Изобретение относится к области поверхностной радиолокации и может быть использовано для обнаружения скрытых объектов инфраструктуры в грунте.
Известен метод и аппаратура для детектирования мин и других искусственных объектов на основе измерения разности между излучаемой и принимаемой акустической волной с помощью микрофона, либо радиоволнового приемопередатчика (патент US 6,415,666 В1, дата публикации 09.07.2002).
Также известен метод поиска скрытых в почве объектов с помощью генерации акустических волн и регистрации амплитуды сейсмических колебаний с помощью лазерного виброметра над объектом поиска (патент US 6,081,481, дата публикации 27.06.2000).
Общими недостатками при реализации обоих известных методов являются: большие габариты аппаратуры, применение в качестве регистрирующего устройства лазерных виброметров, подверженных влиянию погодных условий и подстилающей поверхности, а также ограниченная возможность соблюдения мер безопасности по расстоянию от поискового комплекса до объекта поиска.
В качестве прототипа принято устройство для поиска мин и минных полей, используемое при реализации способов поиска скрытых объектов в земле, основанных на возбуждении сейсмоакустических и зондирующих радиолокационных сигналов, включающее генератор сейсмоакустического сигнала, смонтированный совместно с опорной плитой в санях, буксируемых базовым транспортным средством, в котором расположены компьютеризированные пульты управления, оснащенные управляющими пультами и дисплеями наблюдения. На крыше транспортного средства установлена передающая антенна. За пределы транспортного средства вынесены дистанционно управляемые малогабаритные самодвижущиеся носители поисковых элементов, соединенные с компьютеризированными пультами управления кабельными либо радиоканальными линиями передачи оперативных данных по разведке подстилающей поверхности. При этом самодвижущиеся носители поисковых элементов представляют собой группу приемников, каждый из которых снабжен антенной системой в виде поперечной рамы с установленными на ней радиолокационными датчиками считывания механических вибраций почвы и радиоволновыми датчиками определения проводимости и диэлектрической проницаемости грунта (патент РФ №2681271 С1, дата приоритета 17.05.2018, дата публикации 05.03.2019, автор Шайдуров Р.Г., RU, прототип).
Недостатками прототипа являются: необходимость использования мощного источника сейсмоакустического сигнала с силой удара до 10 т, большие габариты аппаратуры и трудозатраты при подготовке к использованию.
Технической проблемой, решаемой заявляемым изобретением, является выполнение устройства для поиска подповерхностных объектов в виде автономного поискового аппарата и использование конструкции привода его перемещения в качестве генератора сейсмических волн, что позволит исключить применение внешнего мощного источника сейсмоакустического сигнала.
Для решения технической проблемы предложено роботизированное устройство для поиска подповерхностных объектов на основе параметрического метода, характеризующееся тем, что оно выполнено в виде автономного поискового аппарата, управляемого дистанционно по радиоканалу со станции управления, при этом поисковый аппарат содержит дистанционно управляемую ходовую часть в виде шасси с грунтозацепами на ведущих колесах, радиолокатор в виде радиолокационной станции и бортовой компьютер, при этом грунтозацепы, расположенные на поверхности ведущих колес, предназначены для использования в качестве генератора сейсмических волн при движении поискового аппарата, а радиолокатор состоит из приемопередатчика с фазированной антенной решеткой, обеспечивающей с помощью бортового компьютера сканирование поверхности, а также регистрацию и идентификацию подповерхностных объектов при их реакции на сейсмическое воздействие от ходовой части поискового аппарата.
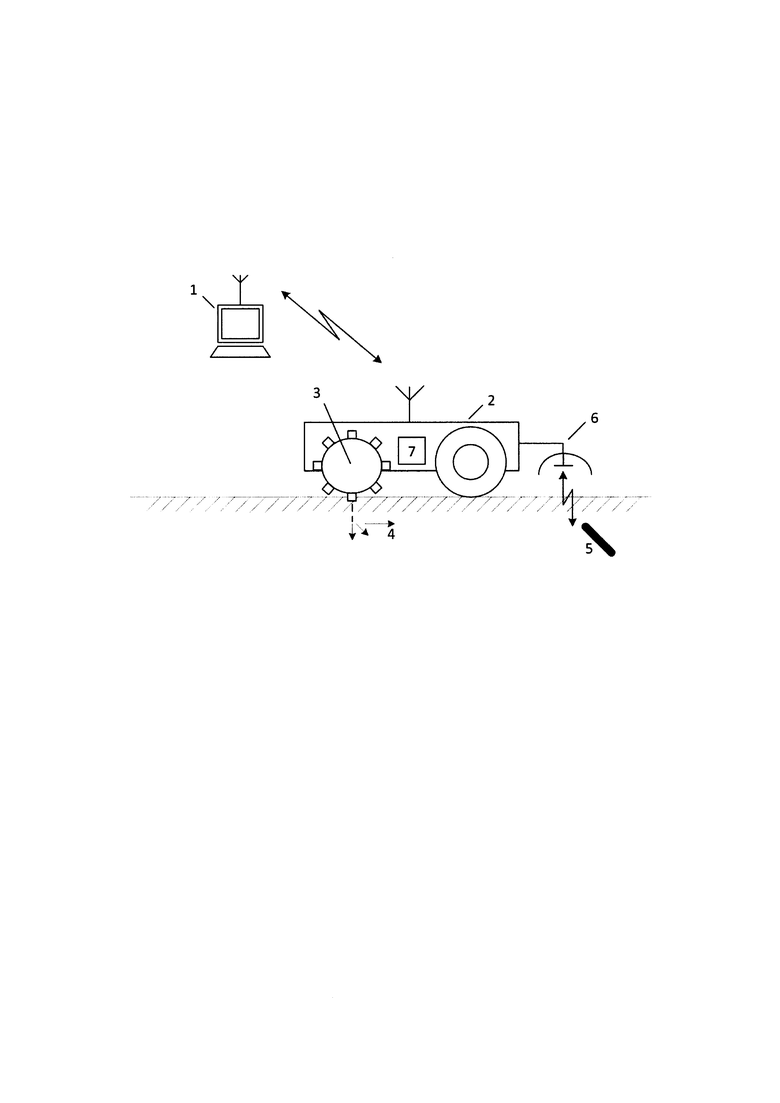
На чертеже схематично изображено роботизированное устройство для поиска подповерхностных объектов на основе параметрического метода, где 1 - станция управления; 2 - поисковый аппарат; 3 - ведущее колесо шасси с грунтозацепами на поверхности; 4 - сейсмическая волна, генерируемая ведущими колесами с грунтозацепами; 5 - объект поиска; 6 - радиолокационная станция (РЛС), 7 - бортовой компьютер.
Роботизированное устройство для поиска подповерхностных объектов работает следующим образом. Со станции управления 1 задается область поиска для дистанционно управляемого поискового аппарата 2. При его движении ведущими колесами 3 генерируется сейсмическая волна 4, которая вызывает вынужденные механические колебания оболочки объекта поиска 5. РЛС 6, установленная на поисковом аппарате 2, производит сканирование поверхности и регистрирует реакцию подповерхностных объектов на сейсмическое воздействие от ходовой части. Первичную обработку полученных данных производит бортовой компьютер 7.
Заявленное устройство наиболее целесообразно использовать на открытых для прохождения самодвижущегося аппарата участках типа сельскохозяйственных угодий, дорог, широких улиц с маркировкой обнаруженных подповерхностных объектов.
Технический результат, достигаемый изобретением, заключается в использовании конструкции привода перемещения автономного поискового аппарата в качестве генератора сейсмических волн за счет эффекта от движения ведущих колес с грунтозацепами поискового аппарата, обеспечивающего создание сейсмических волн без использования внешнего источника сейсмоакустического сигнала.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПОИСКА МИН И МИННЫХ ПОЛЕЙ НА ОСНОВЕ РАДИОЛОКАЦИОННОГО ПАРАМЕТРИЧЕСКОГО МЕТОДА | 2018 |
|
RU2681271C1 |
| УСТРОЙСТВО ДЛЯ ПОИСКА ПОДПОВЕРХНОСТНЫХ ОБЪЕКТОВ | 2019 |
|
RU2739023C1 |
| МОБИЛЬНАЯ АВТОНОМНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА С БЛОЧНОЙ ИЗМЕНЯЕМОЙ СТРУКТУРОЙ | 2019 |
|
RU2704048C1 |
| СПОСОБ ПОИСКА ОБЪЕКТОВ ИСКУССТВЕННОГО ПРОИСХОЖДЕНИЯ В ЗЕМЛЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2390801C1 |
| Базовая платформа автономного интеллектуального робототехнического комплекса (АИРТК) | 2021 |
|
RU2764910C1 |
| ДИСТАНЦИОННО УПРАВЛЯЕМЫЙ МОБИЛЬНЫЙ РОБОТ, ВИДЕОКАМЕРА МОБИЛЬНОГО РОБОТА, ЗВУКОПРИЕМНАЯ СИСТЕМА САМОНАВЕДЕНИЯ МОБИЛЬНОГО РОБОТА, СФЕРИЧЕСКАЯ ГРАНАТА | 2011 |
|
RU2473863C1 |
| Беспилотный летательный аппарат самолетного типа для обнаружения пропавшего человека | 2019 |
|
RU2723201C1 |
| ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ | 2017 |
|
RU2643059C1 |
| Мультиагентная робототехническая система | 2017 |
|
RU2658684C1 |
| Роботизированная платформа специального назначения | 2016 |
|
RU2640264C1 |
Изобретение относится к средствам поверхностной радиолокации и может быть использовано для обнаружения скрытых объектов инфраструктуры в грунте. Сущность: роботизированное устройство выполнено в виде автономного поискового аппарата (2), дистанционно управляемого по радиоканалу со станции (1) управления. Поисковый аппарат (2) содержит дистанционно управляемую ходовую часть в виде шасси с грунтозацепами на ведущих колесах (3), радиолокатор (6) в виде радиолокационной станции и бортовой компьютер (7). Грунтозацепы, расположенные на поверхности ведущих колес (3), предназначены для использования в качестве генератора сейсмических волн (4) при движении поискового аппарата (2). Радиолокатор (6) состоит из приемопередатчика с фазированной антенной решеткой, обеспечивающей с помощью бортового компьютера (7) сканирование поверхности, а также регистрацию и идентификацию подповерхностных объектов при их реакции на сейсмическое воздействие от ходовой части поискового аппарата (2). Технический результат: выполнение устройства для поиска подповерхностных объектов в виде автономного поискового аппарата и использование конструкции привода его перемещения в качестве генератора сейсмических волн, что позволяет исключить применение внешнего мощного источника сейсмоакустического сигнала. 1 ил.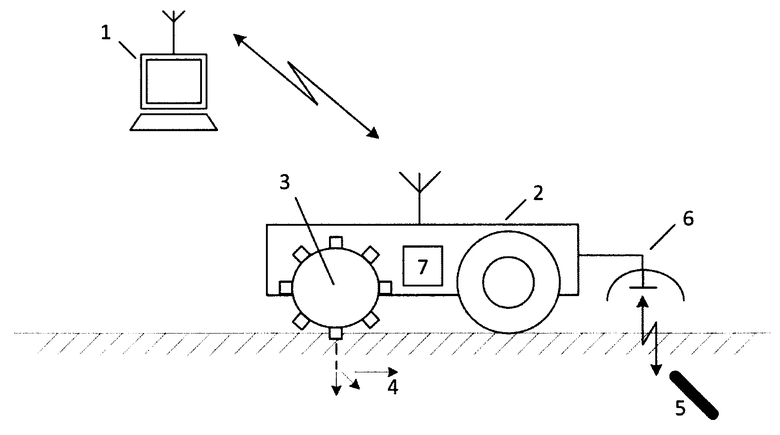
Роботизированное устройство для поиска подповерхностных объектов на основе параметрического метода, характеризующееся тем, что выполнено в виде автономного поискового аппарата, управляемого дистанционно по радиоканалу со станции управления, при этом поисковый аппарат содержит дистанционно управляемую ходовую часть в виде шасси с грунтозацепами на ведущих колесах, радиолокатор в виде радиолокационной станции и бортовой компьютер, при этом грунтозацепы, расположенные на поверхности ведущих колес, предназначены для использования в качестве генератора сейсмических волн при движении поискового аппарата, а радиолокатор состоит из приемопередатчика с фазированной антенной решеткой, обеспечивающей с помощью бортового компьютера сканирование поверхности, а также регистрацию и идентификацию подповерхностных объектов при их реакции на сейсмическое воздействие от ходовой части поискового аппарата.
| УСТРОЙСТВО ДЛЯ ПОИСКА МИН И МИННЫХ ПОЛЕЙ НА ОСНОВЕ РАДИОЛОКАЦИОННОГО ПАРАМЕТРИЧЕСКОГО МЕТОДА | 2018 |
|
RU2681271C1 |
| Р.Г.Шайдуров | |||
| Параметрический метод обнаружения подповерхностных объектов на основе взаимодействия электромагнитных и сейсмических волн | |||
| Автореф | |||
| диссертации на соискание уч | |||
| степ | |||
| кандидата технических наук, г | |||
| Красноярск, 2019 | |||
| СПОСОБ ПОИСКА ОБЪЕКТОВ ИСКУССТВЕННОГО ПРОИСХОЖДЕНИЯ В ЗЕМЛЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2390801C1 |

