ПЕРЕКРЕСТНАЯ ССЫЛКА НА СВЯЗАННЫЕ ЗАЯВКИ
В настоящей заявке испрашивается приоритет по дате подачи предварительной заявки на патент США № 62/333322, поданной авторами настоящего изобретения 23 сентября 2017 года.
Вышеупомянутая предварительная патентная заявка полностью включена в настоящее описание посредством ссылки.
ЗАЯВЛЕНИЕ ОТНОСИТЕЛЬНО ФЕДЕРАЛЬНО СПОНСИРОВАННОГО ИССЛЕДОВАНИЯ ИЛИ РАЗРАБОТКИ
Нет.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ Область техники, к которой относится изобретение
Настоящее изобретение относится к роботизированным хирургическим системам и вспомогательным устройствам для выполняя хирургических операций.
Краткое описание предшествующего уровня техники
За последние двадцать лет лапароскопическая хирургия превратилась в менее инвазивную альтернативу открытой хирургии. Миллионы лапароскопических хирургических процедур проводятся по всему миру каждый год. Лапароскопическое или торакоскопическое оперативное вмешательство выполняется путем выполнения нескольких маленьких надрезов размером один дюйм в брюшной стенке или грудной стенке соответственно. С целью обеспечения визуализации и создания рабочего пространства в брюшной полости путем инфузии углекислого газа создается пневмоперитонеум. Для выполнения хирургических задач через проколы вводятся гибкие или жесткие инструменты. Несмотря на широкое признание, существуют ограничения, связанные с использованием жесткого лапароскопа, когда хирургу приходится держать инструменты в фиксированном положении под неудобным углом в течение достаточно продолжительных периодов времени. Еще одна проблема, связанная с жестким лапароскопом, заключается в неадекватных движениях, которые хирург может выполнять, чтобы достичь потенциальных дефектов или опухолей брюшной стенки, а также неспособности выполнить внутреннее сочленение.
Во всем мире было принято роботизированное хирургическое вмешательство. Несмотря на достижения в области роботизированной хирургии, существуют ограничения для таких систем, которые раскрыты в патенте США №6,312,435 и патенте США №6,783,524. Например, в этих роботизированных системах требуется, чтобы хирург сидел вне стерильного поля и работал за большой консолью. В другой роботизированной системе, раскрытой в патенте США №9,360,934, требуется много места для размещения консоли в середине операционного поля. Все эти системы зависят от нескольких зубчатых и кабельных систем, расположенных между консолями и гибкими роботизированными инструментами.
В дополнение к роботизированным системам, рассмотренным выше, было предложено несколько механизированных хирургических инструментов, например, в патенте США №9,386,983 и патенте США №9,398,911. В каждой из этих систем раскрыта хирургическая сшивающая система с электродвигателем, которая обеспечивает ограниченное число моторизированных степеней свободы.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
В соответствии с предпочтительным вариантом осуществления настоящее изобретение представляет собой роботизированную хирургическую систему, которая обеспечивает пять степеней свободы с помощью одного ручного блока, сборки электродвигателей (или системы привода) и сборки манипулятора. Сборка электродвигателей снабжена одним гнездом для сопряжения с блоком управления, и гнездом, которое позволяет вставлять проксимальный конец сборки манипулятора в сборку электродвигателей. Сборка манипулятора может оснащаться одним или несколькими хирургическими инструментами на дистальном конце или около него.
В соответствии с другим предпочтительным вариантом осуществления настоящее изобретение представляет собой роботизированную хирургическую систему. В состав системы входит ручной блок и механический манипулятор. Ручной блок снабжен жестким кожухом, включающим в свой состав корпусную часть и рукоять, корпусная часть состоит из носовой части, сборки электродвигателей внутри жесткого кожуха. В состав сборки электродвигателей входит рама, несколько электродвигателей, закрепленных на раме, причем у каждого электродвигателя есть свой приводной вал. Кроме того, в состав сборки электродвигателей входит приводной ролик, соединенный с приводным валом каждого электродвигателя, фрикционная передача, снабженная роликом, соединенным с приводной роликом посредством приводной ленты, кольцо фрикционной передачи, приводимое в действие фрикционной передачей, множество приводных стержней, опирающихся на раму, вторичный ролик, связанный с каждым из множества приводных стержней, приводная лента, соединяющая каждый вторичный ролик с приводным роликом, множество приводных колец, причем каждое приводное кольцо приводится одним из множества приводных стержней, и управляющая электроника электрически подключенная к приводным электродвигателям. Кроме того, в состав ручного блока также входит механизм управления, соединенный с управляющей электроникой и проходящий через отверстие в жестком кожухе, механизм переключения режимов, соединенный с управляющей электроникой и проходящий через отверстие в жестком кожухе, и разъем для подключения источника питания для подачи питания на управляющую электронику и электродвигатели. Механический манипулятор соединен с ручным блоком и имеет множество степеней свободы, причем каждая из множества степеней свободы управляется одним из множества электродвигателей. Кроме того, в состав ручного блока также входит механический триггер для управления степенью свободы механического манипулятора. Механический манипулятор может иметь, например, пять степеней свободы. В состав сборки электродвигателей может входить, например, четыре приводных электродвигателя, и каждый приводной электродвигатель обеспечивает разную степень свободы механического манипулятора. В состав ручного блока может также входить экран дисплея, соединенный с управляющей электроникой, для отображения оперативной информации роботизированной хирургической системы.
В состав системы может также входить одноразовая наружная оболочка, охватывающая кожух. Одноразовая наружная оболочка выполняется из гибкого прозрачного материала.
В состав механического манипулятора может входить множество исполнительных трубок, причем каждая исполнительная трубка контролирует одну из степеней свободы механического манипулятора, и при этом каждое приводное кольцо приводит одну из исполнительных трубок для перемещения механического манипулятора со степенью свободы, контролируемой исполнительной трубкой.
Другие аспекты, признаки и преимущества настоящего изобретения очевидны из следующего подробного описания просто путем иллюстрации предпочтительных вариантов его осуществления и применения. Настоящее изобретение также допускает другие различные варианты осуществления, и его некоторые детали могут быть изменены в различных очевидных соотношениях без отклонения от сущности и объема настоящего изобретения. Соответственно, чертежи и описания должны рассматриваться как иллюстративные по своему характеру, а не как ограничивающие. Дополнительные цели и преимущества изобретения будут частично изложены в последующем описании и частично будут очевидны из описания или могут быть понятны при практическом использовании настоящего изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Для более полного понимания настоящего изобретения и его преимуществ ниже представлено описание прилагаемых чертежей.
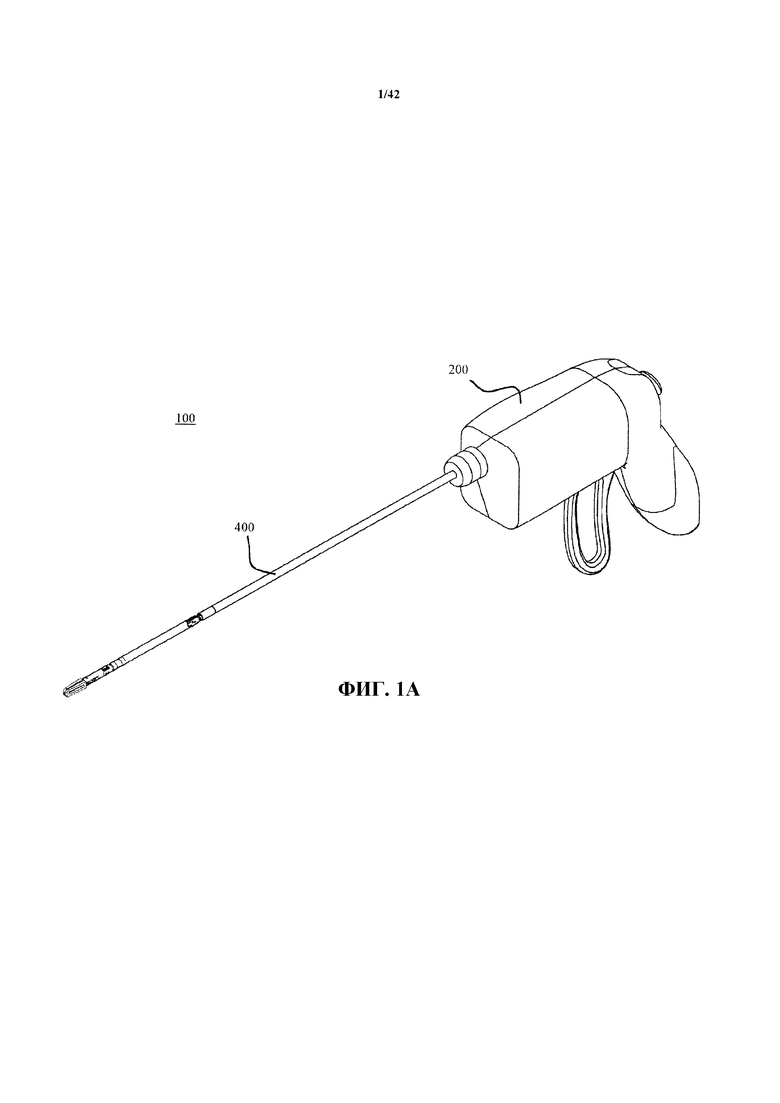
На фиг. 1А представлен перспективный вид роботизированной хирургической системы в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
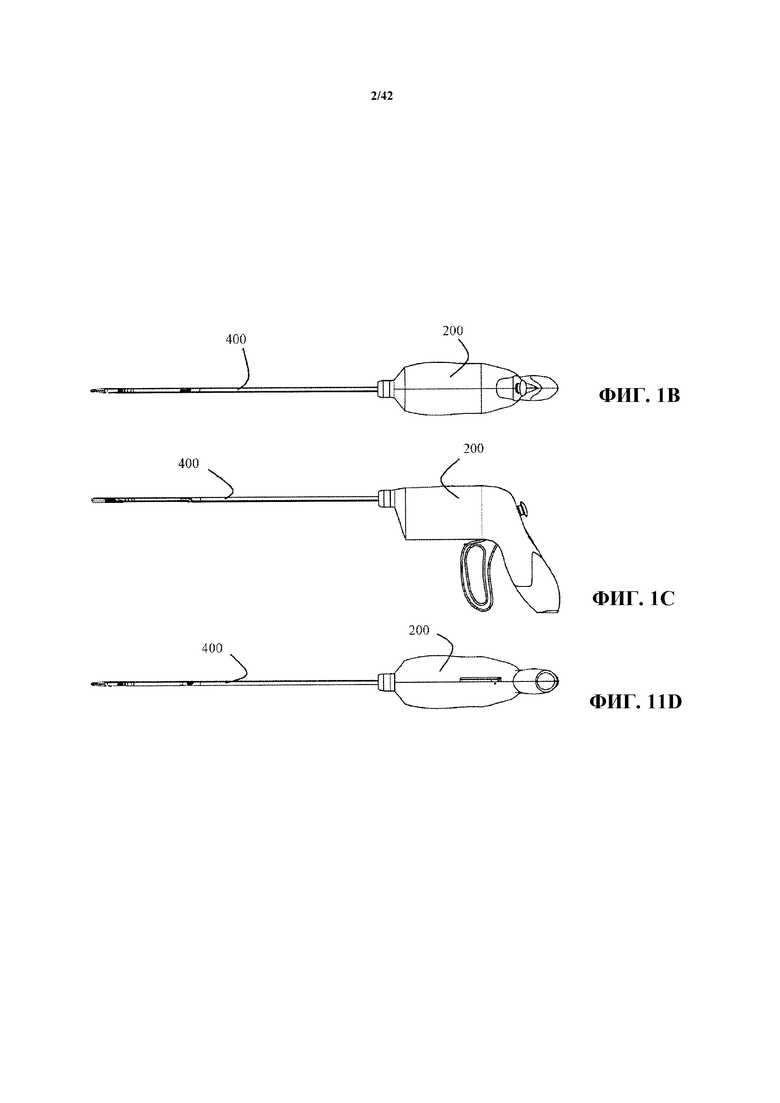
На фиг. 1В представлен вид сверху роботизированной хирургической системы в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
На фиг. 1С представлен первый вид сбоку роботизированной хирургической системы в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
На фиг. 1D представлен вид снизу роботизированной хирургической системы в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
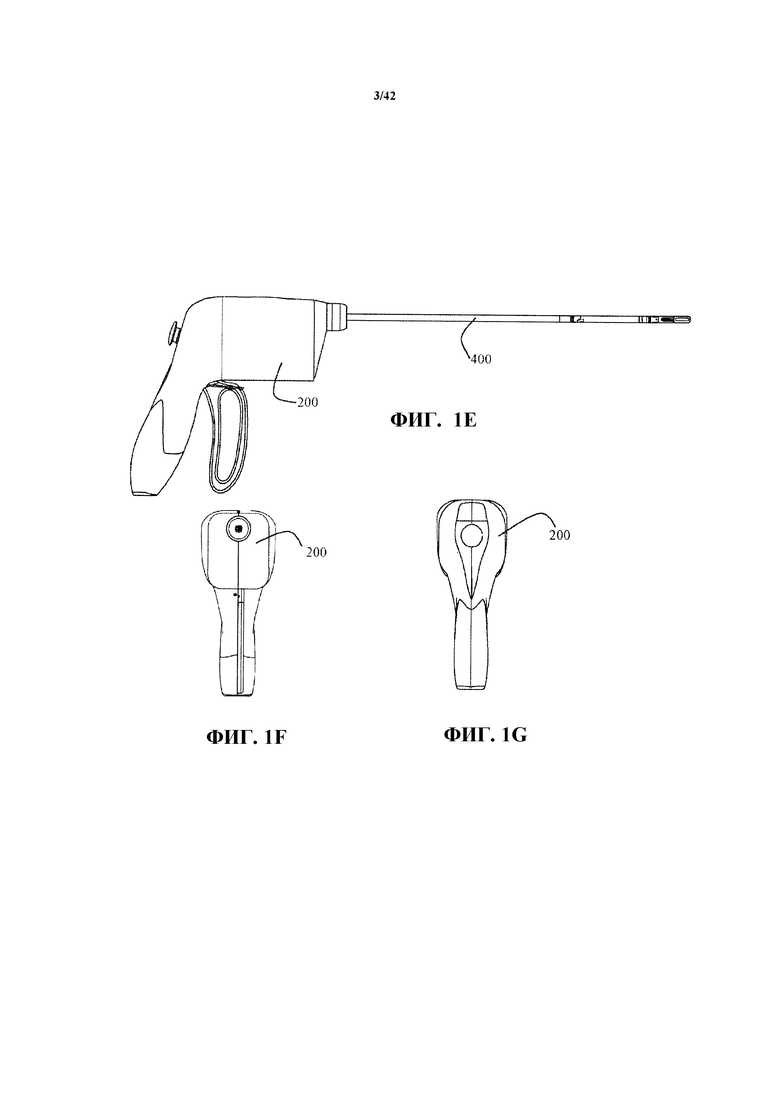
На фиг. 1Е представлен второй вид сбоку роботизированной хирургической системы в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
На фиг. 1F представлен вид спереди роботизированной хирургической системы в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
На фиг. 1G представлен вид сзади роботизированной хирургической системы в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
На фиг. 1Н представлен перспективный вид роботизированной хирургической системы по фиг.1А, где представлено альтернативное расположение сборки манипулятора в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
На фиг. 1I представлен перспективный вид роботизированной хирургической системы по фиг. 1А, где представлены диапазоны перемещения сборки манипулятора в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
На фиг. 2А представлен перспективный вид кожуха роботизированной хирургической системы в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
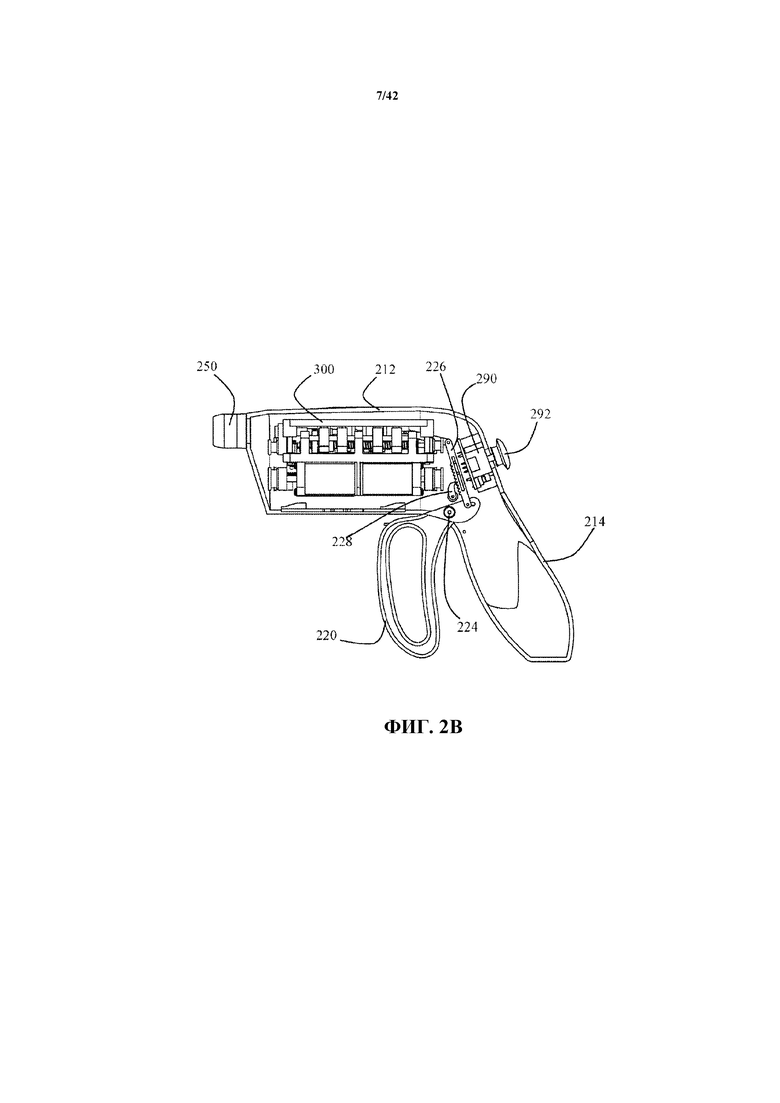
На фиг. 2В представлен первый вид сбоку сборок, расположенных внутри кожуха, в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
На фиг. 2С представлен второй вид сбоку сборок, расположенных внутри кожуха, в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
На фиг. 2D представлен вид спереди сборок, расположенных внутри кожуха, в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
На фиг. 2Е представлен вид сзади сборок, расположенных внутри кожуха, в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
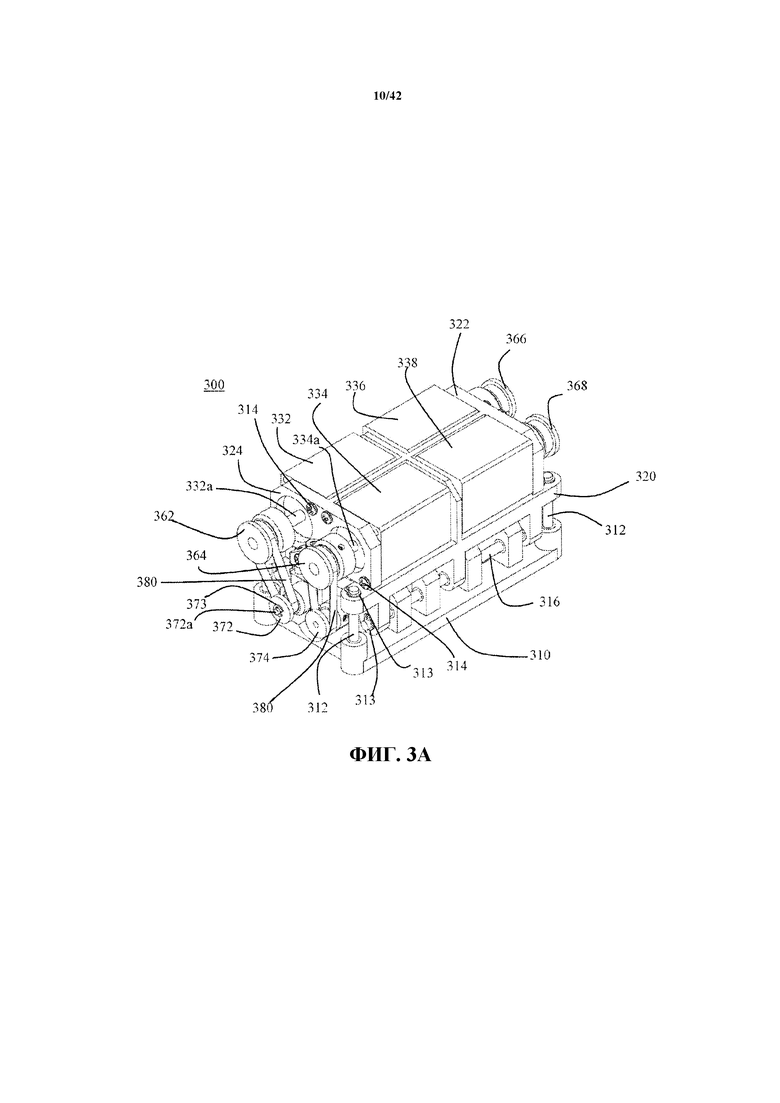
На фиг. 3А представлен перспективный вид снизу сборки электродвигателей роботизированной хирургической системы в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
На фиг. 3В представлен первый вид сбоку сборки электродвигателей роботизированной хирургической системы в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
На фиг. 3С представлен второй вид сбоку сборки электродвигателей роботизированной хирургической системы в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
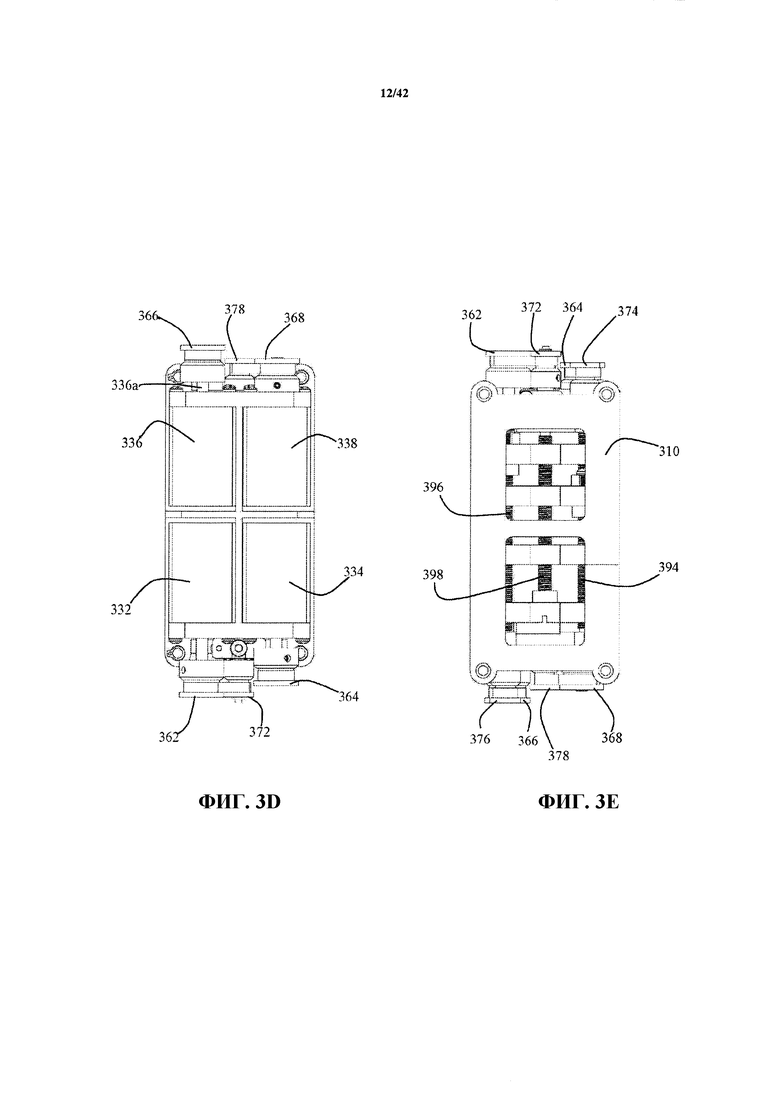
На фиг. 3D представлен вид снизу сборки электродвигателей роботизированной хирургической системы в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
На фиг. 3Е представлен вид сверху сборки электродвигателей роботизированной хирургической системы в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
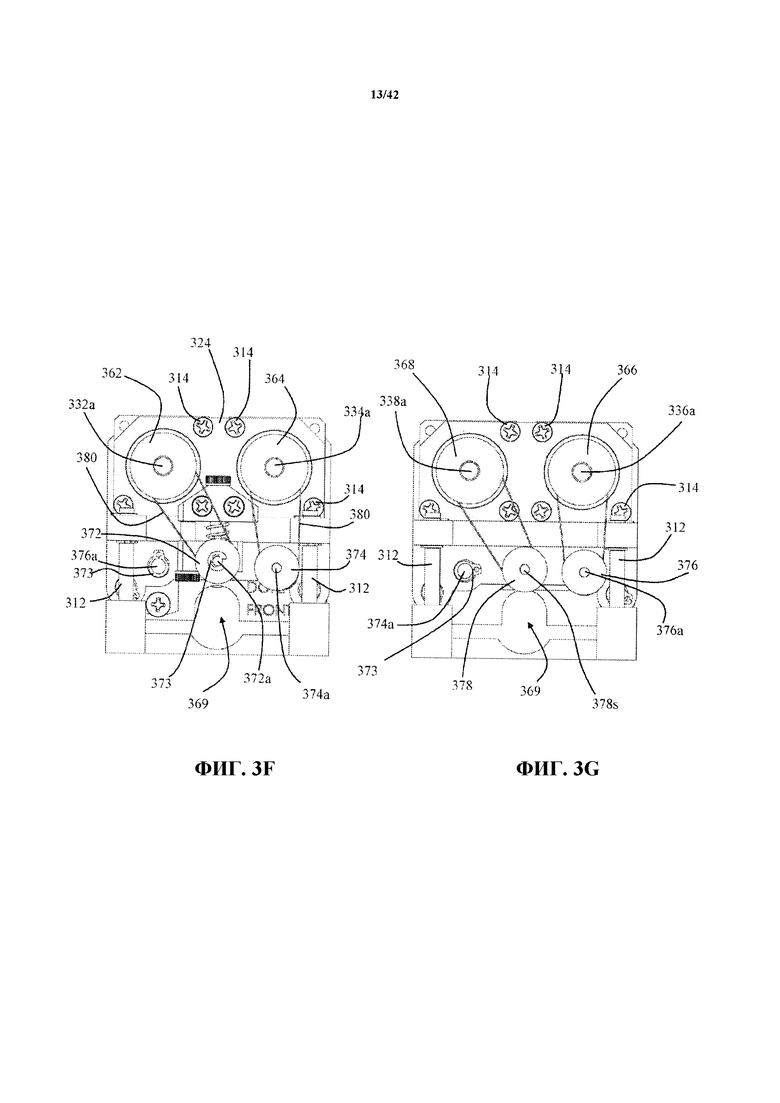
На фиг. 3F представлен вид спереди сборки электродвигателей роботизированной хирургической системы в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
На фиг. 3G представлен вид сзади сборки электродвигателей роботизированной хирургической системы в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
На фиг. 4А представлен перспективный вид сборки манипулятора роботизированной хирургической системы в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
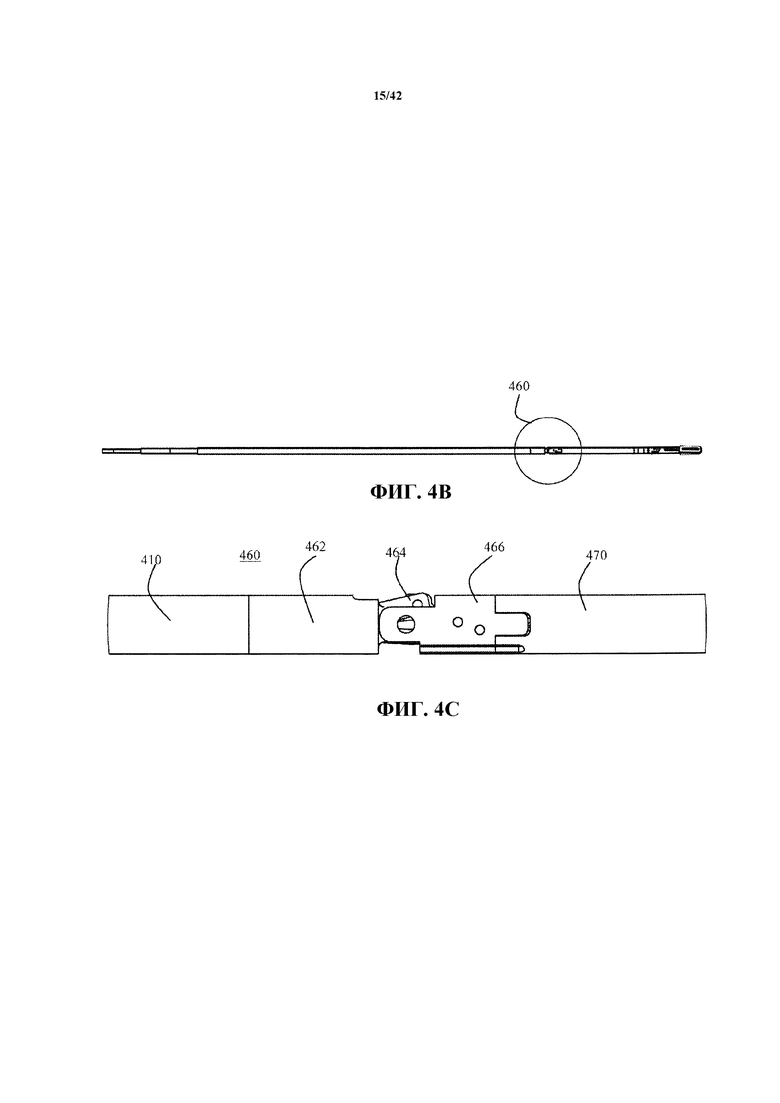
На фиг. 4В представлен первый вид сбоку сборки манипулятора, иллюстрирующий первую степень свободы роботизированной хирургической системы, в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
На фиг. 4С представлен увеличенный первый вид сбоку первой степени свободы сборки манипулятора роботизированной хирургической системы в соответствии с предпочтительным вариантом осуществления настоящего изобретения, представленной на фиг. 4В.
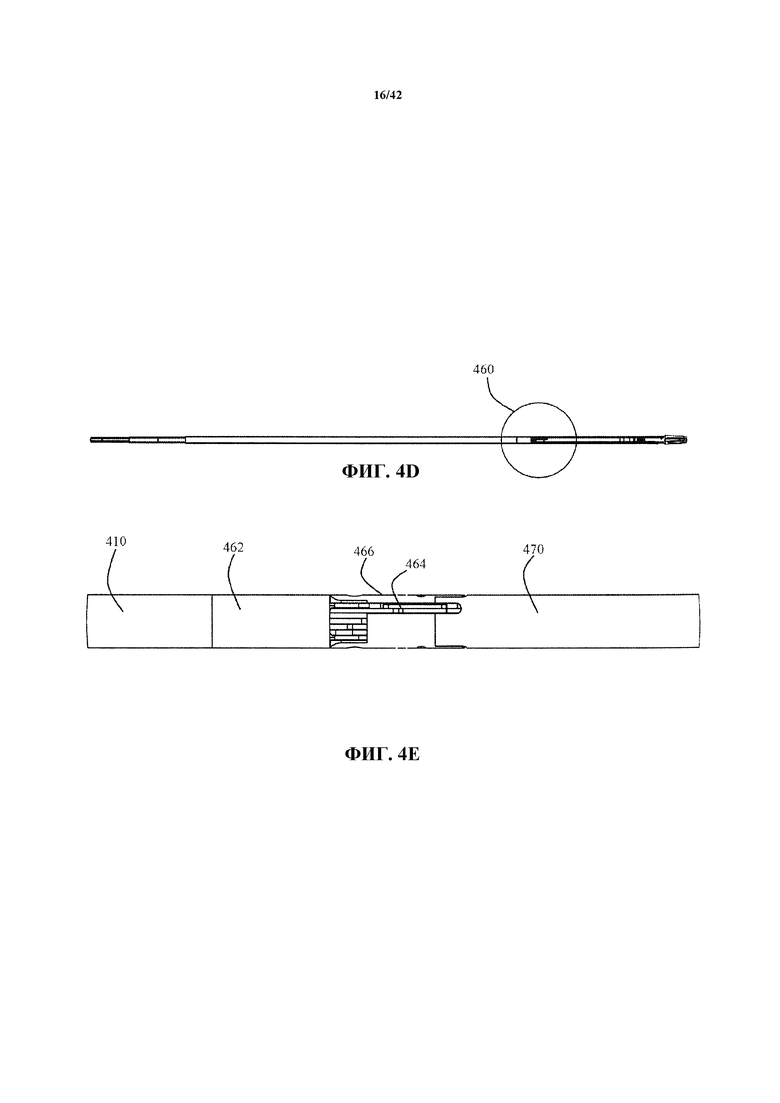
На фиг. 4D представлен второй вид сбоку сборки манипулятора, иллюстрирующий первую степень свободы роботизированной хирургической системы, в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
На фиг. 4Е представлен второй вид сбоку первой степени свободы сборки манипулятора роботизированной хирургической системы в соответствии с предпочтительным вариантом осуществления настоящего изобретения, представленной на фиг. 4D.
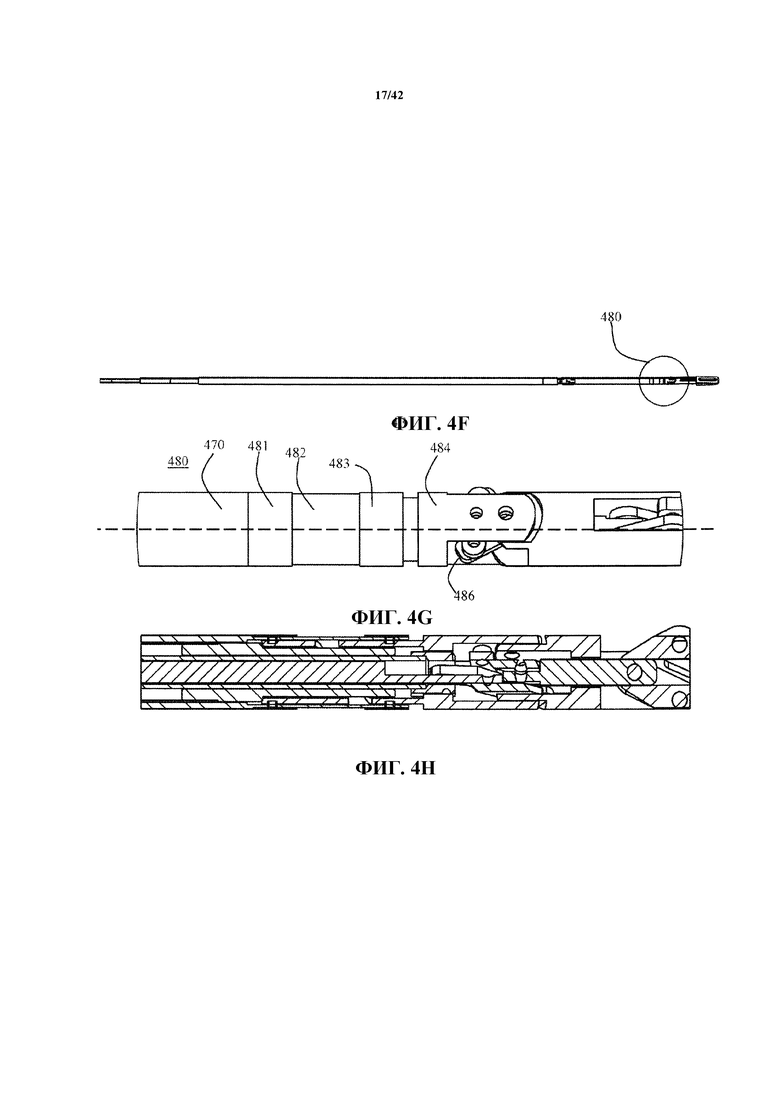
На фиг. 4F представлен первый вид сбоку сборки манипулятора, иллюстрирующий вторую степень свободы роботизированной хирургической системы, в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
На фиг. 4G представлен первый вид сбоку второй степени свободы сборки манипулятора роботизированной хирургической системы в соответствии с предпочтительным вариантом осуществления настоящего изобретения, представленной на фиг. 4F.
На фиг. 4Н представлено первое поперечное сечение второй степени свободы сборки манипулятора роботизированной хирургической системы в соответствии с предпочтительным вариантом осуществления настоящего изобретения, представленной на фиг. 4F.
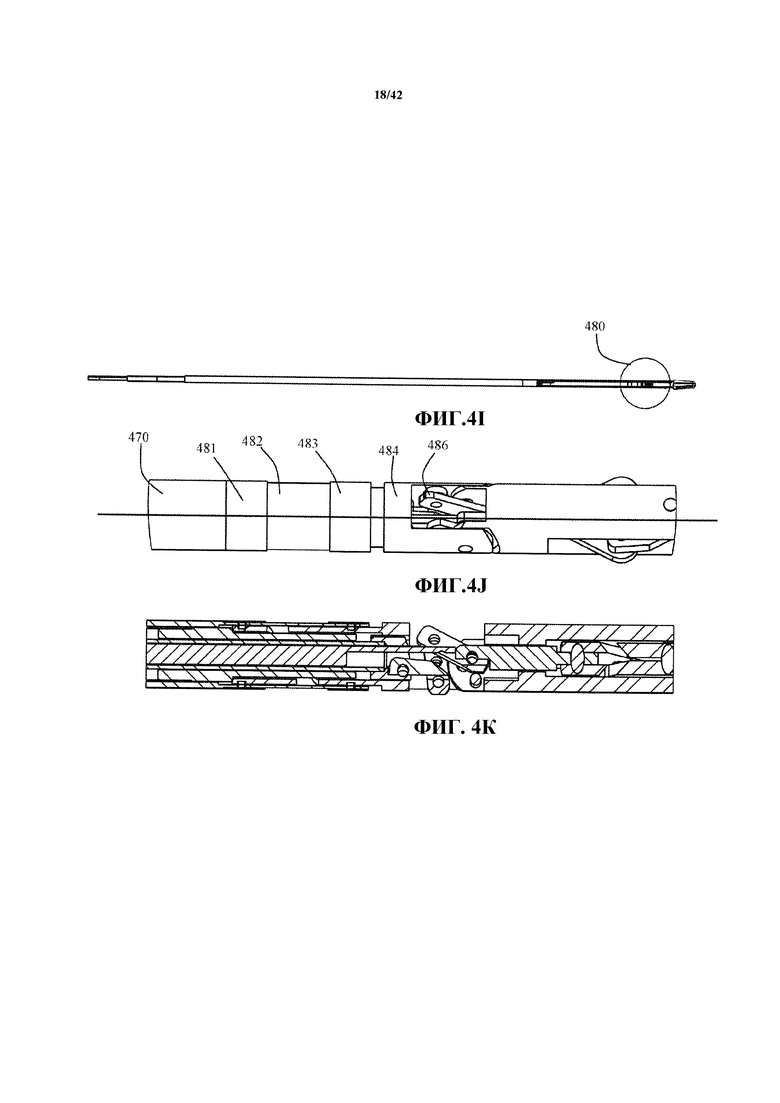
На фиг. 41 представлен второй вид сбоку сборки манипулятора, иллюстрирующий вторую степень свободы роботизированной хирургической системы в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
На фиг. 4J представлен второй вид сбоку второй степени свободы сборки манипулятора роботизированной хирургической системы в соответствии с предпочтительным вариантом осуществления настоящего изобретения, представленной на фиг. 41.
На фиг. 4K представлено второе поперечное сечение второй степени свободы сборки манипулятора роботизированной хирургической системы в соответствии с предпочтительным вариантом осуществления настоящего изобретения, представленной на фиг. 41.
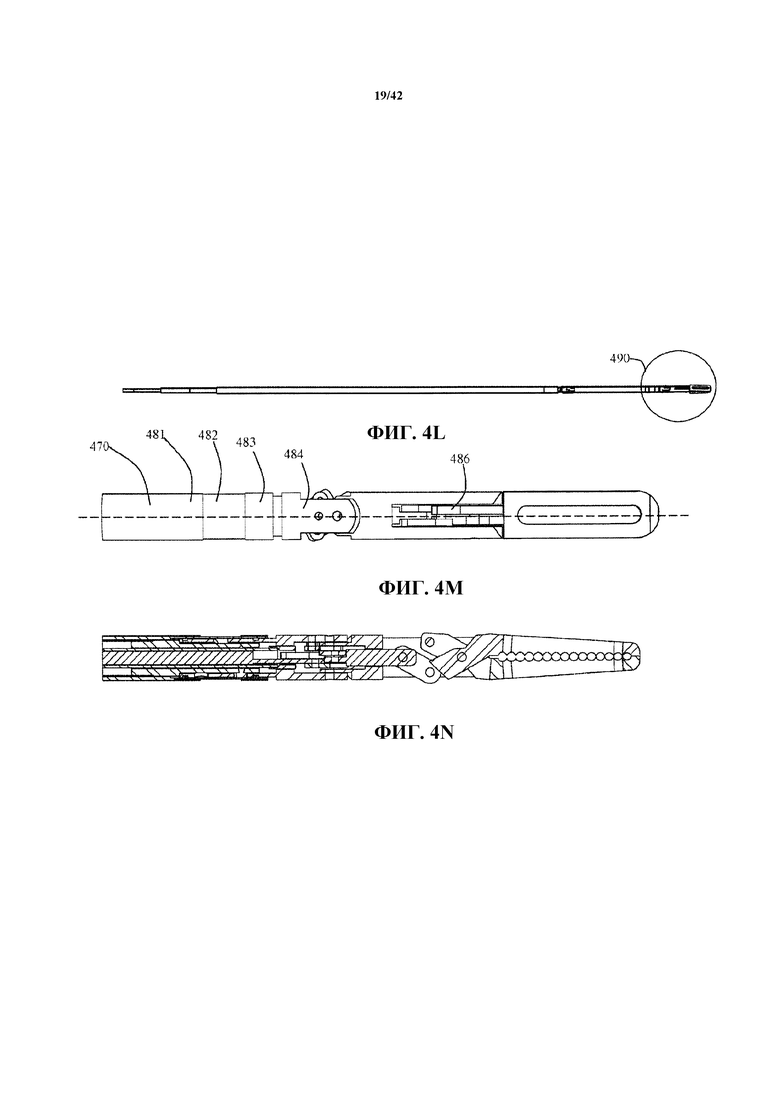
На фиг. 4L представлен вид сбоку сборки манипулятора, иллюстрирующий третью степень свободы роботизированной хирургической системы в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
На фиг. 4М представлен вид сбоку третьей степени свободы сборки манипулятора роботизированной хирургической системы в соответствии с предпочтительным вариантом осуществления настоящего изобретения, представленной на фиг. 4L.
На фиг. 4N представлено поперечное сечение третьей степени свободы сборки манипулятора роботизированной хирургической системы в соответствии с предпочтительным вариантом осуществления настоящего изобретения, представленной на фиг. 4L.
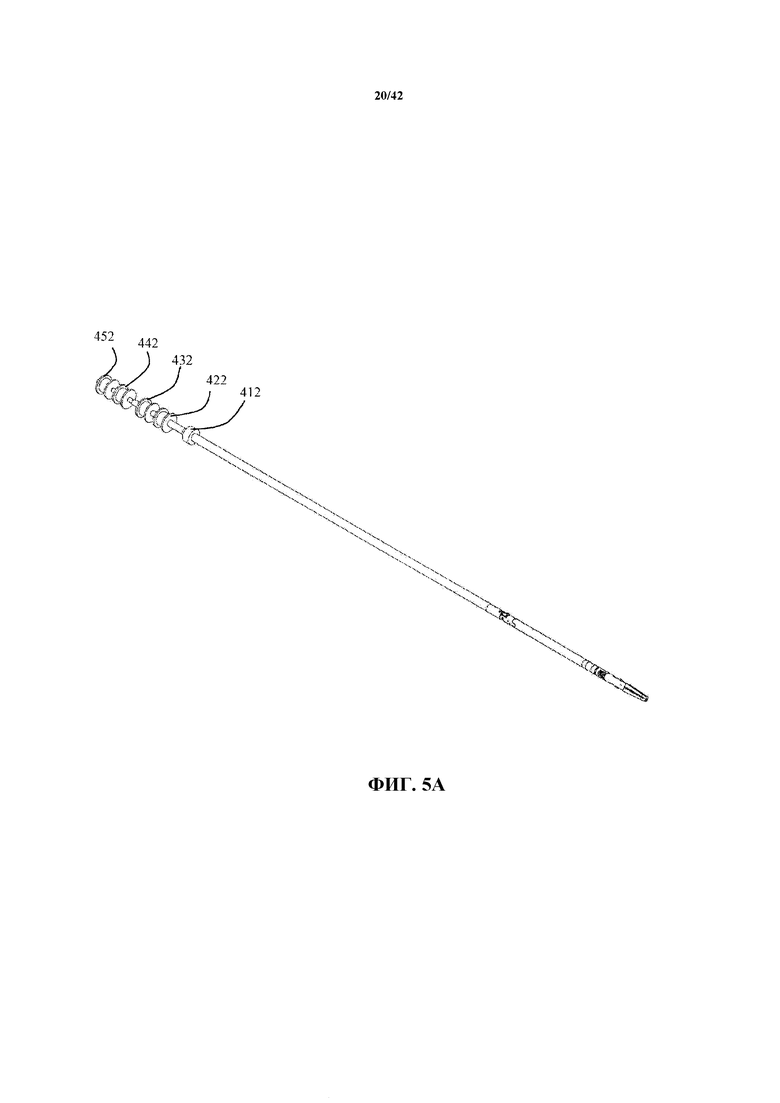
На фиг. 5А представлен перспективный вид сборки манипулятора в соответствии с предпочтительным вариантом осуществления настоящего изобретения до ее соединения со сборкой электродвигателей в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
На фиг. 5В представлен перспективный вид снизу сборки электродвигателей со сборкой манипулятора в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
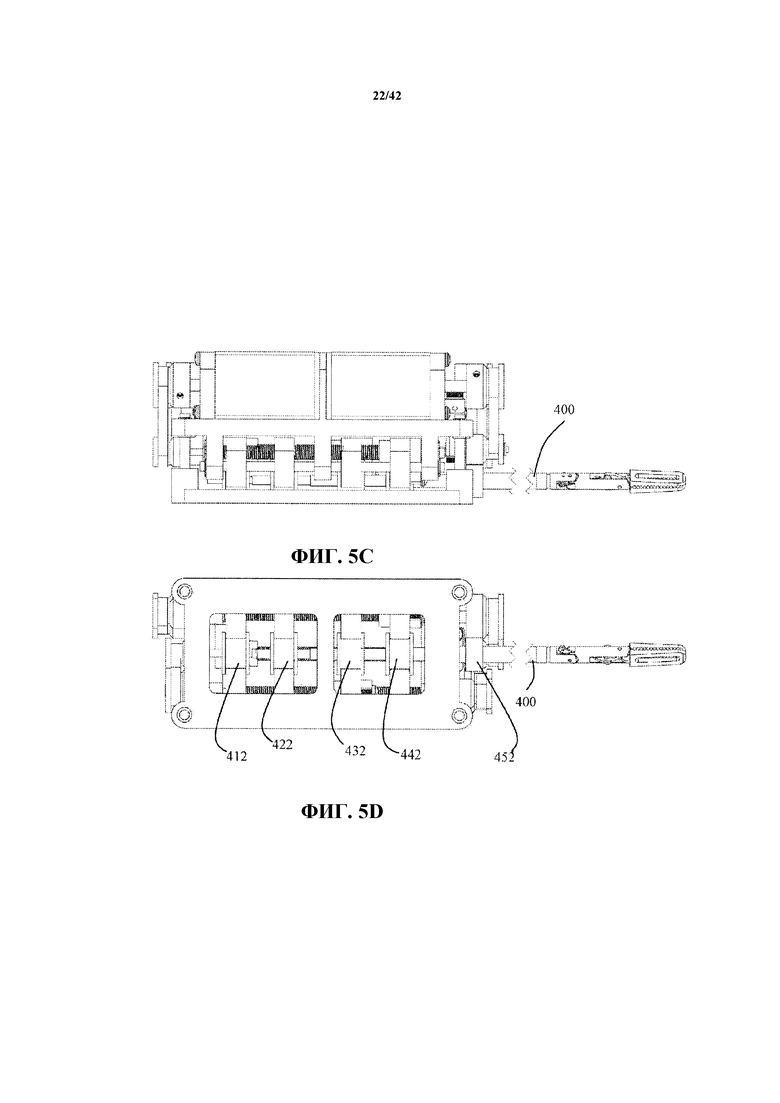
На фиг. 5С представлен первый вид сбоку сборки электродвигателей со сборкой манипулятора в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
На фиг. 5D представлен вид сверху сборки электродвигателей со сборкой манипулятора в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
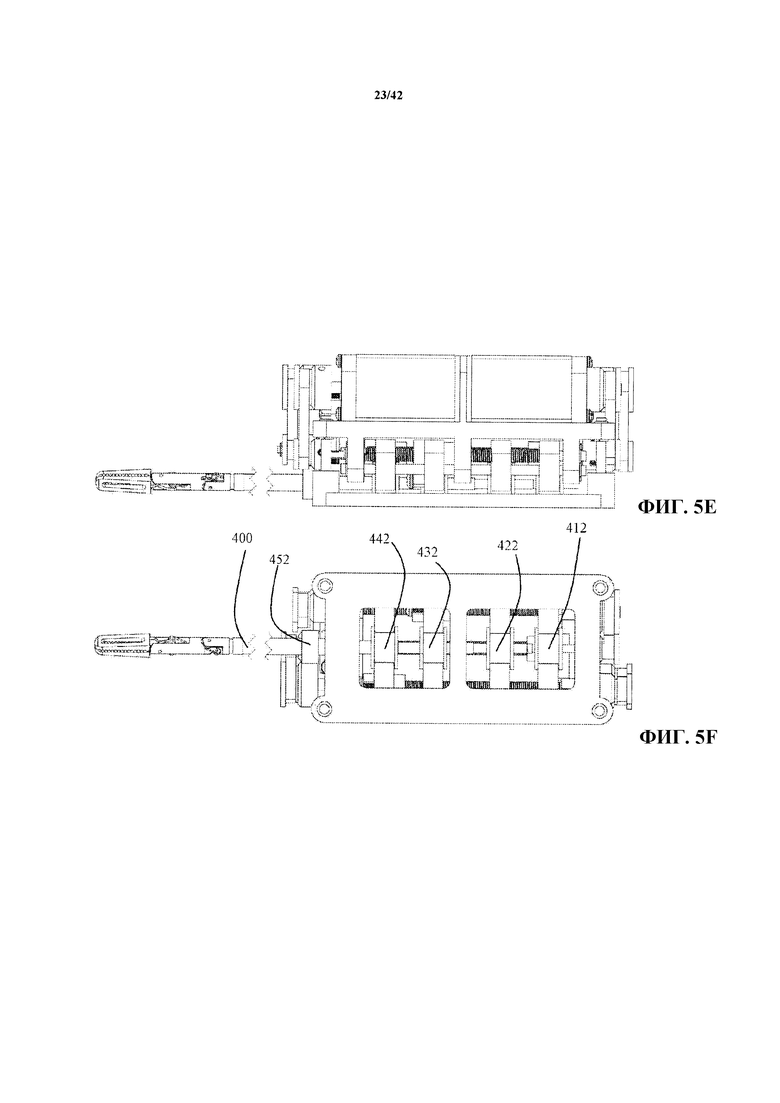
На фиг. 5Е представлен второй вид сбоку сборки электродвигателей со сборкой манипулятора в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
На фиг. 5F представлен вид сверху сборки электродвигателей со сборкой манипулятора в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
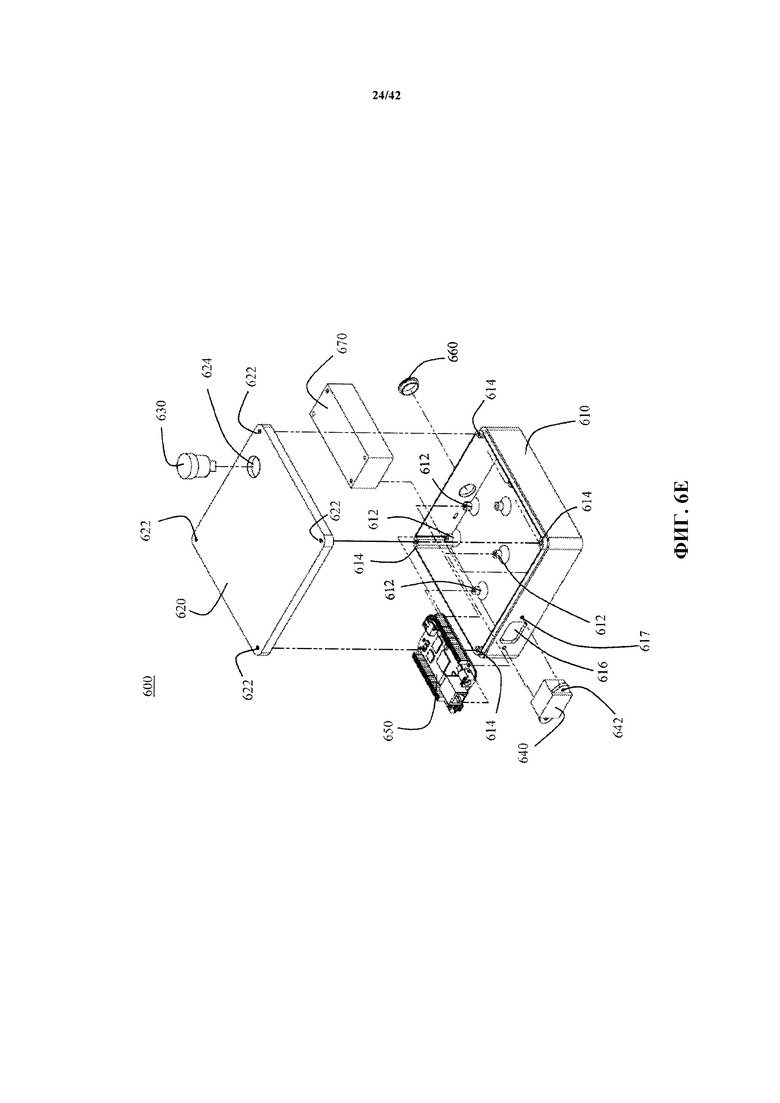
На фиг. 6 представлена сборка блока управления в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
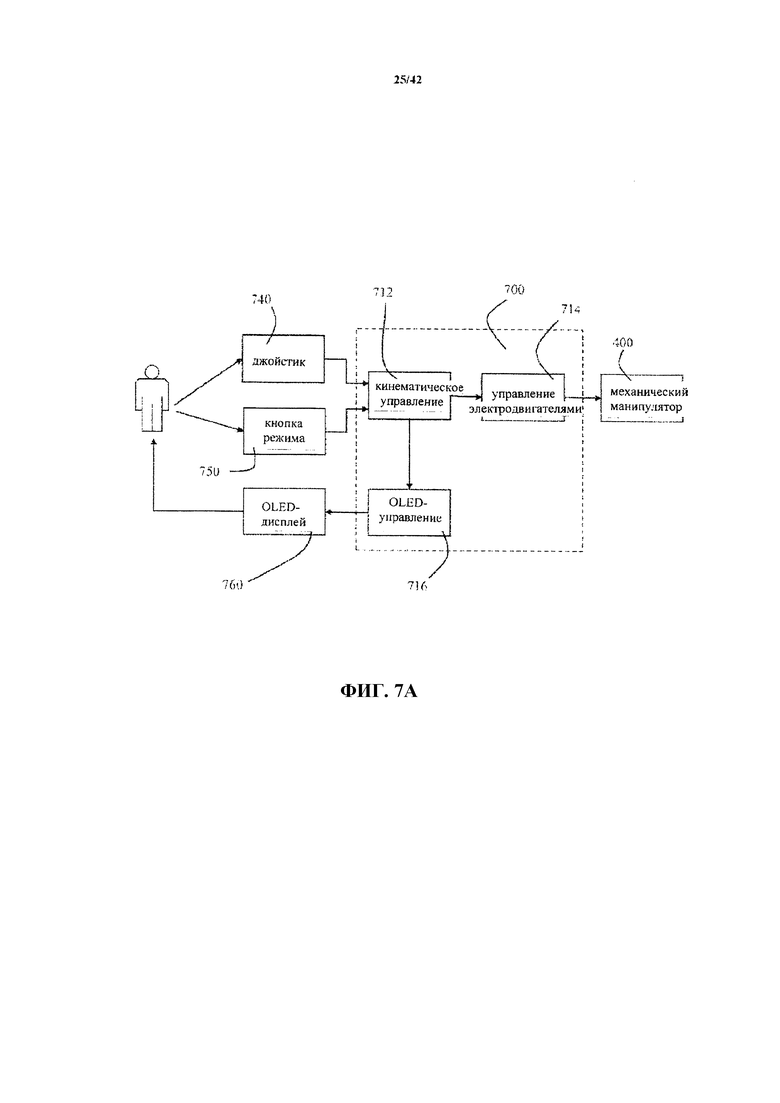
На фиг. 7А представлена блок-схема архитектуры высокого уровня системы в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
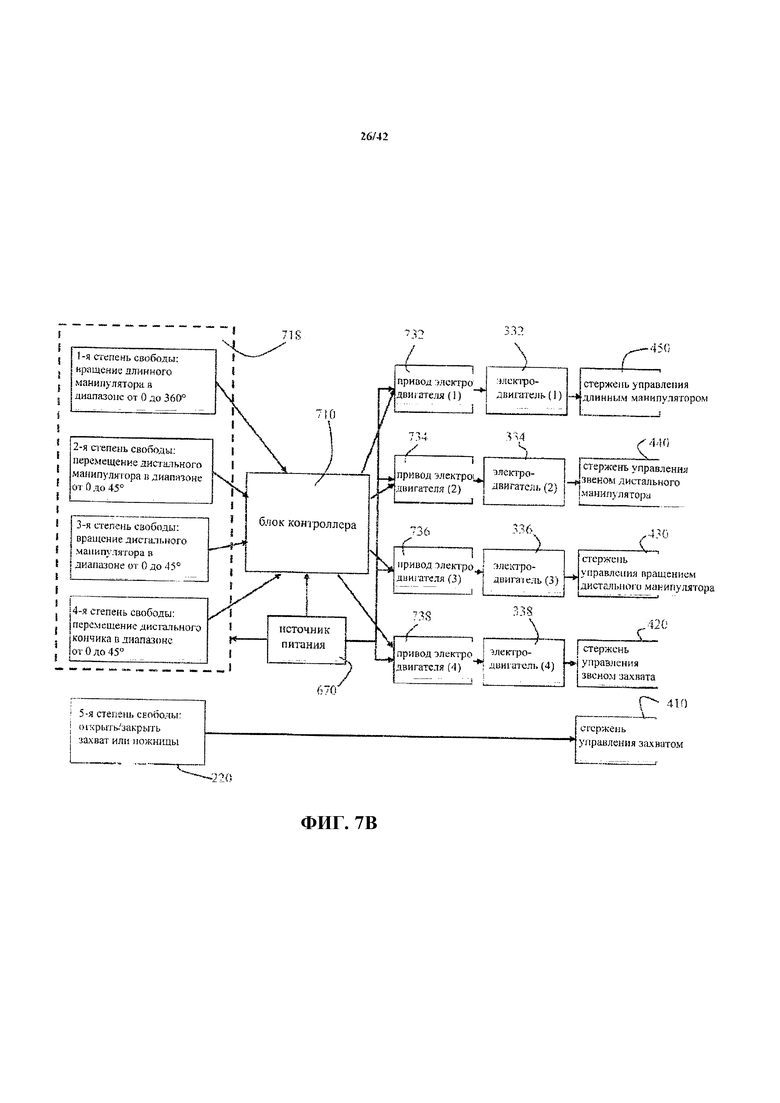
На фиг. 7В представлена блок-схема, иллюстрирующая архитектуру роботизированной хирургической системы в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
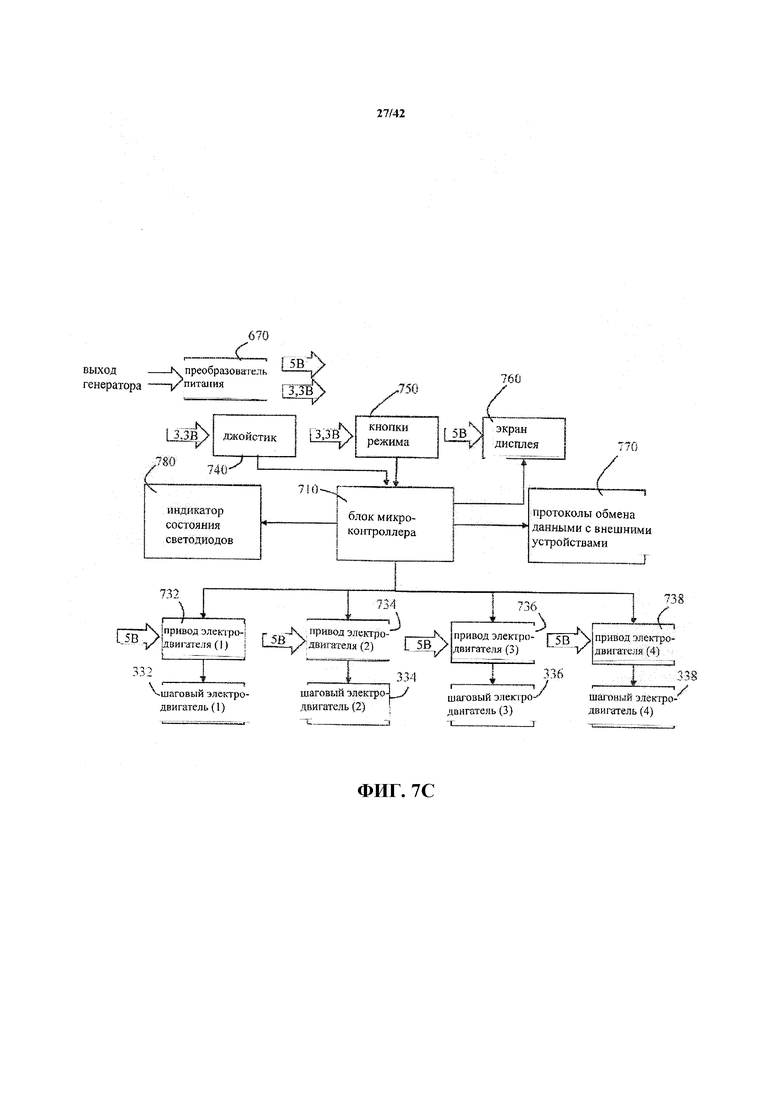
На фиг. 7С представлена блок-схема пульта управления в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
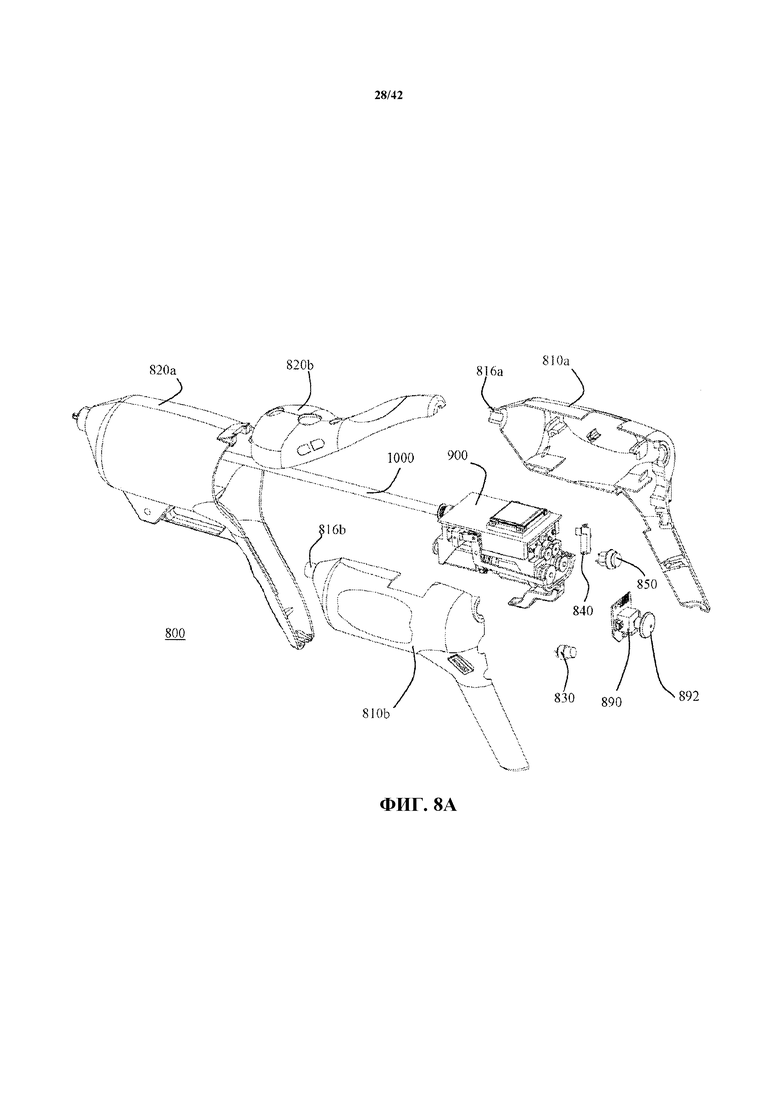
На фиг. 8А представлен чертеж сборки роботизированной хирургической системы в соответствии с альтернативным предпочтительным вариантом осуществления настоящего изобретения.
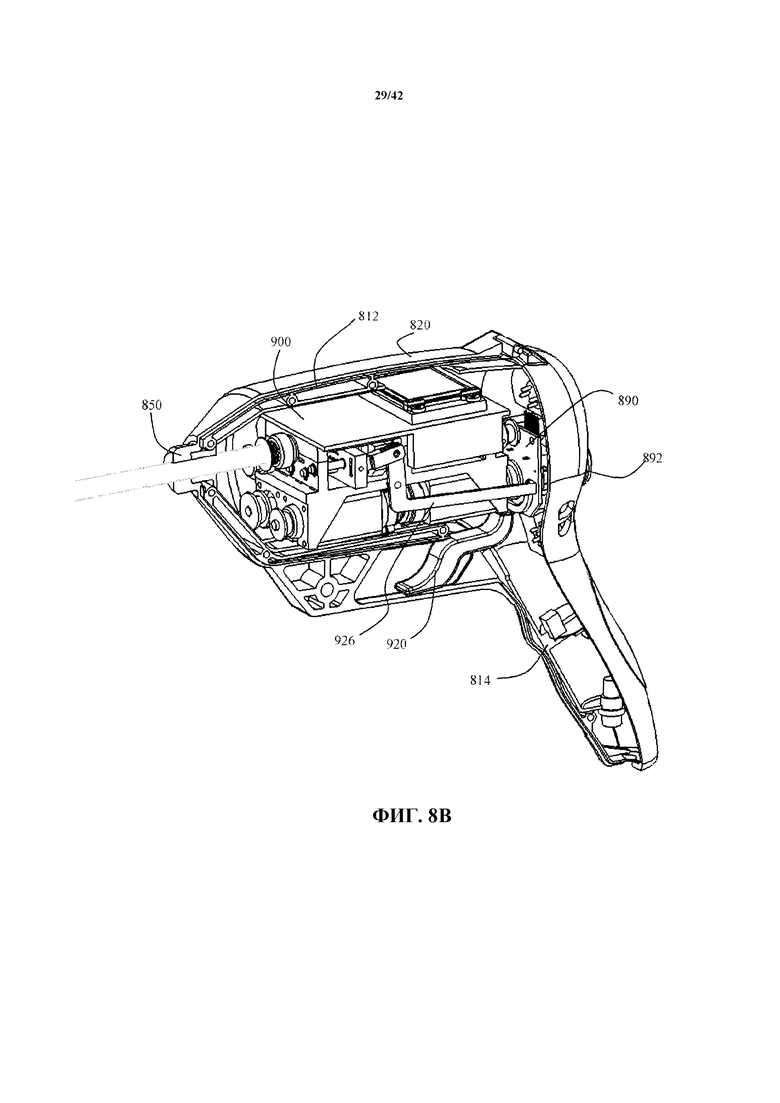
На фиг. 8В представлен перспективный вид сбоку внутренней части ручного блока роботизированной хирургической системы в соответствии с альтернативным предпочтительным вариантом осуществления настоящего изобретения.
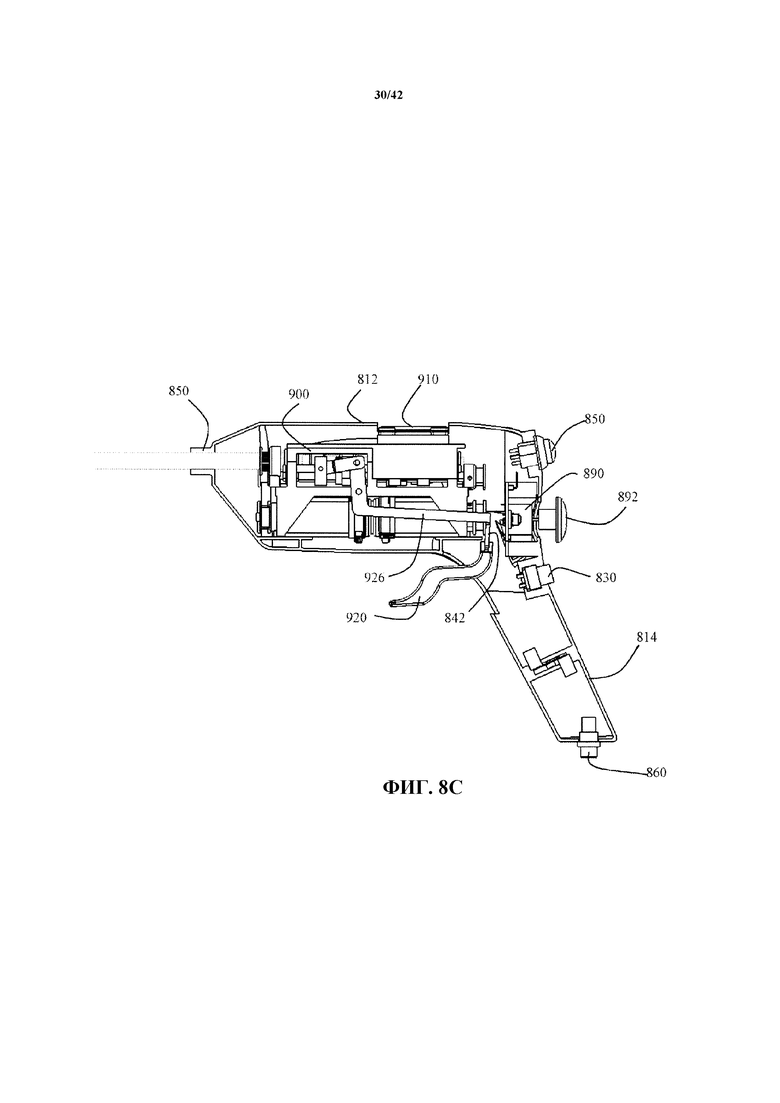
На фиг. 8С представлен вид сбоку внутренней части ручного блока роботизированной хирургической системы в соответствии с альтернативным предпочтительным вариантом осуществления настоящего изобретения.
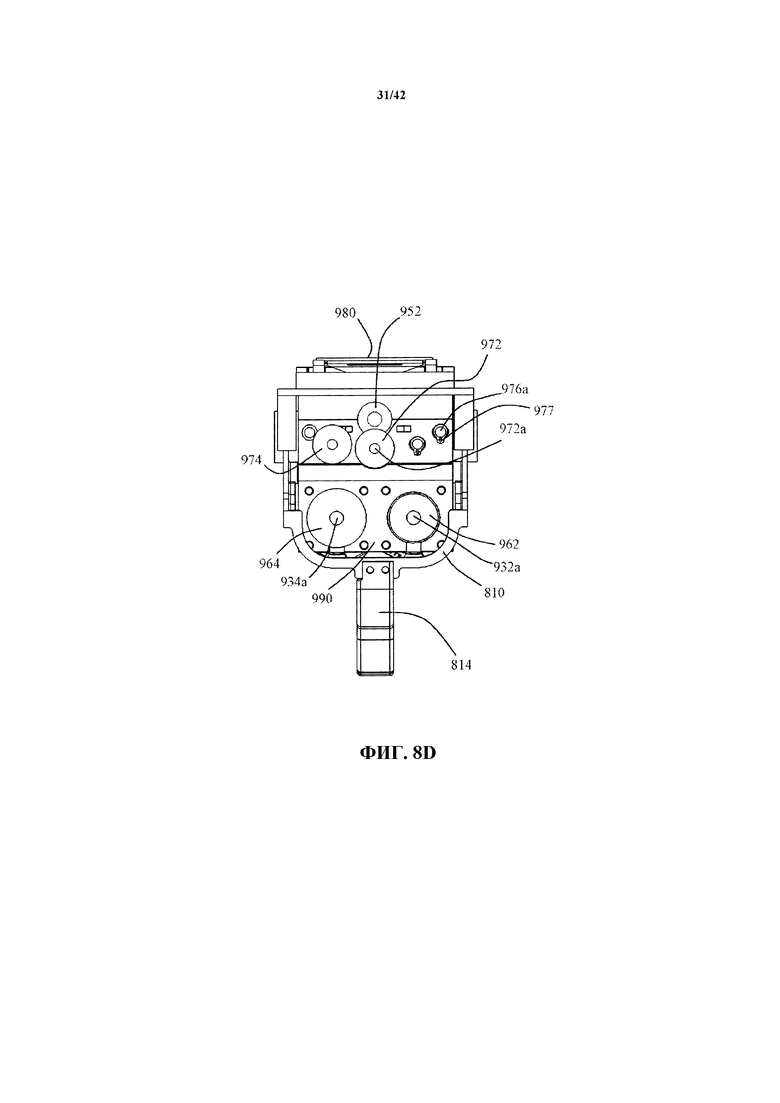
На фиг. 8D представлен вид спереди внутренней части ручного блока роботизированной хирургической системы в соответствии с альтернативным предпочтительным вариантом осуществления настоящего изобретения.
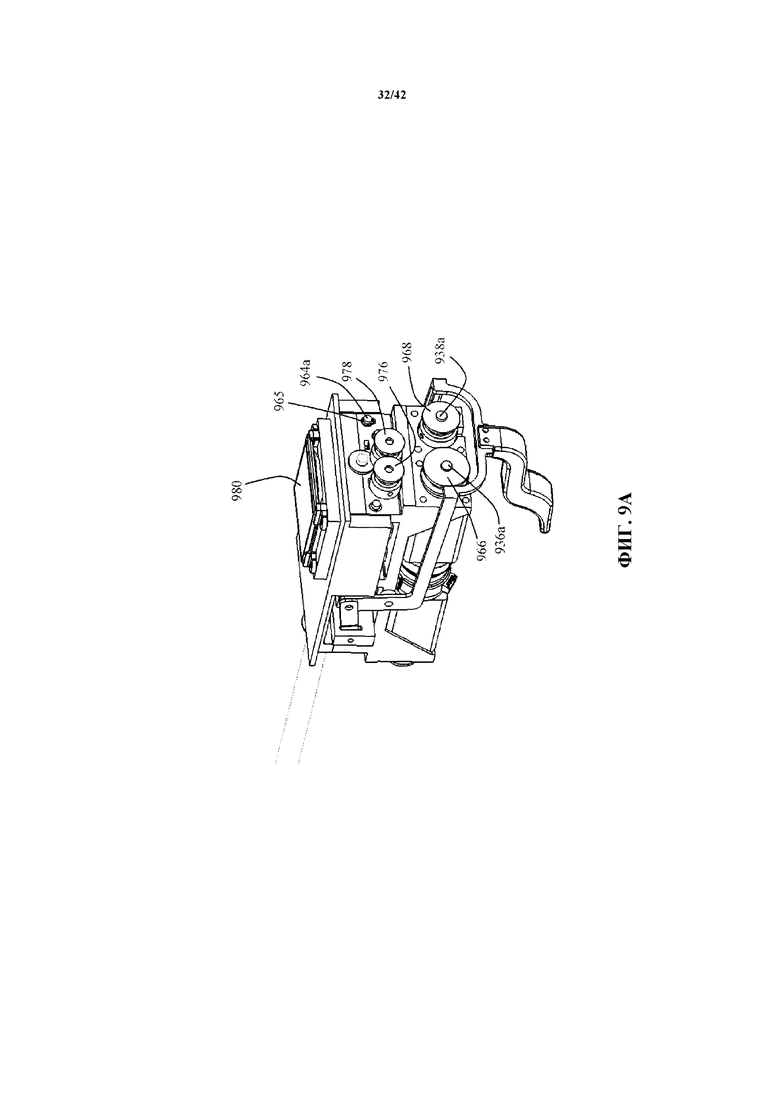
На фиг. 9А представлен перспективный вид сзади сборки электродвигателей в соответствии с альтернативным предпочтительным вариантом осуществления настоящего изобретения.
На фиг. 9В представлен вид сбоку сборки электродвигателей в соответствии с альтернативным предпочтительным вариантом осуществления настоящего изобретения.
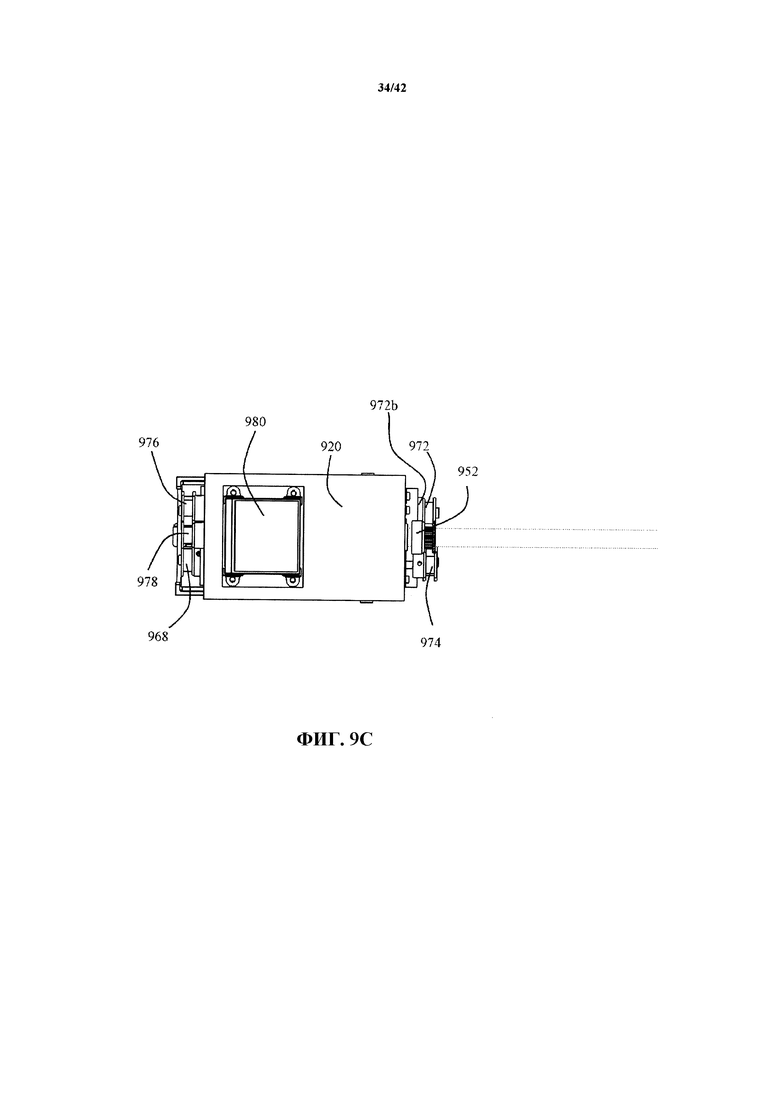
На фиг. 9С представлен вид сверху сборки электродвигателей в соответствии с альтернативным предпочтительным вариантом осуществления настоящего изобретения.
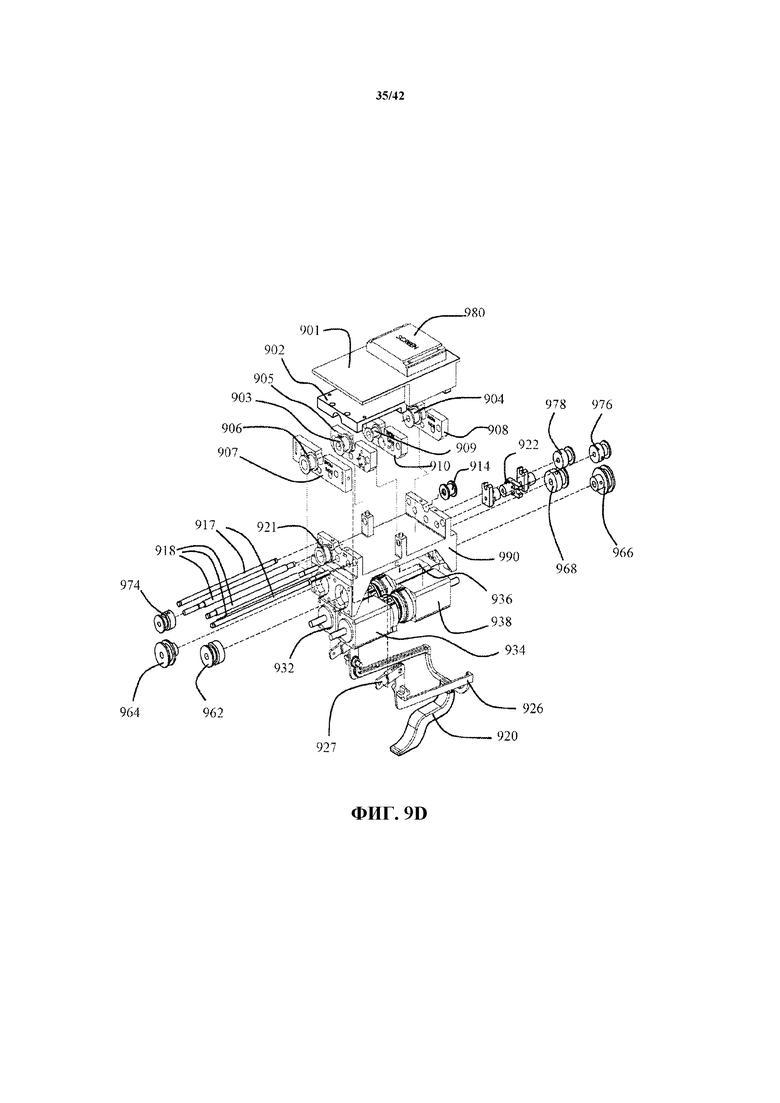
На фиг. 9D представлен общий перспективный вид сборки манипулятора,
На фиг. 10А представлен перспективный вид сборки манипулятора роботизированной хирургической системы в соответствии с альтернативным предпочтительным вариантом осуществления настоящего изобретения.
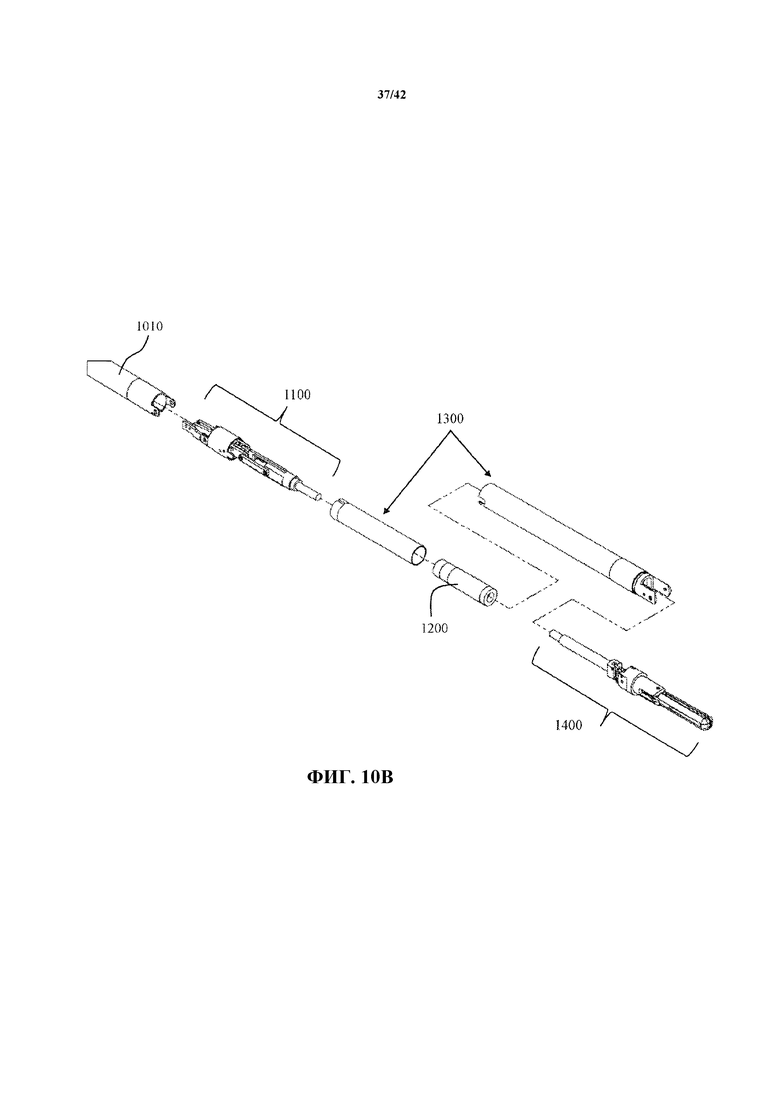
На фиг. 10В представлен перспективный вид сборки манипулятора роботизированной хирургической системы в соответствии с альтернативным предпочтительным вариантом осуществления настоящего изобретения.
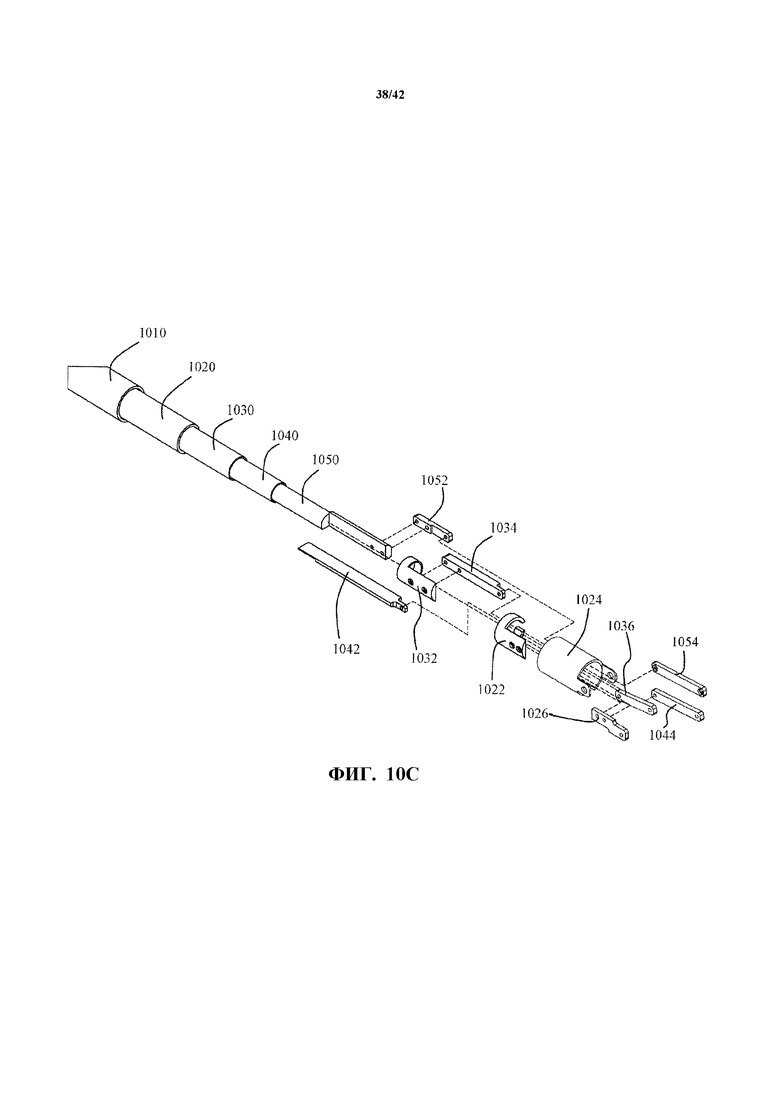
На фиг. 10С представлен перспективный вид секции привода сборки манипулятора роботизированной хирургической системы в соответствии с альтернативным предпочтительным вариантом осуществления настоящего изобретения.
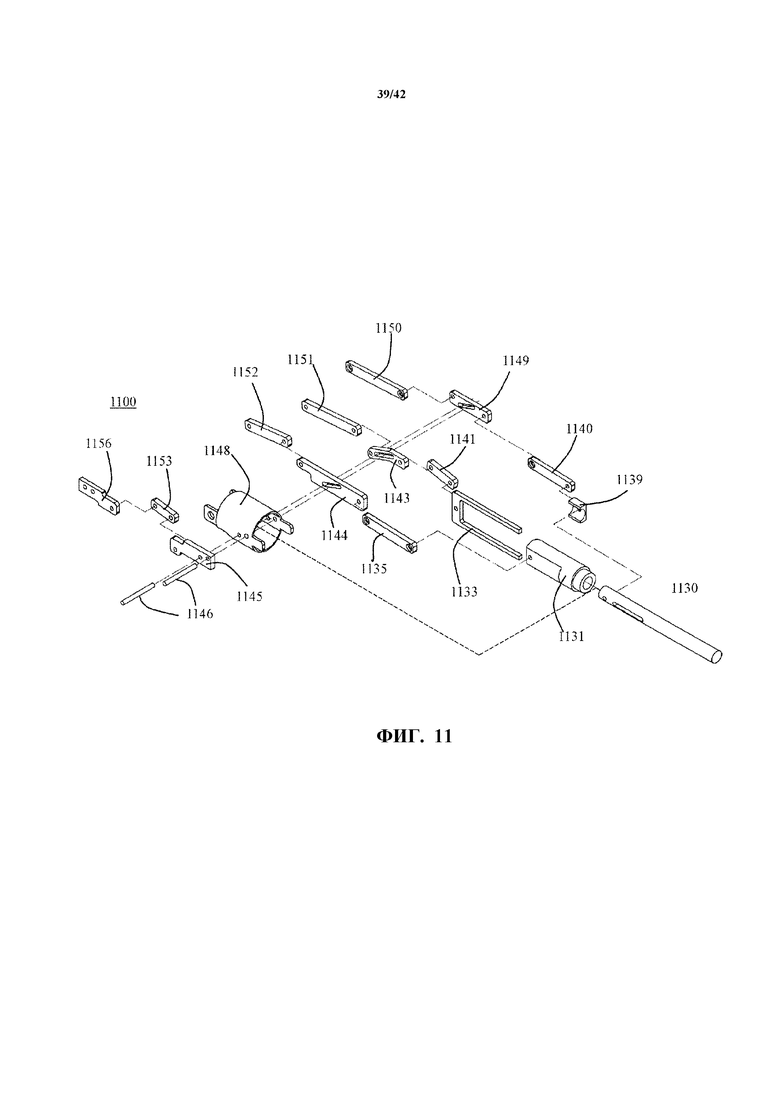
На фиг. 11 представлен перспективный вид сборки манипулятора, иллюстрирующий вторую степень свободы роботизированной хирургической системы в соответствии с альтернативным предпочтительным вариантом осуществления настоящего изобретения.
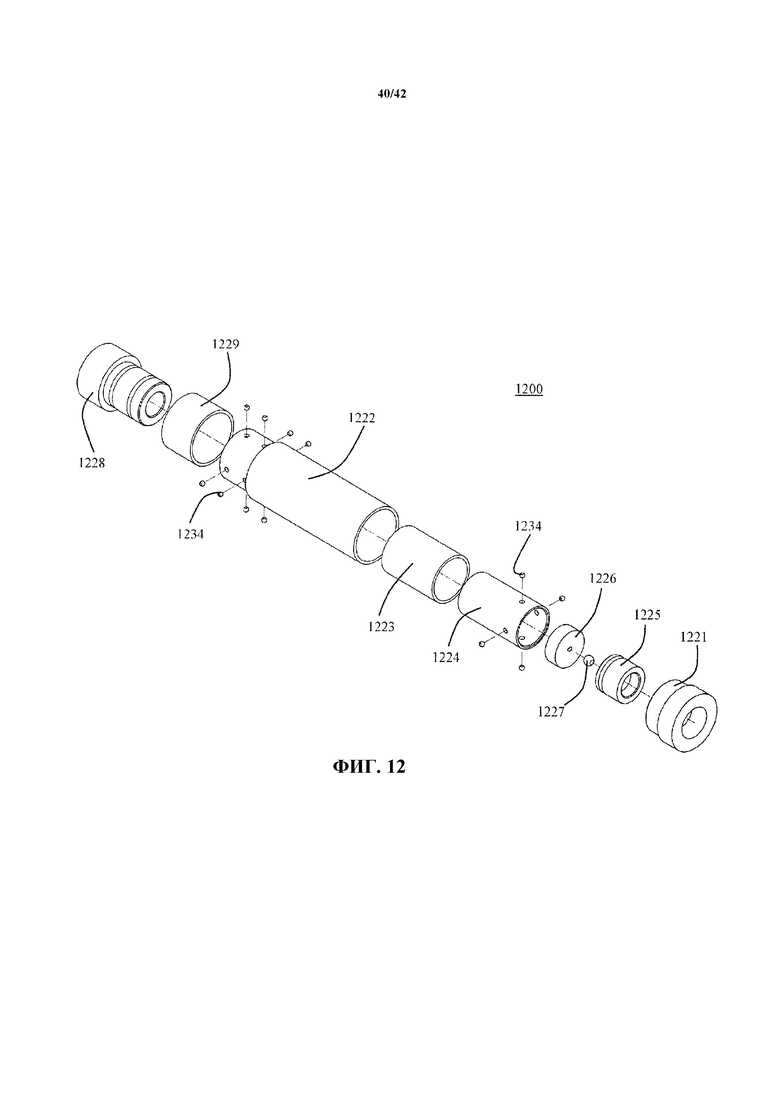
На фиг. 12 представлен перспективный вид сборки микровертлюга манипулятора в соответствии с альтернативным предпочтительным вариантом осуществления настоящего изобретения.
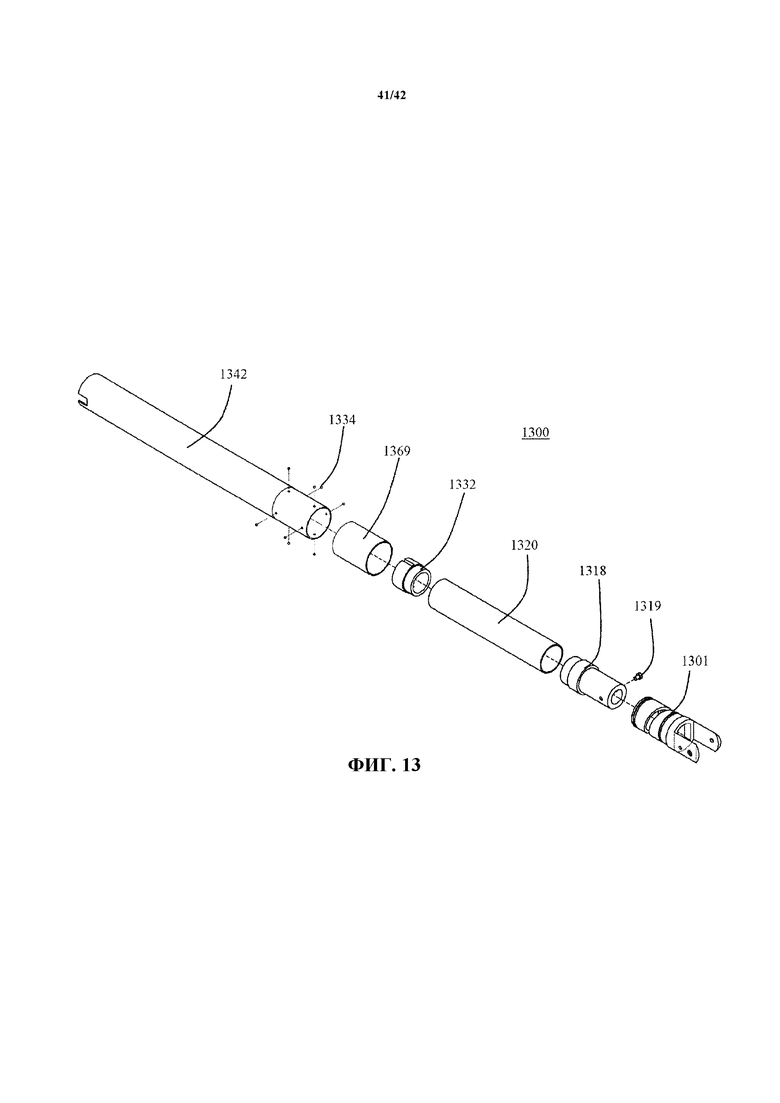
На фиг. 13 представлен перспективный вид сборки манипулятора, иллюстрирующий третью степень свободы роботизированной хирургической системы в соответствии с альтернативным предпочтительным вариантом осуществления настоящего изобретения.
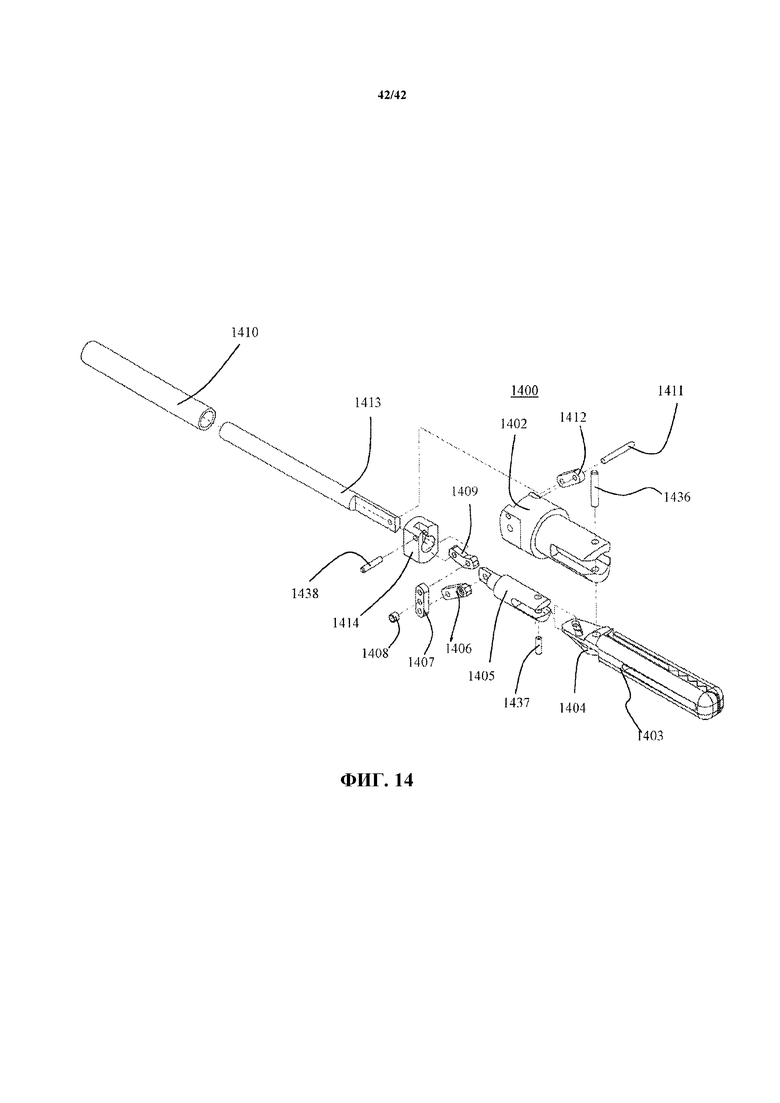
На фиг. 14 представлен перспективный вид сборки манипулятора, иллюстрирующий четвертую и пятую степени свободы роботизированной хирургической системы в соответствии с альтернативным предпочтительным вариантом осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ НАСТОЯЩЕГО ИЗОБРЕТЕНИЯ
Предпочтительные варианты осуществления настоящего изобретения описаны со ссылкой на чертежи. Как представлено на фиг. 1A-1I, роботизированная хирургическая система и вспомогательное оборудование по настоящему изобретению состоят в основном из трех компонентов: (1) кожуха, базы или ручного блока 200, сборки манипулятора 400 и системы привода или сборки электродвигателей (внутри кожуха 200, как представлено на фиг. 2В). Сборка электродвигателей 300 расположена внутри кожуха или базы 200. В соответствии с предпочтительным вариантом осуществления настоящего изобретения кожух или база 200 используется многократно и является платформой системы. Система привода или сборка электродвигателей 300 представляет собой одногнездовое хирургическое устройство доступа, которое позволяет вставлять сборку манипулятора в единственное гнездо. Сборка манипулятора 400 может быть многоразовой, одноразовой или частично многоразовым/частично одноразовым позиционирующим манипулятором для поддержки и позиционирования хирургических инструментов на дистальном конце манипулятора или около него.
Как представлено на фиг. 2А-2Е, в соответствии с предпочтительным вариантом осуществления настоящего изобретения кожух 200 может быть выполнен в форме кожуха 210, в состав которого входит корпусная часть 212 и рукоять 214. Кожух может быть сформирован из жестких материалов, таких как АБС-пластик. Ручной актуатор 220 предназначен для ручного приведения в действие хирургического инструмента, такого как щипцы, ножницы, зажимы и т.д., прикрепленного к дистальному концу сборки манипулятора 400. Как представлено на фиг. 2A-2I, актуатор 220 может иметь форму нажимной рукоятки, но актуатор или триггер 220 также может принимать любую другую известную форму. Носовой колпачок 250, например, изготовленный из армированного АБС-пластика, расположен на одной линии с гнездом в сборке электродвигателей для приема проксимального конца сборки манипулятора. Примыкающая к носовому колпачку 250 передняя часть 216 корпуса 212 может быть выполнена наклонной. Головка джойстика 292 выходит наружу кожуха 200 из коробки управления 600, расположенной внутри кожуха 200. Сборка электродвигателей 300 и коробка контроллера 600 расположены внутри кожуха 210. Аналогичным образом аккумуляторы для питания системы могут находиться внутри кожуха 210 и/или может быть предусмотрен электрический разъем для подключения к внешнему источнику питания.
Внутри кожуха 210 вместе со сборкой электродвигателей 300 и коробкой контроллера 600 расположена поворотная ось 224, вокруг которой вращается актуатор 220, передаточное звено 226 для передачи перемещения актуатора 220 на тягу управления в сборке манипулятора 200 для открывания, закрывания или иного ручного воздействия на хирургический инструмент на дистальном конце сборки манипулятора 200. Край передаточного звена 226 может выполняться ребристым или зубчатым для зацепления с зажимным кулачком 228 с целью фиксации актуатора в желаемом положении. Кроме того, предусмотрен элемент или элементы сброса 225, 227 для ручной разблокировки зажимного кулачка 228. Актуатор 220 может выполняться уширенным с отверстием для соединения с передаточным звеном 226 с целью создания рычажного плеча актуатора. Кроме того, может быть предусмотрено дополнительное звено 229 для передачи перемещения актуатора 220 на тягу управления в сборке манипулятора 200.
В соответствии с предпочтительным вариантом осуществления настоящего изобретения сборка электродвигателей 300 описана со ссылкой на фиг. 3A-3G. В состав сборки электродвигателей входит рама, образованная множеством элементов 310, 320, 322, 324, соединенных вместе, например, с помощью стержней или штифтов 312, 316, фиксирующих зажимов 313 и винтов 314. В состав рамы, представленной на чертежах и описанной здесь, входит несколько частей, соединенных вместе, при этом могут быть использованы другие конструкции рамы с меньшим или большим количеством составных элементов. Кроме того, электродвигатели могут быть установлены в кожухе другими способами без использования рамы.
В состав сборки электродвигателей входит множество электродвигателей 332, 334, 336, 338, прикрепленных к раме, например, с помощью винтов 314. Могут быть использованы и другие средства крепления электродвигателей к раме, такие как болты, штифты, клей или любые другие средства. В соответствии с предпочтительным вариантом осуществления настоящего изобретения электродвигатели представляют собой компактные микрошаговые электродвигатели с высоким крутящим моментом. В то время как в данном документе представлено и описано четыре электродвигателя, можно использовать любое другое число электродвигателей. На выходе каждого электродвигателя 332, 334, 336, 338 установлен приводной вал 332а, 334а, 336а, 338а. В плане электродвигатели 332, 334, 336, 338 составляют матрицу 2×2, причем приводные валы 332а, 334а двух электродвигателей 332, 334 выходят в первом направлении, а приводные валы 336а, 338а двух других электродвигателей 336, 338 выходят во втором направлении, противоположном первому. В шкивах 362, 364, 366, 368 предусмотрена канавка для приема приводной ленты, и они соединены с каждым приводным валом 332а, 334а, 336а, 338а каждого электродвигателя 332, 334, 336, 338.
Каждый шкив 362, 364, 366, 368 соединен со вторичным шкивом 372, 374, 376, 378 посредством приводной ленты 380. Каждый вторичный шкив 374, 376, 378 соединен с приводным винтом 394, 396, 398, которые установлены в раме с помощью штоков 374а, 376а, 378а. Вторичный шкив 372 соединен с фрикционным приводом 372а. Вторичные шкивы крепятся к фрикционному приводу или штокам, например, с помощью фиксирующих зажимов 373.
В соответствии с предпочтительным вариантом осуществления настоящего изобретения сборка манипулятора 400 описана со ссылкой на фиг. 1I и 4A-4N. Как представлено на фиг. 1I, сборка манипулятора 400 имеет четыре степени свободы DOF1, DOF2, DOF3, DOF4, управляемые электродвигателями 332, 334, 336, 338, и одну степень свободы DOF5, управляемую актуатором 220. В состав сборки манипулятора 400 входит множество вложенных стержней управления 410, 420, 430, 440, 450 для управления различными степенями свободы сборки манипулятора. Стержень управления 410, также называемый длинным манипулятором, управляет первой степенью свободы DOF1, которая обеспечивает поворот всей сборки манипулятора в диапазоне 0-360°. Стержень управления 420 управляет второй степенью свободы DOF2, которая обеспечивает изгиб сустава 460 в диапазоне 0-45°. Стержень управления 430 управляет третьей степенью свободы DOF3, который обеспечивает вращение дистального манипулятора 470 в диапазоне 0-180°. Стержень 420 управляет четвертой степенью свободы DOF4, которая обеспечивает изгиб сустава 480 в диапазоне 0-45°. Стержень управления 410 управляет перемещением хирургического инструмента 490 на дистальном конце сборки манипулятора, например, при открытии и закрытии. Первые четыре степени свободы DOF1-DOF4 управляются электродвигателями 332, 334, 336, 338, а пятая степень свободы DOF5 управляется актуатором 220.
Сустав 460 обеспечивает вторую степень свободы DOF2 и более подробно представлен на фиг. 4В-4Е. Длинный манипулятор 410 соединен с элементом сустава 462. Элемент сустава 466 соединен с элементом сустава 462 с помощью шарнирного соединения и с дистальным манипулятором 470. Звено 464 соединено со стержнем управления 420 и обеспечивает ограниченное перемещение между шарнирными элементами 462, 466.
Сустав 480 обеспечивает третью степень свободы DOF3 и более подробно представлен на фиг. 4F-4K. Дистальный манипулятор 470 соединен с элементами 481, 482, 483. Шарнирный элемент 484 соединен с управляющим стержнем, который обеспечивает четвертую степень свободы DOF4, которая обеспечивается вращением шарнирного элемента 484. При вращении шарнирного элемента 484 на дистальном конце сборки манипулятора вращается хирургический инструмент 490. Хирургический инструмент 490 соединен с шарнирным элементом 484 и звеном 486, которое соединено с манипулятором управления для обеспечения изгиба между шарнирным элементом 484 и хирургическим инструментом 490. На фиг. 4L-4N представлен типовой хирургический инструмент 490.
Как показано на фиг. 5А, при монтаже сборки электродвигателей ролики 412, 422, 432, 442 соединяются с управляющими стержнями 410, 420, 430, 440. Фрикционный элемент 452 соединяется с управляющим стержнем 450. Проксимальная часть сборки манипулятора вставляется в канал 369 сборки электродвигателя 300. После установки фрикционный элемент 452 входит в зацепление с фрикционным приводом 366а. Ролики 422, 432, 442 соединены с приводными винтами 392, 394, 396. Ролик 412 соединен с актуатором 220 и соответствующими конструкциями.
Система снабжена коробкой управления, такой как представлена на фиг. 6. В состав коробки управления 600 входит основание коробки 610 и крышка 620. Для крепления крышки 620 к коробке 600 в основании коробки 610 предусмотрены специальные средства, такие как резьбовые отверстия или тому подобное 614. В крышке 620 выполнены отверстия 622 под винты или другие крепежные элементы (не представлены) для крепления крышки 620 к основанию коробки 610. С одной стороны в основании коробки 610 выполнено отверстие 616 для приема входного разъема питания 640, который может, например, крепиться к основанию коробки 610 винтами, проходящими через отверстия 642, в резьбовых отверстиях 617 основания коробки. Для приема разъема робота 660 в основании коробки 610 выполнено другое отверстие. Внутри основания коробки 610 располагается преобразователь питания 670 и соединительная или печатная плата 650, монтируемая в основании коробки на опорных элементах 612. Под выключатель с подсветкой 630 в крышке 620 выполнено отверстие 624. Разъем входного питания подключен к соединительной плате, которая подключена к блоку преобразователя. Блок преобразователя преобразует входную мощность от электрохирургического генератора, настенной розетки или другого источника питания и выводит преобразованную мощность через разъем робота 660 на ручной блок роботизированного хирургического инструмента.
На фиг. 7А представлен типовой процесс управления. Хирург управляет роботизированной хирургической системой через элементы управления на ручном блоке. В состав элементов управления входит джойстик 740 и кнопка или кнопки режима 750. Хирург может просматривать сообщения о рабочем состоянии и/или настройках на OLED-дисплее 760 (описанном в связи с альтернативным вариантом осуществления настоящего изобретения, обсуждаемым ниже). В системе управления 700 предусмотрено кинематическое управление 712 и управление двигателем 714 для управления механическим манипулятором 400 и OLED-управление 716 для управления OLED-дисплеем 760.
На фиг. 7В представлена типовая структура системы управления. Четыре степени свободы DOF1, DOF2, DOF3, DOF4 (718) контролируются с помощью джойстика 290 в ручном блоке. Блок контроллера 710, расположенный в ручном блоке, посылает управляющие сигналы через приводы электродвигателей 732, 734, 736, 738 для управления четырьмя электродвигателями 332, 334, 336, 338. В качестве источника питания 670 могут использоваться батареи в корпусе 210 или питание может быть обеспечено от внешнего источника, например, от коробки управления 600, через электрический разъем в корпусе. От источника питания запитываются электродвигатели, блок контроллера и коробка контроллера 600 джойстика. Хотя в качестве предпочтительного варианта осуществления приводится контроллер джойстика 290, в настоящем изобретении могут использоваться и другие структуры управления, такие как переключатели или шкалы.
На фиг. 7С представлена блок-схема последовательности операций платы управления в роботизированной хирургической системе по настоящему изобретению. С выхода электрохирургического генератора (не представлен) на силовой преобразователь 670 в коробке контроллера 600 подается напряжение. Силовой преобразователь 670 выдает постоянное напряжение 5 В и 3,3 В на роботизированный хирургический ручной блок через шнуры питания (не представлены), соединяющие ручной блок с коробкой контроллера 600. Коробка контроллера 600 так же соединена с электрохирургическим генератором через электрический шнур или шнуры питания (не представлено). Напряжение 3,3 В, подаваемое на ручной блок от силового преобразователя 670, используется для питания джойстика 740 и кнопки режима (кнопок) 750. Напряжение 5 В, подаваемое на ручной блок с выхода коробки управления 600, используется для питания электродвигателей и приводов электродвигателей вместе с экраном дисплея 760. Блок микроконтроллера 710 получает питание с выхода силового преобразователя 670, на вход которого поступают сигналы от кнопки режима 750 и джойстика 740, и управляет приводами электродвигателей и электродвигателями, одним или несколькими светодиодными индикаторами состояния 780 и обеспечивает связь с внешними устройствами 770.
Альтернативный вариант осуществления ручного блока, кожуха или оболочки 800 для роботизированной хирургической системы в соответствии с настоящим изобретением описан со ссылкой на фиг. 8A-8D. Термины «кожух», «оболочка», «корпус» используются в данном описании взаимозаменяемо. Ручной блок снабжен жестким внутренним корпусом 810, состоящим из двух частей 810а и 810b, которые можно защелкивать, соединять или иным образом прикреплять друг к другу, чтобы вмещать сборку электродвигателей 900 и другие элементы, такие как кнопка режима 830, кнопка блокировки 840, кнопка питания 850 и джойстик 890. Во внутреннем корпусе 810 выполнено множество отверстий, через которые выступают такие элементы, как кнопка режима 830, кнопка блокировки 840, кнопка питания 850 и джойстик 890, эти элементы доступны для пользователя и он может ими управлять. У джойстика 890 может быть шляпка 892. У других кнопок или элементов управления также могут быть такие крышки или накладки. Во внутреннем корпусе 810 дополнительно выполнено отверстие или окно для размещения экрана, который на фиг. 8А-8 представлен прикрепленным к сборке электродвигателей 900. Следует понимать, что в других вариантах осуществления настоящего изобретения экран может быть установлен во внутреннем корпусе 810 отдельно от сборки электродвигателей 900 и может подключаться к контроллеру в сборке электродвигателей (или в другом месте ручного блока) с помощью электропроводов. Внутренний корпус 810 дополнительно снабжен носовым колпачком 816 с отверстием для размещения манипулятора робота 1000. На фиг. 8А, каждая сторона 816а, 816b выполнена заодно с соответствующей стороной 810а, 810b корпуса. В альтернативных вариантах осуществления настоящего изобретения носовой колпачок не обязательно выполняется заодно с внутренним корпусом 810. Ручной блок дополнительно включает в свой состав внешний корпус 820, состоящий из передней части корпуса 820а и задней части 820b. Передняя часть корпуса 820а снабжена носиком, в котором выполнено отверстие под манипулятор робота 1000. Задняя часть 820 открывается или может отсоединяться от передней части 820а корпуса, чтобы обеспечить вставку внутреннего корпуса 910 (вместе со всем содержимым внутреннего корпуса 810) в переднюю часть внешнего корпуса 820а, а затем заднюю часть 820b можно закрыть или прикрепить к передней части, чтобы заключить внутренний корпус. Внешний корпус 820 может быть прозрачным, поэтому дисплей в пакете электродвигателей может быть виден через внешний корпус 820 или может иметь прозрачную часть или может иметь отверстие или окно, через которое можно видеть экран. Во внешнем корпусе 820 дополнительно выполнено множество отверстий, соответствующих отверстиям во внутреннем корпусе 810 для нижних органов управления и светодиодов. Кроме того, в состав ручного блока также входит разъем 860, входящий в отверстие в нижней части рукояти 814 внутреннего корпуса 810 под разъем питания от коробки управления 600 для подачи питания на ручной блок. Разъем 860 соединен со сборкой электродвигателей в корпусной части 812 внутреннего корпуса 810 с помощью провода/кабеля или проводов/кабелей (не представлены) внутри внутреннего корпуса 810. Ручной блок дополнительно снабжен триггером 920, соединенным со сборкой электродвигателей через звено или звенья 842 и проходящим снаружи как внутреннего корпуса 810, так и внешнего корпуса 820.
Как представлено на фиг. 9А, в сборке электродвигателей или корпусе 900 различные элементы опираются на раму 990. С каждого конца рамы 990 выполнена канавка под механический манипулятор. Множество накладок ползунков 905, 907, 908, 910 крепятся на раме с помощью ползунков 917, которые крепятся к раме 990 с помощью винтовых гаек 922. В каждой накладке ползунка выполнена канавка под механический манипулятор. Каждый из четырех шаговых электродвигателей 932, 934, 936, 938 снабжен приводным валом 932а, 934а, 936а, 938а и установлен на раме, например, с помощью винтов. Кольцо ползунка 903 (DOF3), 904 (DOF4), 906 (DOF5), 909 (DOF2) располагается рядом с накладкой ползунка 905, 907, 908, 910 для приема механического манипулятора. Около каждого конца рамы 990 рядом с канавкой помещается опорное кольцо 914. На раме 990 установлена и прикреплена к ней, например, с помощью винтов, крышка 902. На крышке 902 размещена печатная плата 901 с управляющей электроникой системы, и экран 980 электрически подключен к печатной плате 901, и физически крепится к печатной плате 901. Ролики или шкивы 962, 964, 966, 968 крепятся к соответствующим приводным валам 932а, 934а, 936а, 938а электродвигателей для приема ремней, приводящих ролики или шкивы 972, 974, 976, 978, установленные на валах 972а, 974а, 976а, 978а, которые перемещают исполнительные трубки в механическом манипуляторе. Сборка электродвигателей 900 также снабжена триггером 920, соединительным звеном 926 и рычажным механизмом 927 для ручной активации инструмента на дистальном конце механического манипулятора.
Со ссылкой на фиг. 10А-10С и фиг. 11-14 описан альтернативный вариант осуществления механического манипулятора по настоящему изобретению. В состав механического манипулятора 1000 входит множество исполнительных трубок 1010, 1020, 1030, 1040, 1050 и суставов или вертлюгов 1100, 1200, 1300, 1400, которые обеспечивают движение механического манипулятора. Как показано на фиг. 10А, такая конструкция обеспечивает пять степеней свободы. На фиг. 10С представлены исполнительные трубки и механизмы. Используется пять исполнительных трубок, по одной на каждую степень свободы: исполнительная труба 1010 для DOF1, исполнительная труба 1020 для DOF2, исполнительная труба 1030 для DOF5, исполнительная труба 1040 для DOF3 и исполнительная труба 1050 для DOF 4. Для каждой степени свободы ("DOF") предназначена одна исполнительная трубка и в большинстве случаев другие элементы, связанные с ней. DOF1 обеспечивает вращение на 360 градусов, реализуемое с помощью исполнительной трубки 1010. DOF2 обеспечивает изгиб сустава 1100 на 0-45° и реализуется с помощью исполнительной трубки 1020, трубки 1022 D-образного сечения, шарнирного соединения 1024 и исполнительного звена 1026. DOF3 обеспечивает вращение на 180°, реализуемое с помощью исполнительной трубки 1040, исполнительного стержня 1042, исполнительного звена 1044. DOF4 реализуется с помощью исполнительной трубки 1050, исполнительного звена 1052 и исполнительного звена 1054. DOF5 реализуется с помощью исполнительной трубки 1030, трубки 1032 D-образного сечения и исполнительного звена 1036.
На фиг. 11 представлен сборочный чертеж Сустава 2. Различные части Сустава 2 соединены друг с другом, например, с помощью штифтов 1146. Различные составные части Сустава 2 относятся к различным степеням свободы. Для DOF2 исполнительное звено 1156 соединяется с исполнительным звеном 1153, которое соединяется с исполнительным звеном 1145, которое соединяется с шарнирным соединением 1148. Для DOF3 исполнительное звено 1151 соединяется с исполнительным звеном 1143, которое соединяется с исполнительным звеном 1141, которое соединяется с исполнительным звеном 1133. Для DOF4 исполнительное звено 1150 соединяется с исполнительным звеном 1149, которое соединяется с исполнительным звеном 1140, которое соединяется с исполнительным звеном 1139, которое соединяется с исполнительным стержнем ИЗО. Для DOF5 исполнительное звено 1152 соединяется с исполнительным звеном 1144, которое соединяется с исполнительным звеном 1135, которое соединяется с исполнительной трубкой 1131.
На фиг. 12 показана конструкция микровертлюга 1200. Различают внутренний микровертлюг и наружный микровертлюг. В наружном микровертлюге наружный конец трубки 1228 соединяется с наружной трубкой 1222 с помощью шариков 1234, которые позволяют трубкам вращаться относительно друг друга. Наружная оболочка 1229 закрывает шарики 1234. Конец трубки 1221 соединяется с наружной трубкой 1222. Внутренний микровертлюг находится внутри наружного микровертлюга и включает внутреннюю трубку 1224, политетрафторэтиленовый подшипник 1226, нержавеющий шарик 1227, и конец внутренней трубки 1225. Конец внутренней трубки 1225 соединяется с внутренней трубкой 1224 с помощью шариков 1234, которые в свою очередь закрыты внутренней оболочкой 1223.
На фиг. 13 представлен сборочный чертеж Сустава 3, который относится к DOF3. В состав Сустава 3 входит наружная трубка 1342, шарики 1342, наружная оболочка шариков 1369, исполнительная трубка 1332, исполнительная трубка 1320, исполнительная трубка 1318, исполнительная кнопка 1319 и спиральный шарнир 1301.
На фиг. 14 представлен чертеж Суставов 4 и 5, которые относятся к DOF4 и DOF5. Конструкция для DOF4 включает в себя исполнительный стержень 1413, шарнирный сустав 1402, исполнительное звено 1412 и поворотный штифт 1411. Конструкция для DOF5 включает исполнительную трубку 1410, ползун 1414 штифт ползуна 1438, звенья роликовой тяги 1406, 1407, 1409, дистанционирующий элемент роликовой тяги 1408 и исполнительный стержень 1405. В состав захвата входят захватные руки 1403, 1404 и захватные штифты 1436, 1437.
Роботизированная система по настоящему изобретению представляет собой бескабельную роботизированную хирургическую систему. Система может использоваться с гибкими инструментами, такими как гибкое лапароскопическое приспособление, которое может включать в себя ножницы для резки и коагуляции, иглодержатель, граспер, диссектор ткани или любой другой инструмент. Специалист в данной области поймет, что система может использоваться в комбинации с любым минимально инвазивным инструментом, включая такие устройства, как гибкие и жесткие лапароскопы, торакоскопы, цистоскопы, бронхоскопы, эндоскопы и колоноскопы, но не ограничиваясь ими.
Хирург может использовать роботизированную систему на операционном столе подобно коммерческому жесткому лапароскопу. Роботизированная система также может применяться совместно с 3-D оптической системой.
Выше в целях иллюстрации и описания представлен предпочтительный вариант осуществления настоящего изобретения. Описание не предназначено для того, чтобы быть исчерпывающим или ограничивать изобретение точной раскрытой формой, в свете вышеприведенных идей возможны модификации и вариации, которые могут быть получены из практики применения изобретения. Был выбран и описан такой вариант осуществления, который позволяет объяснить принципы изобретения и его практическое применение, чтобы дать возможность специалисту в данной области техники использовать изобретение в различных вариантах осуществления, которые подходят для конкретного предполагаемого использования. Предполагается, что объем изобретения будет определяться прилагаемой формулой изобретения и ее эквивалентами. Каждый из вышеупомянутых документов во всей полноте включен в настоящий документ посредством ссылки.
Фигуры
Фиг. 7А
400 - механический манипулятор
712 - кинематическое управление
714 - управление электродвигателями
716 - OLED-управление
740 - джойстик
750 -кнопка режима
760 - OLED-дисплей
Фиг. 7В
220 - 5-я степень свободы: открыть/закрыть захват или ножницы
332 - электродвигатель (1)
334 - электродвигатель (2)
336 - электродвигатель (3)
338 - электродвигатель (4)
410 - стержень управления захватом
420 - стержень управления звеном захвата
430 - стержень управления вращением дистального манипулятора
440 - стержень управления звеном дистального манипулятора
450 - стержень управления длинным манипулятором
670 - источник питания
710 - блок контроллера
718-блок
1- я степень свободы: вращение длинного манипулятора в диапазоне от 0 до 360°
2- я степень свободы: перемещение дистального манипулятора в диапазоне от 0 до 45°
3- я степень свободы: вращение дистального манипулятора в диапазоне от 0 до 45°
4- я степень свободы: перемещение дистального кончика в диапазоне от 0 до 45°
Фиг. 7С
Output from generator - выход генератора
3.3V - 3,3В
5V-5B
332 - шаговый электродвигатель (1)
334 - шаговый электродвигатель (2)
336 - шаговый электродвигатель (3)
338 - шаговый электродвигатель (4)
670 - преобразователь питания
710 - блок микроконтроллера
732 - привод электродвигателя (1)
734 - привод электродвигателя (2)
736 - привод электродвигателя (3)
738 - привод электродвигателя (4)
740 - джойстик
750 - кнопки режима
760 - экран дисплея
770 - протоколы обмена данными с внешними устройствами
780 - индикатор состояния светодиодов
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕДИЦИНСКАЯ РОБОТИЗИРОВАННАЯ СИСТЕМА | 2007 |
|
RU2412799C2 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА ДЛЯ ВЫПОЛНЕНИЯ МИНИМАЛЬНЫХ ИНВАЗИВНЫХ ВМЕШАТЕЛЬСТВ | 2007 |
|
RU2412800C2 |
| КОНТРОЛЛЕР ЗАПЯСТЬЯ ДЛЯ ИСПОЛЬЗОВАНИЯ В КОНТРОЛЛЕРЕ ОПЕРАТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2718568C1 |
| Автономный мобильный модуль роботизированного хирургического инструмента | 2019 |
|
RU2715684C1 |
| МЕДИЦИНСКИЙ МАНИПУЛЯТОР | 2008 |
|
RU2445933C2 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА | 2018 |
|
RU2741469C1 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СТАНЦИЯ | 2014 |
|
RU2657958C2 |
| ОЦЕНКА УСИЛИЯ НА РОБОТОХИРУРГИЧЕСКОМ ИНСТРУМЕНТЕ | 2019 |
|
RU2721462C1 |










Изобретение относится к медицине, а именно к роботизированным хирургическим системам. В состав системы входит ручной блок, включающий жесткий кожух и сборку электродвигателей внутри кожуха. Кожух состоит из корпусной части и рукояти. Корпусная часть включает наконечник. Сборка электродвигателей содержит: раму, первую и вторую пары электродвигателей, приводной ролик, фрикционную передачу, кольцо фрикционной передачи, два приводных стержня, вторичный ролик, приводную ленту, два приводных кольца, управляющую электронику, механизм управления, механизм переключения режимов и разъем для подключения источника питания для подачи питания на управляющую электронику и электродвигатели. Каждый электродвигатель имеет корпус, прикрепленный к раме. Каждый электродвигатель из первой пары имеет приводной вал, выходящий из корпуса электродвигателя в первом направлении. Каждый электродвигатель из второй пары имеет приводной вал, выходящий из корпуса электродвигателя во втором направлении, противоположном первому направлению. Приводной ролик соединен с приводным валом каждого электродвигателя. В состав фрикционной передачи входит ролик, соединенный с приводным роликом посредством приводной ленты. Вторичный ролик связан с каждым из приводных стержней. Приводная лента соединяет каждый вторичный ролик с приводным роликом. Каждое приводное кольцо приводится одним из приводных стержней. Механизм управления соединен с управляющей электроникой и проходит через отверстие в кожухе. Механизм переключения режимов соединен с управляющей электроникой и проходит через отверстие в кожухе. Система также содержит механический манипулятор, соединенный с ручным блоком. Механический манипулятор имеет четыре степени свободы. Достигается уменьшение размеров роботизированной хирургической системы. 5 з.п. ф-лы, 60 ил.
1. Роботизированная хирургическая система, в состав которой входит: ручной блок (800), включающий в свой состав:
жесткий кожух (810), состоящий из корпусной части (812) и рукояти (814), причем упомянутая корпусная часть (812) включает в свой состав наконечник (816);
сборку электродвигателей (900) внутри упомянутого жесткого кожуха (810), причем сборка электродвигателей содержит:
раму (990);
по меньшей мере первую и вторую пары электродвигателей (932, 934, 936, 938), каждый из которых имеет корпус электродвигателя, прикрепленный к указанной раме (990), причем каждый электродвигатель из первой пары имеет приводной вал, выходящий из указанного корпуса указанного электродвигателя в первом направлении, и каждый электродвигатель из второй пары имеет приводной вал, выходящий из указанного корпуса указанного электродвигателя во втором направлении, противоположном первому направлению;
приводной ролик, соединенный с приводным валом (932а, 934а, 936а, 938а) каждого электродвигателя (932, 924, 926, 938);
фрикционную передачу (972b), в состав которой входит ролик (972), соединенный с приводным роликом (962) посредством приводной ленты;
кольцо фрикционной передачи (921), приводимое в действие упомянутой фрикционной передачей (972b);
по меньшей мере два приводных стержня (918), поддерживаемых упомянутой рамой (990);
вторичный ролик (974, 976, 978), связанный с каждым из приводных стержней (918);
приводную ленту, соединяющую каждый вторичный ролик с приводным роликом (934а, 936а, 938а);
по меньшей мере два приводных кольца (903, 904, 909), причем каждое приводное кольцо приводится одним из приводных стержней (918); а также
управляющую электронику (901), электрически подключенную к приводным электродвигателям (932, 934, 936, 938);
механизм управления (810), соединенный с упомянутой управляющей электроникой и проходящий через отверстие в упомянутом жестком кожухе (810);
механизм переключения режимов (830), соединенный с упомянутой управляющей электроникой и проходящий через отверстие в упомянутом жестком кожухе (810); а также
разъем для подключения источника питания для подачи питания на упомянутую управляющую электронику и упомянутые электродвигатели; а также
механический манипулятор (1000), соединенный с упомянутым ручным блоком (900), причем упомянутый механический манипулятор имеет четыре степени свободы, причем каждая из упомянутых четырех степеней свободы управляется одним из упомянутого множества электродвигателей.
2. Роботизированная хирургическая система по п. 1, отличающаяся тем, что упомянутый ручной блок дополнительно содержит механический триггер для управления степенью свободы упомянутого механического манипулятора.
3. Роботизированная хирургическая система по п. 1, отличающаяся тем, что упомянутый ручной блок дополнительно включает в свой состав экран дисплея (980), соединенный с упомянутой управляющей электроникой (901), для отображения оперативной информации упомянутой роботизированной хирургической системы.
4. Роботизированная хирургическая система по п. 1, в состав которой также входит одноразовая наружная оболочка (820), охватывающая упомянутый кожух (810).
5. Роботизированная хирургическая система по п. 4, отличающаяся тем, что упомянутая одноразовая наружная оболочка (820) выполнена из гибкого прозрачного материала.
6. Роботизированная хирургическая система по п. 1, отличающаяся тем, что упомянутый механический манипулятор включает в свой состав:
по меньшей мере три исполнительные трубки (1010, 1020, 1030, 1040, 1050), причем каждая исполнительная трубка управляет одной из упомянутых степеней свободы упомянутого механического манипулятора, причем каждое приводное кольцо (903, 904, 909) приводит одну из упомянутых исполнительных трубок с целью задания упомянутому механическому манипулятору упомянутой степени свободы, контролируемой упомянутой исполнительной трубкой.
| US 20150080907 A1, 19.03.2015 | |||
| ХИРУРГИЧЕСКИЙ СШИВАТЕЛЬ ДЛЯ ЭНДОСКОПИЧЕСКИХ ОПЕРАЦИЙ | 2009 |
|
RU2437622C2 |
| US 2014246471 A1, 04.09.2014 | |||
| US 2016095585 A1, 07.04.2016 | |||
| ПРИВОД ДЛЯ ИНСТРУМЕНТА ЭНДОСКОПИЧЕСКОГО ХИРУРГИЧЕСКОГО АППАРАТА | 2014 |
|
RU2570939C1 |
| US 2008308607 A1, 18.12.2008. | |||

