Изобретение относится к области радиотехники и может быть использовано для радиолокации объектов (целей) с оценкой их координат.
Известен способ радиолокации с излучением и приемом непрерывных радиосигналов на удаленные друг от друга передатчики и приемники, позволяющие защитить приемники от мощного излучения передатчика.
Такой способ применялся на заре радиолокации в 30-х годах прошлого века и успешно использовался до появления импульсных РЛС, в которых передатчик и приемник работали на одну антенну (система РУС-1) («История отечественной радиолокации» под ред. С.В. Хохлова, М., стол, энциклоп, 2015).
Сегодня широко применяется способ импульсной радиолокации для обнаружения и оценки координат на больших дальностях («Справочник по радиолокации» под ред. М.И. Скольника «Техносфера», М., 2015, кн. 1).
Недостатком этого способа является низкая помехоустойчивость по причине широкой полосы пропускания приемника, обусловленной необходимостью приема импульсных радиосигналов малой длительности, порядка 1 мкс.
Известны радиолокаторы непрерывного излучения GW radar, которые используются для обнаружения движущихся целей по доплеровскому смещению частоты. Однако такие радиолокаторы не позволяют измерять дальность и не могут работать по неподвижным и малоскоростным целям (История отечественной радиолокации под ред. - С.В. Хохлова, М., изд. дом. Столичная энциклопедия, с. 735).
Для работы на малых дальностях менее 1000 м используются радиолокаторы с линейной частотной модуляцией, что нашло применение в радиовысотомерах.
Известна система отслеживания данных, патент США US 2594317 от 21.11.1942 г, состоящая из радиолокатора с двумя антеннами, одна из которых передающая, а вторая приемная, приводимая во вращение с помощью электромеханического привода, позволяющая реализовать на приеме равносигнальную зону и осуществить высокоточный прием угловых координат цели.
Эта система излучает импульсные сигналы и должна иметь широкополосный приемник, а передатчик большой импульсной мощности, что существенно снижает тактико-технические параметры радиолокатора.
Возможна также работа с узкополосными излучаемыми сигналами, однако при большой мощности передатчика, для защиты приемника от его излучения, требуется пространственный разброс между передающей и приемными антеннами как это сделано в системе в выше названной системе GW radar.
Имеется доплеровский метеорологический радиолокатор (международная заявка на патент WO 2013/141738 A), содержащий формирователь узкополосных и широкополосных зондирующих сигналов, широкополосный передатчик, антенный переключатель с двумя СВЧ циркуляторами, двухчастотный генератор, формирующий пачки коротких и длинных импульсов, а выходы циркуляторов подключены к двум вибраторам к горизонтальной и вертикальной поляризации.
Подобный метеорадиолокатор обладает повышенной точностью измерения атмосферных образований, однако, поскольку эта РЛС работает в импульсном режиме, то она обладает теми же недостатками что и предыдущий аналог, то есть не обеспечивает работу в узкой полосе частот, а следовательно, требует большой излучаемой мощности передатчика, не обладает скрытностью и помехоустойчивостью.
Известен автодинный способ радиолокации с работой радиопередатчика и приемника на одну антенну (прототип) (Бузыкин В.Т., Носков В.Я. «Автодины. Область применения и перспективы развития» «Радиотехнические системы миллиметрового и субмиллиметрового диапазона волн» Харьков, Институт радиофизики и электроники АН Украины, 1991, с. 38-47).
Однако, при работе на больших дальностях, когда требуется большая энергетика зондирующего сигнала, этот способ не применяется из-за проблематичности защиты приемных трактов РЛС от мощного излучения передатчика.
Предложенный способ исключает недостатки импульсных РЛС путем значительного снижения мощности передатчика за счет использования узкополосного радиосигнала и малой полосы пропускания приемника.
П. 1 Отличием заявленного изобретения является то, что диаграмму направленности антенны коммутируют вокруг равносигнальной зоны, на одной несущей частоте, а из принимаемого радиосигнала, путем амплитудной демодуляции выделяют сигналы на частоте коммутации, по которым определяют наличие цели в зоне обнаружения.
П. 2 Способ по П. 1, отличающийся тем, что частоту коммутации антенны выбирают с длиной волны не менее чем в два раза превышающей дальность действия РЛС.
П. 3. Способ по П. 1, отличающийся тем, что дальности до цели определяют путем измерения разности фаз между опорным сигналом частоты коммутации и принимаемыми сигналами этой частоты.
П. 4. Способ по П. 1, отличающийся тем, что излучение ведут низкочастотными циклами с заполнением импульсами высокой частоты, формируя при этом на выходе приемника две частотные шкалы грубой и точной оценки дальности.
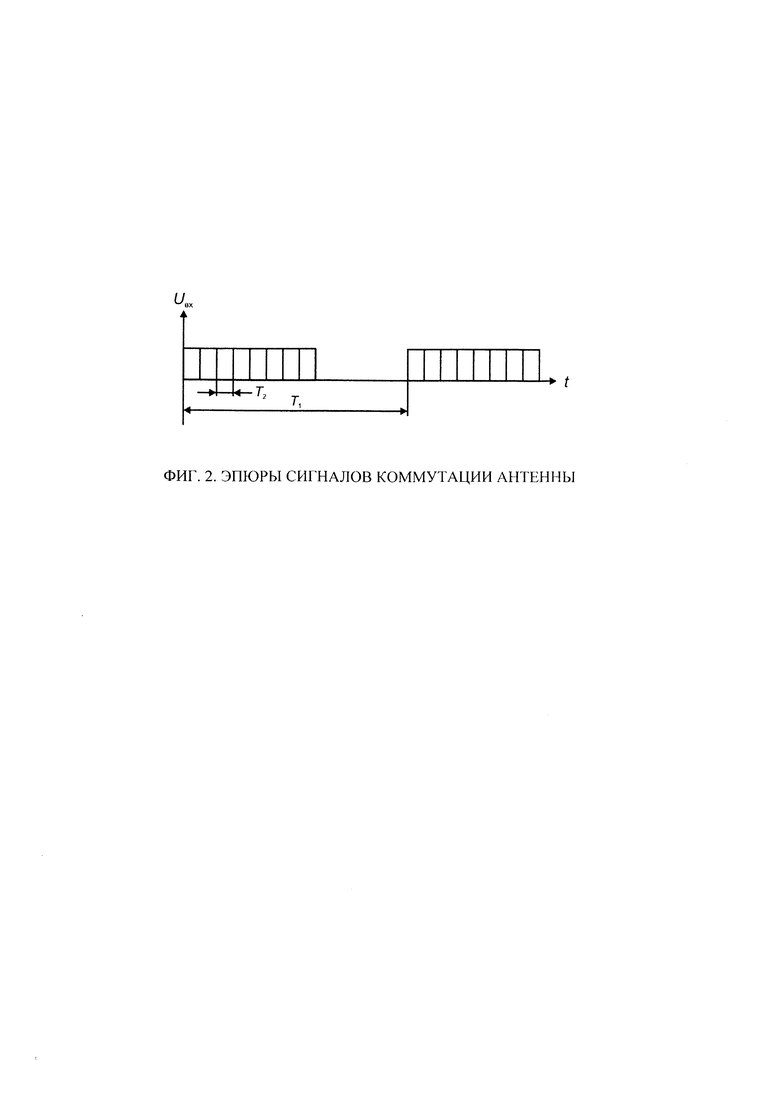
На фиг. 1 изображена структурная схема РЛС, реализующая заявленный способ, где: 1 - синтезатор частот; 2 - коммутатор; 3, 4 - циркуляторы; 5, 6 - антенные вибраторы; 7 - зеркало антенны, 8 - равносигнальная зона; 9 - объект локации (цель); 10 - диаграмма направленности; 11 - амплитудный детектор; 12 - полосовой фильтр; 13 - фазовый детектор; 14 - индикатор дальности (микроконтроллер); 15 - линия задержки; 16 - блок вычитания.
На фиг. 2 представлены временные эпюры сигналов коммутации антенны, где:  - грубая сетка измерения дальности;
- грубая сетка измерения дальности;  - точная сетка; r - предельная дальность до цели; Δr - разрешающая способность РЛС по дальности.
- точная сетка; r - предельная дальность до цели; Δr - разрешающая способность РЛС по дальности.
Способ работает следующим образом. Включается синтезатор частот 1, генерирующий сигнал несущей частоты ƒ РЛС и сигнал управления коммутатором 2, работающим на низкой частоте Fк. Сигнал несущей частоты ƒ поступает с коммутатора 2 на циркуляторы 3, 4, выходы, которых подсоединены соответственно к вибраторам антенн 5, 6 располагаемыми в фокусе зеркала 7, смещенным относительно центра фокуса.
В результате в направлении излучения формируется равносигнальная зона 8.
В этой зоне пространство сканируется по высоте и азимуту, так что при попадании цели в диаграмму направленности от нее отражается радиосигнал, модулированный на частоте коммутации Fк=Fc.
Отраженный полезный сигнал Fc от цели через циркуляторы 3 и 4 подается на амплитудный детектор 11 и через полосовой фильтр 12, настроенный на частоту Fc, поступает на фазовый детектор 13. В микроконтроллере 14 этот сигнал в виде огибающей преобразуется в цифровой код и отображается на индикаторе дальности.
Дальность до цели определяется по разности фаз между опорным сигналом на частоте коммутации FK и принятым полезным сигналом Fc. Для повышения точности определения дальности до цели излучение ведется периодическими циклами.
Компенсация отражений от местных предметов осуществляется путем вычитания в блоке 16 сигналов через период частоты коммутации, образуемой линией задержки 15.
Дадим сравнительную оценку энергетических параметров импульсной технологии и узкополосной квазинепрерывной технологии, заявленной настоящим патентом.
Импульсная мощность передачи РЛС оценивается как:

где: r - расстояние до цели; α - коэффициент поглощения радиоволн в атмосфере; (Рш+Рп) - суммарная мощность шума и помех на входе приемника; σц - эффективная площадь рассеяния цели (ЭПР);  - длина волны; с - скорость света; ƒ - несущая частота;
- длина волны; с - скорость света; ƒ - несущая частота;  - коэффициент направленного действия антенны; Аэф=k⋅SA - эффективная площадь антенны; k - коэффициент использования антенны; SA - площадь раскрыва антенны;
- коэффициент направленного действия антенны; Аэф=k⋅SA - эффективная площадь антенны; k - коэффициент использования антенны; SA - площадь раскрыва антенны;  - требуемое отношения сигнал/шум на входе приемника; Рш=K⋅Т0⋅Δƒ - мощность собственных шумов приемника;
- требуемое отношения сигнал/шум на входе приемника; Рш=K⋅Т0⋅Δƒ - мощность собственных шумов приемника;  - постоянная Больцмана; Т0=300°K - температура входных цепей приемника по Кельвину; Δƒ - полоса пропускания приемника.
- постоянная Больцмана; Т0=300°K - температура входных цепей приемника по Кельвину; Δƒ - полоса пропускания приемника.
Подстановка следующих численных значений параметров для импульсивного режима, на дистанции r=300 км; е-2αr=0,1; Рп=10⋅Рш; ρ=10; σц=1 м2; GA=1250; Аэф=1 м2; ƒ=10 ГГц; Δƒ=1 МГц, при проведении расчетов дает Ри=50 кВт, Рср=150 Вт, а на дистанции r=600 км, Ри=32 МВт, Рср=10 кВт.
В случае узкополосной квазинепрерывной технологии по заявленному способу, средняя мощность передатчика на дистанцию r=300 км, при полосе пропускания приемника Δƒ=10 Гц снизится до Рср=0,5 Вт, а энергетический выигрыш составит 105 раз.
Таким образом, в узкополосном режиме получается чрезвычайно небольшая мощность передатчика, что вполне позволяет реализовать СВЧ приемо-передатчик и антенну на современной полосковой технологии в переносном варианте. Недостатком заявленного способа является проблема оценки дальности до цели. В импульсной технологии она измеряется временем запаздывания радиосигнала, а в узкополосном, путем определения разности фаз между опорным сигналом частоты коммутации и принятым.
Так, на грубой шкале, при точности измерения разности фаз 1°, ошибка оценки дальности, при дистанции 300 км и частоте коммутации  составит ΔrГ=1700 м. На точной шкале, при FК=500 кГц, величина ΔrT=170 м.
составит ΔrГ=1700 м. На точной шкале, при FК=500 кГц, величина ΔrT=170 м.
Для тех же параметров в импульсный технологии ΔrИ=700 м. Недостатком заявленного способа является работа по одиночным и групповым целям только в назначенном секторе по азимуту, поскольку фазовая отметка от цели будет неоднозначной.
Несмотря на это, имеется множество прикладных задач, где узкополосная технология оправдана и приносит ощутимые преимущества.
Основные из них это высокая помехоустойчивость и скрытность работы РЛС; малая мощность излучения передатчика; возможность работать на малых и больших дальностях, малогабаритность, за исключением размеров антенны, определяющих точность оценки угловых координат целей.
Из прикладных направлений использования новой технологии особенно интересно применение: в загоризонтной радиолокации на дальностях более 1000 км; подповерхностной, для поиска взрывчатых веществ; дефектоскопии магистральных трубопроводов и железнодорожных рельс; высокоточного измерения расстояний, в частности смещения геофизических створов высотных плотин; обнаружения сверхмалых целей, типа беспилотных аппаратов ЭПР менее 0,1 м2, задача которая неподвластна импульсный радиолокации.
Для высокоскоростных целей, расширяющих полосу спектра отраженных сигналов, в приемнике, на выходе демодулятора должен быть установлен соответствующий фильтр.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система защиты кораблей от подводных дронов | 2024 |
|
RU2832756C1 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ МОНИТОРИНГА ГЕОДЕЗИЧЕСКОГО СТВОРА ВЫСОТНЫХ ПЛОТИН ГЭС | 2021 |
|
RU2760505C1 |
| Способ создания зоны защиты территорий от низколетящих беспилотных летательных аппаратов | 2023 |
|
RU2821856C1 |
| Система для дистанционного обнаружения дефектов и мест несанкционированной откачки в магистральных трубопроводах | 2024 |
|
RU2821691C1 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОБНАРУЖЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2622908C1 |
| Дистанционная система обнаружения несанкционированных врезок в магистральные трубопроводы | 2024 |
|
RU2839501C1 |
| Способ дистанционной диагностики магистральных трубопроводов | 2024 |
|
RU2826327C1 |
| СПОСОБ РАДИОЛОКАЦИИ НА ОСНОВЕ МНОГОПОЗИЦИОННЫХ СИСТЕМ ПЕРЕДАЧИ И ПРИЕМА | 2024 |
|
RU2840797C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА УПРАВЛЕНИЯ ПО РАДИОЛУЧУ | 2003 |
|
RU2249229C2 |
| АЭРОЛОГИЧЕСКИЙ РАДИОЗОНД С ГОМОДИННЫМ ПРИЕМОПЕРЕДАТЧИКОМ СИСТЕМЫ РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2024 |
|
RU2829602C1 |
Изобретение относится к области радиотехники и может быть использовано для радиолокации объектов (целей) с оценкой их координат. Техническим результатом является значительное снижение мощности передатчика за счет использования узкополосного радиосигнала и малой полосы пропускания приемника, повышение скрытности излучения; обеспечение возможности работать как на малых, так и больших дальностях. Упомянутый технический результат достигается тем, что диаграмму направленности антенны коммутируют вокруг равносигнальной зоны, на одной несущей частоте, а из принимаемого радиосигнала путем амплитудной демодуляции выделяют сигналы на частоте коммутации, по которым определяют наличие цели в зоне обнаружения. При этом излучение ведут низкочастотными циклами с заполнением импульсами высокой частоты, формируя при этом на выходе приемника две частотные шкалы грубой и точной оценки дальности, что позволяет снять неоднозначность при фазовом методе измерения дальности. 1 з.п. ф-лы, 2 ил.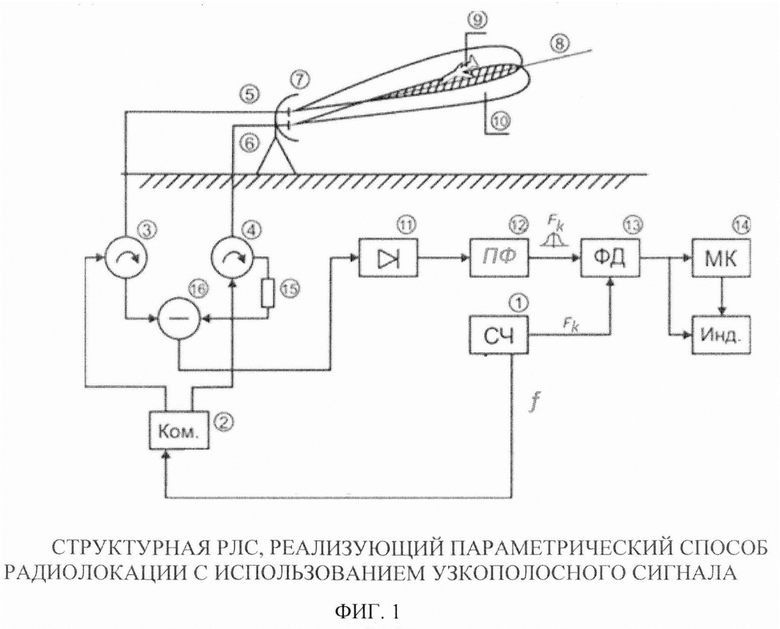
1. Способ радиолокации, заключающийся в излучении и приеме электромагнитных узкополосных радиосигналов на одну антенну, отличающийся тем, что в направлении излучения формируют равносигнальную зону, путем излучения сигнала несущей частоты ƒ, поступающего с коммутатора на циркуляторы, соединенные с вибраторами антенн, располагаемыми в фокусе зеркала, пространство равносигнальной зоны сканируют по высоте и азимуту, диаграмму направленности антенны коммутируют вокруг равносигнальной зоны, при этом частоту коммутации Fk антенны выбирают с длиной волны, не менее чем в два раза превышающей дальность действия радиолокационной станции (РЛС), и при попадании цели в диаграмму направленности от цели отражается полезный радиосигнал Fc, модулированный на частоте коммутации, а из принимаемого отраженного радиосигнала, путем амплитудной демодуляции, выделяют сигналы с частотой коммутации, по которым определяют наличие цели в зоне обнаружения и определение дальности до цели, при этом определение дальности осуществляют по разности фаз между опорным сигналом на частоте коммутации Fk и принятым полезным сигналом Fc.
2. Способ радиолокации по п. 1, отличающийся тем, что определение дальности до цели излучения ведется периодическими циклами.
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Устройство для измерения линейных размеров нагретых поковок | 1958 |
|
SU121942A1 |
| ПЕЛЕНГАТОР В ДВУХ ПЛОСКОСТЯХ | 1998 |
|
RU2134430C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1999 |
|
RU2155354C1 |
| УСТРОЙСТВО ДЛЯ ПОИСКА И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЛЮДЕЙ | 2012 |
|
RU2509370C2 |
| Колосоуборка | 1923 |
|
SU2009A1 |
