Данное изобретение относится к области радиолокации, в частности к мобильным береговым радиолокационным станциям и может использоваться для обнаружения, сопровождения, целераспределение и выдачи целеуказания (дальность и пеленг) по надводным и воздушным объектам, в том числе малоразмерным высокоскоростным, в пределах прямой видимости и за радиогоризонтом в условиях волноводного распространения радиоволн.
Наиболее близким к заявленному техническому решению является Подвижный пункт целеуказания и управления (Акционерное общество «Научно-производственное предприятие «Калужский приборостроительный завод «Тайфун», RU №2480705 С2, дата приоритета 01.12.2010, номер МПК F41H 13/00 В60Р 3/14). Подвижный пункт целеуказания и управления, представляющий собой мобильную РЛС, имеет следующие недостатки в сравнении с нашим заявленным техническим решением:
- отсутствие в составе Подвижного пункта целеуказания и управления устройств и приборов, определяющих высоту волновода испарения, для использования эффекта распространения радиоволн Х-диапазона частот в волноводе испарения;
- отсутствие в составе Подвижного пункта целеуказания и управления механизмов, позволяющих перестраивать антенный модуль на оптимальную высоту при работе в волноводе испарения;
- в Подвижном пункте целеуказания и управления применяются сигналы с импульсной линейной частотной модуляцией (далее - ЛЧМ-сигналы), а в Мобильной береговой радиолокационной станция загоризонтного обнаружения с повышенной скрытностью излучения (МБРЛС ЗГО ПСИ) - амплитудно-фазоманипулированные сигналы с псевдослучайным законом изменения амплитуды и фазы в квазинепрерывном режиме излучения и приема, что обеспечивает:
- однозначное измерение дальности (в РЛС с ЛЧМ-сигналами неоднозначность измерения дальности с задержками, превышающими период повторения импульсов («запериодники») и радиальной составляющей скорости цели (в РЛС с ЛЧМ-сигналами систематическая ошибка «радиальная составляющая скорости - дальность»);
- малую «слепую зону» (десятки метров) (в РЛС с ЛЧМ-сигналами - минимальная дальность определяется длительностью импульса, для обеспечения высокого энергетического потенциала необходимо ее увеличивать, тем самым увеличивая и «слепую зону»);
- высокую помехозащищенность и помехоустойчивость (в РЛС с ЛЧМ-сигналами используются регулярные сигналы, что обеспечивает возможность средствам радиоэлектронной борьбы измерять параметры сигнала и синтезировать импульсы, имитирующие цели/помехи с требуемыми параметрами);
- Подвижный пункт целеуказания и управления имеет меньше скрытность излучения. Подвижному пункту целеуказания и управления в ЛЧМ-сигналами для обеспечения требуемого энергопотенциала для обнаружения «слабых» целей за пределами радиогоризонта требуется увеличивать либо длительность излучаемого импульса, либо его мощность, что с учетом регулярного характера сигнала повышает вероятность его обнаружения, а в МБРЛС ЗГО ПСИ высокий энергопотенциал достигается за счет применения шумоподобных сигналов, обеспечивающих максимальное использование длительности и ширины полосы спектра и, как следствие, возможность излучения с меньшей мощностью и меньшей вероятностью обнаружения.
Задачей, на решение которой направлено заявляемое изобретение, является обнаружение надводных и низколетящих целей за радиогоризонтом РЛС с повышенной скрытностью излучения, высокой помехозащищенностью и малой «слепой зоной» (десятки метров) при решении задач обнаружения целей с однозначным определением дальности и скорости «на проходе» (за один цикл зондирования) и выдачей признака движения цели.
Для решения поставленной задачи в МБРЛС ЗГО ПСИ, установленной на высокопроходимое подвижное колесное шасси, для увеличения дальности обнаружения целей при использовании эффекта распространения радиоволн Х-диапазона частот в волноводе испарения происходит определение собственным комплексом средств измерения и обработки метеоданных высоты волновода испарения, под которую осуществляется подстройка высоты высокочастотного (антенного) модуля с помощью подъемного устройства под оптимальную высоту для скрытного наблюдения за всей акваторией, в том числе и за радиогоризонт, за счет применения широкополосных сложных зондирующих шумоподобных квазинепрерывных сигналов с большой базой с высокой помехозащищенностью и малой «слепой зоной» (десятки метров) при решении задач обнаружения целей с однозначным определением дальности и скорости «на проходе» (за один цикл зондирования) и выдачей признака движения цели.
Техническим результатом, обеспечиваемым приведенной совокупностью признаков, является применение принципов распространения радиоволн в волноводах испарения, которые постоянно появляются над обширными водными поверхностями, где основным процессом, способствующим их образованию, является испарение. Основной характеристикой РЛС, значительно влияющей на распространение радиоволн в волноводе испарения, является частота зондирующего сигнала. Использование волновода испарения возможно для дециметровых, сантиметровых и миллиметровых радиоволн и заключается в рефрагировании радиоволны в сторону земли с последующим переотражением от морской поверхности. Таким образом возникает эффект волноводного распространения с крайне малыми потерями (от 3 дБ на 100 км). В МБРЛС ЗГО ПСИ для оптимального возбуждения волновода испарения используется сантиметровый диапазон частот (X-диапазон), который в результате расчетов, моделирования и натурных испытаний показал наиболее высокие результаты.
Очень важным для оптимального возбуждения волновода испарения параметром РЛС, заложенным конструктивно, является диаграмма направленности антенны и положение ее главного лепестка. В ходе моделирования и натурных испытания МБРЛС ЗГО ПСИ было установлено, что оптимальные условия возбуждения волновода испарения наблюдаются при направлении главного лепестка диаграммы направленности параллельно поверхности акватории.
При проектировании МБРЛС ЗГО ПСИ важным фактором является высота подъема высокочастотного (антенного) модуля над отражающей поверхностью. С целью нахождения оптимальных значений высоты подъема высокочастотного (антенного) модуля были проведены моделирование и натурные испытания, которые выявили, что максимальная дальность обнаружения наблюдается на интервале высот, соответствующих трети высоты волновода. В силу большой вариативности волновода испарения как по интенсивности, так по высоте в МБРЛС ЗГО ПСИ спроектировано подъемное устройство, которое способно подстраивать высоту высокочастотного (антенного) модуля до оптимальной высоты - до трети высоты от ожидаемого волновода испарения. Высота подъема высокочастотного (антенного) модуля МБРЛС ЗГО ПСИ варьируется от 1 до 10 м от уровня земли.
Для определения высоты волновода испарения в точке работы МБРЛС ЗГО ПСИ в ее состав входит комплекс средств измерения и обработки метеоданных, состоящий из цифровой метеостанции с датчиками сбора метеопараметров атмосферы (температуры, влажности, давления воздуха, направления и скорости ветра), расположенными вертикально на высотах до 15 метров от уровня моря (через каждый метр), и программное обеспечение. Оценив высоту волновода испарения, комплекс средств измерения и обработки метеоданных выдает оператору МБРЛС ЗГО ПСИ рекомендуемую высоту подъема высокочастотного (антенного) модуля.
Основу для построения МБРЛС ЗГО ПСИ составляет фазированная антенная решетка, способная быстро и с высокой точностью изменять положение лучей в пространстве, и высокопроизводительная и гибкая цифровая система обработки сигналов и управления, реализованная с помощью специализированных цифровых устройств. Возможность изменения положение лучей в пространстве не требует горизонтирования МБРЛС ЗГО ПСИ в месте установки. Реализация указанных принципов связана с применением твердотельной элементной базы, позволяющей резко повысить эксплуатационные характеристики: надежность, минимальные массу и габариты, сниженные требования к обеспечению энергопитанием. Переход на транзисторные усилители мощности в передатчиках и применение широкополосных шумоподобных сложных зондирующих сигналов существенно повышают скрытность излучения.
В МБРЛС ЗГО ПСИ предусмотрены возможности адаптации к конкретной тактической обстановке, выбор оптимального режима работы (вид зондирующего сигнала, способ сканирования луча антенны, способ обработки сигналов). Малая мощностью излучения (не более 50 Вт) и применение широкополосных сложных шумоподобных квазинепрерывных зондирующих сигналов с большой базой до 1000000 (LPI-сигналы -сигналы с низкой вероятностью перехвата) позволяют вести скрытное круглосуточное наблюдение за всей акваторией.
Реализованный в МБРЛС ЗГО ПСИ квазинепрерывный режим работы обеспечивает ускоренное решение задач обнаружения целей с однозначным определением дальности и скорости «на проходе» (за один цикл зондирования) и выдачу признака движения цели, что особенно важно в условиях вероятностного характера волновода испарения. Для этих же целей в МБРЛС ЗГО ПСИ используется единый режим для решения задач обнаружения во всем диапазоне дальностей и доплеровских сдвигов частоты целей. Применяемый в качестве зондирующего шумоподобный квазинепрерывный сигнал в виду его непериодичности обеспечивает высокую помехозащищенность МБРЛС ЗГО ПСИ и предельно малую величину «слепой зоны» (десятки метров).
В МБРЛС ЗГО ПСИ интегрированы функции автоматического обмена информацией с однотипными РЛС и командными пунктами с помощью средств связи и передачи данных, позволяющие реализовать единое информационное пространство.
Для возможности установки МБРЛС ЗГО ПСИ у уреза воды, станция располагается на высокопроходимом подвижном шасси. В состав МБРЛС ЗГО ПСИ включены системы определения собственного местоположения как спутниковые, так и инерциальные. МБРЛС ЗГО ПСИ оснащена собственными системами электропитания и жизнеобеспечения.
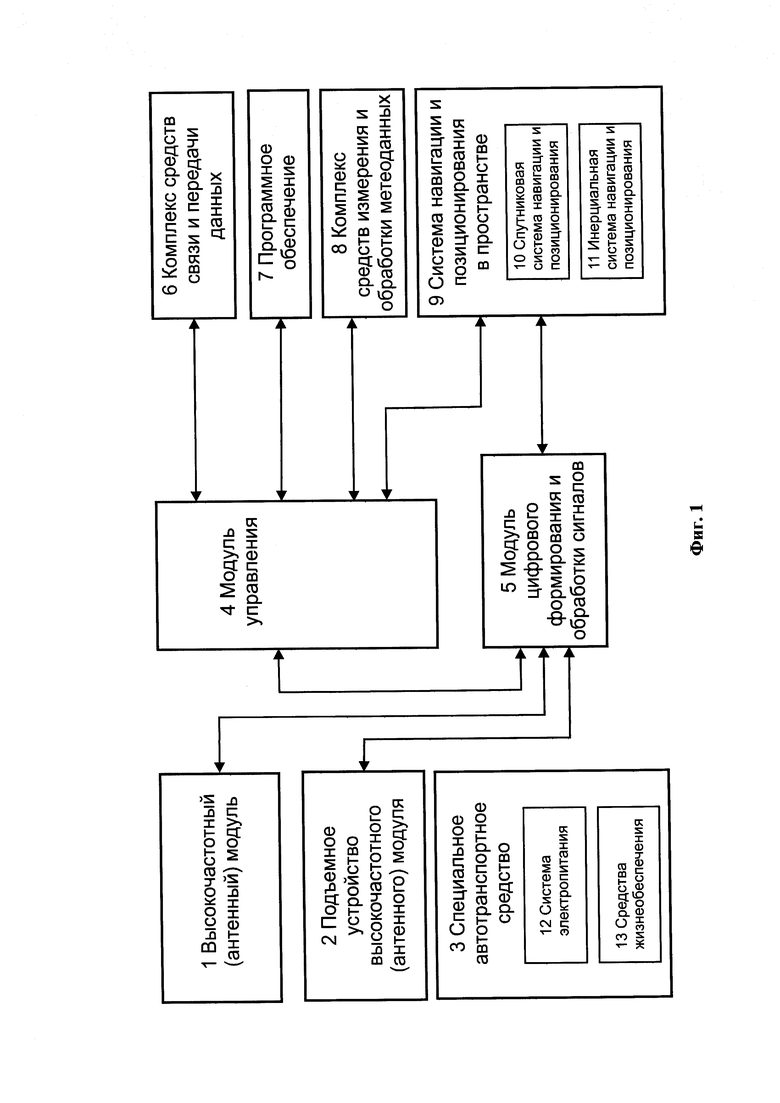
Структурная схема МБРЛС ЗГО ПСИ поясняется чертежом (Фиг. 1).
Сущность изобретения состоит в том, что мобильная береговая радиолокационная станция, используя свой носитель - специальное автотранспортное средство (3) (высокопроходимое подвижное колесное шасси), подъезжает к береговой черте в районе применения. Разворачивается на вышке, которая входит в состав специального автотранспортного средства (3), собственный комплекс средств измерения и обработки метеоданных (8), с помощью которого определяется высота волновода испарения. Данные о высоте волновода испарения передаются в модуль управления (4), оператор которого задает рекомендуемую комплексом средств измерения и обработки метеоданных (8) высоту высокочастотного (антенного) модуля (1). Подъемное устройство высокочастотного (антенного) модуля (2) перемещает высокочастотный (антенный) модуль (1) на заданную оператором модуля управления (4) высоту. Высокочастотный (антенный) модуль (1) перемещается в 1/3 высоты волновода испарения на подъемном устройстве высокочастотного (антенного) модуля (2). Далее высокочастотный (антенный) модуль (1) с высокой скрытностью зондирует пространство широкополосными сложными шумоподобными квазинепрерывными зондирующими сигналами с большой базой при малой средней мощности излучения (не более 50 Вт). Для формирования и обработки этих сигналов используется модуль цифрового формирования и обработки сигналов (5), который обеспечивает формирование зондирующих сигналов на промежуточной частоте, прием и обработку сигналов на промежуточной частоте в реальном времени, формирование сигналов управления и синхронизации узлов и блоков МБРЛС ЗГО ПСИ. После обработки принятых сигналов программным обеспечением (7) оператор модуля управления (4) выдает с помощью комплекса средств связи и передачи данных (6) пользователям данные об обнаруженных, в том числе и за радиогоризонтом, целях. Для выдачи целеуказания необходимо знать точное местоположение МБРЛС ЗГО ПСИ и центральный пеленг (азимут) высокочастотного (антенного) модуля (1). Для этого в состав МБРЛС ЗГО ПСИ входит система навигации и позиционирования в пространстве (9), состоящая из спутниковой системы навигации и позиционирования (10) и инерциальной системы навигации и позиционирования (11). Оператор модуля управления (4) после обработки всех данных программным обеспечением (7) обеспечивает целераспределение и выдает целеуказание потребителям информации с помощью комплекса средств связи и передачи данных (6). МБРЛС ЗГО ПСИ функционирует автономно: в ее составе на специальном автотранспортном средстве (3) смонтирована система электропитания (12), обеспечивающая функционирование составных частей от различных номиналов электропитания постоянного и переменного тока, а также средства жизнеобеспечения (13).
Применение МБРЛС ЗГО ПСИ позволит поднять на качественно новый уровень береговые РЛС Российской Федерации. МБРЛС ЗГО ПСИ позволит ударным средствам поражения, имеющим на вооружении ракетное оружие с дальностью действия около 400 км, решить проблемы обнаружения и предварительного целеуказания по надводным целям на таких дальностях. При этом применение комплексного подхода с использованием низкоэнергетических МБРЛС ЗГО ПСИ с высокой скрытностью излучения и максимальным использованием природного явления волноводного распространения радиоволн на большие расстояния позволит перекрывать большие морские и океанские акватории меньшими средствами. Наличие в составе МБРЛС ЗГО ПСИ специального автотранспортного средства (высокопроходимое подвижное колесное шасси) с системой электропитания и средствами жизнеобеспечения, а также системы навигации и позиционирования в пространстве позволяет перемещать и устанавливать изделие в любом месте побережья без предварительной подготовки позиций.
Существующие в настоящее время береговые РЛС Российской Федерации, состоящие на вооружении, активный канал которых решает аналогичные задачи, не имеют возможности адаптироваться к текущему состоянию приповерхностной тропосферы, оказывающей существенное влияние на тактические характеристики РЛС.
МБРЛС ЗГО ПСИ имеет возможность одновременной работы по всей зоне обзора, начиная от окончания «слепой зоны» (десятки метров) до полной дальности 500 км и более.
Используемая элементная база позволяет создавать за меньшую стоимость мобильные береговые РЛС загоризонтного обнаружения, чем уже имеющиеся сейчас на вооружении загоризонтные РЛС, например, загоризонтная РЛС поверхностной волны «Подсолнух-Э» (ОАО «НПК «Научно-исследовательский институт дальней радиосвязи») (www.niidar.ru/biznes/radiotekhnicheskie-sistemy/podsolnukh/). При этом нет необходимости занимать обширные береговые территории и привлекать для эксплуатации большое количество личного состава.
В состав МБРЛС ЗГО ПСИ входит специальное автотранспортное средство (высокопроходимое подвижное колесное шасси), которое позволяет постоянно менять дислокацию изделия, что существенно уменьшает возможность идентификации ее местоположения противником, и, экономя средства потребителя, разворачиваться там, где это необходимо в настоящее время.
Малая мощность излучения МБРЛС ЗГО ПСИ не наносит вреда экологии и окружающей среде.
МБРЛС ЗГО ПСИ не создает помехи радиоэлектронному оборудованию и отвечает требованиям по электромагнитной совместимости.
МБРЛС ЗГО ПСИ планируется применять как самостоятельно, так и в составе береговых комплексов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ загоризонтного обнаружения цели | 2020 |
|
RU2754770C1 |
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ И ПАССИВНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ, ИСПОЛЬЗУЕМАЯ ПРИ РЕАЛИЗАЦИИ ЭТОГО СПОСОБА | 2004 |
|
RU2275649C2 |
| Способ радиолокации | 2022 |
|
RU2797828C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МАЛОРАЗМЕРНЫХ ДВИЖУЩИХСЯ ЦЕЛЕЙ НА ФОНЕ НЕПОДВИЖНЫХ ОБЪЕКТОВ С ПОМОЩЬЮ ШУМОВОГО СИГНАЛА И ШУМОВАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ, РЕАЛИЗУЮЩАЯ ДАННЫЙ СПОСОБ | 2024 |
|
RU2831136C1 |
| БЕРЕГОВОЙ РАКЕТНЫЙ ПРОТИВОКОРАБЕЛЬНЫЙ КОМПЛЕКС | 2008 |
|
RU2389967C1 |
| Радиолокационная станция с квазинепрерывным шумовым сигналом | 2017 |
|
RU2677853C9 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЦЕЛИ В СИСТЕМЕ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА | 1976 |
|
SU1840919A1 |
| БЕРЕГОВОЙ РАКЕТНЫЙ КОМПЛЕКС | 2017 |
|
RU2671222C1 |
| КОРАБЕЛЬНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2005 |
|
RU2293405C1 |
| СПОСОБ ПЕРВИЧНОЙ ДАЛЬНОМЕТРИИ ЦЕЛЕЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС С МАЛОЙ СКВАЖНОСТЬЮ ЗОНДИРУЮЩИХ ПОСЫЛОК | 2020 |
|
RU2742461C1 |
Мобильная береговая радиолокационная станция загоризонтного обнаружения с повышенной скрытностью излучения (МБРЛС ЗГО ПСИ) содержит высокочастотный антенный модуль, модуль цифрового формирования и обработки сигналов, модуль управления, комплекс средств связи и передачи данных, спутниковую и инерциальную системы навигации и позиционирования в пространстве, программное обеспечение, высокопроходимое автотранспортное средство с системой электропитания и средствами жизнеобеспечения. Обеспечивается увеличение дальности обнаружения целей. 1 ил.
Мобильная береговая радиолокационная станция загоризонтного обнаружения с повышенной скрытностью излучения (МБРЛС ЗГО ПСИ), содержащая высокочастотный антенный модуль, модуль цифрового формирования и обработки сигналов, модуль управления, комплекс средств связи и передачи данных, спутниковую и инерциальную системы навигации и позиционирования в пространстве, программное обеспечение, высокопроходимое автотранспортное средство с системой электропитания и средствами жизнеобеспечения, отличающаяся тем, что в МБРЛС ЗГО ПСИ для увеличения дальности обнаружения целей при использовании эффекта распространения радиоволн Х-диапазона частот в волноводе испарения происходит определение собственным комплексом средств измерения и обработки метеоданных высоты волновода испарения, под которую осуществляется подстройка высоты высокочастотного антенного модуля с помощью подъемного устройства под оптимальную высоту для скрытного наблюдения за всей акваторией, в том числе и за радиогоризонт, за счет применения широкополосных сложных зондирующих шумоподобных квазинепрерывных сигналов с большой базой с высокой помехозащищенностью и малой слепой зоной при решении задач обнаружения целей с однозначным определением дальности и скорости за один цикл зондирования и выдачей признака движения цели.
| МОБИЛЬНАЯ ТРЕХКООРДИНАТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2017 |
|
RU2694711C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ КРУГОВОГО ОБЗОРА | 2012 |
|
RU2522982C2 |
| CN202600984 U, 12.12.2012 | |||
| CN105548971 A, 04.05.2016 | |||
| CN 0103278804 B, 08.02.2017. | |||

