Изобретение относится к области систем автоматического управления, в частности к системам наведения артиллерийского и ракетного вооружения, и может быть использовано в электрических приводах наведения вооружения артиллерийских орудий, пусковых установок ракетных комплексов и реактивных систем залпового огня, в которых в качестве усилителя мощности используется электромашинный усилитель поперечного поля.
Известна электромашинная следящая система управления скоростью (Блейз Е.С., Семенов Ю.Н., Чемоданов Б.К., Якименко Н.М. Динамика электромашинных следящих систем. - М.: Энергия, 1967. - 408 с, рис. 1-13).
Недостатком данной системы управления является использование в качестве датчика скорости вала исполнительного двигателя тахогенератора постоянного тока. Использование в системе управления скоростью тахогенератора постоянного тока снижает ее надежность. Кроме того, для обеспечения устойчивой работы замкнутого контура управления скоростью необходимо обеспечить безлюфтовое соединение валов исполнительного двигателя и тахогенератора, что существенно усложняет конструкцию механических узлов объекта военной техники.
Наиболее близким устройством того же назначения к заявленному изобретению по совокупности признаков является электропривод боевой машины БМ-21 (Боевая машина БМ-21. Техническое описание и инструкция по эксплуатации. М.: Военное издательство, 1982 г.), принятый за прототип.
Это устройство содержит дающее устройство, поляризованное реле, первый вывод обмотки управления которого соединен с выходом дающего устройства, электромашинный усилитель, первые выводы первой и второй обмоток управления которого соединены между собой и соединены с положительным полюсом источника питания боевой машины, второй вывод первой обмотки управления соединен с первым контактом поляризованного реле, второй вывод второй обмотки управления соединен со вторым контактом поляризованного реле, исполнительный электродвигатель постоянного тока, первый вывод якоря которого соединен с первой продольной щеткой якоря генератора электромашинного усилителя, второй вывод якоря соединен со второй продольной щеткой якоря генератора электромашинного усилителя, второй вывод обмотки управления поляризованного реле соединен с первой продольной щеткой якоря генератора электромашинного усилителя.
В качестве сигнала обратной связи по скорости вала исполнительного двигателя в этом устройстве используется напряжение, снимаемое с первой продольной щетки якоря генератора электромашинного усилителя.
Недостатком этого устройства является недостаточная надежность, обусловленная применением поляризованного реле, имеющего невысокий ресурс.
Изобретение направлено на повышение надежности и плавности работы привода при низких скоростях наведения.
Сущность технического решения заключается в следующем. Наведение артиллерийского и ракетного вооружения в современных объектах военной техники осуществляется приводами наведения. При наведении вооружения в полуавтоматическом режиме оператор воздействует на дающее устройство, которое вырабатывает сигнал заданной скорости наведения. Сигнал заданной скорости наведения с дающего устройства подается на схему управления, вырабатывающую сигнал управления приводом наведения, который далее усиливается по мощности до уровня, необходимого для управления исполнительным двигателем, приводящим в движение вооружение объекта военной техники со скоростью, соответствующей сигналу заданной скорости от дающего устройства. При этом в качестве исполнительных двигателей приводов наведения среди прочих типов двигателей находят применение двигатели постоянного тока, для управления которыми в качестве усилителя мощности используются электромашинные усилители поперечного поля.
Для обеспечения постоянства скорости наведения при постоянном сигнале заданной скорости от дающего устройства в условиях изменяющихся внешних воздействий на привод наведения, например, изменяющихся моментов нагрузки, изменяющихся условий окружающей среды, в приводах наведения используется отрицательная обратная связь по скорости вала исполнительного двигателя. В качестве датчика скорости вала исполнительного двигателя могут быть использованы тахогенераторы постоянного тока. Недостатком тахогенераторов постоянного тока является их невысокая надежность. Кроме того, для обеспечения устойчивой работы замкнутого контура управления скоростью необходимо обеспечить безлюфтовое соединение валов исполнительного двигателя и тахогенератора, что существенно усложняет конструкцию механических узлов объекта военной техники.
В электрических приводах наведения с электромашинным усилителем мощности, как показано в устройстве, принятом за прототип, в качестве сигнала обратной связи по скорости может быть использовано напряжение с продольной щетки якоря генератора электромашинного усилителя. Однако применение в прототипе поляризованного реле снижает надежность привода наведения.
Для обеспечения высокой плавности движения вооружения при низких скоростях наведения необходимо иметь достаточно глубокую обратную связь по скорости вала исполнительного двигателя, то есть коэффициент передачи сигнала обратной связи по скорости вала исполнительного двигателя должен быть достаточно большим. В то же время для обеспечения максимальной скорости наведения этот коэффициент передачи должен иметь сравнительно небольшое значение. Обеспечение высокой плавности движения вооружения при низких скоростях наведения и максимальной скорости наведения может быть достигнуто благодаря использованию в цепи обратной связи по скорости вала исполнительного двигателя нелинейного корректирующего звена с переменной крутизной.
Указанный технический результат при осуществлении изобретения достигается тем, что в привод наведения, содержащий дающее устройство, электромашинный усилитель, первые выводы первой и второй обмоток управления которого соединены между собой, исполнительный электродвигатель постоянного тока, первый вывод якоря которого соединен с первой продольной щеткой якоря генератора электромашинного усилителя, второй вывод якоря соединен со второй продольной щеткой якоря генератора электромашинного усилителя, введены сумматор, первый вход которого соединен с выходом дающего устройства, широтно-импульсный модулятор, вход которого соединен с выходом сумматора, первый выход соединен со вторым выводом первой обмотки управления электромашинного усилителя, второй выход соединен со вторым выводом второй обмотки управления электромашинного усилителя, третий выход соединен с замкнутыми между собой первыми выводами первой и второй обмоток управления электромашинного усилителя, дифференциальный усилитель, первый вход которого соединен с первой продольной щеткой якоря генератора электромашинного усилителя, второй вход соединен с поперечной щеткой якоря генератора электромашинного усилителя, нелинейное корректирующее звено с переменной крутизной, вход которого соединен с выходом дифференциального усилителя, а выход соединен со вторым входом сумматора.
В заявленном устройстве повышение надежности и плавности работы привода при низких скоростях наведения обеспечивается благодаря изменению схемы привода наведения с применением более надежных по сравнению с поляризованным реле сумматора, дифференциального усилителя, широтно-импульсного модулятора, а также нелинейного корректирующего звена с переменной крутизной, имеющего большую крутизну при малых по абсолютной величине значениях его входного сигнала и меньшую крутизну при больших по абсолютной величине значениях входного сигнала.
На фигуре приведена схема заявленного устройства.
Сведения, подтверждающие возможность осуществления изобретения с получением указанного выше технического результата, заключаются в следующем.
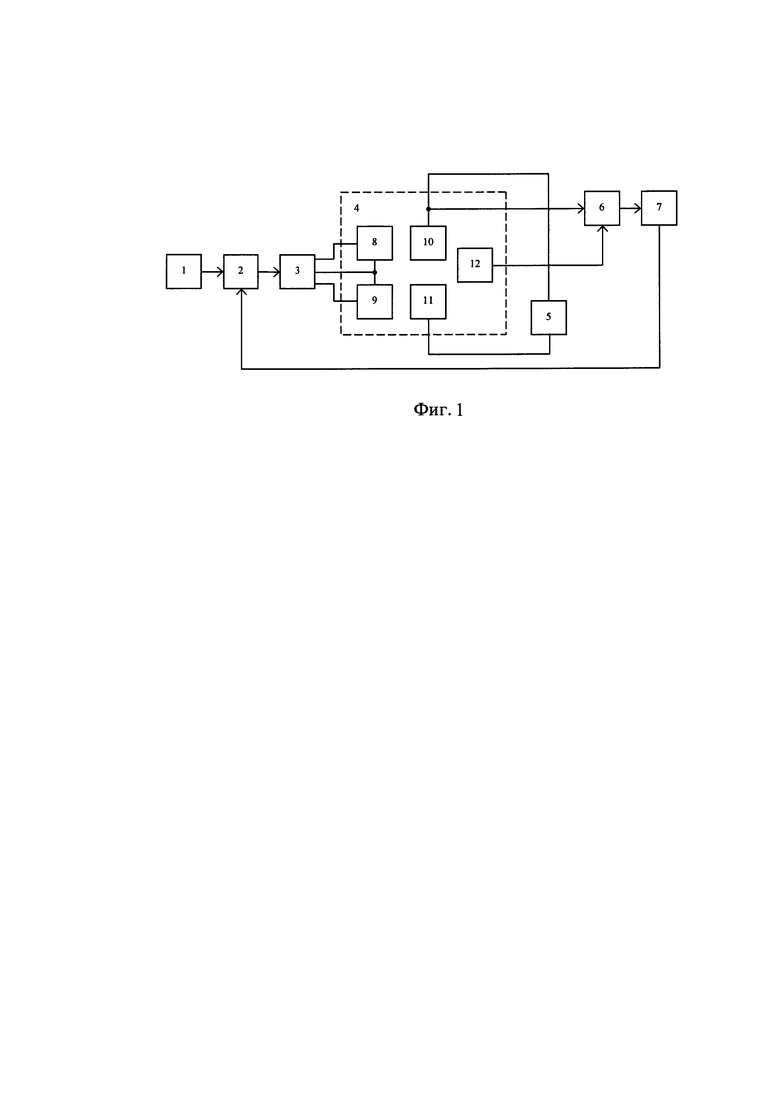
Привод наведения (фиг.) содержит дающее устройство 1, сумматор 2, широтно-импульсный модулятор 3, электромашинный усилитель 4, исполнительный двигатель постоянного тока 5, дифференциальный усилитель 6, нелинейное корректирующее звено с переменной крутизной 7.
Первый вход сумматора 2 соединен с выходом дающего устройства 1, выход сумматора 2 соединен с входом широтно-импульсного модулятора 3. Первые выводы первой 8 и второй 9 обмоток управления электромашинного усилителя 4 соединены между собой и с третьим выходом широтно-импульсного модулятора 3. Первый и второй выходы широтно-импульсного модулятора 3 соединены со вторыми выводами первой 8 и второй 9 обмоток управления электромашинного усилителя 4 соответственно. Первый и второй выводы якоря исполнительного двигателя постоянного тока 5 соединены соответственно с первой 10 и второй 11 продольными щетками якоря генератора электромашинного усилителя 4. Первая продольная щетка 10 якоря генератора электромашинного усилителя 4 соединена с первым входом дифференциального усилителя 6, второй вход которого соединен с поперечной щеткой 12 якоря генератора электромашинного усилителя 4, а выход - с входом нелинейного корректирующего звена с переменной крутизной 7, выход которого соединен со вторым входом сумматора 2.
Привод наведения работает следующим образом.
Дающее устройство 1 вырабатывает сигнал заданной скорости наведения, поступающий на первый вход сумматора 2. С выхода сумматора 2 сигнал поступает на вход широтно-импульсного модулятора 3, усиливающего выходной сигнал сумматора 2 по напряжению и току до уровня, необходимого для управления электромашинным усилителем 4.
При положительной полярности выходного сигнала сумматора 2 широтно-импульсным модулятором 3 вырабатывается напряжение между его первым и третьим выходами, под действием которого протекает электрический ток в первой обмотке управления 8 электромашинного усилителя 4. В результате протекания тока в первой обмотке управления 8 между первой 10 и второй 11 продольными щетками якоря генератора электромашинного усилителя 4 возникает напряжение, под действием которого вал исполнительного двигателя постоянного тока 5 приводится во вращение.
При отрицательной полярности выходного сигнала сумматора 2 широтно-импульсным модулятором 3 вырабатывается напряжение между его вторым и третьим выходами, под действием которого протекает электрический ток во второй обмотке управления 9 электромашинного усилителя 4. В результате протекания тока во второй обмотке управления 9 между первой 10 и второй 11 продольными щетками якоря генератора электромашинного усилителя 4 возникает напряжение противоположного знака по сравнению с протеканием электрического тока в первой обмотке управления 8, под действием которого вал исполнительного двигателя постоянного тока 5 приводится во вращение в другую сторону.
На выходе дифференциального усилителя 6, на первый вход которого поступает напряжение, снимаемое с первой продольной щетки 10 якоря генератора электромашинного усилителя 4, а на второй вход поступает напряжение, снимаемое с поперечной щетки 12 якоря генератора электромашинного усилителя 4, вырабатывается сигнал обратной связи по скорости вала исполнительного двигателя постоянного тока 5, который через нелинейное корректирующее звено с переменной крутизной 7 поступает на второй вход сумматора 2. При малых значениях выходного сигнала дифференциального усилителя 6, соответствующих низким скоростям вала исполнительного двигателя постоянного тока 5 и низким скоростям наведения вооружения, нелинейное корректирующее звено с переменной крутизной 7 имеет большую крутизну, обеспечивающую глубокую обратную связь по скорости вала исполнительного двигателя постоянного тока 5 и высокую плавность наведения вооружения. При больших значениях выходного сигнала дифференциального усилителя 6, соответствующих высоким скоростям вала исполнительного двигателя постоянного тока 5 и высоким скоростям наведения вооружения, нелинейное корректирующее звено с переменной крутизной 7 имеет меньшую крутизну, обеспечивающую возможность достижения максимальной скорости вала исполнительного двигателя постоянного тока 5 и высокой максимальной скорости наведения вооружения.
В предлагаемом изобретении при практической реализации могут быть использованы известные схемные реализации сумматора и дифференциального усилителя.
В качестве дающего устройства могут быть использованы электромеханические пульты управления, потенциометры, переменные резисторы, приборы ввода-вывода информации, устройства ввода информации в ЭВМ, а также другие известные схемные реализации.
В качестве электромашинного усилителя могут быть использованы электромашинные усилители поперечного поля.
В качестве исполнительного двигателя постоянного тока могут быть использованы двигатели постоянного тока с независимым возбуждением и возбуждением от постоянных магнитов.
В качестве широтно-импульсного модулятора могут быть использованы известные его схемные реализации.
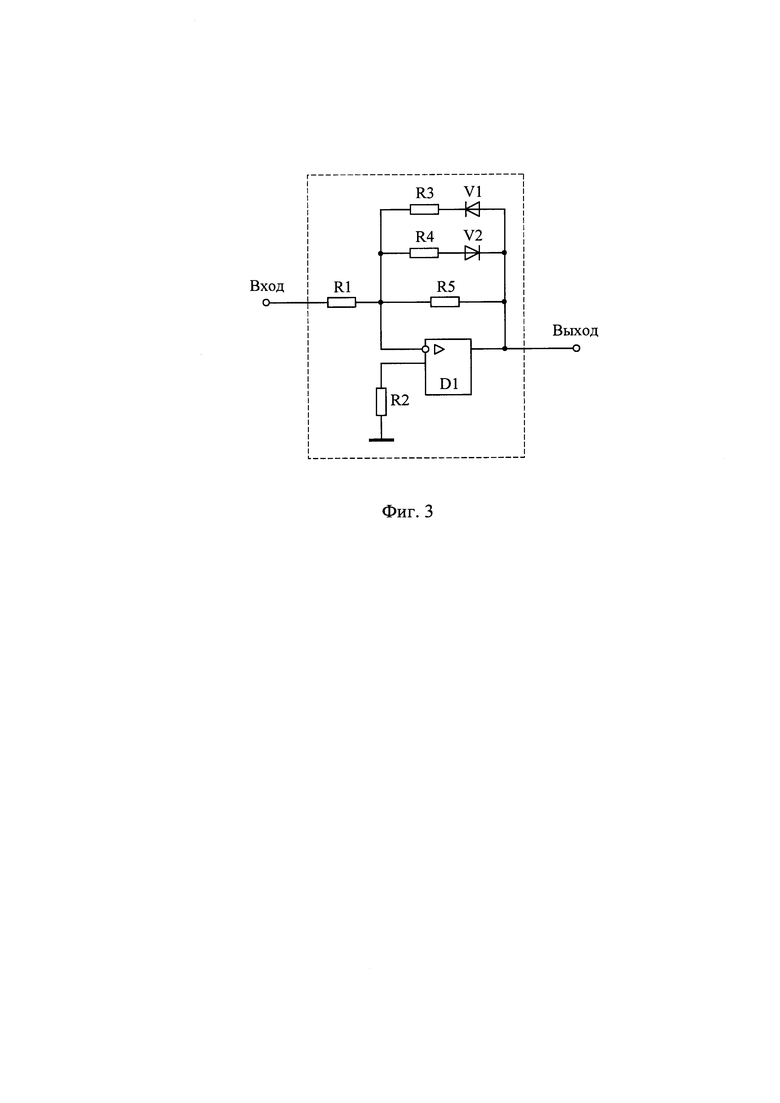
В качестве нелинейного корректирующего звена с переменной крутизной могут быть использованы известные его схемные реализации.
В качестве примера на фиг. 3 изображена схема нелинейного корректирующего звена с переменной крутизной, реализованного на операционном усилителе.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий привод наведения | 2024 |
|
RU2835471C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| РЕЛЕЙНЫЙ ПНЕВМО-ГИДРОПРИВОД С ВИБРАЦИОННОЙ ЛИНЕАРИЗАЦИЕЙ СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2003 |
|
RU2243491C1 |
| СИСТЕМА УПРАВЛЕНИЯ НАВЕДЕНИЕМ ИНЕРЦИОННОГО ОБЪЕКТА | 2014 |
|
RU2537256C1 |
| СИСТЕМА УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ ВООРУЖЕНИЯ | 2014 |
|
RU2555184C1 |
| ПРИВОД СТАБИЛИЗАЦИИ И НАВЕДЕНИЯ ТАНКОВОГО ВООРУЖЕНИЯ | 2008 |
|
RU2376548C1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2023 |
|
RU2827861C1 |
| ЦИФРОВОЙ ЭЛЕКТРОПРИВОД | 2009 |
|
RU2404449C1 |
| Фотогравировальное устройство | 1982 |
|
SU1076306A1 |
| СИСТЕМА СТАБИЛИЗАЦИИ И УПРАВЛЕНИЯ ВООРУЖЕНИЕМ БОЕВОЙ МАШИНЫ | 2016 |
|
RU2628038C2 |
Изобретение относится к области систем автоматического управления и касается привода наведения. Привод содержит дающее устройство, электромашинный усилитель, исполнительный электродвигатель постоянного тока, сумматор, широтно-импульсный модулятор, дифференциальный усилитель и нелинейное корректирующее звено с переменной крутизной. Выводы якоря исполнительного электродвигателя соединены с продольными щетками якоря электромашинного усилителя. Первый вход сумматора соединен с выходом дающего устройства, а выход с входом широтно-импульсного модулятора. Первый и второй выходы широтно-импульсного модулятора соединены со вторыми выводами первой и второй обмоток управления электромашинного усилителя. Третий выход соединен с замкнутыми между собой первыми выводами первой и второй обмоток управления электромашинного усилителя. Первый и второй входы дифференциального усилителя соединены с первой продольной и поперечной щетками якоря генератора электромашинного усилителя. Вход нелинейного корректирующего звена соединен с выходом дифференциального усилителя, а выход соединен со вторым входом сумматора. Технический результат заключается в повышении надежности и плавности работы привода при низких скоростях наведения. 3 ил.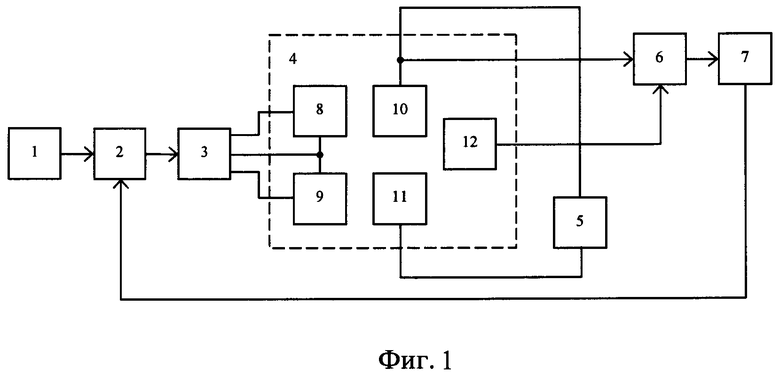
Привод наведения, содержащий дающее устройство, электромашинный усилитель, первые выводы первой и второй обмоток управления которого соединены между собой, исполнительный электродвигатель постоянного тока первый вывод якоря которого соединен с первой продольной щеткой якоря генератора электромашинного усилителя, второй вывод якоря соединен со второй продольной щеткой якоря генератора электромашинного усилителя, отличающийся тем, что в него введены сумматор, первый вход которого соединен с выходом дающего устройства, широтно-импульсный модулятор, вход которого соединен с выходом сумматора, первый выход соединен со вторым выводом первой обмотки управления электромашинного усилителя, второй выход соединен со вторым выводом второй обмотки управления электромашинного усилителя, третий выход соединен с замкнутыми между собой первыми выводами первой и второй обмоток управления электромашинного усилителя, дифференциальный усилитель, первый вход которого соединен с первой продольной щеткой якоря генератора электромашинного усилителя, второй вход соединен с поперечной щеткой якоря генератора электромашинного усилителя, нелинейное корректирующее звено с переменной крутизной, вход которого соединен с выходом дифференциального усилителя, а выход соединен со вторым входом сумматора.
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Техническое описание и инструкция по эксплуатации, М., Военное издательство, 1982 г | |||
| СЛЕДЯЩАЯ СИСТЕМА НАВЕДЕНИЯ | 2006 |
|
RU2347172C2 |
| Бункер | 1940 |
|
SU60908A1 |
| Устройство для подключения и закрепления съемных радиоэлектронных блоков | 1977 |
|
SU714670A1 |

