Изобретение относится к системам автоматического управления, а именно к следящим системам наведения объектов с ограниченным углом поворота, и может быть использовано в системах наведения мобильных робототехнических комплексов, самоходных артиллерийских установок, пусковых установок ракетных и ракетно-пушечных комплексов.
Известна следящая система, в которой при срабатывании концевого выключателя предельного угла наведения (электрического упора) отключается входной управляющий сигнал, соответствующий движению наводимого объекта в сторону упора («ЗСУ-23-4М. Силовые приводы наведения 2Э2». Техническое описание ПБ 1.452.010 ТО. - 1972).
Отсутствие в системе устройства торможения при движении наводимого объекта с большой скоростью в сторону упора приводит к их соударению, что делает возможным выход объекта из строя.
Известна также следящая система наведения, в которой после срабатывания концевого выключателя предельного угла наведения наряду с отключением входного управляющего сигнала, соответствующего движению объекта в сторону упора, осуществляется динамическое торможение объекта путем замыкания якоря электромашинного усилителя на резистор («Система ЭСП РБУ-6000/1000». Техническое описание БК1.421.072 ТО. - 1974).
В обеих упомянутых выше следящих системах из-за воздействия внешнего момента (например, момента неуравновешенности или ветрового момента) в районе срабатывания концевого выключателя (электрического упора) возникают автоколебания. Следствием этого является невысокая надежность систем.
Наиболее близким к заявляемому изобретению по совокупности признаков является система стабилизации и наведения по патенту РФ на полезную модель RU 6610 U1, F41G 7/00, 1998, принятая за прототип.
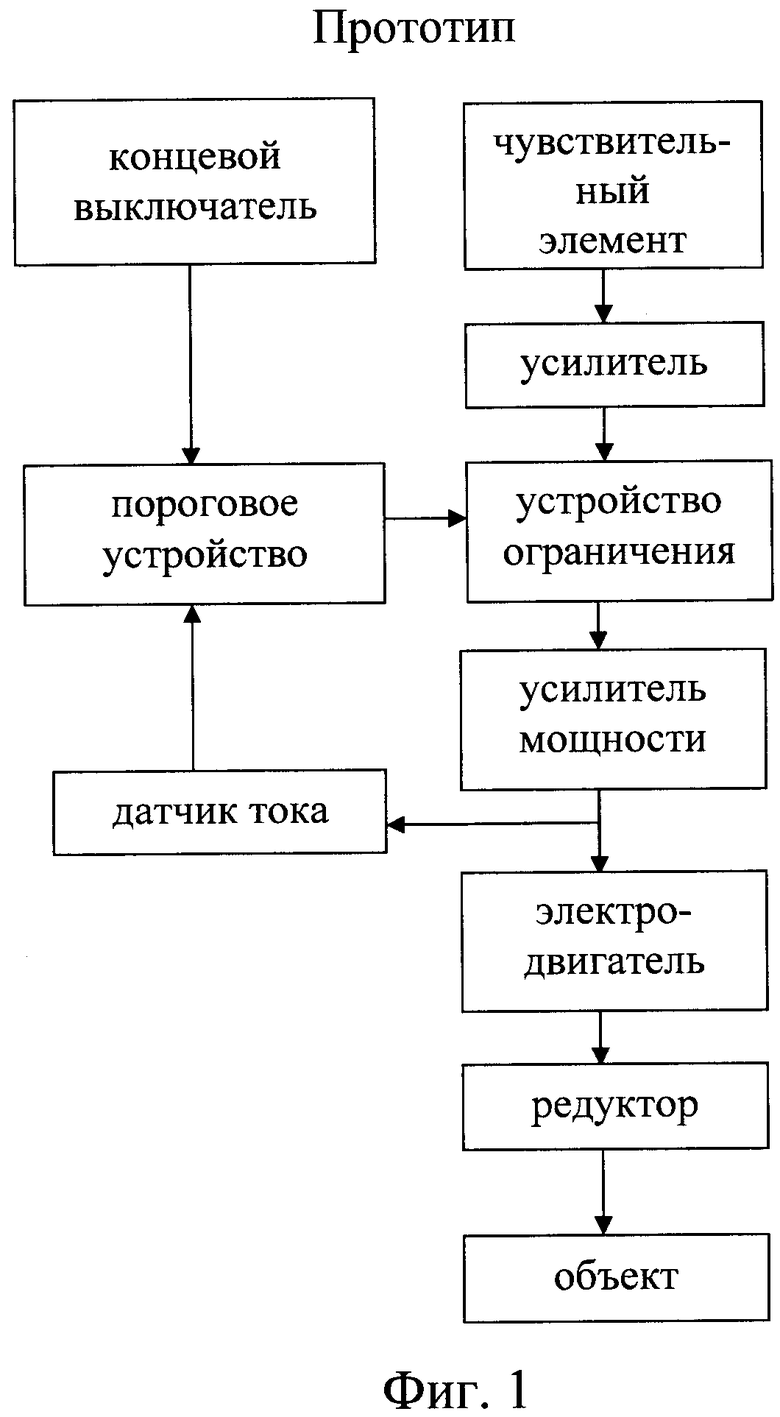
Блок-схема прототипа представлена на фиг.1.
Система содержит последовательно соединенные чувствительный элемент, усилитель, устройство ограничения, усилитель мощности, электродвигатель, редуктор и объект, а также концевой выключатель и датчик тока, вход которого соединен с выходом усилителя мощности. В систему введено пороговое устройство, первый и второй входы которого соединены соответственно с выходом датчика тока и с выходом концевого выключателя, а выход порогового устройства соединен с вторым входом устройства ограничения.
В динамике данная система стабилизирует угловое положение объекта по сигналам чувствительного элемента. При приближении объекта к механическому упору срабатывает концевой выключатель, причем угол между положениями механического упора и концевого выключателя может составлять для различных известных систем стабилизации величину от нескольких угловых минут до нескольких градусов. Ограничение сигнала на входе усилителя мощности с помощью устройства ограничения производится только при срабатывании концевого выключателя и наличии на выходе датчика тока напряжения, превышающего напряжение, соответствующее номинальному току якоря электродвигателя. При этом происходит ограничение входного напряжения усилителя мощности таким образом, что обеспечивается прижатие объекта к механическому упору, исключающее автоколебания системы стабилизации на упоре и перегрев электродвигателя.
Недостатком прототипа является невысокая надежность, связанная с возможность выхода из строя исполнительного привода и объекта из-за ударов последнего о механический упор. Указанные удары происходят из-за отсутствия торможения при движении объекта в сторону механического упора из-за инерционности объекта.
Техническим результатом заявляемого изобретения является повышение надежности следящей системы наведения за счет исключения удара наводимого объекта о механический упор.
Сущность изобретения заключается в следующем. Следящая система наведения содержит исполнительный привод, усилитель мощности, датчик тока, вход которого соединен с выходом усилителя мощности, ограничитель углов, связанный с наводимым объектом. В отличие от прототипа в систему введены измеритель рассогласования, усилитель, сумматор, датчик скорости, масштабирующее устройство, датчик положения, механически связанный с наводимым объектом, коммутатор фазы, фазочувствительный ограничитель и устройство токоограничения. При этом вход измерителя рассогласования является входом следящей системы, а выход соединен с входом усилителя. Сумматор, усилитель мощности и исполнительный привод соединены последовательно. Исполнительный привод механически связан с входами наводимого объекта и датчика скорости. Электрический выход датчика скорости соединен с первым входом сумматора через масштабирующее устройство. Выход датчика положения соединен со вторым входом измерителя рассогласования. Первый вход коммутатора фазы соединен с выходом ограничителя углов, а выход - со вторым входом сумматора. Первый вход фазочувствительного ограничителя соединен с выходом усилителя, второй вход - с выходом ограничителя углов, а выход - с третьим входом сумматора. Первый вход устройства токоограничения соединен с выходом датчика тока, второй вход - с выходом ограничителя углов, а выход - с четвертым входом сумматора. Второй вход коммутатора фазы соединен с выходом датчика скорости.
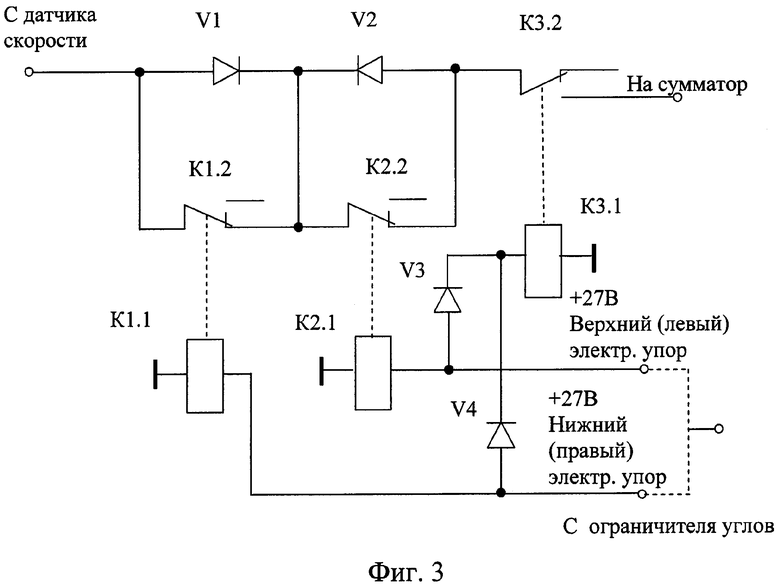
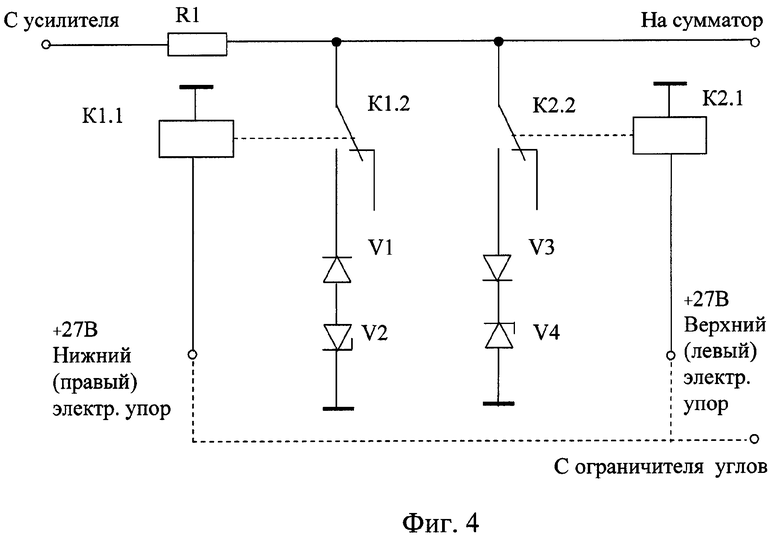
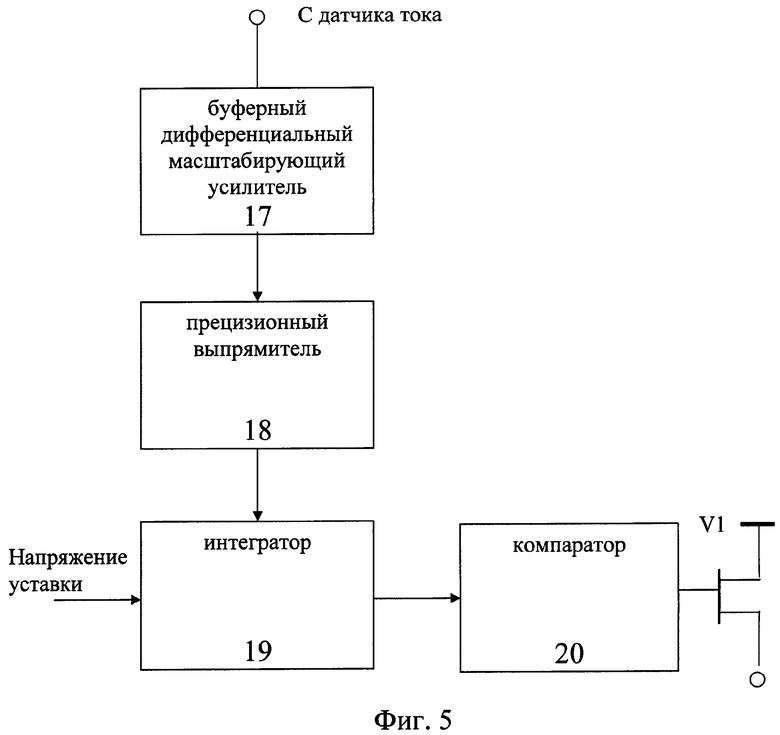
Изобретение поясняется графическими материалами, где на фиг.1 представлена блок-схема прототипа, на фиг.2 - блок-схема заявляемого изобретения, на фиг.3-5 приведены примеры реализации отдельных узлов следящей системы наведения, а именно: на фиг.3 - электрическая схема коммутатора фазы, на фиг.4 - электрическая схема фазочувствительного ограничителя сигнала, на фиг.5 - блок-схема устройства токоограничения.
На фигурах приняты следующие обозначения:
1 - измеритель рассогласования,
2 - усилитель,
3 - коммутатор фазы,
4 - сумматор,
5 - усилитель мощности,
6 - исполнительный привод,
7 - наводимый объект,
8 - датчик скорости,
9 - масштабирующее устройство,
10 - датчик положения,
11 - формирователь сигнала поджима,
12 - коммутатор,
13 - ограничитель углов,
14 - фазочувствительный ограничитель сигналов,
15 - датчик тока,
16 - устройство токоограничения,
17 - буферный дифференциальный масштабирующий усилититель,
18 - прецизионный выпрямитель,
19 - интегратор,
20 - компаратор.
Заявляемая следящая система наведения (фиг.2) содержит последовательно соединенные: измеритель рассогласования 1, первый вход которого является входом системы, усилитель 2, фазочувствительный ограничитель сигнала 14, сумматор 4, усилитель мощности 5, исполнительный привод 6, механически связанный с входами объекта регулирования 7 и датчика скорости 8. Электрический выход датчика скорости через масштабирующее устройство 9 соединен со вторым входом сумматора. Наводимый объект механически связан с датчиком положения 10, выход которого соединен со вторым входом измерителя рассогласования. Следящая система также содержит коммутатор фазы 3 и ограничитель углов 13, связанный с наводимым объектом. Выход ограничителя углов соединен с первым входом коммутатора фазы 3 и со вторым входом фазочувствительного ограничителя 14. Второй вход коммутатора фазы соединен с выходом датчика скорости, а выход - с третьим входом сумматора. Кроме того, система содержит датчик тока 15, вход которого соединен с выходом усилителя мощности, и устройство токоограничения 16, первый вход которого соединен с выходом датчика тока 13, второй вход - с выходом ограничителя углов, а выход - с четвертым входом сумматора.
Следящая система работает следующим образом. Наведение объекта 7 осуществляется по сигналу рассогласования, формируемому измерителем рассогласования 1. При подходе наводимого объекта к предельному рабочему углу срабатывает соответствующий (например, нижний) концевой выключатель ограничителя углов 13. Сигнал с ограничителя углов поступает на второй вход фазочувствительного ограничителя 14, первый вход коммутатора фазы 3 и второй вход устройства токоограничения 16. Фазочувствительный ограничитель по сигналу ограничителя углов 12 ограничивает по амплитуде входной управляющий сигнал, соответствующий движению наводимого объекта в сторону механического упора до величины, необходимой для протекания через исполнительное устройство (например, электродвигатель) исполнительного привода 6 тока, достаточного для компенсации момента неуравновешенности объекта. Это ограничивает скорость приближения к механическому упору, но в то же время сохраняет возможность наведения объекта в зоне углов между концевым выключателем ограничителя углов и механическим упором. При изменении фазы входного управляющего сигнала, то есть при выведении наводимого объекта из зоны ограничения углов, сигнал рассогласования не ограничивается. Коммутатор фазы 3 по сигналу ограничителя углов дополнительно подключает к входу сумматора 4 полный сигнал обратной связи по скорости наводимого объекта, что способствует торможению последнего в зоне ограничения при движении в сторону механического упора. При движении в обратную от упора сторону коммутатор фазы не пропускает дополнительный сигнал обратной связи по скорости, и наведение объекта в зоне между механическим упором и концевым выключателем ограничителя углов осуществляется так же, как и в рабочей зоне. Устройство токограничения 16 осуществляет ограничение сигнала на входе усилителя мощности 5 только при срабатывании концевого выключателя ограничителя углов 13 и наличии на выходе датчика тока 15 напряжения, превышающего напряжение, соответствующее протеканию через исполнительное устройство исполнительного привода 6 номинального тока, то есть при достижении наводимым объектом жесткого упора. Таким образом, зона рабочих углов расширяется и осуществляется защита исполнительного устройства исполнительного привода при достижении объектом жесткого упора.
Рассмотрим процесс движения объекта в районе верхнего механического упора (см. фиг.3). Допустим, что при движении объекта вверх полярность сигнала датчика скорости 8 отрицательная. После срабатывания верхнего концевого выключателя ограничителя углов напряжение питания + 27 В (борт сеть) поступает на реле К2.1 и через диод V3 на реле К3.1. Контакты К2.2 размыкаются, контакты К3.2 замыкаются. Сигнал с датчика скорости через нормально замкнутые контакты К1.2, диод V2, контакты К3.2 поступает на сумматор 4 и, вычитаясь из сигнала рассогласования, формирует сигнал торможения, пропорциональный скорости движения объекта к упору. Происходит торможение объекта. При наведении объекта в сторону от механического упора (напряжение с концевого выключателя ограничителя углов верхнего упора продолжает поступать) полярность сигнала датчика скорости 8 меняется на положительную. Прохождению сигнала положительной полярности на сумматор будет препятствовать диод V2, и сигнала торможения не будет.
Ограничение сигнала рассогласования на верхнем механическом упоре происходит следующим образом (см. фиг.4). Допустим, что при движении объекта вверх полярность сигнала на выходе усилителя положительная. После срабатывания концевого выключателя ограничителя углов верхнего упора напряжение питания +27 В (борт сеть) поступает на реле К2.1. Контакты К2.2 замыкаются. Сигнал рассогласования положительной полярности через диод V3 поступает на стабилитрон V4 и ограничивается до напряжения стабилизации стабилитрона. При наведении объекта в сторону от механического упора полярность сигнала рассогласования изменяется на противоположную. Прохождению сигнала отрицательной полярности на стабилитрон V4 будет препятствовать диод V3, то есть ограничения сигнала рассогласования не будет. Величина ограничения производится выбором величины резистора R1 и типом стабилитронов.
Процесс токоограничения на верхнем механическом упоре происходит следующим образом (см. фиг.5). Напряжение, пропорциональное току, протекающему через электродвигатель исполнительного привода, с датчика тока поступает на буферный дифференциальный масштабирующий усилитель 17. Отмасштабированный сигнал токовой обратной связи поступает на прецизионный выпрямитель 18, где выделяется его модуль. Модуль сигнала обратной связи по току поступает на интегратор 19, на второй вход которого поступает напряжение уставки, соответствующее номинальному току, протекающему через электродвигатель исполнительного привода 6. С выхода интегратора сигнал поступает на компаратор 20 и далее на ключ V1, связанный с сумматором.
В случае если ток электродвигателя не превышает номинального, на выходе интегратора присутствует отрицательное напряжение, ключ V1 закрыт. При превышении электродвигателем номинального тока на выходе интегратора происходит нарастание выходного напряжения с определенной постоянной времени. При переходе выходного напряжения через ноль компаратор переходит в другое устойчивое состояние, открывая ключ V1, который, в свою очередь, ограничивает сигнал с выхода сумматора. При уменьшении тока электродвигателя исполнительного привода, то есть при снятии объекта с жесткого упора, на выходе интегратора формируется отрицательный потенциал, закрывающий ключ V1. Режим токоограничения снимается. При подходе объекта наведения к нижнему механическому упору формирование сигнала торможения, токоограничение, включение и отключение ограничения сигнала рассогласования происходит аналогичным образом.
Таким образом, при срабатывании концевого выключателя ограничителя углов 13 происходит ограничение амплитуды сигнала рассогласования, соответствующего движению наводимого объекта в сторону механического упора, формируется сигнал торможения, пропорциональный скорости движения объекта к механическому упору и осуществляется ограничение сигнала на входе усилителя мощности 5 при достижении объектом механического упора. При движении наводимого объекта в противоположную от механического упора сторону ограничение сигнала рассогласования снимается, а сигнал торможения отключается. Тем самым при входе в зону ограничения обеспечивается гарантированное торможение наводимого объекта, исключающее удар о жесткий механический упор, исключается перегрев электродвигателя исполнительного привода 6 и в то же время сохраняется возможность управления объектом в зоне ограничения. Процесс плавного наведения в противоположную от механического упора сторону осуществляется во всем диапазоне углов, в том числе и в зоне ограничения.
Предложенное техническое решение проверено электронным моделированием, а также экспериментально на макете следящей системы наведения. Результаты проверки подтверждают отсутствие удара наводимого объекта о механический упор, отсутствие перегрева электродвигателя, возможность плавного наведения объекта во всем диапазоне углов.
При практической реализации предложенного изобретения могут быть использованы известные схемные решения сумматора в цифровом, аналоговом или цифроаналоговом виде.
В качестве исполнительного привода могут быть использованы электродвигатели постоянного или переменного тока с редуктором либо гидроприводы.
В качестве усилителя мощности могут быть использованы электромашинные, полупроводниковые или гидравлические усилители.
В качестве измерителя рассогласования могут быть использованы ЭВМ, блоки обработки, содержащие ЭВМ, гироскопические устройства, аналоговые устройства измерения рассогласования, например вращающиеся трансформаторы, а также их сочетания и другие известные схемные решения.
В качестве усилителя могут быть использованы аналоговые, цифровые и цифроаналоговые блоки обработки входных сигналов.
В качестве датчика скорости могут быть использованы тахогенераторы постоянного и переменного тока, импульсные датчики скорости, оптоэлектронные датчики вращения, гиротахометры.
В качестве датчика положения могут быть использованы потенциометры, вращающиеся трансформаторы, сельсины, цифровые датчики угла.
В качестве ограничителя углов может быть использован датчик положения в совокупности с пороговым устройством (в частности, датчик угла в совокупности с ЭВМ), а также блок механических, индукционных, емкостных, оптоэлектронных и других датчиков.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система наведения | 2023 |
|
RU2815295C1 |
| КОРАБЕЛЬНАЯ СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ | 2000 |
|
RU2165063C1 |
| Следящий привод наведения | 2024 |
|
RU2835471C1 |
| Следящая система для управления гелиостатом | 1981 |
|
SU964575A1 |
| СЛЕДЯЩИЙ ПРИВОД | 2017 |
|
RU2664866C1 |
| Следящая система | 1973 |
|
SU533912A1 |
| Устройство для управления наведением телескопа | 1974 |
|
SU560213A1 |
| Следящий электропривод | 1991 |
|
SU1833828A1 |
| СИСТЕМА УПРАВЛЕНИЯ АНТЕННОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 1991 |
|
RU2024907C1 |
| Электропривод переменного тока | 1986 |
|
SU1332506A1 |
Изобретение относится к системам автоматического управления, а именно к следящим системам наведения объектов с ограниченным углом поворота, и может быть использовано в системах наведения мобильных робототехнических комплексов, самоходных артиллерийских установок, пусковых установок ракетных и ракетно-пушечных комплексов. Следящая система наведения содержит исполнительный привод, усилитель мощности, ограничитель углов, датчик тока, вход которого соединен с выходом усилителя мощности. В систему введены измеритель рассогласования, усилитель, сумматор, датчик скорости и масштабирующее устройство. Датчик положения механически связан с наводимым объектом, а исполнительный привод - с входами наводимого объекта и датчика скорости. Технический результат заключается в повышении надежности следящей системы наведения за счет исключения удара наводимого объекта о механический упор. 5 ил.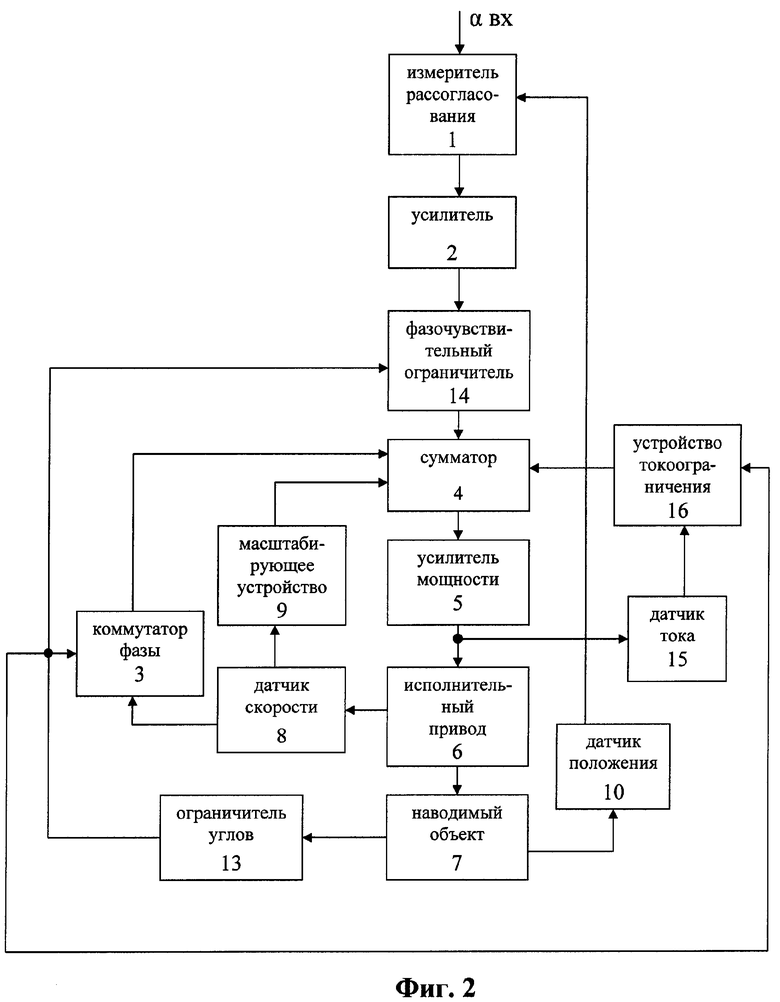
Следящая система наведения, содержащая исполнительный привод, усилитель мощности, датчик тока, вход которого соединен с выходом усилителя мощности, ограничитель углов, связанный с наводимым объектом, отличающаяся тем, что в нее введены измеритель рассогласования, усилитель, сумматор, датчик скорости, масштабирующее устройство, датчик положения, механически связанный с наводимым объектом, коммутатор фазы, фазочувствительный ограничитель и устройство токоограничения, при этом вход измерителя рассогласования является входом следящей системы, а выход соединен с входом усилителя, сумматор, усилитель мощности и исполнительный привод соединены последовательно, исполнительный привод механически связан с входами наводимого объекта и датчика скорости, электрический выход датчика скорости соединен с первым входом сумматора через масштабирующее устройство, выход датчика положения соединен со вторым входом измерителя рассогласования, первый вход коммутатора фазы соединен с выходом ограничителя углов, а выход - со вторым входом сумматора, первый вход фазочувствительного ограничителя соединен с выходом усилителя, второй вход - с выходом ограничителя углов, а выход - с третьим входом сумматора, первый вход устройства токоограничения соединен с выходом датчика тока, второй вход - с выходом ограничителя углов, а выход - с четвертым входом сумматора, второй вход коммутатора фазы соединен с выходом датчика скорости.
| Воздухораспределительное устройство для автоматических воздушных тормозов | 1926 |
|
SU6610A1 |
| СЛЕДЯЩАЯ НАБЛЮДАТЕЛЬНАЯ СИСТЕМА | 2001 |
|
RU2211473C2 |
| СИСТЕМА СТАБИЛИЗАЦИИ И НАВЕДЕНИЯ ОБЪЕКТА | 1991 |
|
RU2107248C1 |
| US 5317319 A, 31.05.1994. | |||

