ОБЛАСТЬ ТЕХНИКИ
[0001]
Настоящее изобретение относится к способу управления указателем поворота и устройству управления указателем поворота.
УРОВЕНЬ ТЕХНИКИ
[0002]
Известна технология ведения (навигации) по маршруту на круговом перекрестке, которая отображает стрелку, указывающую направление движения к дороге, чтобы выехать в каждом месте ответвления в соответствующую соединенную дорогу.
СПИСОК ЦИТАТ
ПАТЕНТНАЯ ЛИТЕРАТУРА
[0003]
Патентный документ 1: Публикация японской нерассмотренной патентной заявки № 2001-336944
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
ТЕХНИЧЕСКАЯ ПРОБЛЕМА
[0004]
Вышеуказанная технология относится к ведению по маршруту на круговом перекрестке, называемом перекресток с круговым движением. Правила на перекрестке с круговым движением обычно отличаются от правил на других перекрестках, таких как пересечение дорог. Вышеуказанная технология может быть неприменима к указанию направления на перекрестке с круговым движением при соблюдении правил перекрестка с круговым движением.
[0005]
Чтобы решить вышеупомянутую традиционную проблему, настоящее изобретение предоставляет способ управления указателем поворота и устройство управления указателем поворота, позволяющие указывать направление следуя правилам соответствующего перекрестка с круговым движением.
ТЕХНИЧЕСКОЕ РЕШЕНИЕ
[0006]
Способ управления указателем поворота в соответствии с одним аспектом настоящего изобретения получает местоположение въездной дороги и местоположение выездной дороги перекрестка с круговым движением, определенных для нахождения на предполагаемом маршруте движения транспортного средства, и определяет необходимость указания поворота при выезде на перекресток с круговым движением в соответствии с взаимным расположением местоположения въездной дороги и местоположения выездной дороги.
ПРЕИМУЩЕСТВЕННЫЕ ЭФФЕКТЫ
[0007]
Настоящее изобретение позволяет указывать поворот следуя правилам соответствующего перекрестка с круговым движением.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0008]
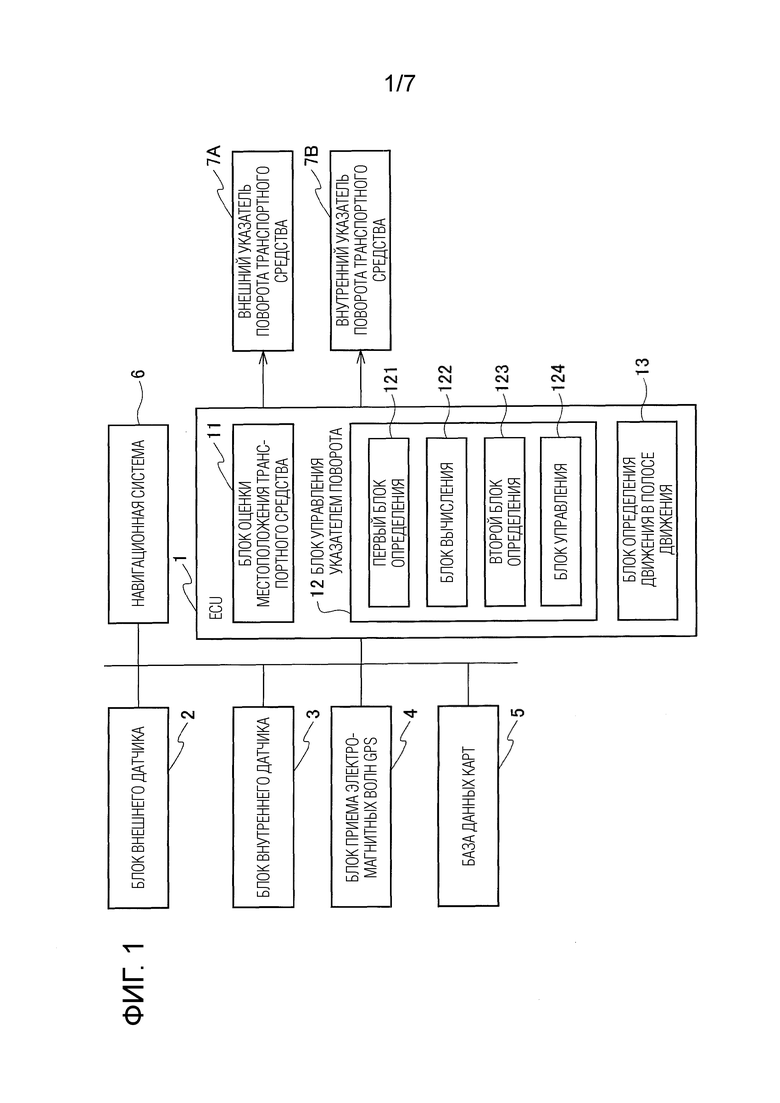
[Фиг. 1] Фиг. 1 является функциональной блок-схемой, иллюстрирующей часть транспортного средства, оборудованного устройством управления указателем поворота, согласно варианту осуществления настоящего изобретения.
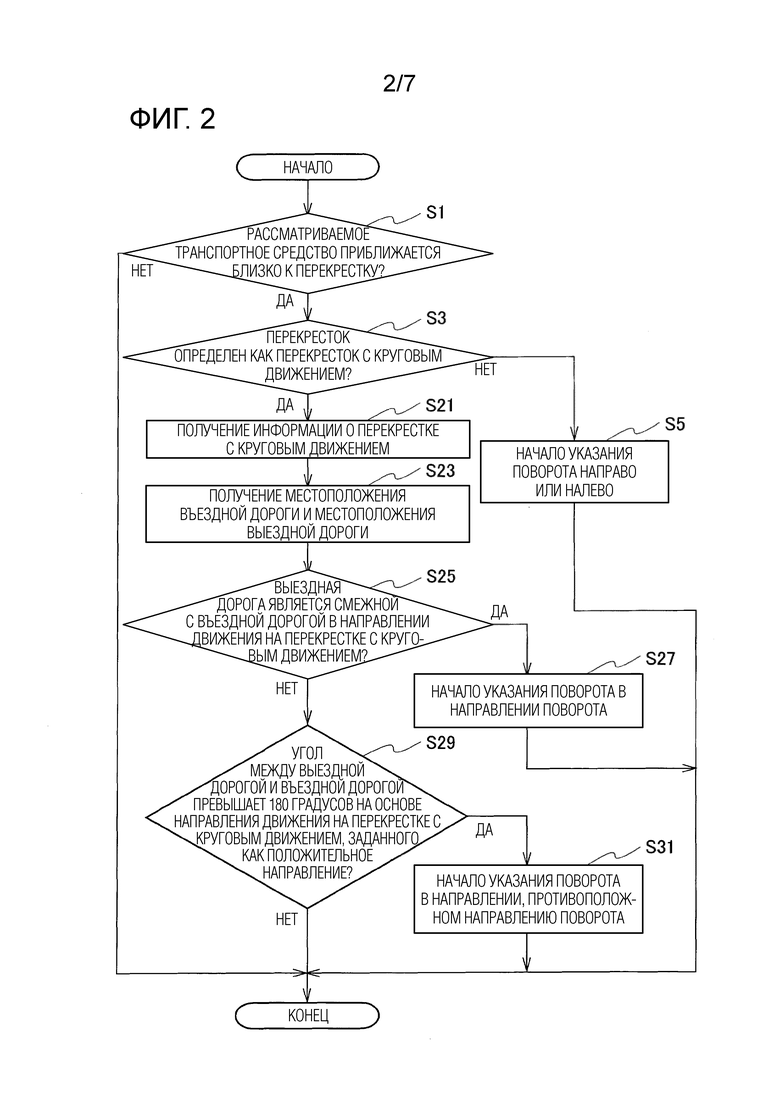
[Фиг. 2] Фиг. 2 является блок-схемой последовательности операций для объяснения способа управления указателем поворота, выполняемого блоком 12 управления указателем поворота.
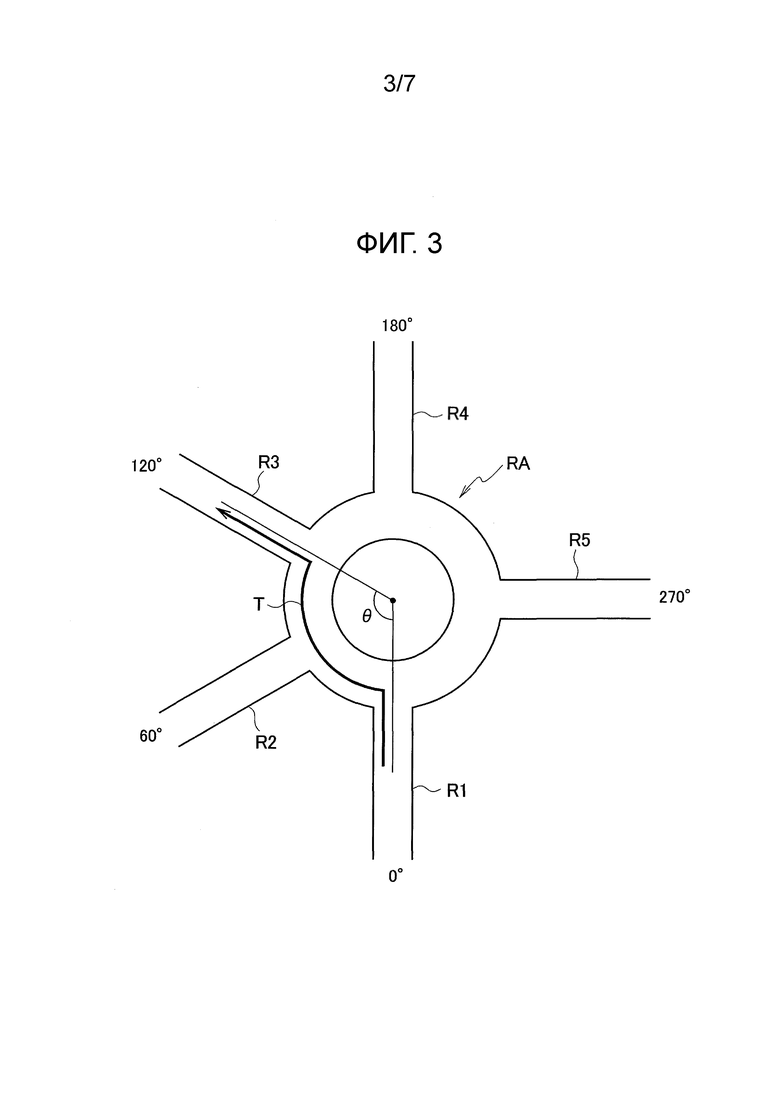
[Фиг. 3] Фиг. 3 является схемой, поясняющей азимут между дорогами, соединенными перекрестком с круговым движением.
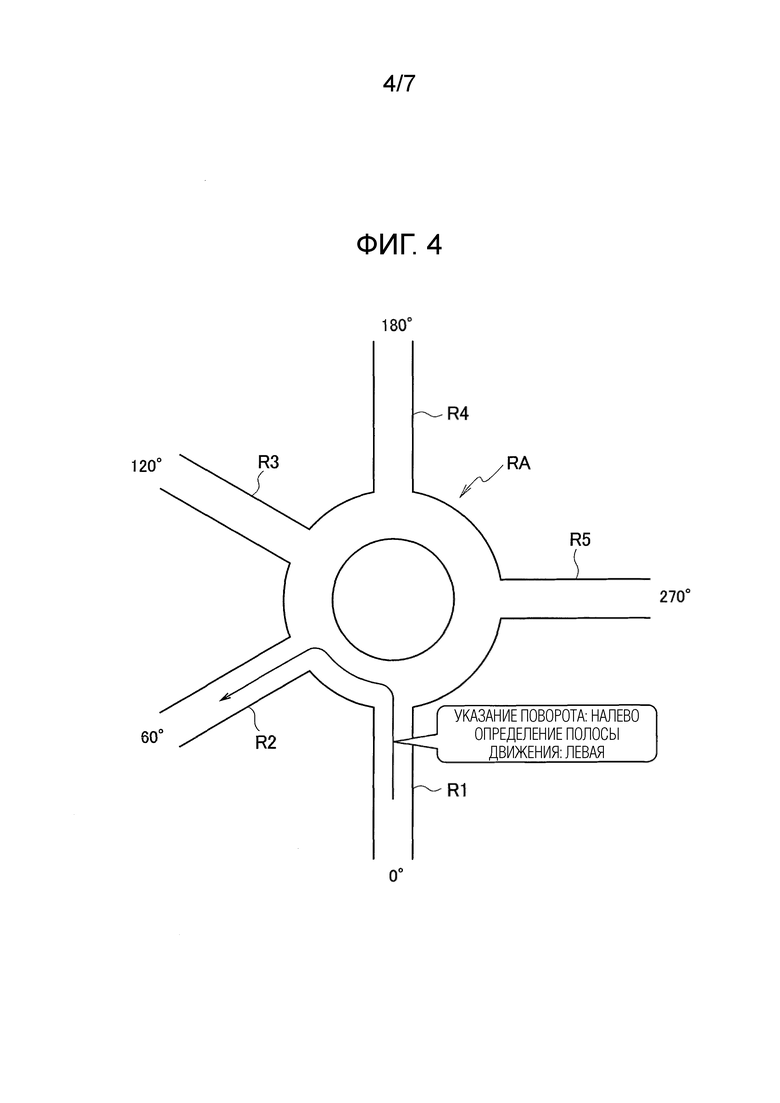
[Фиг. 4] Фиг.4 является схемой, иллюстрирующей конкретный пример указания поворота и определения полосы движения, когда выездная дорога находится рядом с выездной дорогой.
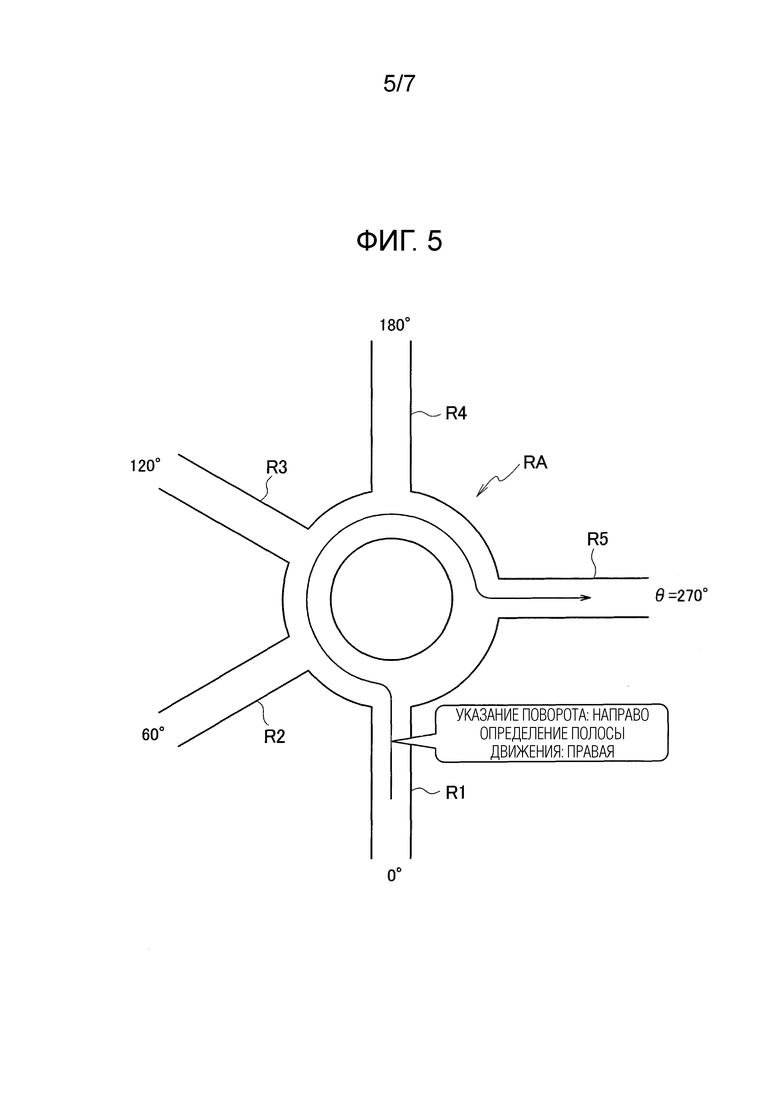
[Фиг. 5] Фиг. 5 является схемой, иллюстрирующей конкретный пример указания поворота и определения полосы движения, когда угол между выездной дорогой и въездной дорогой превышает 180 градусов.
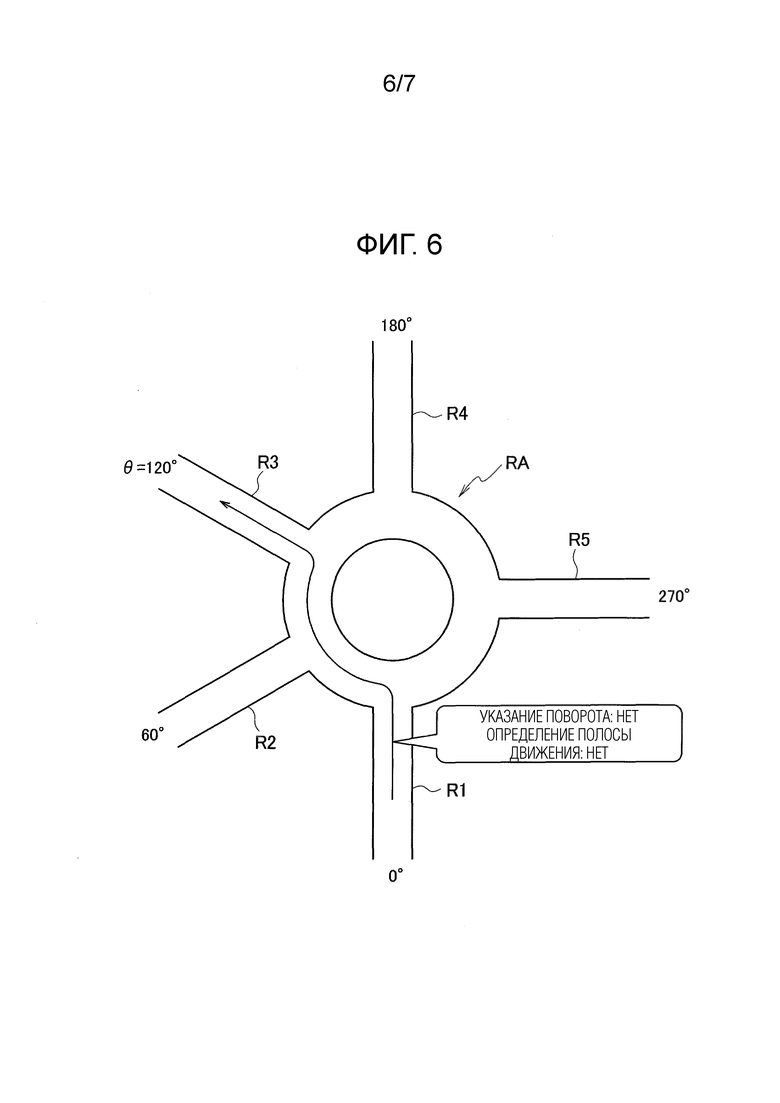
[Фиг. 6] Фиг. 6 является схемой, иллюстрирующей первый конкретный пример указания поворота и определения полосы движения, когда угол между выездной дорогой и въездной дорогой, не смежных друг с другом, составляет 180 градусов или менее.
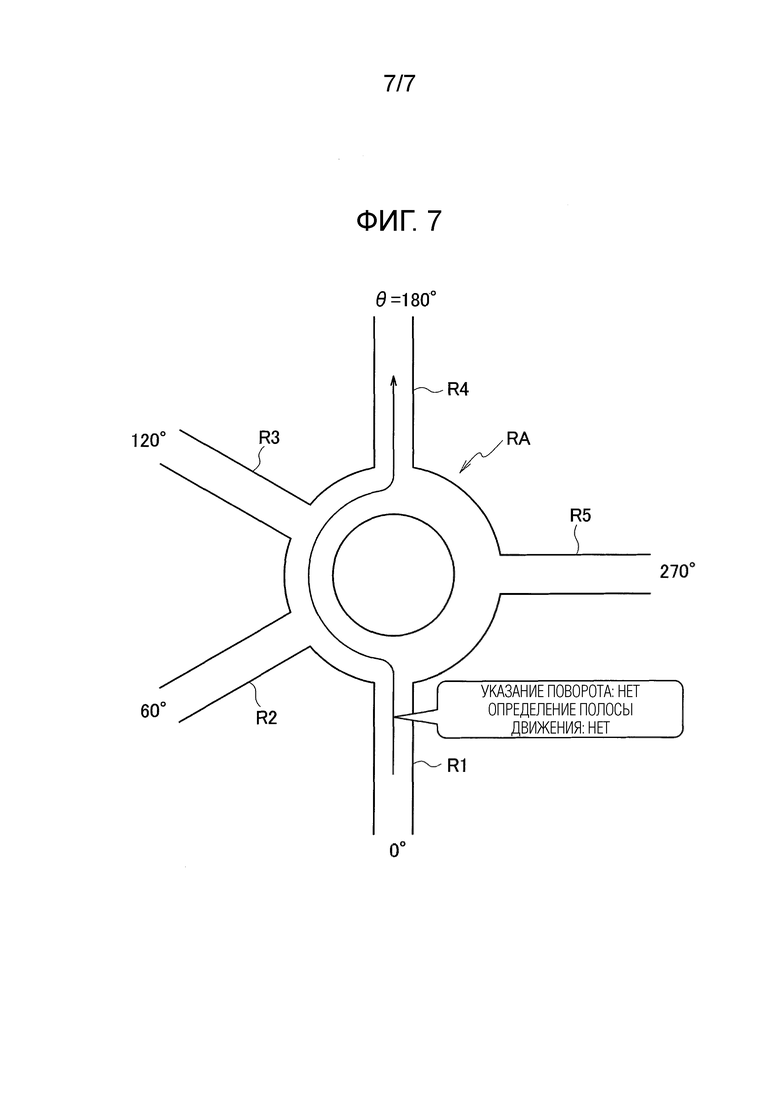
[Фиг. 7] Фиг. 7 является схемой, иллюстрирующей второй конкретный пример указания поворота и определения полосы движения, когда между выездной дорогой и въездной дорогой, не смежной друг с другом, составляет 180 градусов или менее.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0009]
Вариант осуществления настоящего изобретения будет подробно описан ниже со ссылкой на чертежи. Одинаковые элементы обозначены одинаковыми ссылочными позициями, и перекрывающиеся пояснения не повторяются ниже.
[0010]
Транспортное средство, показанное на фиг. 1, включает в себя электронный блок 1 управления (ECU), блок 2 внешнего датчика, блок 3 внутреннего датчика, блок 4 приема электромагнитных волн глобальной системы позиционирования (GPS), базу 5 данных карт, навигационную систему 6, внешний указатель 7А поворота транспортного средства и внутренний указатель 7В поворота транспортного средства. Транспортное средство, показанное на фиг. 1, при необходимости называют «рассматриваемым транспортным средством», чтобы его нельзя было спутать с другими транспортными средствами. Внешний указатель 7А поворота транспортного средства и внутренний указатель 7В поворота транспортного средства также совместно называются «указателями поворота».
[0011]
ECU 1, соответствующий блоку управления (схеме управления) в устройстве управления указателем поворота (устройстве управления), может быть реализован микрокомпьютером, включающим в себя центральный процессор (CPU), память и блок ввода-вывода. Компьютерная программа для изготовления ECU установлена на микрокомпьютере и выполняется так, что микрокомпьютер функционирует как ECU 1. Хотя вариант осуществления иллюстрируется случаем, в котором установлено программное обеспечение для изготовления ECU 1, выделенное аппаратное обеспечение для выполнения каждой обработки информации, как описано ниже, может быть подготовлено для составления ECU 1.
[0012]
Блок 2 внешнего датчика включает в себя радиолокационный блок или камеру (не показана) для получения информации об окружающей обстановке рассматриваемого транспортного средства, чтобы выводить информацию в ECU 1 и навигационную систему 6.
Блок 3 внутреннего датчика включает в себя датчик скорости или датчик угла поворота (не показан) для определения скорости или угла поворота рассматриваемого транспортного средства, чтобы выводить скорость и угол поворота в ECU 1 и навигационную систему 6.
[0013]
Блок 4 приема электромагнитных волн GPS принимает электромагнитные волны от трех или более спутников GPS, чтобы получать информацию о местоположении, указывающую местоположение рассматриваемого транспортного средства, чтобы выводить информацию о местоположении в ECU 1 и навигационную систему 6.
[0014]
База 5 данных карт хранит картографическую информацию об области, в которой должно перемещаться рассматриваемое транспортное средство, так что ECU 1 и навигационная система 6 ссылаются на картографическую информацию. Картографическая информация включает в себя информацию о местоположении дорог и перекрестков. Примеры перекрестков включают крестообразный перекресток, Т-образный перекресток и круговой перекресток, называемый перекрестком с круговым движением.
[0015]
Термин «перекресток с круговым движением» представляет собой перекресток, который представляет собой круговую дорогу (кольцевую дорогу), к которой присоединяются три или более дорог, и в данном документе относится к кольцевой дороге. Картографическая информация включает в себя информацию о перекрестке с круговым движением. Информация о перекрестке с круговым движением включает в себя направление движения рассматриваемого транспортного средства на перекрестке с круговым движением (направление по часовой стрелке или направление против часовой стрелки) и местоположения соответствующих дорог, соединяющихся в перекрестке с круговым движением. Информация о местоположениях соответствующих дорог включает в себя азимуты между дорогами, когда направление движения транспортного средства на перекрестке с круговым движением задано как положительное направление на основе предварительно определенного направления (например, на север) от центрального местоположения кольцевой дороги.
[0016]
Навигационная система 6 представляет собой устройство для ведения рассматриваемого транспортного средства к пункту назначения, установленному находящимся в транспортном средстве человеком, таким как водитель. Навигационная система 6 оценивает местоположение рассматриваемого транспортного средства на основе каждого фрагмента информации, выводимого из блока 2 внешнего датчика, блока 3 внутреннего датчика и блока 4 приема электромагнитных волн GPS, вычисляет предполагаемый маршрут движения к пункту назначения, и ведет рассматриваемое транспортное средство к месту назначения. Навигационная система 6 выводит информацию о предполагаемом маршруте движения в ECU 1.
[0017]
ECU 1 включает в себя блок 11 оценки местоположения транспортного средства, блок 12 управления указателем поворота и блок 13 определения движения в полосе движения.
Блок 11 оценки местоположения транспортного средства оценивает местоположение рассматриваемого транспортного средства на основе каждого фрагмента информации, выводимого из блока 2 внешнего датчика, блока 3 внутреннего датчика и блока 4 приема электромагнитных волн GPS. Блок 12 управления указателем поворота соответствует блоку управления (схеме управления) в устройстве управления указателем поворота (устройстве управления).
[0018]
Блок 12 управления указателем поворота управляет внешним указателем 7А поворота транспортного средства и внутренним указателем 7В поворота транспортного средства в соответствии с информацией о местоположении рассматриваемого транспортного средства, полученной блоком 11 оценки местоположения транспортного средства, картографической информацией в базе 5 данных карт и информацией о предполагаемом маршруте движения, сформированном навигационной системой 6.
[0019]
Блок 12 управления указателем поворота включает в себя первый блок 121 определения (первую схему определения), блок 122 вычисления (схему вычисления), второй блок 123 определения (вторую схему определения) и блок 124 управления (схему управления). Первый блок 121 определения определяет, имеется ли какой-либо перекресток с круговым движением на протяжении предполагаемого маршрута движения, по которому должно двигаться рассматриваемое транспортное средство. Блок 122 вычисления получает въездную дорогу, по которой рассматриваемое транспортное средство въезжает на перекресток с круговым движением, и выездную дорогу, по которой рассматриваемое транспортное средство выезжает с перекрестка с круговым движением, когда определено, что перекресток с круговым движением присутствует на предполагаемом маршруте движения. Второй блок 123 определения определяет, должны ли указатели (7А и 7В) поворота выполнять указание поворота, когда рассматриваемое транспортное средство въезжает на перекресток с круговым движением, в соответствии с взаимным расположением местоположения въездной дороги и местоположения выездной дороги. Блок 124 управления управляет внешним указателем 7А поворота транспортного средства и внутренним указателем 7В поворота транспортного средства.
[0020]
Внешний указатель 7А поворота транспортного средства включает в себя сигнал правого поворота и сигнал левого поворота, установленные во внешних частях рассматриваемого транспортного средства, для указания правого поворота или левого поворота рассматриваемого транспортного средства для других транспортных средств или пешеходов.
Внутренний указатель 7B поворота транспортного средства включает в себя сигнал правого поворота и сигнал левого поворота, установленные в салоне рассматриваемого транспортного средства, для указания правого поворота или левого поворота для находящегося в транспортном средстве человека, такого как водитель.
[0021]
Блок 12 управления указателем поворота управляет внешним указателем 7А поворота транспортного средства и внутренним указателем 7В поворота транспортного средства, чтобы включать соответствующие сигналы правого поворота, тогда как соответствующие сигналы левого поворота находятся в состоянии выключено. Аналогично, блок 12 управления указателем поворота управляет внешним указателем 7А поворота транспортного средства и внутренним указателем 7В поворота транспортного средства, чтобы включать соответствующие сигналы левого поворота, тогда как соответствующие сигналы правого поворота находятся в состоянии выключено. Таким образом, внешний указатель 7А поворота транспортного средства и внутренний указатель 7В поворота транспортного средства работают синхронно.
[0022]
Блок 13 определения движения в полосе движения определяет, движется ли рассматриваемое транспортное средство по надлежащей полосе движения, в соответствии с взаимным расположением дороги, по которой рассматриваемое транспортное средство въезжает на перекресток с круговым движением (въездной дороги), и дороги, по которой рассматриваемое транспортное средство выезжает с перекрестка с круговым движением (выездной дороги), когда въездная дорога включает в себя множество полос движения.
[0023]
Способ управления указателем поворота, выполняемый блоком 12 управления указателем поворота, описан ниже со ссылкой на фиг. 2. Ниже приведена обработка управления в соответствии с вариантом осуществления в случае, когда предполагается, что указателями поворота управляют так, чтобы обеспечить указание поворота в направлении, в котором транспортное средство должно двигаться, когда транспортное средство въезжает в место, в котором дороги соединяются вместе. Например, когда предполагаемый маршрут движения включает в себя перекресток, на котором рассматриваемое транспортное средство должно повернуть направо, указатели поворота на правой стороне автоматически приводятся в действие перед перекрестком. Вариант осуществления иллюстрируется случаем, в котором рассматриваемое транспортное средство движется в соответствии с указанием навигационной системы 6 на основании информации о предполагаемом маршруте движения.
[0024]
Как показано на фиг. 2, блок 12 управления указателем поворота сначала определяет, приближается ли рассматриваемое транспортное средство близко к перекрестку, в соответствии с местоположением рассматриваемого транспортного средства, оцененным модулем 11 оценки местоположения транспортного средства, и картографической информацией базы 5 данных карт (S1). Процесс заканчивается, когда рассматриваемое транспортное средство все еще не близко к перекрестку (S1: НЕТ).
[0025]
Когда рассматриваемое транспортное средство приближается близко к перекрестку (S1: ДА), первый блок 121 определения определяет, является ли перекресток перекрестком с круговым движением (S3). А именно, первый блок 121 определения определяет, присутствует ли перекресток с круговым движением на протяжении предполагаемого маршрута движения, по которому предполагается движение рассматриваемого транспортного средства.
[0026]
Когда перекресток не является перекрестком с круговым движением (S3: НЕТ), блок 124 управления блока 12 управления указателем поворота заставляет внешний указатель 7А поворота транспортного средства и внутренний указатель 7B поворота транспортного средства начать указание поворота направо или налево (S5), чтобы завершить процесс. В частности, на этапе S5 блок 124 управления заставляет внешний указатель 7А поворота транспортного средства и внутренний указатель 7B поворота транспортного средства начать указание поворота направо при повороте направо на перекрестке, и заставляет внешний указатель 7А поворота транспортного средства и внутренний указатель 7B поворота транспортного средства начать указание поворота налево при повороте налево на перекрестке (S5). Затем внешний указатель 7А поворота транспортного средства и внутренний указатель 7В поворота транспортного средства включают сигналы правого поворота при повороте направо на перекрестке и включают сигналы левого поворота при повороте налево на перекрестке.
[0027]
Когда перекресток является перекрестком с круговым движением (S3: ДА), а именно, когда определено, что на предполагаемом маршруте движения присутствует перекресток с круговым движением, блок 12 управления указателем поворота получает информацию о перекрестке с круговым движением из картографической информации (S21).
[0028]
Блок 122 вычисления блока 12 управления указателем поворота затем получает местоположение дороги, по которой рассматриваемое транспортное средство выезжает на перекресток с круговым движением (называемой въездной дорогой), и местоположение дороги, по которой рассматриваемое транспортное средство выезжает с перекрестка с круговым движением (называемой выездной дорогой) в соответствии с информацией о перекрестке с круговым движением и информацией о предполагаемом маршруте движения (S23). Местоположение въездной дороги и местоположение выездной дороги могут быть назначены находящимся в транспортном средстве человеком.
[0029]
Второй блок 123 определения блока 12 управления указателем поворота, затем определяет, должны ли внешний указатель 7А поворота транспортного средства и внутренний указатель 7В поворота транспортного средства выполнить указание поворота, когда рассматриваемое транспортное средство въезжает на перекресток с круговым движением, в соответствии с взаимным расположением местоположения въездной дороги и местоположения выездной дороги.
[0030]
В частности, второй блок 123 определения блока 12 управления указателем поворота определяет, является ли выездная дорога смежной с въездной дорогой в направлении движения на перекрестке с круговым движением (S25). Например, блок 12 управления указателем поворота рассчитывает азимуты (положительные углы) соответствующих дорог (включая выездную дорогу), отличных от въездной дороги, которая, как предполагается, имеет азимут, установленный на ноль (градусов), чтобы выполнить определение на основе соответствующих азимутов (S25).
[0031]
Процесс определения более подробно описан ниже со ссылкой на фиг. 3. Соответствующие дороги R1-R5 соединяются в перекрестке RA с круговым движением. Предполагается, что направление движения на перекрестке RA с круговым движением является направлением по часовой стрелке. Предполагается, что дорога R1 является въездной дорогой.
[0032]
Соответствующие дороги R2-R5, показанные на фиг. 3, последовательно расположены так, что дорога R2 имеет азимут 60 градусов, дорога R3 имеет азимут 120 градусов, дорога R4 имеет азимут 180 градусов, и дорога R5 имеет азимут 270 градусов на основе дороги R1 с азимутом, установленным на ноль градусов. Рассматриваемое транспортное средство должно двигаться вдоль стрелки T, когда дорога R3 считается выездной дорогой. Азимут выездной дороги является углом θ, показанным на фиг. 3, который составляет 120 градусов.
[0033]
Возвращаясь к фиг. 2, определяется, что выездная дорога, имеющая наименьший азимут среди других вычисленных азимутов, является смежной с въездной дорогой в направлении движения (фиг. 2, S25: ДА).
[0034]
Когда выездная дорога определена как смежная с въездной дорогой в направлении движения (S25: ДА), блок 124 управления блока 12 управления указателем поворота заставляет внешний указатель 7А поворота транспортного средства и внутренний указатель 7B поворота транспортного средства начать указание поворота в направлении, в котором должно повернуть рассматриваемое транспортное средство при выезде с перекрестка с круговым движением (S27), чтобы завершить процесс. Направление, в котором должно повернуть транспортное средство при выезде с перекрестка с круговым движением, в дальнейшем называется «направлением поворота». Направление поворота является направлением, в котором транспортное средство должно повернуть, чтобы въехать на выездную дорогу с перекрестка с круговым движением. Блок 12 управления указателем поворота выполняет обработку на этапе S27, когда все еще присутствует на въездной дороге до въезда на перекресток с круговым движением.
[0035]
Направление поворота является направлением налево, когда направление движения является направлением по часовой стрелке, и направление поворота является направлением направо, когда направление движения является направлением против часовой стрелки. На этапе S27 внешний указатель 7А поворота транспортного средства и внутренний указатель 7В поворота транспортного средства включают сигналы левого поворота, когда направление движения является направлением по часовой стрелке, и включают сигналы правого поворота, когда направление движения является направлением против часовой стрелки. Затем рассматриваемое транспортное средство въезжает на перекресток с круговым движением с включенными соответствующими сигналами поворота.
[0036]
Когда выездная дорога определена как не смежная с въездной дорогой в направлении движения (S25: НЕТ), тогда второй блок 123 определения блока 12 управления указателем поворота определяет, превышает ли угол между выездной дорогой и въездной дорогой 180 градусов, на основе направления движения на перекрестке с круговым движением, заданного как положительное направление (S29).
[0037]
В частности, второй блок 123 определения блока 12 управления указателем поворота определяет, больше ли азимут выездной дороги (когда предполагается, что азимут въездной дороги установлен равным нулю градусов), вычисленный на этапе S25, 180 градусов (S29).
[0038]
Когда угол между выездной дорогой и въездной дорогой больше 180 градусов (S29: ДА), блок 124 управления блока 12 управления указателем поворота заставляет внешний указатель 7А поворота транспортного средства и внутренний указатель 7B поворота транспортного средства начать указание поворота в направлении, противоположном направлению поворота (S31), чтобы завершить процесс. Блок 12 управления указателем поворота выполняет обработку на этапе S29, когда все еще присутствует на въездной дороге до въезда на перекресток с круговым движением.
[0039]
Противоположным направлением направления поворота является направление направо, когда направлением движения является направление по часовой стрелке, и противоположным направлением направления поворота является направление налево, когда направлением движения является направление против часовой стрелки. На этапе S29 внешний указатель 7А поворота транспортного средства и внутренний указатель 7В поворота транспортного средства включают сигналы правого поворота, когда направление движения является направлением по часовой стрелке, и включают сигналы левого поворота, когда направление движения является направлением против часовой стрелки. Затем рассматриваемое транспортное средство въезжает на перекресток с круговым движением с оставшимися включенными соответствующими сигналами поворота.
[0040]
Когда угол между выездной дорогой и въездной дорогой составляет 180 градусов или меньше (S29: НЕТ), блок 124 управления блока 12 управления указателем поворота не заставляет внешний указатель 7А поворота транспортного средства или внутренний указатель 7B поворота транспортного средства начать указание поворота, чтобы завершить процесс.
[0041]
Таким образом, рассматриваемое транспортное средство въезжает на перекресток с круговым движением с оставшимися выключенными соответствующими сигналами поворота. Блок 12 управления указателем поворота, таким образом, заставляет указатели поворота приостанавливать указание поворота при въезде на перекресток с круговым движением, а именно запрещает соответствующим указателям поворота выполнять какое-либо указание поворота.
[0042]
Блок 12 управления указателем поворота выполняет процесс, показанный на фиг. 2, на каждом перекрестке на протяжении предполагаемого маршрута движения.
Хотя вариант осуществления не иллюстрирует этап остановки указания поворота на блок-схеме последовательности операций, показанной на фиг. 2, указание поворота может быть остановлено в надлежащий момент времени на основе правил дорожного движения, например, в момент времени после предварительно определенного промежутка времени от начала указания поворота или в момент времени после прохождения перекрестка с круговым движением.
[0043]
Далее описывается работа блока 13 определения движения в полосе движения.
[0044]
Когда въездная дорога включает в себя множество полос движения, и обработка на этапе S25 определяется как ДА, блок 13 определения движения в полосе движения, определяет, находится ли рассматриваемое транспортное средство в полосе движения в направлении поворота. Блок 13 определения движения в полосе движения выполняет определение того, включает ли в себя въездная дорога множество полос движения, на основе картографической информации.
[0045]
Когда направление движения является направлением по часовой стрелке, направление поворота является направлением налево, и тогда блок 13 определения движения в полосе движения определяет, находится ли рассматриваемое транспортное средство в левой полосе движения (например, в самой левой полосе движения).
[0046]
Когда направление движения является направлением против часовой стрелки, направление поворота является направлением направо, и тогда блок 13 определения движения в полосе движения определяет, находится ли рассматриваемое транспортное средство в правой полосе движения (например, в самой правой полосе движения).
[0047]
Когда определено, что рассматриваемое транспортное средство не находится в полосе движения в направлении поворота, блок 13 определения движения в полосе движения побуждает сменить полосу движения в направлении поворота посредством голоса или индикации на экране навигационной системы 6. Это позволяет рассматриваемому транспортному средству въехать на перекресток с круговым движением с надлежащей полосы движения, которая является полосой движения в направлении поворота. Когда определено, что рассматриваемое транспортное средство не находится в полосе движения в направлении поворота, блок 12 управления указателями поворота также может заставлять соответствующие указатели поворота (7А и 7В) выполнять указание поворота направо, когда полоса движения в направлении поворота является правой стороной, или выполнять указание поворота налево, когда полоса движения в направлении поворота является левой стороной, если смотреть со стороны полосы движения, в которой находится рассматриваемое транспортное средство.
[0048]
Когда въездная дорога включает в себя множество полос движения, и обработка на этапе S29 определяется как ДА, блок 13 определения движения в полосе движения определяет, находится ли рассматриваемое транспортное средство в полосе движения в направлении, противоположном направлению поворота.
[0049]
Когда направление движения является направлением по часовой стрелке, направление, противоположное направлению поворота, является направлением направо, и тогда блок 13 определения движения в полосе движения определяет, находится ли рассматриваемое транспортное средство в правой полосе движения (например, в самой правой полосе движения).
[0050]
Когда направление движения является направлением против часовой стрелки, направление, противоположное направлению поворота, является направлением налево, и тогда блок 13 определения движения в полосе движения определяет, находится ли рассматриваемое транспортное средство в левой полосе (например, в крайней левой полосе).
[0051]
Когда определено, что рассматриваемое транспортное средство не находится в полосе движения в направлении, противоположном направлению поворота, блок 13 определения движения в полосе движения побуждает сменить полосу движения в направлении, противоположном направлению поворота, посредством голоса или индикации на экране навигационной системы 6. Это позволяет рассматриваемому транспортному средству въехать на перекресток с круговым движением с надлежащей полосы движения, которая является полосой движения в направлении, противоположном направлению поворота. Когда определено, что рассматриваемое транспортное средство не находится в полосе движения в направлении, противоположном направлению поворота, блок 12 управления указателем поворота также может заставлять соответствующие указатели (7А и 7В) поворота выполнять указание поворота направо, когда полоса движения в направлении, противоположном направлению поворота, является правой стороной, или выполнять указание поворота налево, когда полоса движения в направлении, противоположном направлению поворота, является левой стороной, если смотреть со стороны полосы движения, в которой находится рассматриваемое транспортное средство.
[0052]
Далее конкретные примеры указания поворота и определения полосы движения описаны ниже со ссылкой на чертежи.
Как показано на фиг. 4, когда дорога R2 (выездная дорога) является смежной с дорогой R1 (въездной дорогой) в направлении движения на перекрестке RA с круговым движением, указатель поворота в направлении поворота (налево на фиг. 4) запускается на дороге R1 (въездной дороге). Это позволяет рассматриваемому транспортному средству следовать правилам перекрестка с круговым движением, чтобы начать указание поворота в направлении поворота на въездной дороге, когда выездная дорога является смежной с въездной дорогой в направлении движения. Таким образом, может быть предотвращен въезд рассматриваемого транспортного средства на перекресток с круговым движением без выполнения какого-либо указания поворота или с неправильным выполнением указания поворота в направлении, противоположном направлению поворота.
[0053]
Кроме того, когда определено, что выездная дорога является смежной с въездной дорогой в направлении движения, как показано на фиг. 4, тогда определяется, находиться ли рассматриваемое транспортное средство в полосе движения в направлении поворота (левой полосе движения на Фиг. 4). Рассматриваемое транспортное средство побуждают выполнить смену полосы движения, например, когда оно не расположено в полосе движения в направлении поворота, чтобы въехать на перекресток с круговым движением с надлежащей полосы движения.
[0054]
На фиг. 5 показан случай, когда угол θ между дорогой R5 (выездной дорогой) и дорогой R1 (въездной дорогой) превышает 180 градусов, который в данном случае составляет 270 градусов, на основании направления движения на перекрестке RA с круговым движением, заданном как положительное направление. В этом случае указание поворота в направлении, противоположном направлению поворота (направо на фиг. 5), начинается на дороге R1 (въездной дороге). Это позволяет рассматриваемому транспортному средству следовать правилам перекрестка с круговым движением, чтобы начать указание поворота в направлении, противоположном направлению поворота на въездной дороге, когда угол θ превышает 180 градусов. Таким образом, может быть предотвращен въезд рассматриваемого транспортного средства на перекресток с круговым движением без выполнения какого-либо указания поворота или с неправильным выполнением указания поворота в направлении поворота.
[0055]
Кроме того, когда угол θ превышает 180 градусов, как показано на фиг. 5, тогда определяется, находиться ли рассматриваемое транспортное средство в полосе движения в направлении, противоположном направлению поворота (правой полосе движения на фиг. 5). Рассматриваемое транспортное средство побуждают выполнить смену полосы движения, например, когда оно не расположено в полосе движения в направлении, противоположном направлению поворота, чтобы въехать на перекресток с круговым движением с надлежащей полосы движения.
[0056]
Каждая из фиг. 6 и фиг. 7 показывает случай, в котором угол θ между выездной дорогой (дорога R3 на фиг. 6 и дорога R4 на фиг. 7) и дорогой R1 (въездной дорогой) составляет 180 градусов или меньше на основе направления движения по перекрестку RA с круговым движением, заданного как положительное направление, и в котором выездная дорога (R3, R4) не смежна с въездной дорогой (R1) в направлении движения по перекрестку RA с круговым движением. В каждом случае не допускается указание поворота, когда рассматриваемое транспортное средство въезжает на перекресток RA с круговым движением. Это позволяет рассматриваемому транспортному средству следовать правилам перекрестка с круговым движением, чтобы приостановить указание поворота, когда угол θ составляет 180 градусов или менее, а выездная дорога не смежна с въездной дорогой. Таким образом, может быть предотвращен въезд рассматриваемого транспортного средства на перекресток с круговым движением с выполнением какого-либо указания поворота.
[0057]
Соответствующие случаи, показанные на фиг. 6 и фиг. 7, не выполняют определение, в какой полосе движения находится рассматриваемое транспортное средство. Это позволяет рассматриваемому транспортному средству следовать правилам перекрестка с круговым движением для проезда по любой полосе движения, когда угол θ составляет 180 градусов или менее, а выездная дорога не смежна с въездной дорогой.
[0058]
Каждая из фиг. 4-7 показывает конкретный пример перекрестка с круговым движением, на котором транспортное средство движется по часовой стрелке. Когда транспортное средство движется в направлении против часовой стрелки на перекрестке с круговым движением, дороги от R5 до R2 должны последовательно иметь углы θ, составляющие 90 градусов, 180 градусов, 240 градусов и 300 градусов. Таким образом, определение, выполненное на этапе S29, показанном на фиг. 2, основано на вышеуказанных соответствующих углах θ.
[0059]
Настоящий вариант осуществления, описанный выше, получает местоположение въездной дороги и местоположение выездной дороги, когда на предполагаемом маршруте движения присутствует перекресток с круговым движением, и определяет необходимость указания поворота при въезде на перекресток с круговым движением в соответствии с взаимным расположением местоположения въездной дороги и местоположения выездной дороги. Таким образом, настоящий вариант осуществления обеспечивает возможность надлежащего указания поворота, следуя правилам перекрестка с круговым движением, путем определения необходимости указания поворота при въезде на перекресток с круговым движением на основе взаимного расположения местоположения въездной дороги и местоположения выездной дороги.
[0060]
Настоящий вариант осуществления представляет случай, в котором устройство управления указателем поворота установлено на транспортном средстве в качестве цели для выполнения указания поворота. В качестве альтернативы устройство управления указателем поворота может быть установлено на сервере, способном осуществлять связь с целевым транспортным средством, или установлено на любом другом транспортном средстве, не являющемся целевым транспортным средством, чтобы передавать необходимую информацию и инструкции между сервером или любым другим транспортным средством и целевым транспортным средством, чтобы дистанционно следовать аналогичному способу управления указателем поворота. Сервер и целевое транспортное средство могут связываться друг с другом посредством радиосвязи или связи между транспортным средством и инфраструктурой. Любое другое транспортное средство и целевое транспортное средство могут связываться друг с другом посредством связи между транспортными средствами. Указатели поворота могут мигать, когда схема управления включена (включена), и могут быть выключены, когда схема управления выключена. Например, схема управления может быть настроена на выключение или сохранение состояния выключено, чтобы временно не вводить в действие указание поворота.
[0061]
Хотя вариант осуществления настоящего изобретения был описан выше, следует понимать, что настоящее изобретение не предназначено для ограничения описаниями и чертежами, составляющими часть этого раскрытия. Различные альтернативные варианты осуществления, примеры и технические применения будут очевидны для специалистов в данной области техники в соответствии с этим раскрытием.
СПИСОК ССЫЛОЧНЫХ ПОЗИЦИЙ
[0062]
1 ECU
2 БЛОК ВНЕШНЕГО ДАТЧИКА
3 БЛОК ВНУТРЕННЕГО ДАТЧИКА
4 БЛОК ПРИЕМА ЭЛЕКТРОМАГНИТНЫХ ВОЛН GPS
5 БАЗА ДАННЫХ КАРТ
6 НАВИГАЦИОННАЯ СИСТЕМА
7А ВНЕШНИЙ УКАЗАТЕЛЬ ПОВОРОТА ТРАНСПОРТНОГО СРЕДСТВА (УКАЗАТЕЛЬ ПОВОРОТА)
7B ВНУТРЕННИЙ УКАЗАТЕЛЬ ПОВОРОТА ТРАНСПОРТНОГО СРЕДСТВА (УКАЗАТЕЛЬ ПОВОРОТА)
11 БЛОК ОЦЕНКИ МЕСТОПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА
12 БЛОК УПРАВЛЕНИЯ УКАЗАТЕЛЕМ ПОВОРОТА
13 БЛОК ОПРЕДЕЛЕНИЯ ДВИЖЕНИЯ В ПОЛОСЕ ДВИЖЕНИЯ
121 ПЕРВЫЙ БЛОК ОПРЕДЕЛЕНИЯ
122 БЛОК ВЫЧИСЛЕНИЯ
123 ВТОРОЙ БЛОК ОПРЕДЕЛЕНИЯ
124 БЛОК УПРАВЛЕНИЯ
РА ПЕРЕКРЕСТОК С КРУГОВЫМ ДВИЖЕНИЕМ
от R1 до R5 ДОРОГА
θ азимут
Предложенная группа изобретений относится к средствам управления указателем поворота. Способ управления указателем поворота содержит этапы, на которых: определяют, приближается ли транспортное средство близко к перекрестку; определяют, является ли перекресток перекрестком с круговым движением, когда определено, что транспортное средство находится близко к перекрестку; получают местоположение въездной дороги, по которой транспортное средство въезжает на перекресток с круговым движением, и местоположение выездной дороги, по которой транспортное средство выезжает с перекрестка с круговым движением, когда определено, что перекресток является перекрестком с круговым движением; и определяют, должен ли указатель поворота транспортного средства выполнять указание поворота, когда транспортное средство въезжает на перекресток с круговым движением, в соответствии с взаимным расположением местоположения въездной дороги и местоположения выездной дороги. Также реализован еще один вариант способа управления показателем поворота, а также два варианта устройства управления указателем поворота. Предложенная группа изобретений позволяет получает местоположение въездной дороги и местоположение выездной дороги перекрестка с круговым движением, определенных для нахождения на предполагаемом маршруте движения транспортного средства, и определяет необходимость указания поворота при выезде на перекресток с круговым движением в соответствии с взаимным расположением местоположения въездной дороги и местоположения выездной дороги. 4 н. и 6 з.п. ф-лы, 7 ил.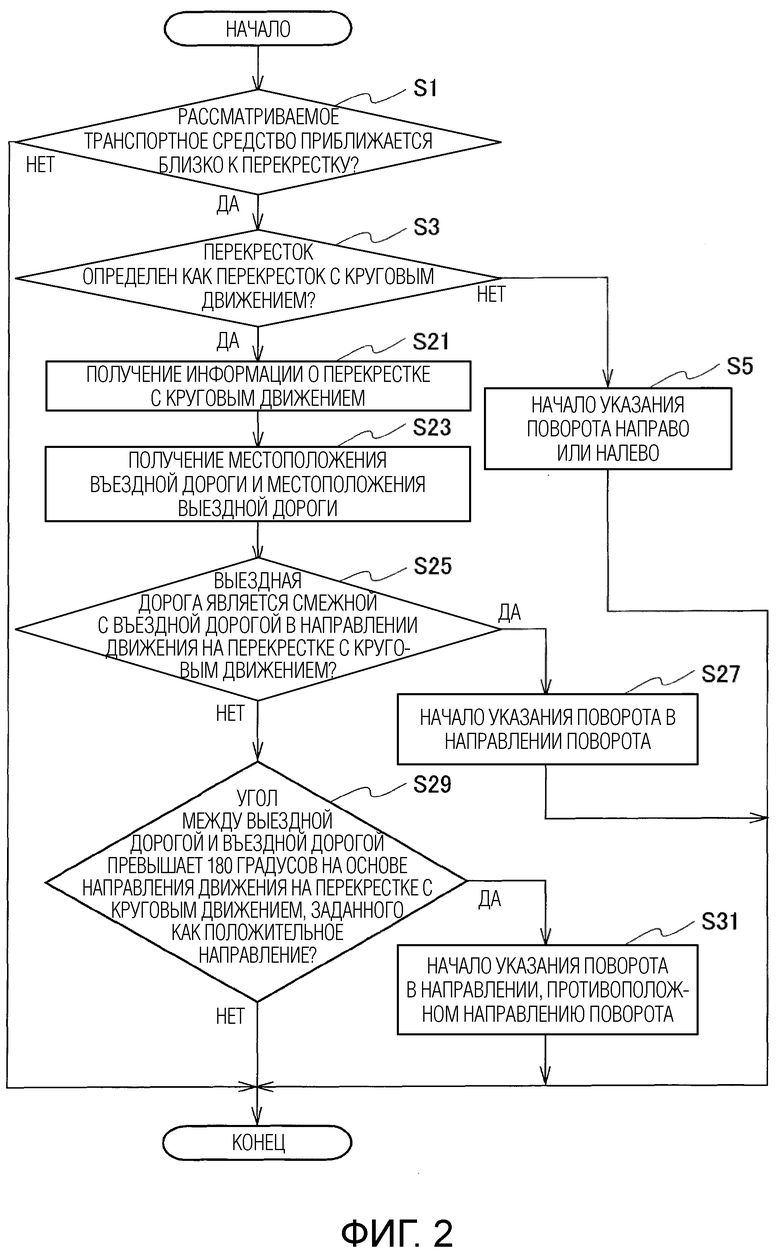
1. Способ управления указателем поворота, содержащий этапы, на которых:
определяют, приближается ли транспортное средство близко к перекрестку;
определяют, является ли перекресток перекрестком с круговым движением, когда определено, что транспортное средство находится близко к перекрестку;
получают местоположение въездной дороги, по которой транспортное средство въезжает на перекресток с круговым движением, и местоположение выездной дороги, по которой транспортное средство выезжает с перекрестка с круговым движением, когда определено, что перекресток является перекрестком с круговым движением; и
определяют, должен ли указатель поворота транспортного средства выполнять указание поворота, когда транспортное средство въезжает на перекресток с круговым движением, в соответствии с взаимным расположением местоположения въездной дороги и местоположения выездной дороги.
2. Способ управления указателем поворота по п. 1, дополнительно содержащий этапы, на которых:
определяют, является ли выездная дорога смежной с въездной дорогой в направлении движения на перекрестке с круговым движением; и
заставляют указатель поворота на въездной дороге начать указание поворота в направлении, в котором транспортное средство поворачивает для выезда с перекрестка с круговым движением, когда определено, что выездная дорога является смежной с въездной дорогой в направлении движения на перекрестке с круговым движением.
3. Способ управления указателем поворота по п. 1, дополнительно содержащий этапы, на которых:
определяют, является ли выездная дорога смежной с въездной дорогой в направлении движения на перекрестке с круговым движением;
когда въездная дорога включает в себя множество полос движения, и определено, что выездная дорога является смежной с въездной дорогой в направлении движения на перекрестке с круговым движением, определяют, находится ли транспортное средство в одной из полос движения в направлении, в котором транспортное средство поворачивает для выезда с перекрестка с круговым движением; и
заставляют указатель поворота выполнять указание поворота в направлении соответствующей полосы движения, когда определено, что транспортное средство не находится в соответствующей полосе движения.
4. Способ управления указателем поворота по любому из пп. 1-3, дополнительно содержащий этапы, на которых:
определяют, составляет ли угол между выездной дорогой и въездной дорогой больше 180°, когда направление движения на перекрестке с круговым движением задано как положительное направление; и
заставляют указатель поворота на въездной дороге начать указание поворота в направлении, противоположном направлению, в котором транспортное средство поворачивает для выезда с перекрестка с круговым движением, когда определено, что угол больше 180°.
5. Способ управления указателем поворота по любому из пп. 1-3, дополнительно содержащий этапы, на которых:
определяют, составляет ли угол между выездной дорогой и въездной дорогой больше 180°, когда направление движения на перекрестке с круговым движением задано как положительное направление;
когда въездная дорога включает в себя множество полос движения, и угол определен как больше 180°, определяют, находится ли транспортное средство в одной из полос движения в направлении, противоположном направлению, в котором транспортное средство поворачивает для выезда с перекрестка с круговым движением; и
заставляют указатель поворота выполнять указание поворота в направлении соответствующей полосы движения, когда определено, что транспортное средство не находится в соответствующей полосе движения.
6. Способ управления указателем поворота по любому из пп. 1-3, дополнительно содержащий этап, на котором:
заставляют указатель поворота приостановить указание поворота, когда транспортное средство въезжает на перекресток с круговым движением, когда угол между выездной дорогой и въездной дорогой составляет 180° или меньше, когда направление движения на перекрестке с круговым движением задано как положительное направление, и выездная дорога не является смежной с въездной дорогой в направлении движения на перекрестке с круговым движением.
7. Способ управления указателем поворота по любому из пп. 1-3, в котором направление указания поворота переключается в противоположном направлении в зависимости от того, является ли направление движения на перекрестке с круговым движением направлением по часовой стрелке или направлением против часовой стрелки.
8. Устройство управления указателем поворота для указателя поворота, установленного на транспортном средстве, причем упомянутое устройство содержит схему управления, содержащую:
первый блок определения, сконфигурированный для определения, является ли перекресток, к которому транспортное средство близко приближается, перекрестком с круговым движением;
блок вычисления, сконфигурированный для получения въездной дороги, по которой транспортное средство въезжает на перекресток с круговым движением, и выездной дороги, по которой транспортное средство выезжает с перекрестка с круговым движением, когда первый блок определения определяет, что перекресток, к которому транспортное средство близко приближается, является перекрестком с круговым движением; и
второй блок определения, сконфигурированный для определения, должен ли указатель поворота транспортного средства выполнять указание поворота, когда транспортное средство въезжает на перекресток с круговым движением, в соответствии с взаимным расположением местоположения въездной дороги и местоположения выездной дороги.
9. Устройство управления указателем поворота для указателя поворота, установленного на транспортном средстве, причем упомянутое устройство содержит:
первый блок определения, сконфигурированный для определения, является ли перекресток, к которому транспортное средство близко приближается, перекрестком с круговым движением; и
схему управления, сконфигурированную заставлять указатель поворота выполнять указание поворота в направлении, в котором транспортное средство движется для подъезда к месту, в котором соединяются дороги,
при этом схема управления включает в себя:
блок вычисления, сконфигурированный для получения въездной дороги, по которой транспортное средство въезжает на перекресток с круговым движением, и выездной дороги, по которой транспортное средство выезжает с перекрестка с круговым движением, когда первый блок определения определяет, что перекресток, к которому транспортное средство близко приближается, является перекрестком с круговым движением; и
второй блок определения, сконфигурированный для определения, должен ли указатель поворота транспортного средства выполнять указание поворота, когда транспортное средство въезжает на перекресток с круговым движением, в соответствии с взаимным расположением местоположения въездной дороги и местоположения выездной дороги,
при этом указателем поворота управляют, чтобы он мигал, когда схема управления включена, и выключался, когда схема управления выключена,
при этом схема управления настроена на отключение или сохранение выключенного состояния, чтобы заставить указатель поворота приостановить указание поворота.
10. Способ управления указателем поворота, содержащий этапы, на которых:
определяют, приближается ли транспортное средство близко к перекрестку с круговым движением;
получают местоположение въездной дороги, по которой транспортное средство въезжает на перекресток с круговым движением, и местоположение выездной дороги, по которой транспортное средство выезжает с перекрестка с круговым движением, когда определено, что транспортное средство находится близко к перекрестку с круговым движением; и
определяют, должен ли указатель поворота транспортного средства выполнять указание поворота, когда транспортное средство въезжает на перекресток с круговым движением, в соответствии с взаимным расположением местоположения въездной дороги и местоположения выездной дороги.
| Токарный резец | 1924 |
|
SU2016A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Устройство с регулируемым коэффициентом усиления | 1987 |
|
SU1580529A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |

