Область техники, к которой относится изобретение
Изобретение относится к устройству управления полетом летательного аппарата.
Уровень техники
Устройства управления полетом для летательных аппаратов обычно содержат рычаг управления, установленный с возможностью поворота на раме устройства управления вокруг по меньшей мере двух перпендикулярных друг к другу осей вращения, чтобы иметь возможность управлять движениями крена и тангажа летательного аппарата. Для этого рычаг управления механически или электрически связан с одним или несколькими органами управления летательным аппаратом, такими как рулевые поверхности.
Для обеспечения помощи пилоту в управлении при крене или тангаже летательного аппарата, как известно, применяют устройства управления полетом, которые содержат приводы управления, связанные с рычагом таким образом, чтобы при каждом движении поворота рычага относительно рамы один из приводов позволял имитировать возвратное усилие для пилота, управляющего рычагом. Таким образом, пилот может легко и без усилия манипулировать рычагом по сравнению с устройствами, в которых управление происходит при помощи прямой механической связи между рычагом и органами управления.
Однако при такой архитектуре усилие, ощущаемое на уровне рычага управления при повороте вокруг поперечной оси самолета, как правило, различается в зависимости от того, что рычаг управления дополнительно наклоняется вокруг продольной оси самолета вправо или влево.
Чтобы преодолеть этот недостаток соединения было предложено применять серворегуляторы приводов управления для обеспечения симметрии усилия, ощущаемого на рычаге управления при повороте вокруг поперечной оси самолета, в то время как рычаг управления дополнительно наклоняется вокруг продольной оси самолета.
Однако это вынуждает разрабатывать специальные серворегуляторы, ограничивающие эксплуатацию применяемых приводов. Кроме того, необходимо увеличивать параметры приводов для обеспечения этой симметрии ощущаемого усилия.
Раскрытие сущности изобретения
Изобретение призвано предложить устройство управления полетом, позволяющее по меньшей мере частично преодолеть вышеупомянутые недостатки.
Для решения этой задачи предложено устройство управления полетом летательного аппарата, содержащее рычаг управления, связанный с рамой, на которой установлены:
- первый блок, соединенный с рамой через первую поворотную связь вокруг первой оси,
- второй блок, соединенный с первым блоком через вторую поворотную связь вокруг второй оси, которая по существу является перпендикулярной к первой оси и пересекающейся с ней, при этом рычаг управления соединен со вторым блоком через третью поворотную связь вокруг третьей оси, которая по существу является перпендикулярной к первой оси и ко второй оси и пересекающейся с ними,
- первый трансмиссионный вал, установленный с возможностью поворота относительно рамы вокруг четвертой оси и соединенный по меньшей мере с первым приводным органом управления, вынесенным относительно рамы,
- первый механизм соединения рычага управления с первым трансмиссионным валом таким образом, чтобы поворот рычага управления вокруг первой оси вызывал вращение первого вала вокруг четвертой оси, при этом первый вал и первый механизм соединения соединены друг с другом через пятую поворотную связь вокруг пятой оси, наклоненной относительно первой оси и четвертой оси,
- второй трансмиссионный вал, установленный с возможностью поворота относительно рамы вокруг шестой оси и соединенный по меньшей мере с вторым приводным органом управления, вынесенным относительно рамы,
- второй механизм соединения рычага управления с вторым трансмиссионным валом таким образом, чтобы поворот рычага управления вокруг второй оси вызывал вращение второго вала вокруг шестой оси, при этом второй вал и второй механизм соединения соединены друг с другом через седьмую поворотную связь вокруг седьмой оси, наклоненной относительно второй оси и шестой оси,
- площадку, соединенную с рамой через восьмую поворотную связь вокруг восьмой оси, при этой второй механизм соединения установлен с возможностью поворота на площадке при помощи девятой поворотной связи вокруг первой оси и установлен с возможностью поворота на рычаге управления при помощи десятой поворотной связи вокруг первой оси.
При таком специальном выполнении устройства управления полетом устройство управления полетом оказывается полностью отделенным между управлением вокруг второй оси и шестой оси и управлением вокруг первой оси и четвертой оси. Кроме того, управление вокруг первой оси и управление вокруг второй оси оказываются симметричными.
При такой архитектуре усилие, ощущаемое на уровне рычага управления при повороте вокруг второй оси, естественным образом является по существу идентичным, когда рычаг управления дополнительно наклоняется относительно продольной оси самолета вправо или влево.
Это позволяет отказаться от установки специального серворегулятора, обеспечивающего симметрию возвратных усилий, ощущаемых на рычаге управления.
Это облегчает также выполнение в рамках изобретения пассивной (факультативной) избыточной вспомогательной механической системы для создания возвратного усилия, ощущаемого на рычаге управления.
В рамках настоящей заявки выражение «ось А, наклоненная относительно оси В» означает, что ось А не является параллельной или перпендикулярной относительно оси В.
В варианте шестая ось является по существу нормальной к плоскости, образованной первой осью и второй осью, когда рычаг управления находится в нейтральном положении.
В варианте четвертая ось является по существу нормальной к плоскости, содержащей первую ось и вторую ось, когда рычаг управления находится в нейтральном положении.
В варианте первая ось, вторая ось, третья ось, шестая ось, седьмая ось и восьмая ось по существу пресекаются в первой точке, и первая ось, четвертая ось и пятая ось по существу пересекаются во второй точке.
В варианте четвертая ось и шестая ось являются по существу параллельными.
В варианте первый механизм выполнен с возможностью соединения первого вала с первым блоком через карданный шарнир.
В варианте второй механизм выполнен с возможностью соединения второго вала с рычагом управления через карданный шарнир.
В варианте второй блок окружает снаружи первый блок.
В варианте оба блока окружают снаружи площадку.
В варианте устройство содержит по меньшей мере один упор для ограничения движения рычага управления вокруг первой оси или вокруг второй оси, при этом упор выполнен в виде вращающегося ролика.
Краткое описание чертежей
Изобретение будет более понятно из нижеследующего описания не ограничивающего варианта осуществления изобретения со ссылками на прилагаемые фигуры, на которых:
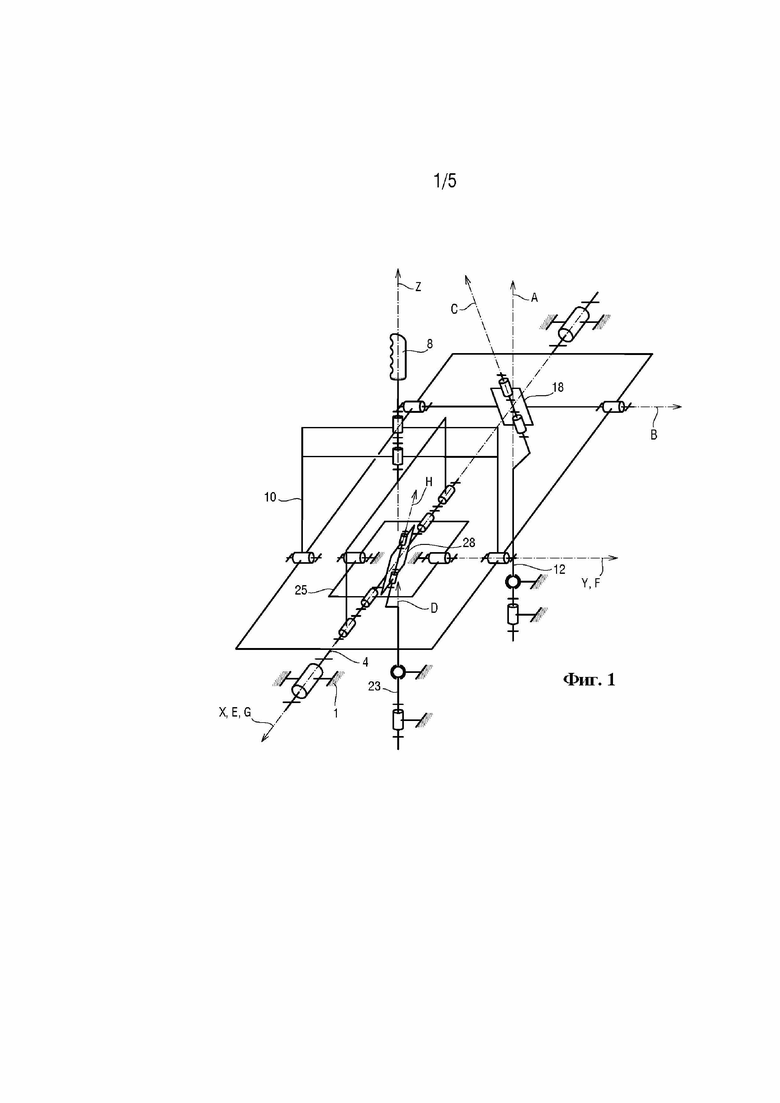
на фиг. 1 представлена схема устройства управления полетом согласно варианту осуществления изобретения;
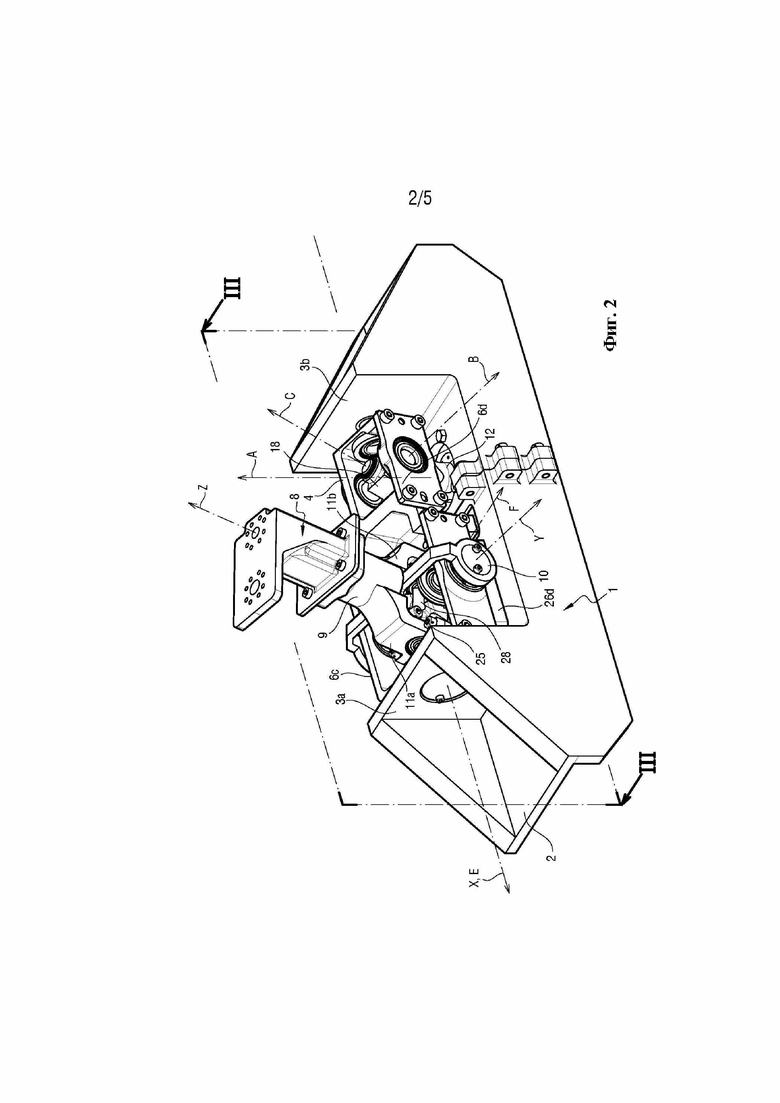
на фиг. 2 показано устройство, схематично изображенное на фиг. 1, вид в перспективе;
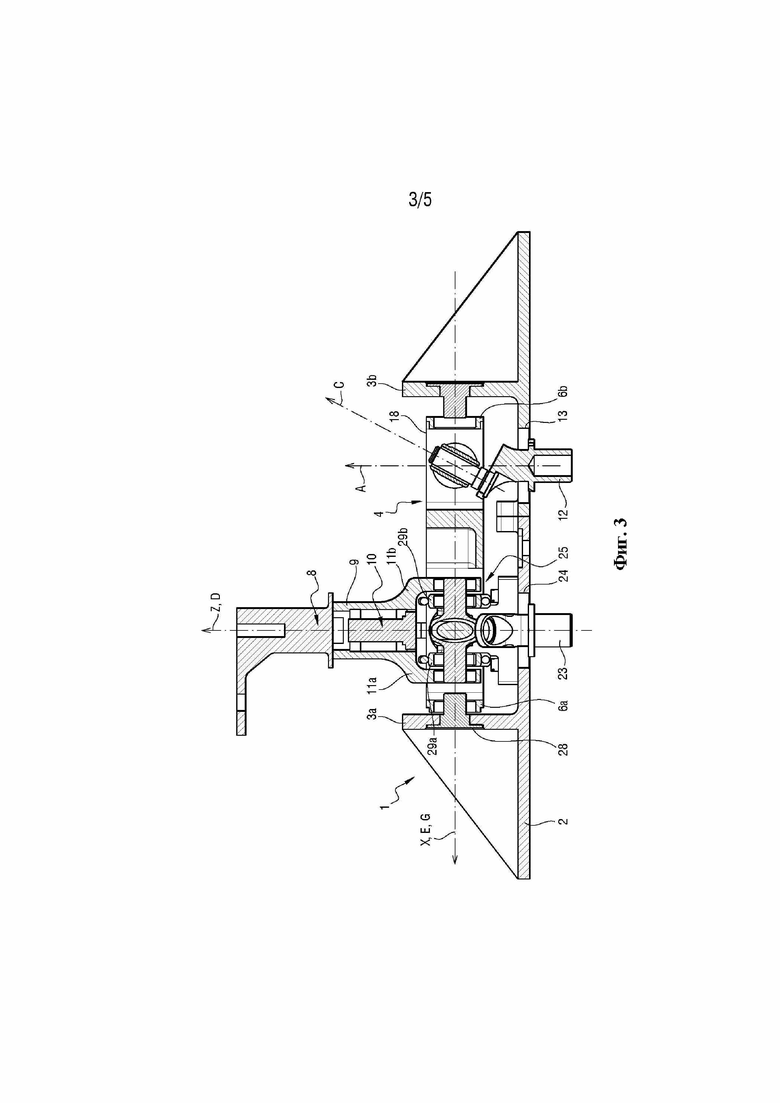
на фиг. 3 показано устройство, схематично изображенное на фиг. 1, вид в продольном разрезе;
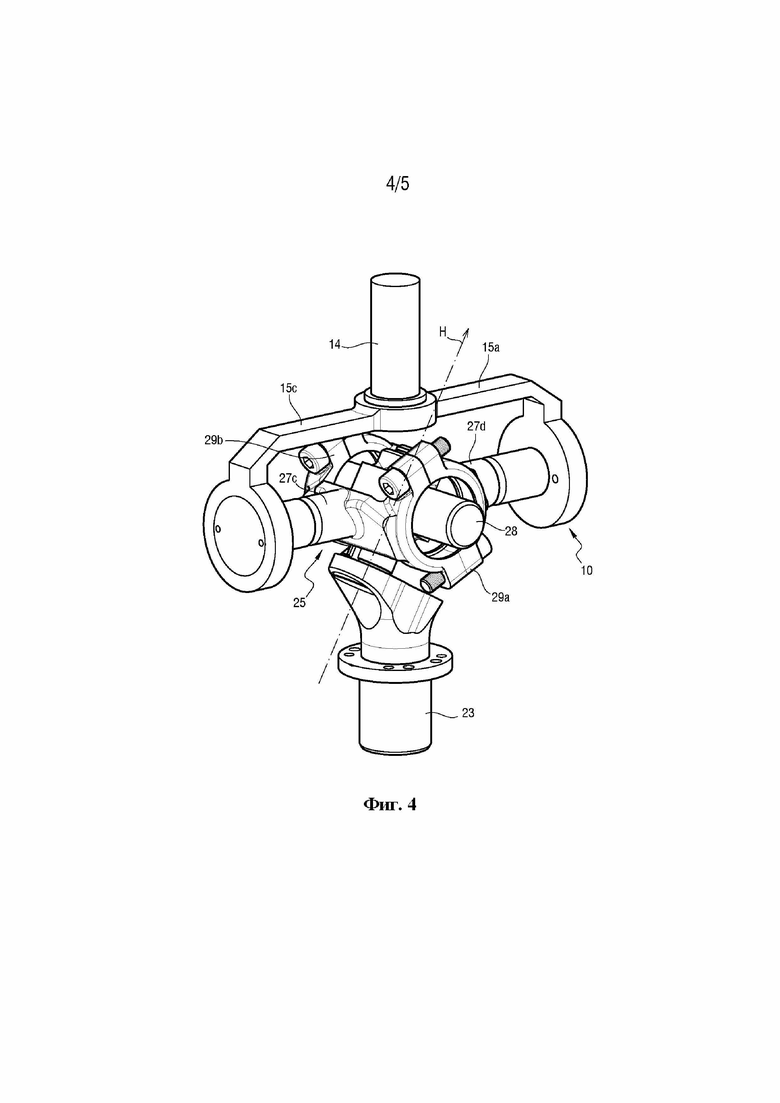
на фиг. 4 показана часть устройства, схематично изображенного на фиг. 1, при этом рычаг управления и первый блок устройства не показаны;
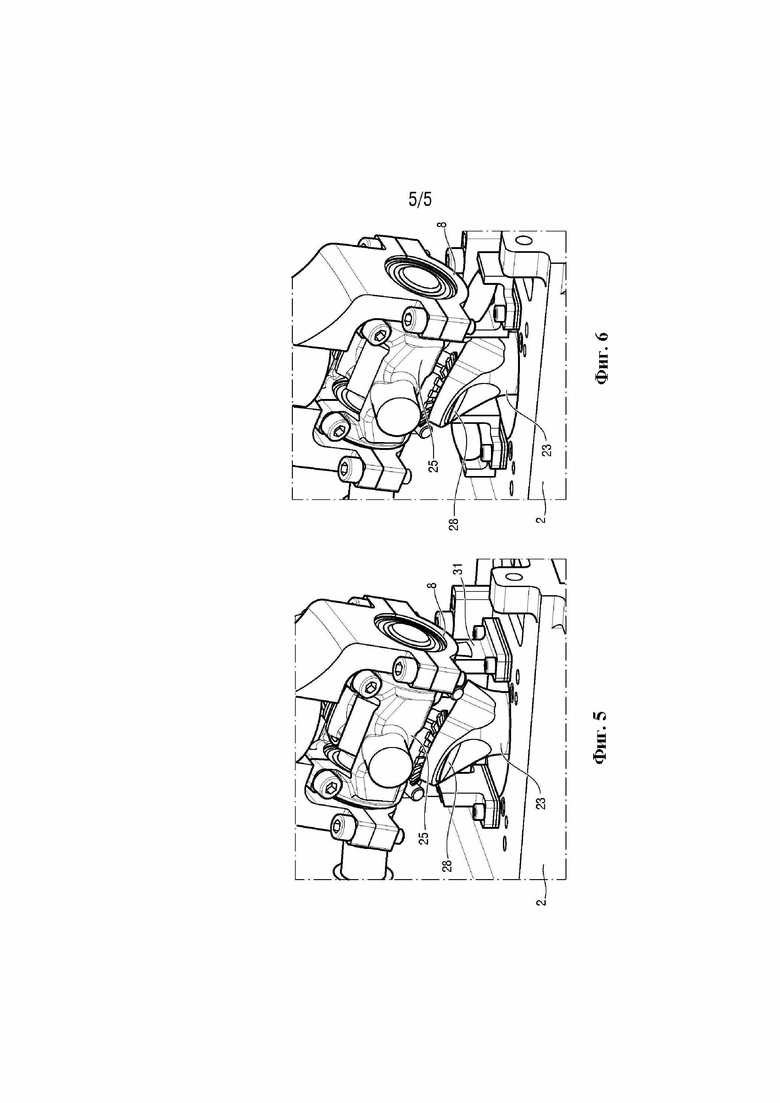
на фиг. 5 показана часть устройства, схематично изображенного на фиг. 1, увеличенный вид в перспективе;
на фиг. 6 представлен вариант упора, показанного на фиг. 5.
Осуществление изобретения
Как показано на фиг. 1-4, устройство управления полетом согласно первому варианту осуществления изобретения содержит раму 1. В частности, рама 1 проходит в продольном направлении и содержит пол 2 и по меньшей мере две боковые стенки 3а, 3b, расположенные противоположно друг к другу и проходящие вертикально по отношению к полу 2.
Кроме того, устройство содержит первый блок 4, который в данном случае имеет общую форму удлиненной рамки. Первый блок 4 напрямую соединен с рамой через первую поворотную связь с первой осью вращения Х. Первая ось Х соответствует продольной оси летательного аппарата.
Для этого первый блок 4 установлен на раме 1 при помощи двух коаксиальных подшипников качения (в данном случае не показаны), соответственно установленных на противоположных боковых стенках 3а, 3b рамы 1. Таким образом, первый блок 4 содержит две боковые стенки 6а, 6b, параллельные боковым стенкам 3а, 3b рамы 1, и две продольные стенки 6с, 6d, расположенные между боковыми стенками 6а, 6b первого блока 4.
Устройство содержит также рычаг 8 управления, который связан с рамой 1 и содержит в данном случае ручку, образующую свободный конец рычага управления. Рычаг 8 управления соединен с первым блоком 4 через второй блок 10, форма которого более наглядно показана на фиг. 4.
Второй блок 10 напрямую соединен с первым блоком 4 при помощи второй поворотной связи со второй осью вращения Y, при этом вторая ось Y является перпендикулярной к первой оси Х и пересекающей ее. Вторая ось Y соответствует поперечной оси летательного аппарата.
Для этого второй блок 10 рычага 8 управления установлен на первом блоке 4 при помощи двух коаксиальных подшипников качения (в данном случае не показаны), соответственно установленных на противоположных продольных стенках 6с, 6d первого блока 4. Следует отметить, что вторая ось Y связана с первым блоком 4, то есть поворот первого блока 4 вокруг первой оси Х приводит к повороту второй оси Y вокруг первой оси Х.
В данном случае второй блок 10 выполнен таким образом, чтобы его можно было установить с возможностью поворота на первом блоке 4 снаружи первого блока 4. Таким образом, второй блок 10 установлен на первом блоке 4 на уровне наружных сторон противоположных продольных стенок 6с, 6d первого блока 4. Как правило, второй блок 10 содержит основание 14 соединения с рычагом 8 управления, от которого отходят две ветви 15с, 15d, каждая из которых установлена на одной из соответствующих продольных стенок 6с, 6d первого блока 4. Таким образом, второй блок 10 имеет общую форму скобы.
Кроме того, рычаг 8 управления соединен со вторым блоком 10 при помощи третьей поворотной связи с третьей осью вращения Z, при этом третья ось Z является перпендикулярной к первой оси Х и ко второй оси Y и пересекающейся с ними. Для этого рычаг 8 управления установлен на основании 14 соединения второго блока 10, при этом само основание 14 соединения расположено вдоль третьей оси Z и установлено при помощи двух коаксиальных подшипников качения (в данном случае не показаны).
Следует отметить, что третья ось Z связана c первым блоком 4, то есть поворот первого блока 4 вокруг первой оси Х (или второй оси Y) приводит к повороту третьей оси Z вокруг первой оси Х (или второй оси Y).
Рычаг 8 управления выполнен в данном случае таким образом, что имеет главный участок 9, который проходит вдоль третьей оси Z и установлен с возможностью поворота на соединительном основании 14. Дистальный конец главного участка 9 продолжен вилкой, содержащей две противоположные боковины 11а, 11b. Боковины 11a, 11b вилки в данном случае проходят параллельно боковым стенкам 3а, 3b рамы 1, когда рычаг 8 управления находится в нейтральном положении.
Следует отметить, что две ветви 15с, 15d второго блока 10 проходят под главным участком 9 между двумя боковинами 11а, 11b вилки, достигая первого блока 4.
Устройство содержит первый трансмиссионный вал 12, напрямую соединенный с рамой 1 при помощи четвертой поворотной связи с четвертой осью вращения А. Для этого первый трансмиссионный вал 12 частично проходит внутри отверстия 13 пола 2 рамы 1 и установлен с возможностью поворота в отверстии 13 при помощи двух коаксиальных подшипников качения (в данном случае не показаны).
В данном случае первый трансмиссионный вал 12 расположен таким образом, что четвертая ось А пересекается с первой осью Х. Кроме того, первый трансмиссионный вал 12 расположен таким образом, что четвертая ось А является нормальной к плоскости, содержащей первую ось Х и вторую ось Y, когда рычаг 8 управления находится в нейтральном положении (то есть, когда плоскость, содержащая первую ось Х и вторую ось Y, является параллельной полу 2). В этом нейтральном положении рычага 8 управления четвертая ось А является параллельной относительно третьей оси Z.
Первый вал 12 содержит первый конец. Первый конец содержит прямолинейный концевой участок и изогнутый участок сопряжения прямолинейного концевого участка со вторым концом второго вала. Таким образом, прямолинейный концевой участок первого конца расположен под углом относительно четвертой оси А и второго конца второго трансмиссионного вала.
Второй конец первого вала 12 связан с первой группой приводов (в данном случае не показаны), вынесенных относительно рамы.
Кроме того, устройство содержит первый механизм соединения рычага 8 управления с первым трансмиссионным валом 12 таким образом, что поворот рычага 8 управления вокруг первой оси Х приводит к вращению первого трансмиссионного вала 12 вокруг четвертой оси А.
Предпочтительно первый соединительный механизм соединяет первый трансмиссионный вал 12 с рычагом 8 управления через карданный шарнир.
Так, первый соединительный механизм имеет первую крестовину 18, содержащую две ветви, расположенные перпендикулярно друг к другу.
В частности, первый соединительный механизм напрямую соединен с первым блоком 4 при помощи пятой поворотной связи с пятой осью вращения В. Для этого первый конец первой ветви первой крестовины 18 установлен на одной из продольных стенок 6d первого блока 4 при помощи первого подшипника качения, неподвижно соединенного с указанной продольной стенкой 6d, и второй конец первой ветви первой крестовины 18 установлен на другой продольной стенке 6с первого блока 4 при помощи второго подшипника качения, неподвижно соединенного с указанной продольной стенкой 6с, при этом первый подшипник качения и второй подшипник качения являются коаксиальными. Таким образом, первая ветвь проходит поперечно в первом блоке 4 между двумя продольными стенками 6с, 6d первого блока 4.
Первая крестовина 18 расположена таким образом, что пятая ось В пересекается с первой осью Х и с четвертой осью А и проходит параллельно второй оси Y, когда рычаг 8 управления находится в своем нейтральном положении.
В данном случае вторая ветвь первой крестовины 18 имеет центральное отверстие, проходящее по всей длине второй ветви. Первый трансмиссионный вал 12 напрямую связан с первой крестовиной 18 при помощи шестой поворотной связи с шестой осью вращения С. Для этого прямолинейный концевой участок первого трансмиссионного вала 12 проходит внутри второй ветви и установлен с возможностью поворота в центральном отверстии второй ветви при помощи двух коаксиальных подшипников качения.
Устройство выполнено таким образом, что шестая ось С является наклонной относительно первой оси Х, четвертой оси А и пятой оси В и пересекается с первой осью Х, с четвертой осью А и с пятой осью В. Первый трансмиссионный вал 12 выполнен таким образом, что прямолинейный концевой участок расположен на 25 градусов от второго конца первого трансмиссионного вала 12, при этом шестая ось С расположена в данном случае на 25 градусов от четвертой оси А.
С учетом особой изогнутой формы первого трансмиссионного вала 12 можно обеспечивать поворотную связь между первым валом 12 и первым соединительным механизмом, которая имеет ось, наклонную относительно первой оси Х и четвертой оси А.
Передача крутящего момента между рычагом 8 управления и первым трансмиссионным валом 12 происходит, таким образом, через первый блок 4 и через первую крестовину 18. Когда пилот перемещает рычаг 8 управления вокруг первой оси вращения Х, первый блок 4 тоже приводится во вращение относительно рамы 1 вокруг первой оси вращения Х, что, благодаря карданному шарниру, образованному первой крестовиной 18, приводит к вращению первого трансмиссионного вала 12 вокруг четвертой оси А.
Устройство содержит второй трансмиссионный вал 23, напрямую соединенный с рамой 1 при помощи седьмой поворотной связи с седьмой осью вращения D. Для этого второй трансмиссионный вал 23 частично расположен внутри отверстия 24 пола 2 рамы 1 и установлен с возможностью поворота в отверстии 24 при помощи двух коаксиальных подшипников качения (в данном случае не показаны).
В данном случае второй трансмиссионный вал 23 расположен таким образом, что седьмая ось D пересекается с первой осью Х и со второй осью Y. Кроме того, второй трансмиссионный вал 23 расположен таким образом, что седьмая ось D является нормальной к плоскости, содержащей первую ось Х и вторую ось Y, когда рычаг 8 управления находится в нейтральном положении (то есть, когда плоскость, содержащая первую ось Х и вторую ось Y, является параллельной относительно пола 2).
Таким образом, седьмая ось D является параллельной относительно четвертой оси А, при этом первый трансмиссионный вал 12 и второй трансмиссионный вал 23 расположены параллельно друг другу.
Второй вал 23 содержит первый конец. Первый конец имеет прямолинейный концевой участок и изогнутый участок сопряжения прямолинейного концевого участком с вторым концом второго вала 23. Таким образом, прямолинейный концевой участок расположен под углом к седьмой оси D и к второму концу.
Второй конец второго вала 23 связан со второй группой приводов (в данном случае не показаны), вынесенных относительно рамы.
Кроме того, устройство содержит второй механизм соединения рычага 8 управления со вторым трансмиссионным валом 23 таким образом, что поворот рычага 8 управления вокруг второй оси Y приводит к вращению второго трансмиссионного вала 23 вокруг седьмой оси D.
Предпочтительно второй соединительный механизм соединяет второй трансмиссионный вал 23 с рычагом 8 управления через карданный шарнир.
В данном случае второй соединительный механизм содержит вторую крестовину 28, имеющую две ветви, расположенные перпендикулярно друг к другу.
Второй соединительный механизм соединен напрямую с рычагом 8 управления при помощи восьмой поворотной связи с восьмой осью вращения Е, которая в данном случае совпадает с первой осью вращения Х. Для этого первый конец первой ветви второй крестовины 28 установлен на одной из боковин 11а вилки рычага 8 управления при помощи первого подшипника качения (в данном случае не показан), и второй конец первой ветви второй крестовины 28 установлен на другой боковине 11b вилки рычага 8 управления при помощи второго подшипника качения (в данном случае не показан), при этом первый подшипник качения и второй подшипник качения являются коаксиальными. Таким образом, первая ветвь первой крестовины 28 расположена в продольном направлении в раме 1 между боковинами вилки рычага 8 управления.
Кроме того, второй соединительный механизм соединен с рамой 1 через площадку 25 устройства. Площадка 25 напрямую соединена с рамой при помощи девятой поворотной связи с девятой осью вращения F. Девятая ось вращения F совпадает с второй осью вращения Y, когда рычаг 8 управления находится в нейтральном положении (то есть, когда плоскость, содержащая первую ось Х и вторую ось Y, является параллельной полу 2).
Для этого рама 1 содержит два боковых фланца 26с, 26d (в данном случае на фигурах показан только один из них), каждый из который проходит по нормали к полу 2 рамы 1. Соответственно, площадка 25 содержит два пальца 27с, 27d, при этом первый палец 27с установлен с возможностью поворота на одном из фланцев 26с при помощи подшипника качения (в данном случае не показан), и второй палец 27d установлен с возможностью поворота на другом из фланцев 26d при помощи подшипника качения (в данном случае не показан), при этом первый подшипник качения и второй подшипник качения являются коаксиальными.
Таким образом, площадка 25 расположена в поперечном направлении в раме 1 между двумя фланцами 26с, 26d.
Оба фланца 26с, 26d расположены между площадкой 25, с одной стороны, и первым блоком 4, с другой стороны.
С учетом расположения указанных фланцев площадка 25 окружена снаружи указанными фланцами 26с, 26d, а также, с одной стороны, первым блоком 4, который, в свою очередь окружает снаружи два фланца 26с, 26d, и, с другой стороны, вторым блоком 10, который, в свою очередь, окружает снаружи первый блок 4.
Кроме того, второй соединительный механизм напрямую соединен с площадкой 25 при помощи десятой поворотной связи с десятой осью вращения G, которая в данном случае совпадает с первой осью вращения Х. Для этого первый конец первой ветви второй крестовины 28 установлен на одной из боковых стенок 29а площадки 25 при помощи первого подшипника качения (в данном случае не показан), и второй конец первой ветви второй крестовины 28 установлен на другой из боковых стенок 29b площадки 25 (противоположной к боковой стенке 29а) при помощи второго подшипника качения (в данном случае не показан), при этом первый подшипник качения и второй подшипник качения являются коаксиальными. Таким образом, первая ветвь первой крестовины 28 проходит в продольном направлении в раме 1 между двумя боковыми стенками 29а, 29b площадки 25.
Учитывая расположение площадки 25, первая крестовина 28 окружена снаружи указанными боковыми стенками 29а, 29b, а также, с одной стороны, рычагом 8 управления, боковины 11а, 11b которого окружают снаружи, в свою очередь, обе боковые стенки 29а, 29b площадки 25, и, с другой стороны, первым блоком 4, который, в свою очередь, окружает снаружи рычаг 8 управления.
В данном случае вторая ветвь второй крестовины 28 имеет центральное отверстие, проходящее по всей длине второй ветви. Второй трансмиссионный вал 23 напрямую соединен с второй крестовиной 28 при помощи одиннадцатой поворотной связи с одиннадцатой осью вращения Н. Для этого изогнутый первый конец второго трансмиссионного вала 23 расположен внутри второй ветви и установлен с возможностью поворота в центральном отверстии второй ветви при помощи двух коаксиальных подшипников качения.
Устройство выполнено таким образом, что одиннадцатая ось Н имеет наклон относительно первой оси Х, второй оси Y и седьмой оси D и пересекается с первой осью Х, с второй осью Y и с седьмой осью D. В данном случае второй трансмиссионный вал 23 выполнен таким образом, что первый изогнутый конец расположен на 25 градусов от второго трансмиссионного вала 23, при этом одиннадцатая ось Н расположена на 25 градусов относительно седьмой оси D.
С учетом особой изогнутой формы второго трансмиссионного вала 23 можно обеспечивать поворотную связь между вторым валом 23 и вторым соединительным механизмом, которая имеет ось, наклоненную, в частности, относительно второй оси Y и седьмой оси D.
Таким образом, передача крутящего момента между рычагом 8 управления и вторым трансмиссионным валом 23 происходит только через вторую крестовину 28. Когда пилот перемещает рычаг 8 управления вокруг второй оси вращения Y, то за счет карданного шарнира, образованного второй крестовиной 28, это приводит к вращению второго трансмиссионного вала 23 вокруг седьмой оси D. Вместе с тем, это не приводит к вращению первого вала 12 вокруг четвертой оси А.
Благодаря конфигурации устройства и, в частности, за счет того, что второй трансмиссионный вал 23 установлен на площадке 25, которая, в свою очередь, соединена с рамой 1, то, когда пилот перемещает рычаг 8 управления вокруг первой оси вращения Х, это приводит только к вращению первого трансмиссионного вала 12 вокруг четвертой оси А. В частности, это не приводит к вращению второго трансмиссионного вала 23 вокруг седьмой оси D.
Таким образом, описанное устройство позволяет полностью отделить поворотное движение рычага 8 управления вокруг первой оси Х от поворотного движения второго трансмиссионного вала 23 вокруг седьмой оси D, а также поворотное движение рычага 8 управления вокруг второй оси Y от поворотного движения первого трансмиссионного вала 12 вокруг четвертой оси А.
Это позволяет также обеспечивать симметрию усилий, действующих на два трансмиссионных вала 12 и 23.
Следует отметить, что второй блок 10 связан с управлением при боковом крене, а площадка 25 - с управлением при продольном наклоне устройства. Таким образом, второй блок 10, направляющий движение при боковом крене, расположен снаружи площадки 25, направляющей движение при продольном наклоне.
Кроме того, устройство согласно первому варианту выполнения изобретения содержит только одиннадцать поворотных связей и восемь основных элементов (первый трансмиссионный вал 12, второй трансмиссионный вал 23, первая крестовина 18, вторая крестовина 28, первый блок 4, второй блок 10, площадка 25 и рычаг 8 управления), одновременно позволяя связать группу приводов с движениями вращения рычага 8 управления относительно рамы 1 вокруг первой оси Х и второй оси Y. Таким образом, устройство согласно данному варианту выполнения изобретения имеет упрощенную конструкцию.
Кроме того, различные элементы устройства связаны друг с другом при помощи подшипников качения. Это позволяет упростить устройство и сделать его более надежным. Действительно, это позволяет отказаться от зубчатых передач, подверженных заклиниванию, или от ременных передач, подверженных разрывам, или от линейных соединений, более подверженных износу.
Предпочтительно устройство выполнено таким образом, что первая ось Х, вторая ось Y, третья ось Z, седьмая ось D, восьмая ось Е, девятая ось F, десятая ось G и одиннадцатая ось Н пересекаются в первой точке, и первая ось Х, четвертая ось А, пятая ось В, шестая ось С пересекаются во второй точке.
Таким образом, различные поворотные оси устройства пересекаются только в двух точках, что позволяет получить исключительно компактное устройство.
Согласно частному отличительному признаку, чтобы ограничить поворотные движения рычага 8 управления вокруг первой оси Х, устройство содержит по меньшей мере один упор ограничения хода. Предпочтительно устройство содержит первую пару упоров ограничения хода рычага 8 управления вокруг первой оси Х.
Указанные упоры расположены в данном случае между первым блоком 4 и рамой 1 таким образом, что первый блок 4 опирается во время работы на упоры для ограничения движения рычага управления вокруг первой оси Х. Как правило, указанные упоры расположены на уровне соединения между первым блоком 4 и рамой 1. Например, указанные упоры выполнены соответственно на противоположных боковых стенках 3а, 3b рамы 1.
Кроме того, чтобы ограничить поворотные движения рычага 8 управления вокруг второй оси Y, устройство содержит по меньшей мере один упор ограничения хода рычага 8 управления вокруг второй оси Y. Предпочтительно устройство содержит вторую пару упоров ограничения хода рычага 8 управления вокруг второй оси Y.
Как показано на фиг. 5, указанные упоры 31 в данном случае расположены между рычагом 8 управления и рамой 1 таким образом, что во время работы рычаг 8 управления опирается на упоры 31, чтобы ограничить движение рычага 8 управления вокруг второй оси Y. Как правило, указанные упоры 31 расположены на уровне соединения между рычагом 8 управления и вторыми средствами трансмиссии. Например, каждый упор 31 закреплен на полу 2 рамы 1 таким образом, что располагается между двумя фланцами 26с, 26d указанной рамы 1. Поверхность каждого фланца 31, на которую должна опираться соответствующая поверхность рычага 8 управления, выполнена, например, закругленной, чтобы следовать форме соответствующей поверхности рычага 8 управления.
Разумеется, изобретение не ограничивается описанным вариантом выполнения, и его можно дополнить версиями, не выходя за рамки изобретения, определенные формулой изобретения.
Под нейтральным положением следует понимать положение рычага управления, в котором на рычаг управления не действует никакое усилие, при этом, если устройство опирается на плоскую поверхность, то плоскость, образованная первой осью и второй осью, является параллельной относительно указанной поверхности. Таким образом, в нейтральном положении рычаг управления обычно не имеет наклона ни относительно первой оси, ни относительно второй оси, ни относительно третьей оси.
Хотя в описанном варианте выполнения изогнутый участок одного из трансмиссионных валов расположен на 25 градусов от остальной части соответствующего трансмиссионного вала, изогнутый участок может быть выполнен с другом углом. В целом, решение по конкретной геометрии механизмов соединения и/или трансмиссионных валов принимают, чтобы адаптировать наклон шестой оси и одиннадцатой оси.
Хотя в данном случае рычаг управления соединен с вторым блоком при помощи поворотной связи, можно предусмотреть и другие конфигурации. Например, рычаг управления может быть соединен с вторым блоком при помощи прямолинейной линейной связи либо напрямую (при этом обе детали входят в контакт), либо через другие детали.
Разумеется, в рамках всей настоящей заявки, когда две детали установлены подвижными относительно друг друга, это можно выполнить напрямую (при этом обе детали входят в контакт), либо через другие детали.
На одной или другой из деталей, соединенных при помощи поворотной связи, могут быть установлены как подшипник качения или подшипники качения, так и любое другое средство, необходимое для реализации поворотной связи между двумя деталями.
Устройство может содержать избыточную вспомогательную механическую систему для создания возвратного усилия, ощущаемого на рычаге управления. Это облегчается за счет разделения и за счет симметрии усилий, действующих на трансмиссионные валы устройства.
Устройство может также содержать упоры, отличные от описанных. Например, можно изменить число и/или место расположения, и/или форму упора или упоров для ограничения перемещения рычага управления вокруг первой оси и/или второй оси. Так, указанный по меньшей мере один упор для ограничения движения рычага управления вокруг первой оси можно расположить таким образом, чтобы в контакт с упором входил рычаг управления или второй блок, а не первый блок. Например, указанный по меньшей мере один упор для ограничения движения рычага управления вокруг первой оси можно расположить на уровне фланцев рамы и/или площадки. Кроме того, указанный по меньшей мере один упор для ограничения движения рычага управления вокруг второй оси можно расположить таким образом, чтобы в контакт с упором входила площадка, а не рычаг управления. Например, указанный по меньшей мере один упор для ограничения движения рычага управления вокруг первой оси можно расположить на уровне фланцев рамы и/или площадки. Вместо плоской или закругленной поверхности, как показано на фиг. 6, каждый упор (связанный с первой осью или с второй осью) может иметь другую форму, например, форму вращающегося ролика. Это позволяет ограничить износ указанного упора.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛЕТОМ ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2643856C2 |
| УСТРОЙСТВО ПРИЛОЖЕНИЯ УСИЛИЯ ДЛЯ РУЧКИ УПРАВЛЕНИЯ В СИТУАЦИИ ОТСУТСТВИЯ ТОКА | 2020 |
|
RU2775909C1 |
| МУФТА РАВНЫХ УГЛОВЫХ СКОРОСТЕЙ И РЕГУЛИРУЮЩАЯ СИСТЕМА ДЛЯ НЕЕ | 2002 |
|
RU2292494C2 |
| ГУСЕНИЧНАЯ МАШИНА | 2000 |
|
RU2211166C2 |
| ИНВАЛИДНАЯ КОЛЯСКА С ЭЛЕКТРОМЕХАНИЧЕСКИМ ПРИВОДОМ | 1991 |
|
RU2085166C1 |
| КАЛИТКА | 2009 |
|
RU2403365C1 |
| Установка для микросварки проволочных проводников | 2021 |
|
RU2759103C1 |
| ПЛАТФОРМА ДЛЯ ИСПОЛЬЗОВАНИЯ В МАЛОРАЗМЕРНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТАХ | 2011 |
|
RU2589534C2 |
| ПРИВОДНАЯ СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ПЛАТФОРМОЙ И СЕДЛОМ РЕАБИЛИТАЦИОННОГО ТРЕНАЖЕРА ДЛЯ ВОССТАНОВЛЕНИЯ НИЖНИХ КОНЕЧНОСТЕЙ И ТУЛОВИЩА И РЕАБИЛИТАЦИОННЫЙ ТРЕНАЖЕР | 2016 |
|
RU2713971C2 |
| Устройство управления манипуляторами роботохирургического комплекса | 2020 |
|
RU2757969C1 |
Изобретение относится к устройству управления полетом летательного аппарата. Изобретение относится к устройству, содержащему рычаг управления, связанный с рамой, на которой установлены первый блок, соединенный с рамой, второй блок, соединенный с первым блоком, при этом рычаг управления соединен со вторым блоком, первый трансмиссионный вал, установленный с возможностью поворота относительно рамы, первый механизм соединения рычага управления с первым трансмиссионным валом так, чтобы поворот рычага управления вокруг первой оси (Х) вызывал вращение первого вала вокруг четвертой оси (А), второй трансмиссионный вал, установленный с возможностью поворота относительно рамы, второй механизм соединения рычага управления со вторым трансмиссионным валом так, чтобы поворот рычага управления вокруг второй оси (Y) вызывал вращение второго вала вокруг шестой оси (D), площадку, соединенную с рамой, при этом второй механизм соединения установлен с возможностью поворота на площадке и установлен с возможностью поворота на рычаге управления. Заявленное решение направлено на обеспечение приложения меньшего усилия, ощутимого на уровне рычага управления при повороте вокруг первой (X) и второй осей (Y) при управлении полетом летательного аппарата без необходимости использования дополнительных аппаратных приводов. 9 з.п. ф-лы, 6 ил.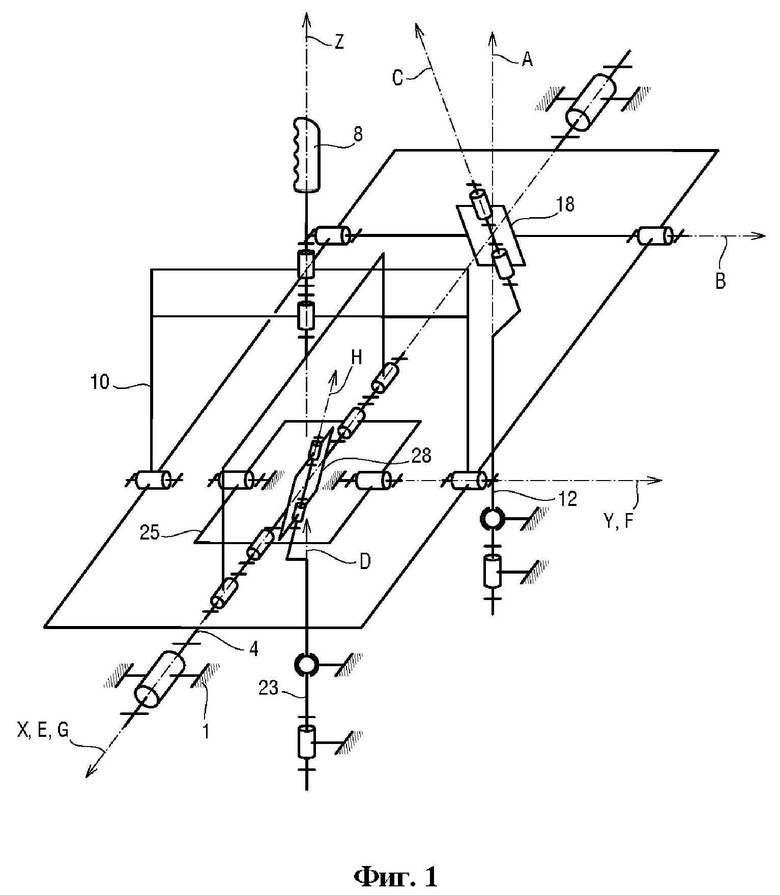
1. Устройство управления полетом летательного аппарата, содержащее рычаг (8) управления, связанный с рамой (1), на которой установлены:
- первый блок (4) передачи крутящего момента, соединенный с рамой через первую поворотную связь вокруг первой оси (Х),
- второй блок (10) передачи крутящего момента, соединенный с первым блоком (4) через вторую поворотную связь вокруг второй оси (Y), которая по существу является перпендикулярной к первой оси и пересекающейся с ней, при этом рычаг (8) управления соединен со вторым блоком (10) через третью поворотную связь вокруг третьей оси (Z), которая по существу является перпендикулярной к первой оси (Х) и ко второй оси (Y) и пересекающейся с ними,
- первый трансмиссионный вал (12), установленный с возможностью поворота относительно рамы вокруг четвертой оси (А) и соединенный по меньшей мере с первым приводным органом управления, вынесенным относительно рамы,
- первый механизм соединения, соединяющий рычаг управления с первым трансмиссионным валом так, чтобы поворот рычага управления вокруг первой оси (Х) вызывал вращение первого вала вокруг четвертой оси (А), при этом первый вал и первый механизм соединения соединены друг с другом через пятую поворотную связь вокруг пятой оси (С), наклоненной относительно первой оси (Х) и четвертой оси (А),
- второй трансмиссионный вал (23), установленный с возможностью поворота относительно рамы вокруг шестой оси (D) и соединенный по меньшей мере со вторым приводным органом управления, вынесенным относительно рамы,
- второй механизм соединения, соединяющий рычаг управления со вторым трансмиссионным валом так, чтобы поворот рычага управления вокруг второй оси (Y) вызывал вращение второго вала вокруг шестой оси (D), при этом второй вал и второй механизм соединения соединены друг с другом через седьмую поворотную связь вокруг седьмой оси (Н), наклоненной относительно второй оси и шестой оси,
- площадку (25), соединенную с рамой через восьмую поворотную связь вокруг восьмой оси (F), при этом второй механизм соединения установлен с возможностью поворота на площадке (25) при помощи девятой поворотной связи вокруг первой оси и установлен с возможностью поворота на рычаге (8) управления при помощи десятой поворотной связи вокруг первой оси.
2. Устройство по п. 1, выполненное так, что шестая ось (D) является по существу нормальной к плоскости, образованной первой осью (Х) и второй осью (Y), когда рычаг управления находится в нейтральном положении.
3. Устройство по п. 1 или 2, выполненное так, что четвертая ось (А) является по существу нормальной к плоскости, содержащей первую ось (Х) и вторую ось (Y), когда рычаг управления находится в нейтральном положении.
4. Устройство по одному из пп. 1-3, выполненное так, что первая ось (Х), вторая ось (Y), третья ось (Z), шестая ось (D), седьмая ось (H) и восьмая ось (F) по существу сходятся в первой точке, и первая ось, четвертая ось (А) и пятая ось (С) по существу сходятся во второй точке.
5. Устройство по одному из пп. 1-4, выполненное таким образом, что четвертая ось (А) и шестая ось (D) являются по существу параллельными.
6. Устройство по одному из пп. 1-5, в котором первый механизм соединения выполнен с возможностью соединения первого вала (12) с первым блоком (4) через карданный шарнир.
7. Устройство по одному из пп. 1-6, в котором второй механизм соединения выполнен с возможностью соединения второго вала (23) с рычагом (8) управления через карданный шарнир.
8. Устройство по одному из пп. 1-7, в котором второй блок (10) окружает снаружи первый блок (4).
9. Устройство по одному из пп. 1-8, в котором оба блока окружают снаружи площадку (25).
10. Устройство по одному из пп. 1-9, содержащее по меньшей мере один упор для ограничения движения рычага (8) управления вокруг первой оси или вокруг второй оси, при этом упор выполнен в виде вращающегося ролика.
| FR 3011815 A1, 17.04.2015 | |||
| Устройство для удаления крупногабаритных деталей из рабочей зоны штампа | 1973 |
|
SU565757A1 |
| СПОСОБ ОБРАБОТКИ ОТХОДЯЩИХ ГАЗОВ УСТАНОВКИ ДЛЯ ПОЛУЧЕНИЯ МЕЛАМИНА | 2012 |
|
RU2586702C2 |
| WO 2015055434 A1, 23.04.2015. | |||

