Изобретение относится к способам навигации автономных необитаемых подводных аппаратов (АНПА), а конкретно к способам обеспечения безопасности их плавания.
Одной из задач, решаемых системой управления АНПА в интересах обеспечения безопасности плавания, является обход обнаруженных неподвижных подводных препятствий (НПП), чтобы исключить столкновение с ними [1].
В качестве НПП могут выступать [2-5]:
- при плавании АНПА вдоль береговой черты - берег;
- при плавании в непосредственной близости ото дна - подводные горы и возвышенности;
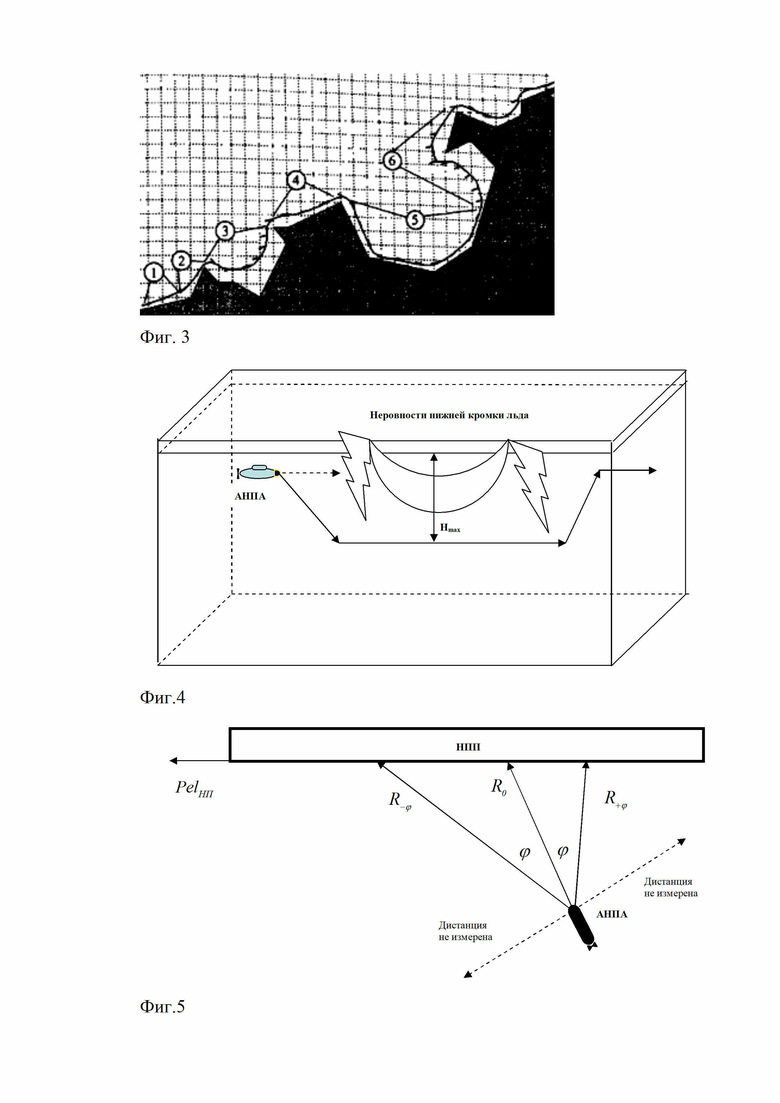
- при плавании подо льдом - неровности нижней кромки льда;
- при плавании в высоких широтах - айсберги;
- при плавании в океанах - мусорные острова.
Вопросу безопасности плавания АНПА посвящено значительное число публикаций в отечественной и зарубежной литературе [1-18].
Обеспечение безопасности плавания АНПА достигается путём совместного решения следующих задач:
- выбора наиболее безопасного маршрута АНПА для достижения целевой точки, что подразумевает прокладку маршрута вне районов интенсивного судоходства и рыболовства, добычи полезных ископаемых на морском шельфе, ледохода, мусорных островов [2-5];
- выбора глубины погружения АНПА, минимизирующей вероятность столкновения с препятствием;
- своевременного обнаружения препятствия [1, 7, 8];
- рационального маневрирования АНПА для обхода неподвижного препятствия [1, 8-13].
Анализ известных публикаций показал, что в них данная задача рассматривается применительно к лёгким АНПА, оснащённым высокочастотными вперёдсмотрящими (зачастую однолучевыми) гидролокаторами с узкими секторами обзора и с дальностью обнаружения препятствий до нескольких сотен метров. С такими гидролокаторами обход НПП происходит путём огибания на небольшом расстоянии каждой неровности препятствия. И основной проблемой, решаемой системой управления, является выбор скорости АНПА, при которой радиус циркуляции АНПА позволит безопасно совершить манёвр огибания очередной неровности препятствия.
В последние годы большой интерес вызывают так называемые тяжёлые АНПА, габариты которых позволяют оборудовать их техническими средствами, позволяющими решать поставленные задачи на большом удалении от базы, в частности мощной энергетикой, развитыми средствами навигации и освещения подводной обстановки [19, 20]. Учитывая широкий сектор обзора пространства и большую дальность обнаружения препятствий гидролокаторов тяжёлых АНПА, стратегия обеспечения их безопасности состоит в заблаговременном обнаружении препятствия и обхода его за минимальное время.
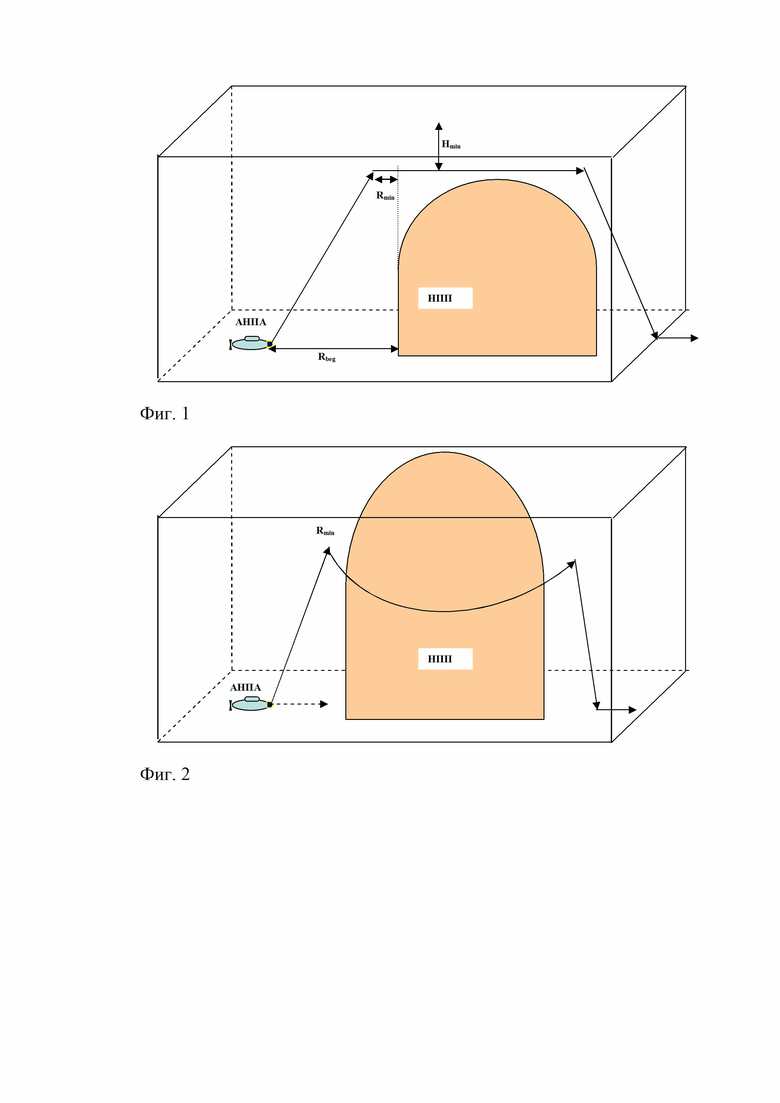
В качестве прототипа выберем способ обхода НПП, описанный в [1]. Сущность способа-прототипа состоит в следующем. АНПА движется под водой с включённым вперёдсмотрящим гидролокатором. При обнаружении НПП АНПА делает попытку обойти НПП сверху (фиг.1). Для этого АНПА всплывает на минимально допустимую глубину 
Если после всплытия АНПА НПП продолжает наблюдаться, АНПА начинает обход НПП по горизонтали в выбранном направлении (фиг.2, 3). Для этого, исходя из дистанции до ближайшей точки НПП, АНПА уменьшает собственную скорость до такой, которая обеспечивает выполнение отворота АНПА от НПП, не приближаясь к НПП на расстояние, меньшее минимально допустимого. Отвернув от ближайшей точки НПП, АНПА поворачивает на прежний курс (т.е. на курс, которым АНПА двигался до обнаружения препятствия). Если в процессе поворота АНПА снова обнаруживает НПП, описанная процедура повторяется. И так осуществляется до тех пор, пока после поворота на прежний курс НПП не будет наблюдаться.
Недостатком способа-прототипа является значительное время, затрачиваемое на обход НПП, обусловленное огибанием на малой скорости каждого изгиба НПП (фиг.3).
Решаемая техническая проблема – повышение качества управления АНПА.
Технический результат – сокращение времени обхода НПП.
Указанный технический результат достигается использованием преимуществ по ширине сектора обзора пространства (более 180° в горизонтальной плоскости) и дальности обнаружения НПП (более 1 км), обеспечиваемых вперёдсмотрящими гидролокаторами, устанавливаемыми на тяжёлых АНПА.
При этом отметим, что все действия АНПА осуществляются по команде её системы управления, а эти команды, в свою очередь, являются следствием решений, принятых системой управления. Но для краткости изложения упоминание роли системы управления будем опускать.
Сущность заявляемого способа состоит в том, что перед обходом НПП по горизонтали вперёдсмотрящий гидролокатор АНПА замеряет дистанцию до НПП на нескольких курсовых углах в интервале -90°…+90°, с использованием результатов этих замеров и с учётом собственного курса вычисляет пеленг прямой линии, параллельной лицевой части НПП, после чего ложится на курс, равный этому пеленгу либо обратному ему. В процессе движения выбранным курсом гидролокатор АНПА периодически замеряет дистанцию до НПП на тех же курсовых углах, на основании этих замеров уточняет пеленг прямой линии, параллельной лицевой части НПП, и в соответствии с уточнённым пеленгом, а также с учётом дистанции до НПП, корректирует свой курс. Когда гидроакустический контакт с НПП на всех курсовых углах в интервале -90°…+90° будет потерян, АНПА поворачивает на генеральный курс, которым он двигался до обнаружения НПП.
На фиг.1-9, иллюстрирующих положение и движение АНПА относительно НПП, приняты следующие обозначения:
Rmin – минимально допустимая дистанция приближения к НПП в процессе всплытия;
Hmin – минимально допустимая глубина всплытия АНПА при обходе НПП по вертикали путём всплытия;
Hmax – максимально допустимая глубина погружения АНПА при обходе НПП по вертикали путём погружения;
Rbeg – минимальная дистанция до НПП, с которой надо начинать всплытие/погружение для обхода препятствия по вертикали, рассчитываемая по формуле:

Hg – глубина АНПА перед всплытием;
Vg – скорость горизонтального движения АНПА;



PelНП – пеленг линии, проведённой вдоль лицевой стороны НПП, вычисляемый по формуле:









Техническое осуществление заявляемого способа обхода НПП реализуется в следующей последовательности действий.
1) АНПА движется генеральными курсом 






2) Если при всплытии/погружении гидроакустический контакт с НПП будет потерян (фиг.1 и фиг.4), АНПА начинает горизонтальное движение, не изменяя курса. Если в течение рекомендованного интервала времени 

3) Если маневрирование по глубине не привело к желаемому результату (например, в случае, когда препятствие оказалось береговой чертой), то, находясь на минимальной глубине 



4) Определив пространственную ориентацию НПП, АНПА выбирает направление движения вдоль линии 

5) Учитывая, что на практике лицевая сторона препятствия будет отличаться от плоскости, причём, как правило, весьма существенно, АНПА во время движения вдоль препятствия по данным гидролокатора периодически уточняет ориентацию препятствия. Достигается это путём вычисления по формуле (2) последовательности значений 

где 

α - коэффициент сглаживания. В зависимости от периодичности измерения 
6) Движение АНПА вдоль НПП корректируется исходя из двух условий:
- курс АНПА должен быть близок к текущему значению
- расстояние АНПА от НПП не должно быть меньше минимально допустимого 
7) Движение вдоль НПП должно осуществляться до тех пор, пока на всех пяти курсовых углах эхосигналы от НПП будут отсутствовать (фиг.8). После этого АНПА курсом 

8) Если после поворота препятствие будет вновь обнаружено (наиболее вероятно по тому борту, в сторону которого был осуществлён поворот), действия, описанные на шагах 5 - 7 последовательности действий, повторяются. И так до тех пор, пока акустический контакт с препятствием не будет окончательно потерян.
Для подтверждения эффективности заявляемого способа было проведено моделирование, условия и результаты которого показаны на фиг.10. Чёрным цветом на фиг.10 изображено НПП, имитирующее берег, изрезанный фиордами. Синей линией показан маршрут движения АНПА в соответствии со способом-прототипом. Красной линией изображён маршрут в соответствии с заявляемым способом. Моделирование показало, что при движении АНПА в соответствии с заявляемым способом (скорость АНПА 4 уз, дистанция обнаружения НПП 2 км) время обхода НПП по сравнению со способом-прототипом (скорость АНПА 1 уз, дистанция обнаружения НПП 0,2 км) сокращается в 4,7 раза, что обусловлено наличием прогноза ориентации лицевой части препятствия, который позволяет, во-первых, двигаться по более плавной траектории и, во-вторых, двигаться с относительно большой скоростью, в то время как при движении в соответствии со способом-прототипом АНПА, не имея прогноза и обходя каждую выпуклость препятствия, движется по петляющей траектории и при приближении к препятствию вынужден уменьшать скорость до 0,5 уз, чтобы выполнить поворот, не столкнувшись с препятствием.
Таким образом, заявленный технический результат – сокращение времени обхода НПП – можно считать достигнутым.
Источники информации
1. Подводные робототехнические комплексы: системы, технологии, применение /А.В. Инзарцев, Л.В. Киселев, В.В. Костенко, Ю.В. Матвиенко, А.М. Павин, А.Ф. Щербатюк [отв. ред. Л.В. Киселев]. Владивосток: Дальнаука. 2018. 368 с.
2. Наумов Л.А., Илларионов Г.Ю., Лаптев К.З., Бабак А.В. К вопросу о принципах планирования и особенностях формирования глобальных маршрутов автономных подводных роботов // Известия ТулГУ. Технические науки. Вып.11: в 2 ч. Ч. 2. Тула: Изд-во ТулГУ. 2015. 219 с.
3. Лаптев К.З., Илларионов Г.Ю. Что может помешать подводному мореходству автономного необитаемого подводного аппарата: // Сборник материалов XIII Всероссийской научно-практической конференции «Перспективные системы и задачи управления». Ростов-на-Дону: Южный федеральный университет. 2017. С. 138–146.
4. Почему все-таки подводные лодки попадают в рыболовные сети? // Интернет-ресурс https://inosmi.ru/world/20050811/221492.html. Дата обращения 06.02.2019.
5. Инзарцев А.В., Багницкий А.В. Планирование и реализация траекторий движения автономного подводного робота при выполнении мониторинга в акваториях различных типов // ПИР. 2016. №2 (22). С. 25-35.
6. Багницкий А.В., Инзарцев А.В. Автоматизация подготовки миссии для автономного необитаемого подводного аппарата в задачах обследования акваторий // Подводные исследования и робототехника. 2010. № 2(10). С. 17–24.
7. Пашкевич И.В., Гриненков А.В., Конюхов Г.В. и др. Особенности реализации аварийной подсистемы АНПА при использовании мультиагентной технологии в его системе управления // Труды Всероссийской конференции "Прикладные технологии гидроакустики и гидрофизики". Санкт-Петербург. 2020. С. 276-285.
8. Инзарцев А.В., Багницкий А.В. Алгоритмы обхода локальных донных объектов для автономного подводного робота // 6-я Всерос. науч.-техн. конф. «Технические проблемы освоения мирового океана» (ТПОМО-6). Владивосток. 2015. С. 450–454.
9. Тусеева И.Б., Тусеева Д.Б., Ким Юн-Ги. Алгоритм динамического окна для навигации автономных подводных аппаратов // Искусственный интеллект и принятие решений. 2013. №3. С. 67-77.
10. Galarza, C., Masmitja, I., Prat, J., Gomariz, S., Design of obstacle detection and avoidance system for Guanay II AUV, Appl. Sci., 2020, vol. 10, pp. 32–37.
11. Lin, C., Wang, H., Yuan, J., Yu, D., Li, C., An improved recurrent neural network for unmanned underwater vehicle online obstacle avoidance // IEEE J. Ocean Eng. 2019. Vol. 44. P. 120–133.
12. Fox D., Burgardt W., Thrun S. The Dynamic Window Approach to Collision Avoidance // IEEE Robotics and Automation Magazine. 1995.
13. Sami A., Ayman M.M., Brisha M. Analysis and Simulation of 3D Trajectory with Obstacle Avoidance of an Autonomous Underwater Vehicle for Optimum Performance // Int. J. of Computer Science and Network Security.2012. Vol. 12, No. 3. P.43-50.
14. Galarza C., Masmitja I., González J., Prat J., Gomariz S., Del Rio J. Design obstacle detection system for AUV Guanay II.A // Sixth International Workshop on Marine Technology. Cartagena. 2015. P. 15-18.
15. Hromatka M. A Fuzzy Logic Approach to Collision Avoidance in Smart UAVs. Honors Theses. // 2013. Paper 13. URL: http://digitalcommons.csbsju.edu/honors_theses/13.
16. Evans J., Patrón P., Smith B., Lane D.M. Design and evaluation of a reactive and deliberative collision avoidance and escape architecture for autonomous robots // Autonomous Robots. 2008. V.24, No 3. P. 247-266.
17. Chiew S.T. A collision avoidance system for autonomous underwater vehicles. Honors Theses. // University of Plymouth. 2006. URL: http://hdl.handle.net/10026.1/2258.
18. Liu S., Wei Y., Gao Y. 3D path planning for AUV using fuzzy logic // Computer Science and Information Processing (CSIP). 2012. URL: http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=6308925.
19. Илларионов Г.Ю., Сиденко К.С., Бочаров Л.Ю. Угроза из глубины: XXI век.- Хабаровск: КГУП "Хабаровская краевая типография", 2011, 304 с.
20. Аполлонов Е.М., Бачурин А.А., Горохов А.И., Пономарев Л.О. О возможности и необходимости создания сверхбольшого необитаемого подводного аппарата // Сборник материалов XIII Всероссийской научно-практической конференции «Перспективные системы и задачи управления». Ростов-на-Дону – Таганрог, ЮФУ. 2018. С.34-42.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2011 |
|
RU2460043C1 |
| СПОСОБ НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2013 |
|
RU2563332C2 |
| СПОСОБ ЗАЩИТЫ ОХРАНЯЕМОЙ АКВАТОРИИ ОТ ПОДВОДНЫХ ДИВЕРСАНТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2269449C1 |
| Способ позиционирования подводных аппаратов при плавании по постоянному маршруту | 2022 |
|
RU2785215C1 |
| АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ ДЛЯ ОЧИСТКИ МОРСКИХ РАЙОНОВ ОТ ПЛАВАЮЩИХ ПОДВОДНЫХ ОБЪЕКТОВ | 2020 |
|
RU2753658C1 |
| АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ ПЕРЕДАЧИ ИНФОРМАЦИИ О СОСТОЯНИИ ПОДВОДНОЙ ЛОДКИ | 2021 |
|
RU2769806C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| СПОСОБ ВЫСОКОТОЧНОГО КООРДИНИРОВАНИЯ ПОДВОДНОГО КОМПЛЕКСА В УСЛОВИЯХ ПОДЛЕДНОГО ПЛАВАНИЯ | 2013 |
|
RU2555479C2 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ НАЧАЛЬНЫХ КООРДИНАТ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2016 |
|
RU2629916C1 |
| СПОСОБ ПРОВЕРКИ ТОЧНОСТИ НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2022 |
|
RU2789714C1 |


Использование: изобретение относится к способам навигации автономных необитаемых подводных аппаратов (АНПА), а конкретно к способам обеспечения безопасности их плавания. Сущность: технический результат достигается использованием возможностей гидролокаторов, устанавливаемых на тяжёлых АНПА, по ширине сектора обзора пространства (более 180° в горизонтальной плоскости) и дальности обнаружения НПП (более 1 км). Сущность изобретения состоит в определении по данным гидролокатора сглаженной прямой, проведённой вдоль лицевой части обнаруженного НПП, и движении АНПА параллельно этой линии. Технический результат: сокращение времени обхода неподвижных подводных препятствий (НПП). 10 ил.
Способ обхода автономным необитаемым подводным аппаратом (АНПА) неподвижного подводного препятствия (НПП), включающий обнаружение НПП гидролокатором АНПА, при плавании в районе, свободном ото льда и мусорных островов, АНПА всплывает на минимально допустимую глубину для обхода НПП по вертикали, обход НПП по горизонтали в случае невозможности обхода НПП по вертикали, отличающийся тем, что при плавании подо льдом либо в районах возможного нахождения мусорных островов АНПА погружается на максимально допустимую глубину, при этом перед погружением с учетом своей горизонтальной скорости, скорости погружения и разности глубин рассчитывает минимальное расстояние до препятствия, обеспечивающее приближение к препятствию в процессе погружения на расстояние, превышающее минимально допустимое, при этом перед всплытием/погружением АНПА и перед обходом НПП по горизонтали гидролокатор АНПА замеряет дистанцию до НПП на нескольких курсовых углах в интервале -90°…+90°, с использованием результатов этих замеров и с учетом собственного курса система управления АНПА вычисляет пеленг прямой линии, параллельной лицевой части НПП, после чего дает команду лечь на курс, равный этому пеленгу либо обратному ему, в процессе движения выбранным курсом гидролокатор АНПА периодически замеряет дистанцию до НПП на тех же курсовых углах, а система управления АНПА с использованием последовательности замеров уточняет пеленг прямой линии, параллельной лицевой части НПП, и в соответствии с уточненным пеленгом, а также дистанции до НПП, корректирует курс АНПА, при отсутствии гидроакустического контакта с НПП на всех курсовых углах в интервале -90°…+90°, АНПА поворачивает на курс, которым он двигался до обнаружения НПП.
| Быкова В.С., Машошин А.И., Пашкевич И.В | |||
| Алгоритм обеспечения безопасности плавания автономного необитаемого подводного аппарата // Гироскопия и навигация | |||
| Солесос | 1922 |
|
SU29A1 |
| С | |||
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |
| пво | |||
| СПОСОБ ВЫСОКОТОЧНОГО КООРДИНИРОВАНИЯ ПОДВОДНОГО КОМПЛЕКСА В УСЛОВИЯХ ПОДЛЕДНОГО ПЛАВАНИЯ | 2013 |
|
RU2555479C2 |
| СПОСОБ НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2013 |
|
RU2563332C2 |
| US 8830793 B2, 09.09.2014 | |||
| CN 102231082 A, 02.11.2011 | |||
| CN 109597417 A, 09.04.2019. | |||

