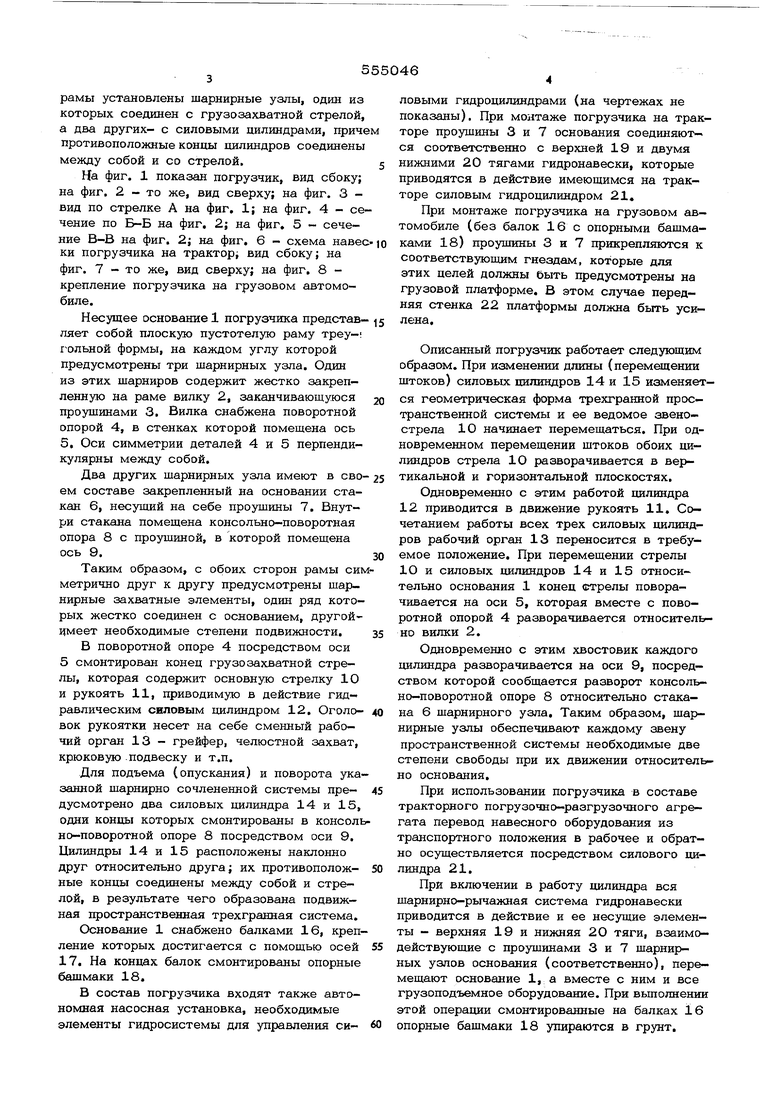
(54) НАВЕСНОЕ ГРУЗОЗАХВАТНОЕ ОБОРУДОВАНИЕ К ПОГРУЗЧИКУ рамы установлены шарнирные узлы, один из которых соединен с грузозахватной стрелой, а два других- с силовыми цилиндрами, приче противоположные концы цилиндров соединены между собой и со стрелой. На фиг. 1 показан погрузчик, вид сбоку; на фиг, 2 - то же, вид сверху; на фиг. 3 - вид по стрелке А на фиг, 1; на фиг. 4 - се чение по Б-Б на фиг, 2; на фиг, 5 - сечение В-В на фиг. 2; на фиг, 6 - схема навес ки погрузчика на трактор; вид сбоку; на фиг. 7 - то же, вид сверху; на фиг, 8 крепление погрузчика на грузовом автомобиле. Несущее основание погрузчика представляет собой плоскую пустотелую раму треу-: г-ольной формы, на каждом углу которой предусмотрены три шарнирных узла. Один из этих шарниров содержит жестко закреп- ленную на раме вилку 2, заканчивающуюся проущинами 3. Вилка снабжена поворотной опорой 4, в стенках которой помещена ось 5, Оси симметрии деталей 4 и 5 перпендикулярны между собой. Два других щарнирных узла имеют в сво- 25 ем составе закрепленный на основании стакан 6, несущий на себе проушины 7, Внутри стакана помещена консольно-поворотная опора 8 с проушиной, в которой помешена ось 9. Таким образом, с обоих сторон рамы сим метрично друг к другу предусмотрены шарнирные захватные элементы, один ряд которых жестко соединен с основанием, другойимеет необходимые степени подвижности, В поворотной опоре 4 посредством оси 5 смонтирован конец грузозахватной стрелы, которая содержит основную стрелку 10 и рукоять 11, приводимую в действие гидравлическим силовым цилиндром 12, Оголо- до
вок рукоятки несет на себе сменный рабочий орган 13 - грейфер, челюстной захват, крюковую -Подвеску и т,п.
Для подъема (опускания) и поворота указанной шарнирно сочлененной системы пре- 45 дусмотрено два силовых цилиндра 14 и 15, одни концы которых смонтированы в консольно-поворотной опоре 8 посредством оси 9, Цилиндры 14 и 15 расположены наклонно друг относительно друга; их противополож- 50 ные концы соединены между собой и стрелой, в результате чего образована подвижная пространственная трехгранная система.
Основание 1 снабжено балками 16, креп- ление которых достигается с помощью осей 55 17, На концах балок смонтированы опорные башмаки 18, В состав погрузчика входят также автономная насосная установка, необходимые элементы гидросистемы для управления си- 60
нирные узлы обеспечивают каждому звену пространственной системы необходимые две степени свободы при их движении относительно основания.
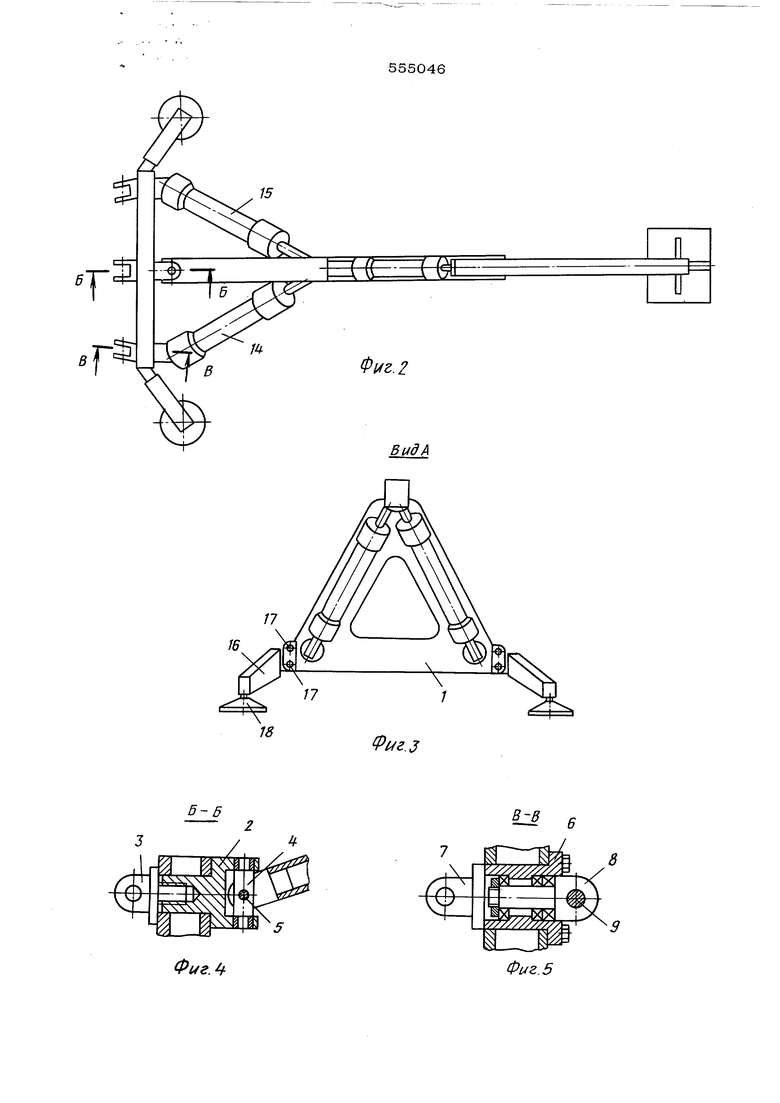
При использовании погрузчика в составе тракторного погрузочно-разгрузочного агрегата перевод навесного оборудования из транспортного положения в рабочее и обратно осуществляется посредством силового цилиндра 21,
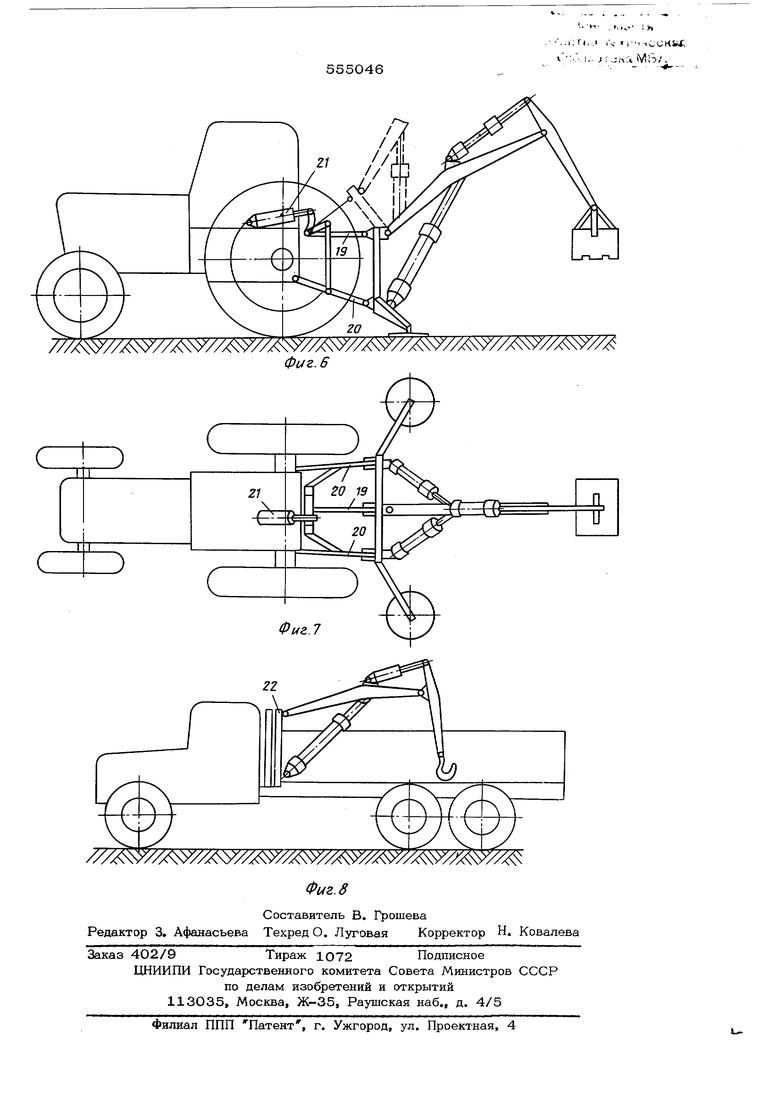
При включении в работу цилиндра вся шарнирно-рычажная система гидронавески приводится в действие и ее несущие элементы - верхняя 19 и нижняя 2О тяги, взаимоловыми гидроцилиндрами (на чертежах не показаны). При монтаже погрузчика на тракторе проушины 3 и 7 основания соединяются соответственно с верхней 19 и двумя нижними 20 тягами гидронавески, которые приводятся в действие имеющимся на тракторе силовым гидроцилиндром 21, При монтаже погрузчика на грузовом автомобиле (без балок 16с опорными башмаками 18) проушины 3 и 7 прикрепляются к соответствующим гнездам, которые для этих целей должны быть предусмотрены на грузовой платформе, В этом случае передняя стенка 22 платформы должна быть усилена. Описанный погрузчик работает следующим образом. При изменении длины (перемещении щтоков) силовых цилиндров 14 и 15 изменяется геометрическая форма трехгранной пространственной системы и ее ведомое звенострела 10 начинает перемещаться. При одновременном перемещении щтоков обоих цилиндров стрела 1О разворачивается в вертикальной и горизонтальной плоскостях. Одновременно с этим работой цилиндра 12 приводится в движение рукоять 11, Сочетанием работы всех трех силовых цилиндров рабочий орган 13 переносится в требуемое положение. При перемещении стрелы 1О и силовых цилиндров 14 и 15 относительно основания 1 конец (стрелы поворачивается на оси 5, которая вместе с поворотной опорой 4 разворачивается относитель но вилки 2, Одновременно с этим хвостовик каждого хщлиндра разворачивается на оси 9, посредством которой сообщается разворот консольно-поворотной опоре 8 относительно стакана 6 щарнирного узла. Таким образом, щар- действующие с проущинами 3 и 7 щарнирных узлов основания (соответственно), перемещают основание 1, а вместе с ним и все грузоподъемное оборудование. При выполнении этой операции смонтированные на балках 1б опорные бащмаки 18 упираются в грунт. После вывешивания навесного оборудования золотник управления устанавливается в нейтральное положение, фиксируя в определенном положении шток силового цилиндра 21 и всю шарнирно-рычажную систему гидронавески. При монтаже погрузчика на грузовом автомобиле вьшимаются оси 17 и бал ки 16 с опорными башмаками 18 отсоединяются. Далее погрузчик монтируется на передней стенке 22 грузовой платформы и используется в описанном выше порядке. Аналогичным образом погрузчик может быть стационарно закреплен, в частности, на стене и помещении (мастерская и т.п.) и использоваться в качестве консольно-поворотного крана. Таким образом, предлагаемый погрузчик является по существу универсальным погрузочно-разгрузочным средством. Формула изобретения Навесное грузозахватное оборудование к погрузчику, содержащее основание, несущее на себе грузозахватную стрелу, приводимую в действие силовыми гидроцилиндрами, и гидросистему для управления цилиндрами, отличающееся тем, что, с целью сокращения цикла моцтажа и демонтажа, упрощения конструкции грузозахватного оборудования, основание выполнено в виде плоской треугольной рамы со съемными балками, несущими опорные башмаки, а на углах рамы установлены шарнирные узлы, один из которых соединен с грузозахватной стрелой, а два других-с силовыми гидроцилиндрами, причем противоположные концы цилиндров соединены между собой и со стрелой. Источники информации, принятые во внимание при экспертизе: 1.Борисов А. М. и др. Сельскохозяйственные погрузочно-разгрузочные машины, М., Машиностроение, 1973 г. 2.Авторское свидетельство СССР 160813, М. Кл.В 66 F 9/06 от 1964 г. (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| НАВЕСНОЙ МАНИПУЛЯТОР С ВИЛЬЧАТЫМ ЗАХВАТОМ | 2021 |
|
RU2760476C1 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ МАНИПУЛЯТОР | 1999 |
|
RU2166846C2 |
| НАВЕСНОЕ ГРУЗОЗАХВАТНОЕ ОБОРУДОВАНИЕ К ПОГРУЗЧИКУ | 1991 |
|
RU2016837C1 |
| Навесное грузоподъемное оборудование к погрузчику | 1981 |
|
SU1098906A1 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ МАНИПУЛЯТОР | 2000 |
|
RU2178961C1 |
| КРАН-МАНИПУЛЯТОР | 2005 |
|
RU2312057C2 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2274559C1 |
| Навесное грузозахватное оборудование к погрузчику | 1990 |
|
SU1763354A1 |
| КРАН-МАНИПУЛЯТОР | 1992 |
|
RU2053191C1 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2263589C1 |
16
.з
В-в
8
ФиеЛ
Фиг. 5
