ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001]
Данное изобретение относится к конвейеру для транспортировки транспортируемых объектов вдоль пути транспортировки, включающего в себя прямолинейные участки пути и криволинейные участки пути, соединенные с прямолинейными участками пути.
УРОВЕНЬ ТЕХНИКИ
[0002]
Как описано в японском патенте № 5168794, известный конвейер для транспортировки транспортируемых объектов обычно предусматривает наличие пути транспортировки, включающего в себя прямолинейный участок пути для линейного направления транспортируемого объекта, криволинейный участок пути, чтобы вызвать отвод транспортируемого объекта с прямолинейного участка пути, и секцию ответвления, имеющую прямолинейный участок пути и криволинейный участок пути. По мере необходимости, прямолинейный участок пути, криволинейный участок пути и секцию ответвления объединяют.
[0003]
Конвейер согласно японском патенту № 5168794 применяют, когда используемые в ходе процесса изделия транспортируют в соответствии с процессом изготовления на заводе-изготовителе полупроводников и панелей жидкокристаллических индикаторов, либо когда багаж пассажиров, груз или аналогичные предметы транспортируют к воздушным судам с помощью сортировочного оборудования, предназначенного для сортировки багажа пассажиров, груза или аналогичных предметов в аэропорту.
Конвейер, предусмотренный для сортировочного оборудования в аэропорту, транспортирует поддоны (транспортируемые объекты), на которых лежит ручная кладь и груз, к желаемому воздушному судну. При транспортировке, в частности, грузов конвейером для сортировочного оборудования в аэропорту, несколько грузов, подлежащих транспортировке, следует размещать на одном поддоне. Поэтому в качестве поддона для размещения груза используют поддон с нагружаемой грузом частью (нагружаемой поверхностью), простирающейся в направлении транспортировки поддона.
[0004]
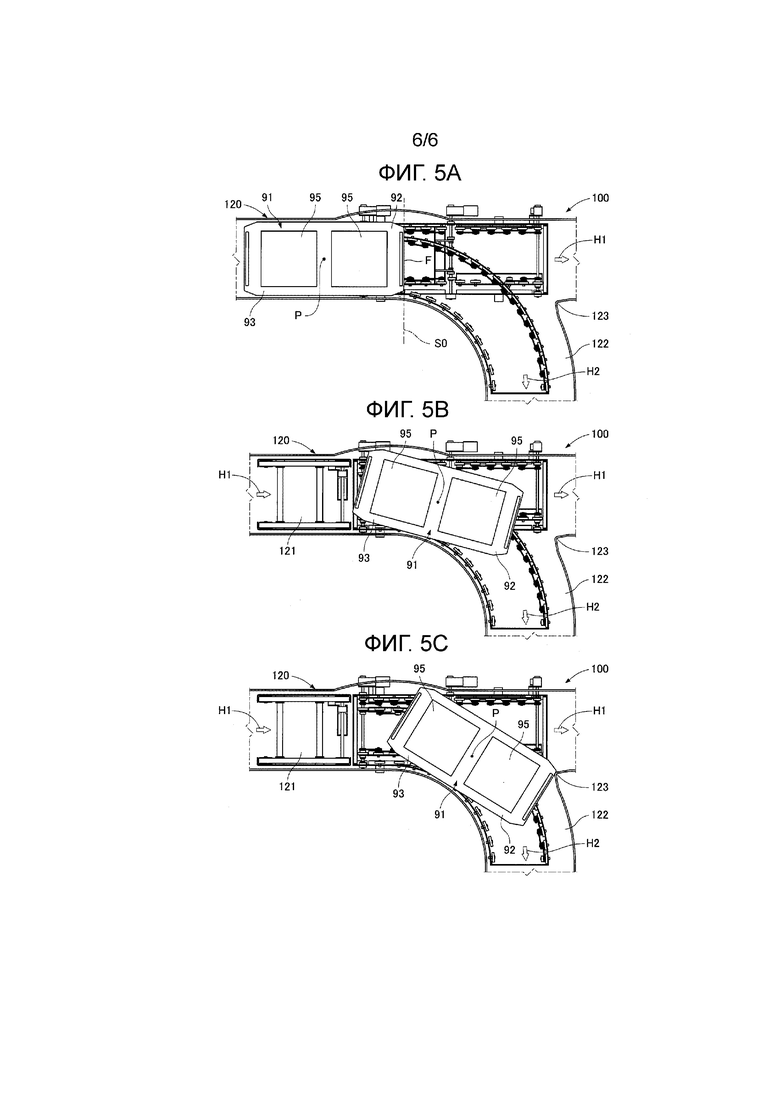
Как изображено на фиг.5A—5C, когда конвейер 100 согласно известному техническому решению, описанному в японском патенте №. 5168794, транспортирует грузы 95 путем использования длинного поддона 91, проходящего так, как говорилось, предусматривается поворот направлений транспортировки поддона 91 с размещенными на нем грузами 95 от прямолинейного участка 121 пути к криволинейному участку 122 пути. В этом случае, как изображено на фиг.5A, передний конец F поддона 91 транспортируется в исходное положение S0 криволинейного участка 122 пути на пути 120 транспортировки. Как изображено на фиг.5B, когда передняя - по отношению к направлению транспортировки поддона 91 - полуобласть поддона 91 (которая далее будет именоваться «передней половиной 92 поддона 91») направляется на криволинейный участок 122 пути, задняя полуобласть поддона 91 (которая далее будет именоваться «задней половиной 93 поддона 91») движется влево (в направлении, проходящем напротив криволинейного участка 122 пути (направления H2 транспортировки поддона 91 на криволинейном участке 122 пути)) по отношению к направлению H1 транспортировки поддона 91 по прямолинейному участку 121 пути за счет силы, прикладываемой для направления передней половины 92 поддона 91 на криволинейный участок 122 пути конвейером 100. Иными словами, когда передняя половина 92 поддона 91 изменяет ориентацию от обеспечивающей транспортировку на прямолинейный участок 121 пути к ориентации, соответствующей транспортировке на криволинейный участок 122 пути, задняя половина 93 поддона 91 соответственно изменяет ориентацию от обеспечивающей транспортировку на прямолинейный участок 121 пути к ориентации, обеспечивающей транспортировку на криволинейный участок 122 пути.
[0005]
Вместе с тем, когда в конвейере 100 согласно известному техническому решению используют длинный поддон 91 для транспортировки грузов 95, нагрузка, прикладываемая к поддону 91, может смещаться в заднюю часть поддона 91, то есть, в зависимости от положения, габаритов и количества грузов 95, размещенных на поддоне 91, возможно приложение направленной назад нагрузки. Как изображено на фиг.5C, когда поддон 91 с направленной назад нагрузкой транспортируется конвейером 100 согласно известному техническому решению, при транспортировке поддона 91 с прямолинейного участка 121 пути на криволинейный участок 122 пути возрастает сопротивление относительному скольжению задней половины 93 поддона 91. Это нарушает баланс между силой, прикладываемой для осуществления поворота передней половины 92 поддона 91 на криволинейный участок 122 пути, и силой, прикладываемой для осуществления скольжения задней половины 93 поддона 91 влево по отношению к направлению H1 транспортировки поддона 91. Таким образом, задняя половина 93 поддона 91 не может осуществить изменение ориентации на обеспечивающую транспортировку на криволинейный участок 122 пути, когда передняя половина 92 поддона 91 изменяет ориентацию на обеспечивающую транспортировку на криволинейный участок 122 пути, так что поддон 91 с направленной назад нагрузкой не сможет полностью совершить поворот на криволинейный участок 122 пути, а передняя половина 92 поддона 91 может столкнуться с угловой направляющей 123.
[0006]
Таким образом, задача данного изобретения состоит в том, чтобы разработать конвейер, выполненный с возможностью транспортировки транспортируемого объекта с прямолинейного участка пути на криволинейный участок пути даже в случае, если нагрузка, прикладываемая к транспортируемому объекту, смещается к задней стороне транспортируемого объекта, то есть, если к транспортируемому объекту прикладывается направленная назад нагрузка.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0007]
Ниже будет описано решение технической задачи данного изобретения.
Конвейер в соответствии с данным изобретением представляет собой конвейер для транспортировки транспортируемого объекта вдоль пути транспортировки, включающего в себя прямолинейный участок пути и криволинейный участок пути, соединенный с прямолинейным участком пути, причем конвейер включает в себя способствующий ориентации элемент, конфигурация которого позволяет способствовать изменению ориентации при транспортировке транспортируемого объекта, когда транспортируемый объект транспортируется с прямолинейного участка пути на криволинейный участок пути, при этом способствующий ориентации элемент предусмотрен на прямолинейном участке пути на стороне, находящейся выше по ходу транспортировки от исходного положения криволинейного участка пути на пути транспортировки.
В этой конфигурации, когда транспортируемый объект транспортируется с прямолинейного участка пути на криволинейный участок пути, способствующий ориентации элемент способствует изменению ориентации при транспортировке транспортируемого объекта (изменению ориентации при транспортировке от ориентации, обеспечивающей транспортировку на прямолинейный участок пути, к ориентации, обеспечивающей транспортировку на криволинейный участок пути), на прямолинейном участке пути на стороне, находящейсявыше по ходу транспортировки от исходного положения криволинейного участка пути на пути транспортировки.
В этом случае, термин «криволинейный участок пути, соединенный с прямолинейным участком пути», означает криволинейный участок пути, продолжающийся от одного конца прямолинейного участка пути (криволинейный участок пути, образующий угол пути транспортировки), причем криволинейный участок пути ответвляется от одной стороны прямолинейного участка пути (криволинейный участок пути образует секцию ответвления пути транспортировки), и при этом криволинейный участок пути соединяет одну сторону прямолинейного участка пути (при этом криволинейный участок пути образует соединение пути транспортировки). Более того, выражение «изменение ориентации при транспортировке транспортируемого объекта во время транспортировки транспортируемого объекта с прямолинейного участка пути на криволинейный участок пути» означает изменение ориентации при транспортировке транспортируемого объекта от ориентации, обеспечивающей транспортировку на прямолинейный участок пути, к ориентации, обеспечивающей транспортировку на криволинейный участок пути.
[0008]
Помимо этого, способствующий ориентации элемент предусмотрен в предварительно определенном диапазоне около некоторого положения на прямолинейном участке пути, причем это положение отделено некоторым предварительно определенным расстоянием на стороне, находящейся выше по ходу транспортировки от исходного положения криволинейного участка пути на пути транспортировки, а упомянутое предварительно определенное расстояние представляет собой расстояние, соответствующее четверти длины транспортируемого объекта в направлении транспортировки.
В этой конфигурации, когда центр транспортируемого объекта транспортируется в исходное положение криволинейного участка пути на пути транспортировки, способствующий ориентации элемент способствует изменению ориентации при транспортировке транспортируемого объекта таким образом, что ориентация при транспортировке задней половины транспортируемого объекта по отношению к направлению транспортировки транспортируемого объекта изменяется от ориентации, обеспечивающей транспортировку на прямолинейный участок пути, к ориентации, обеспечивающей транспортировку на криволинейный участок пути.
[0009]
Помимо этого, способствующий ориентации элемент включает в себя вращающееся тело, а это вращающееся тело, будучи выполненным с возможностью свободного изменения направления вращения в соответствии с изменением ориентации при транспортировке объекта, транспортируемого на криволинейный участок пути, способствует изменению ориентации при транспортировке транспортируемого объекта во время транспортировки транспортируемого объекта на криволинейный участок пути.
В этой конфигурации, способствующий ориентации элемент изменяет направление вращения вращающегося тела в соответствии с изменением ориентации при транспортировке объекта, транспортируемого на криволинейный участок пути, так, что способствует изменению ориентации при транспортировке транспортируемого объекта таким образом, что ориентация при транспортировке транспортируемого объекта изменяется от ориентации, обеспечивающей транспортировку на прямолинейный участок пути, к ориентации, обеспечивающей транспортировку на криволинейный участок пути.
[0010]
Помимо этого, способствующий ориентации элемент включает в себя вращающееся тело, а вращающееся тело, которое вращается в направлении под некоторым предварительно определенным углом по отношению к направлению транспортировки транспортируемого объекта на прямолинейном участке пути, способствует изменению ориентации при транспортировке транспортируемого объекта во время транспортировки транспортируемого объекта на криволинейный участок пути.
В этой конфигурации, вращающееся тело вращается в направлении под предварительно определенным углом по отношению к направлению транспортировки транспортируемого объекта на прямолинейном участке пути так, что способствующий ориентации элемент способствует изменению ориентации при транспортировке транспортируемого объекта таким образом, что ориентация при транспортировке транспортируемого объекта изменяется от ориентации, обеспечивающей транспортировку на прямолинейный участок пути, к ориентации, обеспечивающей транспортировку на криволинейный участок пути.
[0011]
Помимо этого, вращающееся тело вращается в контакте с транспортируемым объектом.
В этой конфигурации, вращающееся тело вращается в контакте с транспортируемым объектом так, что способствующий ориентации элемент способствует изменению ориентации при транспортировке транспортируемого объекта таким образом, что ориентация при транспортировке транспортируемого объекта изменяется от ориентации, обеспечивающей транспортировку на прямолинейный участок пути, к ориентации, обеспечивающей транспортировку на криволинейный участок пути.
[0012]
В соответствии с конвейером согласно данному изобретению, когда транспортируемый объект транспортируется с прямолинейного участка пути на криволинейный участок пути, способствующий ориентации элемент способствует изменению ориентации при транспортировке транспортируемого объекта (изменению ориентации при транспортировке от ориентации, обеспечивающей транспортировку на прямолинейный участок пути, к ориентации, обеспечивающей транспортировку на криволинейный участок пути) по прямолинейному участку путина стороне, находящейся выше по ходу транспортировки от исходного положения криволинейного участка пути на пути транспортировки. Таким образом, сопротивление скольжению задней половины транспортируемого объекта снижается, причем это сопротивление обуславливается направленной назад нагрузкой транспортируемого объекта, а между силой, прикладываемой для осуществления поворота передней половины транспортируемого объекта на криволинейный участок пути, и силой, прикладываемой для перемещения задней половины транспортируемого объекта в направлении, проходящем напротив криволинейного участка пути, поддерживается баланс. Таким образом, когда передняя половина транспортируемого объекта изменяет ориентацию на обеспечивающую транспортировку на криволинейный участок пути, задняя половина транспортируемого объекта может изменить ориентацию на обеспечивающую транспортировку на криволинейный участок пути. Это позволяет полностью поворачивать транспортируемый объект с направленной назад нагрузкой на криволинейный участок пути без столкновения с угловой направляющей криволинейного участка пути.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0013]
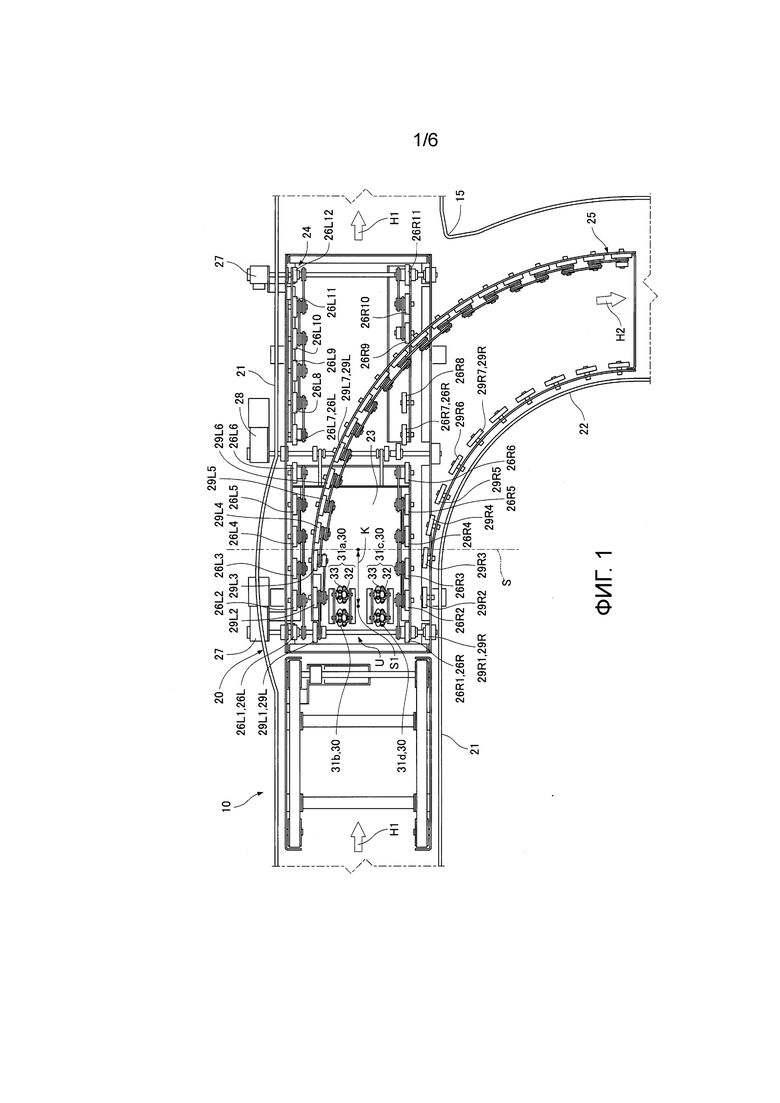
На фиг.1 представлен вид в плане секции ответвления конвейера в соответствии с данным изобретением;
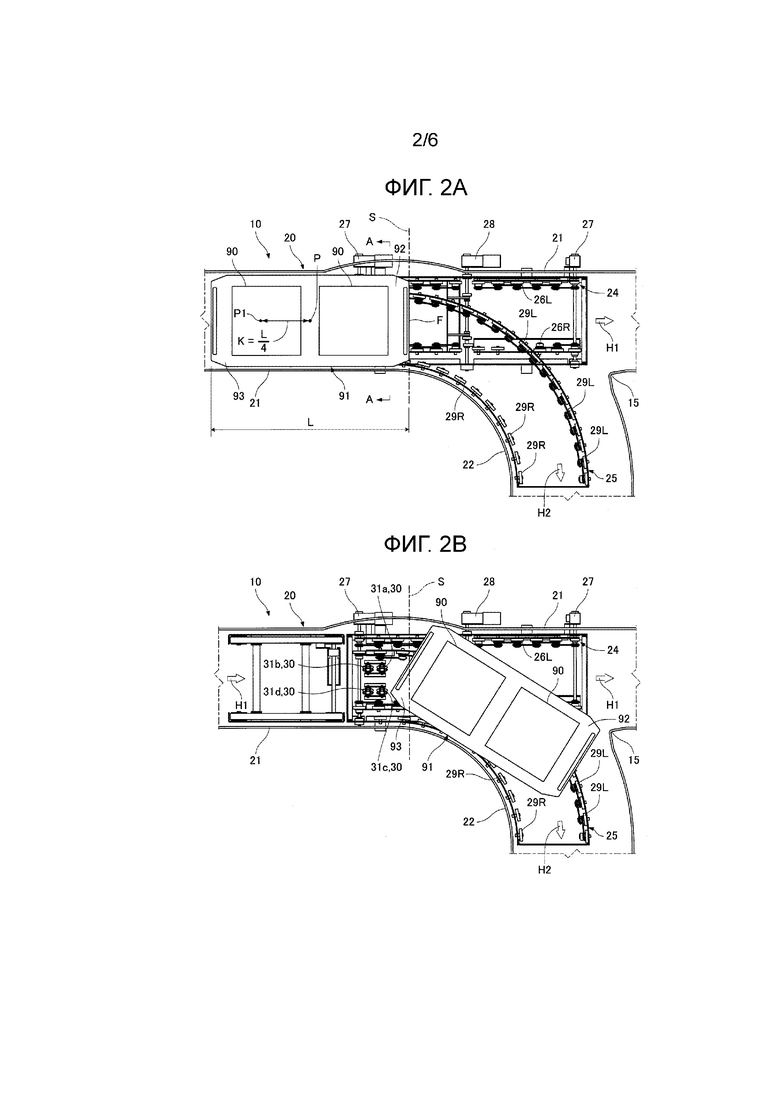
на фиг.2 представлен вид в плане, иллюстрирующий поддон, транспортируемый в секцию ответвления конвейера в соответствии с данным изобретением;
на фиг.2B представлен вид в плане, иллюстрирующий поддон, транспортируемый вдоль криволинейного участка пути конвейера в соответствии с данным изобретением;
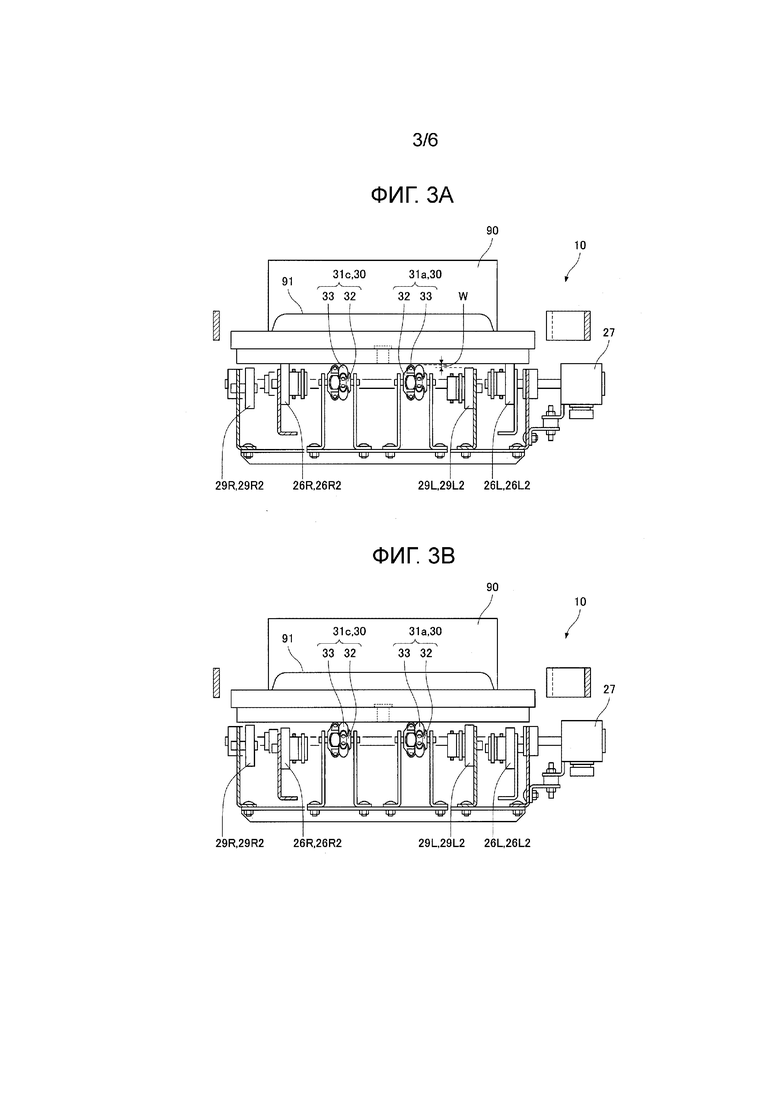
на фиг.3A представлено поперечное сечение, проведенное по линии A—A согласно фиг.2A, когда поддон транспортируется вдоль прямолинейного участка пути;
на фиг.3B представлено поперечное сечение, проведенное по линии A—A согласно фиг.2A, когда поддон транспортируется вдоль криволинейного участка пути;
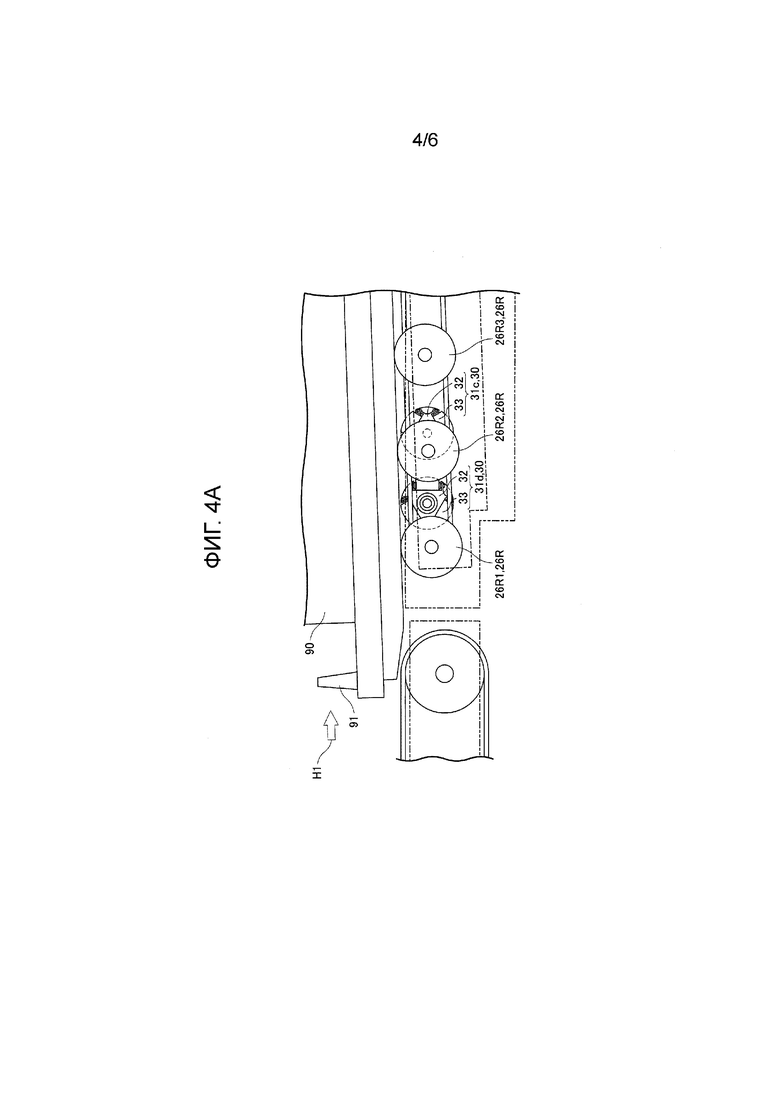
на фиг.4A представлен вид сбоку, иллюстрирующий окрестность способствующего ориентации элемента, когда поддон в секции ответвления транспортируется вдоль прямолинейного участка пути конвейером в соответствии с данным изобретением;
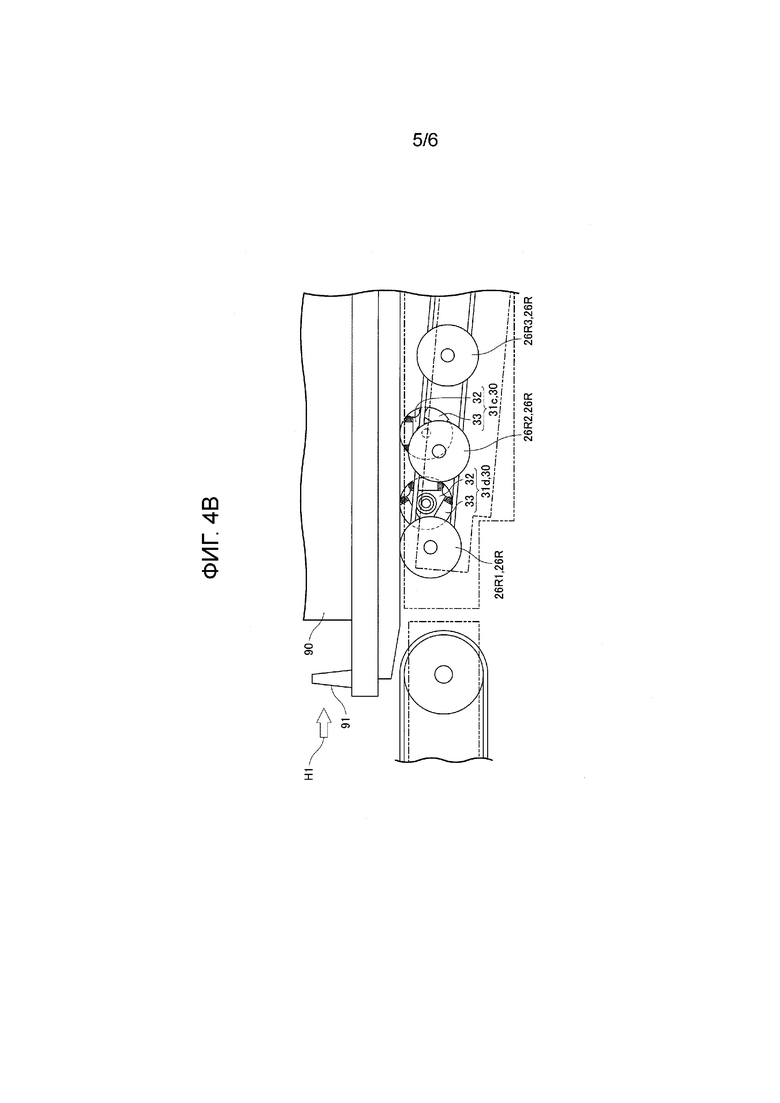
на фиг.4B представлен вид сбоку, иллюстрирующий окрестность способствующего ориентации элемента, когда поддон в секции ответвления транспортируется вдоль криволинейного участка пути конвейером в соответствии с данным изобретением;
на фиг.5А представлен вид в плане непосредственно перед тем, как поддон попадает на криволинейный участок пути, при этом поддон транспортируется в секции ответвления вдоль криволинейного участка пути конвейером согласно известному техническому решению;
на фиг.5B представлен вид в плане, когда поддон попадает на криволинейный участок пути, при этом поддон транспортируется в секции ответвления вдоль криволинейного участка пути конвейером согласно известному техническому решению; и
на фиг.5C представлен вид в плане непосредственно после того, как поддон попадает на криволинейный участок пути, при этом поддон транспортируется в секции ответвления вдоль криволинейного участка пути конвейером согласно известному техническому решению.
ОПИСАНИЕ ВАРИАНТА ОСУЩЕСТВЛЕНИЯ
[0014]
Ниже будет приведено описание конвейера 10 в соответствии с вариантом осуществления согласно данному изобретению.
Конвейер 10 предусмотрен в (иллюстрируемом) сортировочном оборудовании, предназначенном для сортировки ручной клади или грузов, например, в аэропорту или центре распределения. Как изображено на фиг.1, 2A и 2B, конвейер 10 транспортирует поддон 91 (пример «транспортируемого объекта»), на котором размещены предметы 90, такие, как ручная кладь или грузы, вдоль пути 20 транспортировки.
[0015]
Как изображено на фиг.2A, и 2B, поддон 91, транспортируемый конвейером 10, представляет собой длинную плиту, на которой можно разместить предметы 90, и имеет длину L в продольном направлении. Поддон 91 транспортируется вдоль пути 20 транспортировки таким образом, что продольное направление располагается вдоль направления транспортировки (продольное направление проходит вдоль направления транспортировки поддона 91). Соответственно, предметы 90 на поддоне 91 размещены в полуобласти, передней в продольном направлении поддона 91 (передней половине 92 поддона 91) и полуобласти, задней в продольном направлении поддона 91 (задней половине 93 поддона 91). Линия, проходящая через центр P поддона 91 в направлении ширины, служит в качестве границы упомянутых областей. Для удобства пояснения, предметы 90 показаны на фиг.2A и 2B размещенными в передней половине 92 поддона 91 и задней половине 93 поддона 91. Положения предметов 90, размещаемых на поддоне 91, не ограничиваются передней половиной 92 поддона 91 и задней половиной 93 поддона 91.
[0016]
Путь 20 транспортировки, по которому транспортируется поддон 91, включает в себя прямолинейный участок 21 пути, криволинейный участок 22 пути и секцию 23 ответвления, где криволинейный участок 22 пути ответвляется с одной стороны прямолинейного участка 21 пути (на фиг.1 - со стороны, правой в направлении H транспортировки поддона 91 на прямолинейном участке 21 пути). По мере необходимости, прямолинейный участок 21 пути, криволинейный участок 22 пути и секцию 23 ответвления объединяют.
[0017]
Как изображено на фиг.1, в секции 23 ответвления перекрывают друг друга прямолинейная дорожка 24 и дорожка 25 ответвления частично перекрывают друг друга. Прямолинейная дорожка 24 предусмотрена для направления поддона 91, направляемого с прямолинейного участка 21 пути на стороне, находящейся выше по ходу транспортировки на прямолинейный участок 21 пути. Дорожка 25 ответвления предусмотрена для направления поддона 91, направляемого с прямолинейного участка 21 пути на стороне, находящейся выше походу транспортировки в направлении транспортировки на криволинейный участок 22 пути, ответвляющийся на сторону выхода в направлении транспортировки. Прямолинейная дорожка 24 и дорожка 25 ответвления имеют верхнее положение U входа на прямолинейном участке 21 пути -находящееся выше по ходу транспортировки от исходного положения S криволинейного участка 22 пути на пути 20 транспортировки. Дорожки, проходящие ниже по ходу транспортировки от верхнего положения U входа, выполнены частично перекрывающими друг друга.
[0018]
Прямолинейная дорожка 24 включает в себя множество правых роликов 26R и множество левых роликов 26L. Правые ролики 26R и левые ролики 26L предусмотрены расположенными через предварительно определенные интервалы в раме, которая не изображена, и катящимися, перемещая поддон 91 на прямолинейный участок 21 пути. Правые ролики 26R и левые ролики 26L являются ведущими роликaми, привод которых осуществляет электродвигатель 27 привода. Правые ролики 26R или левые ролики 26L могут быть ведущими роликами, а другие ролики могут быть ведомыми роликами.
[0019]
Как изображено на фиг.1—4B, из числа правых роликов 26R и левых роликов 26L, правые ролики 26R1—26R6 и левые ролики 26L1—26L6, которые перекрывают множество правых роликов 29R и множество левых роликов 29L секции 25 ответвления и конфигурация которых позволяет перемещать их вертикально между положением (фиг.4A) для транспортировки поддона 91 на прямолинейный участок 21 пути и положением (фиг.4B) для транспортировки поддона 91 на криволинейный участок 22 пути. Правые ролики 26R1—26R6 и левые ролики 26L1—26L6 перемещаются вертикально за счет привода, осуществляемого электродвигателем 28 привода, а правый ролик 26R1 (левый ролик 26L1) при этом служит в качестве шарнира. Когда поддон 91 транспортируется на прямолинейный участок 21 пути, правые ролики 26R1—26R6 и левые ролики 26L1—26L6 поддерживаются в некотором предварительно определенном положении таким образом, что высота роликов (высота, определяемая касательной к самой высокой точке правых роликов 26R и левых роликов 26L), равна высоте роликов, характерной для правого ролика 29R1 и левого ролика 29L1 секции 25 ответвления (высоте, определяемой касательной к самой высокой точке правых роликов 29R и левых роликов 29L), и больше, чем высота роликов, характерная для правых роликов 29R2—29R6 и левых роликов 29L2—29L6. Конкретно, как изображено на фиг.3A, самая высокая точка правых роликов 26R и левых роликов 26L поддерживается в положении, где находится в контакте с низом поддона 91, тогда как самая высокая точка правых роликов 29R2—29R6 и левых роликов 29L2—29L6 секции 25 ответвления поддерживается в положении, находящемся ниже, чем самая высокая точка правых роликов 26R и левых роликов 26L. Высоту роликов, характерную для правых роликов 26R и левых роликов 26L, можно поддерживать большей, чем высота роликов, характерная для правого ролика 29R1 и левого ролика 29L1 секции 25 ответвления.
Как изображено на фиг.3B, когда поддон 91 транспортируется на криволинейный участок 22 пути, правые ролики 26R и левые ролики 26L движутся вниз таким образом, что высота роликов оказывается меньше, чем у правых роликов 29R и левых роликов 29L секции 25 ответвления.
[0020]
Как изображено на фиг.1, из числа правых роликов 26R и левых роликов 26L, правые ролики 26R7—26R11 и левые ролики 26L7—26L12, которые расположены после левого ролика 26R6 и левого ролика 26L6, всегда поддерживаются на постоянной высоте роликов. Высота роликов не изменяется при транспортировке поддона 91 на прямолинейный участок 21 пути и транспортировке поддона 91 на криволинейный участок 22 пути. Высоту роликов, характерную для правых роликов 26R7—26R11 и левых роликов 26L7—26L12, можно изменять, когда ролики перемещаются вертикально для транспортировки поддона 91 на прямолинейный участок 21 пути или криволинейный участок 22 пути, а правый ролик 26R11 (левый ролик 26L12) при этом служит в качестве шарнира. Когда поддон 91 транспортируется на прямолинейный участок 21 пути, правые ролики 26R7—26R11 и левые ролики 26L7—26L11 поддерживаются в некотором предварительно определенном положении таким образом, что высота роликов равна высоте роликов, характерной для правых роликов 29R и левых роликов 29L, то есть, правых роликов, начиная с ролика 29R7, и левых роликов, начиная с ролика 29L7, секции 25 ответвления. Когда поддон 91 транспортируется на криволинейный участок 22 пути, правые ролики 26R7—26R11 и левые ролики 26L7—26L12 перемещаются вниз таким образом, что высота роликов оказывается меньше, чем высота роликов, характерная для правых роликов 29R и левых роликов 29L, то есть, правых роликов, начиная с ролика 29R7 и левых роликов, начиная с ролика 29L7, секции 25 ответвления.
[0021]
Из числа правых роликов 26R и левых роликов 26L, принадлежащие прямолинейной дорожке 24 правый ролик 26R1 и левый ролик 26L1 в верхнем положении U входа имеют самую маленькую высоту роликов. Правые ролики 26R1—26R6 и левые ролики 26L1—26L6 расположены через предварительно определенные интервалы по направлению к стороне выхода прямолинейной дорожки 24, чтобы высота роликов постепенно увеличивалась, начиная с правого ролика 26R1 и левого ролика 26L1. Правые ролики 26R и левые ролики 26L, расположенные после правого ролика 26R6 и левого ролика 26L6, то есть, правые ролики 26R и левые ролики 26L при поддержании правого ролика 26R7 и левого ролика 26L7 на постоянной высоте роликов располагаются через предварительно определенные интервалы по направлению к стороне выхода прямолинейной дорожки 24.
[0022]
Дорожка 25 ответвления включает в себя правые ролики 29R и левые ролики 29L. Правые ролики 29R и левые ролики 29L предусмотрены через предварительно определенные интервалы в раме, которая не изображена, и катящимися, перемещая поддон 91 на криволинейный участок 22 пути. Левые ролики 29L являются ведущими роликaми, привод которых осуществляет электродвигатель 27 привода. Правые ролики 29R являются ведомыми роликами, которые катятся в контакте с поддоном 91. Правые ролики 29R или левые ролики 29L могут быть ведущими роликами.
[0023]
Правые ролики 29R и левые ролики 29L расположены через предварительно определенные интервалы по направлению к стороне выхода секции 25 ответвления таким образом, что ролики из числа правых роликов 29R и ролики из числа левых роликов 29L соответственно поддерживаются на постоянной высоте роликов.
[0024]
Как изображено на фиг.1, 3A и 3B, в верхнем положении U входа прямолинейной дорожки 24 и секции 25 ответвления предусмотрен способствующий ориентации элемент 30, чтобы способствовать ориентации при транспортировке поддона 91. Когда поддон 91 транспортируется с прямолинейного участка 21 пути на криволинейный участок 22 пути, способствующий ориентации элемент 30 способствует изменению ориентации при транспортировке поддона 91 от ориентации, обеспечивающей транспортировку на прямолинейный участок 21 пути, к ориентации, обеспечивающей транспортировку на криволинейный участок 22 пути. Способствующий ориентации элемент 30 включает в себя четыре колеса 31a, 31b, 31c и 31d (пример «вращающегося тела») из числа роликонесущих колес (зарегистрированный товарный знак).
Каждое из колес 31a, 31b, 31c и 31d включает в себя корпусную деталь 32 и бочонкообразный ролик 33 (пример «вращающегося тела»), предусмотренный на окружной поверхности корпусной детали 32. Колеса 31a, 31b, 31c и 31d могут свободно изменять направления вращения колес в соответствии с изменением ориентации при транспортировке поддона 91, транспортируемого на криволинейный участок 22 пути, за счет сложения вращения корпусной детали 32 (совершающей движение в направлении H1 транспортировки поддона 91) и вращения бочонкообразного ролика 33 (совершающего движение в направлении, горизонтально перпендикулярном направлению H1 транспортировки поддона 91). Корпусная деталь 32 вращается в таком же направлении, как направление H1 транспортировки поддона 91 на прямолинейном участке 21 пути. Бочонкообразный ролик 33 вращается в направлении, горизонтально перпендикулярном направлению H1 транспортировки поддона 91 на прямолинейном участке 21 пути (пример «направления под предварительно определенным углом по отношению к направлению транспортировки транспортируемого объекта на прямолинейном участке пути»). Колеса 31a, 31b, 31c и 31d представляют собой ведомые колеса, которые вращаются, когда бочонкообразные ролики 33 вступают в контакт с поддоном 91. Иными словами, каждое из колес 31a, 31b, 31c и 31d вращает бочонкообразный ролик 33 и корпусную деталь 32, когда бочонкообразный ролик 33 вступает в контакт с поддоном 91.
[0025]
Как изображено на фиг.1, колеса 31a, 31b, 31c и 31d находятся в предварительно определенном диапазоне около положения S1 на прямолинейном участке 21 пути, причем это положение S1 отделено предварительно определенным расстоянием K со стороны выше по ходу транспортировки от исходного положения S криволинейного участка пути, на пути 20 транспортировки. Как изображено на фиг.2A, предварительно определенное расстояние K представляет собой расстояние, соответствующее длине от центра P поддона 91 до центра P1 задней половины 93 поддона 91. Иными словами, предварительно определенное расстояние K представляет собой расстояние, соответствующее четверти длины L (L̷4) в продольном направлении поддона 91 (длины поддона 91 в направлении транспортировки). Задняя половина 93 поддона 91 представляет собой заднюю полуобласть эффективного низа, который можно ввести в контакт с правыми роликами 26R, левыми роликами 26L, правыми роликами 29R, левыми роликами 29L и колесами 31a, 31b, 31c и 31d у низа поддона 91. Помимо этого, предварительно определенный диапазон около положения S1 на прямолинейном участке 21 пути представляет собой диапазон, где задняя половина 93 поддона 91 накрывает прямолинейный участок 21 пути, когда центр P1 задней половины 93 поддона 91, транспортируемого на прямолинейном участке 21 пути, достигает положения S1 на прямолинейном участке 21 пути.
[0026]
Как изображено на фиг.1, 3A и 3B, четыре колеса 31a, 31b, 31c и 31d находятся на равных расстояниях по отношению к положению S1 на прямолинейном участке 21 пути и предусмотрены между вторым правым роликом 26R2, входящим в состав прямолинейной дорожки 24, и вторым левым роликом 29L2, входящим в состав секции 25 ответвления. Конкретно, колеса 31a и 31b находятся на левой - по отношению к положению S - стороне согласно направлению H1 транспортировки поддона 91, оказываясь напротив второго левого ролика 29L2. Колеса 31c и 31d находятся на правой - по отношению к положению S - стороне согласно направлению H1 транспортировки поддона 91, оказываясь напротив второго правого ролика 29R2. Колесо 31a расположено в линию с колесом 31b вдоль прямолинейного участка 21 пути. Колесо 31c расположено в линию с колесом 31d вдоль прямолинейного участка 21 пути. Более того, колесо 31a находится напротив колеса 31c в направлении, горизонтально перпендикулярном прямолинейному участку 21 пути. Колесо 31b находится напротив колеса 31d в направлении, горизонтально перпендикулярном прямолинейному участку 21 пути. Четыре колеса 31a, 31b, 31c и 31d находятся в предварительно определенном диапазоне около положения S1 на прямолинейном участке 21 пути. Таким образом, когда центр P1 задней половины 93 поддона 91, транспортируемого на прямолинейном участке 21 пути, достигает положения S1 на прямолинейном участке 21 пути, четыре колеса 31a, 31b, 31c и 31d можно равномерно вводить в контакт с низом задней половины 93 поддона 91, а низу задней половины 93 поддона 91 можно придать равномерную опору на четыре колеса 31a, 31b, 31c и 31d.
[0027]
Как изображено на фиг.3A, колеса 31a, 31b, 31c и 31d расположены таким образом, что высота роликов колес (высота, определяемая касательной к самой высокой точке бочонкообразного ролика 33, который переводится в верхнее положение корпусной детали 32 за счет вращения корпусной детали 32) оказывается меньшей, чем высота роликов, характерная для второго правого ролика 26R2 и второго левого ролика 26L2 при транспортировке поддона 91 на прямолинейный участок 21 пути, и эта высота роликов колес больше на высоту W, чем высота роликов, характерная для второго правого ролика 29R2 и второго левого ролика 29L2, входящих в состав секции 25 ответвления. Иными словами, желательно располагать колеса 31a, 31b, 31c и 31d так, чтобы высота роликов оказывалась между высотой роликов, характерной для второго правого ролика 26R2 и второго левого ролика 26L2, и высотой роликов, характерной для второго правого ролика 29R2 и второго левого ролика 29L2, при транспортировке поддона 91 на прямолинейный участок 21 пути. За счет этой компоновки колес 31a, 31b, 31c и 31d, когда поддон 91 транспортируется на прямолинейный участок 21 пути, второй правый ролик 26R2 и второй левый ролик 26L2, которые входят в состав прямолинейной дорожки 24, вводятся в контакт с низом поддона 91. Когда поддон 91 транспортируется на криволинейный участок 22 пути, второй правый ролик 26R2 и второй левый ролик 26L2 движутся вниз, вводя колеса 31a, 31b, 31c и 31d в контакт с низом поддона 91.
Высоту роликов колес 31a, 31b, 31c и 31d можно увеличивать, не препятствуя транспортировке поддона 91 на прямолинейный участок 21 пути при условии, что высота роликов оказывается большей, чем высота, характерная для второго правого ролика 29R2 и второго левого ролика 29L2.
[0028]
Как изображено на фиг.3B, колеса 31a, 31b, 31c и 31d служат опорой низу задней половины 93 поддона 91, когда бочонкообразный ролик 33 вступает в контакт с низом поддона 91 во время транспортировки поддона 91 с прямолинейного участка 21 пути на криволинейный участок 22 пути. Помимо этого, за счет вращений корпусных деталей 32 и бочонкообразных роликов 33, колеса 31a, 31b, 31c и 31d перемещают заднюю половину 93 поддона 91 влево по отношению к направлению H1 транспортировки поддона 91 на прямолинейном участке 21 пути (в направлении, проходящем напротив криволинейного участка 22 пути (направлении H2 транспортировки поддона 91 на криволинейный участок 22 пути)) как изображено на фиг.2B. Иными словами, колеса 31a, 31b, 31c и 31d способствуют изменению ориентации при транспортировке для задней половины 93 поддона 91 от ориентации, обеспечивающей транспортировку на прямолинейный участок 21 пути, к ориентации, обеспечивающей транспортировку на криволинейный участок 22 пути.
[0029]
Ниже будут описаны движения поддона 91 в секции 23 ответвления конвейера 10.
В секции 23 ответвления конвейера 10 поддон 91 транспортируется с прямолинейного участка 21 пути, расположенного перед (выше по ходу транспортировки) секцией 23 ответвления, на прямолинейный участок 21 пути, расположенный после секции 23 ответвления. В альтернативном варианте поддон 91 транспортируется с прямолинейного участка 21 пути, расположенного перед секцией 23 ответвления, на криволинейный участок 22 пути, расположенный после секции 23 ответвления.
[0030]
Поддон 91 транспортируется на прямолинейный участок 21 пути, расположенный после секции 23 ответвления, правыми роликами 26R и левыми роликами 26L прямолинейной дорожки 24. Как изображено на фиг.3A и 4A, когда поддон 91 транспортируется на прямолинейный участок 21 пути, высота роликов, характерная для правых роликов 26R2—26R6 и левых роликов 26L2—26L6, поддерживаются большей, чем высота роликов, характерная для правых роликов 29R1—29R6 и левых роликов 29L1—29L6 секции 25 ответвления. Поддон 91 транспортируется на прямолинейный участок 21 пути за счет вращений правых роликов 26R и левых роликов 26L.
[0031]
Поддон 91 транспортируется на криволинейный участок 22 пути, расположенный после секции 23 ответвления, правыми роликами 29R и левыми роликами 29L дорожки 25 ответвления. Как изображено на фиг.3B и 4B, когда поддон 91 транспортируется на криволинейный участок 22 пути, правые ролики 26R2—26R6 и левые ролики 26L2—26L6 прямолинейной дорожки 24 движутся вниз таким образом, что высота роликов оказывается меньшей, чем высота роликов, характерная для правых роликов 29R1—29R6 и левых роликов 29L1—29L6 секции 25 ответвления, и высота роликов колес 31a, 31b, 31c и 31d. Конкретно, чтобы предотвратить восприятие сопротивления правыми роликами 26R1—26R6 и левыми роликами 26L1—26L6 прямолинейной дорожки 24, правые ролики 29R1—29R6 и левые ролики 29L1—29L6 дорожки 25 ответвления и колеса 31a, 31b, 31c и 31d способствующего ориентации элемента 30 расположены на высоте роликов, которая больше, чем высота роликов, характерная для правых роликов 26R1—26R6 и левых роликов 26L1—26L6 прямолинейной дорожки 24. Поддон 91 транспортируется на криволинейный участок 22 пути за счет привода, вызывающего вращения левых роликов 29L.
[0032]
Как изображено на фиг.2A и 2B, когда передний конец F (набегающий конец передней половины 92 поддона 91) поддона 91 транспортируется в исходное положение S криволинейного участка 22 пути, находящееся на пути 20 транспортировки, а передняя половина 92 поддона 91 направляется на криволинейный участок 22 пути правыми роликами 29R и левыми роликами 29L секции 25 ответвления, ориентация при транспортировке поддона 91 изменяется от ориентации, обеспечивающей транспортировку на прямолинейный участок 21 пути, к ориентации, обеспечивающей транспортировку на криволинейный участок 22 пути, посредством силы, прикладываемой для направления передней половины 92 поддона 91 на криволинейный участок 22 пути с помощью левых роликов 29L секции 25 ответвления. Конкретно, передняя половина 92 поддона 91 поворачивается на криволинейный участок 22 пути, а задняя половина 93 поддона 91 скользит влево по отношению к направлению H1 транспортировки поддона 91 на прямолинейном участке 21 пути (в направлении, проходящем напротив криволинейного участка 22 пути (направлении H2 транспортировки поддона 91 на криволинейном участке 22 пути)).
[0033]
В этом случае, если нагрузка, прикладываемая к передней половине 92 и задней половине 93 поддона 91, оказывается, по существу, одинаковой, задняя половина 93 поддона 91 скользит, когда передняя половина 92 поддона 91 поворачивается на криволинейный участок 22 пути. Иными словами, когда передняя половина 92 поддона 91 изменяет ориентацию от обеспечивающей транспортировку на прямолинейный участок 21 пути к ориентации, обеспечивающей транспортировку на криволинейный участок 22 пути, задняя половина 93 поддона 91 изменяет ориентацию от обеспечивающей транспортировку на прямолинейный участок 21 пути, к ориентации, обеспечивающей транспортировку на криволинейный участок 22 пути. Это направляет поддон 91 на криволинейный участок 22 пути, не вызывая столкновение передней половины 92 поддона 91 с угловой направляющей 15.
Если нагрузка, прикладываемая к поддону 91, смещается к задней половине 93 поддона 91 (направленная назад нагрузка), сопротивление скольжению поддона 91 увеличивается. Это нарушает баланс между силой, прикладываемой для осуществления поворота передней половины 92 поддона 91 на криволинейный участок 22 пути, и силой, прикладываемой для осуществления скольжения задней половины 93 поддона 91. Таким образом, задняя половина 93 поддона 91 не сможет скользить, когда передней половиной 92 поддона 91 будет поворачиваться на криволинейный участок 22 пути. Конкретно, задняя половина 93 поддона 91 не сможет изменять ориентацию от обеспечивающей транспортировку на прямолинейный участок 21 пути, к ориентации, обеспечивающей транспортировку на криволинейный участок 22 пути, когда передняя половина 92 поддона 91 изменяет ориентацию от обеспечивающей транспортировку на прямолинейный участок 21 пути, к ориентации, обеспечивающей транспортировку на криволинейный участок 22 пути, так что поддон 91 не сможет полностью повернуться на криволинейный участок 22 пути, а передняя половина 92 поддона 91 столкнется с угловой направляющей 15.
Таким образом, способствующий ориентации элемент 30 в конвейере 10 располагается в предварительно определенном диапазоне около положения S1 на прямолинейном участке 21 пути, тем самым снижая сопротивление скольжению поддона 91, причем это сопротивление обуславливается направленной назад нагрузкой поддона 91. Конкретно, когда передняя половина 92 поддона 91 поворачивается на криволинейный участок 22 пути, задняя половина 93 поддона 91 вступает в контакт с бочонкообразными роликами 33 колес 31a, 31b, 31c и 31d способствующего ориентации элемента 30. Задняя половина 93 поддона 91 вступает в контакт с бочонкообразными роликами 33 таким образом, что бочонкообразные ролики 33 вращаются и перемещают заднюю половину 93 поддона 91 влево по отношению к направлению H1 транспортировки поддона 91. Таким образом, скольжению задней половины 93 поддона 91 помогают вращения колес 31a, 31b, 31c и 31d, облегчая скольжение задней половины 93 поддона 91 влево по отношению к направлению H1 транспортировки поддона 91. Иными словами, изменению ориентация при транспортировке - для задней половины 93 поддона 91 - помогает способствующий ориентации элемент 30, облегчая изменение ориентации при транспортировке задней половины 93 поддона 91 от ориентации, обеспечивающей транспортировку на прямолинейный участок 21 пути, к ориентации, обеспечивающей транспортировку на криволинейный участок 22 пути. Следовательно, ориентацию при транспортировке задней половины 93 поддона 91 можно изменять в соответствии с изменением ориентации при транспортировке передней половины 92 поддона 91.
[0034]
Как описано выше, в соответствии с данным вариантом осуществления, когда поддон 91 транспортируется с прямолинейного участка 21 пути на криволинейный участок 22 пути, способствующий ориентации элемент 30 способствует изменению ориентации при транспортировке поддона 91 (изменению ориентации при транспортировке поддона 91 от ориентации, обеспечивающей транспортировку на прямолинейный участок 21 пути, к ориентации, обеспечивающей транспортировку на криволинейный участок 22 пути) на прямолинейном участке 21 пути на стороне, находящейся выше по ходу транспортировки от исходного положения S криволинейного участка 22 пути на пути 20 транспортировки. Таким образом, сопротивление скольжению задней половины 93 поддона 91 уменьшается, при этом сопротивление обуславливается направленной назад нагрузкой поддона 91, а между силой, прикладываемой для осуществления поворота передней половины 92 поддона 91 на криволинейный участок 22 пути, и силой, прикладываемой для перемещения задней половины 93 поддона 91 в направлении, проходящем напротив криволинейного участка 22 пути, поддерживается баланс. Таким образом, когда передняя половина 92 поддона 91 изменяет ориентацию на обеспечивающую транспортировку на криволинейный участок 22 пути, задняя половина 93 поддона 91 может изменять ориентацию на обеспечивающую транспортировку на криволинейный участок 22 пути. Это позволяет поддону 91 с направленной назад нагрузкой полностью повернуться на криволинейный участок 22 пути, не сталкиваясь с угловой направляющей 15 криволинейного участка 22 пути.
[0035]
В данном варианте осуществления способствующий ориентации элемент 30 (колеса 31a, 31b, 31c и 31d) включает в себя - но не в ограничительном смысле - роликонесущие колеса (зарегистрированный товарный знак). Способствующий ориентации элемент 30 может включать в себя, например, колеса Илона (зарегистрированный товарный знак), свободные шарикоподшипники или самоориентирующиеся колесики при условии, что задняя половина 93 поддона 91 движется в направлении, проходящем напротив простирающегося криволинейного участка 22 пути, чтобы изменять ориентацию при транспортировке задней половины 93 поддона 91.
В альтернативном варианте, способствующий ориентации элемент 30 может включать в себя ленточный конвейер. Когда поддон 91 транспортируется на криволинейный участок 22 пути, ленточный конвейер можно прижать к низу поддона 91, чтобы способствовать изменению ориентации при транспортировке поддона 91. В этом случае, ленточный конвейер имеет некоторую секцию ленты, которая вращается в направлении под некоторым предварительно определенным углом по отношению к направлению H1 транспортировки поддона 91 на прямолинейном участке 21 пути.
В данном варианте осуществления колеса 31a, 31b, 31c и 31d представляют собой - но не в ограничительном смысле - ведомые колеса, которые вращаются, когда бочонкообразные ролики 33 вступают в контакт с поддоном 91. Колеса 31a, 31b, 31c и 31d могут включать в себя ведущие колеса, привод которых осуществляет электродвигатель привода.
В данном варианте осуществления, способствующий ориентации элемент 30 включает в себя - но не в ограничительном смысле - четыре тела вращения (колеса 31a, 31b, 31c и 31d). Количество тел вращения не ограничивается четырьмя при условии, что задней половине 93 поддона 91 можно сообщить скольжение в направлении, проходящем напротив простирающегося криволинейного участка 22 пути, чтобы изменять ориентацию при транспортировке задней половины 93 поддона 91. Способствующий ориентации элемент 30 может включать в себя от одного до трех тел вращения или, по меньшей мере, пять тел вращения.
В данном варианте осуществления четыре тела вращения (колеса 31a, 31b, 31c и 31d) способствующего ориентации элемента 30 расположены - но не в ограничительном смысле - на одинаковых расстояниях по отношению к положению S1 на прямолинейном участке 21 пути. Четыре тела вращения (колеса 31a, 31b, 31c и 31d) могут и не располагаться на одинаковых расстояниях при условии, что тела вращения размещены с возможностью способствовать изменению ориентации при транспортировке поддона 91, когда поддон 91 транспортируется с прямолинейного участка 21 пути на криволинейный участок 22 пути.
В данном варианте осуществления предметы 90, размещаемые на поддоне 91, транспортируются конвейером 10, но не в ограничительном смысле. Возможна и непосредственная транспортировка предметов 90 транспортируемого конвейером 10 без размещения их на поддоне 91.
ПЕРЕЧЕНЬ ПОЗИЦИЙ ЧЕРТЕЖЕЙ
[0036]
10 - Конвейер
20 - Путь транспортировки
21 - Прямолинейный участок пути
22 - Криволинейный участок пути
30 Способствующий ориентации элемент
31a Колесо (вращающееся тело)
31b Колесо (вращающееся тело)
31c Колесо (вращающееся тело)
31d Колесо (вращающееся тело)
91 Поддон (транспортируемый объект)
Конвейер 10 транспортирует поддон 91 вдоль пути 20 транспортировки, включающего в себя прямолинейный участок 21 пути и криволинейный участок 22 пути, соединенный с прямолинейным участком 21 пути. Конвейер 10 включает в себя способствующий ориентации элемент 30, конфигурация которого позволяет способствовать изменению ориентации при транспортировке поддона 91, когда поддон 91 транспортируется с прямолинейного участка 21 пути на криволинейный участок 22 пути. Способствующий ориентации элемент 30 предусмотрен на прямолинейном участке 21 пути выше по ходу транспортировки от исходного положения S криволинейного участка 22 пути, на пути 20 транспортировки. Изобретение позволяет полностью поворачивать транспортируемый объект с направленной назад нагрузкой на криволинейный участок пути без столкновения с угловой направляющей криволинейного участка пути. 4 з.п. ф-лы, 10 ил.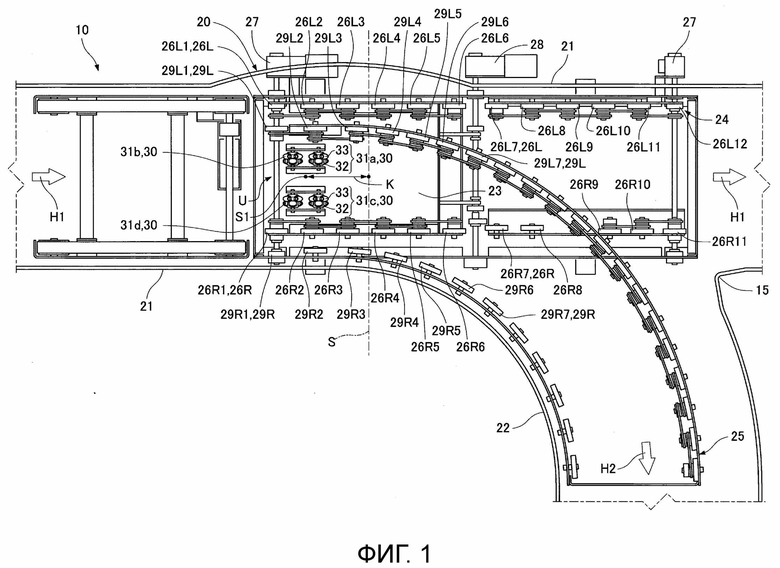
1. Конвейер для транспортировки транспортируемого объекта вдоль пути транспортировки, включающего в себя прямолинейный участок пути и криволинейный участок пути, соединенный с прямолинейным участком пути,
причем конвейер содержит способствующий ориентации элемент, выполненный с возможностью способствовать изменению ориентации при транспортировке транспортируемого объекта, когда транспортируемый объект транспортируется с прямолинейного участка пути на криволинейный участок пути,
причем криволинейный участок пути включает в себя правые ролики и левые ролики для перемещения транспортируемого объекта на криволинейный участок пути,
при этом способствующий ориентации элемент включает в себя вращающиеся тела, которые расположены на равных расстояниях относительно заданного положения на прямолинейном участке пути на стороне, находящейся выше по ходу транспортировки от исходного положения криволинейного участка пути на пути транспортировки, при этом вращающиеся тела предусмотрены между правыми роликами, входящими в состав криволинейного участка пути и левыми роликами, входящими в состав криволинейного участка пути.
2. Конвейер по п.1, в котором способствующий ориентации элемент предусмотрен в предварительно определенном диапазоне около положения на прямолинейном участке пути, причем это положение отделено предварительно определенным расстоянием на стороне, находящейся выше по ходу транспортировки от исходного положения криволинейного участка пути на пути транспортировки, и
упомянутое предварительно определенное расстояние представляет собой расстояние, соответствующее четверти длины транспортируемого объекта в направлении транспортировки.
3. Конвейер по одному из пп.1 и 2, в котором вращающееся тело выполнено с возможностью свободного изменения направления вращения в соответствии с изменением ориентации при транспортировке объекта, транспортируемого на криволинейный участок пути, способствует изменению ориентации при транспортировке транспортируемого объекта во время транспортировки транспортируемого объекта на криволинейный участок пути.
4. Конвейер по одному из пп.1 и 2, в котором
при этом вращающееся тело, которое вращается в направлении под предварительно определенным углом по отношению к направлению транспортировки транспортируемого объекта на прямолинейном участке пути, способствует изменению ориентации при транспортировке транспортируемого объекта во время транспортировки транспортируемого объекта на криволинейный участок пути.
5. Конвейер по одному из пп.3 и 4, в котором вращающееся тело вращается в контакте с транспортируемым объектом.
| DE 102011015608 A1, 04.10.2012 | |||
| US 1835823 A, 08.12.1931 | |||
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| Преобразователь переменного тока в постоянный | 1981 |
|
SU989709A1 |

