Изобретение относится к грузоподъемной технике, в частности к оборудованию с ограниченной грузоподъемностью для проведения погрузочно-разгрузочных работ преимущественно контейнерных грузов и может быть использовано в качестве тракторного погрузчика.
Известно навесное грузозахватное оборудование к погрузчику, содержащее основание, несущее на себе грузозахватную стрелу, приводимую в действие силовыми гидроцилиндрами, и гидросистему для управления цилиндрами, при этом с целью сокращения монтажа и демонтажа, упрощения конструкции грузозахватного оборудования, основание выполнено в виде плоской треугольной рамы со съемными балками, несущими опорные башмаки, а на углах рамы установлены шарнирные узлы, один из которых соединен с грузозахватной стрелой, а два других - с силовыми гидроцилиндрами, причем противоположные концы цилиндров соединены между собой и со стрелой (патент SU №555046 А1, опубл. 1977).
Технический недостаток данного навесного грузозахватного оборудования к погрузчику: недостаточные функциональные возможности грузозахватного органа.
Технический результат - обеспечение жесткости конструкции и удержание груза в заданном положении.
Указанный технический результат достигается навесным вильчато-захватным манипулятором, содержащим гидросистему для управления силовыми гидроцилиндрами, основание в виде плоской треугольной рамы, опорные башмаки, шарнирные узлы, основную стрелу, рукоять, силовые гидроцилиндры, согласно изобретению дополнительно содержит вильчатый захват с жестко закрепленной в нижней части проушиной, два коромысла одинаковой длины, шатун, дополнительный гидроцилиндр, при этом к основной стреле с низу жестко крепится проушина, которая соединяется с корпусом дополнительного цилиндра с помощью цилиндрического шарнира вращения, при этом вильчатый захват в верхней части соединяется с рукоятью и с одним концом первого коромысла посредством цилиндрического шарнира вращения, при этом в нижней части вильчатого захвата проушина со вторым концом первого коромысла и с одной стороны шатуна соединяются между собой с помощью цилиндрического шарнира вращения, при этом дополнительный гидроцилиндр штоком соединяется с другой стороной шатуна и с одним концом второго коромысла с помощью цилиндрического шарнира вращения, а другой конец второго коромысла крепится шарнирно с основной стрелой и рукоятью, при этом рукоять, шатун и два коромысла в сборе представляют форму параллелограммного механизма. Длина дополнительного гидроцилиндра изменяет положение и угол вильчатого захвата. Изобретение поясняется чертежом.
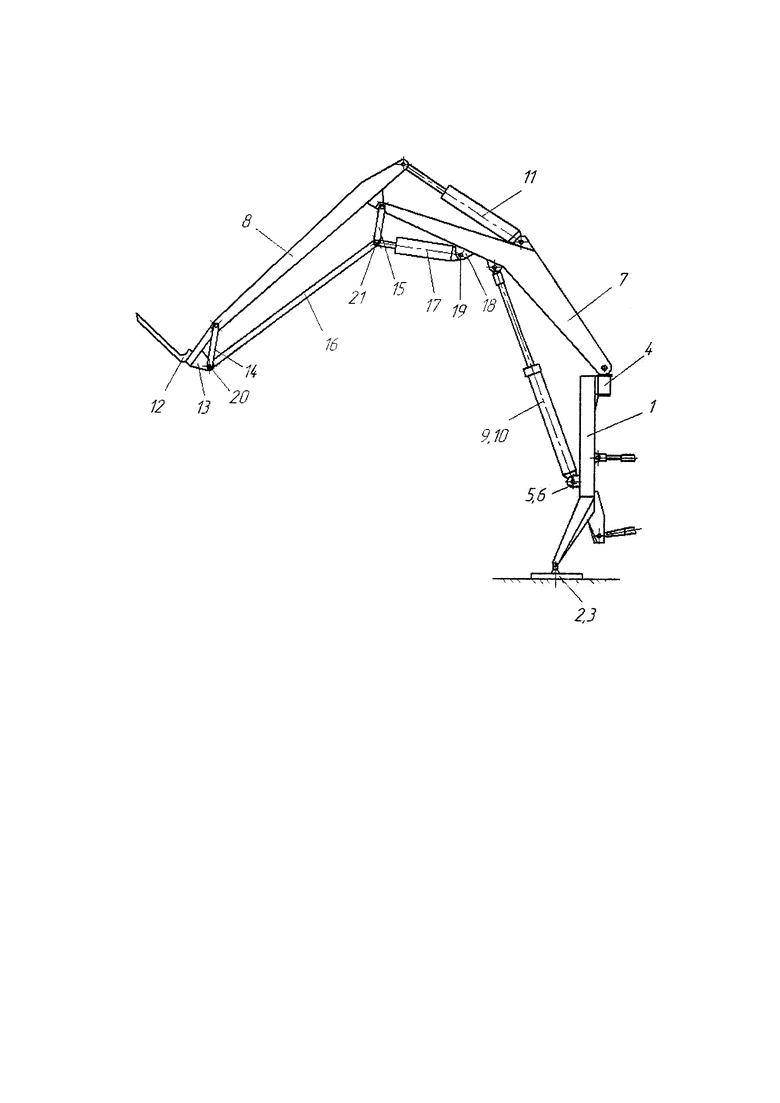
На фигуре представлен общий вид навесного вильчато-захватного манипулятора.
Сведения, подтверждающие возможность реализации заявленного изобретения, заключается в следующем.
Предлагаемый навесной вильчато-захватный манипулятор состоит из гидросистемы для управления силовыми гидроцилиндрами (на фигуре не указана), основания 1, выполненного в виде плоской пустотелой треугольной рамы, которое опирается с двух сторон на опорные башмаки 2 и 3, на углах рамы смонтированы три шарнирных узла 4-6, представленные как консольно-поворотные опоры с проушинами. Грузозахватная стрела представлена как основная стрела 7, которая одним концом шарнирно крепится с рукоятью 8, а другим с консольно-поворотной опорой с проушиной 4. Перемещение и изменение положения грузозахватной стрелы, осуществляется с помощью силовых гидроцилиндров 9-11, шарнирно соединенные с основанием 1 консольно-поворотными опорами с проушинами 5 и 6, основной стрелой 7 и рукоятью 8. К грузозахватной стреле монтируются между собой шарнирно вильчатый захват 12 с жестко закрепленной в нижней части проушиной 13, два одинаковой длины коромысла 14 и 15, шатун 16 и дополнительный гидроцилиндр 17 следующим образом. К основной стреле 7 снизу жестко крепиться проушина 18, которая соединяется с корпусом дополнительного цилиндра 17 посредством цилиндрического шарнира вращения 19. Вильчатый захват 12 в верхней части соединяется с рукоятью 8 и с одним концом первого коромысла 14 посредством цилиндрического шарнира вращения, а нижняя часть вильчатого захвата 12 с проушиной 13 со вторым концом первого коромысла 14 и с одной стороны шатуна 16 соединяются между собой с помощью цилиндрического шарнира вращения 20. Дополнительный гидроцилиндр 17 штоком соединяется с другой стороной шатуна 16 и с одним концом второго коромысла 15 с помощью цилиндрического шарнира вращения 21, а другой конец второго коромысла 15 крепится шарнирно с основной стрелой 7 и рукоятью 8. Таким образом в сборе рукоять 8, шатун 16 и два одинаковой длины коромысла 14 и 15 представляют форму параллелограммного механизма.
Работа навесного вильчато-захватного манипулятора осуществляется следующим образом.
При изменении длины (перемещение штока) какого либо силового гидроцилиндра 9 или 10 изменяется форма трехгранной пространственной системы и ее основная стрела 7 начинает разворачиваться. При одновременном перемещении штоков обоих силовых гидроцилиндров 9, 10 основная стрела 7 перемещается в вертикальной и горизонтальной плоскостях. При работе третьего силового гидроцилиндра 11 рукоять 8 поворачивается в вертикальной плоскости. При одновременной совместной работе всех силовых гидроцилиндров 9-11 вильчатый захват 12 (рабочий орган) ориентируется перед грузом таким образом, чтобы его вилы располагались горизонтально относительно груза с возможностью перемещения вил под груз и дальнейшего его подъема или опускания. Для предотвращения соскальзывания груза с вил в работу включается дополнительный гидроцилиндр 17. При перемещении штока дополнительного гидроцилиндра 17 изменяется конфигурация формы параллелограммного механизма за счет совместного поворота двух коромысел 14 и 15, соединенных между собой шатуном 16. Вильчатый захват 12 с проушиной 13, соединенный с коромыслом 14, шатуном 16 и вращающимся шарниром 20 поворачивается в вертикальной плоскости относительно цилиндрического шарнира в точке соединения рукояти 8, коромысла 14 и вильчатый захвата 12 в верхней части. Параллелограммный механизм помимо поворота вильчатого захвата 12 обеспечивает также удерживать груз в одном положении и придает жесткость конструкции.
| название | год | авторы | номер документа |
|---|---|---|---|
| Навесной вилочный погрузчик | 2021 |
|
RU2768979C1 |
| Навесной вилочный погрузчик | 2021 |
|
RU2764788C1 |
| Робот-манипулятор | 2018 |
|
RU2700304C1 |
| Навесное грузозахватное оборудование к погрузчику | 1975 |
|
SU555046A1 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ МАНИПУЛЯТОР | 1999 |
|
RU2166846C2 |
| МАНИПУЛЯТОР | 1999 |
|
RU2158708C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2167805C1 |
| МАНИПУЛЯТОР | 2006 |
|
RU2305636C1 |
| МАНИПУЛЯТОР | 2006 |
|
RU2305639C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2166472C1 |
Изобретение относится к грузоподъемной технике, в частности к оборудованию с ограниченной грузоподъемностью для проведения погрузочно-разгрузочных работ, преимущественно контейнерных грузов, и может быть использовано в качестве тракторного погрузчика. Навесной манипулятор содержит гидросистему для управления силовыми гидроцилиндрами, основание в виде плоской треугольной рамы, опорные башмаки, шарнирные узлы, основную стрелу, рукоять, силовые гидроцилиндры и вильчатый захват. Вильчатый захват выполнен с жестко закрепленной в нижней части проушиной. Навесной манипулятор содержит также два коромысла одинаковой длины, шатун и дополнительный гидроцилиндр. Снизу к стреле жестко крепится проушина, которая соединена с корпусом дополнительного гидроцилиндра с помощью цилиндрического шарнира вращения. Вильчатый захват в верхней части соединен с рукоятью и с одним концом первого коромысла посредством цилиндрического шарнира вращения, а в нижней части вильчатого захвата проушина соединена со вторым концом первого коромысла и с одной стороной шатуна с помощью цилиндрического шарнира вращения. Дополнительный гидроцилиндр штоком соединен с другой стороной шатуна и с одним концом второго коромысла с помощью цилиндрического шарнира вращения, а другой конец второго коромысла прикреплен шарнирно к стреле и к рукояти. Рукоять, шатун и два коромысла в сборе представляют форму параллелограммного механизма. Технический результат - обеспечение жесткости конструкции и удержание груза в заданном положении. 1 ил.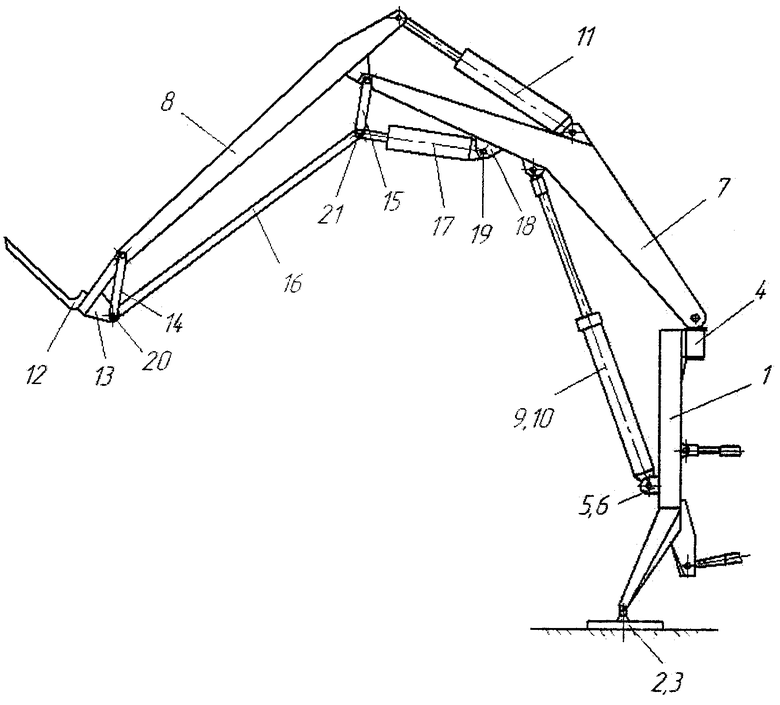
Навесной манипулятор с вильчатым захватом, содержащий основание в виде плоской треугольной рамы, опорные башмаки, шарнирные узлы, стрелу, рукоять, силовые гидроцилиндры, гидросистему для управления силовыми гидроцилиндрами и вильчатый захват, отличающийся тем, что вильчатый захват выполнен с жестко закрепленной в нижней части проушиной, навесной манипулятор содержит два коромысла одинаковой длины, шатун, дополнительный гидроцилиндр, при этом к стреле снизу жестко крепится проушина, которая соединена с корпусом дополнительного гидроцилиндра с помощью цилиндрического шарнира вращения, вильчатый захват в верхней части соединен с рукоятью и с одним концом первого коромысла посредством цилиндрического шарнира вращения, а в нижней части вильчатого захвата проушина соединена со вторым концом первого коромысла и с одной стороной шатуна с помощью цилиндрического шарнира вращения, дополнительный гидроцилиндр штоком соединен с другой стороной шатуна и с одним концом второго коромысла с помощью цилиндрического шарнира вращения, а другой конец второго коромысла прикреплен шарнирно к стреле и к рукояти, причем рукоять, шатун и два коромысла в сборе представляют форму параллелограммного механизма.
| Навесное грузозахватное оборудование к погрузчику | 1975 |
|
SU555046A1 |
| Погрузчик | 1979 |
|
SU829552A1 |
| Грузоподъемное устройство | 1984 |
|
SU1230985A1 |
| Погрузчик | 1989 |
|
SU1687571A1 |
| US 4423997 A1, 03.01.1984 | |||
| US 6024191 A1, 15.02.2000. | |||

