Изобретение относится к области систем автоматического управления, в частности к системам наведения артиллерийского и ракетного вооружения, и может быть использовано в электрических приводах наведения вооружения артиллерийских орудий, пусковых установок ракетных комплексов и реактивных систем залпового огня, в которых в качестве усилителя мощности используется электромашинный усилитель поперечного поля.
Известна электромашинная следящая система (Блейз Е.С., Семенов Ю.Н., Чемоданов Б.К., Якименко Н.М. Динамика электромашинных следящих систем. - М.: Энергия, 1967. - 408 с., рис. 1-2).
Недостатком данной системы управления является отсутствие в ней стабилизирующих обратных связей по скорости и ускорению исполнительного двигателя, что не позволяет достичь высокого быстродействия.
Наиболее близким устройством того же назначения к заявленному изобретению по совокупности признаков является электромашинный следящий привод (Следящие приводы. В 2-х кн. / Под ред. Б.К. Чемоданова. Книга вторая. - М.: Энергия, 1976 г. - 384 с., рис. 9-1), принятый за прототип.
Это устройство содержит измеритель рассогласования, реализованный на синусно-косинусных вращающихся трансформаторах, первый вход которого является входом электромашинного следящего привода, а второй вход механически связан с объектом регулирования, электронный усилитель, первый вход которого соединен с выходом измерителя рассогласования, электромашинный усилитель, первые выводы первой и второй обмоток управления которого соединены между собой и соединены с третьим выходом электронного усилителя, исполнительный двигатель постоянного тока, первый вывод якоря которого соединен с первой продольной щеткой якоря генератора электромашинного усилителя, а выход механически связан с объектом регулирования, сериесное сопротивление, первый вывод которого соединен со вторым выводом якоря исполнительного двигателя постоянного тока, а второй вывод соединен со второй продольной щеткой якоря генератора электромашинного усилителя, тахогенератор постоянного тока, вход которого механически связан с выходом исполнительного двигателя постоянного тока, первый резистор, первый вывод которого соединен с выходом тахогенерато-ра постоянного тока, второй резистор, первый вывод которого соединен со вторым выводом первого резистора, а второй вывод соединен с первым выводом сериесного сопротивления, корректирующее устройство, вход которого соединен со вторым выводом первого резистора, а выход соединен со вторым входом электронного усилителя, вторые выводы первой и второй обмоток управления электромашинного усилителя соединены соответственно с первым и вторым выходами электронного усилителя.
Использование в данном следящем приводе тахогенератора постоянного тока снижает его надежность. Кроме того, для обеспечения устойчивой работы контура стабилизирующей обратной связи по скорости исполнительного двигателя необходимо обеспечить безлюфтовое соединение валов исполнительного двигателя и тахогенератора, что существенно усложняет конструкцию механических связей.
Еще одним недостатком данного следящего привода является невысокая точность отработки заданных углов наведения при наличии на валу объекта регулирования моментов сопротивления движению (момента неуравновешенности, момента трения, ветрового момента).
Задачей предлагаемого изобретения является повышение точности и надежности устройства.
Сущность технического решения заключается в следующем. Наведение артиллерийского и ракетного вооружения в современных объектах военной техники осуществляется следящими приводами наведения, работающими в автоматическом режиме. При работе в этом режиме измеритель рассогласования из состава следящего привода наведения вырабатывает сигнал рассогласования, пропорциональный отклонению объекта регулирования от заданного угла наведения. Сигнал рассогласования подается на электронный усилитель, вырабатывающий сигнал управления следящим приводом наведения. В электронном усилителе сигнал рассогласования корректируется и суммируется с сигналами обратных связей, в качестве которых чаще всего используются сигналы скорости и тока исполнительного двигателя. Выработанный электронным усилителем сигнал управления следящим приводом наведения поступает на вход усилителя мощности, усиливающим его по напряжению и току до уровня, необходимого для управления исполнительным двигателем, приводящим в движение объект регулирования в направлении уменьшения его отклонения от заданного угла наведения.
В качестве исполнительных двигателей следящих приводов наведения среди прочих типов двигателей находят применение двигатели постоянного тока, для управления которыми в качестве усилителя мощности используются электромашинные усилители поперечного поля. При этом в качестве сигнала обратной связи по скорости вала исполнительного двигателя возможно использование напряжения, снимаемого с продольной щетки якоря генератора электромашинного усилителя (Патент на изобретение РФ №2767023 МПК F41G 5/06. Заявлено 22.03.2021. Опубл. 16.03.2022). Использование напряжения, снимаемого с продольной щетки якоря генератора электромашинного усилителя, вместо использования тахогенератора постоянного тока позволяет повысить надежность следящего привода наведения.
При действии на объект регулирования моментов сопротивления движению (например, момента неуравновешенности, момента трения, ветрового момента) в устройстве, принятом за прототип, будет иметь место статическая ошибка отработки заданного угла наведения, величина которой пропорциональна суммарному моменту сопротивления движению. Для устранения этой статической ошибки необходимо введение в схему выработки сигнала управления следящим приводом наведения сигнала интеграла рассогласования. Однако постоянное использование сигнала интеграла рассогласования при выработке сигнала управления следящим приводом наведения может приводить к увеличению перерегулирования и времени отработки изменяющихся скачком заданных углов наведения. В связи с этим сигнал интеграла рассогласования должен применяться для выработки сигнала управления следящим приводом наведения только в зоне малых рассогласований, либо в зоне малых скоростей исполнительного двигателя, характерных для подхода объекта регулирования к заданному углу наведения, когда одного сигнала рассогласования недостаточно для продолжения движения объекта регулирования. При переменном характере суммарного момента сопротивления движению объекта регулирования в зависимости от текущего угла наведения объекта регулирования, изменяющихся условий окружающей среды, управление подключением сигнала интегратора к выработке сигнала управления следящим приводом наведения в зависимости от скорости вала исполнительного двигателя обеспечивает более стабильные характеристики следящего привода наведения при отработке заданных углов наведения по сравнению с управлением подключением сигнала интегратора в зависимости от величины рассогласования.
Указанный технический результат при осуществлении изобретения достигается тем, что в следящий привод наведения, содержащий измеритель рассогласования, первый вход которого является входом следящего привода, а второй вход механически связан с объектом регулирования, электронный усилитель, электромашинный усилитель, первые выводы первой и второй обмоток управления которого соединены между собой и соединены с третьим выходом электронного усилителя, вторые выводы первой и второй обмоток управления соединены соответственно с первым и вторым выходами электронного усилителя, исполнительный двигатель постоянного тока, первый вывод якоря которого соединен с первой продольной щеткой якоря генератора электромашинного усилителя, а выход механически связан с объектом регулирования, введены дифференциальный усилитель, первый вход которого соединен с первой продольной щеткой якоря генератора электромашинного усилителя, второй вход соединен с поперечной щеткой якоря генератора электромашинного усилителя, пороговое устройство, вход которого соединен с выходом дифференциального усилителя, блок коммутации, первый вход которого соединен с выходом измерителя рассогласования, третий управляющий вход соединен с выходом порогового устройства, интегратор, вход которого соединен с выходом блока коммутации, а выход соединен со вторым входом блока коммутации, сумматор, первый вход которого соединен с выходом измерителя рассогласования, второй вход соединен с выходом интегратора, третий вход соединен с выходом дифференциального усилителя, а выход соединен с входом электронного усилителя, второй вывод якоря исполнительного двигателя постоянного тока соединен со второй продольной щеткой якоря генератора электромашинного усилителя.
В заявленном устройстве повышение точности и надежности следящего привода наведения обеспечивается благодаря исключению тахогенератора постоянного тока и изменению его схемы с применением дифференциального усилителя, порогового устройства, блока коммутации, интегратора, сумматора.
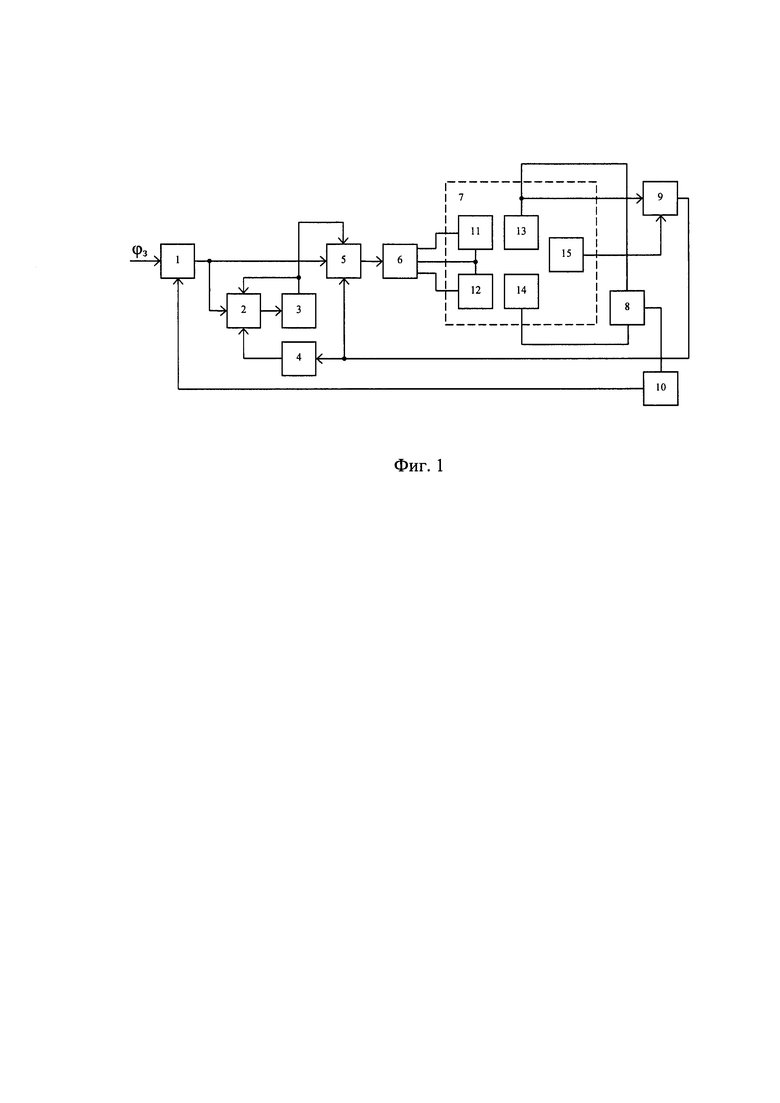
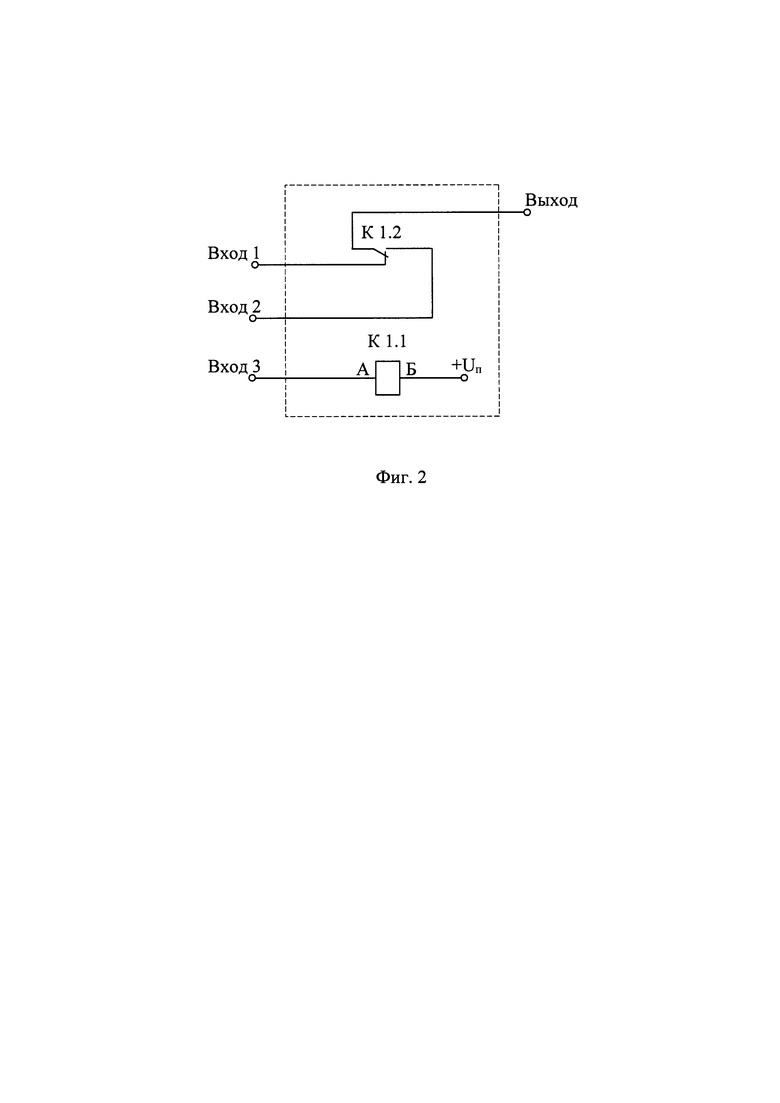
На фиг. 1 приведена схема заявленного устройства, на фиг. 2 - пример схемы блока коммутации.
На фиг. 1 приняты следующие обозначения:
ϕ3 - заданный угол наведения;
1 - измеритель рассогласования;
2 - блок коммутации;
3 - интегратор;
4 - пороговое устройство;
5 - сумматор;
6 - электронный усилитель;
7 - электромашинный усилитель;
8 - исполнительный двигатель постоянного тока;
9 - дифференциальный усилитель;
10 - объект регулирования;
11 - первая обмотка управления электромашинного усилителя;
12 - вторая обмотка управления электромашинного усилителя;
13 - первая продольная щетка якоря генератора электромашинного усилителя;
14 - вторая продольная щетка якоря генератора электромашинного усилителя;
15 - поперечная щетка якоря генератора электромашинного усилителя.
Сведения, подтверждающие возможность осуществления изобретения с получением указанного выше технического результата, заключаются в следующем.
Следящий привод наведения (фиг. 1) содержит измеритель рассогласования 1, блок коммутации 2, интегратор 3, пороговое устройство 4, сумматор 5, электронный усилитель 6, электромашинный усилитель 7, исполнительный двигатель постоянного тока 8, дифференциальный усилитель 9, объект регулирования 10.
Первый вход измерителя рассогласования 1 является входом следящего привода наведения. Второй вход измерителя рассогласования 1 механически связан с объектом регулирования 10. Первый и второй входы блока коммутации 2 соединены соответственно с выходом измерителя рассогласования 1 и с выходом интегратора 3. Третий управляющий вход блока коммутации 2 соединен с выходом порогового устройства 4. Вход интегратора 3 соединен с выходом блока коммутации 2. Первый, второй и третий входы сумматора 5 соединены соответственно с выходом измерителя рассогласования 1, с выходом интегратора 3 и с выходом дифференциального усилителя 9. Вход электронного усилителя 6 соединен с выходом сумматора 5. Первые выводы первой 11 и второй 12 обмоток управления электромашинного усилителя 7 соединены между собой и с третьим выходом электронного усилителя 6. Вторые выводы первой 11 и второй 12 обмоток управления электромашинного усилителя 7 соединены соответственно с первым и вторым выходами электронного усилителя 6. Первый и второй выводы якоря исполнительного двигателя постоянного тока 8 соединены соответственно с первой 13 и второй 14 продольными щетками якоря генератора электромашинного усилителя 7. Выход исполнительного двигателя постоянного тока 8 механически связан с объектом регулирования 10. Первый и второй входы дифференциального усилителя 9 соединены соответственно с первой продольной щеткой 13 и с поперечной щеткой 15 якоря генератора электромашинного усилителя 7, а выход соединен с входом порогового устройства 4.
Следящий привод наведения работает следующим образом.
При изменении на первом входе измерителя рассогласования 1 заданного угла наведения ϕ3 (фиг.1) на его выходе формируется сигнал рассогласования, пропорциональный отклонению объекта регулирования 10 от заданного угла наведения. Сигнал рассогласования поступает на первый вход блока коммутации 2 и первый вход сумматора 5. При наличии на третьем управляющем входе блока коммутации 2 сигнала логического нуля сигнал с его первого входа поступает на его выход и далее на вход интегратора 3. На выходе интегратора 3 вырабатывается сигнал интеграла рассогласования, который поступает на второй вход сумматора 5. На сумматоре 5 сигналы рассогласования и интеграла рассогласования суммируются с сигналом, вырабатываемым дифференциальным усилителем 9, представляющим собой сигнал обратной связи по напряжению, снимаемому с поперечной щетки 15 якоря генератора электромашинного усилителя 7 и пропорциональному скорости вала исполнительного двигателя постоянного тока 8. Суммарный сигнал с выхода сумматора 5 подается на электронный усилитель 6, усиливающий его по напряжению и току до уровня, достаточного для управления электромашинным усилителем 7. Напряжение между первым и третьим выходами электронного усилителя 6, а также напряжение между вторым и третьим выходами электронного усилителя 6, прикладываемые соответственно к первой 11 и второй 12 обмоткам управления электромашинного усилителя 7 вызывают напряжение на первой 13 и второй 14 продольных щетках якоря генератора электромашинного усилителя 7, под действием которого исполнительный двигатель постоянного тока 8 перемещает объект регулирования 10 в сторону уменьшения абсолютной величины сигнала рассогласования.
При отработке больших начальных рассогласований исполнительный двигатель постоянного тока 8 перемещает объект регулирования 10 с высокой угловой скоростью. При этом величина сигнала на выходе дифференциального усилителя 9 превышает порог срабатывания порогового устройства 4. На выходе порогового устройства 4 устанавливается сигнал логической единицы, который поступает на третий управляющий вход блока коммутации 2. По этому сигналу блок коммутации 2 отключает вход интегратора 3 от выхода измерителя рассогласования 2 и соединяет вход и выход интегратора 3. Выходной сигнал интегратора 3 при этом обнуляется.
По мере уменьшения величины рассогласования в процессе его отработки следящим приводом наведения уменьшается угловая скорость вала исполнительного двигателя постоянного тока 8 и соответственно уменьшается сигнал на выходе дифференциального усилителя 9. Уменьшение сигнала на выходе дифференциального усилителя 9 до величины ниже порога срабатывания порогового устройства 4 приводит к установлению на его выходе сигнала логического нуля, по которому блок коммутации 2 разъединяет вход и выход интегратора 3 и соединяет вход интегратора 3 с выходом измерителя рассогласования 1. На выходе интегратора 3 вырабатывается сигнал, пропорциональный интегралу сигнала рассогласования. Включение интегратора 3 при подходе объекта регулирования 10 к заданному углу наведения обеспечивает высокую точность наведения.
В предлагаемом изобретении при практической реализации могут быть использованы известные схемные реализации интегратора, сумматора, дифференциального усилителя, порогового устройства, электронного усилителя.
В качестве блока коммутации могут быть использованы реле, аналоговые ключи и коммутаторы, а также другие известные схемные реализации. В качестве примера на фиг. 2 изображена схема блока коммутации, реализованного на реле.
В качестве измерителя рассогласования могут быть использованы измерители рассогласования, реализованные с использованием индукционных, емкостных, потенциометрических, цифровых датчиков угла, с использованием перечисленных выше датчиков, гироскопических датчиков угла и систем совместно с счетно-решающими приборами, ЭВМ, блоками обработки, содержащими ЭВМ, а также другие известные схемные реализации.
В качестве электромашинного усилителя могут быть использованы электромашинные усилители поперечного поля.
В качестве исполнительного двигателя постоянного тока могут быть использованы двигатели постоянного тока с независимым возбуждением и возбуждением от постоянных магнитов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕДЯЩАЯ СИСТЕМА НАВЕДЕНИЯ | 2006 |
|
RU2347172C2 |
| Привод наведения | 2021 |
|
RU2767023C1 |
| СИСТЕМА УПРАВЛЕНИЯ НАВЕДЕНИЕМ ИНЕРЦИОННОГО ОБЪЕКТА | 2002 |
|
RU2225633C1 |
| СИСТЕМА УПРАВЛЕНИЯ НАВЕДЕНИЕМ ИНЕРЦИОННОГО ОБЪЕКТА | 2014 |
|
RU2537256C1 |
| Система управления наведением инерционного объекта | 2022 |
|
RU2795844C1 |
| Система автоматического сопровождения цели | 2023 |
|
RU2803285C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД С ТОРМОЗНЫМ УСТРОЙСТВОМ | 1992 |
|
RU2066873C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
| Следящая система наведения | 2023 |
|
RU2815295C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД С ТОРМОЗНЫМ УСТРОЙСТВОМ | 1992 |
|
RU2067310C1 |
Изобретение относится к следящим приводам наведения артиллерийского и ракетного вооружения. Сущность: следящий привод наведения содержит измеритель (1) рассогласования, блок (2) коммутации, интегратор (3), пороговое устройство (4), сумматор (5), электронный усилитель (6), электромашинный усилитель (7), исполнительный двигатель (8) постоянного тока, дифференциальный усилитель (9). Электромашинный усилитель (7) содержит первую обмотку (11) управления, вторую обмотку (12) управления, первую продольную щетку (13) якоря генератора, вторую продольную щетку (14) якоря генератора и поперечную щетку (15) якоря генератора. Технический результат: повышение точности наведения. 2 ил.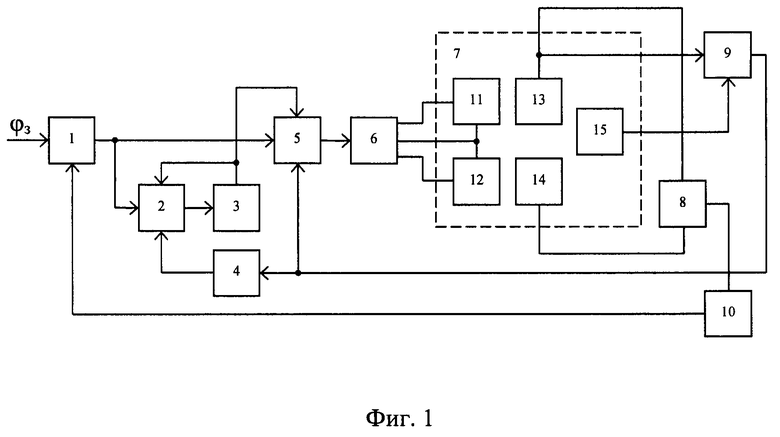
Следящий привод наведения, содержащий измеритель рассогласования, первый вход которого является входом следящего привода, а второй вход механически связан с объектом регулирования, электронный усилитель, электромашинный усилитель, первые выводы первой и второй обмоток управления которого соединены между собой и соединены с третьим выходом электронного усилителя, вторые выводы первой и второй обмоток управления соединены соответственно с первым и вторым выходами электронного усилителя, исполнительный двигатель постоянного тока, первый вывод якоря которого соединен с первой продольной щеткой якоря генератора электромашинного усилителя, а выход механически связан с объектом регулирования, отличающийся тем, что в него введены дифференциальный усилитель, первый вход которого соединен с первой продольной щеткой якоря генератора электромашинного усилителя, второй вход соединен с поперечной щеткой якоря генератора электромашинного усилителя, пороговое устройство, вход которого соединен с выходом дифференциального усилителя, блок коммутации, первый вход которого соединен с выходом измерителя рассогласования, третий управляющий вход соединен с выходом порогового устройства, интегратор, вход которого соединен с выходом блока коммутации, а выход соединен со вторым входом блока коммутации, сумматор, первый вход которого соединен с выходом измерителя рассогласования, второй вход соединен с выходом интегратора, третий вход соединен с выходом дифференциального усилителя, а выход соединен с входом электронного усилителя, второй вывод якоря исполнительного двигателя постоянного тока соединен со второй продольной щеткой якоря генератора электромашинного усилителя.
| Привод наведения | 2021 |
|
RU2767023C1 |
| Следящий привод | 2019 |
|
RU2723331C1 |
| Бункер | 1940 |
|
SU60908A1 |

