Изобретение относится к машиностроению, а конкретно к навесному оборудованию для тракторов класса 1,5…3 кН, и может быть использовано для погрузки и разгрузки, а также для перевозки и укладки контейнеров и пакетированных грузов.
Известен погрузчик навесной фронтальный, состоящий из базового трактора и погрузочного оборудования, содержащего стрелу с гидроцилиндром подъема, погрузочный ковш, прикрепленный шарнирно к стреле и имеющий силовой гидроцилиндр, отличающийся тем, что погрузочное оборудование снабжено порталом, установленным на заднюю полураму базового трактора, и следящим устройством, состоящим из двуплечевого рычага, установленного на кронштейне стрелы и связанного одним концом с силовым гидроцилиндром, а другим - через тягу шарнирно с погрузочным ковшом (Полезная модель РФ № 56110, опубл. 2006).
Известно навесное оборудование погрузчика, содержащее ковш, гидроцилиндры подъема оборудования и поворота ковша, стрелу, выполненную в виде двух подъемных рычагов, соединяемых размещенной между рычагами поперечной распоркой с двумя парами проушин для шарнирного крепления коромысел, плечи каждого из которых шарнирно соединены через тягу с ковшом и через гидроцилиндр поворота ковша - с рамой погрузчика, отличающееся тем, что поперечная распорка снабжена расположенными с ее торцев охватывающими втулками, жестко соединенными с подъемными рычагами и поперечной распоркой, проушины для шарнирного крепления коромысел выполнены охватывающими поперечную распорку, по крайней мере одна из проушин каждой пары, расположенная со стороны подъемного рычага, надета на втулку и жестко соединена с ней (Полезная модель РФ № 1866, опубл. 1996).
К недостаткам известных технических решений следует отнести недостаточные функциональные возможности рабочего органы навесного оборудования погрузчика.
Технический результат - сокращение времени монтажа и демонтажа погрузчика на навесную систему трактора, широкие возможности управления положением вильчатого захвата в вертикальной плоскости.
Указанный технический результат достигается навесным вилочным погрузчиком, содержащий рабочий орган, гидроцилиндр подъема, гидроцилиндр поворота рабочего органа, согласно изобретению дополнительно содержит основание и раму, выполненные в виде треугольной фермы и расположенные параллельно друг другу, верхнюю поперечину и две нижних поперечины одинаковой длины, рабочий орган представлен в виде вильчатого захвата, при этом к раме в двух нижних вершинах треугольной фермы шарнирно крепиться нижняя часть вильчатого захвата, а в верхней вершине треугольной фермы жестко крепиться корпусом гидроцилиндр поворота вильчатого захвата, шток которого шарнирно соединен с верхней частью вильчатого захвата, при этом основание с передней стороны шарнирно соединяется в трех вершинах треугольной фермы с задней навеской трактора, работающей от силового гидроцилиндра гидросистемы трактора, а с задней стороны основание в верхней вершине шарнирно соединяется с одним концом верхней поперечины и двумя нижними вершинами шарнирно соединяется с одной стороны концами двух нижних поперечин, при этом гидроцилиндр подъема крепится корпусом шарнирно с задней стороны к основанию по центру между двумя нижними вершинами треугольной фермы основания, а шток гидроцилиндра подъема шарнирно соединяется в одной точке с вторым концом верхней поперечины и с верхней вершиной рамы, при этом рама нижними вершинами шарнирно соединяется с другой стороны концами двух нижних поперечин, при этом основание, верхняя поперечина, рама и две нижних поперечины в сборе представляют форму пространственного параллелограммного механизма, диагональю которого является гидроцилиндр подъема.
Изобретение поясняется чертежом.
На фигуре изображен общий вид навесного вилочного погрузчика с возможностью его установки на транспортное средство.
Навесной вилочный погрузчик состоит из рабочего органа 1 в виде вильчатого захвата 1, гидроцилиндра подъема 2, гидроцилиндра поворота 3 рабочего органа, основания 4 и рамы 5, верхней поперечины 6 и двух нижних поперечин 7 и 8. Погрузчик представлен в виде пространственного параллелограммного механизма, ребрами которого являются верхняя поперечина 6 и две нижних поперечины 7 и 8. Основание 4 и рама 5 выполнены в виде треугольной фермы и расположены параллельно относительно друг друга в вертикальной плоскости. Верхние вершины основания 4 и рамы 5 соединяются между собой верхней поперечиной 6 с помощью шарниров вращения. Нижние вершины основания 4 и рамы 5 соединяются между собой двумя нижними поперечинами 7 и 8 также с помощью шарниров вращения. Диагональю пространственного параллелограммного механизма является гидроцилиндр подъема 2, корпус которого располагается по центру между двумя нижними вершинами основания 4 и крепится посредством вращающего шарнира, шток гидроцилиндр подъема 2 соединяется с верхней поперечиной 6 и с верхней вершиной рамы 5 шарнирно в одной точке. К раме 5 в верхней вершине шарнирно монтируется корпусом гидроцилиндр поворота 3 рабочего органа. Спереди пространственного параллелограммного механизма устанавливается вильчатый захват 1 и соединяется с помощью шарниров вращения в верхней части со штоком гидроцилиндра поворота 3 рабочего органа, а в нижней части с двумя вершинами рамы 5. Пространственный параллелограммный механизм крепится посредством трехточечной схемы к верхней 9 и нижним тягам 10 стандартной навесной системы агрегатирующего трактора. Подъем и опускание навесной системы выполняется с помощью силового гидроцилиндра 11 трактора.
Работа навесного вилочного погрузчика осуществляется следующим образом.
При изменении длины - втягивание или выдвижение штока силового гидроцилиндра 11 гидросистемы осуществляется подъем и опускание задней навесной рычажной системы трактора, которая увлекает за собой пространственный параллелограммный механизм, соединенный вместе с вильчатым захватом 1 и тем самым перемещает груз в вертикальной плоскости. При изменении длины гидроцилиндра поворота 3 рабочего органа происходит выравнивание груза в горизонтальной плоскости. Выдвижение штока гидроцилиндра поворота 3 рабочего органа позволяет легко и быстро перемещаться грузу по направляющим вилам вильчатого захвата, таким образом ускоряется процесс разгрузки, втягивание штока гидроцилиндра поворота 3 рабочего органа предотвращает соскальзывание и выпадение груза с вил во время движения погрузочного агрегата и особенно полезно при движении погрузочного агрегата с грузом по наклонной плоскости. Выдвижение штока гидроцилиндра подъема 2 способствует дополнительному вертикальному перемещению груза, высота подъема которого будет зависеть от конфигурации и размеров пространственного параллелограммного механизма, помимо этого гидроцилиндр подъема 2 придает жесткость пространственному параллелограммному механизму. Гидроцилиндра подъема 2 и гидроцилиндра поворота 3 рабочего органа могут управляться от базовой гидросистемы трактора.
Навесной вилочный погрузчик имеет ряд преимуществ - это малая металлоемкость, быстрота монтажа и демонтажа погрузчика на навесную систему трактора, широкие возможности управления положением вильчатого захвата в вертикальной плоскости. Все перечисленные выше достоинства навесного вилочного погрузчика делают погрузочный агрегат малогабаритным, высокоманевренным и эффективным.
| название | год | авторы | номер документа |
|---|---|---|---|
| Навесной вилочный погрузчик | 2021 |
|
RU2764788C1 |
| НАВЕСНОЙ МАНИПУЛЯТОР С ВИЛЬЧАТЫМ ЗАХВАТОМ | 2021 |
|
RU2760476C1 |
| Робот-манипулятор | 2018 |
|
RU2700304C1 |
| Манипулятор-трипод параллельно-последовательной структуры | 2016 |
|
RU2616493C1 |
| Погрузочно-транспортный агрегат | 2022 |
|
RU2776189C1 |
| Кран-манипулятор | 2024 |
|
RU2823660C1 |
| Манипулятор-трипод промышленного назначения | 2017 |
|
RU2651781C1 |
| Навесное грузозахватное оборудование к погрузчику | 1975 |
|
SU555046A1 |
| Фронтальный погрузчик с расширенной рабочей зоной | 2022 |
|
RU2783604C1 |
| Робот-погрузчик сеток с овощами | 2019 |
|
RU2722747C1 |

Изобретение относится к области сельскохозяйственного машиностроения. Навесной вилочный погрузчик содержит рабочий орган (1), гидроцилиндр подъема (2), гидроцилиндр поворота (3) рабочего органа. Устройство дополнительно содержит основание (4) и раму (5), выполненные в виде треугольной фермы и расположенные параллельно друг другу, верхнюю поперечину (6) и две нижних поперечины (7 и 8) одинаковой длины. Рабочий орган (1) представлен в виде вильчатого захвата. К раме (5) в двух нижних вершинах треугольной фермы шарнирно крепится нижняя часть вильчатого захвата, а в верхней вершине треугольной фермы жестко крепится корпусом гидроцилиндр поворота (3) вильчатого захвата, шток которого шарнирно соединен с верхней частью вильчатого захвата. Основание (4) с передней стороны шарнирно соединяется в трех вершинах треугольной фермы с задней навеской трактора, работающей от силового гидроцилиндра (11) гидросистемы трактора, а с задней стороны основание (4) в верхней вершине шарнирно соединяется с одним концом верхней поперечины (6) и двумя нижними вершинами шарнирно соединяется с одной стороны концами двух нижних поперечин (7 и 8). Гидроцилиндр подъема (2) крепится корпусом шарнирно с задней стороны к основанию (4) по центру между двумя нижними вершинами треугольной фермы основания. Шток гидроцилиндра подъема (2) шарнирно соединяется в одной точке со вторым концом верхней поперечины (6) и с верхней вершиной рамы (5). Рама нижними вершинами шарнирно соединяется с другой стороны концами двух нижних поперечин (7 и 8). Основание (4), верхняя поперечина (6), рама (5) и две нижних поперечины (7 и 8) в сборе представляют форму пространственного параллелограммного механизма, диагональю которого является гидроцилиндр подъема (2). Обеспечиваются сокращение времени монтажа и демонтажа погрузчика на навесную систему трактора, широкие возможности управления положением вильчатого захвата в вертикальной плоскости. 1 ил.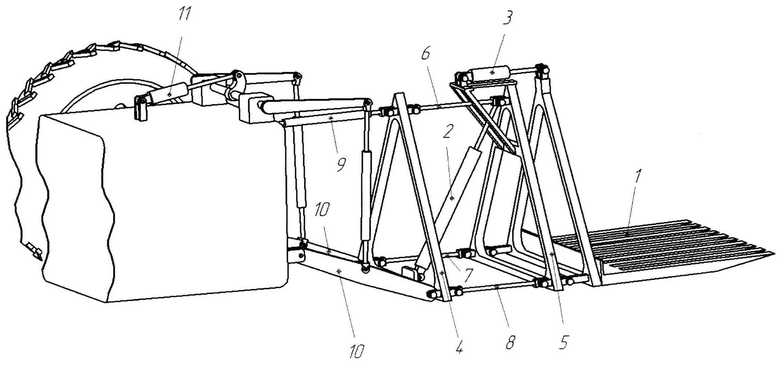
Навесной вилочный погрузчик, содержащий рабочий орган, гидроцилиндр подъема, гидроцилиндр поворота рабочего органа, отличающийся тем, что дополнительно содержит основание и раму, выполненные в виде треугольной фермы и расположенные параллельно друг другу, верхнюю поперечину и две нижних поперечины одинаковой длины, рабочий орган представлен в виде вильчатого захвата, при этом к раме в двух нижних вершинах треугольной фермы шарнирно крепится нижняя часть вильчатого захвата, а в верхней вершине треугольной фермы жестко крепится корпусом гидроцилиндр поворота вильчатого захвата, шток которого шарнирно соединен с верхней частью вильчатого захвата, при этом основание с передней стороны шарнирно соединяется в трех вершинах треугольной фермы с задней навеской трактора, работающей от силового гидроцилиндра гидросистемы трактора, а с задней стороны основание в верхней вершине шарнирно соединяется с одним концом верхней поперечины и двумя нижними вершинами шарнирно соединяется с одной стороны концами двух нижних поперечин, при этом гидроцилиндр подъема крепится корпусом шарнирно с задней стороны к основанию по центру между двумя нижними вершинами треугольной фермы основания, а шток гидроцилиндра подъема шарнирно соединяется в одной точке со вторым концом верхней поперечины и с верхней вершиной рамы, при этом рама нижними вершинами шарнирно соединяется с другой стороны концами двух нижних поперечин, при этом основание, верхняя поперечина, рама и две нижних поперечины в сборе представляют форму пространственного параллелограммного механизма, диагональю которого является гидроцилиндр подъема.
| Погрузчик | 1973 |
|
SU506345A1 |
| US 4911596 A, 27.03.1990 | |||
| FR 1246508 A, 18.11.1960 | |||
| ПРОИЗВОДНЫЕ ХИНО-4,4'-ПЕНТА(ГЕКСА)КАРБОЦИАНИНОВ В КАЧЕСТВЕ СПЕКТРАЛЬНЫХ СЕНСИБИЛИЗАТОРОВ, ОСУЩЕСТВЛЯЮЩИХ БРОМЙОДСЕРЕБРЯНЫЕ ЭМУЛЬСИИ К ДАЛЕКОМУ ИК-ДИАПАЗОНУ СПЕКТРА | 1987 |
|
SU1482150A1 |

