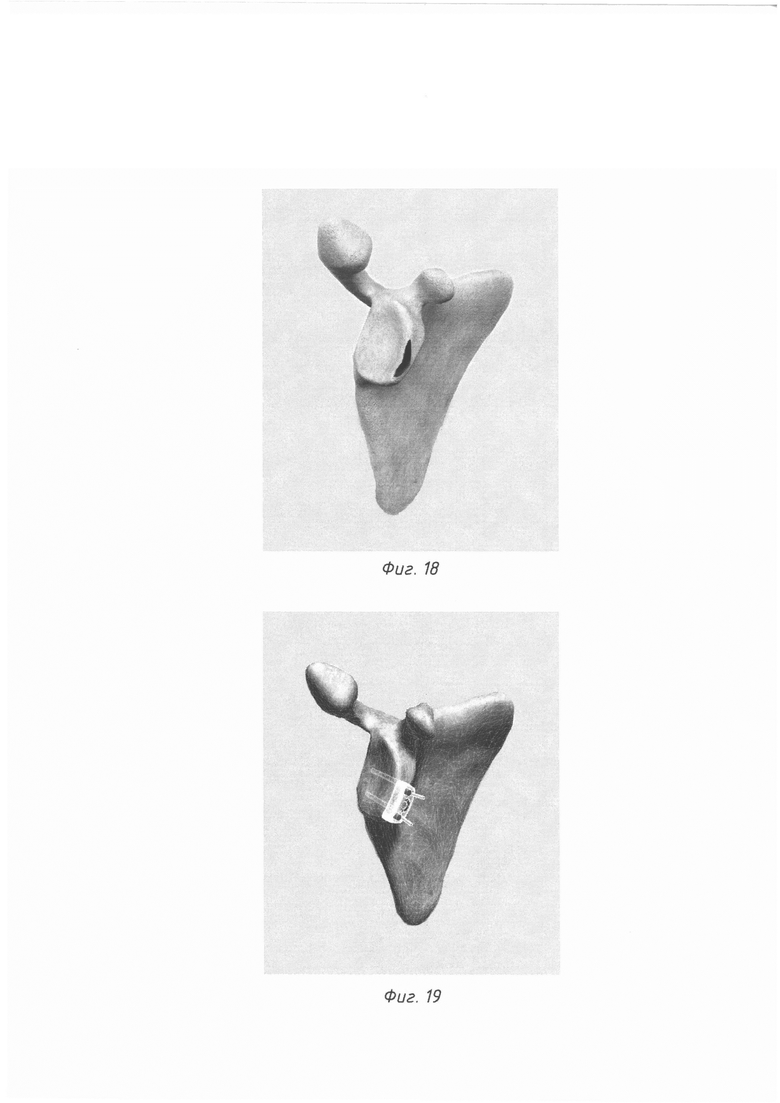
На Фиг. 18 3D-изображение суставной впадины лопатки с реконструкцией дефекта пациент Ж.
На Фиг. 19 3D-изображение суставной впадины лопатки с воссозданием правильной индивидуальной анатомической формы имплантата с позиционированием, заданными направлением и глубиной каналов для винтов пациента Ж.
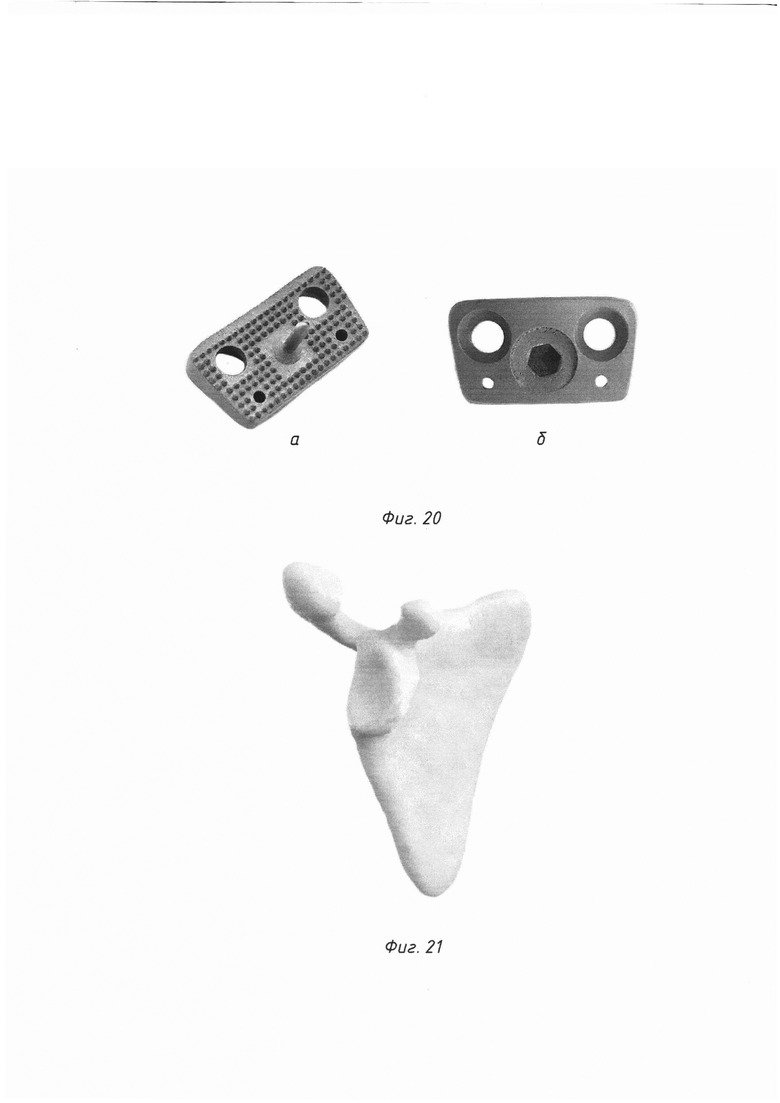
На Фиг. 20а прототип имплантата вид снизу.
На Фиг. 20б прототип имплантата вид сверху.
На Фиг. 21 прототип лопатки с дефектной зоной гленоида пациента Ж.
На Фиг. 22 манипулятор.
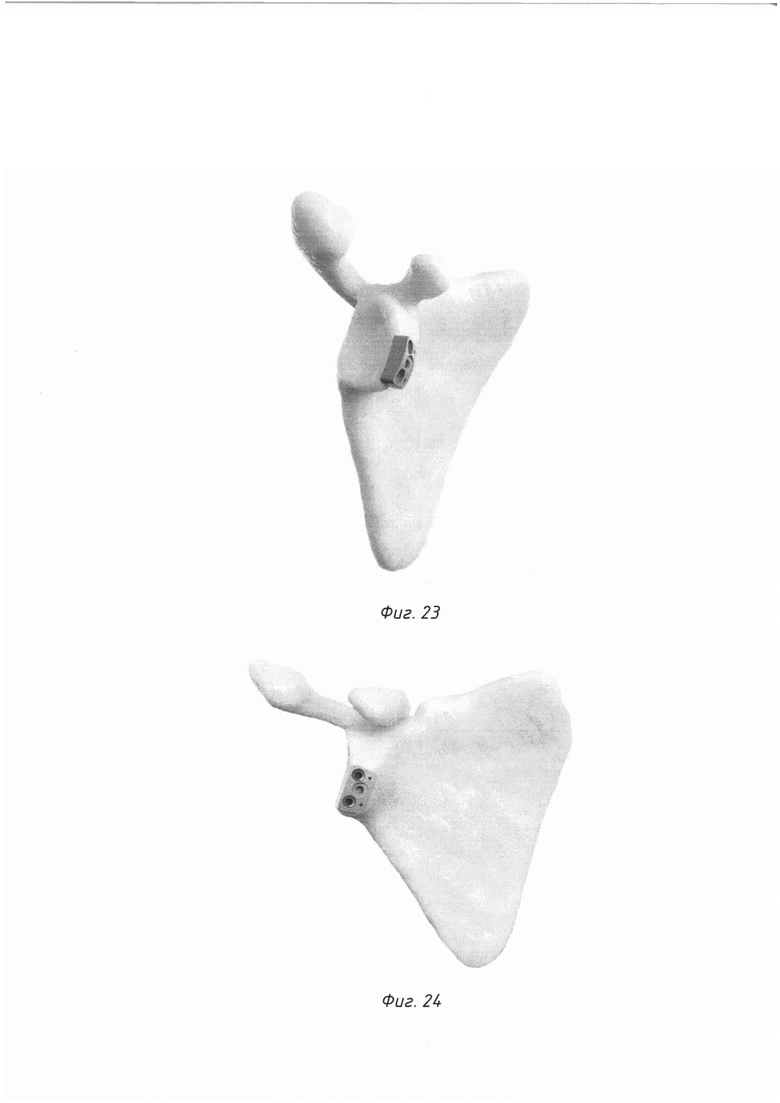
На Фиг. 23 симуляция примерки прототипа имплантата на дефектную зону гленоида прототипа лопатки в прямой проекции пациента Ж.
На Фиг. 24 симуляция примерки прототипа имплантата на дефектную зону гленоида прототипа лопатки в боковой проекции пациента Ж.
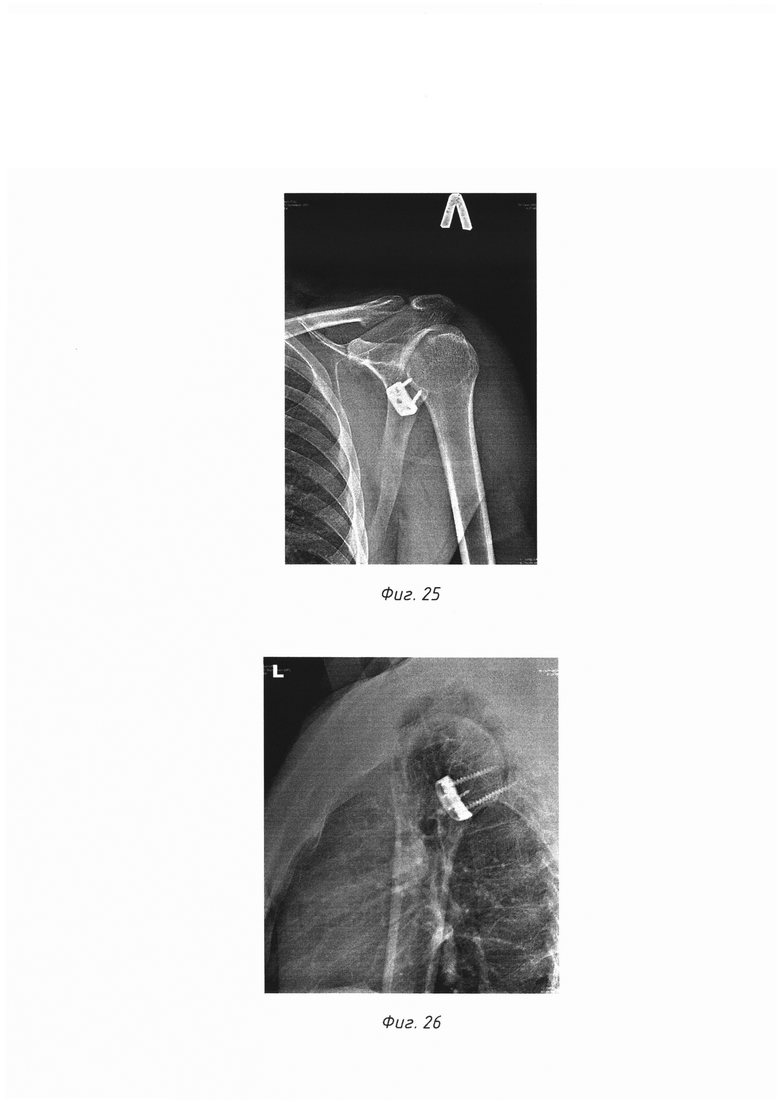
На Фиг. 25 рентгенограмма пациента Ж. суставной впадины лопатки в прямой проекции через три дня после установки имплантата.
На Фиг. 26 рентгенограмма пациента Ж. суставной впадины лопатки в боковой проекции через три дня после установки имплантата.
После установки диагноза с учетом данных магнитно-резонансной томографии (МРТ): результаты МРТ в аксиальной (Фиг. 16) и сагиттальной (Фиг. 17) проекциях - определяют показания для костнопластической стабилизации. На предоперационном этапе выполняют мультиспиральную компьютерную томографию (МСКТ) плечевого сустава для выявления размера костного дефекта суставных поверхностей. Затем данные загружают в программе предоперационного 3D-проектирования и моделирования (например Materialise Mimics). В масштабе 1:1 осуществляют трехмерную реконструкцию лопатки плечевого сустава и образованного дефекта гленоида (Фиг. 18). Далее проектируют анатомическую форму, размеры имплантата, в том числе местоположение, диаметр, глубину и углы наклона осей технологических отверстий в имплантате для фиксирующих винтов и сквозных отверстий для спиц Киршнера, получают изображение прототипа имплантата и производят наложение формы на дефектную зону для получения направления и глубины каналов в кости гленоида для фиксирующих винтов (Фиг. 19). На основе полученных данных при 3D-моделировании в соответствии с размерами дефекта изготавливают прототип имплантата (Фиг. 20) и прототип лопатки с дефектной зоной гленоида (Фиг. 21). Далее при помощи манипулятора (Фиг. 22) проводят симуляцию примерки - наложение прототипа имплантата на прототип лопатки на дефект гленоида в прямой проекции (Фиг. 23) в боковой проекции (Фиг. 24). При совпадении контурных показателей, площади прилегания имплантата к дефекту, и параметров технологических отверстий для винтов и спиц Киршнера, уточняют направление каналов, их глубину и считают работу законченной, при выявлении несовпадений проводят анализ исходных данных и повторяют проектирование до получения требуемого результата.
Полученные при проектировании: местоположение, диаметр, глубина и направление сквозных отверстий имплантата, а также направление и глубина каналов в кости гленоида, зависят от индивидуальных данных пациента, развития его костной системы, размеров гленоида и дефекта. При большом размере гленоида и дефекта, размеры имплантата соответственно увеличиваются, кривизна нижней и верхней стенки значительно увеличивается, что приводит к изменению положения и параметров сквозных отверстий и соответственно направлений каналов.
После проведения симуляции примерки полученную модель загружают в 3D-принтер и методом селективного лазерного сплавления (SLM) изготавливают имплантат из прочного биологически совместимого материала, например из титанового порошка сплава Ti6Al4VELI с отверстиями для фиксирующих винтов, спиц Киршнера и манипулятора.
Поверхность готового имплантата подвергают пескоструйной обработке для начальной зачистки, затем проводят финишную обработку методом электрохимического полирования.
Имплантат для замещения зоны костного дефекта на передней поверхности гленоида лопатки плечевого сустава, выполнен из металла в виде объемной фигуры с отверстиями, форма и размеры которой получены на основании результатов мультиспиральной компьютерной томографии (МСКТ), трехмерная реконструкция лопатки с дефектом гленоида Фиг. 18, Фиг. 19 и результатов симуляции примерки прототипов имплантата Фиг. 20а и Фиг. 20б и прототипа лопатки с дефектной зоной гленоида Фиг. 21. Имплантат имеет форму анатомически изогнутой трапециевидной призмы со сглаженным внешним контуром, Фиг. 1. Изготовлен индивидуально из сверх чистого сплава титан - алюминий - ванадий (Ti6Al4VELI - Extra Low Interstitial) методом селективного лазерного сплавления (Selective Laser Melting) на SLM 3D-принтере по трехмерной модели Фиг. 19, созданной при проектировании анатомической формы имплантата с использованием гибридного параметрического моделирования и топологической оптимизации с учетом параметров костного дефекта гленоида по данным мультиспиральной компьютерной томографии плечевого сустава.
Имплантат имеет нижнюю контактную стенку 1 с конусообразными шипами выгнутую внутрь и верхнюю стенку 2, идущую с наклоном, под углом выгнутую кнаружи Фиг. 1, Фиг. 2, Фиг. 3. Верхняя 1 и нижняя 2 стенки имеют технологические сквозные отверстия с определенными параметрами, установленными при проектировании анатомической формы имплантата. По углам со стороны передней стенки 3 два сквозных отверстия 4 для проведения фиксирующих винтов, изготовленных из титана марки ВТ6 (Ti6Al4V). Сквозные отверстия 4 имеют определенное местоположение, диаметр, глубину и направление полученные при проектировании. Сквозные отверстия 4 имеют конусовидный круговой выступ 5, образующий площадку под головку винта Фиг. 4. По углам со стороны задней стенки 6 два сквозных отверстия 7 для проведения спиц Киршнера имеющих определенное местоположение, диаметр, глубину и направление полученные при проектировании. Фиг. 5. В центре одно глухое отверстие 8 с опорной площадкой 9 и гексагональным углублением 10 для ответной части манипулятора, напротив которого на нижней контактной стенке 1 расположен пин 11 Фиг. 6. Высота передней стенки 3 больше, чем задней 6, боковые стенки 12 направлены навстречу под углом α полученном при проектировании. Фиг. 3, Фиг. 7.
Манипулятор для установки имплантата Фиг. 8 выполнен сборно-разборным, включает стержень 13, на рабочем конце которого выполнен элемент для ответной части имплантата, а на другом находится рукоятка 14, имеет внешнюю часть в виде полой трубки 15.
Стержень 13 соединен с рукояткой 14 и муфтой 16 Фиг 8. Стержень 13 имеет форму цилиндра с участком 17, усеченным плоскостью параллельной его продольной оси, с образованием прямоугольной боковой стенки от цилиндрического элемента 18 с гексагональным выступом 19, имеющим на боковой поверхности круговую проточку с разрезным стопорным кольцом 20, расположенным на торце рабочего конца стержня 13 для взаимодействия с ответной частью имплантата, до цилиндрической части 21 на противоположном конце, в которой выполнена круговая проточка 22 для взаимодействия с шариками муфты 16, за которым следует квадратный четырехгранный конец 23, взаимодействующий с муфтой 16 Фиг. 9, Фиг 10. На стержень 13 нанесены метки 24 глубины для выставления L-образного ограничителя 25, расположенного на полой трубке 15 с рабочего конца имплантата, и метка 26 для удаленного его расположения Фиг. 10.
С противоположной стороны полой трубки 15 находится фиксатор 27 в форме цилиндра L-образного ограничителя 25 с продольным сквозным отверстием 28 для прохождения усеченного участка 17 стержня 13 и с глухим отверстием 29, идущим перпендикулярно стержню 13 Фиг. 10. В фиксаторе 27 находится кнопка 30 с рамкой, имеющей выступ 31 в нижней части, взаимодействующий с пружиной фиксации 32. Рамка кнопки 30 имеет прямоугольное отверстие 33 для свободного движения фиксатора 27 при нажатой кнопке 30 и давлении на пружину фиксации 32 выступом 31 нижней части рамки кнопки 30 Фиг. 13. Остановка фиксатора 27 происходит при отпущенной кнопке 30, когда пружина 32 поднимает кнопку с рамкой 30 и нижняя часть отверстия 33 рамки входит в метки 24 или 26 глубины стержня 13.
Муфта 16 имеет внешний цилиндр с круговыми ребрами на поверхности, упорным кольцом со стороны рабочего конца манипулятора и внутренний цилиндр между которыми установлена возвратная пружина 34 Фиг. 10. Внешний цилиндр установлен с возможностью движения вдоль внутреннего цилиндра, который на первой ступени 35 со стороны рабочего конца инструмента имеет больший внешний диаметр, чем на второй ступени 36 образующий с внешним цилиндром полость 37 под возвратную пружину 34 Фиг. 14. Во внутреннем цилиндре проходит сквозное отверстие, имеющее с рабочего конца участок с сечением в форме квадрата 38, соответствующего по форме квадратному четырехгранному концу стержня. На двух противоположных стенках сквозного отверстия на участке с сечением в форме квадрата 38 напротив друг друга выполнены цилиндрические отверстия 39 с внутренним кольцевым выступом под шарики 40, взаимодействующие с круговой проточкой цилиндрического участка стержня при его установке в муфту. Участок сквозного отверстия с сечением в форме квадрата 38 переходит в цилиндрический участок сквозного отверстия с внутренней резьбой 41 со стороны рукоятки 14, для взаимодействия с ней. Фиг. 14.
Рукоятка 14 имеет центральную цилиндроконическую часть 42, усеченную плоскостями 43 параллельными продольной оси рукоятки сверху и снизу Фиг. 9. Рукоятка 14 имеет торец 44 со стороны рабочей части манипулятора в форме круга с цилиндрическим выступом 45 в центре, имеющим резьбу для соединения с муфтой 16 Фиг. 12. На конце рукоятки 14 находится цилиндрический участок 46, торец которого служит ограничителем и ударной площадкой Фиг. 11. Боковая поверхность цилиндроконической части 42 рукоятки и цилиндрического участка 46 покрыты термостойкой резиной марки Евросил (Eurosil).
Инструмент может быть изготовлен из нержавеющей стали, сплава титана.
Разрезное стопорное кольцо - из нержавеющей стали, шарики - из стали марки ШХ15ГС (100CrMn6).
Сборку манипулятора производят следующим образом.
Фиксатор 27 с L-образным ограничителем 25 выполнены в виде одного блока, с возможностью движения ограничителя 25 вдоль стержня 13 для установки его на нужном уровне. Для соединения стержня 13 с рукояткой 14 служит муфта 16. Для этого захватывают рукой внешний цилиндр с круговыми ребрами на поверхности, упорным кольцом муфты и тянут его в сторону рабочего конца манипулятора, в это время происходит перемещение полости 37 под возвратную пружину 34, что создает дополнительное пространство над отверстиями 39 для перемещения шариков 40 в момент прохождения квадратного четырехгранного конца 23 стержня 13. Шарики 40 установлены на двух противоположных стенках участка сквозного отверстия с сечением в форме квадрата 38 внутри отверстий с внутренним кольцевым выступом 39, который ограничивает их выход в сквозное отверстие 38 муфты 16. При перемещении внешнего цилиндра происходит уменьшение размера полости 37 и сжимание возвратной пружины 34, в момент которого в сквозное отверстие участка с сечением в форме квадрата 38 первой ступени внутреннего цилиндра 35 муфты 16 вставляют квадратный четырехгранный конец 23 стержня 13. Отпускают внешний цилиндр муфты 16 и он возвращается в исходное положение под воздействием возвратной пружины 34, при этом шарики 40 из отверстий 39 под воздействием внешнего цилиндра муфты 16 сдвигаются в обратном направлении и попадают в круговую проточку 22 стержня 13 и фиксируют его. С противоположного конца муфты 16 в цилиндрический участок с внутренней резьбой 41 сквозного отверстия второй ступени 36 внутреннего цилиндра вкручивают цилиндрический выступ 45 рукоятки 14.
Инструмент готов к работе.
Предлагаемый имплантат для замещения зоны костного дефекта на передней поверхности гленоида лопатки плечевого сустава и манипулятор для его установки применяют следующим образом.
Выполняют операцию под общей анестезией в положении пациента «пляжное кресло» дельто-пекторальный доступом. Выделяется апикальная часть клювовидного отростка лопатки в месте прикрепления объединенного сухожилия короткой головки бицепса и клювовидно-плечевой мышц. Сухожильный комплекс прошивается нитями для дальнейшей манипуляции и отсекается от клювовидного отростка.
Следующим шагом визуализируется сухожилие подлопаточной мышцы, которое рассекается продольно в дистальной трети. Выполняется скелетирование и декортикация передней поверхности гленоида для дальнейшей установки имплантата, в диапазоне 4-5 ч. условного циферблата, имплантируется мягкотканый анкерный фиксатор.
При помощи нитей мягкотканых анкерного фиксатора производится тенодез объединенного сухожилия в данной точке.
Манипулятор предварительно стерилизуют и проводят сборку, при условии соосного расположения рукоятки относительно стрежня с L-образным ограничителем, что обеспечит хороший обзор операционной раны при установке имплантата.
Рабочий конец манипулятора, имеющий цилиндрический гексагональным выступ с кольцевой проточкой и с разрезным стопорным кольцом, вводится в центральное отверстие имплантата. При этом плоскость переднего края имплантата должна быть обращена к L-образному ограничителю. Происходит фиксация имплантата на манипуляторе. Далее происходит выставление глубины L-образного ограничителя в зависимости от толщины передней стенки имплантата с учетом длины пина, расположенного на нижней поверхности. По передней поверхности гленоида в зоне дефекта помещается имплантат, фиксированный в манипуляторе. Плоскость передней стенки имплантата должна соответствовать плоскости суставной поверхности гленоида. После упора L-образного ограничителя в край гленоида и поворотов рукоятки манипулятора рукой для выбора верного позиционирования имплантата относительно суставной поверхности происходит его импакция, путем внедрения пина и конусообразных шипов нижней стенки имплантата до плотного контакта нижней поверхностью имплантата с костью, посредством простукивания молотком свободной рукой торца цилиндрического участка конца рукоятки, служащего ограничителем и ударной площадкой.
На этапе фиксации имплантата наличие муфты позволяет быстро снять рукоятку, тем самым освободить рабочие пространство для использования других инструментов, например, направителя сверла и дрели при формировании каналов для фиксирующих винтов и отвертки для проведения винтов.
Далее свободной рукой производится временная фиксация спицей Киршнера через одно из сквозных отверстий в имплантате в заданном этим сквозным отверстием направлении, к которому есть более удобный доступ, для сохранения ротационной стабильности. Для усиления временной фиксации устанавливают вторую спицу, что усиливает стабилизацию при формировании костных каналов для последующей установки винтов.
Затем направитель устанавливают в цилиндрическое отверстие имплантата, которое имеет, полученное направление, заданное при проектировании, и через него формируется сверлом канал в том же направлении под винт на толщину гленоида. В сформированный канал вводится винт из титана, при закручивании которого создается дополнительная компрессия в зоне контакта имплантата с костью. Удаляют спицы Киршнера, после - рабочий конец манипулятора. Далее через направитель формируют следующий канал с задаваемым отверстием имплантата направлением для другого винта через второе отверстие, в канал вводится винт и так же полностью закручивается, для стабилизации.
Форма рукоятки и ее поверхность способствует удобству захвата рукой врача и проведения манипуляций во время операции: позволяет легко присоединить и отсоединить рабочий конец стержня от имплантата, нанести соосные удары для фиксации имплантата пином, вбивая его в поверхность кости.
Выполняется контроль гемостаза. Рана ушивается послойно. Устанавливается дренаж-трубка через контрапертуру. Накладываются внутрикожные швы. Конечность фиксируется мягкой повязкой по типу Дезо с последующей заменой на ортез.
При данном способе происходит замещение дефекта суставной поверхности лопатки имплантатом и, путем транспозиции объединенного сухожилия, формируется мягкотканый «гамак» как и при операции Латарже.
Замещение костного дефекта передней поверхности гленоида производят у пациентов с хронической нестабильностью плечевого сустава, когда в результате многократных вывихов головки плеча происходит формирование дефицита площади суставной поверхности гленоида.
Клинический пример.
Пациент Ж. 27 лет, поступил в отделение травматологии и ортопедии с жалобами на хроническую нестабильность левого плечевого сустава. Впервые вывих произошел около пяти лет назад во время боксерского спарринга - нанесение прямого удара противнику. Вправление вывиха выполнено в медицинском учреждении. В течение последних двух лет стал отмечать многократные вывихи под действием бытовых нагрузок, вывихи вправлял самостоятельно. У пациента имеется синдром гипермобильности - положительные критерии Бейтона. Пациенту было назначено МРТ.
Диагноз с учетом данных МРТ: хроническая нестабильность левого плечевого сустава. Дефект Хилл-Сакса головки левого плеча. Синдром гипермобильности. Для определения тактики использовалась шкала оценки индекса нестабильности плечевого сустава (ISISscore).
На этапе предоперационной планирования по результатам МСКТ выполнены 3D-реконструкция суставной поверхности плечевого сустава с визуализацией дефекта Фиг. 18. В соответствии с размерами дефекта гленоида спроектирована 3D-модель прототипа имплантата с заданными параметрами Фиг. 20 а и Фиг. 20 б, установленными при проектировании анатомической формы имплантата, включающими местоположение, диаметр, глубину и углы наклона осей сквозных отверстий для фиксирующих винтов и спиц Фиг. 19. Спроектирован прототип лопатки с дефектной зоной гленоида пациента Ж. с Фиг. 21. Готовые модели напечатаны. Далее при помощи манипулятора Фиг. 22 выполнена симуляция примерки прототипа имплантата в зону дефекта гленоида Фиг. 23, Фиг. 24, определено направление и глубина для каналов под винты, подбор длины и диаметров фиксирующих винтов и диаметра и длины спиц. По положительному итогу результата примерки, в течение двух рабочих дней изготовлен имплантат со следующими размерами:
Длина передней стенки 23,79 мм, длина задней стенки 20,65 мм, длина боковых стенок 13,02 мм, толщина передней стенки 7,96 мм, толщина задней стенки 4,08 мм.
Первое отверстие для винта: ось отверстия расположена на расстоянии 4,36 мм от левой боковой стенки и на расстоянии 4,38 мм от передней стенки, глубина отверстия 6,24 мм, диаметр отверстия под головку винта 6,50 мм, диаметр отверстий под направитель и ножку винта 4,00 мм. Канал первого отверстия для винта: диаметр 3,00 мм, глубина 32,50 мм.
Второе отверстие для винта: ось отверстия расположена на расстоянии 4,42 мм от правой боковой стенки и на расстоянии 4,49 мм от передней стенки, глубина отверстия 6,20 мм, диаметр отверстия под головку винта 6,50 мм, диаметр отверстий под направитель и ножку винта 4,00 мм. Канал второго отверстия для винта: диаметр 3,00 мм, глубина 34,50 мм.
Третье отверстие для спицы Киршнера: ось отверстия расположена на расстоянии 3,61 мм от левой боковой стенки и на расстоянии 2,71 мм от задней стенки, глубина отверстия 4,48 мм, диаметр отверстия 1,50 мм.
Четвертое отверстие для спицы Киршнера: ось отверстия расположена на расстоянии 3,72 мм от правой боковой стенки и на расстоянии 2,68 мм от задней стенки, глубина отверстия глубина отверстия 4,48 мм, диаметр отверстия 1,50 мм.
Винт для первого отверстия: диаметр 3,50 мм, длина 32,00 мм, винт для второго отверстия: диаметр 3,50 мм, длина 34,00 мм и спицы Киршнера диаметром 1,20 мм длинной 150,00 мм для третьего и четвертого отверстий.
На основании предложенного способа и предоперационного планирования пациенту проведена имплантация в сочетании с транспозицией объединенного сухожилия и фиксацией мягкотканым якорным фиксатором.
Лечение проводили с использованием индивидуального имплантата установленного с помощью манипулятора, путем выполнения оперативного вмешательства для замещения зоны костного дефекта на передней поверхности гленоида лопатки левого плечевого сустава.
В результате детальной предоперационной подготовки, точных контурных показателей анатомической формы, симуляции примерки и использования манипулятора для установки и заранее известные направления каналов введения и размеров винтов упростили выполнение установки имплантата, его удержание, введение и фиксацию, обеспечили точное позиционирование имплантата и сократили время операции на 30 мин.
На третьи сутки после операции выполнена контрольная рентгенография левого плечевого сустава в двух проекциях Фиг. 25, Фиг. 26: по передней поверхности гленоида лопатки определяется имплантат, фиксированный двумя винтами. Положение имплантата верное. Суставные поверхности конгруэнтны. В послеоперационном периоде выполнена иммобилизация правой верхней конечности бандажом плечевого пояса по типу повязки Дезо. Этапный контрольный осмотр через один месяц.
При контрольном осмотре через один месяц объем движений в плечевом суставе - полный. Болевой синдром отсутствует. По результату контрольной спиральной компьютерной томографии (СКТ): имплантат фиксирован по передней поверхности гленоида в нижнем сегменте. Признаков миграции имплантата нет. Суставные поверхности конгруэнтны.
Предложенный способ обладает следующими преимуществами: предоперационное планирование позволяет точно изготовить имплантат соответственно размерам дефекта гленоида и учитывает антропометрические особенности гленоида. Форма имплантата и особенности его поверхности позволяет достичь максимального контакта в зоне «имплантат-кость». Отсутствует риск лизиса, т.к. имплантат выполнен из прочного материала. Практически отсутствует риск интраоперационных осложнений в виде раскалывания костного трансплантата при проведении винтов. Отсутствует необходимость формирования «донорской зоны» для забора костного аутотрансплантата, что сокращает время и травматичность операции. Способ восстановления дефекта суставной поверхности гленоида при хронической нестабильности плечевого сустава осуществляется с использованием современных технологий и материалов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Комплект металлического имплантата со вспомогательными полимерными изделиями для хирургического лечения тяжелых травм и последствий травм плечевого сустава с травматической потерей костной массы гленоида с использованием реверсивного тотального протезирования | 2021 |
|
RU2769746C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ДЕФЕКТА ПЕРЕДНЕГО КРАЯ СУСТАВНОЙ ВПАДИНЫ ЛОПАТКИ ПРИ ХРОНИЧЕСКОЙ РЕЦИДИВИРУЮЩЕЙ ПЕРЕДНЕЙ НЕСТАБИЛЬНОСТИ ПЛЕЧЕВОГО СУСТАВА | 2014 |
|
RU2573803C1 |
| Способ хирургического лечения костных дефектов гленоидального отростка лопатки при реверсивном эндопротезировании плечевого сустава | 2023 |
|
RU2824270C1 |
| Способ хирургического лечения артроза плечевого сустава с установкой метаглена реверсивного эндопротеза | 2023 |
|
RU2816448C1 |
| ИНДИВИДУАЛЬНЫЙ 3D-ИМПЛАНТАТ ДЛЯ ЗАМЕНЫ ПЛЕЧЕВОГО СУСТАВА ПРИ ДЕФЕКТАХ ЛОПАТКИ И СПОСОБ ЭНДОПРОТЕЗИРОВАНИЯ ПЛЕЧЕВОГО СУСТАВА ПРИ ДЕФЕКТАХ ЛОПАТКИ | 2022 |
|
RU2787706C2 |
| Способ артроскопической аутопластики значительного костного дефекта гленоида при хронической передней нестабильности плеча с применением технологии 3D-печати | 2023 |
|
RU2818061C1 |
| Способ хирургического лечения артроза плечевого сустава с потерей костной массы гленоида | 2020 |
|
RU2746525C1 |
| СПОСОБ ПРОФИЛАКТИКИ ЗАДНЕГО ВЫВИХА ПЛЕЧА | 2022 |
|
RU2777229C1 |
| СПОСОБ ОПЕРАТИВНОГО ЛЕЧЕНИЯ ЗАСТАРЕЛОГО ЗАДНЕГО ВЫВИХА ПЛЕЧА | 2011 |
|
RU2481798C2 |
| Способ хирургического лечения артроза плечевого сустава с установкой индивидуального титанового аугмента | 2024 |
|
RU2827999C1 |

Группа изобретений относится к травматологии и ортопедии и может использоваться для стабилизации плечевого сустава при его хронической нестабильности. Имплантат для замещения зоны костного дефекта на передней поверхности гленоида лопатки плечевого сустава имеет форму анатомически изогнутой трапециевидной призмы со сглаженным внешним контуром и изготовлен индивидуально из сверх чистого сплава титан - алюминий - ванадий (Ti6Al4VELI) методом селективного лазерного сплавления на SLM 3D-принтере по трехмерной модели. Трехмерная модель создана при проектировании анатомической формы имплантата с использованием гибридного параметрического моделирования и топологической оптимизации с учетом параметров костного дефекта гленоида по данным мультиспиральной компьютерной томографии плечевого сустава. Имплант имеет нижнюю контактную стенку с конусообразными шипами, выгнутую внутрь и верхнюю стенку, идущую с наклоном, под углом выгнутую кнаружи. Верхняя и нижняя стенки имеют технологические отверстия с определенными местоположением, диаметром, глубиной и направлением полученными при проектировании для установки фиксирующих винтов и спиц Киршнера, в каналы с задаваемым отверстием имплантата направлением и глубиной проведения в кости гленоида. В центре одно глухое отверстие с опорной площадкой и гексагональным углублением для ответной части манипулятора, напротив которого на нижней контактной стенке расположен пин, высота передней стенки больше, чем задней, боковые стенки направлены навстречу под углом α, полученным при проектировании. Манипулятор для установки имплантата включает стержень в форме цилиндра с участком, усеченным плоскостью параллельной его продольной оси, с образованием прямоугольной боковой стенки. На рабочем конце стержень имеет гексагональный выступ, с разрезным стопорным кольцом, установленным в круговую проточку, для взаимодействия с ответной частью имплантата. Противоположный квадратный четырехгранный конец взаимодействует с муфтой. Стержень вставлен в трубку, на которой установлен L-образный ограничитель с фиксатором стержня в форме цилиндра. Муфта имеет внешний цилиндр, установленный с возможностью движения вдоль внутреннего двухступенчатого цилиндра, посредством которого соединяется квадратный четырехгранный конец стержня с цилиндрическим выступом в центре рукоятки. Рукоятка имеет центральную цилиндроконическую часть, усеченную плоскостями параллельными продольной оси рукоятки сверху и снизу. На конце рукоятки находится цилиндрический участок, торец которого служит ограничителем и ударной площадкой. Имплантат и манипулятор позволяют надежно и стабильно закрепить имплантат на манипуляторе при позиционировании имплантата в пространстве во всех направлениях и не ограничивать визуальный контроль в узком пространстве операционного поля, включающем мышцы и сухожильный комплекс, сократить время на проведение операции и упростить ее в целом. 2 н.п. ф-лы, 1 пр., 26 ил.
1. Имплантат для замещения зоны костного дефекта на передней поверхности гленоида лопатки плечевого сустава выполнен из металла в виде объемной фигуры с отверстиями под винты и спицы, форма и размеры которой получены на основании выполнения мультиспиральной компьютерной томографии и трехмерной реконструкции на стороне дефекта, отличающийся тем, что имеет форму анатомически изогнутой трапециевидной призмы со сглаженным внешним контуром, изготовлен индивидуально из сверх чистого сплава титан - алюминий - ванадий (Ti6Al4VELI) методом селективного лазерного сплавления на SLM 3D-принтере по трехмерной модели, созданной при проектировании анатомической формы имплантата с использованием гибридного параметрического моделирования и топологической оптимизации с учетом параметров костного дефекта гленоида по данным мультиспиральной компьютерной томографии плечевого сустава, имеет нижнюю контактную стенку с конусообразными шипами, выгнутую внутрь и верхнюю стенку, идущую с наклоном, под углом, выгнутую кнаружи, верхняя и нижняя стенки имеют технологические отверстия с определенными местоположением, диаметром, глубиной и направлением, полученными при проектировании: по углам со стороны передней стенки два сквозных отверстия для установки фиксирующих винтов с конусовидным круговым выступом, образующим площадку под головку винта, в каналы с задаваемым отверстием имплантата направлением и глубиной проведения в кости гленоида; по углам со стороны задней стенки два сквозных отверстия для установки спиц Киршнера в задаваемом отверстием имплантата направлении; в центре одно глухое отверстие с опорной площадкой и гексагональным углублением для ответной части манипулятора, напротив которого на нижней контактной стенке расположен пин, высота передней стенки больше, чем задней, боковые стенки направлены навстречу под углом α полученным при проектировании.
2. Манипулятор для установки имплантата по п. 1 выполнен сборно-разборным, включает стержень, на рабочем конце которого выполнен элемент для ответной части имплантата, а на другом находится рукоятка, имеет внешнюю часть в виде полой трубки, на рабочем конце выполнены метки глубины, отличающийся тем, что стержень соединен с рукояткой муфтой, стержень имеет форму цилиндра с участком, усеченным плоскостью параллельной его продольной оси, с образованием прямоугольной боковой стенки от цилиндрического элемента с гексагональным выступом, имеющим на боковой поверхности круговую проточку с разрезным стопорным кольцом, расположенным на торце рабочего конца стержня для взаимодействия с ответной частью имплантата, до цилиндрической части на противоположном конце, в которой выполнена круговая проточка, за которой следует квадратный четырехгранный конец, взаимодействующий с муфтой, на стержень нанесены метки глубины для выставления L-образного ограничителя, расположенного на полой трубке с рабочего конца имплантата, и метка для его удаленного расположения, с противоположной стороны полой трубки находится фиксатор в форме цилиндра L-образного ограничителя с продольным сквозным отверстием для прохождения усеченного участка стержня и с глухим отверстием, идущим перпендикулярно стержню, в котором находится кнопка с рамкой, имеющей выступ в нижней части, взаимодействующий с пружиной фиксации, рамка имеет прямоугольное отверстие для свободного движения фиксатора при нажатой кнопке и давлении на пружину выступом нижней части рамки и остановки фиксатора при отпущенной кнопке, когда пружина поднимает кнопку с рамкой и нижняя часть отверстия рамки входит в метку глубины стержня, муфта имеет внешний цилиндр с круговыми ребрами на поверхности, упорным кольцом со стороны рабочего конца манипулятора и внутренний цилиндр, между которыми установлена возвратная пружина, внешний цилиндр установлен с возможностью движения вдоль внутреннего цилиндра, который на первой ступени со стороны рабочего конца инструмента имеет больший внешний диаметр, чем на второй ступени, образующий с внешним цилиндром полость под возвратную пружину, во внутреннем цилиндре проходит сквозное отверстие, имеющее с рабочего конца участок с сечением в форме квадрата, соответствующего по форме квадратному четырехгранному концу стержня, на двух противоположных стенках которого напротив друг друга выполнены цилиндрические отверстия с внутренним кольцевым выступом под шарики, взаимодействующие с круговой проточкой цилиндрического участка стержня при его установке в муфту, участок сквозного отверстия с сечением в форме квадрата переходит в цилиндрический участок сквозного отверстия с внутренней резьбой со стороны рукоятки, для взаимодействия с ней; рукоятка имеет центральную цилиндроконическую часть, усеченную плоскостями параллельными продольной оси рукоятки сверху и снизу, с торцом со стороны рабочей части манипулятора в форме круга с цилиндрическим выступом в центре, имеющим резьбу для соединения с муфтой, на конце рукоятки находится цилиндрический участок, торец которого служит ограничителем и ударной площадкой, боковая поверхность цилиндроконической части рукоятки и цилиндрического участка покрыты термостойкой резиной.
| ПРИСПОСОБЛЕНИЕ ДЛЯ ПРЕДОТВРАЩЕНИЯ ОБРАТНОГО | 0 |
|
SU193969A1 |
| ИМПЛАНТАТ ДЛЯ ПЛАСТИКИ КОСТНЫХ ДЕФЕКТОВ ОПОРНЫХ ПОВЕРХНОСТЕЙ СУСТАВОВ | 2002 |
|
RU2220682C2 |
| 0 |
|
SU157823A1 | |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| US 3835849 А, 17.09.1974. | |||

