Положение центра масс беспилотного вертолета (центровка беспилотного вертолета) оказывает большое влияние на нормальное пилотирование и безопасность полета беспилотного вертолета. Наиболее важной считается продольная центровка вертолета. Центровка вертолета определяется по отношению к оси несущего винта и выражается расстоянием от нее в миллиметрах. При подсчете центровки вертолета учитывают, какой момент создается нагрузкой: на кабрирование или на пикирование. Если груз расположен впереди оси несущего винта, то перед величиной координат ставят знак плюс, при расположении сзади - знак минус [1].
Одновинтовые и соосные вертолеты имеют небольшой диапазон центровок. Положение центра масс вертолета значительно влияет на его управляемость и в меньшей степени на его устойчивость. Управляемость вертолета обеспечивается только в тех случаях, когда центровка не выходит за пределы допустимых значений. Выход центровки за предельно переднюю или предельно заднюю величину требует недопустимых отклонений тарелки автомата перекоса и вызывает недостаток запаса управления для обеспечения безопасных режимов полета. Кроме предельно допустимых эксплуатационных центровок, для каждого типа беспилотного вертолета имеется так называемый рекомендуемый диапазон центровок, при котором обеспечивается наиболее безопасное управление беспилотным вертолетом. На изменение положения координат центра масс вертолета оказывает влияние порядок размещения груза, который берется на борт беспилотного вертолета перед полетом или сбрасывается с беспилотного вертолета в полете, расходуемые в полете топливо и масло.
Также большое влияние на положение центра масс беспилотного вертолета оказывает установка на борт блоков сменной аппаратуры и полезной нагрузки. Блоки сменной аппаратуры - это заменяемые блоки бортового оборудования. Бортовое оборудование - программно-аппаратный комплекс, включающий подсистемы следующего функционального назначения: контроль технического состояния БВС, включая контроль силовой установки, источников тока, механических, электрических и гидравлических исполнительных устройств, а также контроль образования льда на внешних поверхностях БВС; навигационное определение, автономная навигация, комплексная обработка разнородной навигационной информации, навигация при отсутствии сигналов глобальных навигационных систем, астроориентация, ориентация по карте местности и карте высот; сенсорные подсистемы, поставляющие информацию об окружающей БВС среде; средства связи; исполнительные элементы и системы, а также соответствующие источники энергии и устройства преобразования энергии в работу, предназначенные для привода органов управления БВС и совершения иных функциональных действий, необходимых для полета БВС и его функционирования в соответствии с функциональным назначением.
Полезной нагрузкой считаются элементы и подсистемы БВС, предназначенные для обеспечения эксплуатации беспилотного вертолета в соответствии с функциональным назначением, расширения функциональных возможностей беспилотного вертолета по назначению, не входящие в перечень основных подсистем беспилотного вертолета и устанавливаемые (подвешиваемые) на беспилотный вертолет по мере необходимости.
В настоящее время на борт беспилотного вертолета возможно устанавливать на одни и те же места унифицированные по присоединительным размерам блоки сменной аппаратуры и полезной нагрузки, отличающиеся друг от друга массой и положением координат центра масс [2, 3]. Так как при уменьшении размеров беспилотных вертолетов законы подобия не соблюдаются, и малый агрегат оказывается, как правило, относительно тяжелее большого [4], то изменение состава блоков сменной аппаратуры и полезной нагрузки с различными координатами центра масс приводит к значительному изменению координат центра масс беспилотного вертолета в целом. Таким образом, при замене блоков сменной аппаратуры и полезной нагрузки, унифицированных по присоединительным размерам, но отличных друг от друга по массе и положению центра масс, необходимо каждый раз вычислять нов
Известен способ, описанный в RU 2400405 С1.
Способ определения массы летательного аппарата и положения его центра масс с целью увеличения информативности экипажа в кабине и повышения безопасности полета, при котором определяется масса летательного аппарата и его центр масс, отличающийся тем, что масса летательного аппарата и положение его центра масс перед взлетом определяются по сигналам датчиков давления, например пьезоэлектрических датчиков, располагающихся непосредственно на летательном аппарате, в частности в месте крепления стоек шасси к конструкции летательного аппарата, причем эти сигналы образовываются в виде электродвижущей силы (ЭДС), прямо пропорциональной массе летательного аппарата: чем больше масса, тем больше ЭДС, но масса летательного аппарата распределяется неравномерно по всем датчикам, то есть стойкам шасси в данном случае, что зависит от положения центра масс летательного аппарата, и эти сигналы с датчиков давления поступают в бортовой процессор, например микроконтроллер, где преобразуются в числовое значение массы летательного аппарата по суммарному значению ЭДС со всех датчиков и к этой массе известной массы стоек шасси, а по различию значений ЭДС с каждого датчика и известным размерам базы шасси и его колеи определяется численное значение положения центра масс летательного аппарата на его продольной и поперечной осях, после чего сформированные в процессоре сигналы в виде численных величин массы летательного аппарата и положения его центра масс на продольной и поперечной осях поступают в кабину экипажа на отображаемое устройство, например дисплей, где высвечиваются, и позволяют экипажу получать визуально или в любом другом виде информацию о массе летательного аппарата и положении его центра масс перед взлетом.
Устройство для определения массы летательного аппарата и положения его центра масс, отличающееся тем, что все элементы этого устройства располагаются непосредственно на летательном аппарате и включают в свой состав датчики давления, например пьезоэлектрические датчики, размещаемые, например, в местах крепления стоек шасси с конструкцией летательного аппарата, процессор, в частности микроконтроллер, и отображающее устройство в кабине экипажа, например дисплей, причем в датчиках давления при действии на них массы летательного аппарата образуются сигналы в виде электродвижущих сил (ЭДС), которые поступают в микроконтроллер, где преобразуются в численные величины массы летательного аппарата и положения его центра масс на продольной и боковой осях, а затем эти сигналы поступают в кабину экипажа на отображающее устройство, например дисплей, на котором экипаж, при необходимости, может получить информацию о массе летательного аппарата и положении его центра масс перед взлетом.
Недостатком этого способа является то, что определение координат центра масс возможно только на земле перед взлетом. Посадка со значительными перегрузками может повредить работоспособности датчиков, что в свою очередь приведет к погрешности определения координат центра масс летательного аппарата.
Также известен способ, описанный в RU 2570339 C1.
Формула изобретения 1. Способ определения координат центра масс летательного аппарата, основанный на измерении параметров полета аппарата и включающий в себя измерение кажущегося линейного ускорения, угловой скорости аппарата относительно его центра масс, использование значения ускорения силы тяжести, вычисленного в реальном масштабе времени, использование значений углов крена и тангажа, и на основании полученной совокупности данных, определение координат центра масс, отличающийся тем, что первоначально дополнительно измеряют величины угла атаки, угла скольжения, скорости летательного аппарата, углы тангажа и крена, а в дальнейшем производят измерение только угловой скорости, посредством трехосевого блока датчиков угловой скорости, и кажущихся ускорений вдоль связанных осей, посредством трехосевого блока акселерометров, причем координаты установки датчиков на борту являются известными, и на основе измеренных величин рекуррентным способом определяют величины угла атаки, угла скольжения, скорости летательного аппарата, углы тангажа и крена, кроме того, определяют динамические погрешности измерения перегрузок, обусловленные отклонением центра масс от точки установки датчиков перегрузок, используя разности первоначально определенных значений оцениваемых величин и значений этих величин с учетом динамических погрешностей измерения перегрузок, а также используя статистические характеристики погрешностей и шумов акселерометров и датчиков угловых скоростей, определяют функционал, а затем путем его минимизации при выполнении маневра типа "змейка" определяют координаты центра масс летательного аппарата.
2. Устройство определения координат центра масс летательного аппарата, включающее трехосевой блок датчиков угловых скоростей, трехосевой блок акселерометров, сумматор, отличающееся тем, что в него дополнительно введены дифференцирующее устройство, блок определения поправок к перегрузкам, два интегратора, второй и третий сумматоры, последовательно соединенные блок формирования функционала и блок обработки функционала, причем первый, второй и третий выходы блока датчиков угловой скорости подключены соответственно ко второму, третьему и четвертому входам первого интегратора, первый вход которого является входом для сигналов, соответствующих начальным условиям, к первому, второму и третьему входам дифференцирующего устройства и к первому, второму и третьему входам блока определения поправок к перегрузкам, к четвертому, пятому и шестому входам которого подключены соответствующие выходы дифференцирующего устройства, первый, второй и третий выходы блока определения поправок к перегрузкам подключены к первым входам соответственно первого, второго и третьего сумматоров, ко вторым входам которых подключены соответственно первый второй и третий выходы блока акселерометров, соединенные также с пятым, шестым и седьмым входами первого интегратора соответственно, первый выход которого подключен к первому входу блока формирования функционала, второй выход подключен к первому входу второго интегратора, ко второму, третьему и четвертому входам которого подключены выходы соответственно первого, второго и третьего сумматоров, а выход второго интегратора подключен ко второму входу блока формирования функционала, третий вход которого является входом для сигналов, соответствующих статистическим характеристикам погрешностей и шумов акселерометров и датчиков угловых скоростей, первый, второй и третий выходы блока обработки функционала подключены соответственно к седьмому, восьмому и девятому входам блока определения поправок к перегрузкам и являются выходами устройства.
Недостатком данного способа является то что, осуществляя данный способ нет возможности определить координаты центра масс летательного аппарата в то время, когда он находится на земле. В полете нельзя точно определить координаты центра масс, пока летательный аппарат не находится в режиме установившегося полета в котором он выполняет маневр «змейка» US 1015161 (B2).
1. Сущность изобретения: 1. Система для определения распределения грузовых мест в грузовом отсеке транспортного средства, содержащая: множество ярлыков, причем каждая из множества ярлыков установлена на разных частях деталей; груза в грузовом отсеке и информации о фактическом весе различных грузовых мест, на которых установлена конкретная бирка; множество датчиков, установленных в разнесенном массиве по длине грузового отсека, каждый из которых способен считывать с меток информацию, указывающую вес грузовых мест, при этом каждый из множества датчиков расположен вдоль длина грузового отсека, находится на известном расстоянии от плоскости отсчета, и датчики расположены и регулируются таким образом, что каждый из датчиков считывает информацию, указывающую вес грузовых мест, меньше чем всех грузовых мест; и компьютер, подключенный для приема от множества датчиков информации, указывающей вес, и информации, указывающей на расположение частей груза в грузовом отсеке, компьютер, запрограммированный на вычисление на их основе центра тяжести множества частей груза; аппроксимировать продольное расположение каждой единицы груза на основе идентификации каждой единицы груза с помощью определенных датчиков и известного местоположения конкретных датчиков в грузовом отсеке; и определить местоположение конкретного места груза, которое должно быть между передним и задним из множества датчиков, обнаруживающих конкретное место груза, в ответ на четное количество из множества датчиков, обнаруживающих конкретное место груза, груз.
2. Система по п. 1, в которой транспортное средство выбирается из летательного аппарата, морского судна и наземного транспортного средства.
3. Система по п. 1, в которой компьютер запрограммирован на вычисление центра тяжести в режиме реального времени множество раз во время одной или обеих операций: загрузки груза транспортного средства и разгрузки груза транспортного средства.
4. Система по п. 1, в которой груз выбирается из багажа и устройств для пакетной загрузки.
5. Система по п. 1, в которой метки являются метками радиочастотной идентификации (RFID), а датчики представляют собой запросчики RFID.
6. Система по п. 1, в которой каждая из множества бирок несет информацию, указывающую диапазон веса различных единиц груза, на которых она установлена.
7. Система по п. 1, в которой компьютер запрограммирован на включение сигнала тревоги, когда центр тяжести смещается за пределы заранее определенного местоположения на транспортном средстве.
8. Система по п. 1, в которой компьютер запрограммирован на определение местоположения конкретного места груза, чтобы он находился в средней точке положения датчика из множества датчиков, обнаруживающих конкретное место багажа при нечетном числе из множества датчиков обнаруживают конкретное место груза.
9. Система по п. 1, в которой компьютер запрограммирован на вычисление объединенного центра тяжести пассажиров транспортного средства и груза транспортного средства.
10. Система по п. 9, в которой компьютер запрограммирован на вычисление объединенного центра тяжести пассажиров транспортного средства и груза транспортного средства множество раз во время одной или обеих загрузок пассажира и груза транспортного средства и пассажира, и разгрузка груза из автомобиля.
11. Система по п. 1, в которой компьютер запрограммирован на вычисление центра тяжести транспортного средства с использованием центра тяжести сухой эксплуатационной массы транспортного средства, центра тяжести масс всех пассажиров и ручной клади, багаж на транспортном средстве, общий центр тяжести всего груза в грузовом отсеке и центр тяжести общего веса топлива.
12. Система по п. 11, в которой компьютер запрограммирован на вычисление центра тяжести транспортного средства в реальном времени множество раз во время одной или обеих операций: загрузки пассажира и груза и разгрузки пассажира и груза.
13. Способ создания системы для обнаружения распределения грузовых единиц в грузовом отсеке транспортного средства, включающий: выбор множества датчиков, которые считывают информацию, содержащуюся на бирках, указывающую вес грузовых мест, на которых установлены бирки; установку множества датчиков в разнесенной решетке по длине грузового отсека, так чтобы каждый из датчиков находился на известном расстоянии от базовой плоскости транспортного средства; подключение компьютера для получения от множества датчиков информации, указывающей вес, и информации, указывающей расположение частей груза в грузовом отсеке, при этом каждый из множества датчиков расположен по длине грузового отсека на известном расстояние от плоскости отсчета, и датчики расположены и регулируются таким образом, что каждый из датчиков считывает информацию, указывающую вес грузовых мест, меньше, чем все единицы груза; и программирование компьютера для вычисления на основе информации, указывающей веса, и информации, указывающей расположение частей груза в грузовом отсеке: центра тяжести множества частей груза; аппроксимировать продольное расположение каждой единицы груза на основе идентификации каждой единицы груза с помощью определенных датчиков и известного местоположения конкретных датчиков в грузовом отсеке; и определить местоположение конкретного места груза, которое должно быть между передним и задним из множества датчиков, обнаруживающих конкретное место груза, в ответ на четное количество из множества датчиков, обнаруживающих конкретное место груза.
14. Способ по п. 13, дополнительно содержащий: выбор транспортного средства из летательного аппарата, морского судна и наземного транспортного средства.
15. Способ по п. 13, в котором компьютер запрограммирован на: вычислять центр тяжести в режиме реального времени множество раз во время одной или обеих операций: загрузки груза транспортного средства и разгрузки груза транспортного средства.
16. Способ по п. 13, в котором каждая из множества бирок несет информацию, указывающую диапазон веса различных единиц груза, на которых она установлена.
17. Способ по п. 13, в котором компьютер запрограммирован так, чтобы: активировать сигнал тревоги, когда центр тяжести смещается за пределы заранее определенного местоположения на транспортном средстве.
18. Способ по п. 13, в котором компьютер запрограммирован на: определение местоположения конкретного места груза, которое должно находиться в средней точке расположения датчиков из множества датчиков, обнаруживающих конкретное место багажа, когда нечетное количество из множества датчиков обнаруживает конкретное место груза.
19. Способ по п. 13, в котором компьютер запрограммирован на вычисление общего центра тяжести пассажиров транспортного средства и груза транспортного средства.
20. Способ по п. 19, в котором компьютер запрограммирован так, чтобы: вычислять объединенный центр тяжести пассажиров транспортного средства и груза транспортного средства множество раз во время одной или обеих загрузок пассажиров и груза транспортного средства и разгрузка пассажиров и груза из транспортного средства.
Недостатком данного способа является то, что:
- бирка, которая связана с отдельным грузом не содержит информации об отклонении координат центра масс отдельного груза от центра груза (п. 16);
- способ по п. 13, в котором компьютер запрограммирован на: определение местоположения конкретного места груза, которое должно находиться в средней точке расположения датчиков из множества датчиков, обнаруживающих конкретное место багажа, когда нечетное количество из множества датчиков обнаруживает конкретное место груза, а при вычислении координат общего центра масс для всего груза не известно на сколько отклоняется координаты центра масс каждого груза, которые должны находиться в средней точке расположения датчиков из множества датчиков. Таким образом, возникает погрешность определения координат общего центра масс для всего груза и летательного аппарата в целом.
Технический результат, на достижение которого направлено изобретение, заключается в повышении точности вычисления координат центра масс беспилотного вертолета на его борту на земле и в полете при замене блоков сменной аппаратуры и полезной нагрузки.
Указанный технический результат достигается тем, что предварительно на стенде у блоков сменной аппаратуры и полезной нагрузки определяют расположение осей координат Хб, Yб, Zб с началом координат в центре места установки, определяют координаты центра масс блоков сменной аппаратуры и полезной нагрузки, вычисляют значение отклонения координат центра масс блоков сменной аппаратуры и полезной нагрузки от их центра места установки в единицах длинны. Заносят данные об отклонении координат центра масс блоков сменной аппаратуры и полезной нагрузки от их центра места установки в память блоков сменной аппаратуры и полезной нагрузки соответственно. На борту беспилотного вертолета устанавливают блоки сменной аппаратуры и полезной нагрузки, на унифицированные посадочные места, при этом совмещают центры мест установки блоков сменной аппаратуры и полезной нагрузки, с точкой координаты которой известны на борту беспилотного вертолета. Совмещают оси координат Хб, Yб, Zб блоков сменной аппаратуры и полезной нагрузки с осями X, Y, Z беспилотного вертолета, передают из памяти блока сменной аппаратуры и полезной нагрузки данные об отклонении их координат центра масс от центра места установки блока сменной аппаратуры и полезной нагрузки на борт беспилотного вертолета. На борту беспилотного вертолета вычисляют координаты центра масс беспилотного вертолета.
Способ определения координат центра масс беспилотного вертолета заключается в следующем. Для вычисления центра масс беспилотного вертолета учитывают дополнительное изменение координат центра масс беспилотного вертолета, которое возникает вследствие установки на одно и то же место унифицированных по присоединительным размерам блоков сменной аппаратуры и полезной нагрузки, которые отличаются друг от друга положением координат центра масс, для чего выполняют следующие измерения и вычисления:
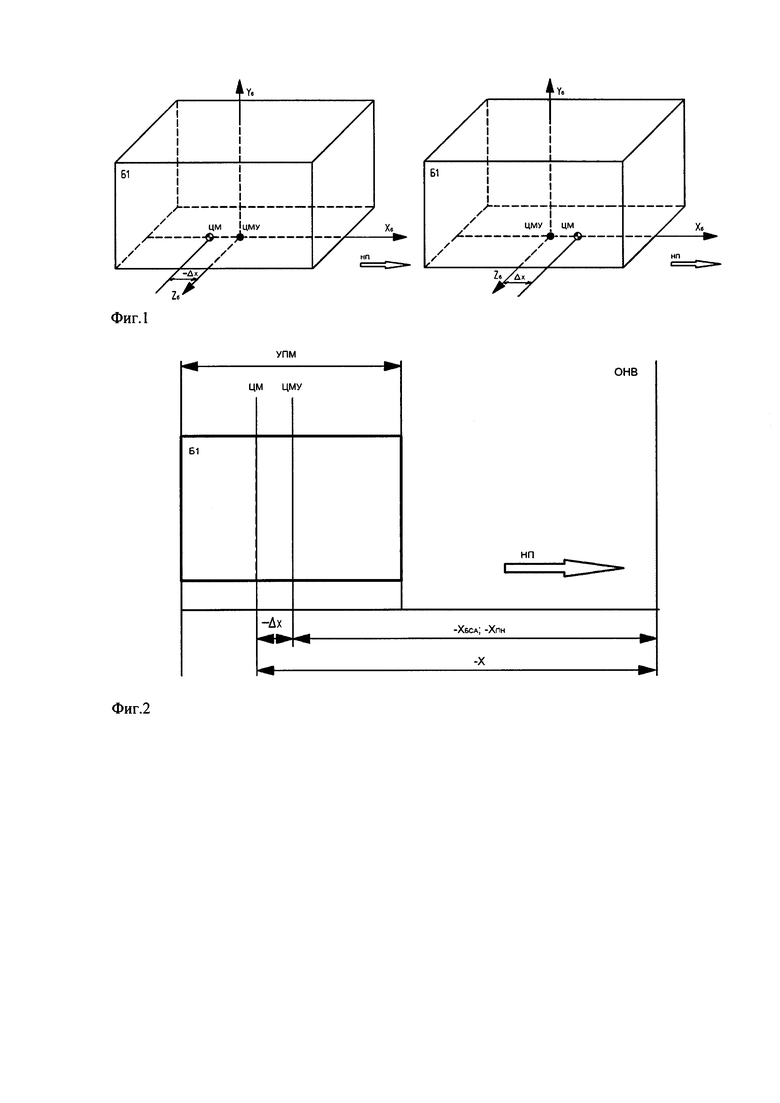
- предварительно на стенде определяют систему координат с началом в центре места установки (ЦМУ) блока сменной аппаратуры и полезной нагрузки (Б1), центром места установки может быть, точка пересечения диагоналей основания блока сменной аппаратуры или полезной нагрузки (Фиг. 1);
- определяют положение центра масс (ЦМ) у блока сменной аппаратуры и полезной нагрузки;
- вычисляют значение отклонения координат центра масс блоков сменной аппаратуры и полезной нагрузки от их центра места установки в единицах длинны (ДХ). Если координаты центра масс лежат до начала координат блока сменной аппаратуры и полезной нагрузки, то значение берется со знаком плюс, если после, то со знаком минус;
- значение отклонения координат центра масс от центра места установки заносят в память блоков сменной аппаратуры и полезной нагрузки;
- на борту беспилотного вертолета устанавливают блоки сменной аппаратуры и полезной нагрузки, на унифицированные посадочные места (УПМ) при этом:
- совмещают центр места установки (ЦМУ) с точкой (ХБСА или ХПН) расстояние, от которой до оси вращения несущего винта (ОНВ) беспилотного вертолета известно на борту бесплотного вертолета;
- оси координат блока сменной аппаратуры или полезной нагрузки совмещают с осями координат беспилотного вертолета таким образом, что Ось Хб блока сменной аппаратуры и полезной нагрузки направлена по направлению оси X беспилотного вертолета (Фиг 2);
- данные об отклонении координат центра масс блоков сменной аппаратуры и полезной нагрузки передают из их памяти на борт беспилотного вертолета;
- на борту беспилотного вертолета производят вычисление координат центра масс беспилотного вертолета следующим образом:
Координаты центра масс беспилотного вертолета вычисляют на земле и в полете его бортовым вычислителем. Вычисления производят на основе данных, о координатах центра масс пустого беспилотного вертолета XП, которые заранее занесены в бортовой вычислитель. Данных о координатах центра масс топлива ХТ, которые вычисляют на борту беспилотного вертолета и передают в бортовой вычислитель. Также на основании заранее известного расстояния от оси вращения несущего винта ОНВ до точки XБСА и XПН, которые совпадают с центрами мест установки блоков сменной аппаратуры и полезной нагрузки. Взлетная масса беспилотного вертолета mБПВ вычисляется как сумма масс: пустого беспилотного вертолета mП (известная на борту), mT топлива (вычисленная на борту), блоков сменной аппаратуры mБСА и полезной нагрузки mПН. Данные о массе mБСА и mПН передаются в бортовой вычислитель из памяти блоков сменной аппаратуры и полезной нагрузки;

- из памяти блоков сменной аппаратуры и полезной нагрузки на борт беспилотного вертолета передают данные о величине отклонения координат центра масс от центра места установки блока сменной аппаратуры ΔХБСА и полезной нагрузки ΔХПН в единицах длины, за счет этих данных уточняют положение новых координат центра масс блоков сменной аппаратуры и полезной нагрузки относительно оси несущего винта (X). Для этого необходимо суммировать значения ΔХБСА и ХБСА, а ΔХПН с ХПН. Если координаты центра масс блока находятся позади центра места установки, то значение отклонения центра масс блока берется со знаком минус, если координата центра масс блока находятся перед центром места установки, то значение отклонение центра масс блока берется со знаком плюс (Фиг. 1);
- если блок сменной аппаратуры и полезная нагрузка устанавливается перед осью, вращения несущего винта вычисления проводят по формуле:

- если блок сменной аппаратуры и полезная нагрузка устанавливается позади оси, вращения несущего винта вычисления проводят по формуле:
 ,
,
где:
ХБПВ - координаты центра масс беспилотного вертолета;
XП - координаты центра масс пустого беспилотного вертолета;
mП - масса пустого беспилотного вертолета;
ХБСА - известные координаты точки для установки блоков сменной аппаратуры;
ΔХБСА - величина отклонения центра масс блока сменной аппаратуры;
mБСА - масса блока сменной аппаратуры;
ХПН - известные координаты точки для установки полезной нагрузки;
ΔХПН - величина отклонения центра масс полезной нагрузки;
mПН - масса полезной нагрузки;
ХТ - координаты центра масс топлива;
mТ - масса топлива;
mБПВ - масса беспилотного вертолета.
Точность расчета координат центра масс беспилотного вертолета повышается за счет того, что учитывают отклонения координат центра масс блоков сменной аппаратуры и полезной нагрузки от центра места установки блоков сменной аппаратуры и полезной нагрузки, которые передают из их памяти в бортовой вычислитель беспилотного вертолета на земле и в полете.
СПИСОК ЛИТЕРАТУРЫ
1) В.Г. Александров Центровка вертолета [Текст] // Справочник авиационного инженера. - Транспорт. 1973 - С. 75-76.
2) Военное обозрение: Беспилотный вертолет Aw Hero. [Электронный ресурс]. - Режим доступа: https://topwar.ru/164187-bespilotnyj-vertolet-aw-hero-vintokrylyj-boec-ocean-2020.html (дата обращений: 15.08.2021).
3) Дрон мания: Anduril Ghost 4. [Электронный ресурс]. - Режим доступа https://dronomania.ru/professionalnye/anduril-ghost-4.html (дата обращений: 15.08.2021).
4) В.С. Кривцов, Рекомендац. по опред. массовых характерист. агрегатов сверхлегких вертолетов: // Проектирование вертолетов. - Библиотека студента. 2003 - С. 150.
| название | год | авторы | номер документа |
|---|---|---|---|
| Пилотажно-навигационная система транспортного летательного аппарата | 2024 |
|
RU2822088C1 |
| Многофункциональное судно обеспечения морских буровых платформ и комплекс судовой системы грузообработки для применения на многофункциональном судне | 2020 |
|
RU2747109C1 |
| СПОСОБ И КОМПЛЕКС СРЕДСТВ ОБНАРУЖЕНИЯ ЧРЕЗВЫЧАЙНОЙ СИТУАЦИИ И ЛИКВИДАЦИИ ЕЕ ПОСЛЕДСТВИЙ | 2004 |
|
RU2350368C2 |
| СПОСОБ СКОРОСТНОЙ ВОЗДУШНОЙ РАЗВЕДКИ | 2009 |
|
RU2395782C1 |
| Способ точной посадки беспилотного летательного аппарата и устройство для реализации способа | 2021 |
|
RU2773978C1 |
| АЭРОМОБИЛЬНЫЙ КОМПЛЕКС С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ВЕРТОЛЕТНОГО ТИПА | 2022 |
|
RU2792314C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2019 |
|
RU2707091C1 |
| БЕЗАЭРОДРОМНЫЙ АВИАЦИОННЫЙ КОМПЛЕКС | 2015 |
|
RU2591115C1 |
| Беспилотный летательный аппарат с генерацией электроэнергии | 2021 |
|
RU2769036C1 |
| Энергонезависимый многоцелевой беспилотный летательный аппарат | 2020 |
|
RU2741825C1 |
Изобретение относится к области авиационной техники и может быть использовано для определения координат центра масс беспилотного вертолета на земле и в полете. Способ включает предварительное определение осей координат Хб, Yб, Zб с началом координат в центре места установки у блоков сменной аппаратуры и полезной нагрузки. Также определяют координаты центра масс блоков сменной аппаратуры и полезной нагрузки, после чего вычисляют значение отклонения координат центра масс от координат центра места установки блоков сменной аппаратуры и полезной нагрузки. Данные заносят в память каждого блока сменной аппаратуры и полезной нагрузки соответственно. На борту беспилотного вертолета устанавливают блоки сменной аппаратуры и полезной нагрузки, при этом совмещают их центр места установки с точкой координаты, которая известна на борту беспилотного вертолета. Далее передают из памяти блоков сменной аппаратуры и полезной нагрузки данные об отклонении координат их центра масс от координат их центра места установки на борт беспилотного вертолета и вычисляют координаты центра масс. Обеспечивается повышение точности определения координат центра масс беспилотного вертолета на земле и в полете. 2 ил.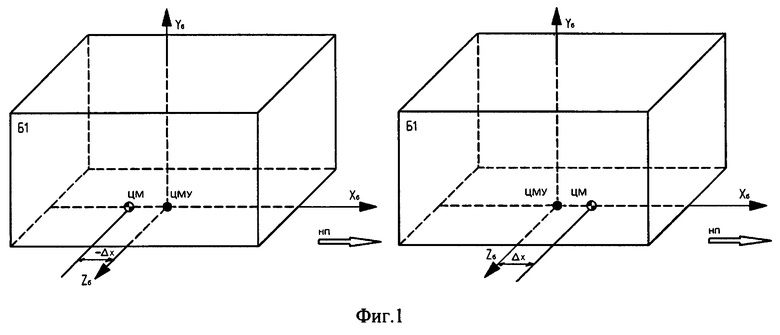
Способ определения координат центра масс беспилотного вертолета на земле и в полете, который осуществляется на борту беспилотного вертолета на основе данных о массе и координатах центра масс пустого беспилотного вертолета, данных о массе и координатах центра масс топлива, которые известны на борту беспилотного вертолета, передаваемых данных о массе от блока сменной аппаратуры и полезной нагрузки на борт беспилотного вертолета, отличающийся тем, что предварительно на стенде у блока сменной аппаратуры и полезной нагрузки определяют расположение осей координат Хб, Yб, Zб с началом координат в центре места установки, определяют координаты центра масс и полезной нагрузки, вычисляют значение отклонения координат центра масс и полезной нагрузки от их центра места установки в единицах длинны, заносят данные об отклонении координаты центра масс блоков сменной аппаратуры и полезной нагрузки от их центра места установки в память блока сменной аппаратуры и полезной нагрузки, на борту беспилотного вертолета устанавливают блоки сменной аппаратуры и полезной нагрузки при этом совмещают центр места установки блоков сменной аппаратуры и полезной нагрузки с точкой координаты которой известны на борту БПВ, совмещают оси координат Хб, Yб, Zб блоков сменной аппаратуры и полезной нагрузки с осями координат X, Y, Z беспилотного вертолета, передают из памяти блоков сменной аппаратуры и полезной нагрузки данные об отклонении координат центра масс от центра места установки блоков сменной аппаратуры и полезной нагрузки на борт беспилотного вертолета, на борту беспилотного вертолета вычисляют координат центра масс беспилотного вертолета по формуле:
если блоки сменной аппаратуры и полезной нагрузки установлены перед осью вращения несущего винта

и по формуле:
если блоки сменной аппаратуры и полезной нагрузки установлены позади оси вращения несущего винта
 .
.
| US 20200070960 A1, 05.03.2020 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕНТРА МАСС САМОЛЕТА В ПОЛЕТЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2570339C1 |
| FR 2004400 A5, 21.11.1969 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ МАССЫ ЛЕТАТЕЛЬНОГО АППАРАТА, ПОЛОЖЕНИЯ ЕГО ЦЕНТРА МАСС И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2400405C1 |
| US 9550561 B1, 24.01.2017 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ЦЕНТРА МАСС ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2564375C1 |

