Область техники, к которой относится изобретение
Изобретение относится к области водолазной техники, в частности к подводным транспортным средствам для автономного передвижения водолазов под водой.
Уровень техники
Большой проблемой при выполнении подводных работ является малая скорость передвижения водолазов под водой. Это сильно ограничивает пространственные возможности водолазной работы. Максимальная скорость перемещения легкого водолаза под водой лимитируется его мускульными возможностями и гидродинамическим сопротивлением и составляет максимум 3 км/ч. Кроме того, интенсивная мускульная работа приводит к повышенному расходу сжатого воздуха из баллонов, что уменьшает возможное время нахождения легкого водолаза под водой. По этой причине в разное время предлагались устройства для решения этой транспортной задачи без использования мускульной силы водолазов. Это различные подводные буксирующие устройства.
Например, буксирное устройство водолаза, содержащее корпус с двигательно-движительной установкой, переключатель режимов ее работы, закрепленную на корпусе штангу с установленным на ее свободном конце устройством для передачи управляющего усилия водолаза. Штанга установлена в диаметральной плоскости буксировщика в направлении его продольной оси и жестко связана с корпусом. Устройство для передачи управляющего усилия водолаза выполнено в виде бампера-поручня, вынесенного перед штангой вдоль ее оси, или в виде поперечного поручня с рукоятками и рулями, закрепленного на свободном конце штанги с возможностью поворота вокруг вертикальной и горизонтальной осей. Переключатель режимов работы двигательно-движительной установки размещен на свободном конце штанги [RU 2154591, 20.08.2000].
Или подводные сани для водолаза, включающие двигатель и пропеллер, приводимый в движение двигателем, для приведения в движение саней. От гребного винта вперед выступает корпус. Поворотный шарнир в корпусе позволяет относительное вращение переднего и заднего концов корпуса. Лонжерон выходит наружу с каждой стороны переднего конца корпуса. На каждом лонжероне установлены крылья с возможностью вращения, и ныряльщик может управлять вращением корпуса и каждым крылом [US 4813367, 21.03.1989].
Недостатки таких устройств состоят в том, что получающаяся связка аппарат-водолаз имеет большой продольный габарит, руки водолаза заняты во время движения, при выходе на сушу аппарат необходимо нести в руках или буксировать на привязи.
Известен погружной привод для перемещения аквалангиста по воде. Движитель состоит из закрытого гребного винта, который съемно и регулируемо прикреплен к баллону с воздухом водолаза. К кожуху гребного винта съемно прикреплен водонепроницаемый корпус двигателя, в котором находится двигатель, приводящий в движение гребной винт. Батареи для привода двигателя заключены в два ящика в форме почки, по одному с каждой стороны обычного грузового пояса дайвера. Рукоятка, имеющая, по крайней мере, один переключатель, используется для включения/выключения устройства, а также для управления скоростью [US 4843998, 04.07.1989]. Недостатками устройства являются ограниченные функциональные возможности для передвижения водолаза, что снижает эффективность его использования
Также известно устройство для перемещения водолаза под водой, в виде подводной пропульсивной установки для водолаза, которая имеет пропеллер с приводом от электродвигателя в случае, если под ногой водолаза защелкивается защитная оболочка. Устройство имеет водонепроницаемый корпус, в котором находится электродвигатель и аккумулятор для его питания. Мотор управляет пропеллером вне корпуса. Корпус фиксируется под ногой водолаза с помощью крючков, удерживающих его на подошве обуви. Защитная оболочка окружает корпус и пропеллер и прикрепляется также к корпусу. Он имеет отверстия в верхней части для направления потока воды вверх и вниз по потоку от гребного винта. Скорость и направление можно регулировать с помощью органов управления, закрепленных на поясе дайвера [СН 666662, 15.08.1988]. Такое устройство имеет ограниченные функциональные возможности для передвижения водолаза, что снижает эффективность его использования.
Известен буксировщик водолаза наспинный, имеющий прочный цилиндрический корпус, содержащий аккумуляторную батарею и гребной электродвигатель, снабженный паховым и плечевыми упорами для закрепления на теле водолаза, при этом носовая оконечность прочного корпуса буксировщика оканчивается прочным цилиндрическим приборным отсеком, передний конец которого соединен с консолью, оснащенной двумя панелями управления по бокам, а также резиновым гребнем, и оканчивающейся подвижным плоским индикатором (дисплеем) [RU 2330782, 10.08.2008]. Недостатками данного устройства является его тяжеловесность поскольку требуется обратный подъем буксировщика из воды на борт катера с помощью двух человек или с помощью кран-балки. Для этого водолаз освобождается от буксировщика в воде и остропливает его поданным с борта катера фалом. На пологий берег буксировщик вытаскивается из воды с помощью двух человек.
Этих недостатков лишено буксирное устройство типа Jeat-Boat [Снаряжение для дайвинга: подводный мини буксировщик Jetboots. Опубликовано 26.11.2013 от Admin в Надводные и подводные аппараты. Найдено в Интернет 13.06.2021 по адресу: https://www.patriot3.com/jetboots], являющееся наиболее близким техническим решением к заявляемому. Оно представляет собой систему, надеваемую на пояс и ноги водолаза. На каждом его бедре закрепляются специальными ремнями по винтовому движителю с электродвигателем. Электропитание и управление двигателями осуществляется из напоясного герметичного блока управления через герморазъемы, кабели и гермовводы на двигателях. Электропитание всего устройства осуществляется от напоясного герметичного блока аккумуляторной литий-ионной батареи через кабель с герморазъемами. Управление режимами работы электродвигателей, а значит и регулирование скорости движения водолаза осуществляется кнопками управления на поясном блоке управления. Размеры, вес и расположение устройства на теле таковы, что перемещение водолаза с ним максимально приближено к естественному плаванию, руки остаются свободными, в том числе и при выходе на сушу. Однако данное устройство имеет несколько недостатков.
Первый состоит в том, что движители имеют высокий уровень гидроакустического шума. Связано это с высокой угловой скоростью вращения винтов, необходимой для обеспечения высокой тяги при относительно небольшом их диаметре. Высокая угловая скорость определяет высокую линейную скорость на концах лопастей, что в свою очередь приводит к кавитационным эффектам, которые и дают гидроакустический шум. Кроме того, в примененном движителе отсутствует направляющий аппарат для потока на входе и выходе движителя, что приводит к неламинарному характеру движения воды через него. Неламинарный поток также увеличивает шум и приводит к относительно низкому КПД винтового движителя.
Второй недостаток связан с невозможностью безопасной смены аккумуляторной батареи под водой. Необходимость ее смены возникает при длительной работе водолаза в воде. Используемые в устройстве литий-ионные батареи находятся в прочном герметичном корпусе, на боковой стенке которого размещен силовой герморазъем. В случае размыкания герморазъема для замены аккумуляторного блока, или же случайных размыканиях других герморазъемов во время работы электродвигателей, когда от аккумулятора потребляется большой ток, (такая ситуация нередка в повседневной практике работы), происходит дуговое подгорание силовых контактов разъемов и сравнительно быстрый их выход из строя.
Сущность изобретения
Задачей заявленной группы изобретений является создание устройства для перемещения водолаза (УПВ), позволяющего осуществлять движение под водой с помощью гребных винтовых движителей на основе электродвигателей с питанием от заменяемого аккумулятора и со сниженным уровнем гидроакустического шума и высоким КПД винтовых движителей. С возможностью многократной замены аккумуляторной батареи УПВ под водой без дугового подгорания контактов герморазъема и безопасным рассоединением любых герморазъемов при работающих электродвигателях винтовых движителей.
Техническим результатом заявленных вариантов изобретения является безопасность работы устройства за счет его конструктивных элементов и высокий КПД винтовых движителей со значительным снижением гидроакустического шума.
Технический результат достигается тем, что по первому варианту создано устройство для передвижения водолаза под водой (УПВ), содержащее поясной и бедренные ремни, выполненные с возможностью их крепления на теле водолаза, винтовые движители, аккумуляторные батареи, блок управления и водонепроницаемые кабели, при этом бедренные ремни крепятся посредством правого и левого поворотного кронштейна соответственно к правой и левой стороне поясного ремня, а на правой и левой сторонах бедренных ремней крепятся соответствующие винтовые движители, на поясном ремне закреплены блок управления и блок аккумуляторной батареи, блок управления содержит контроллер, рукоятку управления, кнопку включения, индикатор заряда аккумулятора, причем выход рукоятки управления соединен с первым входом контроллера, выход кнопки включения соединен со вторым входом контроллера, вход индикатора заряда аккумулятора соединен с первым выходом контроллера, в свою очередь блок аккумуляторной батареи, содержит аккумулятор и контроллер, а каждый винтовой движитель представляет собой совмещенный с гребным винтом бесколлекторный трехфазный низкооборотный электродвигатель и состоит из корпуса, с вмонтированными в него магнитной системы с трехфазной обмоткой и платы управления, к корпусу через профилированные пилоны, являющиеся выходным направляющим аппаратом винтового движителя, прикреплены первый подшипник и крышка, к которой через профилированные пилоны, являющиеся входным направляющим аппаратом винтового движителя, прикреплен второй подшипник, в подшипниках установлена крыльчатка, по окружности которой смонтирована магнитная система на постоянных магнитах, причем крыльчатка с магнитной системой на постоянных магнитах образует ротор бесколлекторного трехфазного двигателя, а магнитная система с трехфазной обмоткой и платой управления образуют статор, плата управления содержит трехфазный коммутатор, контроллер винтового движителя и электронное реле питания, причем вход и выход контроллера винтового движителя соединен с входом и выходом трехфазного коммутатора, водонепроницаемые кабели движителей, кабель аккумулятора через блочные контактные герморазъемы соединены с блоком управления, контроллер блока управления коммутирует с контроллером блока аккумуляторной батареи и контроллерами винтовых движителей и подключенных к ним соответственно рукоятки управления, кнопки включения, индикатора заряда аккумулятора, аккумулятора, платы управления, трехфазного коммутатора и электронного реле питания посредством информационной шины, выполненной на основе витой пары двухпроводного интерфейса, линий питания и блочных контактных и контактных герморазъемов, витая пара блока управления соединена с третьим входом контроллера блока управления, витой парой кабеля аккумулятора и соответствующими блочными контактными герморазъемами, линии питания блока управления соединены с соответствующими линиями питания кабеля аккумулятора, входами контроллера блока управления и соответствующими блочными контактными герморазъемами, витая пара блока аккумуляторной батареи соединена с входом контроллера блока аккумуляторной батареи и с соответствующим блочным контактным герморазъемом, линии питания блока аккумуляторной батареи соединены с соответствующим выходом аккумулятора, входом контроллера блока аккумуляторной батареи и с соответствующим блочным контактным герморазъемом, к каждому винтовому движителю через гермоввод присоединен кабель винтового движителя с контактным герморазъемом, вход контроллера винтового движителя подключен к витой паре кабеля винтового движителя, входы трехфазной обмотки присоединены к соответствующим выходам трехфазного коммутатора, входы которого присоединены к выходам электронного реле питания, причем электронное реле питания выполнено с возможностью мгновенного отключения трехфазного коммутатора от линий питания кабеля винтового движителя по команде от контроллера винтового движителя, контроллер винтового движителя и трехфазный коммутатор выполнены таким образом, чтобы их алгоритмы работы создавали в трехфазной обмотке и магнитной системе вращающееся в заданном по команде от рукоятки управления направлении магнитное поле с обратной связью от взаимодействующей с ним магнитной системой на постоянных магнитах, обеспечивая вращение крыльчатки в том же направлении, контроллер винтового движителя выполнен с возможностью обеспечения непрерывной высокоскоростной проверки целостности связи между контроллерами по соответствующим витым парам.
По второму варианту создано устройство для передвижения водолаза под водой (УПВ), содержащее поясной и бедренные ремни, выполненные с возможностью их крепления на теле водолаза, винтовые движители, аккумуляторные батареи, блок управления и водонепроницаемые кабели, при этом бедренные ремни крепятся посредством правого и левого поворотного кронштейна соответственно к правой и левой стороне поясного ремня, а на правой и левой сторонах бедренных ремней крепятся соответствующие винтовые движители, на поясном ремне закреплены блок управления и блок аккумуляторной батареи, блок управления содержит контроллер, рукоятку управления, кнопку включения, индикатор заряда аккумулятора, причем выход рукоятки управления соединен с первым входом контроллера, выход кнопки включения соединен со вторым входом контроллера, вход индикатора заряда аккумулятора соединен с первым выходом контроллера, в свою очередь блок аккумуляторной батареи, содержит аккумулятор и контроллер, а каждый винтовой движитель состоит из герметичного отсека, внутри которого размещены плата управления, ведущая полумуфта магнитной муфты, редуктор и бесколлекторный электродвигатель, содержащий кольцевой статор, с вмонтированной в него магнитной системой с трехфазной обмоткой и установленный внутри кольцевого статора через его крышки на подшипниках выходной вал, с закрепленной на нем магнитной системой на постоянных магнитах, причем герметичный отсек образован корпусом с приливами, с вставленными в него на уплотнениях и закрепленных винтами верхней крышкой с гермовводом и нижней крышкой с установленным на ней посредством уплотнения и винтов магнитопроницаемым герметизирующим стаканом, причем на стакане соосно установлена ось, на которой через подшипник скольжения установлена крыльчатка с закрепленной внутри нее ведомой полумуфтой магнитной муфты, к приливам корпуса винтами коаксиально прикреплен кольцевой обтекатель, к которому защелками присоединены передняя и задняя профилированные крышки с профилированными пилонами, ведущая полумуфта магнитной муфты закреплена на нижней крышке в подшипнике и соединена с выходом редуктора, вход которого соединен с выходным валом бесколлекторного электродвигателя, коаксиально расположенные ведущая полумуфта и ведомая полумуфта магнитной муфты выполнены с возможностью передачи вращающего момента с ведущей полумуфты посредством магнитного поля через магнитопроницаемый стакан на ведомую полумуфту и на крыльчатку, плата управления содержит трехфазный коммутатор, контроллер винтового движителя, электронное реле питания, причем вход и выход контроллера винтового движителя соединен с входом и выходом трехфазного коммутатора, водонепроницаемые кабели винтовых движителей, кабель аккумулятора через блочные контактные герморазъемы соединены с блоком управления, контроллер блока управления коммутирует с контроллером блока аккумуляторной батареи и контроллерами винтовых движителей и подключенных к ним соответственно рукоятки управления, кнопки включения, индикатора заряда аккумулятора, аккумулятора, платы управления, трехфазного коммутатора и электронного реле питания посредством информационной шины, выполненной на основе витой пары двухпроводного интерфейса, линий питания и блочных контактных и контактных герморазъемов, витая пара блока управления соединена с третьим входом контроллера блока управления, витой парой кабеля аккумулятора и соответствующими блочными контактными герморазъемами, линии питания блока управления соединены с соответствующими линиями питания кабеля аккумулятора, входами контроллера блока управления и соответствующими блочными контактными герморазъемами, витая пара блока аккумуляторной батареи соединена с входом контроллера блока аккумуляторной батареи и с соответствующим блочным контактным герморазъемом, линии питания блока аккумуляторной батареи соединены с соответствующим выходом аккумулятора, входом контроллера блока аккумуляторной батареи и с соответствующим блочным контактным герморазъемом, к каждому винтовому движителю через гермоввод присоединен кабель винтового движителя с контактным герморазъемом, вход контроллера винтового движителя подключен к витой паре кабеля винтового движителя, входы трехфазной обмотки присоединены к соответствующим выходам трехфазного коммутатора, входы которого присоединены к выходам электронного реле питания, причем электронное реле питания выполнено с возможностью мгновенного отключения трехфазного коммутатора от линий питания кабеля винтового движителя по команде от контроллера винтового движителя, контроллер винтового движителя и трехфазный коммутатор выполнены таким образом, чтобы их алгоритмы работы создавали в трехфазной обмотке и магнитной системе вращающееся в заданном по команде от рукоятки управления направлении магнитное поле с обратной связью от взаимодействующей с ним магнитной системой на постоянных магнитах, обеспечивая вращение бесколлекторного электродвигателя и крыльчатки в заданном направлении, контроллер винтового движителя выполнен с возможностью обеспечения непрерывной высокоскоростной проверки целостности связи между контроллерами по соответствующим витым парам.
В предпочтительном варианте винтовые движители, блок управления, блок аккумуляторной батареи, кабели движителей и аккумулятора выполнены в герметичном подводном исполнении.
Краткое описание чертежей
Сущность изобретения поясняется чертежами.
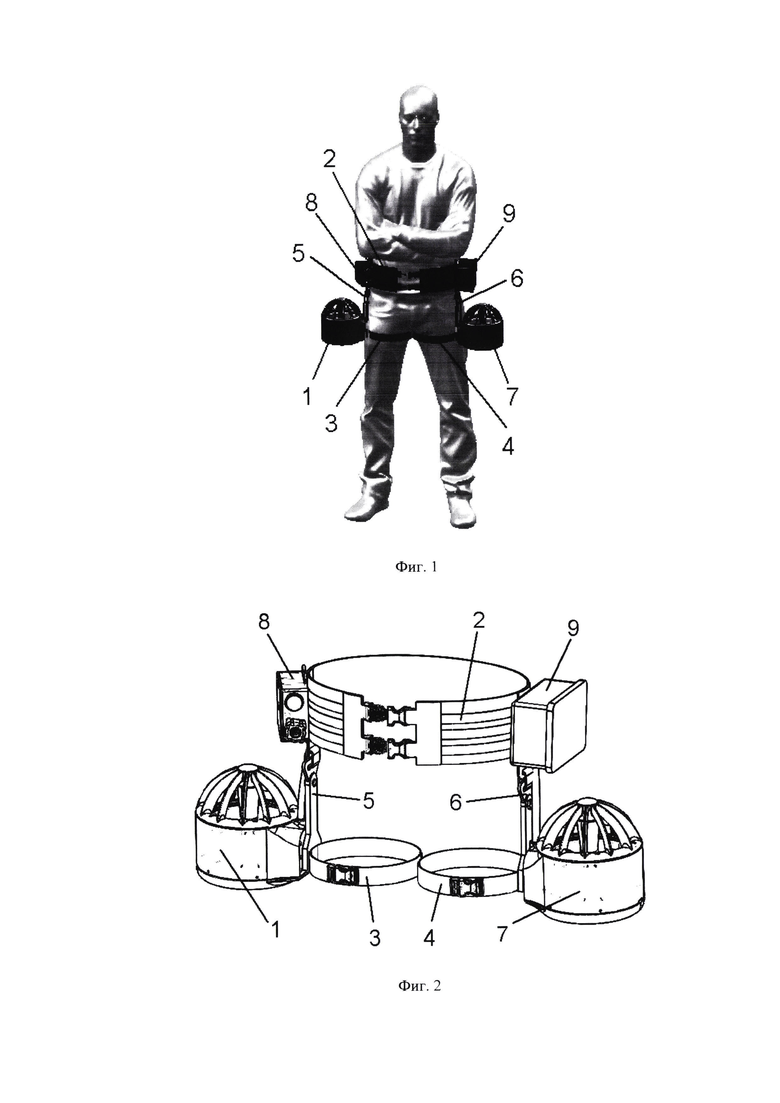
на фиг. 1 показано УПВ на человеке;
на фиг. 2 показан общий вид УПВ спереди;
на фиг. 3 показан общий вид УПВ сзади;
на фиг. 4 показан общий вид блока управления УПВ;
на фиг. 5 показан блок аккумуляторной батареи;
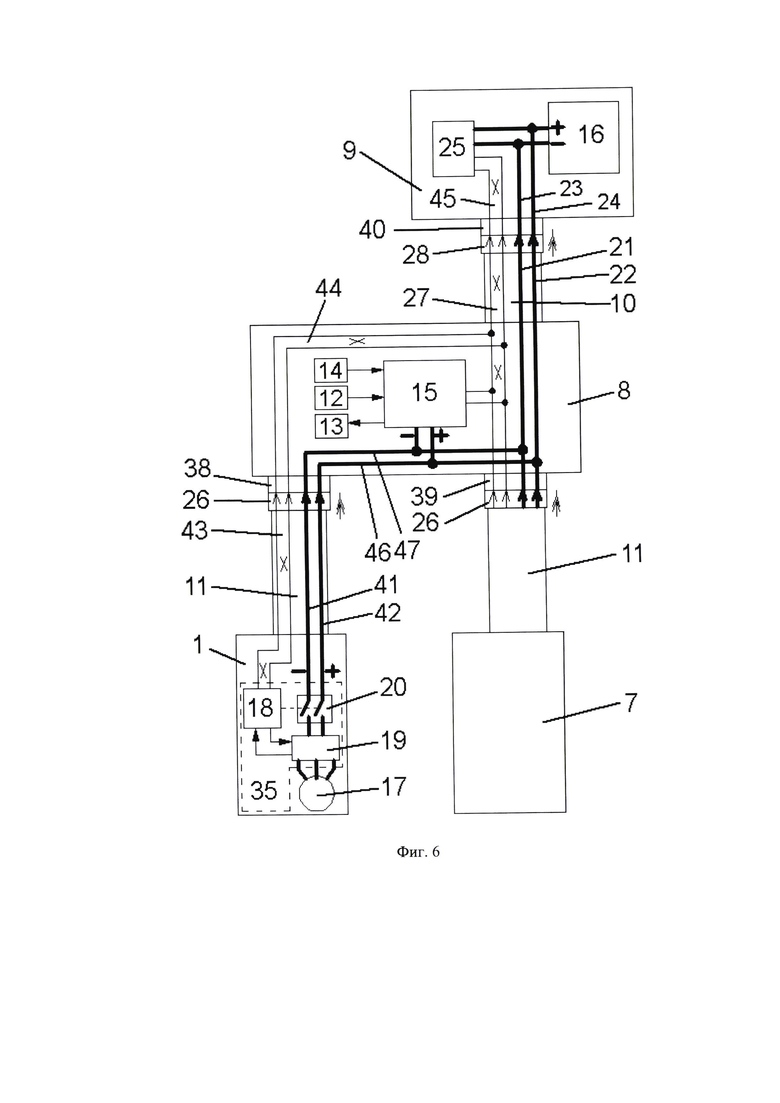
на фиг. 6 показана функциональная электрическая схема УПВ;
на фиг. 7 упрощенно показан винтовой движитель в вертикальном разрезе;
на фиг. 8 упрощенно показан винтовой движитель в горизонтальном разрезе;
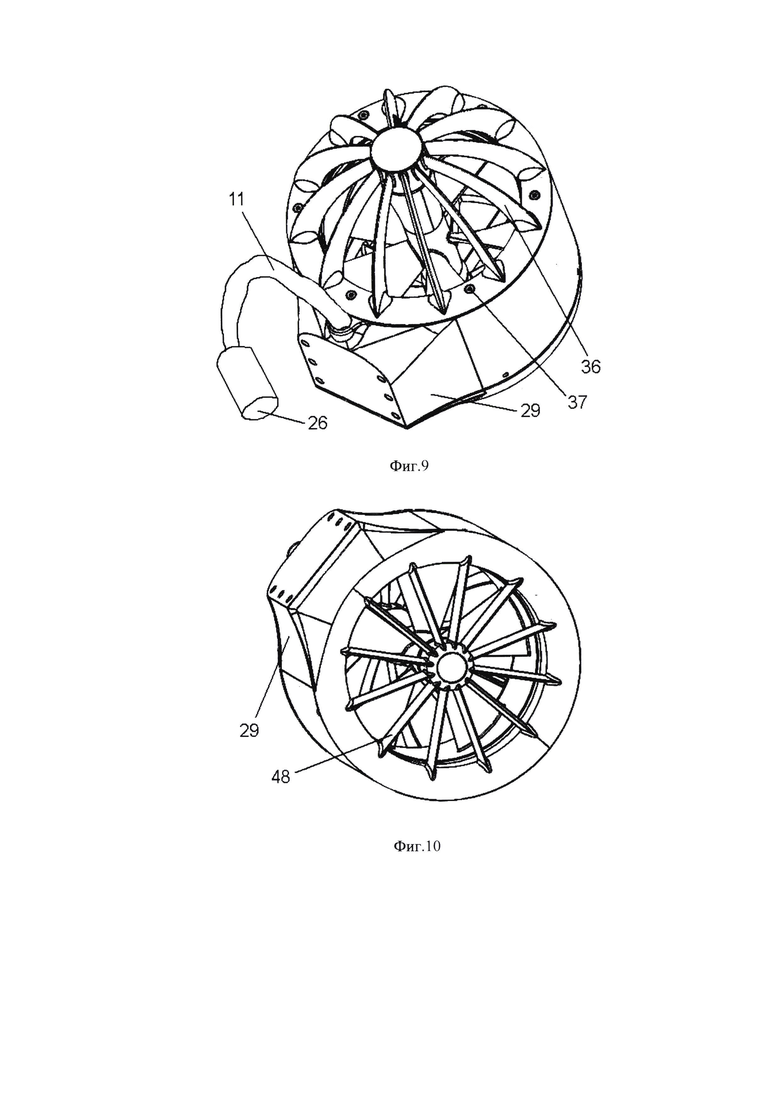
на фиг. 9 показан передний направляющий аппарат винтового движителя;
на фиг. 10 показан задний направляющий аппарат винтового движителя;
на фиг. 11 показана функциональная электрическая схема УПВ по второму варианту;
на фиг. 12 показан общий вид винтового движителя по второму варианту конструкции;
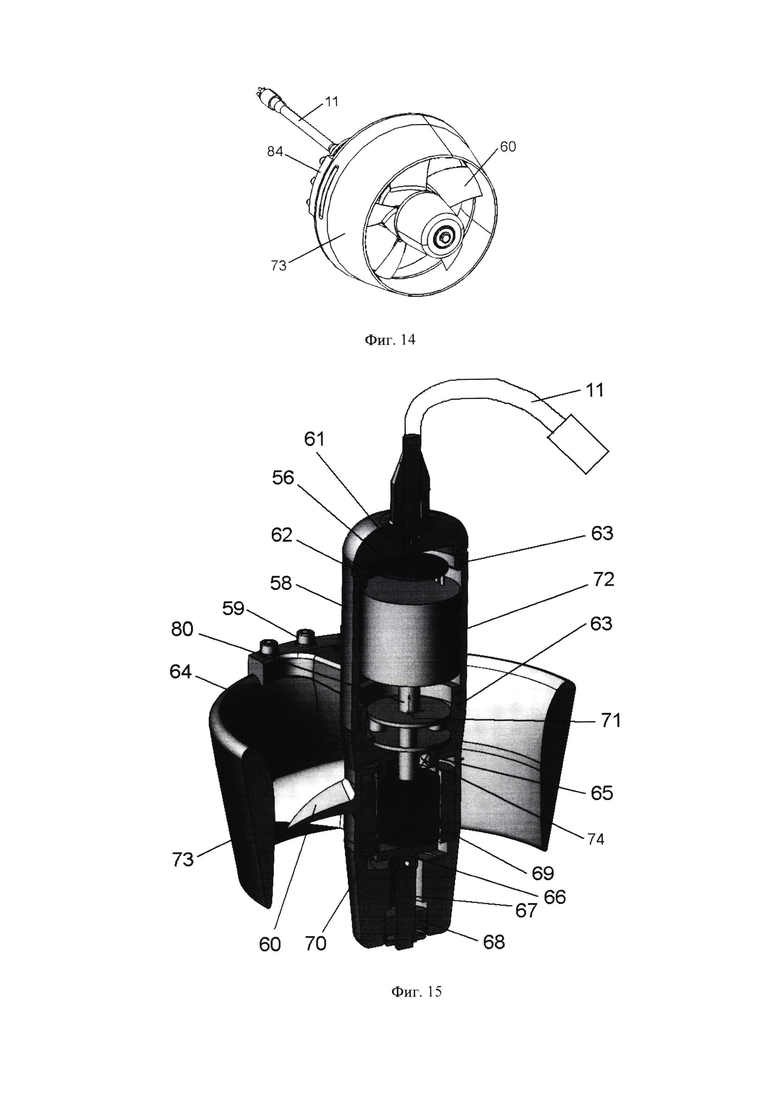
на фиг. 13, 14 показан общий вид винтового движителя по второму варианту со снятыми
передней и задней профилированными крышками;
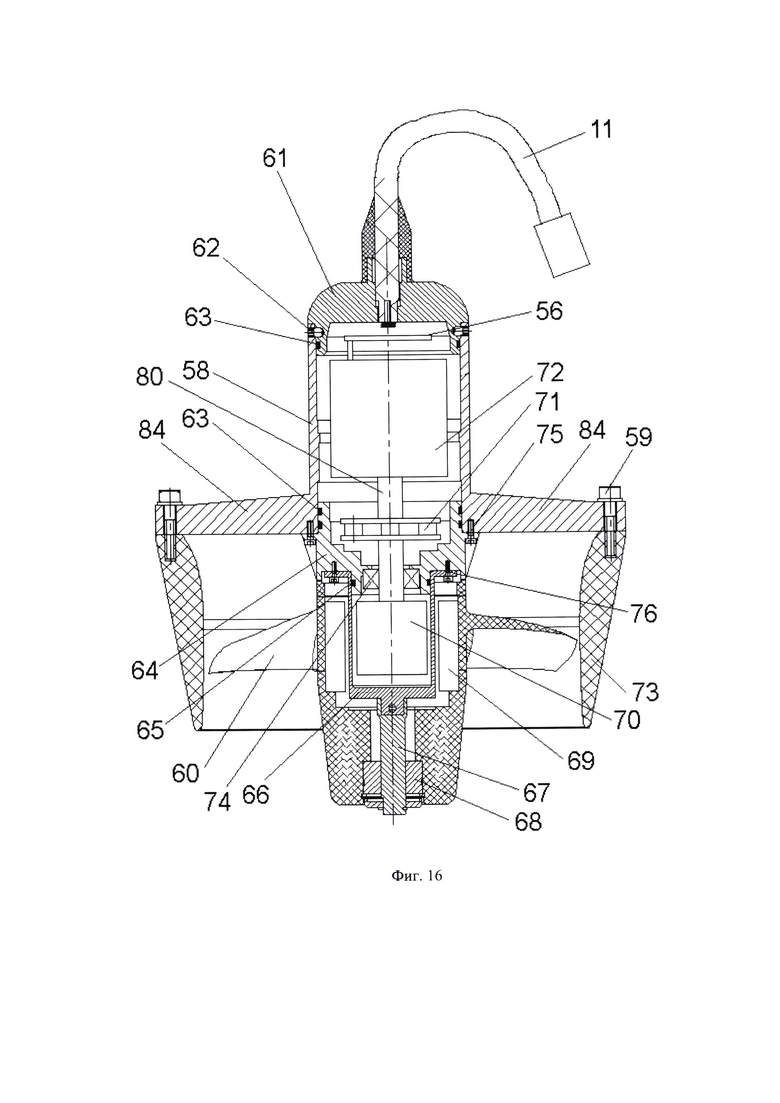
на фиг. 15, 16 условно показаны разрезы винтового движителя по второму варианту конструкции;
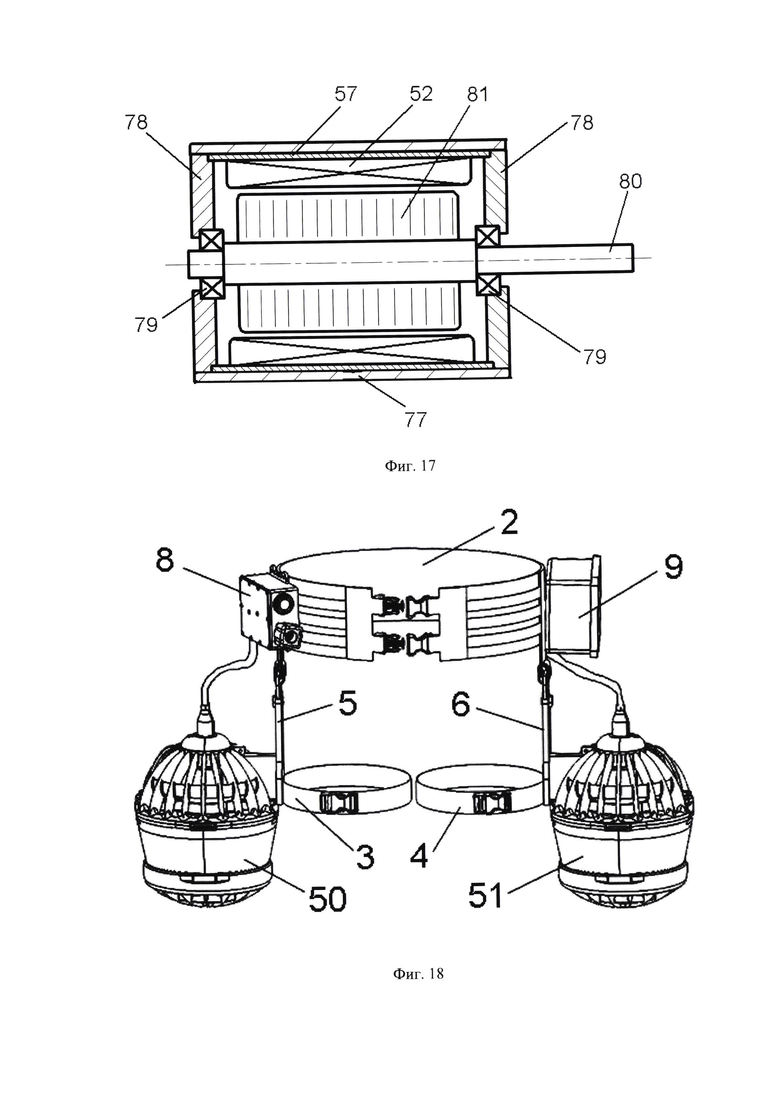
на фиг. 17 показан бесколлекторный электродвигатель винтового движителя второго варианта конструкции;
на фиг. 18 – общий вид УПВ спереди по второму варианту.
Подробное описание осуществления изобретения
Устройство для передвижения водолаза под водой, по первому и второму варианту (см. фиг. 1, 2, 3) состоит из двух винтовых движителей (позиции 1, 7, 50, 51), поясного ремня 2, выполненного с возможностью застегивания на талии человека, правого бедренного ремня 3 и левого бедренного ремня 4, выполненных с возможностью застегивания на соответственно правом и левом бедрах человека, правого поворотного кронштейна 5 и левого поворотного кронштейна 6. Причем правый бедренный ремень 3 посредством правого поворотного кронштейна 5 крепится к правой стороне поясного ремня 2, а левый бедренный ремень 4 посредством левого поворотного кронштейна 6 крепится к левой стороне поясного ремня 2. При этом на правой стороне правого бедренного ремня 3 и на левой стороне левого бедренного ремня 4 крепятся соответствующие винтовые движители (позиции 1 и 7 или 50 и 51). УПВ также содержит блок управления 8 (см. фиг. 4), в котором размещены контроллер 15, рукоятка управления 14, кнопка включения 12, индикатор заряда аккумулятора 13, витая пара 44, линии питания (позиции 46, 47), блочные контактные герморазъемы (позиции 38, 39). Причем выход рукоятки управления 14 соединен с первым входом контроллера 15, выход кнопки 12 соединен со вторым входом контроллера 15, вход индикатора заряда аккумулятора 13 соединен с первым выходом контроллера 15.
УПВ также содержит блок аккумуляторной батареи 9, (см. фиг. 5) с размещенными в нем аккумулятором 16, контроллером 25, линиями питания (позиции 23, 24), витой пары 45 и блочного контактного герморазъема 40. Причем линии питания (позиции 23, 24) присоединены (см. фиг. 6) к соответствующим выходам аккумулятора 16, входам питания контроллера 25 и блочным контактам герморазъема 40. Витая пара 45 соединяет контроллер 25 с соответствующим блочным контактным герморазъемом 40.
Каждый винтовой движитель (позиции 1, 7) по первому варианту (см. фиг. 7, 8, 9, 10) представляет собой совмещенный с гребным винтом бесколлекторный трехфазный низкооборотный электродвигатель и состоит из корпуса 29, с вмонтированными в него магнитной системы 30 с трехфазной обмоткой 17 и платы управления 35. К корпусу 29 через профилированные пилоны 48, являющиеся выходным направляющим аппаратом винтового движителя, крепится подшипник 33. Кроме того, к корпусу 29 по посадке и винтами 37 крепится крышка 36, к которой через профилированные пилоны 49, являющиеся входным направляющим аппаратом винтового движителя, крепится подшипник 34. В подшипниках (позиции 33, 34), установлена крыльчатка 31, по окружности которой смонтирована магнитная система на постоянных магнитах 32. Причем крыльчатка 31 с магнитной системой на постоянных магнитах 32 образуют ротор бесколлекторного трехфазного двигателя, а магнитная система 30 с трехфазной обмоткой 17 и платой управления 35 образуют статор.
По второму варианту (см. фиг. 12, 13, 14, 15, 16, 17, 18) каждый винтовой движитель (позиции 50, 51) состоит из герметичного отсека, образуемого корпусом 58 с приливами 84, с вставленными в него на уплотнениях 63 и закрепленных соответственно винтами 62 и 75 верхней крышкой 61 с гермовводом и нижней крышкой 64 и установленным на уплотнении 65 винтами 76 магнитопроницаемым герметизирующим стаканом 66. При этом гермоввод выполнен с возможностью заведения внутрь герметичного отсека кабеля винтового движителя 11. На магнитопроницаемом герметизирующим стакане 66 соосно установлена ось 67, на которой через подшипник скольжения 68 установлена крыльчатка 60 с закрепленной внутри нее ведомой полумуфтой 69 магнитной муфты. Магнитная муфта представлена ведомой 69 и ведущей 70 полумуфтами. К приливам 84 корпуса 58 винтами 59 коаксиально крепится кольцевой обтекатель 73, к которому защелками прикреплена передняя профилированная крышка 85 с профилированными пилонами 82 и задняя профилированная крышка 86 с профилированными пилонами 83. Внутри герметичного отсека размещена ведущая полумуфта 70 магнитной муфты, редуктор 71, бесколлекторный электродвигатель 72 и плата управления 56, причем ведущая полумуфта 70 магнитной муфты закреплена на нижней крышке 64 в подшипнике 74 и соединена с выходом редуктора 71, вход которого соединен с выходным валом бесколлекторного электродвигателя 72. Коаксиально расположенные ведущая полумуфта 70 и ведомая полумуфта 69 магнитной муфты выполнены в виде магнитных систем на постоянных магнитах и с возможностью передачи вращающего момента с ведущей полумуфты 70 посредством магнитного поля через магнитопроницаемый стакан 66 на ведомую полумуфту 69 и соответственно на крыльчатку 60.
Бесколлекторный электродвигатель 72 состоит из кольцевого статора 77, с вмонтированной в него магнитной системы 57 с трехфазной обмоткой 52 и установленного внутри статора через крышки 78 на подшипниках 79 выходного вала 80, с закрепленной на нем магнитной системой на постоянных магнитах 81.
При этом по первому и второму варианту устройства плата управления (позиции 35, 56) содержит трехфазный коммутатор (позиции 19, 54), контроллер винтового движителя (позиции 18, 53) электронное реле питания (позиции 20, 55).
Далее все соединения в обеих вариантах осуществляются по одной и той же схеме (см. фиг. 6 и фиг. 11).
Вход и выход контроллера винтового движителя (позиции 18, 53) соединен с входом и выходом трехфазного коммутатора (позиции 19, 54). Водонепроницаемые кабели 11 винтовых движителей (позиции 1, 7, 50, 51), кабель аккумулятора 10 через блочные контактные герморазъемы (позиции 38, 39, 40) соединены с блоком управления 8. Контроллер 15 блока управления 8 коммутирует с контроллером 25 блока аккумуляторной батареи 9 и контроллерами (позиции 18, 53) винтовых движителей (позиции 1, 7, 50, 51) и подключенных к ним соответственно рукоятки управления 14, кнопки включения 12, индикатора заряда аккумулятора 13, аккумулятора 16, платы управления (позиции 35, 56), трехфазного коммутатора (позиции 19, 54) и электронного реле питания (позиции 20, 55) посредством информационной шины, выполненной на основе витой пары двухпроводного интерфейса (позиции 27, 43, 44, 45), линий питания (позиции 21, 22, 23, 24, 41, 42, 46, 47) и контактных и блочных контактных герморазъемов (позиции 26, 28, 38, 39, 40). В качестве информационной шины, выполненной на основе «витой пары» двухпроводного интерфейса, может быть использован, например, RS485 по программному протоколу ModBus. В таких сетях один из контроллеров является ведущим, а остальные - ведомыми. Ведущий контроллер периодически, с определенной частотой, производит опрос ведомых контроллеров по данной шине, получает от них ответы об их состоянии, получает данные от датчиков, подключенных к ним, и раздает необходимые команды. Передача информации по ней осуществляется в цифровом виде, с кодированием нулей и единиц разностью потенциалов на двух проводах.
К блоку управления 8 через гермоввод присоединен кабель аккумулятора 10 с контактным герморазъемом 28.
Витая пара 44 соединена с третьим входом контроллера 15 блока управления 8, витой парой 27 кабеля аккумулятора 10 и соответствующими блочными контактными герморазъемами (позиции 38, 39). Линии питания (позиции 46, 47) соединены с соответствующими линиями питания (позиции 21, 22) кабеля аккумулятора 10, входами контроллера 15 блока управления 8 и соответствующими блочными контактными герморазъемами (позиции 38, 39). При этом блок управления 8 закреплен на поясном ремне 2.
Линии питания (позиции 46, 47) блока управления 8 соединены с соответствующими линиями питания (позиции 21, 22) кабеля аккумулятора 10, входами контроллера 15 блока управления 8 и соответствующими блочными контактными герморазъемами (38, 39).
Витая пара 45 блока аккумуляторной батареи 9 соединена с входом контроллера 25 блока аккумуляторной батареи 9 и с блочным контактным герморазъемом (40). Линии питания (позиции 23, 24) блока аккумуляторной батареи 9 соединены с соответствующим выходом аккумулятора 16, входом контроллера 25 блока аккумуляторной батареи 9 и с соответствующим блочным контактным герморазъемом 40. Кроме того к каждому винтовому движителю (позиции 1, 7, 50, 51) через гермоввод присоединен кабель винтового движителя 11 с контактным герморазъемом 26.
Вход контроллера (позиции 18, 53) винтовых движителей (позиции 1, 7, 50, 51) подключен к витой паре 43 кабеля винтового движителя 11. Входы трехфазной обмотки (позиции 17, 52) присоединены к соответствующим выходам трехфазного коммутатора (позиции 19, 54) входы которого присоединены к выходам электронного реле питания (позиции 20, 55). Причем электронное реле питания (позиции 20, 55) выполнено с возможностью мгновенного отключения трехфазного коммутатора (позиции 19, 54) от линий питания (позиции 41, 42) кабеля 11 винтовых движителей (позиции 1, 7, 50, 51) по команде от контроллера (позиции 18, 53) винтовых движителей (позиции 1, 7, 50, 51). Контроллер (позиции 18, 53) и трехфазный коммутатор (позиции 19, 54) выполнены таким образом, чтобы их алгоритмы работы создавали в трехфазной обмотке (позиции 17, 52) и магнитной системе (позиции 30, 57) вращающееся в заданном по команде от рукоятки управления 14 направлении магнитное поле с обратной связью от взаимодействующей с ним магнитной системой на постоянных магнитах (позиции 32, 81), обеспечивая вращение крыльчатки (позиции 31, 60) в том же направлении. Контроллер (позиции 18, 53) винтового движителя выполнен с возможностью обеспечения непрерывной высокоскоростной проверки целостности связи между контроллерами по соответствующим витым парам (позиции 43, 44, 27, 45).
При этом контроллер (позиции 18, 53) винтового движителя выполнен с возможностью того, что его алгоритмы управления обеспечивают непрерывную высокоскоростную проверку целостности связи по цепочке контроллер 25, витая пара 45, блочный контактный герморазъем 40, блока аккумуляторной батареи 9, контактный герморазъем 28, витая пара 27, витая пара 44, контроллер 15, блочные контактные герморазъемы 38, 39, контактный герморазъем 26, витая пара 43, контроллер движителя (позиции 18, 53) и в случае ее разрыва во время работы винтового движителя (нештатное рассоединение любого из блочных контактных и контактных герморазъемов 26, 28, 38, 39, 40) мгновенно, за время t<1 мс, подает команду на размыкание электронного реле (позиции 20, 55), что гарантирует предотвращение дугового подгорания линий питания герморазъемов от потребляемого винтовым движителем тока.
Винтовые движители (позиции 1, 7, 50, 51), блок управления 8, блок аккумуляторной батареи 9, кабели движителей 11 и кабель аккумулятора 10 выполнены в герметичном подводном исполнении. Причем каждый кабель движителя 11 через герморазъемы 26 подключен к соответствующим блочным контактным герморазъемам (позиции 38, 39) блока управления 8.
Кабель аккумулятора 10 через свой контактный герморазъем (28) подключен к блочному контактному герморазъему 40 блока аккумуляторной батареи 9.
УПВ функционирует следующим образом (см. фиг. 1-18).
По первому варианту работа устройства осуществляется следующим образом. Производят зарядку блока аккумуляторной батареи 9, контролируя готовность по появлению зеленого свечения индикатора заряда аккумулятора 13.
Водолаз в гидрокостюме застегивает на себе и регулирует соединенные правым и левым поворотными кронштейнами (позиции 5, 6) поясной ремень 2, правый и левый бедренные ремни (позиции 2, 3) с винтовыми движителями (позиции 1, 7), блоком управления 8 и блоком аккумуляторной батареи 9. Соединяет контактные герморазъемы 26 кабелей винтовых движителей 11 с блочными контактными герморазъемами (позиции 38, 39) блока управления 8, а контактный герморазъем 28 кабеля аккумулятора 10 с блочным контактным герморазъемом 40 блока аккумуляторной батареи 9. После чего водолаз осуществляет погружение в воду.
В УПВ информационная шина в виде соединенных в единую целую витую пару отрезков витых пар проводов 43, 44, 27, 45 функционирует следующим образом. Отрезки витых пар проводов 43, 44, 27, 45 находятся соответственно в составе кабелей винтовых движителей 11, блока управления 8, кабеля аккумулятора 10, блока аккумуляторной батареи 9. С ее помощью информационно соединены между собой контроллер 15, блока управления 8, контроллер 25 блока аккумуляторной батареи 9 и контроллеры движителей 18. Ведущим контроллером является контроллер 15, а ведомыми контроллер 25 и контроллеры винтовых движителей 18. Контроллер 15 опрашивает контроллер 25 и контроллеры винтовых движителей 18 с частотой не реже t<l мс. Он получает команды от рукоятки управления 14, кнопки управления 12 и выдает информацию о заряде блока аккумуляторной батареи 9 на индикатор заряда аккумулятора 13. Информацию об уровне заряда аккумулятора 16 он получает от контроллера 25 блока аккумуляторной батареи 9. Ведомый контроллер 18 выполнен с возможностью того, что его встроенный алгоритм управления, обеспечивает непрерывное отслеживание запросов ведущего контроллера 15 блока управления 8 и в случае отсутствия таких запросов за время t>1 мс (нештатное рассоединение любого из контактных и контактных блочных герморазъемов (позиции 26, 28, 40, 38, 39)) мгновенно, за время t<1 мс, подает команду на размыкание электронного реле 20, что предотвращает дуговое подгорание линий питания герморазъемов от потребляемого винтовым движителем (позиция 1, 7) тока.
При зеленом свечении индикатора заряда аккумулятора 13 водолаз включает кнопку включения 12 блока управления 8. Далее водолаз занимает исходное положение для плавания и устанавливает рукояткой управления 14 направление и скорость вращения крыльчаток 31 винтовых движителей (позиции 1, 7), а значит величину и направление их тяги (упора). Далее движение в воде осуществляется с регулировкой скорости рукояткой управления 14.
Поток воды, создаваемый крыльчатками 31, спрямляется профилированными пилонами 49 и 48, являющимися соответственно входным и выходными направляющими аппаратами, что обеспечивает его ламинарный характер. Кроме того, примененный винтовой движитель (позиции 1, 7) имеет сравнительно низкие рабочие обороты вращения, что обеспечивает отсутствие кавитации. Ламинарный поток и безкавитационный характер движения лопастей крыльчатки 31 обеспечивает низкий уровень гидроакустического шума винтовых движителей (позиции 1, 7), и соответственно всего УПВ.
При этом выполняется периодический визуальный контроль заряда аккумулятора. При желтом свечении остается мало заряда, при красном – следует заменить батарею.
Замену батареи проводят при выключенной кнопке включения 12 блока управления 8.
В случае нештатного отсоединения батареи или любого из блочных контактных герморазъемов во время работы винтовых движителей (позиции 1, 7) срабатывает быстродействующая их защита и протекание через разъемы больших токов, образующих электрическую дугу, исключается.
По второму варианту работа устройства осуществляется следующим образом.
Производят зарядку блока аккумуляторной батареи 9, контролируя готовность по появлению зеленого свечения индикатора заряда аккумулятора 13.
Водолаз в гидрокостюме застегивает на себе и регулирует соединенные правым и левым поворотными кронштейнами (позиции 5, 6) поясной ремень 2, правый и левый бедренные ремни (позиции 2, 3) с винтовыми движителями (позиции 50, 51), блоком управления 8 и блоком аккумуляторной батареи 9. Соединяет контактные герморазъемы 26 кабелей винтовых движителей 11 с блочными контактными герморазъемами (позиции 38, 39) блока управления 8, а контактный герморазъем 28 кабеля аккумулятора 10 с блочным контактным герморазъемом 40 блока аккумуляторной батареи 9. После чего водолаз осуществляет погружение в воду.
В УПВ информационная шина в виде соединенных в единую целую витую пару отрезков витых пар проводов 43, 44, 27, 45 функционирует следующим образом. Отрезки витых пар проводов 43, 44, 27, 45 находятся соответственно в составе кабелей винтовых движителей 11, блока управления 8, кабеля аккумулятора 10, блока аккумуляторной батареи 9. С ее помощью информационно соединены между собой контроллер 15, блока управления 8, контроллер 25 блока аккумуляторной батареи 9 и контроллеры винтовых движителей 53. Ведущим контроллером является контроллер 15, а ведомыми контроллер 25 и контроллеры винтовых движителей 53. Контроллер 15 опрашивает контроллер 25 и контроллеры винтовых движителей 18 с частотой не реже t<l мс. Он получает команды от рукоятки управления 14, кнопки управления 12 и выдает информацию о заряде блока аккумуляторной батареи 9 на индикатор заряда аккумулятора 13. Информацию об уровне заряда аккумулятора 16 он получает от контроллера 25 блока аккумуляторной батареи 9. Ведомый контроллер 53 выполнен с возможностью того, что его встроенный алгоритм управления, обеспечивает непрерывное отслеживание запросов ведущего контроллера 15 блока управления 8 и в случае отсутствия таких запросов за время t>1 мс (нештатное рассоединение любого из блочных контактных и контактных герморазъемов (позиции 26, 40, 38, 39)) мгновенно, за время t<1 мс, подает команду на размыкание электронного реле 55, что гарантирует предотвращение дугового подгорания линий питания герморазъемов от потребляемого винтовым движителем тока.
При зеленом свечении индикатора заряда аккумулятора 13 водолаз включает кнопку включения 12 блока управления 8. Далее водолаз занимает исходное положение для плавания и устанавливает рукояткой управления 14 направление и скорость вращения крыльчаток 60 винтовых движителей (позиции 50, 51), а значит величину и направление их тяги (упора). Далее движение в воде осуществляется с регулировкой скорости рукояткой управления 14.
Поток воды, создаваемый крыльчаткой 60, спрямляется кольцевым обтекателем 73 и профилированными пилонами 82 и 83 соответственно передней 85 и задней 86 профилированных крышек, являющихся соответственно входным и выходными направляющими аппаратами винтового движителя, что обеспечивает ламинарный характер потока воды.
Кроме того, используемый винтовой движитель (позиции 50, 51) за счет применения встроенного редуктора 71 имеет сравнительно низкие рабочие обороты вращения (обороты не более 1200 об/мин), что обеспечивает отсутствие кавитации. Ламинарный поток и безкавитационный характер движения лопастей крыльчатки 60 обеспечивают низкий уровень гидроакустического шума винтовых движителей (позиции 50, 51), и соответственно всего УПВ. То есть преимущество данного устройства достигается тем, что применены низкооборотные винтовые движители, в каждом из которых крыльчатка приводится во вращение через магнитную муфту от находящихся в герметичном отсеке бесколлекторного электродвигателя с редуктором и платой управления. Кроме того, каждый винтовой движитель снабжен передней и задней профилированными крышками с профилированными пилонами, что делает поток через него ламинарным. Это значительно снижает гидроакустический шум.
Кроме того, выполняется периодический визуальный контроль заряда аккумулятора. При желтом свечении остается мало заряда, при красном следует заменить батарею.
Замену батареи проводят при выключенной кнопке включения 12 блока управления 8. В случае нештатного отсоединения батареи или любого из блочных контактных герморазъемов во время работы винтовых движителей (позиции 50, 51) срабатывает быстродействующая их защита и протекание через разъемы больших токов, образующих электрическую дугу, исключается.
Таким образом, конструктивные элементы заявленной группы устройства для передвижения водолазов под водой обеспечивают безопасность работы устройства и высокий КПД его винтовых движителей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Комплекс дистанционного коррозионного мониторинга подводных трубопроводов | 2016 |
|
RU2625696C1 |
| ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ | 2017 |
|
RU2643059C1 |
| Система управления и передачи вращательного момента на винт(ы) в беспилотных летательных аппаратах (БПЛА), стартер-генератор, плата управления стартером-генератором и амортизатор для этой системы | 2020 |
|
RU2741136C1 |
| Автоматизированный программно-аппаратный комплекс для заряда и тренировки аккумуляторных батарей | 2019 |
|
RU2713773C1 |
| БУКСИРОВЩИК ВОДОЛАЗА | 2014 |
|
RU2545244C1 |
| Способ накопления и стабилизации вырабатываемого напряжения бесколлекторным генератором в составе гибридной силовой установки | 2018 |
|
RU2708118C1 |
| Роботизированный мишенный комплекс для тренировки тактики боя в условиях полигона | 2021 |
|
RU2770713C1 |
| УСТРОЙСТВО БЕСПЕРЕБОЙНОГО ВТОРИЧНОГО ЭЛЕКТРОПИТАНИЯ | 2022 |
|
RU2806782C1 |
| Малогабаритное бортовое радиоэлектронное устройство для управления пилотажно-навигационным комплексом беспилотного летательного аппарата | 2021 |
|
RU2799748C2 |
| Система зарядки и способ управления зарядкой батареи электротранспортного средства | 2021 |
|
RU2797370C1 |





Группа изобретений относится к области водолазной техники, в частности к подводным транспортным средствам для автономного передвижения водолазов под водой. В первом варианте устройство для передвижения водолаза под водой (УПВ), содержащее поясной и бедренные ремни, выполненные с возможностью их крепления на теле водолаза, винтовые движители, аккумуляторные батареи, блок управления и водонепроницаемые кабели. При этом бедренные ремни крепятся посредством правого и левого поворотного кронштейна соответственно к правой и левой стороне поясного ремня, а на правой и левой сторонах бедренных ремней крепятся соответствующие винтовые движители. На поясном ремне закреплены блок управления и блок аккумуляторной батареи. Блок управления содержит контроллер, рукоятку управления, кнопку включения, индикатор заряда аккумулятора, причем выход рукоятки управления соединен с первым входом контроллера, выход кнопки включения соединен со вторым входом контроллера, вход индикатора заряда аккумулятора соединен с первым выходом контроллера. К корпусу через профилированные пилоны, являющиеся выходным направляющим аппаратом винтового движителя, прикреплены первый подшипник и крышка, к которой через профилированные пилоны, являющиеся входным направляющим аппаратом винтового движителя, прикреплен второй подшипник. В подшипниках установлены крыльчатка, по окружности которой смонтирована магнитная система на постоянных магнитах, причем крыльчатка с магнитной системой на постоянных магнитах образует ротор бесколлекторного трехфазного двигателя, а магнитная система с трехфазной обмоткой и платой управления образуют статор. Во втором варианте каждый винтовой движитель состоит из герметичного отсека, внутри которого размещены плата управления, ведущая полумуфта магнитной муфты, редуктор и бесколлекторный электродвигатель, содержащий кольцевой статор с вмонтированной в него магнитной системой с трехфазной обмоткой и установленный внутри статора через его крышки на подшипниках выходной вал с закрепленной на нем магнитной системой на постоянных магнитах. Причем герметичный отсек образован корпусом с приливами, с вставленными в него на уплотнениях и закрепленных винтами верхней крышкой с гермовводом и нижней крышкой с установленным на ней посредством уплотнения и винтов магнитопроницаемым герметизирующим стаканом, причем на стакане соосно установлена ось, на которой через подшипник скольжения установлена крыльчатка с закрепленной внутри нее ведомой полумуфтой магнитной муфты. К приливам корпуса винтами коаксиально прикреплен кольцевой обтекатель, к которому защелками присоединены передняя и задняя профилированные крышки с профилированными пилонами. Ведущая полумуфта магнитной муфты закреплена на нижней крышке в подшипнике и соединена с выходом редуктора, вход которого соединен с выходным валом бесколлекторного электродвигателя, коаксиально расположенные ведущая полумуфта и ведомая полумуфта магнитной муфты выполнены с возможностью передачи вращающего момента с ведущей полумуфты посредством магнитного поля через магнитопроницаемый стакан на ведомую полумуфту и на крыльчатку. Плата управления содержит трехфазный коммутатор, контроллер винтового движителя и электронное реле питания. Причем вход и выход контроллера винтового движителя соединен с входом и выходом трехфазного коммутатора. К каждому винтовому движителю через гермоввод присоединен кабель винтового движителя с контактным герморазъемом, вход контроллера винтового движителя подключен к витой паре кабеля винтового движителя, входы трехфазной обмотки присоединены к соответствующим выходам трехфазного коммутатора, входы которого присоединены к выходам электронного реле. Достигается безопасность работы устройства и высокий КПД винтового движителя при значительном снижении гидроакустического шума. 2 н. и 1 з.п. ф-лы, 18 ил.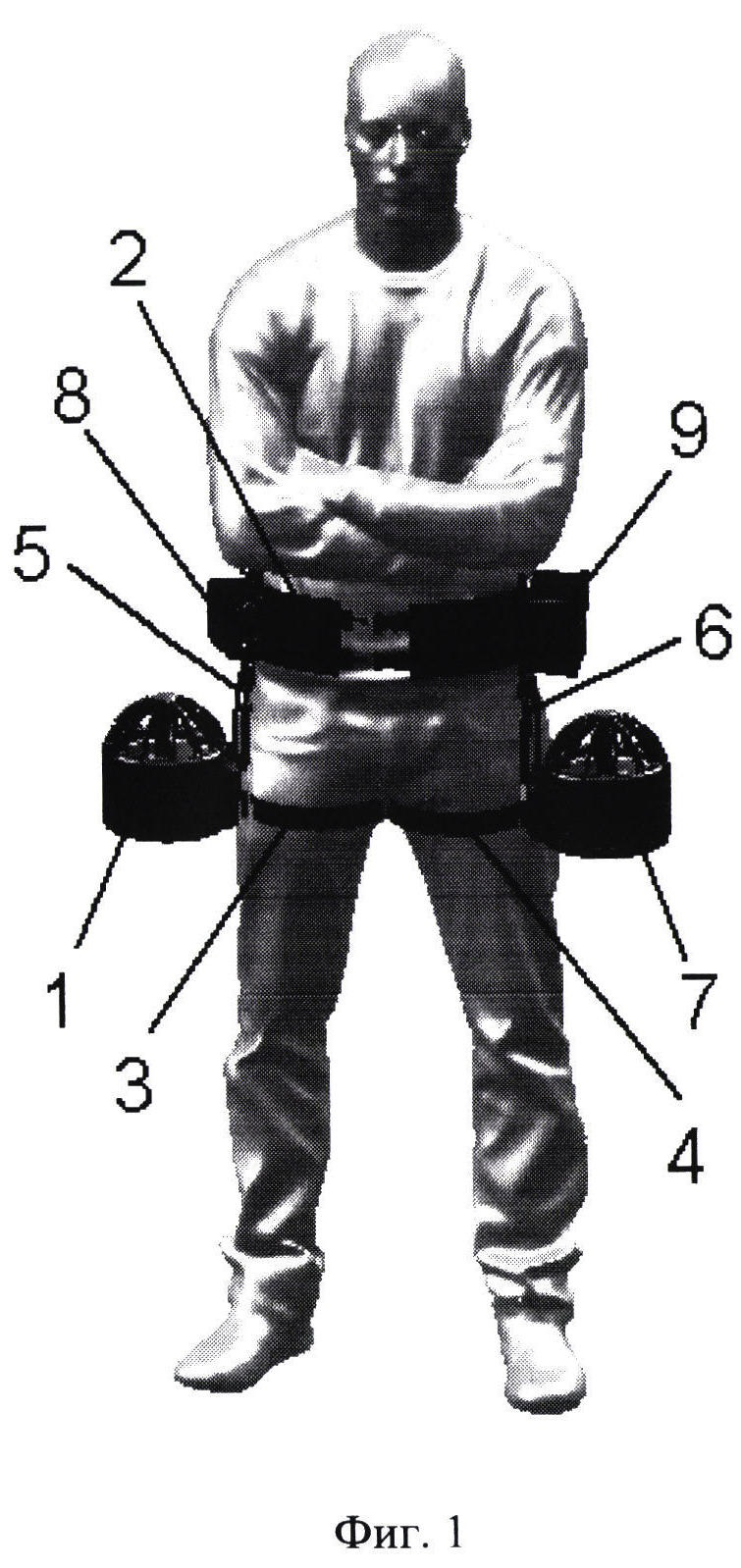
1. Устройство для передвижения водолаза под водой (УПВ), содержащее поясной и бедренные ремни, выполненные с возможностью их крепления на теле водолаза, винтовые движители, аккумуляторные батареи, блок управления и водонепроницаемые кабели, отличающееся тем, что бедренные ремни крепятся посредством правого и левого поворотного кронштейна соответственно к правой и левой стороне поясного ремня, а на правой и левой сторонах бедренных ремней крепятся соответствующие винтовые движители, на поясном ремне закреплены блок управления и блок аккумуляторной батареи, блок управления содержит контроллер, рукоятку управления, кнопку включения, индикатор заряда аккумулятора, причем выход рукоятки управления соединен с первым входом контроллера, выход кнопки включения соединен со вторым входом контроллера, вход индикатора заряда аккумулятора соединен с первым выходом контроллера, в свою очередь блок аккумуляторной батареи содержит аккумулятор и контроллер, а каждый винтовой движитель представляет собой совмещенный с гребным винтом бесколлекторный трехфазный низкооборотный электродвигатель и состоит из корпуса с вмонтированной в него магнитной системой с трехфазной обмоткой и платы управления, к корпусу через профилированные пилоны, являющиеся выходным направляющим аппаратом винтового движителя, прикреплены первый подшипник и крышка, к которой через профилированные пилоны, являющиеся входным направляющим аппаратом винтового движителя, прикреплен второй подшипник, в подшипниках установлена крыльчатка, по окружности которой смонтирована магнитная система на постоянных магнитах, причем крыльчатка с магнитной системой на постоянных магнитах образует ротор бесколлекторного трехфазного двигателя, а магнитная система с трехфазной обмоткой и платой управления образуют статор, плата управления содержит трехфазный коммутатор, контроллер винтового движителя и электронное реле питания, причем вход и выход контроллера винтового движителя соединен с входом и выходом трехфазного коммутатора, водонепроницаемые кабели движителей, кабель аккумулятора через блочные контактные герморазъемы соединены с блоком управления, контроллер блока управления коммутирует с контроллером блока аккумуляторной батареи и контроллерами винтовых движителей и подключенных к ним соответственно рукоятки управления, кнопки включения, индикатора заряда аккумулятора, аккумулятора, платы управления, трехфазного коммутатора и электронного реле питания посредством информационной шины, выполненной на основе витой пары двухпроводного интерфейса, линий питания и блочных контактных и контактных герморазъемов, витая пара блока управления соединена с третьим входом контроллера блока управления, витой парой кабеля аккумулятора и соответствующими блочными контактными герморазъемами, линии питания блока управления соединены с соответствующими линиями питания кабеля аккумулятора, входами контроллера блока управления и соответствующими блочными контактными герморазъемами, витая пара блока аккумуляторной батареи соединена с входом контроллера блока аккумуляторной батареи и с соответствующим блочным контактным герморазъемом, линии питания блока аккумуляторной батареи соединены с соответствующим выходом аккумулятора, входом контроллера блока аккумуляторной батареи и с соответствующим блочным контактным герморазъемом, к каждому винтовому движителю через гермоввод присоединен кабель винтового движителя с контактным герморазъемом, вход контроллера винтового движителя подключен к витой паре кабеля винтового движителя, входы трехфазной обмотки присоединены к соответствующим выходам трехфазного коммутатора, входы которого присоединены к выходам электронного реле, причем электронное реле выполнено с возможностью мгновенного отключения трехфазного коммутатора от линий питания кабеля винтового движителя по команде от контроллера винтового движителя, контроллер винтового движителя и трехфазный коммутатор выполнены таким образом, чтобы их алгоритмы работы создавали в трехфазной обмотке и магнитной системе вращающееся в заданном по команде от рукоятки управления направлении магнитное поле с обратной связью от взаимодействующей с ним магнитной системой на постоянных магнитах, обеспечивая вращение крыльчатки в том же направлении, контроллер винтового движителя выполнен с возможностью обеспечения непрерывной высокоскоростной проверки целостности связи между контроллерами по соответствующим витым парам.
2. Устройство для передвижения водолаза под водой (УПВ), содержащее поясной и бедренные ремни, выполненные с возможностью их крепления на теле водолаза, винтовые движители, аккумуляторные батареи, блок управления и водонепроницаемые кабели, отличающееся тем, что бедренные ремни крепятся посредством правого и левого поворотного кронштейна соответственно к правой и левой стороне поясного ремня, а на правой и левой сторонах бедренных ремней крепятся соответствующие винтовые движители, на поясном ремне закреплены блок управления и блок аккумуляторной батареи, блок управления содержит контроллер, рукоятку управления, кнопку включения, индикатор заряда аккумулятора, причем выход рукоятки управления соединен с первым входом контроллера, выход кнопки включения соединен со вторым входом контроллера, вход индикатора заряда аккумулятора соединен с первым выходом контроллера, в свою очередь блок аккумуляторной батареи содержит аккумулятор и контроллер, а каждый винтовой движитель состоит из герметичного отсека, внутри которого размещены плата управления, ведущая полумуфта магнитной муфты, редуктор и бесколлекторный электродвигатель, содержащий кольцевой статор с вмонтированной в него магнитной системой с трехфазной обмоткой и установленный внутри кольцевого статора через его крышки на подшипниках выходной вал с закрепленной на нем магнитной системой на постоянных магнитах, причем герметичный отсек образован корпусом с приливами, с вставленными в него на уплотнениях и закрепленных винтами верхней крышкой с гермовводом и нижней крышкой с установленным на ней посредством уплотнения и винтов магнитопроницаемым герметизирующим стаканом, причем на стакане соосно установлена ось, на которой через подшипник скольжения установлена крыльчатка с закрепленной внутри нее ведомой полумуфтой магнитной муфты, к приливам корпуса винтами коаксиально прикреплен кольцевой обтекатель, к которому защелками присоединены передняя и задняя профилированные крышки с профилированными пилонами, ведущая полумуфта магнитной муфты закреплена на нижней крышке в подшипнике и соединена с выходом редуктора, вход которого соединен с выходным валом бесколлекторного электродвигателя, коаксиально расположенные ведущая полумуфта и ведомая полумуфта магнитной муфты выполнены с возможностью передачи вращающего момента с ведущей полумуфты посредством магнитного поля через магнитопроницаемый стакан на ведомую полумуфту и на крыльчатку, плата управления содержит трехфазный коммутатор, контроллер винтового движителя, электронное реле питания, причем вход и выход контроллера винтового движителя соединен с входом и выходом трехфазного коммутатора, водонепроницаемые кабели винтовых движителей, кабель аккумулятора через блочные контактные герморазъемы соединены с блоком управления, контроллер блока управления коммутирует с контроллером блока аккумуляторной батареи и контроллерами винтовых движителей и подключенных к ним соответственно рукоятки управления, кнопки включения, индикатора заряда аккумулятора, аккумулятора, платы управления, трехфазного коммутатора и электронного реле питания посредством информационной шины, выполненной на основе витой пары двухпроводного интерфейса, линий питания и блочных контактных и контактных герморазъемов, витая пара блока управления соединена с третьим входом контроллера блока управления, витой парой кабеля аккумулятора и соответствующими блочными контактными герморазъемами, линии питания блока управления соединены с соответствующими линиями питания кабеля аккумулятора, входами контроллера блока управления и соответствующими блочными контактными герморазъемами, витая пара блока аккумуляторной батареи соединена с входом контроллера блока аккумуляторной батареи и с соответствующим блочным контактным герморазъемом, линии питания блока аккумуляторной батареи соединены с соответствующим выходом аккумулятора, входом контроллера блока аккумуляторной батареи и с соответствующим блочным контактным герморазъемом, к каждому винтовому движителю через гермоввод присоединен кабель винтового движителя с контактным герморазъемом, вход контроллера винтового движителя подключен к витой паре кабеля винтового движителя, входы трехфазной обмотки присоединены к соответствующим выходам трехфазного коммутатора, входы которого присоединены к выходам электронного реле питания, причем электронное реле питания выполнено с возможностью мгновенного отключения трехфазного коммутатора от линий питания кабеля винтового движителя по команде от контроллера винтового движителя, контроллер винтового движителя и трехфазный коммутатор выполнены таким образом, чтобы их алгоритмы работы создавали в трехфазной обмотке и магнитной системе вращающееся в заданном по команде от рукоятки управления направлении магнитное поле с обратной связью от взаимодействующей с ним магнитной системой на постоянных магнитах, обеспечивая вращение бесколлекторного электродвигателя и крыльчатки в заданном направлении, контроллер винтового движителя выполнен с возможностью обеспечения непрерывной высокоскоростной проверки целостности связи между контроллерами по соответствующим витым парам.
3. Устройство по любому из пп.1 или 2, отличающееся тем, что винтовые движители, блок управления, блок аккумуляторной батареи, кабели движителей и аккумулятора выполнены в герметичном подводном исполнении.
| БУКСИРОВЩИК ВОДОЛАЗА | 2006 |
|
RU2330782C2 |
| US 10556151 B1, 11.02.2020 | |||
| US 2011174209 A1, 21.07.2011 | |||
| WO 2019028968 A1, 14.02.2019. | |||

