Перекрестная ссылка на родственную заявку
[0001] Настоящая заявка испрашивает приоритет по предварительной заявке на получение патента США №62/560,591, поданной 19 сентября 2017 г., и по предварительной заявке на получение патента США №62/585,888, поданной 14 ноября 2017 г., полное содержание которых включено в настоящий документ посредством ссылки.
Область техники, к которой относится изобретение
[0002] Настоящая технология относится к управлению дифференциалом ограниченного проскальзывания на основе крутящего момента двигателя, к способу управления дифференциалом ограниченного проскальзывания и к транспортному средству, включающему дифференциал ограниченного проскальзывания.
Уровень техники
[0003] Существуют различные типы транспортных средств, используемых в основном в условиях бездорожья. Одним из таких типов является внедорожное транспортное средство с расположением кресел бок о бок. «Бок о бок» означает расположение сидений транспортного средства, в котором водитель и пассажир сидят в ряд. Некоторые внедорожные транспортные средства с расположением кресел бок о бок также имеют второй ряд сидений для размещения одного или более дополнительных пассажиров. Эти транспортные средства обычно имеют открытый салон, каркас безопасности и рулевое колесо.
[0004] Для работы в условиях бездорожья транспортное средство с расположением кресел бок о бок должно быть способно справляться с ухабистым рельефом, чтобы работать на различных поверхностях, включая, но не ограничиваясь этим, песок, грязь и наносы. Эти условия представляют особенные проблемы, обычно не учитываемые при разработке дорожных транспортных средств, таких как автомобили. Одна такая проблема заключается в обеспечении крутящего момента для каждого ведущего колеса в различных условиях, таких как величина поворота, ориентация транспортного средства при подъеме на возвышенность, степень ускорения, скользкая или скалистая местность и тому подобное.
[0005] Дифференциал в целом используется для приема крутящего момента от приводного вала и для перенаправления крутящего момента через половинчатые валы в направлении двух ведущих колес транспортного средства. Дифференциал позволяет половинчатым валам и соответствующим колесам вращаться с разными скоростями, поскольку желательно обеспечивать возможность вращения внутреннего колеса с несколько более низкой скоростью, чем внешнего колеса, когда транспортное средство выполняет поворот. Однако, когда одно из колес находится на скользкой местности, дифференциал может направлять весь крутящий момент на это одно колесо, которое может без необходимости проскальзывать, не позволяя транспортному средству двигаться, при этом крутящий момент не передается на другое колесо. Дифференциал ограниченного проскальзывания (ДОП) обычно используется для ограничения разницы скорости вращения между левым и правым ведомыми колесами из набора колес. В транспортном средстве, оснащенном ДОП, если левое колесо (например) находится на участке местности с низкой силой сцепления, оно будет проскальзывать только в малой степени перед тем, как ДОП начнет передавать крутящий момент на противоположное правое колесо. Поскольку правое колесо может находиться на местности с лучшей силой сцепления, это обеспечивает транспортному средству возможность двигаться до тех пор, пока оба колеса не будут находиться на местности с лучшей силой сцепления.
[0006] Традиционные ДОП имеют ряд эксплуатационных ограничений.
[0007] Традиционные ДОП может блокировать оба колеса из набора колес как только имеется некоторая разница скорости вращения между двумя колесами. Это может побудить ДОП к блокированию обоих колес, когда транспортное средство двигается по кривой, даже если оба колеса могут иметь хорошую силу сцепления в этот момент времени. Несмотря на то, что блокирование ДОП может предотвратить проскальзывание колеса, управление транспортным средством становится сложным, когда ДОП заблокирован, поскольку заблокированный ДОП действует вопреки естественным разницам скорости между более медленным колесом с внутренней стороны кривой и более быстрым колесом с внешней стороны кривой.
[0008] Для предотвращения блокирования ДОП при каждом повороте транспортного средства, ДОП может быть сконфигурирован для обеспечения достаточно большой разницы скорости вращения между двумя колесами оси. Несмотря на то, что это исполнение может предотвратить ненужное блокирование ДОП при каждом повороте, оно может задержать передачу крутящего момента на колесо, имеющее лучшую силу сцепления, когда противоположное колесо находится на скользкой местности. Такие задержки блокирования ДОП могут привести к трудности управления транспортным средством на скользкой местности и привести к плохому режиму езды. Данное отсутствие проактивности традиционного ДОП может даже привести к тому, что транспортное средством застрянет на местности с низкой силой сцепления, такой как грязь или лед, или потеряет момент при подъеме в скалистой местности. Более того, задержки блокирования ДОП может вызвать важное проскальзывание ведомых колес после сильного ускорения сточки старта.
[0009] Когда транспортное средство перемещается по сильной грязи или в подобных скользких условиях езды, крутящий момент, применяемый к колесам, может часто меняться и может меняться сильно. Это может вызвать непрерывное повторное блокирование и разблокирование ДОП. Это поведение ДОП является не только неэффективным, но может оказать пагубное влияние на режим езды, при этом потенциально вызывая преждевременное повреждение ДОП. Некоторые ДОП имеют ручной режим блокирования, который может быть использован для преодоления этой проблемы постоянного блокирования и разблокирования. Пользователь транспортного средства может вручную заблокировать ДОП, например, когда пользователь прогнозирует то, что транспортное средством собирается заехать на участок с грязью. ДОП остается заблокированным до его разблокирования пользователем. Хотя это может помочь предотвратить то, что транспортное средство застрянет на участке с грязью, это может затруднить движение транспортного средств, если ДОП по-прежнему заблокирован вручную, когда снова появились улучшенные условия поверхности, поворот, например, становится трудным. На некоторых участках бездорожья пользователю может быть необходимо часто повторно блокировать и разблокировать ДОП. Транспортное средство может остаться застрявшим в участке с грязью, если пользователь вовремя не отреагировал путем ручного блокирования ДОП при попадании в скользкие условия для езды.
[0010] Таким образом, имеется потребность в управлении дифференциалами ограниченного проскальзывания, устраняющем указанные выше проблемы.
Раскрытие сущности изобретения
[0011] Целью настоящей технологии является устранение по меньшей мере некоторых неудобств, существующих в предшествующем уровне техники.
[0012] В настоящей технологии представлен дифференциал ограниченного проскальзывания (ДОП), управляемый в соответствии с крутящим моментом двигателя и в соответствии со скоростью транспортного средства, включающей ДОП и двигатель. ДОП установлен на оси транспортного средства. ДОП приводится в действие двигателем и передает крутящий момент двигателя на левое и правое колеса на обоих концах оси. Предварительная нагрузка применяется к ДОП. Предварительная нагрузка определяется на основе крутящего момента двигателя, положения средства управления ускорителя и скорости транспортного средства. Данный способ управления ДОП может помогать, в частности, но без исключения, при подъеме внедорожного транспортного средства на гору.
[0013] Согласно одному аспекту настоящей технологии, представлен способ управления дифференциалом ограниченного проскальзывания (ДОП) транспортного средства, транспортное средство имеет двигатель, ДОП, а также левое и правое ведомые колеса, функционально соединенные с ДОП. Способ включает: определение текущего выходного крутящего момента двигателя; определение положения средства управления ускорителем; определение прогнозированного крутящего момента двигателя на основе текущего выходного крутящего момента двигателя и положения средства управления ускорителем; определение скорости транспортного средства; определение значения предварительной нагрузки для применения к ДОП, значение предварительной нагрузки основано на прогнозированном крутящем моменте двигателя и скорости транспортного средства; и применение предварительной нагрузки к ДОП, когда значение предварительной нагрузки больше нуля.
[0014] В некоторых реализациях настоящей технологии способ дополнительно включает: определение скоростей вращения левого и правого колес; и определение среднего значения скоростей вращения левого и правого колес.
[0015] В некоторых реализациях настоящей технологии определение скорости транспортного средства дополнительно включает определение скорости транспортного средства на основе среднего значения скоростей вращения левого и правого колес и на основе размера левого и правого колес.
[0016] В некоторых реализациях настоящей технологии применение предварительной нагрузки к ДОП включает сжатие муфты ДОП для уменьшения разницы скорости вращения левого и правого колес.
[0017] В некоторых реализациях настоящей технологии сжатие муфты ДОП включает использование электрического двигателя для приведения в действие набора шестерней и рампы для шариков для применения крутящего момента к муфте.
[0018] В некоторых реализациях настоящей технологии сжатие муфты ДОП дополнительно включает использование соленоида для блокирования набора шестерней.
[0019] В некоторых реализациях настоящей технологии способ дополнительно включает применение прогнозированного крутящего момента двигателя и скорости транспортного средства к таблице соответствия нагрузки для считывания значения крутящего момента, подлежащего применению для сжатия муфты.
[0020] В некоторых реализациях настоящей технологии способ дополнительно включает: определение положения переключателя коробки передач; и выбор таблицы соответствия нагрузки из множества таблиц соответствия нагрузки в соответствии с положением переключателя коробки передач.
[0021] В некоторых реализациях настоящей технологии способ дополнительно включает: определение скорости изменения положения средства управления ускорителем с течением времени; прогнозированный крутящий момент двигателя дополнительно основан на скорости изменения положения средства управления ускорителем стечением времени.
[0022] В некоторых реализациях настоящей технологии определение прогнозированного крутящего момента двигателя включает добавление регулировки крутящего момента, пропорциональной скорости изменения положения средства управления ускорителем с течением времени, и текущего выходного крутящего момента двигателя.
[0023] В некоторых реализациях настоящей технологии определение прогнозированного крутящего момента двигателя включает: применение положения средства управления ускорителем и ограниченной по времени скорости изменения положения средства управления ускорителем с течением времени к таблице соответствия крутящего момента для получения оценки крутящего момента двигателя; корректировку оценки крутящего момента двигателя на основе поправочного коэффициента средства управления ускорителем для определения проецированного крутящего момента; определение поправки крутящего момента на основе текущего выходного крутящего момента двигателя и поправочного коэффициента крутящего момента; и добавление проецированного крутящего момента и поправки крутящего момента.
[0024] Согласно другому аспекту настоящей технологии, представлен узел дифференциала для применения в транспортном средстве, имеющем двигатель, а также левое и правое ведомые колеса. Узел дифференциала содержит: дифференциал ограниченного проскальзывания (ДОП), выполненный с возможностью функционального соединения с приводным валом и с левым и правым ведомыми колесами, ДОП адаптирован для передачи крутящего момента от приводного вала на левое и правое ведомые колеса; датчик для мониторинга крутящего момента двигателя; датчик средства управления ускорителем; датчик скорости; и блок управления, функционально соединенный с ДОП, с датчиком для мониторинга крутящего момента двигателя, с датчиком средства управления ускорителем и с датчиком скорости, блок управления адаптирован для: определения прогнозированного крутящего момента двигателя на основе измерения крутящего момента двигателя от датчика для мониторинга крутящего момента двигателя и положения средства управления ускорителем, выданного датчиком средства управления ускорителем; определения скорости транспортного средства на основе измерения от датчика скорости, определения значения предварительной нагрузки для применения к ДОП, значение предварительной нагрузки основано на прогнозированном крутящем моменте двигателя и скорости транспортного средства, и управления применением предварительной нагрузки к ДОП, когда значение предварительной нагрузки больше нуля.
[0025] В некоторых реализациях настоящей технологии датчик скорости измеряет скорости вращения левого и правого колес, блок управления дополнительно адаптирован для определения среднего значения скоростей вращения левого и правого колес.
[0026] В некоторых реализациях настоящей технологии узел дифференциала дополнительно содержит электрический двигатель, применяющий предварительную нагрузку к ДОП, включая управление предварительной нагрузкой, применяемой электрическим двигателем к ДОП.
[0027] В некоторых реализациях настоящей технологии ДОП дополнительно содержит сжимаемую муфту, применяющую предварительную нагрузку к ДОП, включая сжатие муфты.
[0028] В некоторых реализациях настоящей технологии ДОП дополнительно содержит набор шестерней и рампу для шариков, зубчатая передача адаптирована для применения предварительной нагрузки от электрического двигателя к рампе для шариков для сжатия муфты.
[0029] В некоторых реализациях настоящей технологии узел дифференциала дополнительно содержит соленоид, имеющий зубец, адаптированный для зацепления с набором шестерней, когда соленоид запитан, блок управления дополнительно адаптирован для управления соленоидом для блокирования ДОП.
[0030] В некоторых реализациях настоящей технологии блок управления содержит: входной порт, адаптированный для приема измерений от датчика для мониторинга крутящего момента двигателя, от датчика средства управления ускорителем и от датчика скорости; выходной порт, адаптированный для передачи команд управления на ДОП; и процессор, функционально соединенный со входным портом и с выходным портом, процессор адаптирован для: определения прогнозированного крутящего момента двигателя, определения скорости транспортного средства, определения значения предварительной нагрузки для применения к ДОП, и побуждения выходного орта к передаче команды управления для применения предварительной нагрузки к ДОП, когда значение предварительной нагрузки больше нуля.
[0031] В некоторых реализациях настоящей технологии блок управления дополнительно содержит память, хранящую конфигурационную информацию для управления ДОП; а процессор функционально соединен с памятью.
[0032] В некоторых реализациях настоящей технологии конфигурационная информация содержит таблицу соответствия нагрузки, содержащую множество значений крутящего момента для применения к сжимаемой муфте ДОП в зависимости от множества значений прогнозированного крутящего момента двигателя и в зависимости от множества значений скорости транспортного средства; и процессор дополнительно адаптирован для применения прогнозированного крутящего момента двигателя и скорости транспортного средства к таблице соответствия нагрузки для определения значения входного крутящего момента для ДОП.
[0033] В некоторых реализациях настоящей технологии узел дифференциала дополнительно содержит: индикатор положения переключателя, адаптированный для выдачи индикации текущего передаточного отношения коробки передачи транспортного средства; конфигурационная информация содержит множество таблиц соответствия нагрузки, каждая таблица соответствия нагрузки содержит, для соответствующего передаточного отношения, множество значений крутящего момента для применения к сжимаемой муфте ДОП в зависимости от множества значений прогнозированного крутящего момента двигателя и в зависимости от множества значений скорости транспортного средства; процессор дополнительно адаптирован для выбора одной из множества таблиц соответствия нагрузки на основе текущего передаточного отношения; процессор дополнительно адаптирован для применения прогнозированного крутящего момента двигателя и скорости транспортного средства к выбранному соответствию для определения значения крутящего момента, подлежащего применению для сжатия муфты.
[0034] В некоторых реализациях настоящей технологии процессор дополнительно адаптирован для: приема, посредством входного порта, измерения крутящего момента двигателя; приема, посредством входного порта, положения средства управления ускорителем; приема, посредством входного порта, скорости изменения положения средства управления ускорителем с течением времени; и вычисления поправочного коэффициента крутящего момента на основе скорости изменения положения средства управления ускорителем с течением времени; прогнозированный крутящий момент двигателя определяется на основе поправочного коэффициента крутящего момента и измерения крутящего момента двигателя.
[0035] В некоторых реализациях настоящей технологии процессор дополнительно адаптирован для: приема, посредством входного порта, измерения крутящего момента двигателя; приема, посредством входного порта, последовательных сигналов, предоставляющих положения средства управления ускорителем; определения скорости изменения положения средства управления ускорителем с течением времени; и вычисления поправочного коэффициента крутящего момента на основе скорости изменения положения средства управления ускорителем с течением времени; прогнозированный крутящий момент двигателя определяется на основе поправочного коэффициента крутящего момента и измерения крутящего момента двигателя.
[0036] В некоторых реализациях настоящей технологии процессор дополнительно адаптирован для определения прогнозированного крутящего момента двигателя путем добавления регулировки крутящего момента, пропорциональной скорости изменения положения средства управления ускорителем стечением времени, и измерения крутящего момента двигателя.
[0037] В некоторых реализациях настоящей технологии процессор дополнительно адаптирован для определения прогнозированного крутящего момента двигателя путем: применения положения средства управления ускорителем и ограниченной по времени скорости изменения положения средства управления ускорителем с течением времени к таблице соответствия крутящего момента для получения оценки крутящего момента двигателя; корректировки оценки крутящего момента двигателя на основе поправочного коэффициента средства управления ускорителем для определения проецированного крутящего момента; определения поправки крутящего момента на основе измерения крутящего момента двигателя и поправочного коэффициента крутящего момента; и добавления проецированного крутящего момента и поправки крутящего момента.
[0038] Согласно еще одному аспекту настоящей технологии, представлено транспортное средство, содержащее: раму; узел передней подвески, соединенный с рамой; узел задней подвески, соединенный с рамой; левое ведомое колесо и правое ведомое колесо, соединенные с одним из узлов передней и задней подвески; по меньшей мере одно другое колесо соединено с другим из узлов передней и задней подвески; двигатель, соединенный с рамой; коробку передач, функционально соединенную с двигателем для приема крутящего момента от двигателя; приводной вал, функционально соединенный с коробкой передач для передачи крутящего момента от коробки передач на левое и правое ведомые колеса; и узел дифференциала. Узел дифференциала содержит: дифференциал ограниченного проскальзывания (ДОП), функционально соединенный с приводным валом и с левым и правым ведомыми колесами, ДОП адаптирован для передачи крутящего момента от приводного вала на левое и правое ведомые колеса; датчик для мониторинга крутящего момента двигателя; датчик средства управления ускорителем; датчик скорости; и блок управления, функционально соединенный с ДОП, с датчиком для мониторинга крутящего момента двигателя, с датчиком средства управления ускорителем и с датчиком скорости, блок управления адаптирован для: определения прогнозированного крутящего момента двигателя на основе измерения крутящего момента двигателя от датчика для мониторинга крутящего момента двигателя и положения средства управления ускорителем, выданного датчиком средства управления ускорителем; определения скорости транспортного средства на основе измерения от датчика скорости, определения значения предварительной нагрузки для применения к ДОП, значение предварительной нагрузки основано на прогнозированном крутящем моменте двигателя и скорости транспортного средства, и управления применением предварительной нагрузки к ДОП, когда значение предварительной нагрузки больше нуля.
[0039] В некоторых реализациях настоящей технологии транспортное средство дополнительно содержит ведущий мост в блоке с коробкой передач для передачи крутящего момента от коробки передач на по меньшей мере одно другое колесо; и устройство выбора, адаптированное для выборочного функционального соединения ДОП с приводным валом.
[0040] Каждый из вариантов реализации настоящей технологии имеет по меньшей мере одну из вышеуказанных целей и/или аспектов, но не обязательно имеет все из них. Следует понимать, что некоторые аспекты представленной технологии, являющиеся результатом попытки достижения вышеуказанной цели, могут не удовлетворять данной цели и/или могут удовлетворять другим целям, которые конкретно не указаны в данном документе.
[0041] Дополнительные и/или альтернативные признаки, аспекты и преимущества реализаций настоящей технологии станут понятны из следующего описания, сопроводительных чертежей и прилагаемой формулы изобретения.
Краткое описание чертежей
[0042] Для улучшенного понимания настоящей технологии, а также ее других аспектов и дополнительных признаков, делается ссылка на следующее описание, которое следует использовать вместе с сопроводительными чертежами, где:
[0043] Фигура 1 представляет собой вид в перспективе внедорожного транспортного средства, взятый спереди слева;
[0044] Фигура 2 представляет собой вид с торца слева транспортного средства, показанного на Фигуре 1;
[0045] Фигура 3 представляет собой вид с торца сзади приборной панели транспортного средства, показанного на Фигуре 1;
[0046] Фигура 4 представляет собой вид с торца слева силового агрегата транспортного средства, показанного на Фигуре 1;
[0047] Фигура 5 представляет собой вид в разрезе слева силового агрегата, показанного на Фигуре 4;
[0048] Фигура 6 представляет собой прямой вид снизу силового агрегата, показанного на Фигуре 4;
[0049] Фигура 7 представляет собой вид в перспективе, взятый сзади слева узла переднего дифференциала силового агрегата, показанного на Фигуре 4;
[0050] Фигура 8 представляет собой схематический вид в поперечном сечении узла дифференциала, показанного на Фигуре 7;
[0051] Фигура 9 представляет собой вид в поперечном сечении примера конструкции узла дифференциала, показанного на Фигуре 7;
[0052] Фигура 10 представляет временные диаграммы, показывающие вариации угла поворота (верхняя диаграмма), вариации проскальзывания колеса и диапазон между максимально и минимально допустимым проскальзыванием, вычисляемые блоком управления двигателем (средняя диаграмма), и команды управления для нагрузки и/или блокирования ДОП (нижняя диаграмма);
[0053] Фигура 11 представляет собой графическое представление предела проскальзывания (верхняя диаграмма), варьирующегося в зависимости от скорости вращения передних колес транспортного средства, показанного на Фигуре 1 (нижняя диаграмма);
[0054] Фигуры 12а и 12b представляют собой логическую диаграмму, показывающую операции способа управления дифференциалом ограниченного проскальзывания на основе угла поворота транспортного средства;
[0055] Фигура 13 представляет собой логическую диаграмму, показывающую детали способа применения нагрузки к дифференциалу ограниченного проскальзывания;
[0056] Фигура 14 представляет собой блок-диаграмму блока управления для дифференциала ограниченного проскальзывания;
[0057] Фигура 15 представляет собой блок-диаграмму, показывающую внутренние операции блока управления для определения прогнозируемого крутящего момента двигателя, согласно реализации;
[0058] Фигура 16 представляет собой логическую диаграмму, показывающую операции способа управления дифференциалом ограниченного проскальзывания на основе крутящего момента двигателя;
[0059] Фигура 17 представляет собой блок-диаграмму, показывающую внутренние операции блока управления для управления ДОП в режиме грязи, согласно реализации;
[0060] Фигура 18 представляет собой график линии нагрузки двигателя;
[0061] Фигуры 19а-19е представляют логические диаграммы, показывающие операции способа управления дифференциалом ограниченного проскальзывания на основе условий езды;
[0062] Фигура 20 представляет собой блок-диаграмму, показывающую внутренние операции блока управления для управления ДОП в режиме сильного бездорожья, согласно реализации;
[0063] Фигура 21 представляет собой логическую диаграмму, показывающую операции способа управления дифференциалом ограниченного проскальзывания на основе положения средства управления ускорителем;
[0064] Фигура 22 представляет собой логическую диаграмму, показывающую операции способа управления дифференциалом ограниченного проскальзывания для стабилизации поворота транспортного средства; и
[0065] Фигура 23 представляет собой блок-диаграмму, показывающую внутренние операции блока управления для определения максимально и минимально допустимого проскальзывания колеса, согласно реализации.
Осуществление изобретения
[0066] Выражаясь в целом, в настоящей технологии представлено управление дифференциалом ограниченного проскальзывания (ДОП), установленного на оси транспортного средства, это управление по меньшей мере частично основано на измерениях, выдаваемых различными датчиками на блок управления, функционально соединенный с ДОП.
[0067] Настоящая технология будет описана в отношении четырехколесного внедорожного транспортного средства, имеющего два расположенных бок о бок сиденья и руль. Однако предполагается, что по меньшей мере некоторые аспекты настоящей технологии могут быть применены к другим типам транспортных средств, таким как, но без ограничения, внедорожные транспортные средства, имеющие рычаг управления и сиденье мотоциклетного типа (т.е. мотовездеход (all-terrain vehicle, ATV)), внедорожные транспортные средства, имеющие более или менее четырех колес, и дорожные транспортные средства, имеющие три или более колес и имеющие одно или более сидений.
Описание транспортного средства
[0068] Общие характеристики внедорожного транспортного средства 40 будут описаны со ссылкой на Фигуры 1, 2 и 3. Транспортное средство 40 имеет раму 42, два передних колеса 44, соединенных с передней частью рамы 42 узлом 46 передней подвески, и два задних колеса 48, соединенных с рамой 42 узлом 50 задней подвески. Каждое из передних и задних колес 44, 48 имеет диск 45 и шину 47. Диски 45 и шины 47 передних колес 44 могут отличаться по размеру от дисков и шин задних колес 48. В дополнение, несмотря на то, что на Фигурах изображено четыре колеса 44, 48, транспортное средство 40 может включать более или менее четырех колес 44, 48.
[0069] Рама 42 определяет центральный участок 52 кабины, внутри которой расположено сиденье 54 водителя и сиденье 56 пассажира. В настоящей реализации сиденье 54 водителя расположено на левой стороне транспортного средства 40, а сиденье 56 пассажира расположено на правой стороне транспортного средства 40. Однако предполагается, что сиденье 54 водителя может быть расположено на правой стороне транспортного средства 40, а сиденье 56 пассажира может быть расположено на левой стороне транспортного средства 40. Также предполагается, что транспортное средство 40 может включать одно сиденье для водителя или большее количество сидений, или кресло, вмещающее водителя и по меньшей мере одного пассажира. Водитель управляет рулем 58 с сиденья 54 водителя для управления углом передних колес 44.
[0070] Как можно увидеть на Фигуре 2, двигатель 62 соединен с рамой 42 в задней части транспортного средства 40. Двигатель 62 соединен с бесступенчатой коробкой передач (БКП) 64, расположенной на левой стороне двигателя 62. БКП 64 функционально соединена с ведущим мостом 66 в блоке с коробкой передач для передачи крутящего момента от двигателя 62 к ведущему мосту 66 в блоке с коробкой передачи. Ведущий мост 66 в блоке с коробкой передач расположен за двигателем 62. Ведущий мост 66 в блоке с коробкой передач функционально соединен с передними и задними колесами 44, 48 для приведения в движение транспортного средства 40. Двигатель 62, БКП 64 и ведущий мост 66 в блоке с коробкой передач поддерживаются рамой 42. Также предполагается вариант транспортного средства 40, имеющего другой тип коробки передач.
[0071] Ведущий мост 66 в блоке с коробкой передач механически соединен с переключателем 60, расположенным сбоку между двумя сиденьями 54, 56. Переключатель 60 позволяет водителю выбирать из множества комбинаций зацепления шестерней ведущего моста 66 в блоке с коробкой передач, которые в целом называются передачами. В настоящей реализации переключатель 60 позволяет водителю выбирать между передачей заднего хода, двумя передачами переднего хода (повышенной и пониженной) и нейтральным положением, в котором ведущий мост 66 с коробкой передач не передает крутящий момент на колеса 44, 48. Предполагается, что могут быть использованы другие типы соединений между переключателем 60 и ведущим мостом 66 с коробкой передач.
[0072] В реализации функциональное соединение ведущего моста 66 с коробкой передач с передними колесами 44 может быть выбрано, выбор производится с помощью устройства выбора режима езды, находящегося рядом с водителем. Устройство выбора режима езды может содержать тумблерный переключатель 59 (Фигура 3), установленный на приборной панели 61 транспортного средства 40. Тумблерный переключатель 59 имеет два (2) положения для выбора режима с приводом двух колес или режима с приводом всех колес для транспортного средства 40. Устройство выбора режима езды также может содержать тумблерный переключатель 63, имеющий два (2) положения для ручного блокирования и разблокирования дифференциала ограниченного проскальзывания (показанного на представленных далее Фигурах). Устройство выбора режима езды может дополнительно содержать тумблерный переключатель 65, имеющий четыре (4) положения для выбора одного из нормального режима, режима сильного бездорожья, режима грязи и режима подъема на гору. Предполагается, что тумблерный переключатель 65 может обеспечивать выбор только одного или двух из режима сильного бездорожья, режима грязи и режима подъема на гору транспортного средства, у которого доступен только один или два этих режима. Также предполагается использование поворотной ручки для выбора одного из различных режимов и использование разных переключателей для включения и выключения каждого из режима сильного бездорожья, режима грязи и режима подъема на гору. Также предполагается, что поворотная ручка или дополнительные тумблерные переключатели могут быть использованы для выбора других режимов, например, режима песка, режима снега и тому подобного.
[0073] Ссылаясь на Фигуры 4-6, БКП 64 имеет ведущий шкив 68, соединенный с двигателем 62 и приводимый им, а также ведомый шкив 72, установленный на ведущем мосту 66 в блоке с коробкой передач. Ремень 76 передает крутящий момент, применяемый к ведущему шкиву 64 двигателем 62, на ведомый шкив 72, который, в свою очередь, передает крутящий момент на ведущий мост 66 в блоке с коробкой передач. Ведущий шкив 68 и ведомый шкив 72 обеспечивают непрерывно изменяющееся передаточное число посредством открытия или закрытия противолежащих конических боковых сторон одного или более шкивов. Следует понимать, что могут быть использованы альтернативные конфигурации коробки передач.
[0074] В транспортном средстве 40 ведущий мост 66 в блоке с коробкой передачи передает крутящий момент, применяемый к нему ведомым шкивом 72, для приведения в действие задних колес 48, когда устройство выбора режима езды находится в режиме с приводом двух колес, или для приведения в действие передних и задних колес 44, 48, когда устройство выбора режима езды находится в режиме с приводом всех колес. Ведущий мост в блоке с коробкой передач применяет крутящий момент к задним колесам 48 через соответствующие половинчатые валы 78. С этой целью ведущий мост 66 в блоке с коробкой передачи включает дифференциал 80, функционально соединенный с половинчатыми валами 78. Также предполагается использование длинной шестерни вместо дифференциала 80. Когда устройство выбора режима езды находится в режиме привода всех колес, ведущий мост 66 в блоке с коробкой передач применяет часть крутящего момента к половинчатым валам 78, а также применяет другую часть крутящего момента к переднему приводному валу 82. Передний конец переднего приводного вала 82 соединен с другим приводным валом 84 через универсальное соединение 86. Передний конец приводного вала 84 приводит в действие ведущий вал 90 дифференциала 302 ограниченного проскальзывания (ДОП) через другое универсальное соединение 92.
[0075] ДОП 302 функционально соединен с левым и правым передними половинчатыми валами 98 и приводит их в действие. Сбоку, внешние концы передних половинчатых валов 98 функционально соединены с передними колесами 44 и приводят их в действие.
Описание примера узла дифференциала ограниченного проскальзывания
[0076] Фигуры 7 и 8 показывают узел 300 дифференциала ограниченного проскальзывания, включающий ДОП 302, соединенный с ведомыми колесами транспортного средства 40. В реализации узел 300 дифференциала приводит в действие передние колеса 44 транспортного средства 40. Следует понимать, что узел 300 дифференциала, в качестве альтернативы, может быть использован с задними колесами 48 транспортного средства 40 или с любой парой колес любого другого типа транспортного средства. Узел 300 дифференциала включает ДОП 302, блок 370 управления, активатор 372, соленоид 382 и один или более датчиков. Активатор 372, соленоид 382 и датчики электрически соединены с блоком 370 управления. Датчики могут включать один или более датчиков 376, 378 скорости колеса, датчик 380 скорости транспортного средства, датчик 390 угла поворота, датчик 392 средства управления ускорителем, датчик 394 для мониторинга крутящего момента двигателя, индикатор 396 положения переключателя и датчик 398 команды пользователя. Датчик 398 команды пользователя информирует блок 370 управления о состоянии различных тумблерных переключателей 59, 63 и 65. Некоторые из этих датчиков могут присутствовать в некоторых реализациях и отсутствовать в некоторых других реализациях. Все эти датчики, когда присутствуют, соединены с возможностью связи с блоком 370 управления, на который они выдают измерения и обнаруженные информационные элементы.
[0077] На Фигуре 8 изображена частная, неограничивающая реализация ДОП 302. В ДОП 302, как показано на Фигуре 8, ведущий вал 90 соединен с первой конической шестерней, действующей в качестве ведущей шестерни 304. Вращение ведущего вала 90 обуславливает вращение ведущей шестерни 304, что, в свою очередь, обуславливает вращение второй конической шестерни или кольцевой шестерни 306. Вращение кольцевой шестерни 306 обуславливает вращение первых пластин 308 муфты и несущего элемента 310. Вал 312 соединяет несущий элемент 310 с набором шестерней, который включает по меньшей мере две (2) планетарных шестерни 314, 316 и солнечных шестерни 318, 320. Ведомый вал 322 установлен на солнечной шестерне 318, вал 322 и солнечная шестерная 318 вращаются вместе. Подобным образом, ведомый вал 324 установлен на солнечной шестерне 320, вал 324 и солнечная шестерная 320 вращаются вместе. Ведомые валы 322 и 324 функционально соединены с половинчатыми валами 98 через универсальные соединения или соединения других типов (не показаны), содержащиеся в защитных кожухах 326 и 328 (показаны на Фигуре 7).
[0078] ДОП 302 имеет вторые пластины 330 муфты. Когда пластины 308 и 330 муфты не сжимаются, ДОП 302 не нагружается. Ведомые валы 322 и 324 могут вращаться с одинаковой скоростью или с разной скоростью. Когда оба ведомых вала 322 и 324 вращаются с одинаковой скоростью, они также вращаются вдвоем с той же скоростью, что и кольцевая шестерня 306, несущий элемент 310 и солнечные шестерни 318, 320. В то же время, планетарные шестерни 314 и 316 не вращаются вокруг оси вала 312 (они вращаются лишь вокруг оси кольцевой шестерни 306, следуя движению несущего элемента 310). Когда два ведомых вала 322 и 324 вращаются с разными скоростями, разница вращения солнечных шестерней 318 и 316 обуславливает вращение планетарных шестерней 314 и 316 вокруг оси вала 312. В этом случае, крутящий момент от ведущего вала 90 неравным образом передается на ведомые валы 322 и 324 и, в конечном итоге, на левое и правое колеса 44.
[0079] Активатор 372 может сжимать пластины 308 и 330 муфты. Это сжатие снижает и, как следствие, устраняет разницу скорости вращения между кольцевой шестерней 306 и ведомым валом 324. Если пластины 308 и 330 муфты сжимаются до точки устранения какой-либо разницы скорости вращения между кольцевой шестерней 306 и ведомым валом 324, несущий элемент 310 также вращается с той же скоростью, что и ведомый вал 324. Планетарные шестерни 314 и 316 не могут вращаться вокруг оси вала 312, так что солнечная шестерня 318 и ведомый вал 322 также вращаются с той же скоростью, что и ведомый вал 324. Затем, ДОП 302 эффективным образом блокируется. В случае частичной нагрузки ДОП 302, умеренное сжатие пластин 308 и 330 муфты обуславливает снижение разницы скорости вращения между кольцевой шестерней 306 и ведомым валом 324, не устраняя полностью эту разницу. В этом время ДОП 302 обеспечивает возможность ограниченного проскальзывания колес 44.
[0080] ДОП 302 представляет собой традиционный дифференциал ограниченного проскальзывания типа муфты и является управляемым для обеспечения заранее определенной максимальной разницы скорости вращения между левым и правым передними колесами 44. Предполагается, что в качестве альтернативы, может быть использован любой другой подходящий тип ДОП 302.
[0081] ДОП 302 механическим образом соединен с активатором 372, например, электрическим, гидравлическим или магнитным активатором, который электронным образом управляется блоком 370 управления. Для регулировки разницы скорости вращения между левым и правым передними колесами 44, активатор 372 может изменять сжатие пластин 308 и 330 муфты для изменения степени сцепления или нагрузки ДОП 302. ДОП 302 может быть сцеплен, т.е. нагружен, когда блок 370 управления обнаруживает, что одно из колес 44 проскальзывает.
[0082] По меньшей мере в одной реализации для предотвращения окончательного проскальзывания колес 44, блок 370 управления может управлять ДОП 302 для нагрузки перед фактическим обнаружением проскальзывания колеса. В таком случае можно сказать, что ДОП 302 предварительно нагружен. В контексте настоящего раскрытия, разницы между терминами «нагрузка» и «предварительная нагрузка» в основном относятся к обстоятельствам, при которых блок 370 управления инициирует нагрузку ДОП 302. ДОП 302 функционирует по существу одинаково вне зависимости от того, он нагружен или предварительно нагружен. Применение предварительной нагрузки к ДОП 302 не препятствует дополнительной или повышенной нагрузке ДОП 302 в случае проскальзывания колеса.
[0083] Блок 370 управления может побуждать ДОП 302 функционировать в качестве открытого дифференциала (полностью расцепленного), заблокированного дифференциала (полностью зацепленного) или с любой промежуточной степенью зацепления. Блок 370 управления электрически соединен с датчиками 376, 378 скорости колеса, которые на Фиг. 8 соединены с ведомыми валами 324 и 322. В качестве альтернативы, датчики 376, 378 скорости колеса могут быть соединены с передними колесами 44, с передними половинчатыми валами 98 или с любым другим подходящим компонентом, от которого блок 370 управления принимает сигналы, указывающие на скорость вращения левого и правого передних колес 44.
[0084] Фигура 9 представляет собой вид в поперечном сечении примера конструкции узла дифференциала, показанного на Фигуре 7. Активатор 372 содержит электрический двигатель 288, который приводит в действие набор 276 шестерней. Вращательное движение набора 276 шестерней преобразуется в осевое движение посредством рампы 278 для шариков. Это осевое движение используется для применения давления, генерируемого электрическим двигателем 288, для сжатия пластин 308 и 330 муфты 374. Это сжатие муфты 374 нагружает ДОП 302 для уменьшения относительного проскальзывания между левым и правым половинчатыми валами 98. Достаточное сжатие муфты 374 может эффективным образом заблокировать ДОП 302. Однако в некоторых реализациях даже при максимальном сжатии муфта 374 может проскальзывать в сложных условиях. Следовательно, в зависимости от крутящего момента с ведущего вала 90, применяемого к ДОП 302, и в зависимости от характеристик муфты 374, ДОП 302 может не блокироваться до абсолютной степени. В контексте настоящего раскрытия ДОП 302 считается заблокированным, когда максимальный крутящий момент применяется к муфте 374, хотя в это время между левым и правым половинчатыми валами 98 все еще может присутствовать незначительное проскальзывание. Следовательно, «блокирование ДОП 302» не следует понимать в абсолютном смысле.
[0085] Для предотвращения перегрева электрического двигателя 288 может быть запитан соленоид 382, имеющий зубец 384 на своем конце, так что зубец 384 сцепляется с наибольшей шестерней 386 из набора 276 шестерней, тем самым блокируя набор 276 шестерней, рампу 278 для шариков и муфту 374 в выбранном положении нагрузки. В результате, электрический двигатель 288 больше не должен быть запитан для поддержания нагрузки ДОП 302. В реализации соленоид 382 может быть запитан для блокирования ДОП 302, когда блок 370 управления определяет, что нагрузка была применена по меньшей мере в течение заранее определенной длительности периода времени. Следует заметить, что запитка соленоида 382 требует намного меньшего тока, чем запитка электрического двигателя 288. Отключение запитки соленоид 382 обуславливает его обратный ход, отсоединяя зубец 384 от наибольшей шестерни 386 из набора 276 шестерней и прекращая нагрузку на ДОП 302. В варианте соленоид 382 может быть сконфигурирован таким образом, что его зубец 384 сцепляется с наибольшей шестерней 386 из набора 276 шестерней, когда соленоид 382 не запитан, запитывая соленоид 382, тем самым обуславливая отсоединение набора 276 шестерней и разблокирование муфты 374.
[0086] В реализации максимальное сжатие муфты 374 может быть применено электрическим двигателем 288, набором 276 шестерней и рампой 278 для шариков перед запиткой соленоида 382. В этой же или другой реализации соленоид 382 также может быть запитан для блокирования ДОП 302, когда пользователь вручную активирует тумблерный переключатель 63 для выбора блокирования ДОП 302, как указано датчиком 398 команды пользователя, который информирует блок 370 управления о запросе пользователя на блокирование ДОП 302. В таком случае запрос пользователя на блокирование ДОП 302 необязательно может обусловить максимальную нагрузку ДОП 302 за счет максимального сжатия муфты 374 электрическим двигателем 288, набором 276 шестерней и рампой 278 для шариков перед запиткой соленоида 382.
[0087] Также предполагаются другие реализации узла 300 дифференциала и ДОП 302. Настоящая технология не ограничена конкретной реализацией, проиллюстрированной на Фигурах 7-9. В частности, также предполагается узел дифференциала, который не содержит рампу для шариков или пластины муфты.
Управление ДОП 302 на основе угла поворота транспортного средства 40
[0088] В одном аспекте настоящей технологии представлено управление ДОП 302, соединенным с ведомыми колесами 44 транспортного средства 40, по меньшей мере частично на основе скорости вращения обоих левого и правого ведомых колес 44 транспортного средства 40 и по меньшей мере частично на основе угла поворота. В контексте настоящего раскрытия угол поворота может представлять собой угол руля 58 или угол рычага управления, в зависимости от типа устройства управления поворотом, установленного на транспортном средстве. В транспортных средствах, имеющих так называемые электронные системы поворота, соотношение входа для для руля к углу повернутых колес может варьироваться в соответствии со скоростью транспортного средства и, в некоторых случаях, в соответствии с некоторыми другими факторами.
[0089] Учитывая то, что для внутренних колес 44 и 48 естественным является вращение с меньшей скоростью чем для внешних колес 44 и 48, когда транспортное средство 40 двигается по кривой, в реализации блок 370 управления определяет допустимый диапазон проскальзывания между левым и правым передними колесами 44, допустимый диапазон проскальзывания по меньшей мере частично основан на углу поворота и скорости транспортного средства 40. Это позволяет блоку 370 управления управлять нагрузкой ДОП 302 с помощью более узкого диапазона проскальзывания вместо традиционного широкого диапазона проскальзывания.
[0090] Фигура 10 представляет временные диаграммы, показывающие вариации угла поворота (верхняя диаграмма 400), вариации проскальзывания колеса и диапазон между максимально и минимально допустимым проскальзыванием, вычисляемые блоком 370 управления двигателем (средняя диаграмма 404), и команды управления для нагрузки и/или блокирования ДОП 302 (нижняя диаграмма 430). Для простоты иллюстрации и не ограничивая общий смысл настоящего раскрытия, диаграммы на Фигуре 10 сделаны с учетом постоянной скорости транспортного средства 40, передние колеса 44 которого вращаются со средней скоростью 100 об/мин.
[0091] Верхняя диаграмма 400 иллюстрирует угол 402 поворота, показывающий вращения руля 58 между -360 и +360 градусами, в течение 32-секундного периода времени. Также предусмотрена эквивалентная диаграмма, показывающая угловые вариации передних колес 44, которые поворачиваются за счет действия руля 58, в случае чего будут показаны меньшие угловые диапазоны. Пользователь изначально держит руль 58 в прямом (0 градусов) положении от исходного нулевого времени до примерно 4,5 секунды. После этой точки времени пользователь поворачивает руль для того, чтобы транспортное средство 40 выполнило левый поворот с последующим правым поворотом, другим левым поворотом и так далее. Пунктирной линией 424 выделена исходная точка во времени вступления этого действия от пользователя на других диаграммах Фигуры 10. В целях иллюстрации, пользователь полностью вращает руль 58 между -360 при левых поворотах и +360 градусах при правых поворотах.
[0092] Средняя диаграмма 404 иллюстрирует вариации проскальзывания колеса между левым и правым передними колесами 44 с течением времени. В целях иллюстрации, диаграмма 404 показывает проскальзывание 406 колеса, проиллюстрированное с точки обзора левого переднего колеса. В контексте настоящего изобретения «проскальзывание колеса» определяется как разница скорости вращения двух (2) передних колес 44 транспортного средства 40. В целях иллюстрации, проскальзывание колеса вычисляется при взятии левого колеса 44 в качестве эталона. В результате, положительное значение проскальзывания колеса указывает на то, что левое колесо вращается быстрее чем правое колесо, тогда как отрицательное значение проскальзывания колеса указывает на то, что левое колесо вращается медленнее чем правое колесо. Когда транспортное средство 40 выполняет, например, левый поворот, левое колесо естественным образом вращается медленнее, чем правое колесо, не предполагая никакого фактического проскальзывания между колесом и землей. Таким образом, кривая проскальзывания 406 колеса представляет собой скорость левого колеса минус скорость правого колеса для различных углов поворота.
[0093] Вертикальная ось диаграммы 404 показывает значения проскальзывания колеса между -60 и +60 об/мин. Предполагая, что между колесами и местностью отсутствует какое-либо проскальзывание, внутреннее левое колесо вращается с меньшей скоростью, чем внешнее правое колесо при выполнении левого поворота и, следовательно, проскальзывание колеса является отрицательным для всех углов поворота между 0 и -360. Когда руль поворачивается в противоположном направлении, между углами поворота 0 и +360, левое колесо вращается быстрее, чем правое колесо и, следовательно, проскальзывание колеса является положительным. Без какого-либо проскальзывания между колесами и местностью, кривая для проскальзывания 406 колеса следует ожидаемому проскальзыванию колеса, что естественным образом дает радиус поворота транспортного средства 40, радиус поворота, в свою очередь, зависит от угла поворота. Большой угол поворота приводит к тому, что транспортное средство 40 берет малый радиус поворота, что, в свою очередь, вызывает важное проскальзывание колеса.
[0094] Как проиллюстрировано, кривая для проскальзывания 406 колеса является зубчатой, в основном ввиду шума в измерениях с датчиком 376, 378 скорости колеса, который может быть вызван, например, попаданием колес 44 на бугры или в выбоины на дороге.
[0095] Кривая для проскальзывания 406 колеса представлена для конкретной реализации транспортного средства 40, передние колеса 44 которого вращаются в среднем при 100 об/мин без проскальзывания относительно земли. Для этой реализации ожидаемое проскальзывание колеса при максимальном углу поворота +/-360 градусов составляет 30 об/мин, при этом внутреннее переднее колесо 44 вращается при 85 об/мин, тогда как внешнее переднее колесо 44 вращается при 115 об/мин, среднее значение скорости передних колес 44 составляет 100 об/мин. Иначе говоря, в этой конкретной реализации транспортное средство 40 имеет коэффициент проскальзывания 30%, который представляет собой фиксированное значение, определенное как соотношение между значением проскальзывания колеса при максимальном углу поворота и средней скоростью колеса. Для того же транспортного средства 40 при средней скорости колеса 200 об/мин, ожидаемое проскальзывание колеса при максимальном углу поворота составляет, таким образом, 60 об/мин. Для другого транспортного средства коэффициент проскальзывания может быть другим в зависимости от передаточного числа руля в рулевой системе этого транспортного средства. Также, в варианте реализации другое транспортное средство может иметь руль, который может вращаться на более или менее чем +/-360 градусов. Например, руль может поворачиваться более чем на один полный поворот для поворота колес.
[0096] Диаграмма 404 также показывает максимально допустимое проскальзывание 408 колеса и минимально допустимое проскальзывание 410 колеса. Выражаясь в целом, максимально допустимое проскальзывание 408 колеса имеет пиковое значение, когда левое колесо находится с внешней стороны кривой (правый поворот), тогда как минимально допустимое проскальзывание 410 колеса имеет пиковое (отрицательное) значение, когда левое колесо находится с внутренней стороны кривой (левый поворот). Вместе, максимально и минимально допустимое проскальзывание 408 и 410 колеса определяет, для заданного угла поворота, допустимый диапазон проскальзывания для передних колес 44. Проскальзывание 406 колеса может варьироваться между этими значениями перед вмешательством блока 370 управления в виде начала нагрузки ДОП 302.
[0097] Блок 370 управления использует информацию об угле поворота с датчика 390 угла поворота для управления узлом 300 дифференциала ограниченного проскальзывания. Блок 370 управления определяет ожидаемое проскальзывание колеса, которое, как правило, дает радиус поворота транспортного средства 40, радиус поворота, в свою очередь, зависит от угла поворота. Блок 370 управления прибавляет и вычитает предел проскальзывания к и из ожидаемого проскальзывания колеса, соответственно, для расширения допустимого диапазона относительного проскальзывания между передними колесами 44. Предел проскальзывания может быть фиксированным. В качестве альтернативы, проскальзывание колеса может варьироваться в соответствии со скоростью вращения передних колес 44. Использование предела проскальзывания предотвращает избыточную реакцию узла 300 дифференциала ограниченного проскальзывания, когда разница скорости вращения передних колес 44 находится в пределах допустимого диапазона проскальзывания. Предел проскальзывания колеса определяется блоком 370 управления. В реализации предел проскальзывания может быть выбран по меньшей мере частично, так что шум из измерений датчиков 376, 378 скорости колеса не вызывает случайное взаимодействие ДОП 302. На иллюстрации на Фигуре 10 одинаковый предел проскальзывания используется для определения максимально и минимально допустимого проскальзывания 408 и 410 колеса. Также предполагается использование разных пределов проскальзывания для любого заданного угла поворота и/или для определения диапазонов допустимого проскальзывания колеса для внутренних и внешних колес 44. Для вычисления максимально допустимого проскальзывания 408 колеса предел проскальзывания прибавляется к ожидаемому проскальзыванию колеса при текущем угле поворота для заданной скорости вращения передних колес 44. Для вычисления минимально допустимого проскальзывания 410 колеса предел проскальзывания вычитается из ожидаемого проскальзывания колеса при текущем угле поворота для заданной скорости вращения передних колес 44.
[0098] Фигура 11 представляет собой графическое представление предела проскальзывания (верхняя диаграмма 418), варьирующегося в зависимости от скорости вращения передних колес 44 транспортного средства 40 (нижняя диаграмма 414). Нижняя диаграмма 414 показывает скорость 416 передних колес 44 транспортного средства 40 в об/мин. Верхняя диаграмма 418 показывает предел 420 проскальзывания для колес 44 и уровень шума 422 от измерений датчиков 376, 378 скорости колеса. По мере повышения скорости 416, уровень шума 422 также повышается. По этой причине, предел 420 проскальзывания, используемый при определении максимально и минимально допустимого проскальзывания 408 и 410 колеса, по меньшей мере частично зависит от скорости 416 транспортного средства, так что предел 420 проскальзывания остается больше, чем уровень шума 422 в большинстве обстоятельств. Взаимосвязь между пределом 420 проскальзывания и скоростью 416 передних колес 44 может быть линейной или нелинейной. В реализации предел 420 проскальзывания 25 об/мин соответствует средней скорости передних колес 44, равной 100 об/мин. В реализации блок 370 управления хранит таблицу соответствия проскальзывания (иногда называемую справочной таблицей) с отношениями между значениями предела 420 проскальзывания и скоростью 416 передних колес 44. Взаимосвязь между углом поворота и углом поворачиваемых колес может быть линейной или нелинейной. Однако соотношение входа для руля к углу поворачиваемых колес известно всегда благодаря контроллеру электронной системы поворота.
[0099] Возвращаясь теперь к Фигуре 10, блок 370 управления определяет скорость передних колес 44 путем усреднения измерений с датчиков 376, 378 скорости колеса. Измерение угла поворота выдается на блок 370 управления датчиком 390 угла поворота. Примерно до 4,5 секунд (пунктирная линия 424) руль 58 удерживается в прямом положении, а ожидаемое проскальзывание колеса составляет ноль об/мин. Максимально и минимально допустимое проскальзывание 408, 410 колеса в этом время, соответственно, равняется пределу 25 об/мин выше и ниже значения ожидаемого проскальзывания колеса, этот предел проскальзывания представлен для передних колес 44, вращающихся в среднем при 100 об/мин. В 4,5 секунды пользователь начинает поворачивать руль 58 сначала влево, а затем вправо, и так далее. Блок 370 управления использует измерения с датчика 390 угла поворота руля для модификации максимально и минимально допустимого проскальзывания 408 и 410 колеса, которое может быть допустимо перед применением нагрузки к ДОП 302. В проиллюстрированном примере примерно в 11,5 секунды (пунктирная линия 426) руль 58 поворачивается вправо на 360 градусов, что обуславливает разницу 30 об/мин между скоростью передних колес 44 с учетом текущей скорости колеса 100 об/мин и коэффициент проскальзывания 30% транспортного средства 40. Левое колесо 44 с внешней стороны кривой вращается с большей скоростью, тогда как правое колесо 44 с внутренней стороны кривой вращается с меньшей скоростью (в целом в точке 428 на кривой 406 проскальзывания колеса). В это время минимально допустимое проскальзывание 410 колеса составляет +5 об/мин (30-25 об/мин), тогда как максимально допустимое проскальзывание 408 колеса составляет +55 об/мин (30+25 об/мин). Иначе говоря, левое колесо 44, являющееся в то же время внешним колесом, естественным образом будет вращаться на 30 об/мин быстрее, чем внутреннее правое колесо 44, находясь на не скользкой местности. При заданном допустимом диапазоне проскальзывания, левое колесо 44 может вращаться даже быстрее, до 55 об/мин быстрее чем внутреннее правое колесо 44, перед тем, как блок 370 управления начнет применять нагрузку к ДОП 302. В то же время, положительное значение минимально допустимого проскальзывания 410 колеса подразумевает, что блок 370 управления будет применять нагрузку к ДОП 302, если внешнее левое колесо 44 вращается менее чем на 5 об/мин быстрее чем внутреннее правое колесо 44. Значение 5 об/мин вычисляется как ожидаемое проскальзывание колеса при текущем угле рулевого устройства (30 об/мин) минус предел проскальзывания, значение которого составляет 25 об/мин. Разница между максимально допустимым проскальзыванием 408 колеса и минимально допустимым проскальзыванием 410 ножа поддерживается постоянной на 50 об/мин, это значение отражает предел проскальзывания 25 об/мин, применяемый с обеих сторон ожидаемого проскальзывания колеса, при скорости колеса 100 об/мин.
[00100] Нижняя диаграмма 430 на Фигуре 10 показывает команды от блока 370 управления на нагрузку и последующую разгрузку ДОП 302. Эти команды генерируются блоком 360 управления, когда проскальзывание 406 колеса выходит за пределы, определенные максимально и минимально допустимым проскальзыванием 408 и 410 колеса. ДОП 302 изначально не нагружен (команда ВЫКЛ). В настоящем примере проскальзывание 406 колеса превышает минимально допустимое проскальзывание 410 колеса примерно в 15,5 секунды и, в ответ, блок 370 управления отправляет команду управления на ДОП 302 на 16-секундной отметке (пунктирная линия 432; команда ВКЛ). Блок 370 управления изначально применяет нагрузку к ДОП 302 путем запитки электрического двигателя 288. Блок 370 управления может дополнительно запитывать соленоид 382 для блокирования ДОП 302. В реализации блок 370 управления может определять уровень нагрузки, подлежащей применению к ДОП 302, на основе одного или более из множества параметров, в том числе, без ограничения, крутящего момента, обеспечиваемого двигателем 62, положения переключателя 60, выбирающего передаточное отношение ведущего моста 66 в блоке с коробкой передач, величины проскальзывания 406 колеса и величины избытка проскальзывания 406 колеса относительно максимально и минимально допустимого проскальзывания 408, 410 колеса. Блок 370 управления также может определять то, следует ли блокировать ДОП 302 или нет, на основе комбинации этих параметров.
[00101] Как проиллюстрировано, начиная с 16-секундной отметки, ДОП 302 достаточно нагружен, возможно заблокирован, для того, чтобы снизить проскальзывание 406 колеса по существу до нуля об/мин. В то же время, блок 370 управления адаптирует свое вычисление максимально и минимально допустимого проскальзывания 408 и 410 колеса. Перед обнаружением того, что проскальзывание 406 колеса выходит за пределы, определенные максимально и минимально допустимым проскальзыванием 408 и 410 колеса, максимально допустимое проскальзывание 408 колеса, вычисленное в соответствии с углом поворота, составляет -5 об/мин (точка 429), а минимально допустимое проскальзывание 410 колеса, вычисленное в соответствии с углом поворота, составляет -55 об/мин. ДОП 302 нагружается и, возможно, блокируется блоком 370 управления. Таким образом, фактическое проскальзывание колеса снижается по существу до нуля об/мин.
[00102] Предполагая, что блок 370 управления все еще будет определять максимально допустимое проскальзывание 408 колеса на основе угла поворота способом, который описан ранее, максимально допустимое проскальзывание 408 колеса будет равняться -5 об/мин в этот момент времени, и блок 370 управления будет управлять применением нагрузки к ДОП 302, поскольку проскальзывание колеса с нулевым об/мин больше, чем -5 об/мин. ДОП 302 уже нагружен, это действие блока 370 управления будет избыточным. Следовательно, блок 370 управления модифицирует свое вычисление максимально допустимого проскальзывания 408 колеса способом, который выражен в настоящем документе ниже. В то же время, блок 370 управления не будет действовать при минимально допустимом проскальзывании 410 колеса, вычисленном с учетом угла поворота, поскольку при -55 об/мин это минимально допустимое проскальзывание колеса не будет превышено. В это время нет необходимости в модификации вычисления минимально допустимого проскальзывания 410 колеса.
[00103] Когда ДОП 302 нагружен, блок 370 управления обновляет максимально допустимое проскальзывание 408 колеса путем выбора наибольшего из: (а) суммы ожидаемого проскальзывания колеса и предела проскальзывания для текущей скорости колеса; и (b) предела проскальзывания для текущей скорости колеса. В настоящем примере, как показано на диаграмме 404, максимально допустимое проскальзывание колеса 408 становится равным пределу проскальзывания, начиная с 16-секундной отметки. Блок управления также обновляет минимально допустимое проскальзывание 410 колеса путем выбора меньшего (наиболее отрицательного) из: (а) ожидаемого проскальзывания колеса минус предел проскальзывания для текущей скорости колеса; и (b) предела проскальзывания для текущей скорости колеса, выражаемого отрицательным числом (т.е. ноль минус предел проскальзывания). В настоящем примере в этом случае минимально допустимое проскальзывание 410 колеса остается без изменений, поскольку оно ниже чем предел проскальзывания, выражаемый отрицательным числом. В результате, максимально допустимое проскальзывание 408 колеса изменяется блоком 370 управления до 25 об/мин (0+25 об/мин), это значение максимально допустимого проскальзывания 408 колеса является таким же, как и когда руль 58 удерживается в прямом положении (нулевой угол поворота). Без этого изменения вычисления, кривая максимально допустимого проскальзывания 408 колеса может пересекаться с фактическим проскальзыванием 406 колеса, которое в этом время по существу равняется нулю об/мин. В примере, как проиллюстрировано на Фигуре 10, минимально допустимое проскальзывание 410 колеса продолжает вычисляться на основе фактического угла руля 58, а проскальзывание 406 колеса и минимально допустимое проскальзывание 410 колеса не пересекаются между собой.
[00104] От 16-секундной отметки (пунктирная линия 432) блок 370 управления отслеживает проскальзывание 406 колеса и может постепенно увеличивать или уменьшать нагрузку на ДОП 302 в зависимости от синхронизации передних колес 44 и, возможно, в зависимости от некоторых из указанных выше параметров, используемых блоком 370 управления для определения уровня нагрузки, подлежащей применению к ДОП 302. В 18 секунд (пунктирная линия 434) проскальзывание 406 колеса находится в пределах максимально и минимально допустимого проскальзывания 408 и 410 колеса, а уровень нагрузки, определенный блоком 370 управления, равняется или близок к нулю. Блок 370 управления удаляет команду нагрузки, применяемую к ДОП 302, и повторно вычисляет максимально допустимое проскальзывание 408 колеса, используя способ вычисления, использованный перед 16-секундной отметкой, в котором максимально и минимально допустимое проскальзывание 408 и 410 колеса вычисляется в соответствии с углом поворота и с пределом проскальзывания, последний необязательно зависит от скорости вращения колес 44.
[00105] Фигура 23 представляет собой блок-диаграмму 1200, показывающую внутренние операции блока 370 управления для определения максимально и минимально допустимого проскальзывания 408 и 410 колеса, согласно реализации. Блок-диаграмма 1200 показывает три (3) ввода, которые могут быть использованы блоком 370 управления для определения максимально и минимально допустимого проскальзывания 420 и 410 колеса. В реализации предполагается, что это определение может быть основано на дополнительных вводах. Одним таким вводом является средняя скорость 1202 вращения передних колес 44, выражаемая в об/мин. Другим вводом является угол 1204 поворота, выдаваемый датчиком 390 угла поворота, который выражается в градусах. Угол 1204 поворота может представлять собой угол руля 58 или угол рычага управления. Дополнительным вводом является бинарный статус 1206 ДОП 302. Бинарный статус 1206 задается, если ДОП 302 нагружен и/или заблокирован. В противном случае, бинарный статус 1206 сбрасывается.
[00106] Средняя скорость 1202 вращения колеса применяется к таблице соответствия проскальзывания, которая проиллюстрирована в виде блока 1208 на Фигуре 28. Таблица соответствия проскальзывания выдает предел 1210 проскальзывания. В примере на Фигуре 23 предел 1210 проскальзывания имеет положительное значение, примененное к первому сумматору 1212 и к множителю 1214, который имеет прирост -1, для получения отрицательной версии 1216 предела 1210 проскальзывания, эта отрицательная версия 1216 применяется ко второму сумматору 1218.
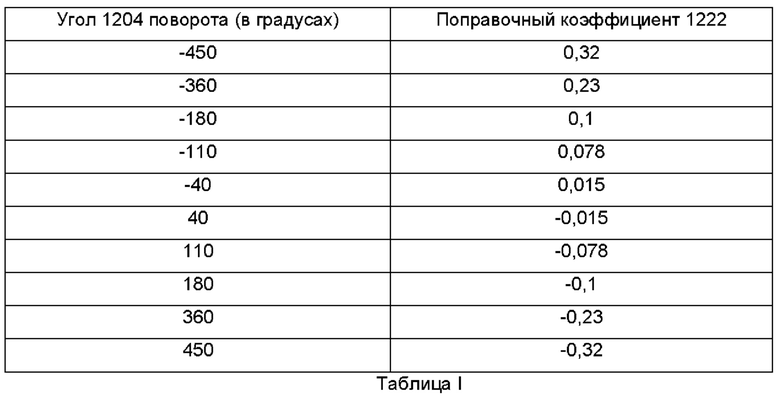
[00107] Угол 1204 поворота применяется к блоку 1220, который проиллюстрирован в виде графического представления таблицы соответствия угла поворота, которая обеспечивает поправочный коэффициент 1222 в зависимости от угла 1204 поворота. Таблица I является неограничивающим примером таблицы соответствия угла поворота.
[00108] Блок 1220 выдает поправочный коэффициент 1222. Ввиду того, что угол 1204 поворота может иметь положительное или отрицательное значение, поправочный коэффициент 1222 также может иметь положительное или отрицательное значение. Множитель 1224 умножает среднюю скорость 1202 вращения колеса на поправочный коэффициент 1222 для выдачи ожидаемого проскальзывания 1226 колеса. Ожидаемое проскальзывание 1226 колеса применяется к вводам первого переключателя 1228 и второго переключателя 1230. Можно заметить, что ожидаемое проскальзывание 1226 колеса также может иметь положительное или отрицательное значение.
[00109] Угол 1204 поворота также применяется к первому и второму компараторам 1232 и 1234. Первый компаратор 1232 выдает логическое значение 1236, например, логическую 1, когда угол поворота меньше или равняется нулю градусов. Второй компаратор 1234 выдает логическое значение 1238, например, логическую 1, когда угол поворота больше или равняется нулю градусов. Бинарный статус 1206 ДОП 302 применяется к первому и второму блокам 1240 и 1242 «И» вместе с, соответственно, логическими значениями 1236 и 1238.
[00110] Если бинарный статус 1206 ДОП 302 не задан, выводы обоих блоков «И» сбрасываются, например, выдавая логические 0, применяемые к переключателям 1228 и 1230. В этом случае, оба вывода 1244 и 1246 переключателей 1228 и 1230 заданы на ожидаемое проскальзывание 1226 колеса. Сумматор 1212 суммирует ожидаемое проскальзывание 1226 колеса и предел 1210 проскальзывания для выдачи максимально допустимого проскальзывания 408 колеса. Сумматор 1218 суммирует ожидаемое проскальзывание колеса 1226 и отрицательную версию 1216 предела 1210 проскальзывания для выдачи минимально допустимого проскальзывания 410 колеса.
[00111] Если бинарный статус 1206 ДОП 302 задан, ДОП 302 нагружается или блокируется в это время, при условии, что угол поворота не равняется нулю градусов, один из блоков 1240 и 1242 «И» выдает логическую 1. Если угол 1204 поворота отрицательный, задается логическое значение 1236 и блок 1240 «И» выдает логическую 1, применяемую к переключателю 1228. Вывод 1244 переключателя 1228 задан на фиксированное значение 1248, например, равняется 0 об/мин. Это значение прибавляется к пределу 1210 проскальзывания и максимально допустимое проскальзывание 408 колеса становится равным пределу 1210 проскальзывания. Пример этой ситуации показан на Фигуре 10 между пунктирными линиями 432 и 434, когда угол 1204 поворота отрицательный и ДОП 302 заблокирован. В то же время, логическое значение 1238 из компаратора 1234 сбрасывается, поскольку угол 1204 поворота не превышает ноль или равняется ему. Блок 1242 «И» выдает логический 0, применяемый к переключателю 1230. Вывод 1246 переключателя 1230 не меняется и минимально допустимое проскальзывание 410 колеса остается равным сумме ожидаемого проскальзывания 1226 колеса и отрицательной версии 1216 предела 1210 проскальзывания.
[00112] Если бинарный статус 1206 ДОП 302 задан и если угол 1204 поворота положительный, задается логическое значение 1238 и блок 1242 «И» выдает логическую 1, применяемую к переключателю 1230. Вывод 1246 переключателя 1230 задан на фиксированное значение 1250, например, равняется 0 об/мин. Это значение прибавляется к отрицательной версии 1216 предела 1210 проскальзывания и минимально допустимое проскальзывание 410 колеса становится равным отрицательной версии 1216 предела 1210 проскальзывания. Пример этой ситуации показан на Фигуре 10 между пунктирными линиями 436 и 438, когда угол 1204 поворота положительный и ДОП 302 заблокирован. В то же время, логическое значение 1236 из компаратора 1232 сбрасывается, поскольку угол 1204 поворота не меньше нуля или равняется ему. Блок 1240 «И» выдает логический 0, применяемый к переключателю 1228. Вывод 1244 переключателя 1228 не меняется и максимально допустимое проскальзывание 408 колеса остается равным сумме ожидаемого проскальзывания 1226 колеса и предела 1210 проскальзывания.
[00113] Если бинарный статус 1206 ДОП 302 задан и угол поворота равняется нулю градусов, каждый из блоков 1240 и 1242 «И» выдает логическую 1. Поскольку ожидаемое проскальзывание 1226 колеса составляет 0 об/мин или близко к нему в эти моменты времени, все выбираемые вводы переключателей 1228 и 1230 эквивалентным образом задаются на 0 об/мин и, следовательно, выводы блоков 1240 и 1242 «И» не оказывают никакого влияния на вычисления максимально и минимально допустимого проскальзывания 408 и 410 колеса.
[00114] Возвращаясь к Фигуре 10, блок 370 управления может определить подходящее время для удаления нагрузки на ДОП 302 в соответствии с множеством параметров. В варианте блок 370 управления может удалить нагрузку, когда проскальзывание 406 колеса оставалось в пределах допустимого диапазона, определенного максимально и минимально допустимым проскальзыванием 420 и 410 колеса, в течение заранее определенного периода времени. В том же или другом варианте уровень нагрузки может постепенно снижаться блоком 370 управления, уровень по меньшей мере частично основан на величине избытка текущего проскальзывания колеса относительно диапазона между максимально и минимально допустимым проскальзыванием 408 и 410 колеса.
[00115] Например, Фигура 13 представляет собой логическую диаграмму, показывающую детали способа применения нагрузки к дифференциалу ограниченного проскальзывания. В последовательности 450 операция 452 включает отслеживание сигналов и измерений с датчиков 376, 378 скорости колеса для конечного обнаружения того, что проскальзывание 406 колеса превышает допустимый диапазон проскальзывания, определенный максимально и минимально допустимым проскальзыванием 408 и 410 колеса. После такого обнаружения блок 370 управления управляет нагрузкой ДОП 302 на операции 454. Ссылаясь вновь на Фигуру 9, управление ДОП 302 для снижения текущего проскальзывания 406 колеса осуществляется путем нагрузки ДОП 302. С этой целью, муфта 374 ДОП 302 сжимается для снижения разницы скорости вращения ведомых валов 322 и 324, которые функционально соединены с половинчатыми валами 98, а также с левым и правым ведомыми колесами 44. Сжатие муфты 374 ДОП 302 осуществляется электрическим двигателем 288, который вращает набор 276 шестерней, который, в свою очередь, преобразует его вращательное движение в осевое движение рампы 278 для шариков для применения крутящего момента TqDiff к муфте 374.
[00116] Исходное значение Tq крутящего момента применяется к муфте 374. Исходное значение Tq крутящего момента может быть, например, пропорционально крутящему моменту, обеспечиваемому двигателем 62. Если остается избыточное проскальзывание колеса, крутящий момент TqDiff увеличивается на прирост Δ_up1 на операции 456. Операция 456 может повторяться до тех пор, пока текущее проскальзывание 406 колеса не вернется в пределы допустимого диапазона проскальзывания. Как только текущее проскальзывание 406 колеса вернулось в пределы допустимого диапазона проскальзывания, на операции 458 постепенно снижается крутящий момент TqDiff, применяемый к муфте 374, на Δ_down шагов. Если проскальзывание 406 колеса увеличивается и вновь попадает за пределы допустимого диапазона проскальзывания, крутящий момент TqDiff увеличивается на прирост Δ_up2 на операции 460, после чего последовательность возвращается к операции 456. Приросты Δ_up1 и Δ_up2 могут иметь равные или неравные значения. Когда крутящий момент TqDiff попадает на ноль, проскальзывание 406 колеса находится за пределами допустимого диапазона проскальзывания, отслеживание проскальзывания возобновляется на операции 452.
[00117] Предполагаются другие способы вычисления крутящего момента TqDiff, применяемого к муфте 374. Крутящий момент может быть вычислен, например, пропорционально разнице между текущим проскальзыванием 406 колеса и максимально и минимально допустимым проскальзыванием 408 и 410 колеса.
[00118] Возвращаясь к Фигуре 10, проскальзывание 406 колеса еще раз выходит за пределы на 20 секундах (пунктирная линия 436), при этом руль 58 теперь повернут вправо. Блок 370 управления отправляет команду управления на нагрузку ДОП 302. В результате, ДОП 302 становится достаточно нагружен и, возможно, заблокирован для уменьшения проскальзывания 406 колеса по существу до нуля об/мин. В то же время, блок 370 управления адаптирует свое вычисление максимально и минимально допустимого проскальзывания 408 и 410 колеса. Перед обнаружением того, что проскальзывание 406 колеса выходит за пределы, определенные максимально и минимально допустимым проскальзыванием 408 и 410 колеса, максимально допустимое проскальзывание 408 колеса, вычисленное в соответствии с углом поворота, составляет примерно 55 об/мин, а минимально допустимое проскальзывание 410 колеса, вычисленное в соответствии с углом поворота, составляет примерно +5 об/мин (точка 437). На 20-секундной отметке блок 370 управления обновляет максимально допустимое проскальзывание 408 колеса путем выбора наибольшего из: (а) суммы ожидаемого проскальзывания колеса и предела проскальзывания для текущей скорости колеса; и (b) предела проскальзывания для текущей скорости колеса. В настоящем примере, как показано на диаграмме 404, максимально допустимое проскальзывание 408 колеса остается без изменений, поскольку оно больше, чем предел проскальзывания. Блок управления также обновляет минимально допустимое проскальзывание 410 колеса путем выбора меньшего (наиболее отрицательного) из: (а) ожидаемого проскальзывания колеса минус предел проскальзывания для текущей скорости колеса, (b) нуля минус предел проскальзывания для текущей скорости колеса. В настоящем примере минимально допустимое проскальзывание 410 колеса становится равным пределу проскальзывания, выраженному в отрицательной начальной точке в 20-секундной отметке. В результате, минимально допустимое проскальзывание 410 колеса изменяется блоком 370 управления до -25 об/мин (0-25 об/мин) также, как и когда руль 58 удерживается в прямом положении (нулевой угол поворота). Без этого изменения вычисления, кривая минимально допустимого проскальзывания 410 колеса может пересекаться с фактическим проскальзыванием 406 колеса, которое в этом время по существу равняется нулю об/мин. В примере на Фигуре 10 максимально допустимое проскальзывание 408 колеса продолжает вычисляться на основе фактического угла руля 58, а проскальзывание 406 колеса и максимально допустимое проскальзывание 408 колеса не пересекаются между собой.
[00119] От 20-секундной отметки (пунктирная линия 436) блок управления отслеживает проскальзывание 406 колеса и может постепенно ослаблять нагрузку на ДОП 302. В 22,5 секунды (пунктирная линия 438) проскальзывание 406 колеса находится в пределах максимально и минимально допустимого проскальзывания 408 и 410 колеса, а уровень нагрузки, определенный блоком 370 управления, равняется или близок к нулю. Блок 370 управления удаляет команду нагрузки, применяемую к ДОП 302, и повторно вычисляет минимально допустимое проскальзывание 410 колеса в соответствии с углом поворота.
[00120] Проскальзывание 406 колеса превышает максимально допустимое проскальзывание 408 колеса вновь на 24,5 секундах (пунктирная линия 440), руль 58 в этом время повернут влево. Блок 370 управления вновь отправляет команду управления для нагрузки ДОП 302, необязательно дополнительно блокируя ДОП 302. В результате, ДОП 302 становится достаточно нагружен по существу для уменьшения проскальзывания 406 колеса до нуля об/мин. В то же время, блок 370 управления адаптирует свое вычисление максимально и минимально допустимого проскальзывания 408 и 410 колеса. Перед обнаружением того, что проскальзывание 406 колеса выходит за пределы, определенные максимально и минимально допустимым проскальзыванием 408 и 410 колеса, максимально допустимое проскальзывание 408 колеса, вычисленное в соответствии с углом поворота, составляет примерно -5 об/мин, а минимально допустимое проскальзывание 410 колеса, вычисленное в соответствии с углом поворота, составляет примерно -55 об/мин. Блок 370 управления обновляет максимально допустимое проскальзывание 408 колеса путем выбора наибольшего из: (а) суммы ожидаемого проскальзывания колеса и предела проскальзывания для текущей скорости колеса; и (b) предела проскальзывания для текущей скорости колеса. В настоящем примере максимально допустимое проскальзывание 408 колеса становится равным пределу проскальзывания, начиная в 24,5-секундной отметке. Блок управления также обновляет минимально допустимое проскальзывание 410 колеса путем выбора меньшего (наиболее отрицательного) из: (а) ожидаемого проскальзывания колеса минус предел проскальзывания для текущей скорости колеса; и (b) нуля минус предел проскальзывания для текущей скорости колеса. В настоящем примере минимально допустимое проскальзывание 410 колеса остается без изменений в 24,5-секундной отметке, поскольку оно меньше чем предел проскальзывания, выраженный отрицательным значением. В результате, максимально допустимое проскальзывание 408 колеса изменяется блоком 370 управления до 25 об/мин (0+25 об/мин) также, как и когда руль 58 удерживается в прямом положении (нулевой угол поворота). Минимально допустимое проскальзывание 410 колеса продолжает вычисляться на основе текущего угла руля 58.
[00121] Пользователь продолжает поворачивать руль 58. Примерно на 27 секундах (пунктирная линия 442) руль 58 поворачивается вправо и левое колесо становится внешним колесом. Блок 370 управления продолжает выбирать максимально допустимое проскальзывание 408 колеса как наибольшее из максимально допустимого проскальзывания колеса, вычисленного в соответствии с текущим углом поворота, и предела проскальзывания. В 27-секундной отметке максимально допустимое проскальзывание 408 колеса начинает становиться больше, чем предел проскальзывания. Блок 370 управления также продолжает выбирать минимально допустимое проскальзывание 410 колеса как наименьшего (наиболее отрицательного) из: (а) минимально допустимого проскальзывания колеса, вычисленного в соответствии с текущим углом поворота; и (b) предела проскальзывания, вычисленного отрицательным значением. В этом случае минимально допустимое проскальзывание 410 колеса становится равным пределу проскальзывания, выраженному в отрицательной начальной точке в 27-секундной отметке.
[00122] Блок 370 управления может выдавать команду для нагрузки ДОП 302 в ответ на другие ситуации или условия езды транспортного средства, например, в ответ на команду пользователя о блокировании ДОП 302. Таким образом, ДОП 302 может быть нагружен даже если в это время проскальзывание 406 колеса может находиться в пределах диапазона между максимально и минимально допустимым проскальзыванием 408 и 410 колеса. Вне зависимости от причины нагрузки ДОП 302, в реализации блок 370 управления может выбирать максимально допустимое проскальзывание 408 колеса как наибольшее из: (а) суммы ожидаемого проскальзывания колеса и предела проскальзывания для текущей скорости колеса; и (b) предела проскальзывания, также выбирая минимально допустимое проскальзывание 410 колеса как наименьшее (наиболее отрицательное) из: (а) ожидаемого проскальзывания колеса минус предел проскальзывания для текущей скорости колеса; и (b) нуля минус предел проскальзывания для текущей скорости колеса, всякий раз, когда ДОП 302 нагружен.
[00123] Рассматривая среднюю диаграмму 404, можно увидеть, что традиционный дифференциал ограниченного проскальзывания, который не сконфигурирован для реагирования на угол поворота транспортного средства 40, а сконфигурирован для обеспечения фиксированного предела проскальзывания колеса между значениями +55 об/мин и -55 об/мин (пунктирные линии 444 и 446 соответственно), будет работать следующим образом точках 429 и 437 в 16-секундной отметке и 20-секундной отметке, соответственно. В случае, когда проскальзывание колеса превышает границы +/-55 об/мин в эти моменты времени, традиционный дифференциал ограниченного проскальзывания может быть нагружен и/или заблокирован для возврата проскальзывания колеса примерно в ноль об/мин. Однако традиционный дифференциал ограниченного проскальзывания не будет реагировать, как это делает ДОП 302, в 24,5-секундной отметке (пунктирная линия 440), поскольку проскальзывание колеса все еще будет находиться в пределах границ +/-55 об/мин. Иначе говоря, традиционный дифференциал ограниченного проскальзывания будет намного медленнее реагировать на появление проскальзывания колеса чем настоящий ДОП 302.
[00124] Следует понимать, что Фигура 10 и описание к ней относятся к проскальзыванию колеса как разнице между скоростью левого колеса минус скорость правого колеса, приводя к получению отрицательных значений проскальзывания колеса, когда левое колесо вращается медленнее, чем правое колесо. Настоящая технология также может быть описана применительно к значениям проскальзывания колеса для правого колеса, в случае чего будет получено положительное значение проскальзывания колеса, когда левое колесо вращается медленнее, чем правое колесо. В таком случае настоящая иллюстрация будет модифицирована в части того, что средняя диаграмма 404 будет перевернута, так что кривая для проскальзывания 406 колеса переместится в направлении положительных значений проскальзывания колеса, когда угол 402 поворота перемещается в направлении отрицательных значений. Настоящий ДОП 302 и блок 370 управления в действительности реагируют на различия между скоростями левого и правого ведомых колес, не задавая приоритет какому-либо из этих колес.
[00125] Фигуры 12а и 12b представляют собой логическую диаграмму, показывающую операции способа управления ДОП 302 на основе угла поворота транспортного средства 40. Последовательность 500 будет понята наилучшим образом при рассмотрении Фигур 12а и 12b вместе с Фигурой 23. Последовательность 500 содержит множество операций, которые могут быть выполнены в меняющемся порядке, некоторые из операций, возможно, выполняются одновременно, некоторые из операций являются необязательными. Последовательность 500 может быть реализована в транспортном средстве, например, транспортном средстве 40. Транспортное средство 40 имеет рулевое устройство, например, руль 58. В качестве альтернативы, в транспортном средстве в качестве рулевого устройства может быть реализован рычаг управления. Дифференциал ограниченного проскальзывания (ДОП), например, ДОП 302, соединен с половинчатыми валами 98 транспортного средства 40. Левое и правое ведомые колеса, такие как передние колеса 44, функционально соединены с ДОП 302 посредством половинчатых валов 98.
[00126] В последовательности 500 операция 510 включает определение скоростей вращения левого и правого ведомых колес 44. Текущее проскальзывание 406 колеса вычисляется на операции 515 как разница между скоростями вращения левого и правого ведомых колес 44. Проскальзывание 406 колеса может быть вычислено как скорость левого колеса минус скорость правого колеса или как скорость правого колеса минус скорость левого колеса. Операция 520 включает определение средней скорости 1202 вращения левого и правого ведомых колес 44. Угол 1204 поворота определяется на операции 525. Операция 530 включает применение текущего угла 1204 поворота к таблице соответствия угла поворота (Таблица I) для получения поправочного коэффициента 1222 и умножение поправочного коэффициента 1222 на среднюю скорость 1202 вращения для определения ожидаемого проскальзывания 1226 колеса. Предел 1210 проскальзывания выбирается на операции 535 путем применения средней скорости 1202 вращения колеса к таблице соответствия проскальзывания, которая является представлением диаграмм 414 и 418 в блоке 370 управления.
[00127] На операции 540 блок 370 управления определяет то, нагружен ли в настоящий момент ДОП 302 или нет, и задает или сбрасывает бинарный статус 1206 ДОП 302 соответствующим образом. Если бинарный статус 1206 не задан, переключатель 1228 обеспечивает возможность вычисления максимально допустимого проскальзывания 408 колеса на операции 545 путем прибавления предела 1210 проскальзывания к ожидаемому проскальзыванию 1210 колеса в сумматоре 1212. Также, если бинарный статус 1206 не задан, переключатель 1230 обеспечивает возможность вычисления минимально допустимого проскальзывания 410 колеса на операции 550 путем вычитания предела 1210 проскальзывания из ожидаемого проскальзывания 1226 колеса, сумматор 1218 эффективным образом прибавляет ожидаемое проскальзывание 1226 колеса к отрицательной версии 1216 предела 1210 проскальзывания.
[00128] Если на операции 540 ДОП 302 нагружен, бинарный статус 1206 задается и один из блоков 1240 и 1242 «И» выдает логическую 1 в зависимости от угла 1204 поворота. Как отражено в приведенном выше описании к Фигуре 23, выводы блоков 1240 и 1242 «И» соответствующим образом применяются к переключателям 1228 и 1230, делая так, что выводы 1244 и 1246 переключателей 1228 и 1230 равняются ожидаемому проскальзыванию 1226 колеса или фиксированным значениям 1248 и 1250, оба из которых равны 0 об/мин. Если, например, угол 1204 поворота отрицателен (логическое значение 1236 задано) и ДОП 302 нагружен, делая так, что бинарный статус 1206 задается, блок 1240 «И» выдает логическую 1, делая так, что вывод 1244 переключателя 1228 задается на 0 об/мин. В это время, поскольку угол 1204 поворота отрицателен, ожидаемое проскальзывание 1226 колеса также является отрицательным. Следовательно, когда бинарный статус 1206 задан, вывод 1244 переключателя 1228 больше, чем ожидаемое проскальзывание 1226 колеса или 0 об/мин. Этот вывод 1244 прибавляется к пределу 1210 проскальзывания сумматором 1212. В результате, максимально допустимое проскальзывание 408 колеса вычисляется на операции 555 как наибольшее из: (а) предела 1210 проскальзывания; и (b) суммы ожидаемого проскальзывания 1226 колеса и предела 1210 проскальзывания. Эквивалентным образом, если бинарный статус 1206 задан, минимально допустимое проскальзывание 410 колеса вычисляется на операции 560 как наименьшее из: (а) предела 1210 проскальзывания, выраженного отрицательным значением 1216; и (b) ожидаемого проскальзывания 1226 колеса минус предел 1210 проскальзывания.
[00129] Операция 565 включает обнаружение того, что текущее проскальзывание 406 колеса находится за пределами диапазона между максимально и минимально допустимым проскальзыванием 408 и 410 колеса. Это обнаружение, выполняемое на операции 565, приводит к заданию бинарного статуса 1206, если он не был задан ранее. ДОП 302 нагружается на операции 570, если он не был нагружен ранее. Также предполагается повышение нагрузки ДОП 302 после обнаружения, выполненного на операции 565, если ДОП 302 был нагружен ранее.
[00130] Возвращаясь к Фигурам 10 и 13, операция 570 может заканчиваться, например, в 18-секундной отметке (пунктирная линия 434) и в 22,5-секундной отметке (пунктирная линия 438), когда крутящий момент TqDiff падает до нуля, во время чего бинарный статус 1206 ДОП 302 может быть сброшен блоком 370 управления.
[00131] Каждая из операций последовательностей 500 и 450 может быть сконфигурирована для обработки одним или более процессорами, один или более процессоров соединены с памятью. Более подробно, Фигура 14 представляет собой блок-диаграмму примера блока 370 управления. Блок 370 управления содержит процессор 602, функционально соединенный с памятью 604, входной порт 606 и выходной порт 608. Процессор 602 может включать множество сопроцессоров. Память 604 может включать один или более модулей памяти. Входной порт 606 может включать множество входных модулей. Подобным образом, выходной порт 608 может включать один или более выходных модулей. Входной порт 606 и выходной порт 608 могут быть объединены в виде модуля ввода/вывода.
[00132] В реализации входной порт 606 принимает сигналы и измерения от датчиков 376, 378 скорости колеса и датчика 390 угла поворота, а также может принимать измерения отдатчика 380 скорости транспортного средства. Выходной порт 608 выдает команды управления на активатор 372 ДОП 302 и на соленоид 382 для нагрузки и/или блокирования ДОП 302. Память 604 хранит конфигурационную информацию для управления ДОП 302, включая максимальный угол поворота транспортного средства 40, например, +/-360 градусов, коэффициент проскальзывания для транспортного средства 40, например, 30%, и таблицу соответствия проскальзывания с отношениями между значениями предела 420 проскальзывания и скоростью 416 передних колес 44.
[00133] Во время работы процессор 602 анализирует измерения скорости для обоих колес, ведомых ДОП 302, а также текущий угол поворота. Процессор 602 усредняет измерения скорости ведомых колес 44, выданные датчиками 376, 378 скорости колеса. Также предполагается использование измерений с датчика 380 скорости транспортного средства. На основе текущего угла поворота, средней скорости вращения колес 44 и на основе коэффициента проскальзывания, хранящегося в памяти 604, процессор 602 вычисляет ожидаемое проскальзывание колеса для колес 44. Процессор 602 также считывает предел проскальзывания для средней скорости вращения колес 44 из памяти 604 и вычисляет максимально и минимально допустимое проскальзывание колеса путем соответствующего прибавления и вычитания предела проскальзывания к и из ожидаемого проскальзывания колеса.
[00134] Процессор 602 также вычисляет текущее проскальзывание колеса как разницу между скоростями вращения левого и правого ведомых колес 44. Процессор 602 может вычислять уровень нагрузки, который должен быть применен к ДОП 302. Если измерения скорости колеса показывают, что текущее проскальзывание колеса находится в пределах диапазона, определенного максимально и минимально допустимым проскальзыванием 420 и 410 колеса, процессор 602 может определить, что никакой нагрузки не требуется; однако процессор 602 все еще может определить, что некоторая нагрузка подлежит применению к ДОП 302 по другим причинам. Если процессор 602 определяет, что проскальзывание колеса находится за пределами диапазона, определенного максимально и минимально допустимым проскальзыванием 408 и 410 колеса, он может побудить выходной порт 608 к выдаче команды управления на активатор 372, в свою очередь, побуждая активатор 372 к началу применения нагрузки к ДОП 302. Уровень нагрузки для управления ДОП 302 может быть вычислен, например, в зависимости от величины проскальзывания колеса или в зависимости от разницы между текущим проскальзыванием колеса и диапазоном, определенным максимально и минимально допустимым проскальзыванием 408 и 410 колеса. Вычисленный уровень нагрузки может быть частью команды управления, выдаваемой на активатор 372, например, в форме напряжения или тока, применяемого к электрическому двигателю 288, это напряжение или ток вычисляется для предоставления вычисленного значения TqDiff, подлежащего применению к муфте 374. Процессор 602 непрерывно информируется об измерениях скорости колеса, следовательно, процессор 602 может непрерывно повторно вычислять количество нагрузки. В некоторых условиях, например, при максимальной нагрузке ДОП 302 или когда нагрузка поддерживается в течение продолжительного периода времени, процессор 602 может побудить выходной порт 608 к выдаче другой команды на соленоид 382 для блокирования ДОП 302. Затем процессор 602 может прекратить применение нагрузки и/или блокирование ДОП 302, когда условий, которые побудили к нагрузке ДОП 302, больше нет.
[00135] Поскольку средняя скорость вращения колес 44 может постоянно меняться, процессор 602 непрерывно повторно оценивает ожидаемое проскальзывание колеса для колес 44, а также максимально и минимально допустимое проскальзывание 408 и 410 колеса, ввиду меняющегося ожидаемого проскальзывания колеса. Процессор может получить новое значение предела проскальзывания из памяти 604 по мере изменения средней скорости вращения колес 44.
[00136] В реализации, несмотря на то, что любая нагрузка применяется к ДОП 302 по любой причине, процессор 602 непрерывно повторно вычисляет максимально и минимально допустимое проскальзывание 408 и 410 колеса, так что максимально допустимое проскальзывание 408 колеса остается равным или больше предела проскальзывания, и так что минимально допустимое проскальзывание 410 колеса остается равным или меньше предела проскальзывания, выражаемого отрицательным значением.
Управление ДОП 302 на основе крутящего момента двигателя (режим подъема на гору)
[00137] В другом аспекте настоящей технологии представлено управление ДОП 302, соединенным с ведомыми колесами 44 транспортного средства 40, это управление по меньшей мере частично основано на текущем крутящем моменте двигателя 62, на положении средства управления ускорителем и на средней скорости колес 44. ДОП 302 предварительно нагружается в том смысле, что он переводится в состояние для ограничения потенциального проскальзывания между двумя колесами 44 перед случаем возникновения фактического проскальзывания.
[00138] В реализации пользователь транспортного средства 40 может активировать эту особенность, например, путем настройки тумблерного переключателя 65 (Фигура 3) в режим подъема на гору. В режиме подъема на гору блок 370 управления определяет то, применять ли предварительную нагрузку к ДОП 302 или нет, это определение основано на текущем крутящем моменте двигателя 62, на текущей скорости транспортного средства 40 и на требовании пользователя, возложенного на двигатель 62 с помощью средства управления ускорителем. Требование пользователя обнаруживается путем учета положения средства управления ускорителем, например, педали 91 ускорителя (Фигура 2). Предполагается, что в качестве средства управления ускорителем может быть использован спиральный ускоритель (не показан) или кнопка (не показана), установленная на рычаге управления (не показан). Рассматривая, например, относительно низкую скорость транспортного средства 40 одновременно с высоким выходным крутящим моментом двигателя 62 и/или с внезапной резкой активацией средства управления ускорителем, пользователь может въезжать на транспортном средстве 40 на крутой уклон, например, готовя транспортное средство 40 к подъему по горной поверхности. Предварительная нагрузка ДОП 302 в это время, ввиду крутящего момента двигателя, который может быть прогнозирован на основе положения средства управления ускорителем, усиливает управление транспортным средством 40, предоставляемое пользователю, за счет предотвращения проскальзывания колеса перед тем, как это произойдет по факту.
[00139] Таблица II представляет собой неограничивающий пример таблицы соответствия нагрузки, которая может быть использована блоком 370 управления для управления предварительной нагрузки ДОП 302. Таблица показывает значения для применения к муфте 374 ДОП 302 в ньютон-метрах (Нм) в зависимости от прогнозированного крутящего момента двигателя, также в Нм, и в зависимости от скорости транспортного средства 40, скорость выражается как в километрах в час (км/ч), так и в виде среднего значения скоростей вращения левого и правого колес 44 в оборотах в минуту (об/мин).
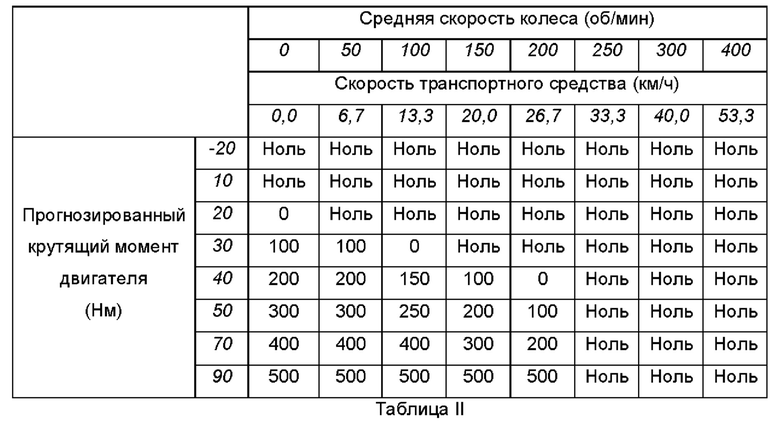
[00140] В целях иллюстрации, предполагая, что полный диаметр колеса составляет примерно 71 сантиметров, в Таблице II представлены значения крутящего момента, применяемые к муфте 374 ДОП 302 для скоростей транспортного средства 40 вплоть до примерно 53,3 км/ч, соответствующих скорости колеса 400 об/мин, и для различных значений прогнозированного крутящего момента двигателя.
[00141] Также в Таблице II нулевые значения отражают то, что блок 370 управления не побуждает к применению какой-либо предварительной нагрузки к ДОП 302 для соответствующих комбинаций прогнозированного крутящего момента двигателя и значений скорости транспортного средства. Несмотря на то, что это не показано в конкретном примере в Таблице II, таблица соответствия нагрузки также может использовать нулевые значения для представления ситуаций, в которых электрический двигатель 288 не применяет давление к муфте 374, тогда как в то же время, муфта 274 и ДОП 304 блокируются путем запитки соленоида 382 для блокирования набора 276 шестерней. Здесь ниже представлены примеры нулевых значений, отражающих блокирование ДОП 304 путем использования соленоида.
[00142] Блок 370 управления может определить скорость транспортного средства 40 на основе измерений с датчика 380 скорости транспортного средства или путем усреднения измерений с датчиков 376, 378 скорости колеса. Блок 370 управления также принимает измерение крутящего момента двигателя от датчика 394 для мониторинга крутящего момента двигателя. В реализации датчик 394 для мониторинга крутящего момента двигателя определяет выходной крутящий момент двигателя на основе измерений впущенного воздуха и топлива, а также на основе опережения зажигания. Также предполагается использование датчика крутящего момента, функционально соединенного с двигателем 62.
[00143] Блок 370 управления управляет крутящим моментом, подлежащим применению к муфте 374 ДОП 302, с учетом прогнозированного крутящего момента двигателя, определенного из таблицы соответствия нагрузки из Таблицы II. Значение крутящего момента, подлежащего применению к муфте 374, преобразуется блоком 370 управления в уровень тока, который должен быть предоставлен на электрический двигатель 288 для обеспечения желаемого уровня предварительной нагрузки. Это преобразование зависит от характеристик электрического двигателя 288, набора 276 шестерней и муфты 374. В конкретной реализации, в которой электрический двигатель 288 представляет собой 12-вольтовый двигатель постоянного тока, значение крутящего момента 500 Нм, применяемого к муфте 374, получается путем применения тока в размере 10 ампер к электрическому двигателю 288. В качестве альтернативы, электрический двигатель 288 может представлять собой шаговый двигатель, в случае чего блок 370 управления определяет количество шагов, достаточных для побуждения электрического двигателя 288 к применению желаемого уровня предварительной нагрузки к ДОП 302. Также предполагается, что блок 370 управления может использовать широтно-импульсную модуляцию для управления электрического двигателя 288.
[00144] В варианте настоящей технологии в блоке 370 управления может быть определено множество таблиц, подобных Таблице II. Также может предполагаться использование разных таблиц соответствия нагрузки, определенных для различных доступных передаточных отношений ведущего моста 66 в блоке с коробкой передач, сообщаемых блоку 370 управления индикатором 396 положения переключателя.
[00145] Без ограничения, описанный выше переключатель 60 для ведущего моста 66 в блоке с коробкой передач позволяет водителю выбирать между передачей заднего хода, повышенной и пониженной передачами переднего хода и нейтральным положением. В целях иллюстрации, таблица соответствия нагрузки в Таблице II может быть применима к передаче заднего хода и к пониженной передаче переднего хода. Когда повышенная передача переднего хода ведущего моста 66 в блоке в коробкой передач выбрана переключателем 60, блок 370 управления применяет другую таблицу соответствия нагрузки. Таблица III представляет неограничивающий пример таблицы соответствия нагрузки, применимой когда ведущий мост 66 в блоке с коробкой передач находится при повышенной передаче:
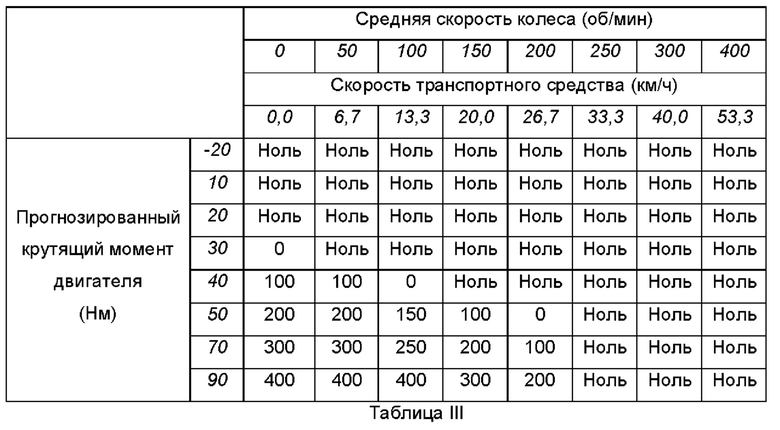
[00146] Когда коробка передач находится в состоянии повышенной передачи, для заданного прогнозированного крутящего момента двигателя и заданной скорости транспортного средства, крутящий момент, применяемый к муфте 374 ДОП 302 ниже чем когда коробка передач находится в состоянии пониженной передачи при прогнозированном крутящем моменте двигателя и такой же скорости транспортного средства. В неограничивающем примере Таблицы III, когда ведущий мост 66 в блоке с коробкой передач находится в состоянии повышенной передачи, значения крутящего момента, применяемого к муфте 374 ДОП 302 в зависимости от прогнозированного крутящего момента двигателя и в зависимости от скорости транспортного средства 40, сдвигаются в направлении низа таблицы соответствия нагрузки, так что, например, при повышенной передаче, предварительная нагрузка применяется для прогнозированного крутящего момента, составляющего 90 Нм, на том же уровне, что и для прогнозированного крутящего момента двигателя, составляющего 70 Нм, при пониженной передаче.
[00147] В том же или другом варианте настоящей технологии блок 370 управления может выполнять оценку желаемого ускорения пользователем транспортного средства 40. Для этой цели блок 370 управления использует информацию в режиме реального времени с датчика 392 средства управления ускорителем. Датчик 392 средства управления ускорителем выдает сигналы, указывающие на текущее положение средства управления ускорителем, активируемого пользователем транспортного средства 40, например, педали 91 ускорителя (Фигура 2). Предполагается, что в качестве альтернативы, датчик 392 средства управления ускорителем может выдавать положение дискового клапана в дроссельном регуляторе двигателя 62. Блок 370 управления определяет ускорение положения средства управления ускорителем на основе информации в режиме реального времени, выданной датчиком 392 средства управления ускорителем. Сильное, положительное ускорение положения средства управления ускорителем указывает на то, что пользователь желает, чтобы транспортное средство 40 резко ускорилось. Сильное, отрицательное ускорение (т.е. замедление) положения средства управления ускорителем указывает на то, что пользователь намеревается резко замедлить транспортное средство 40. Можно отметить, что ожидается, что датчик 392 средства управления ускорителем будет реагировать более быстро чем линия привода транспортного средства 40, в том числе двигатель 62, БКП 64, ведущий мост 66 в блоке с коробкой передач и тому подобное. В результате, блок 370 управления способен модифицировать предварительную нагрузку на ДОП 302 перед тем, как фактическое увеличение или уменьшение крутящего момента от двигателя 62 начинает присутствовать на ведущем вале 90.
[00148] Таким образом, предварительная нагрузка может быть основана на прогнозированном крутящем моменте двигателя, вычисленном в соответствии с уравнением (1):

[00149] Причем:
[00150] прогнозированный_крутящий момент_двигателя прогнозированное значение выходного крутящего момента двигателя;
[00151] обнаруженный_крутящий момент - измеренное значение выходного крутящего момента двигателя;
[00152] положение_ускорителя - измеренное значение положения средства управления ускорителем;
[00153] - скорость изменения положения средства управления ускорителем с течением времени; и
- скорость изменения положения средства управления ускорителем с течением времени; и
[00154] постоянная - постоянная, значение которое определено заранее на основе характеристик линии привода транспортного средства 40.
[00155] Таким образом, согласно уравнению (1), прогнозированный крутящий момент двигателя вычисляется путем прибавления регулировки крутящего момента, которая пропорциональна скорости изменения положения средства управления ускорителем с течением времени, к фактическому выходному крутящему моменту двигателя, как было измерено.
[00156] В реализации блок 370 управления реализует уравнение (1) для вычисления прогнозированного крутящего момента двигателя. В альтернативной реализации блок 370 управления использует таблицу соответствия крутящего момента для сохранения отношений между прогнозированным крутящим моментом двигателя, положением средства управления ускорителем и скоростью изменения положения средства управления ускорителем.
[00157] Фигура 15 иллюстрирует блок-диаграмму, показывающую внутренние операции блока 370 управления для определения прогнозируемого крутящего момента двигателя, согласно реализации. Блок-диаграмма 610 показывает, что блоком 370 управления может быть использовано до трех (3) вводов для определения прогнозированного крутящего момента двигателя. Предполагается, что в реализации блок 370 управления может использовать дополнительные вводы для определения прогнозированного крутящего момента двигателя. Один такой ввод представляет собой текущий выходной крутящий момент 612 двигателя, выражаемый в Нм, это значение выдается на блок 370 управления датчиком 394 для мониторинга крутящего момента двигателя. Другой ввод представляет собой положение 614 средства управления ускорителем, выражаемое в процентах, например, положение педали 91 ускорителя, это значение выдается на блок 370 управления датчиком 392 средства управления ускорителем. Еще один другой ввод представляет собой скорость 616 изменения ускорителя, выражаемую в процентной вариации положения ускорителя в секунду. В реализации на Фигуре 15 скорость 616 изменения ускорителя определяется блоком 370 управления на основе сигнала с датчика 392 средства управления ускорителем. В варианте блок 370 управления может внутренним образом отслеживать изменения положения 614 средства управления ускорителем для вычисления скорости 616 изменения ускорителя.
[00158] Скорость 616 изменения ускорителя умножается на заранее определенный ограничивающий по времени интервал 618 на множитель 620 для выдачи прироста 622 средства управления ускорителем. В неограничивающем примере на Фигуре 15 ограничивающий по времени интервал 618 равен 0,75 секунды. Это значение предполагает, что скорость 616 изменения ускорителя рассматривается в течение 0,75-секундного периода. Прирост 622 средства управления ускорителем и положение 614 средства управления ускорителем применяются к сумматору 624. Сумматор 624 выдает эквивалентное положение 626 средства управления ускорителем, которое может быть больше, чем 100% и, следовательно, превышать реальное полное открытие. Эквивалентное положение 626 средства управления ускорителем применяется к блоку 628. Блок 628 проиллюстрирован в виде графического представления таблицы соответствия крутящего момента, которая предоставляет оценку 630 крутящего момента двигателя в зависимости от эквивалентного положения 626 средства управления ускорителем. В Таблице IV представлен неограничивающий пример содержания таблицы соответствия крутящего момента, которая может быть использована блоком 370 управления.
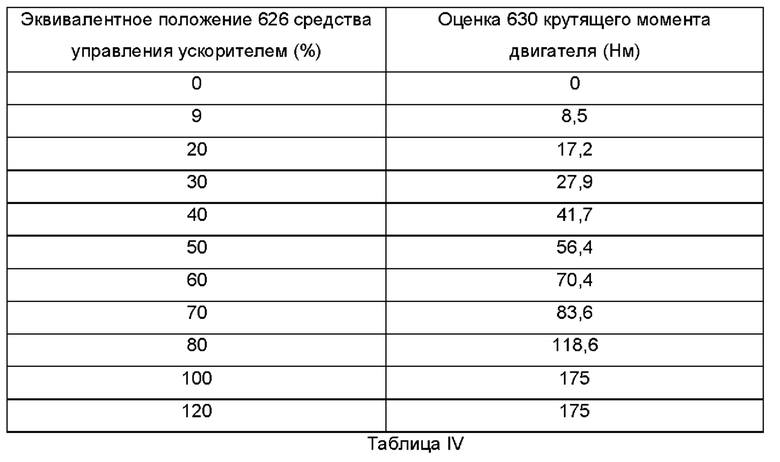
Положение 614 средства управления ускорителем и прирост 622 средства управления ускорителем также применяются к блоку 632 выбора, который выбирает меньшее из этих двух (2) вводов. Блок 632 выбора затем выдает минимальное положение 634 средства управления ускорителем, которое является меньшим из положения 614 средства управления ускорителем и прироста 622 средства управления ускорителем. Делитель 636 делит минимальное положение 634 средства управления ускорителем на положение 614 средства управления ускорителем для выдачи поправочного коэффициента 638 средства управления ускорителем, подлежащего применению к оценке 630 крутящего момента двигателя. Поправочный коэффициент 638 средства управления ускорителем находится в диапазоне от нуля (0) до единицы (1) и является бесконечно малым. Если минимальное положение 634 средства управления ускорителем и положение 614 средства управления ускорителем равны нулю, поправочный коэффициент 638 средства управления ускорителем устанавливается на единицу (1). Умножитель 640 умножает оценку 630 крутящего момента двигателя на поправочный коэффициент 638 средства управления ускорителем для выдачи проецированного крутящего момента 642. Поскольку поправочный коэффициент 638 средства управления ускорителем определен в диапазоне от нуля до единицы, проецированный крутящий момент 642 меньше чем или равняется оценке 630 крутящего момента двигателя. Иначе говоря, поправочный коэффициент 638 средства управления ускорителем ограничивает оценку 630 крутящего момента двигателя ввиду реального прогноза положения средства управления ускорителем. Вычитатель 644 вычитает поправочный коэффициент 638 средства управления ускорителем из единичного числа 646 (т.е. из единицы (1)) для получения поправочного коэффициента 648 крутящего момента. Умножитель умножает выходной крутящий момент 612 двигателя на поправочный коэффициент 648 крутящего момента для получения поправки 652 крутящего момента. Поправка 652 крутящего момента прибавляется к проецированному крутящему моменту 642 в сумматоре 654 для получения желаемого значения, которое представляет собой прогнозированный крутящий момент 656 двигателя.
[00159] Вне зависимости от того, определяется ли в реализации прогнозированный крутящий момент двигателя в соответствии с уравнением (1) или с использованием операций, описанных в отношении Фигуры 15, эффект определения прогнозированного крутящего момента двигателя схожий. В целях иллюстрации, несмотря на то, что выходной крутящий момент двигателя в заданное время может быть равен, например, 20 Нм, как сообщено датчиком 394 для мониторинга крутящего момента двигателя, обнаружение того, что пользователь в значительной степени воздействует на средство управления ускорителем, может дать вычисленное значение прогнозированного крутящего момента двигателя, составляющее, например, 90 Нм. Предполагая, что в это время скорость транспортного средства 40 составляет 20 км/ч, крутящий момент, подлежащий применению к муфте 374, будет изменен с нуля на 500 Нм. Для управления предварительной нагрузкой блок 370 управления вводит прогнозированный крутящий момент двигателя в таблицы соответствия предварительной нагрузки в Таблицах II и III, одна из этих таблиц соответствия нагрузки выбирается в соответствии с положением переключателя 60. В представленном выше примере ДОП 302 будет резко переходить из состояния без предварительной нагрузки в состояние максимальной предварительной нагрузки, этот результат достигается намного быстрее чем когда ДОП 302 нагружается после обнаружения того, что имеет место проскальзывание передних колес 44. В зависимости от характеристик двигателя 32, БКП 64, приводных валов 82, 84 и самого ДОП 302, ДОП 302 будет достигать состояния максимальной предварительной нагрузки перед любым фактическим изменением крутящего момента на ведущем вале 90 ДОП 302. Можно отметить, что скорость изменения положения средства управления ускорителем с течением времени может быть отрицательной, если пользователь ослабляет средство управления ускорителем. Таким образом, прогнозированный крутящий момент двигателя может быть ниже, чем выходной крутящий момент двигателя, который был измерен, потенциально вызывая уменьшение и ослабление предварительной нагрузки.
[00160] Фигура 16 представляет собой диаграмму последовательности, показывающую операции способа управления ДОП 302 на основе крутящего момента двигателя, положения средства управления ускорителем и скорости изменения положения средства управления ускорителем. Последовательность 700 содержит множество операций, некоторые из которых могут быть выполнены в переменном порядке, некоторые операции, возможно, выполняются одновременно, а некоторые операции являются необязательными. Последовательность 700 может быть реализована в транспортном средстве, например, транспортном средстве 40. Транспортное средство 40 имеет двигатель и может иметь коробку передач, например, двигатель 62 и БКП 64, соединенную с ведущим мостом 66 в блоке с коробкой передач. Дифференциал ограниченного проскальзывания (ДОП), например, ДОП 302, функционально соединен посредством половинчатых валов 98 с колесами 44, приводимыми двигателем 62. Крутящий момент от двигателя 62 применяется к ДОП 302 посредством ведущего вала 90.
[00161] В последовательности 700 операция 712 включает определение текущего выходного крутящего момента двигателя 62, этот измерение крутящего момента двигателя выдается на блок 370 управления датчиком 394 для мониторинга крутящего момента двигателя. Блок 370 управления определяет положение средства управления ускорителем на операции 714 на основе измерения с датчика 392 средства управления ускорителем. Скорость изменения положения средства управления ускорителем с течением времени определяется на операции 716. Скорость изменения положения средства управления ускорителем с течением времени выдается на блок 370 управления датчиком 392 средства управления ускорителем. В качестве альтернативы, блок 370 управления может вычислять эту скорость изменения на основе последовательных измерений, выдаваемых датчиком 392 средства управления ускорителем. Блок 370 управления определяет прогнозированный крутящий момент двигателя на операции 718, прогнозированный крутящий момент двигателя основан на текущем выходном крутящем моменте двигателя и на скорости изменения положения средства управления ускорителем с течением времени. На операции 718 блок 370 управления может прибавлять регулировку крутящего момента к текущему выходному крутящему моменту двигателя в соответствии с уравнением (1). В качестве альтернативы, на операции 718 блок 370 управления может реализовывать операции блок-диаграммы 610 на Фигуре 15. Также предполагается другая альтернатива, в которой блок 370 управления применяет текущий выходной крутящий момент двигателя, положение средства управления ускорителем и скорость изменения положения средства управления ускорителем с течением времени к трехмерной справочной таблице для получения значения прогнозированного крутящего момента двигателя.
[00162] Затем на операции 720 определяется скорость транспортного средства 40. Скорость транспортного средства 40 может быть выдана на блок 370 управления датчиком 380 скорости транспортного средства. В качестве альтернативы, операция 720 может включать подоперацию 722, включающую измерение скоростей вращения левого и правого колес 44 датчиками 376, 378 скорости колеса. Это измерение выдается на блок 370 управления, который определяет среднее значение скоростей вращения левого и правого колес 44 для определения скорости транспортного средства 40 на основе этого среднего значения, а также на основе размера левого и правого колес 44.
[00163] Затем, операция 730 включает определение значения предварительной нагрузки для последующего применения к ДОП 302, значение предварительной нагрузки основано на прогнозированном крутящем моменте двигателя и на скорости транспортного средства 40. В реализации операция 730 может включать подоперацию 732, на которой прогнозированный крутящий момент двигателя и скорость транспортного средства 40 применяются блоком 370 управления к таблице соответствия нагрузки для считывания из нее значения крутящего момента, подлежащего применению к муфте 374 ДОП 302. В варианте блок управления может выбирать таблицу соответствия нагрузки из множества таблиц соответствия нагрузки, например, проиллюстрированных в Таблицах II и III, в соответствии с положением переключателя 60, это положение выдается на блок 370 управления индикатором 396 положения переключателя.
[00164] Учитывая таблицы соответствия нагрузки, проиллюстрированные в Таблицах II и III, значение предварительной нагрузки для применения к ДОП 302, выраженное в форме крутящего момента, подлежащего применению к муфте 374 в настоящем примере, может быть нулевым (или Нулем) или может быть больше или равно нулю. На операции 740 блок 370 управления при определенных условиях выполняет применение предварительной нагрузки к ДОП 302, это применение зависит от значения предварительной нагрузки, которое больше нуля (т.е. не Ноль или отрицательное). Операция 740 может включать подоперацию 742, на которой блок 370 управления управляет электрическим двигателем 288 для приведения в действие набора 276 шестерней и рампы 278 для шариков для сжатия муфты 374 в соответствии со значением крутящего момента, полученного из таблицы соответствия нагрузки. На этой операции нагружается ДОП 302, тем самым предотвращая или уменьшая разницу скорости вращения левого и правого колес 44.
[00165] Необязательно, набор 276 шестерней может быть заблокирован на операции 750. С этой целью, блок 370 управления может использовать соленоид 382 для блокирования набора 276 шестерней.
[00166] Каждая из операций последовательности 700 может быть сконфигурирована для обработки одним или более процессорами, один или более процессоров соединен с памятью, например, процессор 602 и память 604 блока управления, проиллюстрированного на Фигуре 14.
[00167] В реализации входной порт 606 принимает сигналы и измерения сдатчиков 376, 378 скорости колеса, датчика 380 скорости транспортного средства, датчика 392 средства управления ускорителем, датчика 394 для мониторинга крутящего момента двигателя и индикатора 396 положения переключателя. Выходной порт 608 выдает команды на активатор 372 ДОП 302 и на соленоид 382 для предварительной нагрузки и/или блокирования ДОП 302. Память 604 хранит конфигурационную информацию для управления ДОП 302, в том числе, например, таблицу соответствия нагрузки или множество таких таблиц соответствия нагрузки для множества положений переключателя 60, таблицу соответствия крутящего момента с оценкой крутящего момента двигателя в зависимости от положения средства управления ускорителем, и размеров колес 44, выраженных в виде радиуса, диаметра или в виде окружности.
[00168] В ходе работы процессор 602 анализирует измерения, полученные с датчика 380 скорости транспортного средства и/или измерений с датчиков 376, 378 скорости колеса для определения скорости транспортного средства 40. В реализации с использованием измерений с датчиков 376, 378 скорости колеса блок управления определяет скорость транспортного средства 40 на основе среднего значения скоростей вращения левого и правого колес 44. Процессор 602 также анализирует измерения с датчика 394 для мониторинга крутящего момента двигателя. Процессор 602 определяет значение выходного крутящего момента двигателя 62 на основе измерений с датчика 394 для мониторинга крутящего момента двигателя. На основе значения выходного крутящего момента двигателя 62 и скорости транспортного средства 40 процессор 602 определяет значение предварительной нагрузки, если таковая имеется, для применения к ДОП 302. Процессор 602 побуждает выходной порт 608 к выдаче команды на активатор 372, в свою очередь побуждая активатор 372 к применению предварительной нагрузки к ДОП 302 путем сжатия муфты 374.
[00169] Конфигурационная информация, хранящаяся в памяти 604, может включать таблицу соответствия нагрузки из Таблицы II. В реализации память 604 необязательно может хранить множество таблиц соответствия нагрузки для каждого из множества положений переключателя 60, как показано, например, в Таблицах II и III. Процессор 602 может использовать индикацию, принятую на входном порту 606 от индикатора 396 положения переключателя, для выбора одной из этих таблиц соответствия нагрузки в памяти 604. В любом случае, процессор 602 может применить значение выходного крутящего момента двигателя 62 и скорость транспортного средства 40 к таблице соответствия нагрузки для определения значения крутящего момента, подлежащего применению к муфте 374 ДОП 302. Конфигурационная информация, хранящаяся в памяти 604, может также включать таблицу соответствия крутящего момента из Таблицы IV.
[00170] Процессор 602 необязательно информируется через входной порт 606 о текущем положении средства управления ускорителем, выданном датчиком 392 средства управления ускорителем. Датчик 392 средства управления ускорителем также может выдавать скорость изменения положения средства управления ускорителем, или процессор 602 может непрерывно определять скорость изменения положения средства управления ускорителем на основе последовательных сигналов с датчика 392 средства управления ускорителем. Если процессор 602 определяет, что пользователь резко увеличил или уменьшил потребность в средстве управления ускорителем, процессор 602 может, в реализации, применить поправочный коэффициент уравнения (1) для получения прогноза выходного крутящего момента двигателя 62. В другой реализации процессор 602 может реализовывать элементы блок-диаграммы 610 и исполнять ее различные операции для определения прогноза выходного крутящего момента двигателя 62. В любом случае, этот прогнозированный выходной крутящий момент используется как значение выходного крутящего момента двигателя 62 для считывания значения крутящего момента, подлежащего применению к муфте 374 ДОП 302, из таблицы соответствия нагрузки, ввиду предварительной нагрузки для ДОП 302.
[00171] Процессор 602 может побуждать выходной порт 608 к выдаче команды на запитку соленоида 382, тем самым побуждая зубец 384 соленоида 382 к зацеплению с набором 276 шестерней, эффективно блокируя ДОП 302. Эта команда на блокирование ДОП 302 может следовать после применения предварительной нагрузки, например, максимального сжатия муфты 374.
Управление ДОП 302, оптимизированное для скользких условий езды (Режим грязи)
[00172] Еще в одном аспекте настоящей технологии представлено управление ДОП 302, соединенным с ведомыми колесами 44 транспортного средства 40, это управление по меньшей мере частично основано на обнаружении скользких условий езды, как, например, когда транспортное средство 40 находится на местности с сильной грязью или на другой сложно проходимой местности. В контексте настоящего раскрытия термин «скользкие условия езды» используется в целях удобства для ссылки на условия, такие как езда по сильной грязи или по другим очень скользким поверхностям, в том числе, без ограничения, по мелкому гравию, дорогам, покрытым льдом, глубокому снегу, мелким рекам и тому подобному. Настоящая технология применима, в частности, но без исключения, к внедорожным транспортным средствам.
[00173] В реализации пользователь транспортного средства 40 может активировать эту особенность, например, путем настройки тумблерного переключателя 65 (Фигура 3) в режим грязи. Блок 370 управления может обнаруживать или логически выводить то, что транспортное средство 40 перемещается по сильной грязи или в других скользких условиях езды с использованием любой одной или комбинации из трех (3) ситуаций. Первая ситуация - это когда обнаружено заранее определенное количество случаев возникновения проскальзывания колеса. Вторая ситуация - это когда колесо проскальзывает несмотря на применение предварительной нагрузки к ДОП 302. Третья ситуация - это когда выходной крутящий момент двигателя выше линии нагрузки двигателя.
[00174] Примеры этих трех (3) ситуаций приведены на Фигуре 17, которая представляет собой блок-диаграмму 800, показывающую внутренние операции блока 370 управления для управления ДОП 302 в режиме грязи, согласно реализации. Блок-диаграмма 800 показывает, что в настоящей реализации блок 370 управления может использовать до четырех (4) вводов для управления ДОП 302 в режиме грязи. Предполагается, что в реализации блок 370 управления может использовать дополнительные вводы.
[00175] Один такой ввод представляет собой обнаружение 802 проскальзывания колеса. Обнаружение 802 проскальзывания колеса может быть сгенерировано внутренним образом блоком 370 управления, когда разница между измерениями скоростей вращения левого и правого передних колес 44 с датчиков 376, 378 скорости колеса указывает на то, что одно из передних колес 44 проскальзывает на величину, превышающую пороговое значение. Перед обнаружением проскальзывания колеса блок 370 управления может позволить разнице скорости вращения превысить максимальную разницу скоростей вращения для учета естественной разницы скорости колес 44, когда транспортное средство 40 двигается по кривой. Например, в реализации, когда управление ДОП 302 на основе угла поворота транспортного средства 40 и управление ДОП 302, оптимизированное для скользких условий езды (Режим грязи), поддерживаются блоком 370 управления, обнаружение 802 проскальзывания колеса может быть сгенерировано, когда проскальзывание 406 колеса выходит за пределы допустимого диапазона проскальзывания, определенного максимально и минимально допустимым проскальзыванием 408 и 410 колеса.
[00176] Второй ввод представляет собой индикацию 804 активности ДОП 302, это указание 804 активности задается, когда нагрузка применяется к ДОП 302 посредством электрического двигателя 288. Третий ввод представляет собой скорость 806 транспортного средства, которая может быть выдана на блок 370 управления датчиком 380 скорости транспортного средства. В качестве альтернативы, скорость 666 транспортного средства эквивалентным образом может быть основана на измерениях скоростей вращения левого и правого колес 44, выполненных датчиками 376, 378 скорости колеса, скорость 666 транспортного средства логически выведены блоком 370 управления на основе этих измерений и размеров передних колес 44. Четвертый ввод представляет собой текущий выходной крутящий момент 808 двигателя, выражаемый в Нм, это значение выдается на блок 370 управления датчиком 394 для мониторинга крутящего момента двигателя.
[00177] Далее будет описан пример со ссылкой на Фигуру 17. Блок-диаграмма 800 включает ряд логических компонентов, которые реализуют логические функции И, ИЛИ и НЕТ. Настоящее описание приведено с указанием логических 1 и 0 на выходе некоторых компонентов. Этот способ описания блок-диаграммы 800 представлен в целях простоты и не ограничивает настоящее раскрытие. Также предполагаются другие реализации, использующие противоположные 0 и 1 или использующие другие логические значения, такие как Истина или Ложь, а также реализации логических событий блок-диаграммы 800 с использованием программного кода.
[00178] Рассматривая первую ситуацию, обнаружение 802 проскальзывания колеса задается на 1, если обнаружено проскальзывание колеса, или на 0 при отсутствии проскальзывания колеса. Этот вывод применяется на вводе блока 810 изменения определения, который коротко выдает индикацию 812 изменения, заданную на 1, когда ввод меняется с 0 на 1, то есть когда проскальзывание колеса обнаруживается в первый раз. Индикация 812 изменения возвращается на 0 после короткой задержки и остается на 0, если обнаружение 802 проскальзывания колеса изменено на 0. Индикация 812 изменения применяется к счетчику 814, который считает количество случаев возникновения индикаций 812 изменения, задаваемое на 1. В действительности, счетчик 814 считает количество случаев возникновения разных событий проскальзывания колеса. Когда счетчик 814 превышает заранее определенное количество случаев возникновения проскальзывания колеса, например, трех (3) появлений проскальзывания колеса, он применяет логическую 1 к вводу первого блока 816 «ИЛИ», имеющему два (2) ввода. Затем, вне зависимости от значения, примененного к другому вводу первого блока 816 «ИЛИ», первый блок 816 «ИЛИ» применяет логическую 1 к вводу второго блока 818 «ИЛИ», имеющему два (2) ввода. Затем, вне зависимости от значения, примененного к другому вводу второго блока 818 «ИЛИ», второй блок 816 «ИЛИ» выдает запрос 820 на блокирование ДОП 302. Запрос 820 на блокирование может активировать применение нагрузки к ДОП 302, например, применение максимального крутящего момента к муфте 374, а также может активировать запитку соленоида 382 для эффективного блокирования ДОП 302. Первая ситуация реализуется повторяющимся проскальзыванием колеса, вызывая блокирование ДОП 302.
[00179] Блок 846 сброса, который подробно описан здесь ниже, может активировать сброс счетчика 814, когда выходной крутящий момент 808 двигателя падает до заданной точки 842 низшего крутящего момента. Таким образом, ожидается, что счетчик 814 будет сбрасываться в различные моменты времени в ходе нормальной работы транспортного средства 40. Также предполагается использование таймера для сброса счетчика 814, когда к блоку 810 определения изменения не применяется какое-либо обнаружение 802 проскальзывания колеса по прошествии заранее определенного порогового времени.
[00180] Рассматривая теперь вторую ситуацию, индикация 804 активности для ДОП 302, которая задается, когда к ДОП 302 применяется нагрузка, и индикация 812 изменения применяются к вводам блока 822 «И». Блок 822 «И» выдает 1, когда оба его ввода заданы на 1, что происходит, когда индикация 812 изменения указывает на то, что обнаружено проскальзывание колеса, тогда как индикация 804 активности указывает на то, что нагрузка уже применяется к ДОП 302. 1, которая выдается из блока 822 «И», проходит через первый и второй блоки 816, 818 «ИЛИ», последний выдает запрос 820 на блокирование ДОП 302. Вторая ситуация реализуется за счет случая возникновения проскальзывания колеса при нагрузке ДОП 302, вызывая блокирование ДОП 302.
[00181] Рассматривая теперь третью ситуацию, скорость 806 транспортного средства применяется к таблице 824 соответствия линии нагрузки. Фигура 18 представляет собой график 830 линии 832 нагрузки двигателя. На графике 830, показанном на Фигуре 18, линия 832 нагрузки представляет собой идеализированное представление ожидаемого выходного крутящего момента 834 двигателя, необходимого для перемещения транспортного средства, в зависимости от скорости 806 транспортного средства, когда транспортное средство 40 перемещается по поверхности плоского уровня с минимальным внешним сопротивлением. На графике 830 точка 836 представляет ситуацию, в которой транспортное средство 40 едет по сильной грязи или находится в других скользких условиях езды. В этой ситуации текущий крутящий момент 836- двигателя больше, чем ожидаемый выходной крутящий момент 834 двигателя для заданной скорости 836S транспортного средства 40.
[00182] Таблица V представляет собой неограничивающий пример таблицы 824 соответствия линии нагрузки, которая может быть использована блоком 370 управления для определения того, когда крутящий момент, запрошенный пользователем транспортного средства 40, выше линии нагрузки двигателя. Таблица показывает скорость 806 транспортного средства, выраженную в виде среднего значения скоростей вращения левого и правого колес 44 в оборотах в минуту (об/мин), в зависимости от выходного крутящего момента 808 двигателя, в ньютон-метрах (Нм).
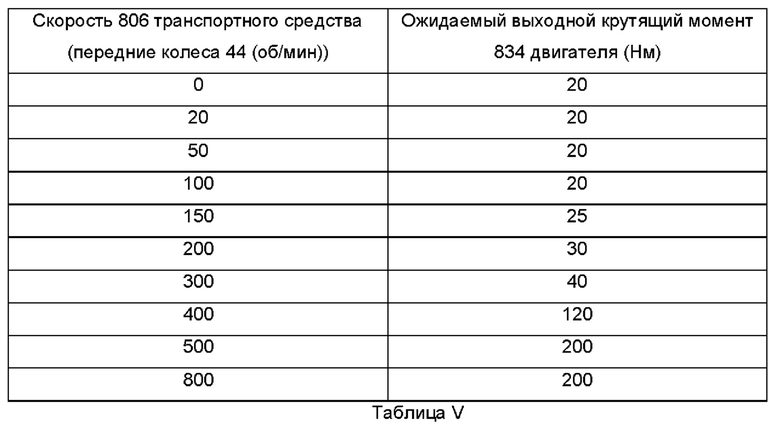
[00183] Таблица 824 соответствия линии нагрузки выдает ожидаемый выходной крутящий момент 834 двигателя в зависимости от скорости 806 транспортного средства. Возвращаясь к Фиг. 17, выходной крутящий момент 808 двигателя сравнивается с ожидаемым выходным крутящим моментом 834 двигателя первым компаратором 838. Если выходной крутящий момент 808 двигателя больше, чем ожидаемый выходной крутящий момент 834 двигателя, требование крутящего момента от пользователя выше линии нагрузки двигателя, и первый компаратор 838 выдает 1, которая применяется ко второму блоку 818 «ИЛИ». Второй блок 818 «ИЛИ» выдает запрос 820 на блокирование ДОП 302. Третья ситуация реализуется избыточным крутящим моментом двигателя, вызывая блокирование ДОП 302.
[00184] Когда ни один из вводов, применяемых к первому и второму блокам 816 и 818 «ИЛИ», не задан на 1, их выводы задаются на 0, а запрос 820 на блокирование не выдается.
[00185] Другие компоненты блок-диаграммы 800 используются для удаления действия запроса 820 на блокирование, если он уже был выдан.
[00186] Выходной крутящий момент 808 двигателя сравнивается вторым компаратором 840 с заданной точкой 842 низшего крутящего момента, которая установлена на 5 Нм в неограничивающем примере на Фигуре 17. Второй компаратор 840 выдает индикацию 844 низкого крутящего момента, заданную на 1, если выходной крутящий момент 808 двигателя меньше чем заданная точка 842 низшего крутящего момента. Индикация 844 низкого крутящего момента, если задана на 1, побуждает блок 846 сброса к сбросу счетчика 814 на ноль случаев возникновения проскальзывания колеса. В результате, счетчик 814 применяет логический 0 к первому блоку 816 «ИЛИ». Если к другим вводам блоков 816 и 818 «ИЛИ» в это время не применяется логическая 1, это может привести к удалению запроса 820 на блокирование. Можно отметить, что удаления запроса 820 на блокирование не достаточно для того, чтобы вызвать разблокирование ДОП 302, поскольку другие рабочие условия транспортного средства 40 могут требовать того, чтобы ДОП 302 оставался заблокированным.
[00187] Индикация 844 низкого крутящего момента также применяется к вводу (R) сброса в блоке 848 триггера. В действительности, индикация 844 низкого крутящего момента применяет логическую 1 к вводу R в блоке 848 триггера, когда выходной крутящий момент 808 двигателя ниже чем заданная точка 842 низшего крутящего момента.
[00188] Вывод первого блока 816 «ИЛИ» также применяется к вводу (S) установки в блоке 848 триггера. Таким образом, логическая 1 применяется к вводу S в блоке 848 триггера, когда происходят первая или вторая ситуация, то есть когда обнаружено заранее определенное количество случаев возникновения проскальзывания колеса или когда колесо 44 выполняет проскальзывание несмотря на применение предварительной нагрузки к ДОП 302. Логическая 1 также применяется к вводу S в блоке 848 триггера, когда обе эти ситуации происходят одновременно. Блок 848 триггера имеет вывод (Q) 850, который задается на 1, когда ввод S задан на 1. После задания на 1, вывод Q 850 остается заданным, если ввод S задан на 0, до тех пор, пока ввод R в блоке 848 триггера задан на 1, после чего вывод Q 850 задается на 0. Не ожидается, что оба ввода S и R одновременно заданы на 1, поскольку это состояние будет требовать проскальзывания передних колес 44 при очень низком крутящем моменте 808 двигателя. Независимо от этого, вывод Q 850 задается на 0, если имеет место это обстоятельство. Вкратце, вывод Q 850 задается на 1, когда имеют место условия, определенные в первой и второй ситуациях для блокирования ДОП 302.
[00189] Вывод первого компаратора 838 отрицается блоком 852 «НЕТ». Его выводом является индикация 854 линии нагрузки, заданная на 0, когда требование крутящего момента от пользователя выше линии нагрузки двигателя, а в противном случае - на 1. Переключатель 856 имеет три (3) ввода, к которым применяются вывод Q 850 в блоке 848 триггера, индикация 854 линии нагрузки и индикация 844 низкого крутящего момента. Переключатель 856 работает следующим образом.
[00190] Если вывод Q 850 задан на 1 (одна из первой и второй ситуаций приводит к выдаче запроса 820 на блокирование), переключатель 856 выдает значение индикации 844 низкого крутящего момента. В это время ожидается, что значение индикации 844 низкого крутящего момента задано на 0, поскольку возникновение событий проскальзывания колеса, вызывающих задание ввода S в блоке 848 триггера, в целом не ожидается при очень низких значениях крутящего момента двигателя. Если вывод Q 850 задан на 1, а индикация низкого крутящего момента задана на 0, переключатель 856 не выдает запрос 858 на разблокирование.
[00191] Если вывод Q 850 задан на 0 (ни одно из первого и второго применений не приводит к выдаче запроса 820 на блокирование) и если индикация 854 линии нагрузки задана на 1, переключатель 856 выдает запрос 858 на разблокирование, требование крутящего момента от пользователя не превышает линию нагрузки двигателя в этот момент времени (третья ситуация не приводит к выдаче запроса 820 на блокирование). Если вывод Q 850 задан на 0, а индикация 854 линии нагрузки задана на 0, переключатель 856 не выдает запрос 858 на разблокирование.
[00192] Фигуры 19а-19е представляют логические диаграммы, показывающие операции способа управления ДОП 302 на основе условий езды. Последовательность 900 содержит множество операций, некоторые из которых могут быть выполнены в переменном порядке, некоторые операции, возможно, выполняются одновременно, а некоторые операции являются необязательными. Последовательность 900 может быть реализована в транспортном средстве, например, транспортном средстве 40. В последовательности 900 операция 910 включает определение по меньшей мере одного параметра, указывающего на условие езды транспортного средства 40. На операции 920 обнаруживается скользкое условие езды на основе по меньшей мере одного параметра. В ответ на обнаружение, выполненное на операции 930, ДОП 302 выборочно блокируется на операции 930. ДОП 302 может быть выборочно заблокирован на операции 940, когда скользкие условия езды больше не обнаруживаются.
[00193] Операции 910 и 920 необязательно могут включать подпоследовательности 950 или 960, 970 или 980 (Фигуры 19b-19е) или комбинации этих подпоследовательностей.
[00194] В подпоследовательности 950 подоперации 952 и 954 соответственно включают определение скорости транспортного средства 40 и крутящего момента двигателя 62. Скользкие условия езды обнаруживаются на подоперации 956 путем определения того, что крутящий момент двигателя превышает линию нагрузки двигателя 62 для скорости транспортного средства 40.
[00195] В подпоследовательности 960 на подоперации 962 определяется скорость вращения левого колеса 44 и скорость вращения правого колеса 44, после чего скорости вращения левого и правого колес 44 сравниваются на подоперации 964. Случай возникновения проскальзывания колеса обнаруживается на подоперации 966, если разница между скоростями вращения левого и правого колес 44 превышает заранее определенную максимальную разницу скоростей вращения. Заранее определенная максимальная разница скоростей вращения может быть задана на ноль (0) об/мин или на большее значение.
[00196] Подпоследовательность 970 содержит подпоследовательность 960 для обнаружения случаев возникновения проскальзывания колеса. Подпоследовательность 960 повторяется множество раз, и счетчик количества случаев возникновения проскальзывания колеса учитывается на подоперации 972. Скользкие условия езды обнаруживаются на подоперации 974, когда количество случаев возникновения проскальзывания колеса превышает заранее определенное количество случаев возникновения проскальзывания колеса, например, три (3) случая возникновения проскальзывания колеса. В конечном итоге, на операции 976 может быть обнаружено то, что крутящий момент двигателя ниже чем значение низшего порогового значения, в случае чего операция 978 сбрасывает счетчик количества случаев возникновения проскальзывания колеса. Необязательно, счетчик количества случаев возникновения проскальзывания колеса также может быть сброшен, когда в течение заранее определенного периода времени не был обнаружен такой случай возникновения.
[00197] В подпоследовательности 980 на подоперации 982 к ДОП 302 применяется предварительная нагрузка. На подоперации 960 обнаруживается случай возникновения проскальзывания колеса. Скользкие условия езды обнаруживаются на подоперации 984, поскольку проскальзывание колеса обнаруживается тогда, когда ДОП 302 предварительно нагружен.
[00198] Каждая из операций последовательности 900 может быть сконфигурирована для обработки одним или более процессорами, один или более процессоров соединен с памятью, например, процессор 602 и память 604 блока управления, проиллюстрированного на Фигуре 14.
[00199] В реализации входной порт 606 принимает сигналы и измерения от датчиков 376, 378 скорости колеса, от датчика 380 скорости транспортного средства, а также от датчика 394 для мониторинга крутящего момента двигателя. Выходной порт 608 выдает команды на активатор 372 ДОП 302 и на соленоид 382 для нагрузки и/или блокирования ДОП 302. Память 604 хранит конфигурационную информацию для управления ДОП 302, в том числе, например, заранее определенную максимальную разницу скоростей вращения колес 44 для обнаружения проскальзывания колеса, заранее определенное количество случаев возникновения проскальзывания колеса для обнаружения последовательного проскальзывания колеса, таблицу 824 соответствия линии нагрузки, размер колеса и/или заданную точку 842 низшего крутящего момента.
[00200] При работе процессор 602 анализирует измерения и сигналы от одного или более из датчиков 376, 378 скорости колеса, датчика 380 скорости транспортного средства и датчика 394 для мониторинга крутящего момента двигателя. Процессор 602 обнаруживает скользкие условия езды на основе по меньшей мере одного параметра, указывающего на условия езды транспортного средства 40, по меньшей мере один параметр принимается на входном порту 606. Процессор 602 управляет, посредством выходного порта 608, блокированием ДОП 302 в ответ на обнаружение скользких условий езды. В различных реализациях процессор 602 может обнаруживать скользкие условия езды с помощью одной или более из следующих технологий.
[00201] Например, процессор 602 может сравнивать скорости вращения левого и правого колес 44, сообщаемые датчиками 376, 378 скорости колеса, и обнаруживать случай возникновения проскальзывания колеса, если разница между скоростями вращения левого и правого колес 44 превышает заранее определенную максимальную разницу скоростей вращения, сохраненную в памяти 604. Процессор может обнаруживать скользкие условия езды, когда количество случаев возникновения проскальзывания колеса превышает заранее определенное количество случаев возникновения проскальзывания колеса, сохраненное в памяти 604. Как указано в настоящем документе выше, счетчик количества случаев возникновения проскальзывания колеса может быть сброшен, когда выходной крутящий момент 808 двигателя падает ниже заданной точки 842 низшего крутящего момента или необязательно по прошествии заранее определенного периода времени без случая возникновения какого-либо проскальзывания колеса.
[00202] В другом примере процессор 602 побуждает выходной порт 608 к передаче команды на применение предварительной нагрузки к ДОП 302, например, в ответ на обнаружение первого случая возникновения проскальзывания колеса или по другим причинам. Процессор 602 обнаруживает скользкие условия езды, когда обнаружен случай возникновения проскальзывания колеса при применении предварительной нагрузки к ДОП 302.
[00203] Еще в одном другом примере процессор 602 может определять скорость транспортного средства на основе измерения скорости, принятого на входном порту 606 от датчика 380 скорости транспортного средства, или на основе среднего значения скоростей вращения левого и правого передних колес 44, согласно измерениям датчиков 376, 378 скорости колеса, умножая размер передних колес 44 для определения скорости транспортного средства. Затем процессор 602 считывает из таблицы 824 соответствия линии нагрузки, сохраненной в памяти 604, значение ожидаемого крутящего момента двигателя, соответствующее скорости транспортного средства. Процессор 602 обнаруживает скользкие условия езды, когда измерение выходного крутящего момента двигателя превышает значение ожидаемого крутящего момента двигателя.
[00204] Когда процессор 602 выполнил блокирование ДОП 302 в ответ на обнаружение скользких условий езды, процессор 602, в конечном итоге, может управлять разблокированием ДОП 302. Для этой цели, процессор 602 может обнаруживать то, что больше не имеет место ни одно из условий для обнаружения скользких условий езды на основе одного или более показаний с различных датчиков. Затем процессор 602 может управлять разблокированием ДОП 302 посредством выходного порта 608. В частности, процессор 602 может реализовать различные блоки из блок-диаграммы 800.
Управление ДОП 302 на основе положения средства управления ускорителем (Режим сильного бездорожья)
[00205] Еще в одном дополнительном аспекте настоящей технологии представлено управление ДОП 302, соединенным с ведомыми колесами 44 транспортного средства 40, это управление по меньшей мере частично основано на положении средства управления ускорителем. Резкая активация средства управления ускорителем, которую также в разговорной речи называют «холшот-стартом», в некоторых условиях может привести к применению высокой нагрузки к ДОП 302 для предотвращения проскальзывания колеса. Ввиду улучшения путевой устойчивости, к ДОП 302 также может быть применена стабилизирующая нагрузка, когда скорость транспортного средства 40 соответствует или превышает заранее определенное пороговое значение. По меньшей мере в одной реализации высокая нагрузка, примененная к ДОП 302 после резкой активации средства управления ускорителем, может представлять собой максимально возможную нагрузку, которая может быть выдана электрическим двигателем 288.
[00206] В реализации пользователь транспортного средства 40 может активировать эту особенность, например, путем настройки тумблерного переключателя 65 (Фигура 3) в режим сильного бездорожья. После резкой активации средства управления ускорителем пользователем при очень низкой скорости транспортного средства, например, после старта с нулевой скорости, блок 370 управления может активировать применение высокой нагрузки к ДОП 302. Ожидается, что это предотвратит проскальзывание колеса перед тем, как оно фактически произойдет, или по меньшей мере существенно снизит величину возникающего проскальзывания колеса в результате высокого начального ускорения. Стабилизирующая нагрузка также выборочно применяется к ДОП 302, когда скорость транспортного средства превышает заранее определенное пороговое значение скорости. Эта стабилизирующая нагрузка уменьшает потенциальное проскальзывание передних колес 44 при высоких скоростях транспортного средства, а, следовательно, улучшает путевую устойчивость транспортного средства 40.
[00207] Фигура 20 представляет собой блок-диаграмму, показывающую внутренние операции блока 370 управления для управления ДОП 302 в режиме сильного бездорожья, согласно реализации. Блок-диаграмма 660 показывает, что блоком 370 управления может быть использовано до трех (3) вводов для нагрузки ДОП в режиме сильного бездорожья. Предполагается, что в реализации блок 370 управления может использовать дополнительные вводы для определения в режиме сильного бездорожья. Один такой ввод представляет собой текущее положение 662 ускорителя, выражаемое в процентах, это значение выдается на блок 370 управления датчиком 392 средства управления ускорителем. Минимальная активация средства управления ускорителем, например, полное отпускание педали 91 ускорителя, может быть выражено как значение 0%. Максимальная активация средства управления ускорителем, например, полное нажатие педали 91 ускорителя, может быть выражено как значение 100%. Другой ввод представляет собой текущий выходной крутящий момент 664 двигателя, выражаемый в Нм, это значение выдается на блок 370 управления датчиком 394 для мониторинга крутящего момента двигателя. Еще один другой ввод представляет собой скорость 666 транспортного средства, которая может быть выдана на блок 370 управления датчиком 380 скорости транспортного средства. В качестве альтернативы, скорость 666 транспортного средства эквивалентным образом может быть основана на измерениях скоростей вращения левого и правого колес 44, выполненных датчиками 376, 378 скорости колеса, скорость 666 транспортного средства логически выведены блоком 370 управления на основе этих измерений и размеров передних колес 44. Эти вводы применяются к различным блокам в пределах блок-диаграммы 660.
[00208] Положение 662 ускорителя применяется к блоку 668 порогового значения положения ускорителя, который определяет заранее определенное пороговое значение положения ускорителя, которое в целом может быть рассмотрено как указывающее на полную активацию средства управления ускорителем. Это пороговое значение составляет, например, 90% нажатия педали 91 ускорителя в неограничивающем примере на Фигуре 20. Также предполагаются другие пороговые значения вплоть до 100%, а также более низкие значения. Когда положение 662 ускорителя соответствует или превышает заранее определенное пороговое значение положения ускорителя, блок 668 порогового значения положения ускорителя выдает команду 670 нагрузки, применяемую к переключателю 672 в качестве первого ввода.
[00209] Скорость 666 транспортного средства применяется к блоку 674 порогового значения стабилизации поворота, который определяет заранее определенное пороговое значение скорости. Это пороговое значение составляет 40 км/ч в неограничивающем примере на Фигуре 20. Также предполагаются более высокие и более низкие пороговые значения. Когда скорость 666 транспортного средства соответствует или превышает заранее определенное пороговое значение скорости, блок 674 порогового значения стабилизации поворота выдает присвоение 676 крутящего момента, определяющее фиксированное значение крутящего момента, например, 350 Нм, это значение выбирается таким образом, что стабилизирующая нагрузка применяется к ДОП 302, стабилизирующая нагрузка меньше чем высокая нагрузка. Для предотвращения перегрева электрического двигателя 288, после применения стабилизирующей нагрузки к ДОП 302 следует команда на блокирование ДОП 302 путем активации соленоида 382, после чего запитка электрического двигателя 288 может быть отключена.
[00210] Выходной крутящий момент 664 двигателя и скорость 666 транспортного средства применяются к таблице соответствия сильного бездорожья. Таблица соответствия сильного бездорожья проиллюстрирована в виде блока 678 на Фигуре 20. Блок 678 обеспечивает графическое представление таблицы соответствия сильного бездорожья. Таблица VI представляет неограничивающий пример содержимого таблицы соответствия сильного бездорожья, которая может быть использована блоком 370 управления для управления применением нагрузки к ДОП 302. Как и в случае Таблиц II и III, Таблица VI показывает значения для применения к муфте 374 ДОП 302 в ньютон-метрах (Нм) в зависимости от крутящего момента двигателя 62, также в Нм, и в зависимости от скорости транспортного средства 40, скорость выражается как в километрах в час (км/ч), так и в виде среднего значения скоростей вращения левого и правого колес 44 в оборотах в минуту (об/мин).
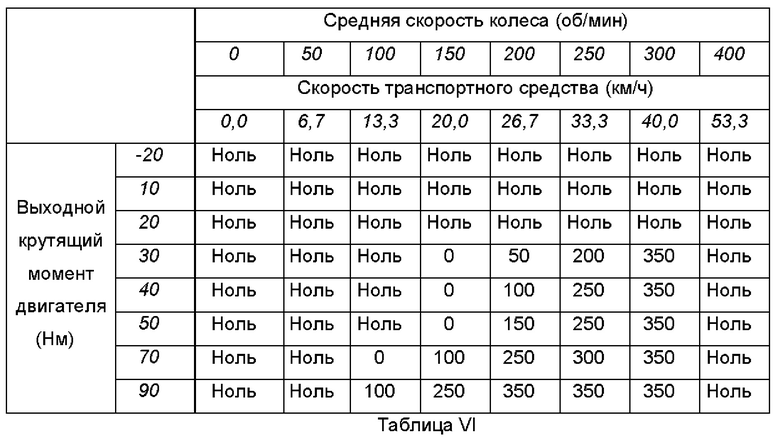
[00211] Применение выходного крутящего момента 664 двигателя и скорости 666 транспортного средства к таблице соответствия сильного бездорожья выдает значение 680 крутящего момента, которое может быть значением Ноль, значение 680 крутящего момента выдается блоком 678. Значение 680 крутящего момента является вторым вводом для переключателя 672. Третьим вводом для переключателя 672 является заранее определенный параметр 682 крутящего момента при высокой нагрузке, равняющийся значению 750 Нм в настоящей реализации.
[00212] Переключатель 672 работает следующим образом. Если команда 670 нагрузки присутствует на его первом вводе, переключатель 672 выдает другое присвоение 684 крутящего момента, имеющее значение, равное заранее определенному параметру 682 крутящего момента при высокой нагрузке. Если команда 670 нагрузки отсутствует на первом вводе переключателя 672, присвоение 684 крутящего момента задается на значение 680 крутящего момента, которое может быть значением Ноль.
[00213] Можно отметить, что в реализации на Фигуре 20 блок 668 порогового значения положения ускорителя может выдавать команду 670 нагрузки при любой скорости транспортного средства при условии, что текущее положение 662 ускорителя соответствует или превышает заранее определенное пороговое значение положения. По этой причине, присвоение 684 крутящего момента может быть задано на значение крутящего момента 750 Нм параметра 682 крутящего момента при высокой нагрузке всякий раз, когда средство управления ускорителем полностью зацеплено. Воздействие команды 670 нагрузки может быть проигнорировано блоком 370 управления, когда блок 370 управления выбирает присвоение 676 крутящего момента ввиду того, что оно является ненулевым значением, как это происходит, когда скорость 666 транспортного средства составляет по меньшей мере 40 км/ч, эффективно нейтрализуя воздействие оценки 684 крутящего момента и команды 670 нагрузки. Когда присвоение 676 крутящего момента является нулевым, поскольку скорость транспортного средства менее чем 40 км/ч, блок 370 управления выбирает присвоение 684 крутящего момента, которое может иметь нулевое или ненулевое значение, а также может быть равно значению крутящего момента 750 Нм, когда присутствует команда 670 нагрузки. Блок 370 управления активирует применение выбранного одного из присвоений 676 или 684 крутящего момента к муфте 374 ДОП 302, если одно из присвоений 676 или 684 крутящего момента больше нуля.
[00214] Фигура 21 представляет собой логическую диаграмму, показывающую операции способа управления ДОП 302 на основе положения средства управления ускорителем. Последовательность 1000 содержит множество операций, некоторые из которых могут быть выполнены в переменном порядке, некоторые операции, возможно, выполняются одновременно, а некоторые операции являются необязательными. Последовательность 1000 может быть реализована в транспортном средстве, например, транспортном средстве 40. Транспортное средство 40 имеет двигатель, например, двигатель 62, двигатель имеет дроссельный регулятор, функционально соединенный со средством управления ускорителем, например, педалью 91 ускорителя, и дифференциал ограниченного проскальзывания (ДОП), например, ДОП 302.
[00215] В последовательности 1000 операция 1010 включает определение положения средства управления ускорителем датчиком 392 средства управления ускорителем. Необязательно на операции 1020 может быть определена скорость транспортного средства 40. В реализации операция 1020 может включать считывание скорости транспортного средства 40 с датчика 380 скорости транспортного средства. В другой реализации операция 1020 может включать подоперации 1022 и 1024. На подоперации 1022 датчики 376, 378 скорости колеса определяют скорости вращения левого и правого колес 44. Затем на операции 1024 определяется скорость транспортного средства 40 на основе среднего значения скоростей вращения левого и правого колес 44 и на основе размера левого и правого колес 44.
[00216] Независимо от этого, высокая нагрузка выборочно применяется к ДОП 302 на операции 1030 при условии, что положение средства управления ускорителем соответствует или превышает заранее определенное пороговое значение положения. Заранее определенное пороговое значение положения в целом можно рассматривать как указывающее на резкую активацию средства управления ускорителем, например, 90%. Необязательно, выборочное применение высокой нагрузки может зависеть от скорости транспортного средства 40, которая меньше чем заранее определенное пороговое значение скорости, например, значение 40 км/ч, определенное блоком 674 порогового значения стабилизации поворота на Фигуре 20.
[00217] После применения высокой нагрузки к ДОП 302 необязательно может следовать запитка соленоида 382 для блокирования ДОП 302, используя технологию, описанную в приведенном выше описании Фигуры 9.
[00218] В реализации, где определяется скорость транспортного средства 40, операция 1040 может включать прекращение высокой нагрузки, когда скорость транспортного средства 40 соответствует или превышает заранее определенное пороговое значение скорости. В той же самой или другой реализации операция 1050 может включать применение стабилизирующей нагрузки, когда скорость транспортного средства 40 соответствует или превышает заранее определенное пороговое значение скорости. В примере на Фигуре 20 блок 674 порогового значения стабилизации поворота определяет заранее определенное пороговое значение скорости.
[00219] Независимо от этого, когда на операции 1060 обнаруживается полное или частичное ослабление средства управления ускорителем, высокая нагрузка ослабляется на операции 1070. Частичное ослабление средства управления ускорителем может быть обнаружено, например, как только датчик 392 средства управления ускорителем сообщает положение средства управления ускорителем, которое больше не соответствует или не превышает заранее определенное пороговое значение положения.
[00220] Хотя высокая нагрузка не применяется к ДОП 302, положение средства управления ускорителем меньше чем заранее определенное пороговое значение положения, блок 370 управления на операции 1090 может применить выходной крутящий момент двигателя и скорость транспортного средства к таблице соответствия сильно бездорожья для считывания значения частичной нагрузки для применения к ДОП. Блок 370 управления управляет применением частичной нагрузки к ДОП на операции 1095. Частичная нагрузка, применяемая к ДОП, в большинстве обстоятельств ниже чем высокая нагрузка.
[00221] Значения заранее определенного порогового значения положения и заранее определенного порогового значения скорости являются лишь иллюстративными и не ограничивают настоящее раскрытие.
[00222] Фигура 22 представляет собой логическую диаграмму, показывающую операции способа управления ДОП 302 для стабилизации поворота транспортного средства. Последовательность 1100 также содержит множество операций, некоторые из которых могут быть выполнены в переменном порядке, некоторые операции, возможно, выполняются одновременно, а некоторые операции являются необязательными. Последовательность 1100 также может быть реализована в транспортном средстве 40.
[00223] На операции 1110 определяется скорость транспортного средства 40. Как и в случае последовательности 1100, скорость транспортного средства 40 может быть определена на основе измерений, выданных датчиком 380 скорости транспортного средства или датчиками 376, 378 скорости колеса. Стабилизирующая нагрузка выборочно применяется к ДОП 302 на операции 1120, когда скорость транспортного средства 40 больше, чем заранее определенное пороговое значение скорости. Таким образом, улучшается путевая устойчивость транспортного средства 40.
[00224] В реализации транспортное средство 40 может реализовывать последовательность 1000, описанную в настоящем документе выше со ссылкой на Фигуру 21. В другой реализации транспортное средство 40 может реализовывать последовательность 1100, описанную в настоящем документе выше со ссылкой на Фигуру 22. Еще в одной другой реализации транспортное средство 40 может реализовывать обе последовательности 1000 и 1100. Таким образом, эти последовательности могут быть реализованы независимо или совместно.
[00225] Каждая из операций последовательностей 1000 и 1100 может быть сконфигурирована для обработки одним или более процессорами, один или более процессоров соединен с памятью, например, процессор 602 и память 604 блока управления, проиллюстрированного на Фигуре 14.
[00226] В реализации входной порт 606 принимает сигналы и измерения от датчика 392 средства управления ускорителем и, необязательно, от датчиков 376, 378 скорости транспортного средства и/или от датчика 380 скорости транспортного средства. Выходной порт 608 выдает команды управления на активатор 372 ДОП 302 и на соленоид 382 для нагрузки и/или блокирования ДОП 302. Память 604 хранит конфигурационную информацию для управления ДОП 302, в том числе, например, размер левого и правого колес 44, заранее определенное пороговое значение положения и, необязательно, заранее определенное пороговое значение скорости и/или таблицу соответствия сильного бездорожья.
[00227] В ходе работы процессор 602 определяет команды управления для управления выборочным применением высокой нагрузки к ДОП 302, когда положение средства управления ускорителем, указанное датчиком 392 средства управления ускорителем, соответствует или превышает заранее определенное пороговое значение положение, сохраненное в памяти 604. Процессор 602 может принимать измерение скорости транспортного средства 40 от датчика 380 скорости транспортного средства или определять скорость транспортного средства 40 на основе среднего значения скоростей вращения левого и правого колес 44, выданных датчиками 376, 378 скорости колеса, и на основе размера левого и правого колес 44. Независимо от этого, если скорость транспортного средства 40 доступна, процессор 602 может управлять выборочным применением высокой нагрузки к ДОП 302, когда положение средства управления ускорителем, указанное датчиком 392 средства управления ускорителем, соответствует или превышает заранее определенное пороговое значение положение при условии, что скорость транспортного средства 40 меньше чем заранее определенное пороговое значение скорости, сохраненное в памяти 604. Процессор 602 может побудить выходной порт 608 к остановке команды управления на применение высокой нагрузки к ДОП 302, когда он проинформирован датчиком 392 средства управления ускорителем о том, что положение средства управления ускорителем находится ниже заранее определенного порогового значения положения, или когда скорость транспортного средства соответствует или превышает заранее определенное пороговое значение скорости.
[00228] В реализации после команды управления, направленной выходным портом 608, которая побуждает активатор 372 к применению высокой нагрузки, может следовать другая команда управления для блокирования ДОП 302 соленоидом 382.
[00229] Независимо от положения средства управления ускорителем, если скорость транспортного средства 40 известна, процессор 602 может определить то, что скорость транспортного средства 40 больше, чем заранее определенное пороговое значение скорости, сохраненное в памяти 604. В этом случае процессор 602 может побудить выходной порт 608 к направлению команды управления на ДОП 302 для применения стабилизирующей нагрузки. Стабилизирующая нагрузка ограничивает, но не нейтрализует, разницу скорости вращения между левым и правым колесами 44 транспортного средства 40 для улучшения путевой устойчивости.
[00230] Процессор 602 может принимать значение выходного крутящего момента двигателя, выданное датчиком 394 для мониторинга крутящего момента двигателя, через входной порт 606. Процессор применяет скорость транспортного средства и значение выходного крутящего момента двигателя к таблице соответствия сильного бездорожья, сохраненной в памяти 604, для считывания значения частичной нагрузки для применения к ДОП 302. Это частичная нагрузка выражается в виде крутящего момента для применения к муфте 374. Если положение средства управления ускорителем меньше чем заранее определенное пороговое значение положения, процессор 602 может побудить выходной порт 608 к передаче команды управления для управления применением частичной нагрузки к ДОП 302. Ссылаясь вновь на Фигуру 20, можно увидеть, что если на входе переключателя 672 присутствует команда 670 нагрузки, любое значение частичной нагрузки из таблицы соответствия сильного бездорожья игнорируется переключателем 672. Также можно увидеть, что если присвоение 676 крутящего момент имеет ненулевое значение, любое значений частичной нагрузки из таблицы соответствия сильного бездорожья также игнорируется блоком 370 управления.
[00231] Настоящее раскрытие вводит различные технологии для управления ДОП 302, примеры этих технологий приведены на диаграммах на Фигурах 12а, 12b, 13, 15, 16, 17, 19а-е, 20, 21 и 22. Конкретная реализация узла 300 дифференциала ограниченного проскальзывания, установленного в конкретном транспортном средстве 40, может включать в себя любую из этих технологий. Другая реализации может включать в себя все эти технологии. Еще одна другая реализации может включать в себя любую комбинацию этих технологий.
[00232] Способ, узел дифференциала и транспортное средство, реализованные в соответствии с некоторыми неограничивающими реализациями настоящей технологии, могут быть представлены как показано ниже в пронумерованных пунктах.
Пункты
[Пункт 1] Способ управления дифференциалом ограниченного проскальзывания (ДОП) транспортного средства, транспортное средство имеет двигатель, ДОП, а также левое и правое ведомые колеса, функционально соединенные с ДОП, способ включает:
определение текущего выходного крутящего момента двигателя;
определение положения средства управления ускорителем;
определение прогнозированного крутящего момента двигателя на основе текущего выходного крутящего момента двигателя и положения средства управления ускорителем;
определение скорости транспортного средства;
определение значения предварительной нагрузки для применения к ДОП, значение предварительной нагрузки основано на прогнозированном крутящем моменте двигателя и на скорости транспортного средства; и
применение предварительной нагрузки к ДОП, когда значение предварительной нагрузки больше нуля.
[Пункт 2] Способ по пункту 1, дополнительно включающий:
определение скоростей вращения левого и правого колес; и
определение среднего значения скоростей вращения левого и правого колес.
[Пункт 3] Способ по пункту 2, в котором определение скорости транспортного средства дополнительно включает определение скорости транспортного средства на основе среднего значения скоростей вращения левого и правого колес и на основе размера левого и правого колес.
[Пункт 4] Способ по любому из пунктов 1-3, в котором применение предварительной нагрузки к ДОП включает сжатие муфты ДОП для уменьшения разницы скорости вращения левого и правого колес.
[Пункт 5] Способ по пункту 4, в котором сжатие муфты ДОП включает использование электрического двигателя для приведения в действие набора шестерней и рампы для шариков для применения крутящего момента к муфте.
[Пункт 6] Способ по пункту 5, в котором сжатие муфты ДОП дополнительно включает использование соленоида для блокирования набора шестерней.
[Пункт 7] Способ по любому из пунктов 4-6, дополнительно включающий применение прогнозированного крутящего момента двигателя и скорости транспортного средства к таблице соответствия нагрузки для считывания значения крутящего момента, подлежащего применению для сжатия муфты.
[Пункт 8] Способ по пункту 7, дополнительно включающий:
определение положения переключателя коробки передач; и
выбор таблицы соответствия нагрузки из множества таблиц соответствия нагрузки в соответствии с положением переключателя коробки передач.
[Пункт 9] Способ по любому из пунктов 1-8, дополнительно включающий:
определение скорости изменения положения средства управления ускорителем стечением времени;
причем прогнозированный крутящий момент двигателя дополнительно основан на скорости изменения положения средства управления ускорителем с течением времени.
[Пункт 10] Способ по пункту 9, в котором определение прогнозированного крутящего момента двигателя включает добавление регулировки крутящего момента, пропорциональной скорости изменения положения средства управления ускорителем с течением времени, и текущего выходного крутящего момента двигателя.
[Пункт 11] Способ по пункту 9, в котором определение прогнозированного крутящего момента двигателя включает:
применение положение средства управления ускорителем и ограниченной по времени скорости изменения положения средства управления ускорителем с течением времени к таблице соответствия крутящего момента для получения оценки крутящего момента двигателя;
корректировку оценки крутящего момента двигателя на основе поправочного коэффициента средства управления ускорителем для определения проецированного крутящего момента;
определение поправки крутящего момента на основе текущего выходного крутящего момента двигателя и поправочного коэффициента крутящего момента; и
добавление проецированного крутящего момента и поправки крутящего момента.
[Пункт 12] Узел дифференциала для применения в транспортном средстве, имеющем двигатель, а также левое и правое ведомые колеса, узел дифференциала содержит:
дифференциал ограниченного проскальзывания (ДОП), выполненный с возможностью соединения с приводным валом и с левым и правым ведомыми колесами, ДОП адаптирован для передачи крутящего момента от приводного вала на левое и правое ведомые колеса;
датчик для мониторинга крутящего момента двигателя;
датчик средства управления ускорителем;
датчик скорости; и
блок управления, функционально соединенный с ДОП, с датчиком для мониторинга крутящего момента двигателя, с датчиком средства управления ускорителем и сдатчиком скорости, блок управления адаптирован для:
определения прогнозированного крутящего момента двигателя на основе измерения крутящего момента двигателя от датчика для мониторинга крутящего момента двигателя и положения средства управления ускорителем, выданного датчиком средства управления ускорителем;
определения скорости транспортного средства на основе измерения от датчика скорости;
определение значения предварительной нагрузки для применения к ДОП, значение предварительной нагрузки основано на прогнозированном крутящем моменте двигателя и на скорости транспортного средства; и
управления применением предварительной нагрузки к ДОП, когда значение предварительной нагрузки больше нуля.
[Пункт 13] Узел дифференциала по пункту 12, в котором датчик скорости измеряет скорости вращения левого и правого колес, и причем блок управления дополнительно адаптирован для определения среднего значения скоростей вращения левого и правого колес.
[Пункт 14] Узел дифференциала по пункту 12 или 13, дополнительно содержащий электрический двигатель, причем применение предварительной нагрузки к ДОП включает управление предварительной нагрузкой, применяемой электрическим двигателем к ДОП.
[Пункт 15] Узел дифференциала по пункту 14, в котором ДОП дополнительно содержит сжимаемую муфту, и причем управление применение предварительной нагрузки к ДОП включает сжатие муфты.
[Пункт 16] Узел дифференциала по пункту 15, в котором ДОП дополнительно содержит набор шестерней и рампу для шариков, зубчатая передача адаптирована для применения предварительной нагрузки от электрического двигателя на рампу для шариков для сжатия муфты.
[Пункт 17] Узел дифференциала по пункту 16, дополнительно содержащий соленоид, имеющий зубец, адаптированный для зацепления с набором шестерней, когда соленоид запитан, причем блок управления дополнительно адаптирован для управления соленоидом для блокирования ДОП.
[Пункт 18] Узел дифференциала по любому из пунктов 12-14, в котором блок управления содержит:
входной порт, адаптированный для приема измерений от датчика для мониторинга крутящего момента двигателя, от датчика средства управления ускорителем и от датчика скорости;
выходной порт, адаптированный для передачи команд управления на ДОП; и
процессор, функционально соединенный со входным портом и с выходным портом, процессор адаптирован для:
определения прогнозированного крутящего момента двигателя;
определения скорости транспортного средства;
определения значения предварительной нагрузки для применения к ДОП; и
побуждения выходного порта к передаче команды управления для применения предварительной нагрузки к ДОП, когда значение предварительной нагрузки больше нуля.
[Пункт 19] Узел дифференциала по пункту 18, в котором:
блок управления дополнительно содержит память, хранящую конфигурационную информацию для управления ДОП; и
процессор функционально соединен с памятью.
[Пункт 20] Узел дифференциала по пункту 19, в котором:
конфигурационная информация содержит таблицу соответствия нагрузки, содержащую множество значений крутящего момента для применения к сжимаемой муфте ДОП в зависимости от множества значений прогнозированного крутящего момента двигателя и в зависимости от множества значений скорости транспортного средства; и
процессор дополнительно адаптирован для применения прогнозированного крутящего момента двигателя и скорости транспортного средства к таблице соответствия нагрузки для определения значения входного крутящего момента для ДОП.
[Пункт 21] Узел дифференциала по пункту 20, дополнительно содержащий:
индикатор положения переключателя для выдачи индикации текущего передаточного отношения коробки передач транспортного средства;
причем:
конфигурационная информация содержит множество таблиц соответствия нагрузки, каждая таблица соответствия нагрузки содержит, для соответствующего передаточного отношения, множество значений крутящего момента для применения к сжимаемой муфте ДОП в зависимости от множества значений прогнозированного крутящего момента двигателя и в зависимости от множества значений скорости транспортного средства;
процессор дополнительно адаптирован для выбора одной из множества таблиц соответствия нагрузки на основе текущего передаточного отношения; и
процессор дополнительно адаптирован для применения прогнозированного крутящего момента двигателя и скорости транспортного средства к выбранному соответствию для определения значения крутящего момента, подлежащего применению для сжатия муфты.
[Пункт 22] Узел дифференциала по любому из пунктов 18-21, в котором процессор дополнительно адаптирован для:
приема, посредством входного порта, измерения крутящего момента двигателя;
приема, посредством входного порта, положения средства управления ускорителем;
приема, посредством входного порта, скорости изменения положения средства управления ускорителем стечением времени; и
вычисления поправочного коэффициента крутящего момента на основе скорости изменения положения средства управления ускорителем с течением времени;
причем прогнозированный крутящий момент двигателя определяется на основе поправочного коэффициента крутящего момента и измерения крутящего момента двигателя.
[Пункт 23] Узел дифференциала по любому из пунктов 18-21, в котором процессор дополнительно адаптирован для:
приема, посредством входного порта, измерения крутящего момента двигателя;
приема, посредством входного порта, последовательных сигналов, предоставляющих положения средства управления ускорителем;
определения скорости изменения положения средства управления ускорителем стечением времени; и
вычисления поправочного коэффициента крутящего момента на основе скорости изменения положения средства управления ускорителем с течением времени;
причем прогнозированный крутящий момент двигателя определяется на основе поправочного коэффициента крутящего момента и измерения крутящего момента двигателя.
[Пункт 24] Узел дифференциала по пункту 22 или 23, в котором процессор дополнительно адаптирован для определения прогнозированного крутящего момента двигателя путем добавления регулировки крутящего момента, пропорциональной скорости изменения положения средства управления ускорителем стечением времени, и измерения крутящего момента двигателя.
[Пункт 25] Узел дифференциала по пункту 22 или 23, в котором процессор дополнительно адаптирован для определения прогнозированного крутящего момента двигателя путем:
применения положения средства управления ускорителем и ограниченной по времени скорости изменения положения средства управления ускорителем с течением времени к таблице соответствия крутящего момента для получения оценки крутящего момента двигателя;
корректировки оценки крутящего момента двигателя на основе поправочного коэффициента средства управления ускорителем для определения проецированного крутящего момента;
определения поправки крутящего момента на основе измерения крутящего момента двигателя и поправочного коэффициента крутящего момента; и
добавления проецированного крутящего момента и поправки крутящего момента.
[Пункт 26] Транспортное средство, содержащее:
раму;
узел передней подвески, соединенный с рамой;
узел задней подвески, соединенный с рамой;
левое ведомое колесо и правое ведомое колесо, соединенные с одним из узлов передней и задней подвески;
по меньшей мере одно другое колесо соединено с другим из узлов передней и задней подвески;
двигатель, соединенный с рамой;
коробку передач, функционально соединенную с двигателем для приема крутящего момента от двигателя;
приводной вал, функционально соединенный с коробкой передач для передачи крутящего момента от коробки передач на левое и правое ведомые колеса; и
узел дифференциала по любому из пунктов 12-25, ДОП функционально соединен с приводным валом и функционально соединен с левым и правым ведомыми колесами.
[Пункт 27] Транспортное средство по пункту 26, дополнительно содержащее:
ведущий мост в блоке с коробкой передач для передачи крутящего момента от коробки передач на по меньшей мере одно другое колесо; и
устройство выбора, адаптированное для выборочного функционального соединения ДОП с приводным валом.
[00233] Специалисту в данной области техники могут быть понятны модификации и изменения вышеописанных реализаций настоящей технологии. Например, предполагается, что ДОП 302 может быть установлен в задней части транспортного средства 40 и функционально соединен с задними колесами 48, независимо от того, имеет ли транспортное средство 40 конфигурацию с приводом двух колес или с приводом всех колес. Приведенное выше описание предназначено для примера, а не в качестве ограничения. Таким образом, объем настоящей технологии не должен ограничиваться строго объемом прилагаемой формулы изобретения.
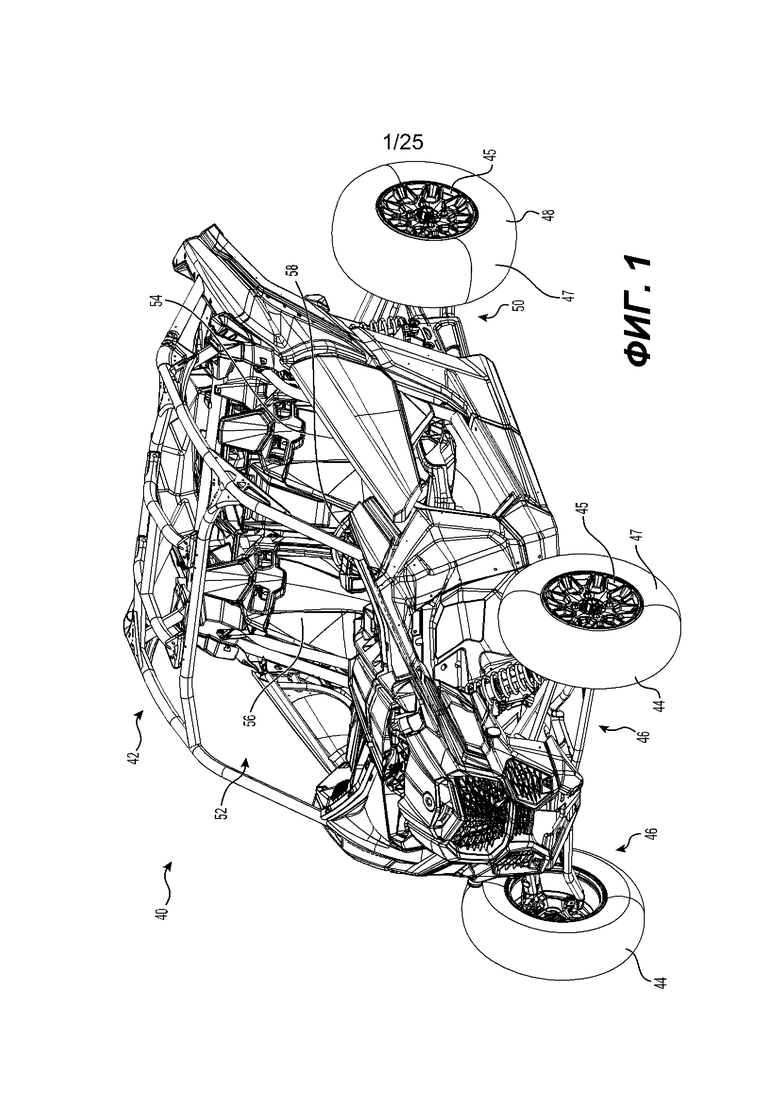
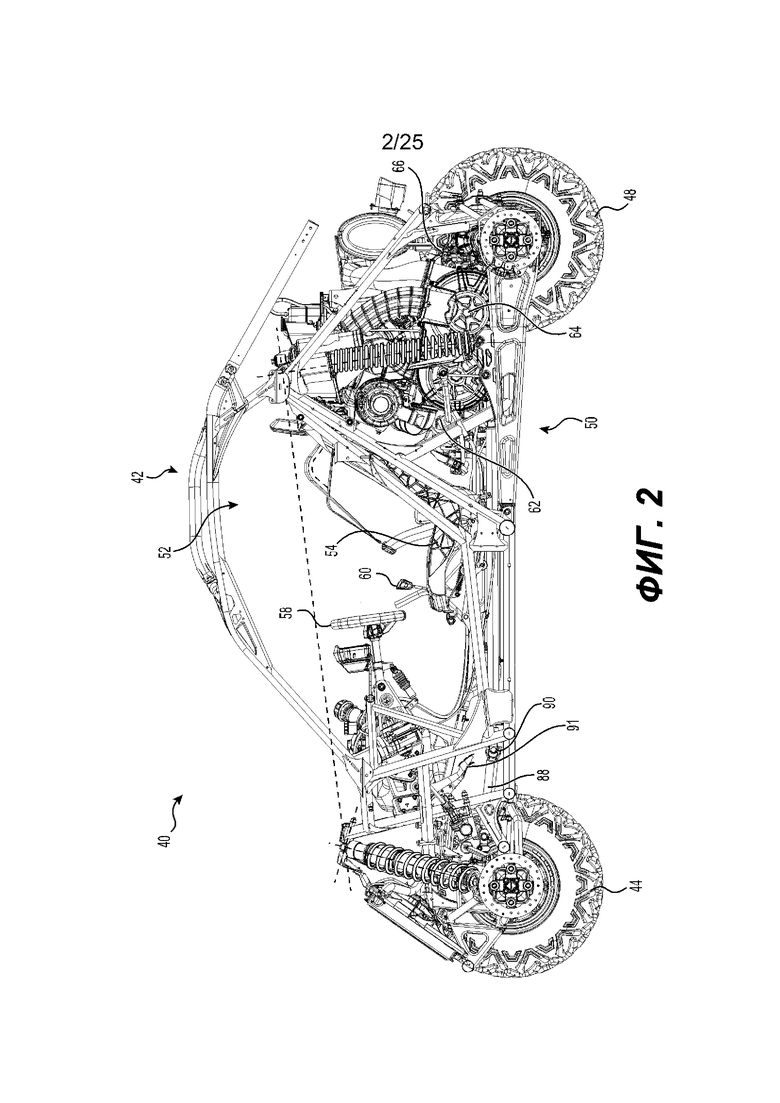
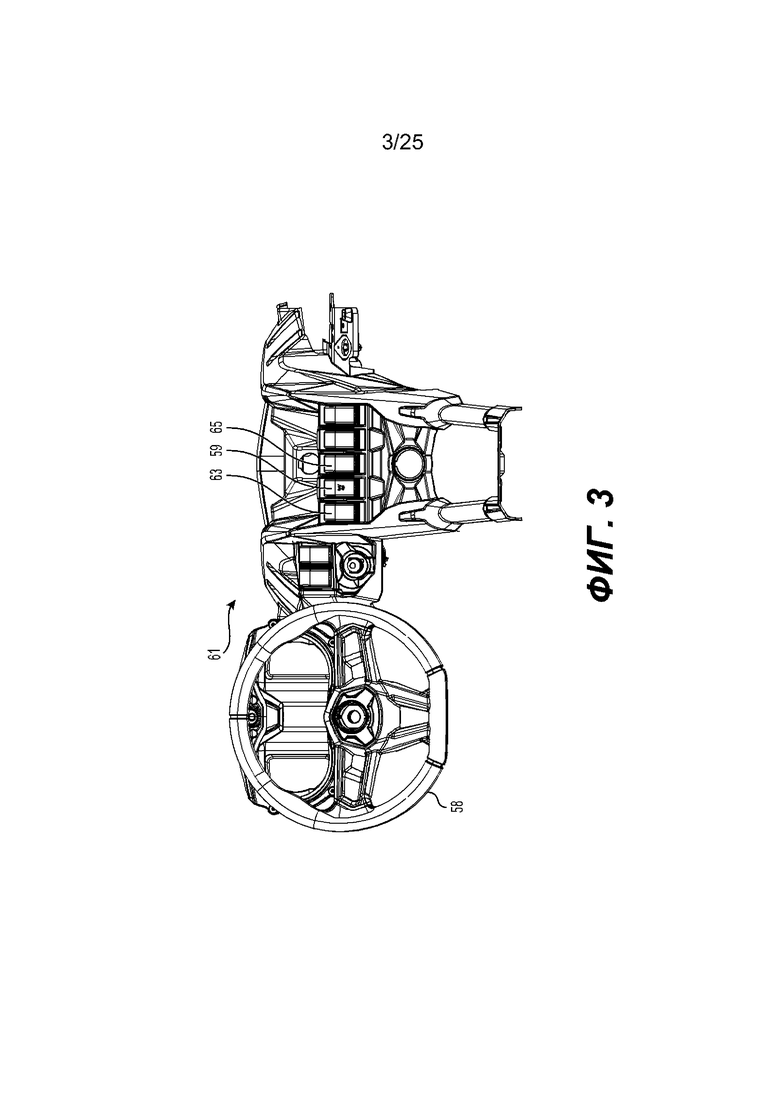
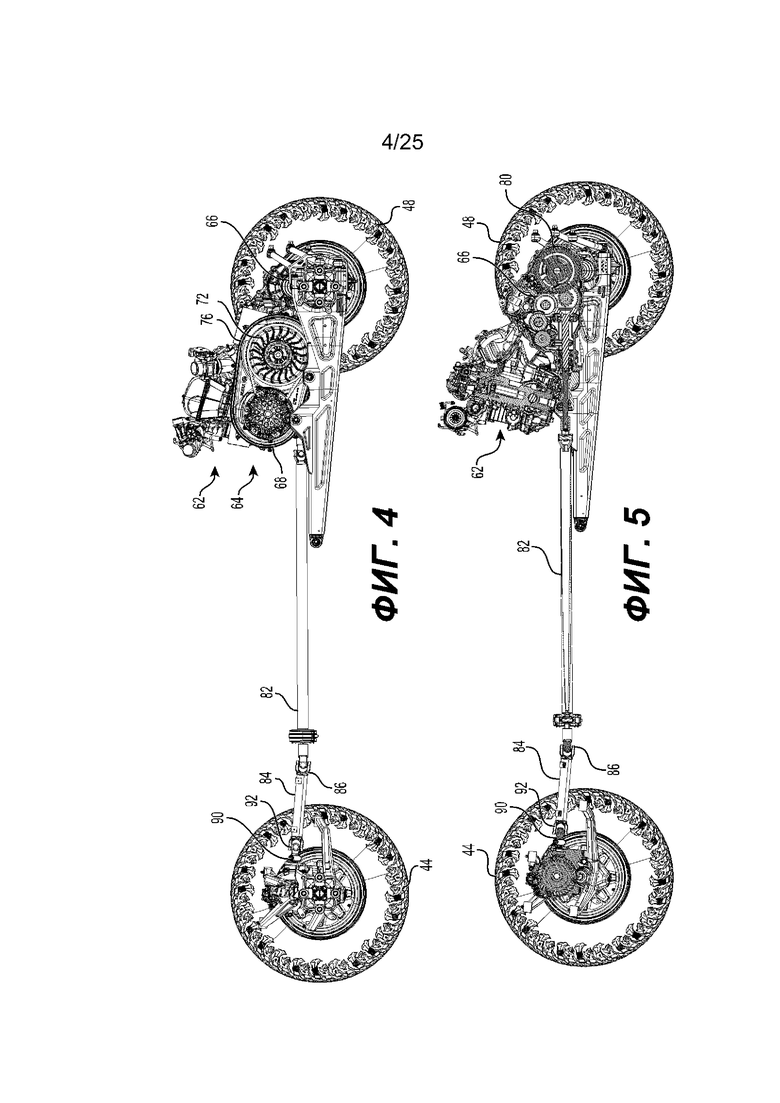
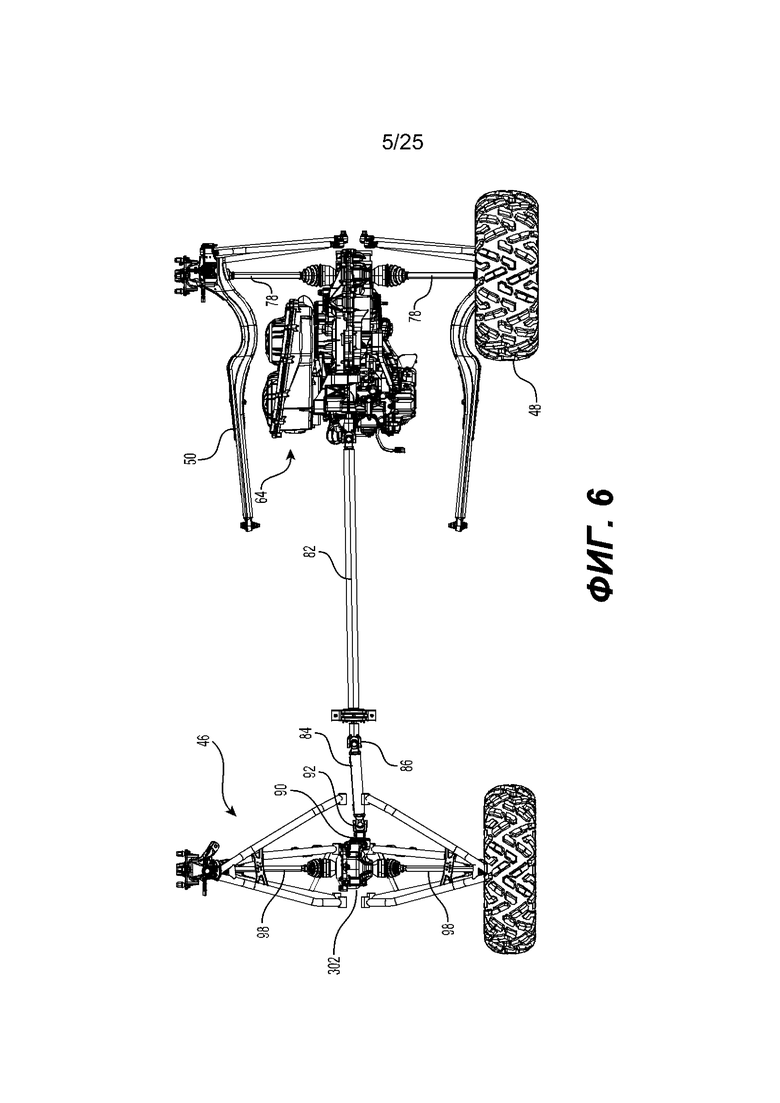
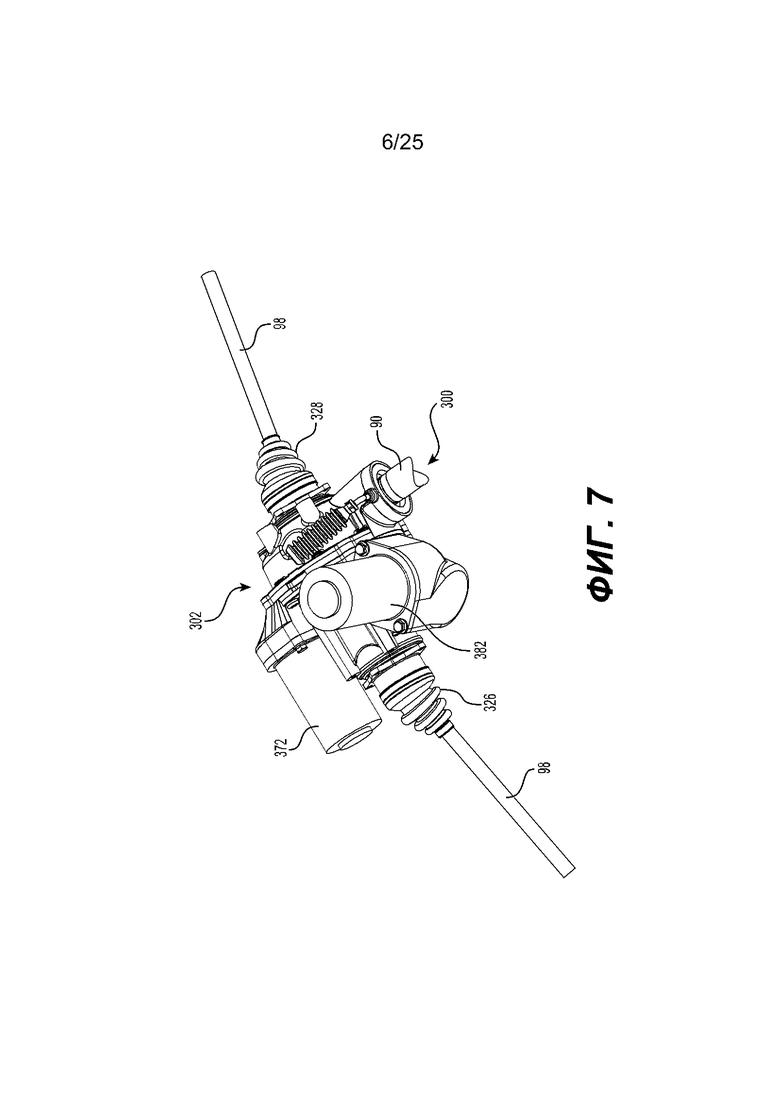
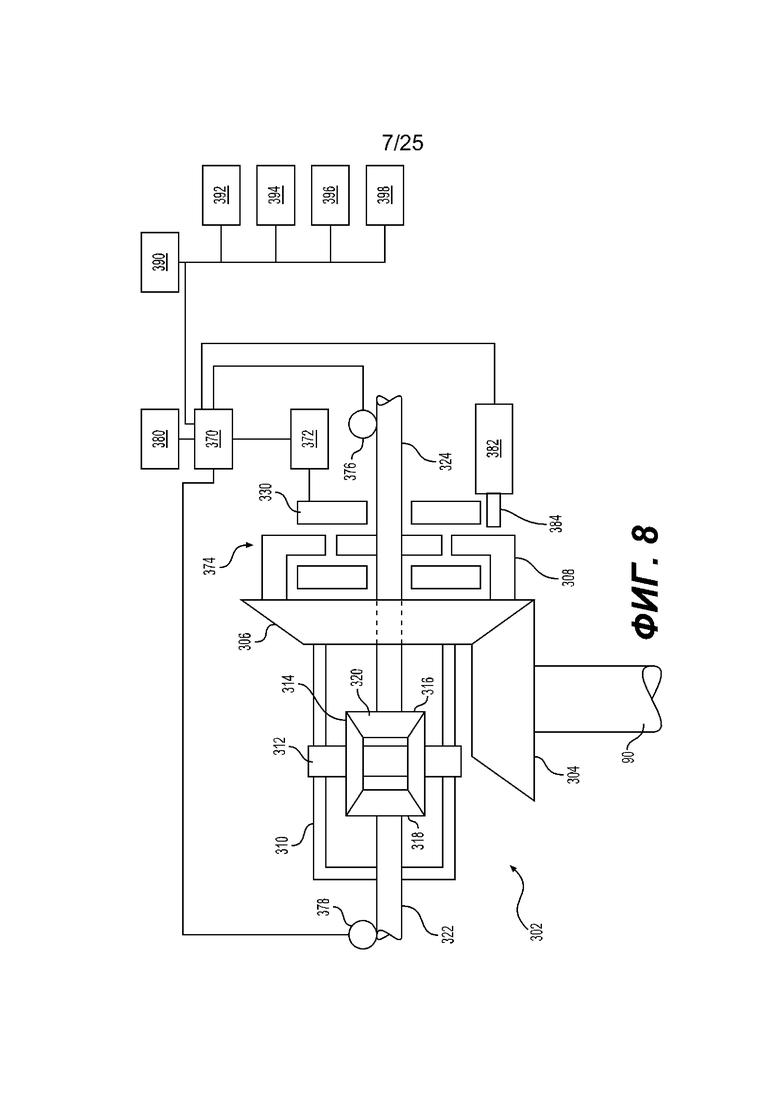
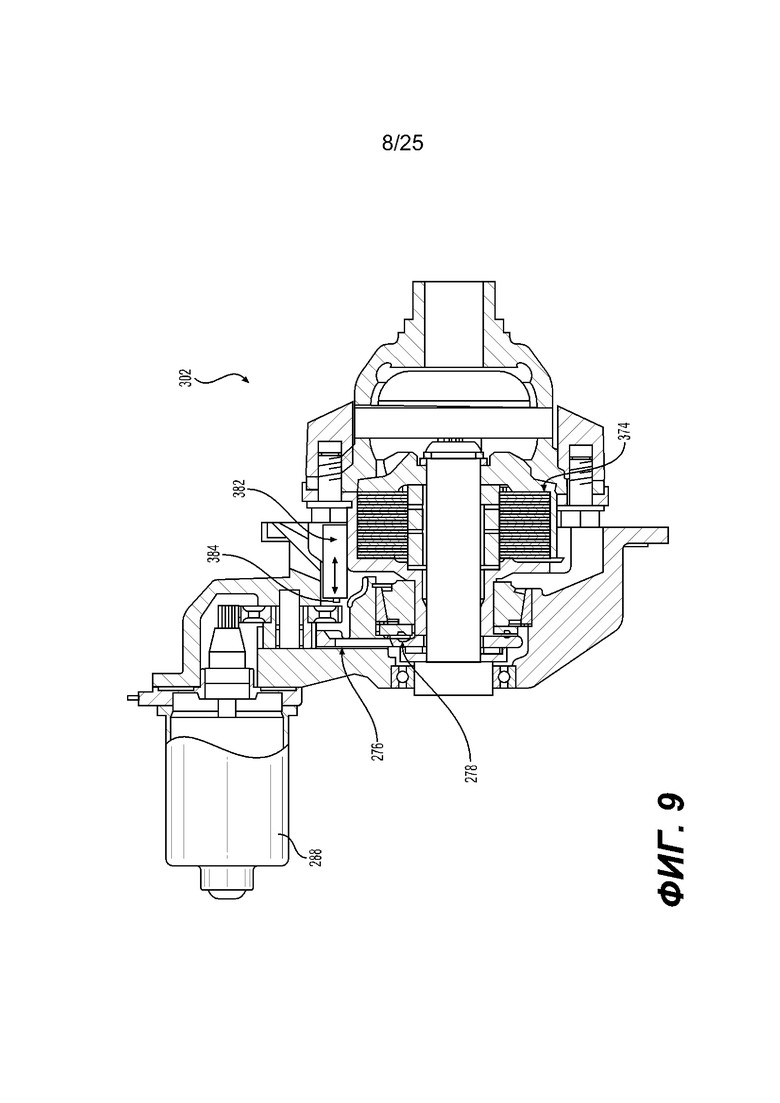
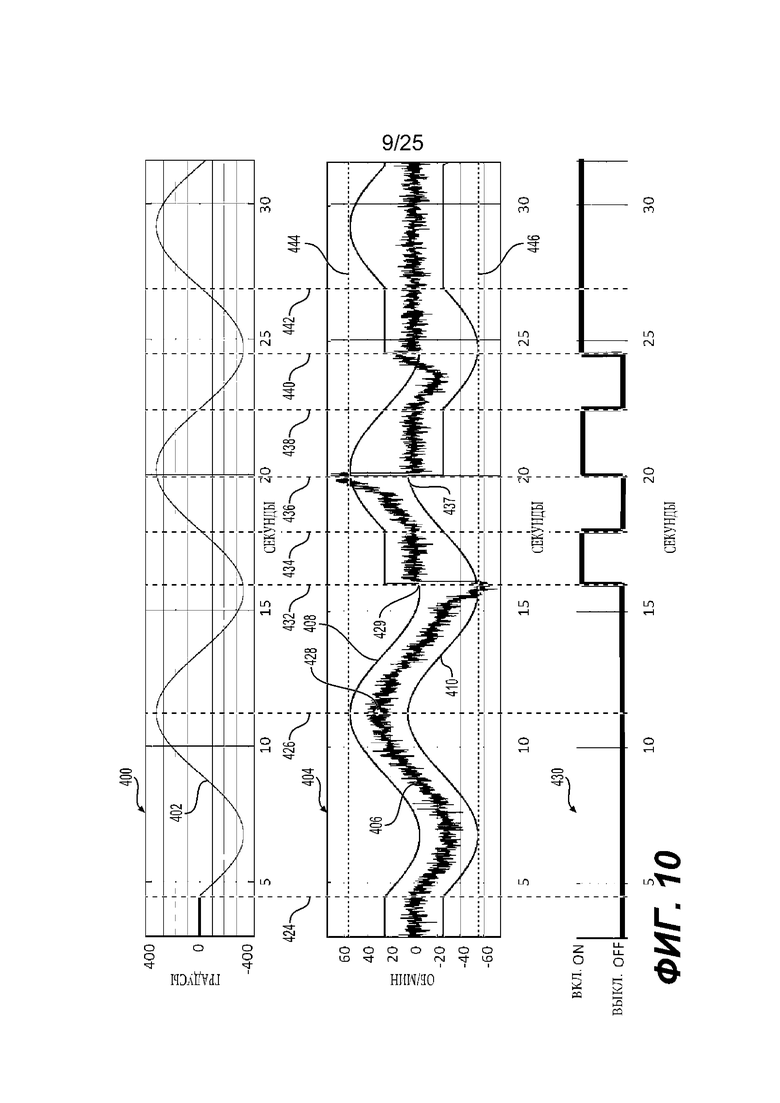
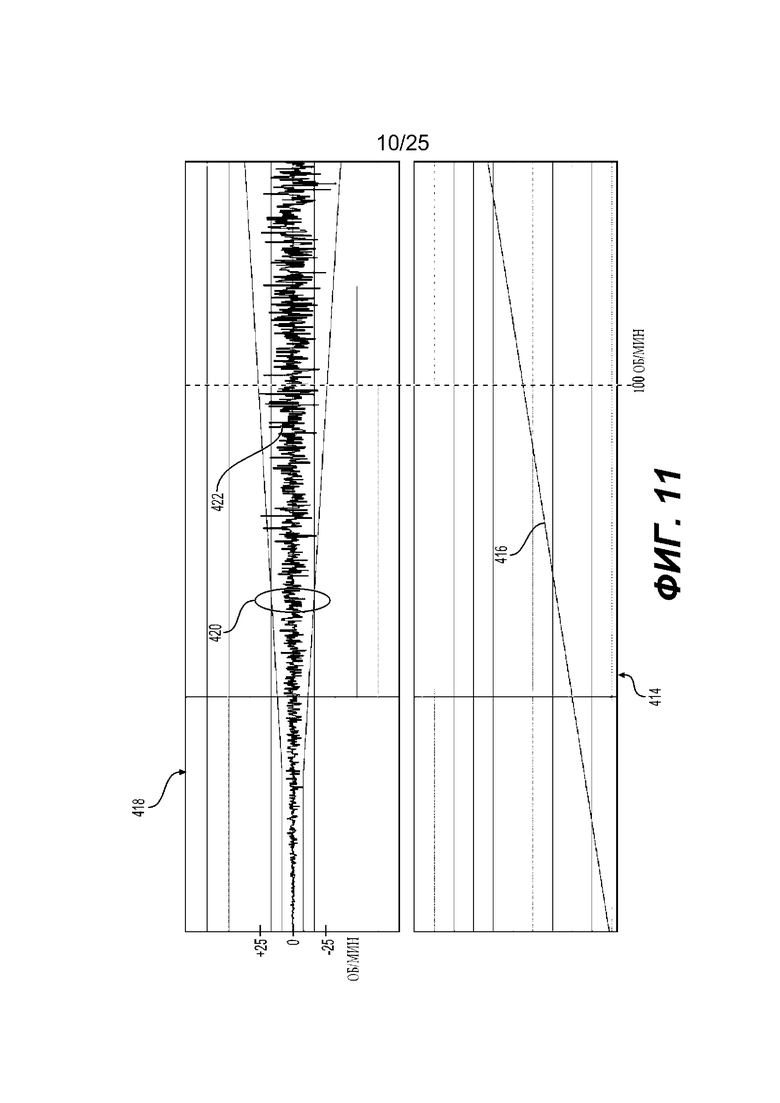
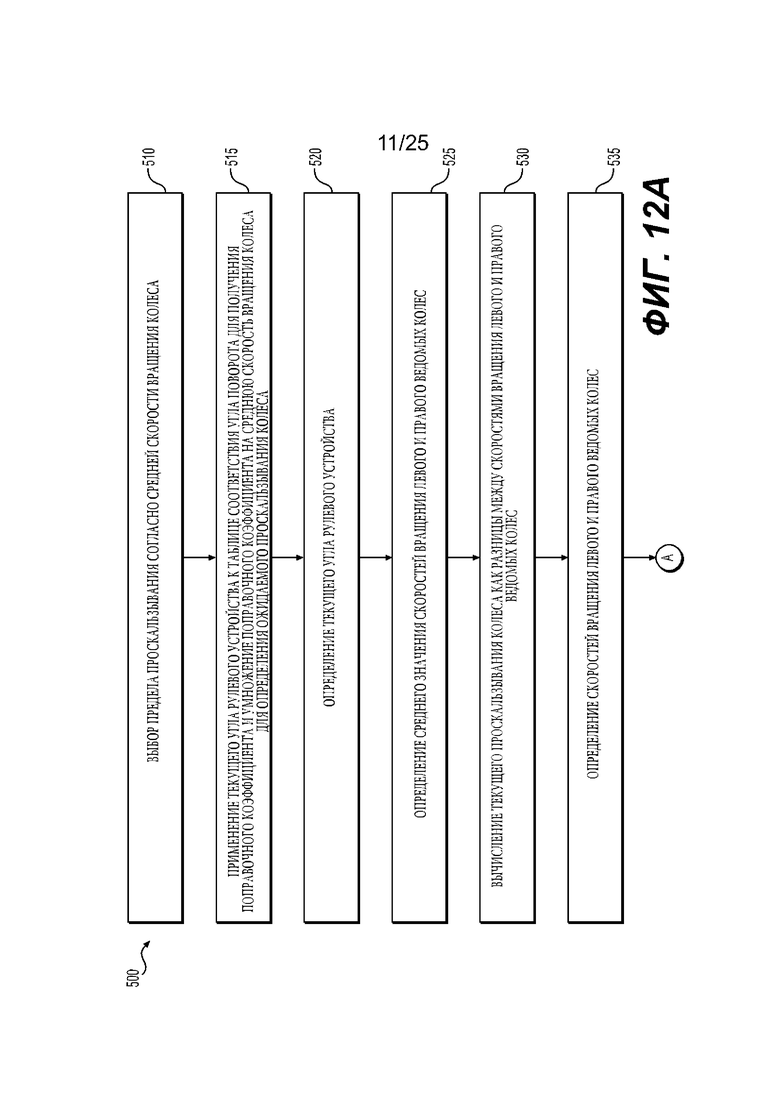
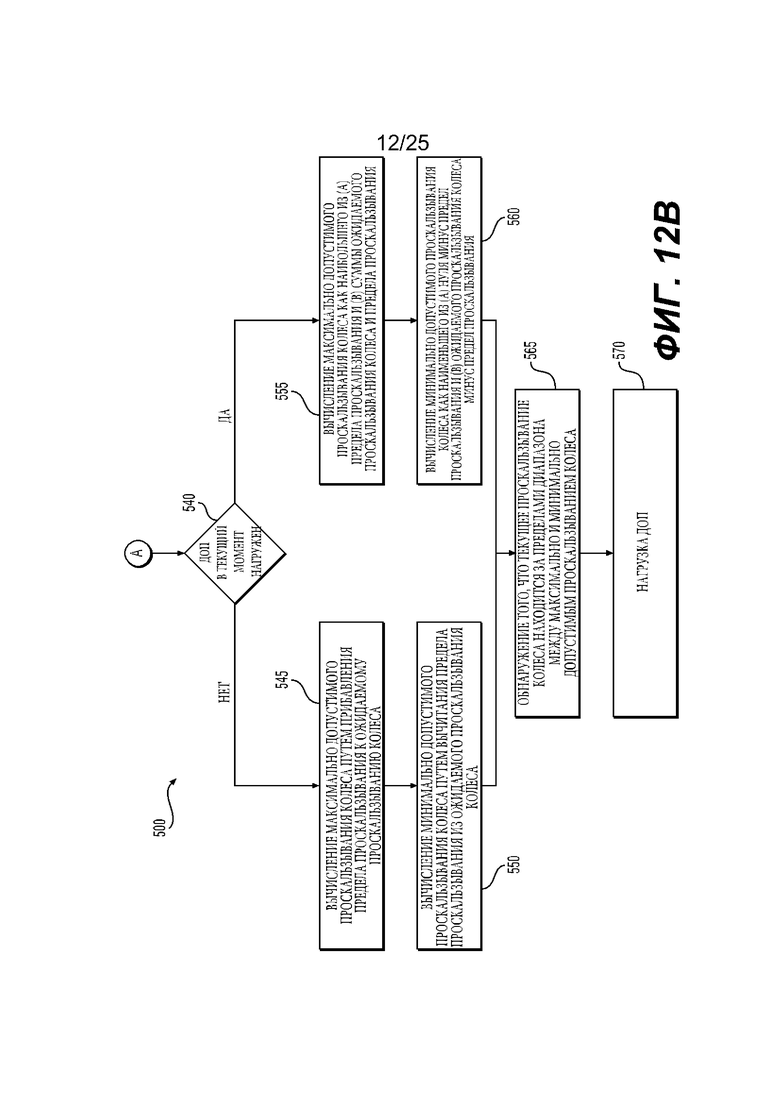
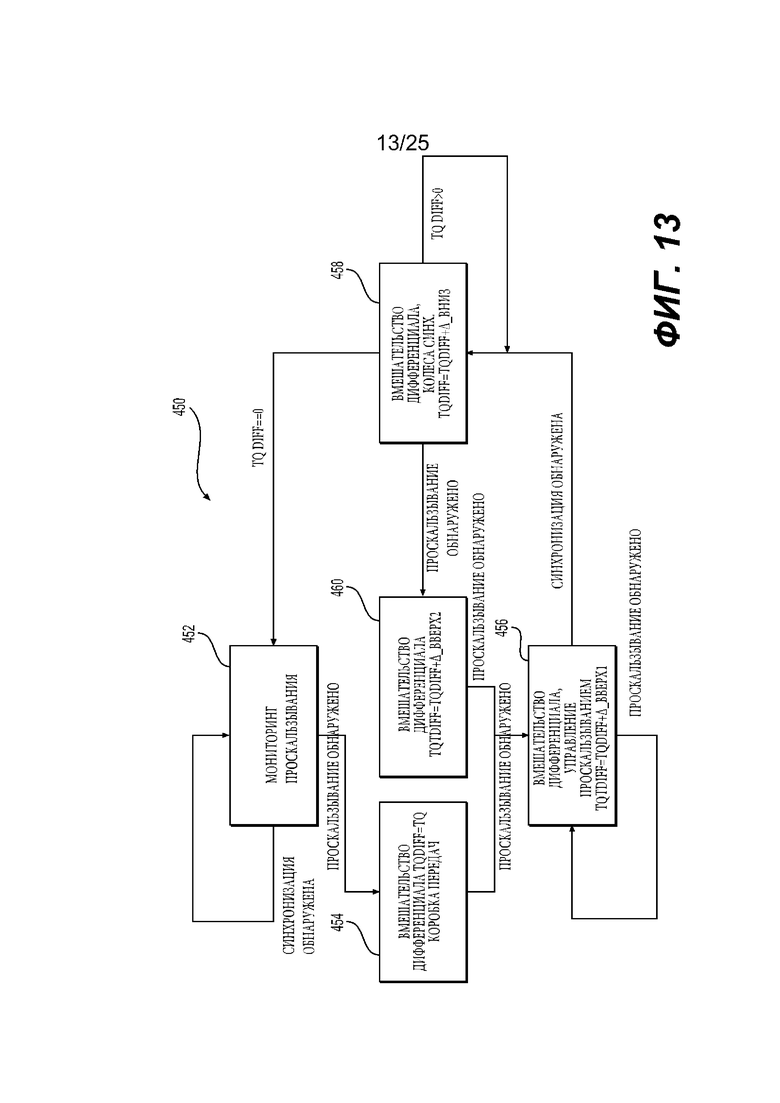
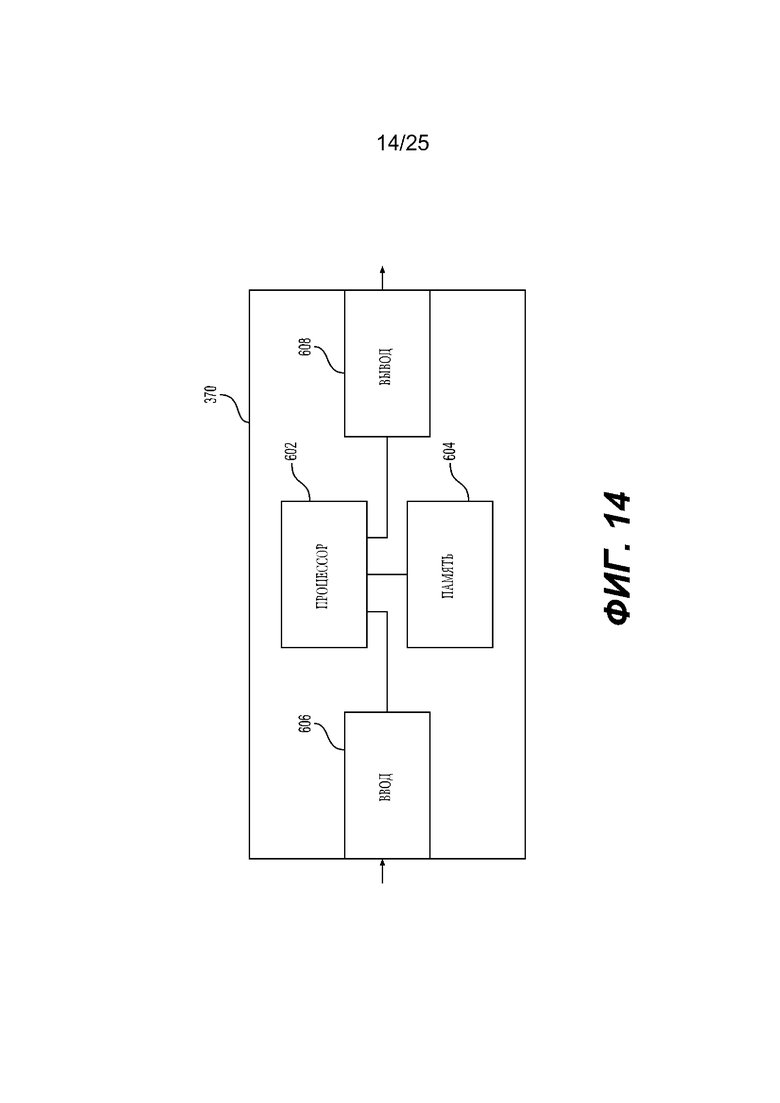
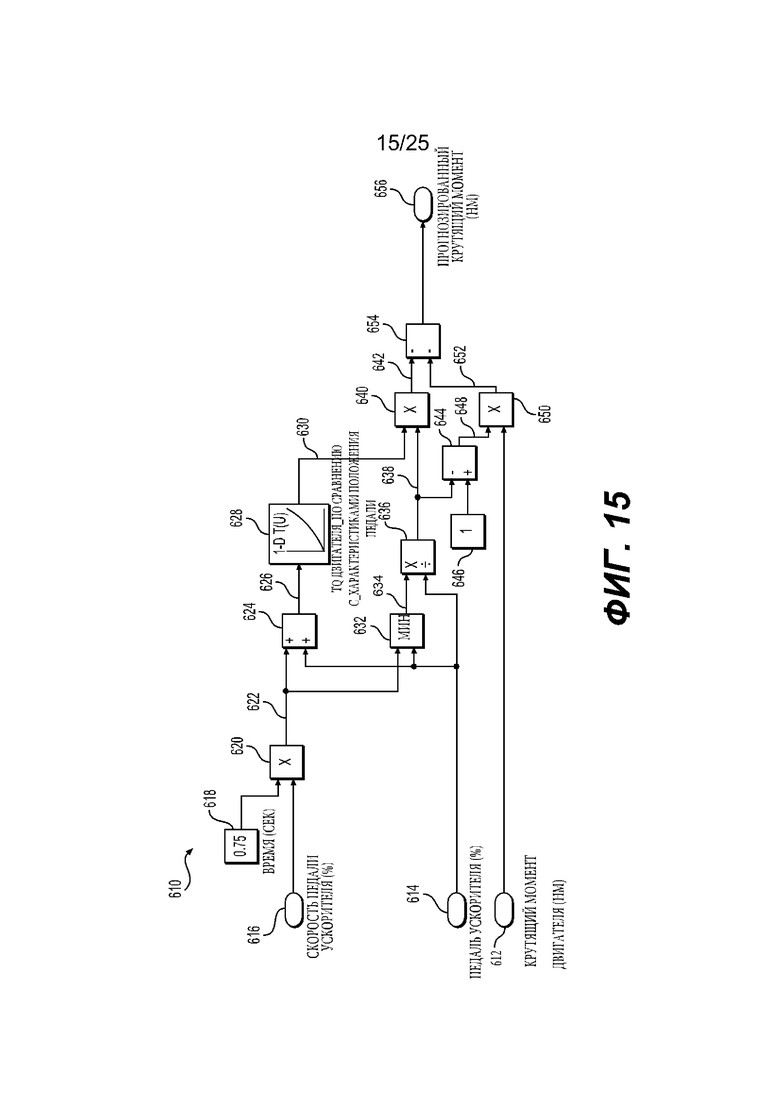
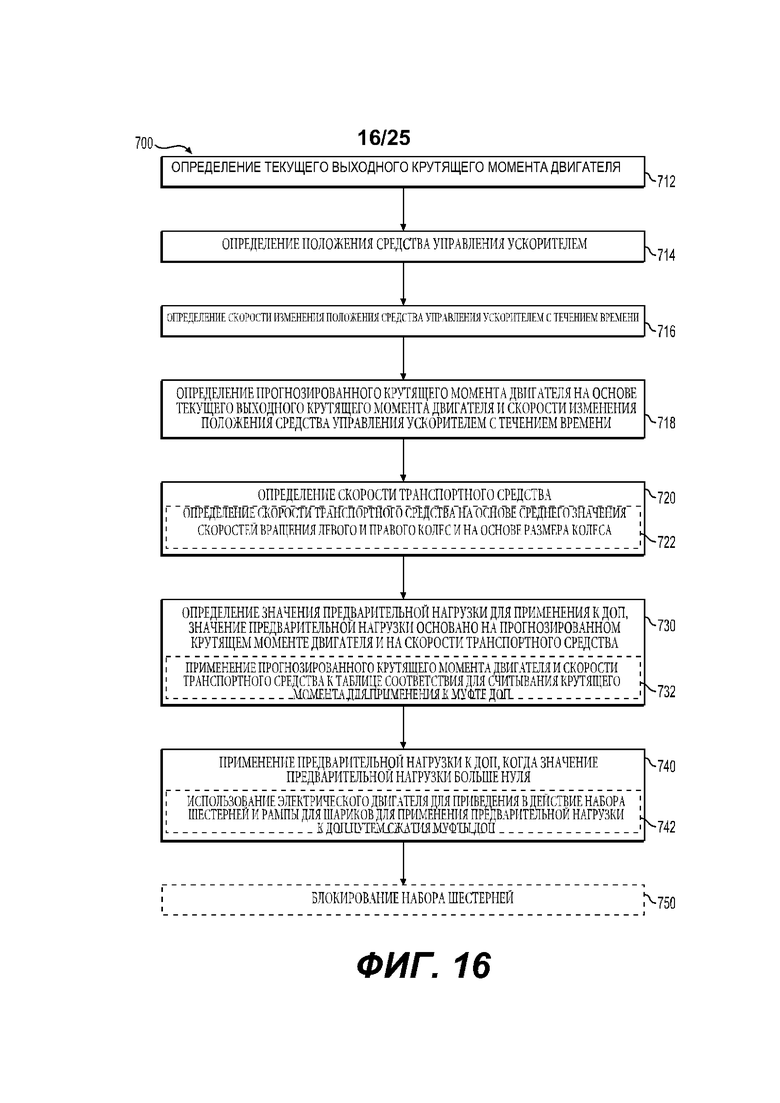
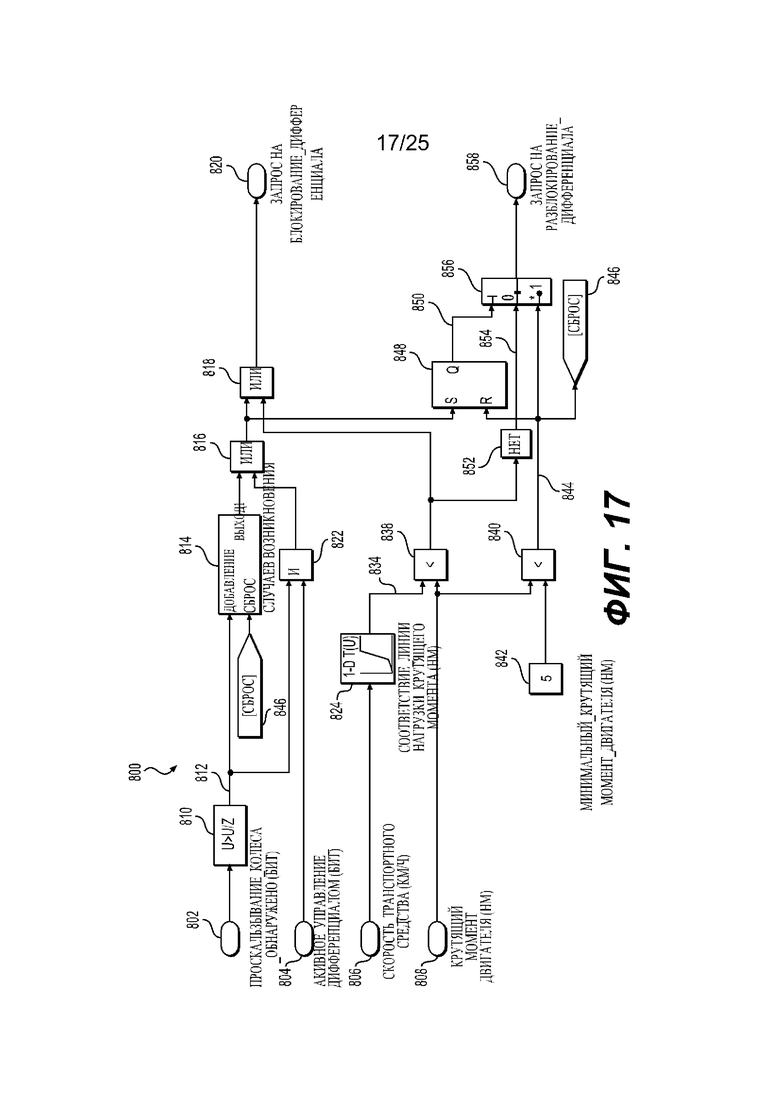
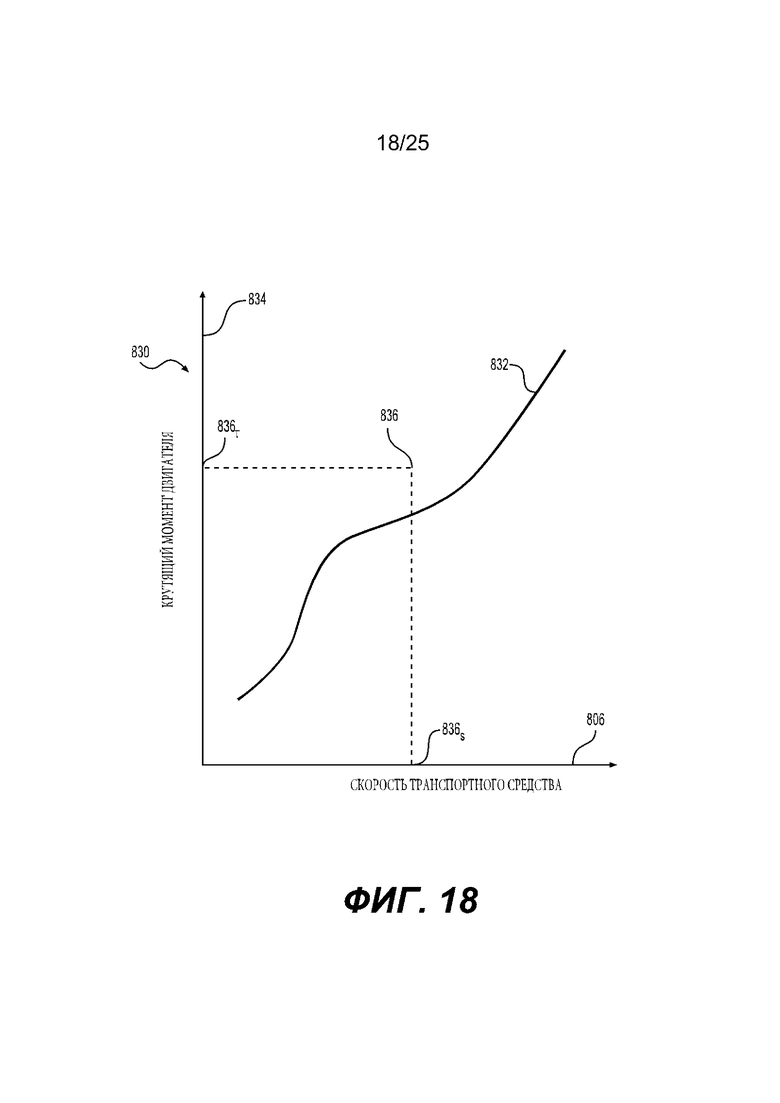
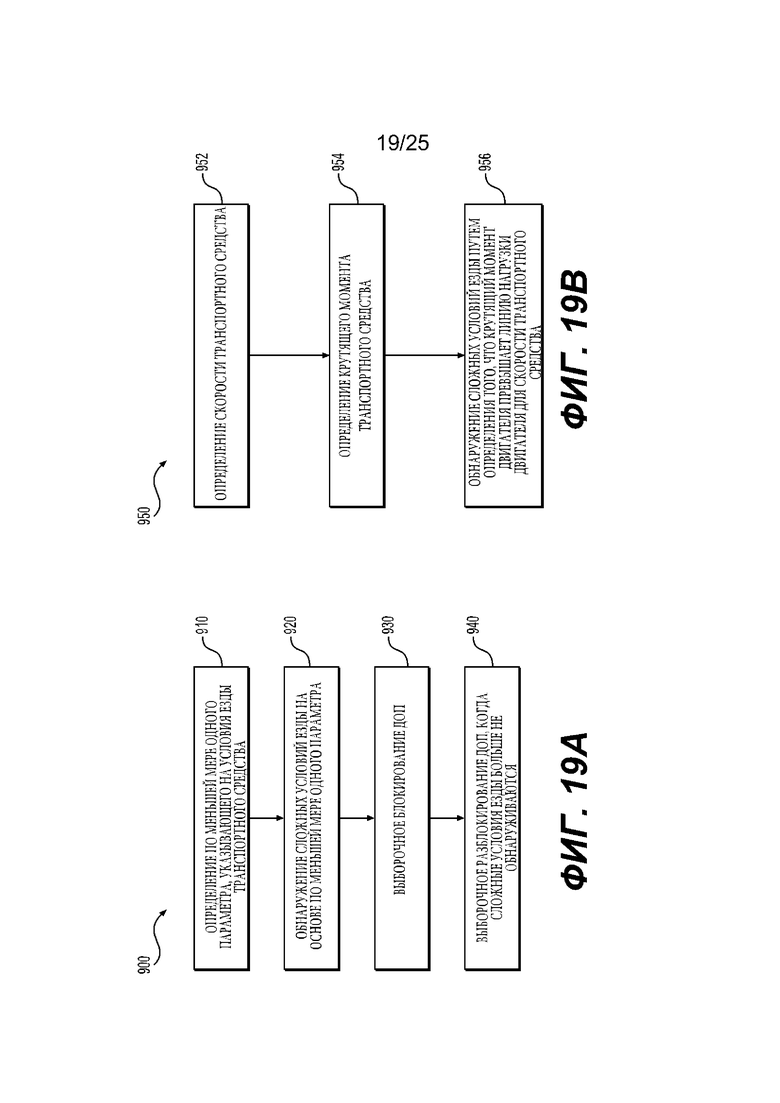
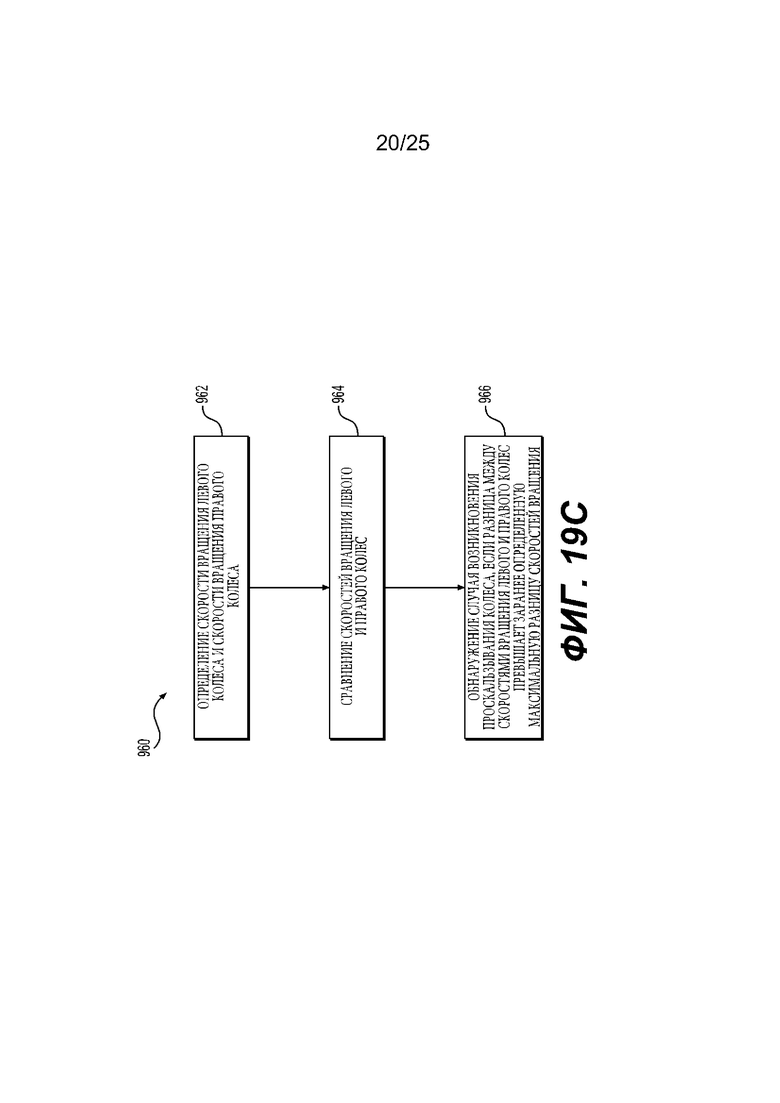
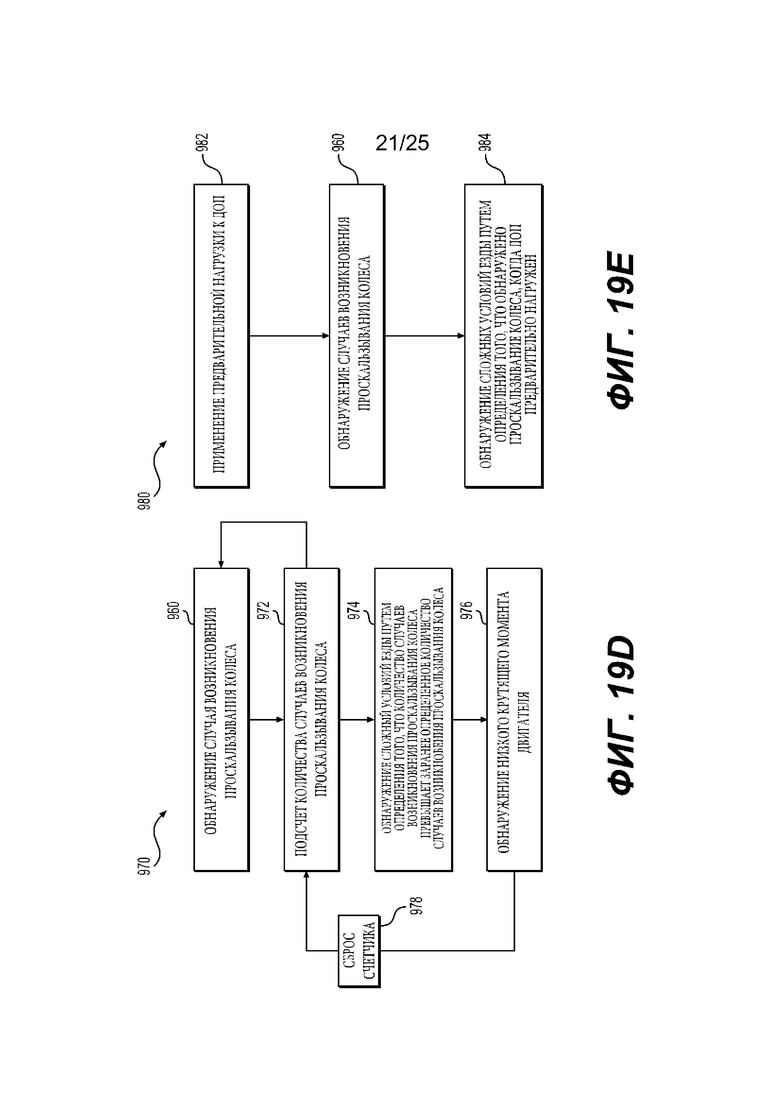
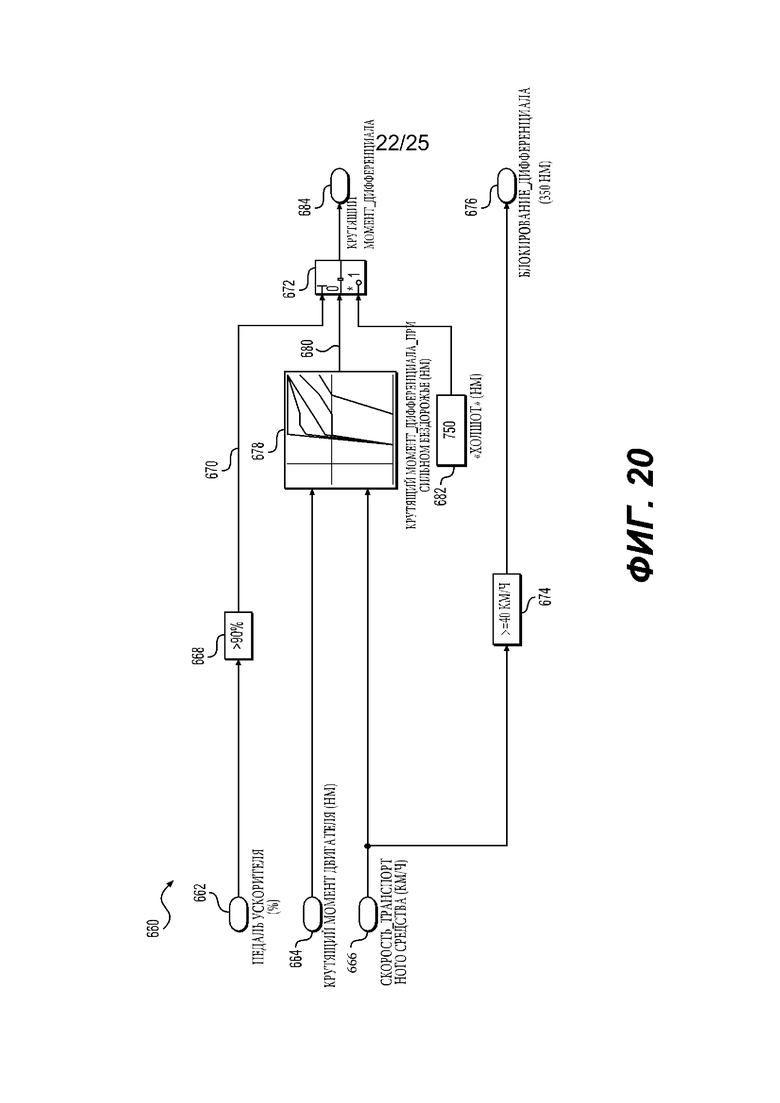
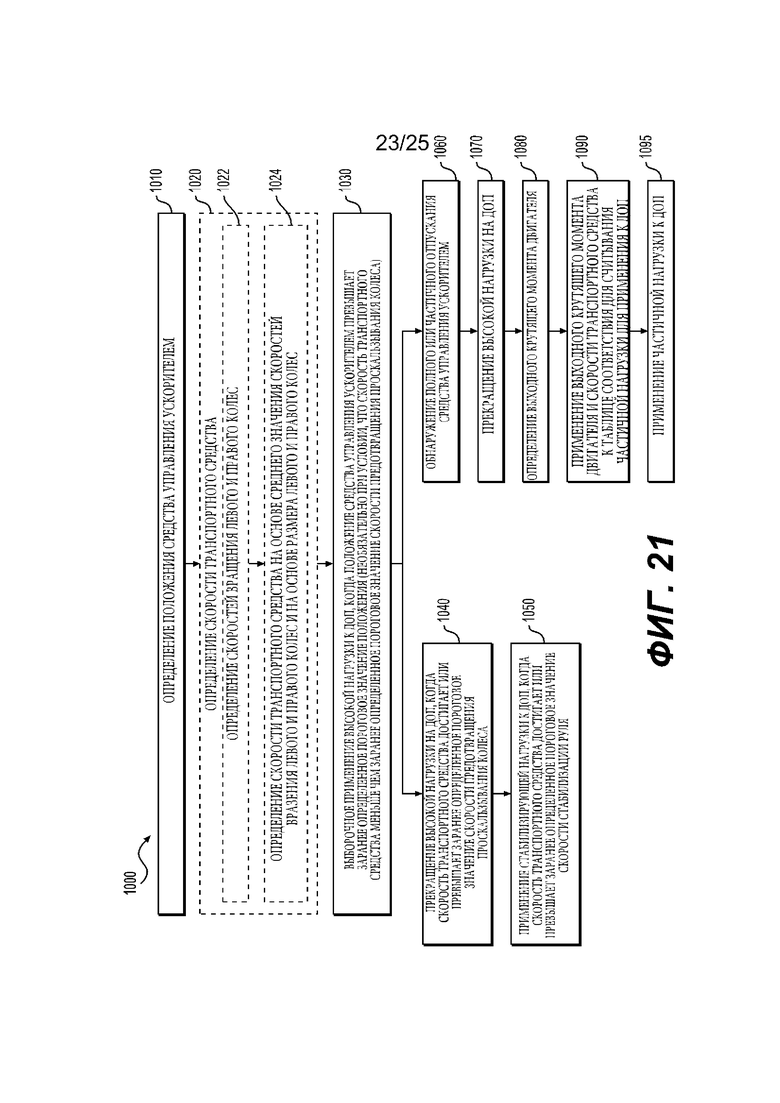
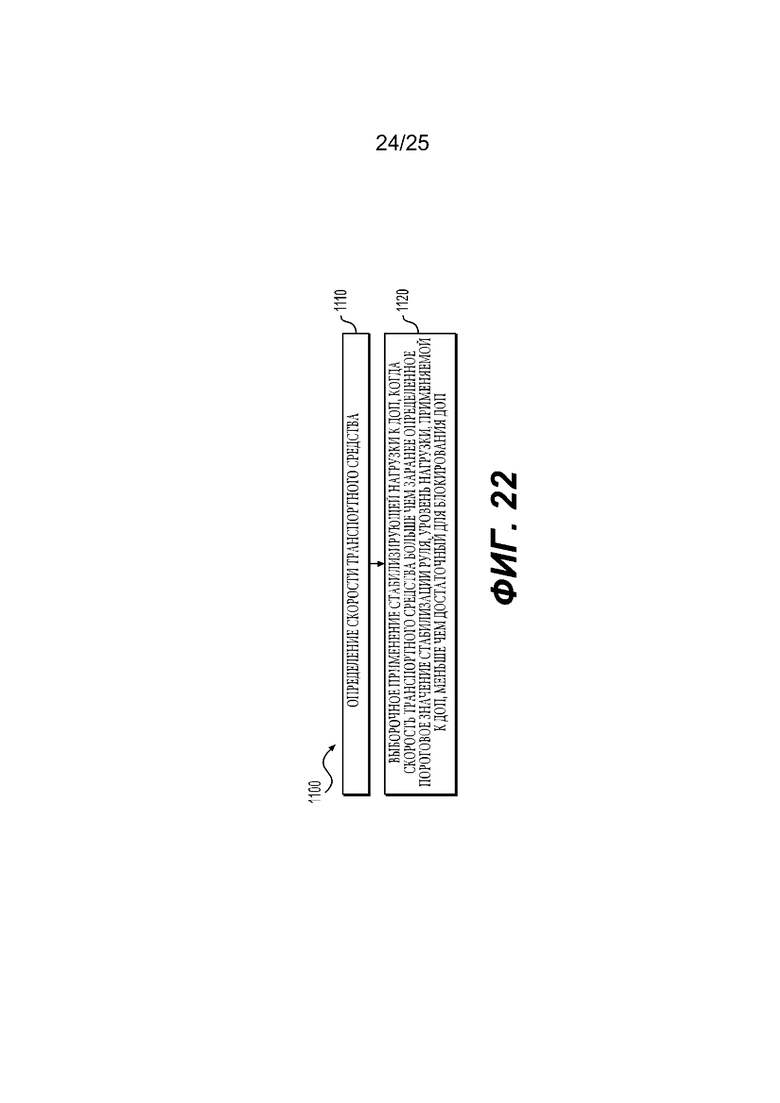
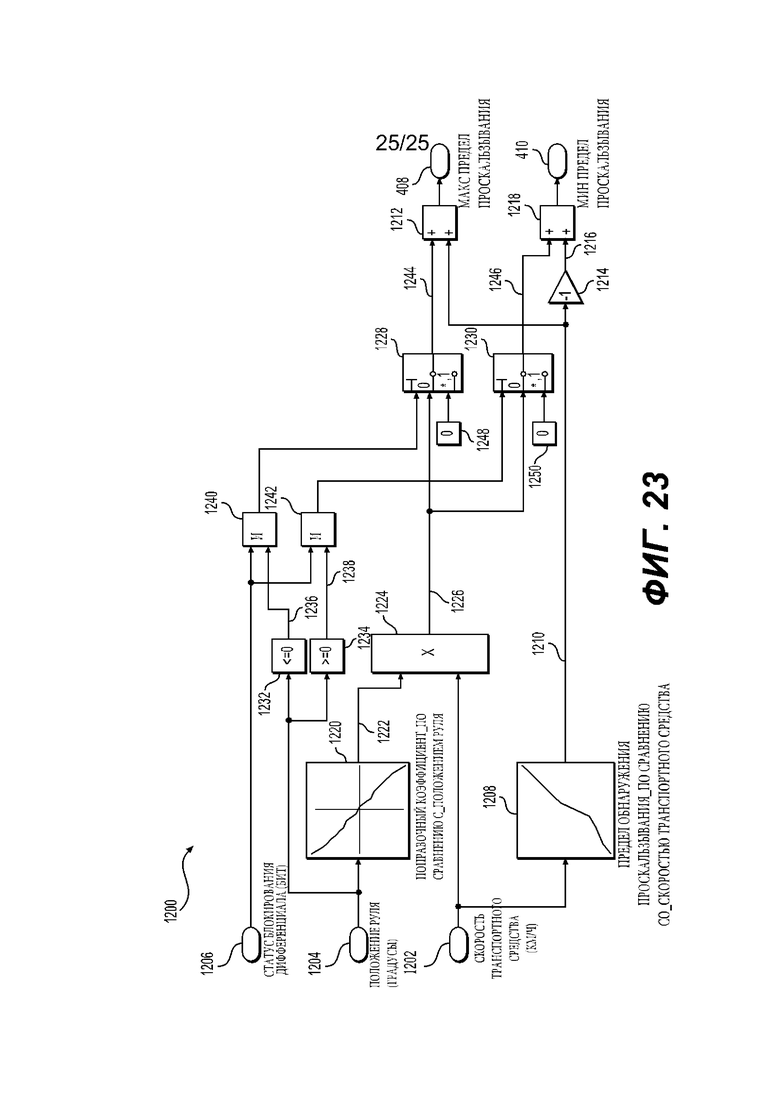
Изобретение относится к дифференциалам транспортных средств. В способе управления дифференциалом ограниченного проскальзывания транспортного средства определяют текущий выходной крутящий момент двигателя; определяют положение средства управления ускорителем; определяют прогнозированный крутящий момент двигателя, на основе текущего выходного крутящего момента двигателя и положения средства управления ускорителем; определяют скорость транспортного средства. Также определяют значения предварительной нагрузки для применения к дифференциалу. Значение предварительной нагрузки основано на прогнозированном крутящем моменте двигателя и на скорости транспортного средства. Применяют предварительную нагрузку к дифференциалу, когда значение предварительной нагрузки больше нуля. Исключается нежелательная блокировка дифференциала. 3 н. и 17 з.п. ф-лы, 23 ил., 6 табл.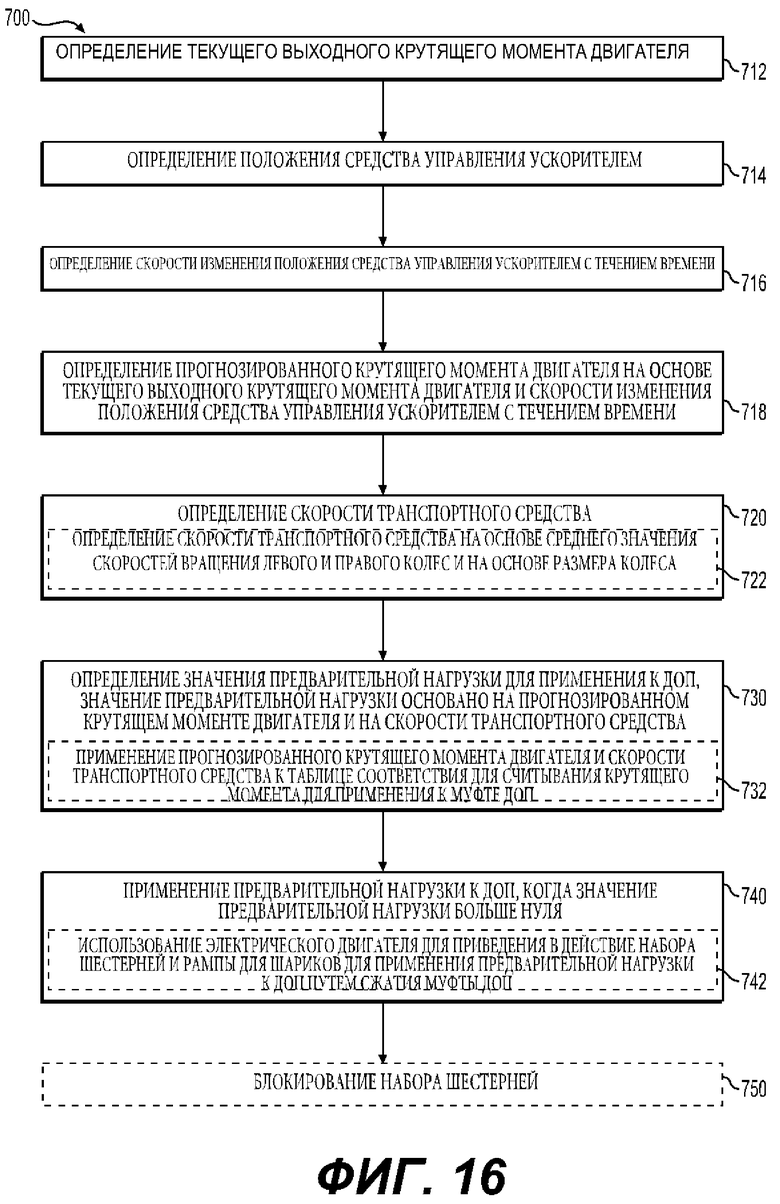
1. Способ управления дифференциалом ограниченного проскальзывания (ДОП) транспортного средства, транспортное средство имеет двигатель, дифференциал ограниченного проскальзывания, а также левое и правое ведомые колеса, функционально соединенные с дифференциалом ограниченного проскальзывания, способ включает:
определение текущего выходного крутящего момента двигателя;
определение положения средства управления ускорителем;
определение прогнозированного крутящего момента двигателя на основе текущего выходного крутящего момента двигателя и положения средства управления ускорителем;
определение скорости транспортного средства;
определение значения предварительной нагрузки для применения к дифференциалу ограниченного проскальзывания, значение предварительной нагрузки основано на прогнозированном крутящем моменте двигателя и на скорости транспортного средства; и
применение предварительной нагрузки к дифференциалу ограниченного проскальзывания, когда значение предварительной нагрузки больше нуля.
2. Способ по п. 1, дополнительно включающий:
определение скоростей вращения левого и правого колес; и
определение среднего значения скоростей вращения левого и правого колес.
3. Способ по п. 1, отличающийся тем, что применение предварительной нагрузки к ДОП включает сжатие муфты ДОП для уменьшения разницы скорости вращения левого и правого колес.
4. Способ по п. 3, отличающийся тем, что сжатие муфты ДОП включает:
использование электрического двигателя для приведения в действие набора шестерней и рампы для шариков для применения крутящего момента к муфте; и
использование соленоида для блокирования набора шестерней.
5. Способ по п. 3, дополнительно включающий применение прогнозированного крутящего момента двигателя и скорости транспортного средства к таблице соответствия нагрузки для считывания значения крутящего момента, подлежащего применению для сжатия муфты.
6. Способ по п. 5, дополнительно включающий:
определение положения переключателя коробки передач; и
выбор таблицы соответствия нагрузки из множества таблиц соответствия нагрузки в соответствии с положением переключателя коробки передач.
7. Способ по п. 1, дополнительно включающий:
определение скорости изменения положения средства управления ускорителем с течением времени;
причем прогнозированный крутящий момент двигателя дополнительно основан на скорости изменения положения средства управления ускорителем с течением времени.
8. Способ по п. 7, отличающийся тем, что определение прогнозированного крутящего момента двигателя включает добавление регулировки крутящего момента, пропорциональной скорости изменения положения средства управления ускорителем с течением времени, и текущего выходного крутящего момента двигателя.
9. Узел дифференциала для применения в транспортном средстве, имеющем двигатель, а также левое и правое ведомые колеса, узел дифференциала содержит:
дифференциал ограниченного проскальзывания (ДОП), выполненный с возможностью функционального соединения с приводным валом и с левым и правым ведомыми колесами, дифференциал ограниченного проскальзывания адаптирован для передачи крутящего момента от приводного вала на левое и правое ведомые колеса;
датчик для мониторинга крутящего момента двигателя;
датчик средства управления ускорителем;
датчик скорости; и
блок управления, функционально соединенный с дифференциалом ограниченного проскальзывания, с датчиком для мониторинга крутящего момента двигателя, с датчиком средства управления ускорителем и с датчиком скорости, блок управления адаптирован для:
определения прогнозированного крутящего момента двигателя на основе измерения крутящего момента двигателя от датчика для мониторинга крутящего момента двигателя и положения средства управления ускорителем, выданного датчиком средства управления ускорителем,
определения скорости транспортного средства на основе измерения от датчика скорости,
определения значения предварительной нагрузки для применения к дифференциалу ограниченного проскальзывания, значение предварительной нагрузки основано на прогнозированном крутящем моменте двигателя и скорости транспортного средства, и
управления применением предварительной нагрузки к дифференциалу ограниченного проскальзывания, когда значение предварительной нагрузки больше нуля.
10. Узел дифференциала по п. 9, дополнительно содержащий электрический двигатель, причем применение предварительной нагрузки к ДОП включает управление предварительной нагрузкой, применяемой электрическим двигателем к ДОП.
11. Узел дифференциала по п. 10, отличающийся тем, что ДОП дополнительно содержит:
сжимаемую муфту, причем применение предварительной нагрузки к ДОП включает сжатие муфты; и
набор шестерней и рампу для шариков, зубчатая передача адаптирована для применения предварительной нагрузки от электрического двигателя на рампу для шариков для сжатия муфты.
12. Узел дифференциала по п. 11, дополнительно содержащий соленоид, имеющий зубец, адаптированный для зацепления с набором шестерней, когда соленоид запитан, причем блок управления дополнительно адаптирован для управления соленоидом для блокирования ДОП.
13. Узел дифференциала по п. 9, отличающийся тем, что блок управления содержит:
входной порт, адаптированный для приема измерений от датчика для мониторинга крутящего момента двигателя, от датчика средства управления ускорителем и от датчика скорости;
выходной порт, адаптированный для передачи команд управления на ДОП; и
процессор, функционально соединенный со входным портом и с выходным портом, процессор адаптирован для:
определения прогнозированного крутящего момента двигателя,
определения скорости транспортного средства,
определения значения предварительной нагрузки для применения к ДОП, и
побуждения выходного порта к передаче команды управления для применения предварительной нагрузки к ДОП, когда значение предварительной нагрузки больше нуля.
14. Узел дифференциала по п. 13, отличающийся тем, что:
блок управления дополнительно содержит память, хранящую конфигурационную информацию для управления ДОП; и
процессор функционально соединен с памятью.
15. Узел дифференциала по п. 14, отличающийся тем, что:
конфигурационная информация содержит таблицу соответствия нагрузки, содержащую множество значений крутящего момента для применения к сжимаемой муфте ДОП в зависимости от множества значений прогнозированного крутящего момента двигателя и в зависимости от множества значений скорости транспортного средства; и
процессор дополнительно адаптирован для применения прогнозированного крутящего момента двигателя и скорости транспортного средства к таблице соответствия нагрузки для определения значения входного крутящего момента для ДОП.
16. Узел дифференциала по п. 13, отличающийся тем, что процессор дополнительно адаптирован для определения прогнозированного крутящего момента двигателя путем:
применения положения средства управления ускорителем и ограниченной по времени скорости изменения положения средства управления ускорителем с течением времени к таблице соответствия крутящего момента для получения оценки крутящего момента двигателя;
корректировки оценки крутящего момента двигателя на основе поправочного коэффициента средства управления ускорителем для определения проецированного крутящего момента;
определения поправки крутящего момента на основе измерения крутящего момента двигателя и поправочного коэффициента крутящего момента; и
добавления проецированного крутящего момента и поправки крутящего момента.
17. Узел дифференциала по п. 13, отличающийся тем, что процессор дополнительно адаптирован для:
приема, посредством входного порта, измерения крутящего момента двигателя;
приема, посредством входного порта, последовательных сигналов, предоставляющих положения средства управления ускорителем;
определения скорости изменения положения средства управления ускорителем с течением времени; и
вычисления поправочного коэффициента крутящего момента на основе скорости изменения положения средства управления ускорителем с течением времени;
причем прогнозированный крутящий момент двигателя определяется на основе поправочного коэффициента крутящего момента и измерения крутящего момента двигателя; и
при этом процессор дополнительно адаптирован для определения прогнозированного крутящего момента двигателя путем добавления регулировки крутящего момента, пропорциональной скорости изменения положения средства управления ускорителем с течением времени, и измерения крутящего момента двигателя.
18. Узел дифференциала по п. 17, отличающийся тем, что процессор дополнительно адаптирован для определения прогнозированного крутящего момента двигателя путем:
применения положения средства управления ускорителем и ограниченной по времени скорости изменения положения средства управления ускорителем с течением времени к таблице соответствия крутящего момента для получения оценки крутящего момента двигателя;
корректировки оценки крутящего момента двигателя на основе поправочного коэффициента средства управления ускорителем для определения проецированного крутящего момента;
определения поправки крутящего момента на основе измерения крутящего момента двигателя и поправочного коэффициента крутящего момента; и
добавления проецированного крутящего момента и поправки крутящего момента.
19. Транспортное средство, содержащее:
раму;
узел передней подвески, соединенный с рамой;
узел задней подвески, соединенный с рамой;
левое ведомое колесо и правое ведомое колесо, соединенные с одним из узлов передней и задней подвески;
по меньшей мере одно другое колесо соединено с другим из узлов передней и задней подвески;
двигатель, соединенный с рамой;
коробку передач, функционально соединенную с двигателем для приема крутящего момента от двигателя;
приводной вал, функционально соединенный с коробкой передач для передачи крутящего момента от коробки передач на левое и правое ведомые колеса; и
узел дифференциала по п. 9, дифференциал ограниченного проскальзывания (ДОП) функционально соединен с приводным валом и функционально соединен с левым и правым ведомыми колесами.
20. Транспортное средство по п. 19, дополнительно содержащее:
ведущий мост в блоке с коробкой передач для передачи крутящего момента от коробки передач на по меньшей мере одно другое колесо; и
устройство выбора, адаптированное для выборочного функционального соединения ДОП с приводным валом.
| US 4679463 A, 14.07.1987 | |||
| US 2011295474 A1, 01.12.2011 | |||
| US 4741407 A, 03.05.1988 | |||
| US 5020391 A, 04.06.1991 | |||
| US 4776234 A, 11.10.1988. |

