ОБЛАСТЬ ТЕХНИКИ
Данное изобретение относится к области беспилотных летательных аппаратов, в частности к двухосным платформам для использования в малоразмерных беспилотных летательных аппаратах и трехосным платформам для использования в малоразмерных беспилотных летательных аппаратах с целью аэро(фото)съемки или воздушного наблюдения.
УРОВЕНЬ ТЕХНИКИ
Беспилотный летательный аппарат характеризуется малыми габаритами, легким весом, низкой себестоимостью, гибкостью эксплуатации и высокой безопасностью и может широко применяться в таких сферах деятельности как аэро(фото)съемка, воздушное наблюдение, поиск и спасение, а также исследование природных ресурсов. Так как беспилотный летательный аппарат испытывает негативные воздействия высокочастотной вибрации и низкочастотного дрожания, его необходимо оборудовать стабилизирующей платформой для аэро(фото)съемки, которая смещает видеокамеру или фотоаппарат для достижения устойчивости съемки. Стабилизирующие платформы для аэро(фото)съемки определяют изменения положения видеокамеры или фотоаппарата обыкновенно посредством электронного устройства и управляют обратной балансировкой управляющего двигателя для достижения стабилизации видеокамеры или фотоаппарата. На известном уровне техники большинство платформ применяют механический привод для достижения двухосного, трехосного или многоосного поворота видеокамеры или фотоаппарата. Так как у зубчатого привода всегда имеется некоторое запаздывание во время нахождения беспилотного летательного аппарата в различных положениях (как например, поворот, парящий полет, набор высоты, снижение или наклон), время срабатывания платформы является большим, управляющий двигатель медленно выполняет корректировку, поэтому видеокамере или фотоаппарату крайне сложно своевременно откорректировать угол наклона, чтобы адаптироваться к изменениям положения беспилотного летательного аппарата, что в результате влияет на качество изображения видеокамеры или фотоаппарата. В то же время платформа с зубчатым приводом не обладает высокой гибкостью работы, не может выполнять плавно изменяемую корректировку, поэтому точность корректировки не является высокой и не может устранить влияние низкочастотного дрожания или наклона корпуса ЛА, что крайне усложняет получение изображений высокого качества и достижение профессиональных целей.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В настоящем изобретении предложена платформа для использования в малоразмерном беспилотном летательном аппарате для решения технической проблемы, которая состоит в том, что платформа для использования в малоразмерном беспилотном летательном аппарате на известном уровне техники имеет долгое время срабатывания из-за использования зубчатого привода, не может своевременно адаптироваться к различным летным положениям беспилотного летательного аппарата и не может выполнять плавно изменяемую корректировку, из-за чего точность корректировки не является высокой.
Техническое решение, принятое в настоящем изобретении для решения технической проблемы, состоит в следующем: двухосная платформа для использования в малоразмерном беспилотном летательном аппарате сконструирована таким образом, что содержит: раму в сборе, трансмиссионный блок и съемочный блок. Рама в сборе содержит первую скобу, вторую скобу и третью скобу; съемочный блок закреплен на первой скобе; первая скоба свободно вращается вокруг второй скобы, а вторая скоба свободно вращается вокруг третьей скобы. Трансмиссионный блок содержит первый двигатель и второй двигатель, где первый двигатель приводит в движение первую скобу для поворота вокруг своей оси по отношению ко второй скобе, а второй двигатель приводит в движение вторую скобу для поворота вокруг своей оси по отношению к третьей скобе.
В соответствии с настоящим изобретением предпочтительно, чтобы в двухосной платформе для использования в малоразмерном беспилотном летательном аппарате ось вращения Х первой скобы располагалась перпендикулярно к оси вращения Y второй скобы.
В соответствии с настоящим изобретением предпочтительно, чтобы в двухосной платформе для использования в малоразмерном беспилотном летательном аппарате статор первого электродвигателя был закреплен на первой скобе, а ротор первого электродвигателя был закреплен на второй скобе.
В соответствии с настоящим изобретением предпочтительно, чтобы в двухосной платформе для использования в малоразмерном беспилотном летательном аппарате статор второго электродвигателя был закреплен на второй скобе, а ротор второго электродвигателя был закреплен на третьей скобе.
В соответствии с настоящим изобретением предпочтительно, чтобы в двухосной платформе для использования в малоразмерном беспилотном летательном аппарате центр тяжести первой скобы и съемочного блока приходился на ось вращения Х первой скобы.
В соответствии с настоящим изобретением предпочтительно, чтобы в двухосной платформе для использования в малоразмерном беспилотном летательном аппарате центр тяжести первой скобы, второй скобы и съемочного блока в совокупности приходился на ось вращения Y второй скобы.
В настоящем изобретении также предложена 3-осная платформа для использования в малоразмерном беспилотном летательном аппарате, содержащая в себя вышеупомянутую двухосную платформу для использования в малоразмерном беспилотном летательном аппарате, в которой трансмиссионный блок дополнительно содержит третий электродвигатель, рама в сборе дополнительно включает соединительную раму для крепления снаружи, а третий электродвигатель вращает третью скобу вокруг своей оси Z по отношению к соединительной раме.
В соответствии с настоящим изобретением предпочтительно, чтобы в 3-осной платформе для использования в малоразмерном беспилотном летательном аппарате статор третьего электродвигателя был закреплен на соединительной раме, а ротор третьего электродвигателя был закреплен на третьей скобе.
3-осная платформа для использования в малоразмерном беспилотном летательном аппарате, предпочтительно отличающаяся тем, что центр тяжести первой скобы, второй скобы, третьей скобы и съемочного блока в совокупности приходится на ось вращения Z третьей скобы.
В 3-осной платформе для использования в малоразмерном беспилотном летательном аппарате в соответствии с настоящим изобретением трансмиссионный блок дополнительно содержит четвертый электродвигатель, который вращает съемочный блок вокруг своей оси.
Настоящее изобретение имеет следующие преимущества: изменение положения съемочного блока при восходящем или нисходящем наклоне в вертикальной плоскости достигается посредством вращения первой скобы по отношению ко второй скобе; вращение самого съемочного блока достигается посредством наклонного вращения второй скобы влево или вправо по отношению к третьей скобе, круговая съемка съемочным блоком достигается посредством вращения третьей скобы по окружности; двигатели - источники двигательной энергии - напрямую соединены с рамой платформы, тем самым потребляя меньше энергии и экономя электрическую энергию. К тому же привод от электродвигателя позволяет достичь плавно изменяемой корректировки, т.к. двигатели имеют короткое время срабатывания и способны быстро приходить в движение и останавливаться, или оперативно корректировать величину скорости вращения для адаптации к различным летным положениям беспилотного летательного аппарата, тем самым улучшая устойчивость съемки съемочным блоком.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Настоящее изобретение будет описано далее со ссылкой на варианты осуществления и чертежи, на которых:
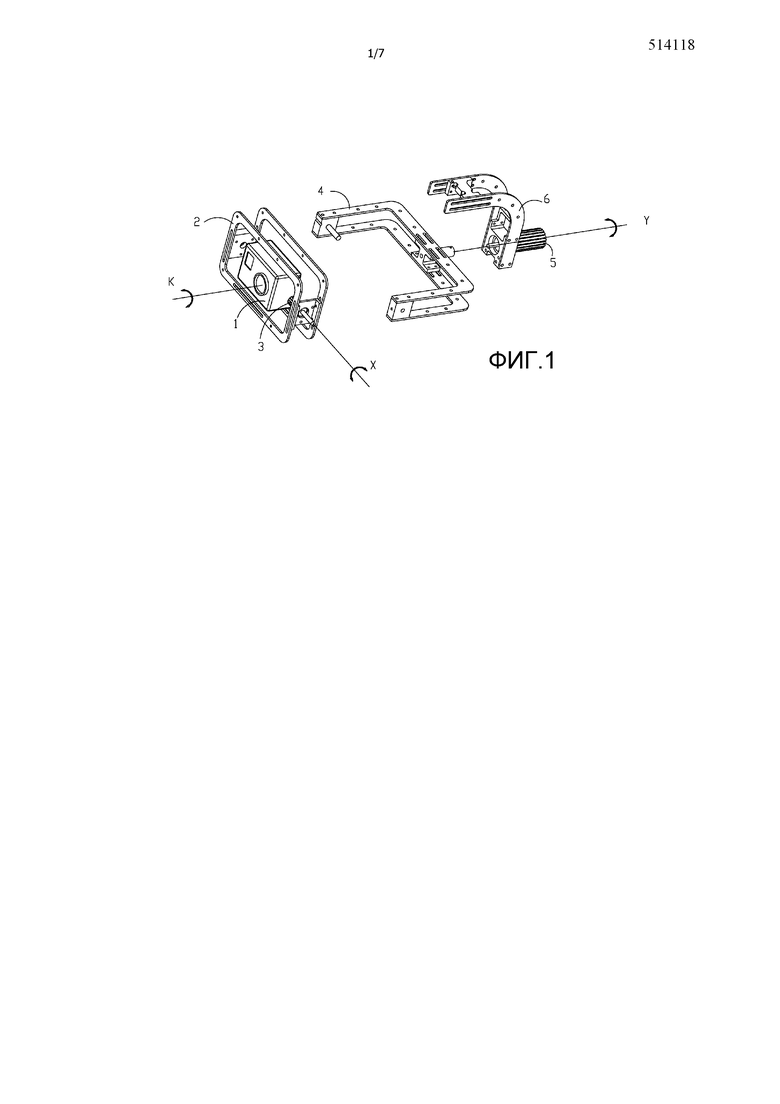
Фиг.1 представляет собой структурную схему 2-осной платформы в разобранном виде для использования в малоразмерном беспилотном летательном аппарате в соответствии с вариантом осуществления 1 настоящего изобретения.
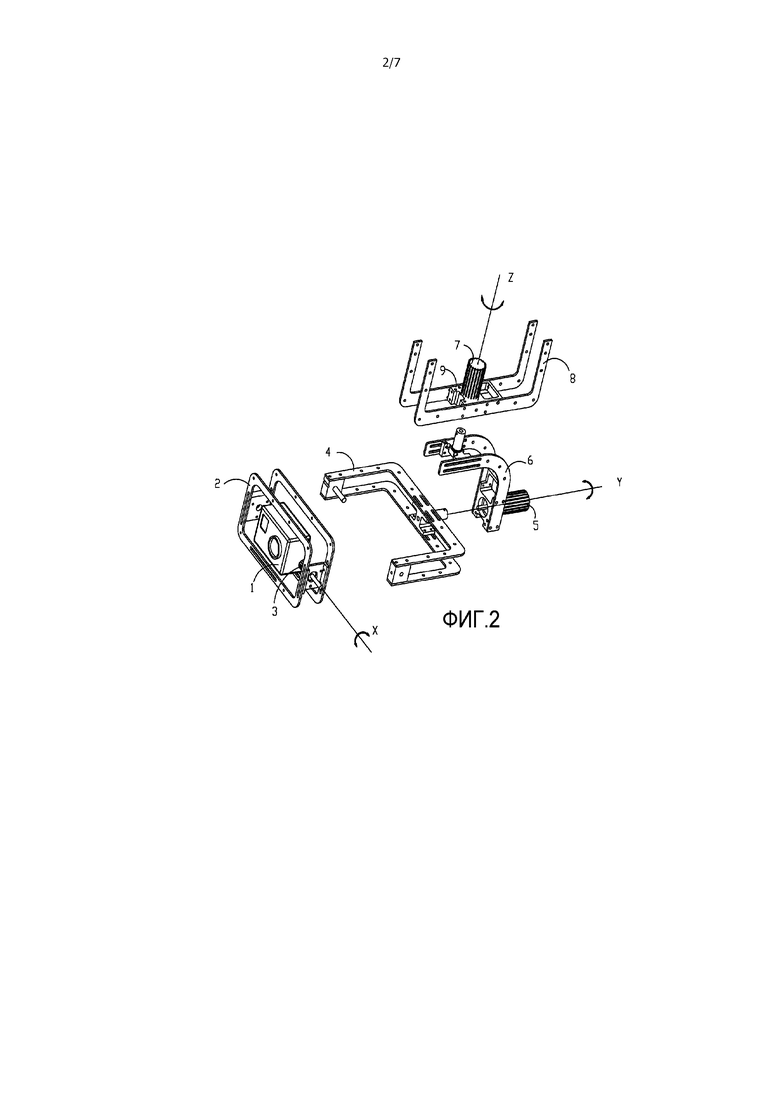
Фиг.2 представляет собой структурную схему 3-осной платформы в разобранном виде для использования в малоразмерном беспилотном летательном аппарате в соответствии с вариантом осуществления 2 настоящего изобретения.
Фиг.3 представляет собой структурную схему 3-осной платформы в собранном виде №1 для использования в малоразмерном беспилотном летательном аппарате в соответствии с вариантом осуществления 2 настоящего изобретения.
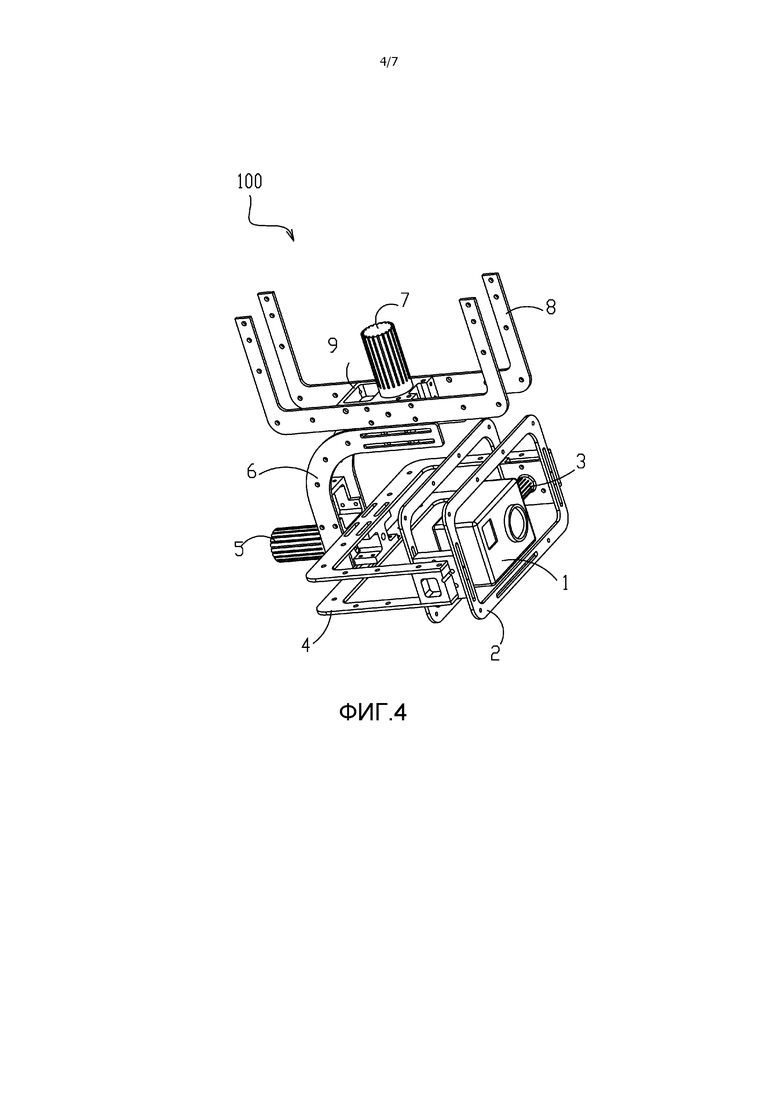
Фиг.4 представляет собой структурную схему 3-осной платформы в собранном виде №2 для использования в малоразмерном беспилотном летательном аппарате в соответствии с вариантом осуществления 2 настоящего изобретения.
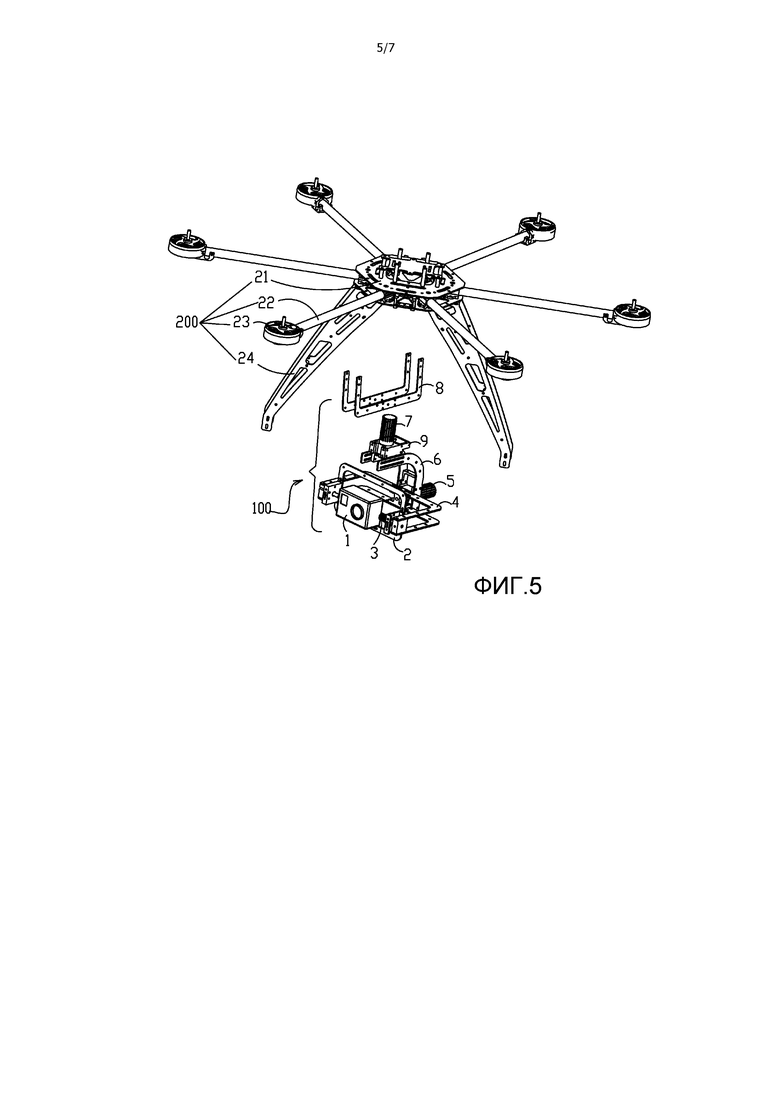
Фиг.5 представляет собой структурную схему 3-осной платформы в разобранном виде для использования в малоразмерном беспилотном летательном аппарате в соответствии с вариантом осуществления 2 настоящего изобретения, которая крепится к многовинтовой опорной раме.
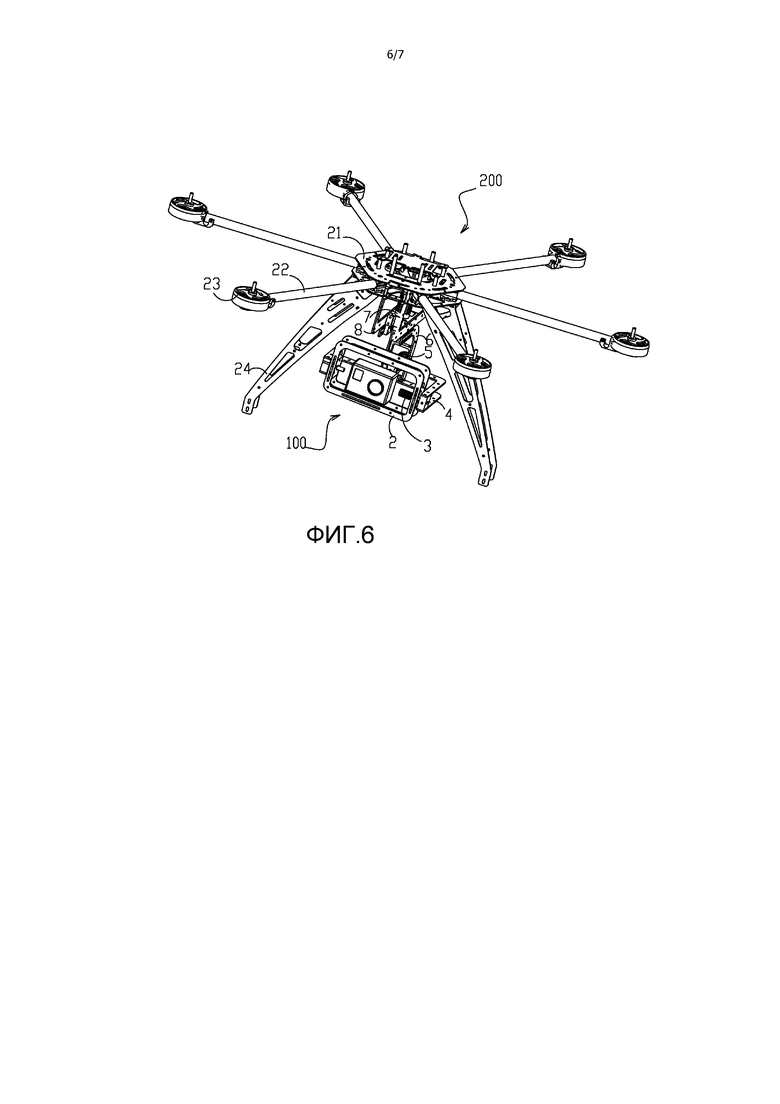
Фиг.6 представляет собой структурную схему 3-осной платформы в собранном виде №1 для использования в малоразмерном беспилотном летательном аппарате в соответствии с вариантом осуществления 2 настоящего изобретения, которая крепится к многовинтовой опорной раме.
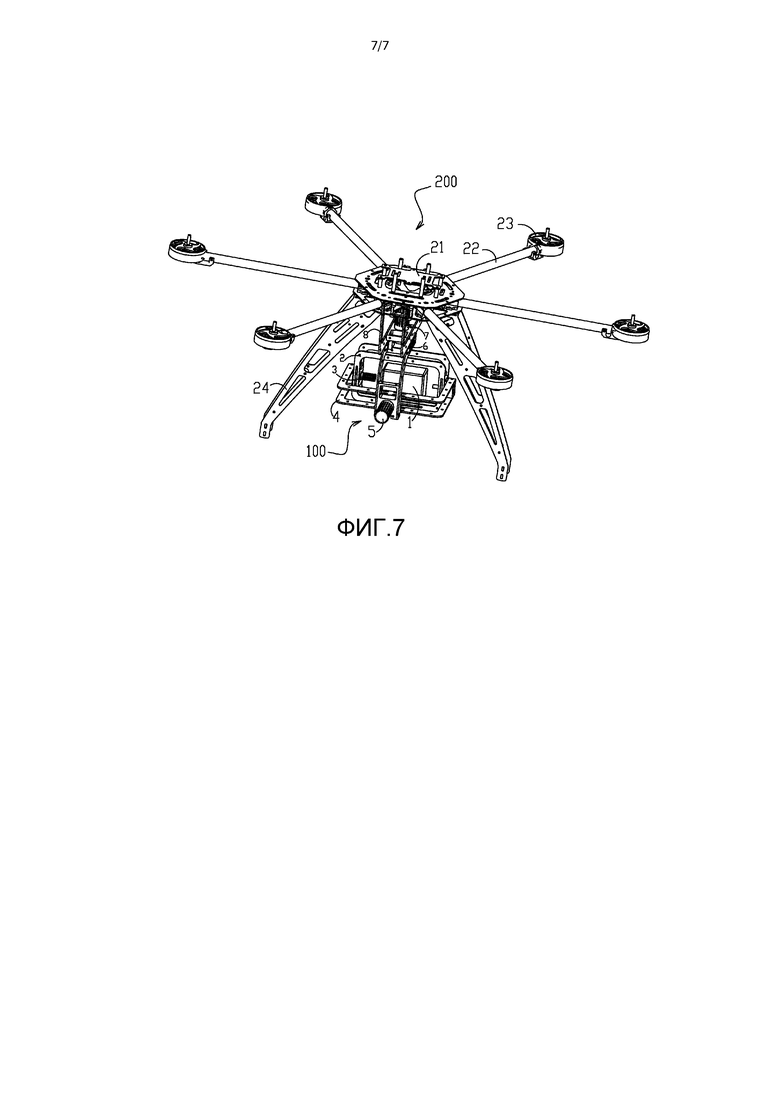
Фиг.7 представляет собой структурную схему 3-осной платформы в собранном виде №2 для использования в малоразмерном беспилотном летательном аппарате в соответствии с вариантом осуществления 2 настоящего изобретения, которая крепится к многовинтовой опорной раме.
Детальное описание предпочтительных вариантов осуществления
Конкретные варианты осуществления настоящего изобретения будут детально описаны со ссылкой на чертежи для лучшего понимания технических свойств, предметов и влияний настоящего изобретения.
Вариант осуществления 1
Как показано на фиг.1, в настоящем изобретении предложена 2-осная платформа для использования в малоразмерном беспилотном летательном аппарате, содержащая, в частности, раму в сборе, трансмиссионный блок и съемочный блок 1. Рама в сборе содержит первую скобу 2 и вторую скобу 4; съемочный блок 1 закреплен на первой скобе 2. В данном случае форма съемочного блока 1 не ограничивается прямоугольником, как показано на фиг.1, и может также быть круглой, или другой формы, которые встречаются на рынке. Для достижения вращения съемочного блока 1 вокруг оси X (т. е. оси вращения первой скобы 2), первая скоба 2 поворотно соединена со второй скобой 4 с помощью фиксатора на конце. Такая поворотная конструкция делает возможным восходящий или нисходящий поворот съемочного блока 1. Для адаптации к наклонному полету влево или вправо беспилотного летательного аппарата съемочный блок 1 осуществляет наклонный поворот вправо или влево соответственно для достижения стабилизации фото- или видеосъемки. Как показано на фиг.1, вторая скоба 4 вращается вокруг собственной оси Y, а также вторая скоба 4 поворачивается влево или вправо на определенный угол, чтобы таким образом повернуть первую скобу 2 и съемочный блок 1 в целом. Для приведения в движение первой скобы 2 и второй скобы 4 в настоящем конструктивном воплощении предложены электродвигатели в качестве источника двигательной энергии. Использование компактного электродвигателя с прямой передачей имеет следующие преимущества: (1) двигатель работает напрямую с меньшим энергопотреблением, тем самым экономя энергию и защищая окружающую среду; (2) двигатель имеет короткое время срабатывания и способен выполнять быструю и своевременную корректировку для адаптации к различным летным положениям беспилотного летательного аппарата, что улучшает устойчивость съемки съемочным блоком; (3) двигатель может достичь плавно изменяемой корректировки и равномерного изменения скорости, способен корректировать величину скорости постоянно и произвольно в допустимом диапазоне частот вращения, оказывает меньшее влияние на составные части механизмов, и обладает высокой прочностью. В частности, как показано на фиг.1, трансмиссионный блок содержит первый двигатель 3 и второй двигатель 5, где первый двигатель 3 непосредственно приводит в движение первую скобу 2, вращая ее вокруг собственной оси (т.е. оси X) по отношению ко второй скобе 4, а второй двигатель 5 непосредственно приводит в движение вторую скобу 4, вращая ее вокруг собственной оси (т.е. оси Y). Настоящий вариант реализации использует электродвигатели в качестве движущей силы, которые напрямую соединены с рамой платформы, тем самым потребляя меньше энергии и экономя электрическую энергию. К тому же привод от электродвигателя позволяет достичь плавно изменяемой корректировки, т.к. двигатели имеют короткое время срабатывания и способны быстро приходить в движение и останавливаться, или оперативно корректировать величину скорости вращения для адаптации к различным летным положениям беспилотного летательного аппарата, тем самым улучшая устойчивость съемки съемочным блоком.
Для обеспечения выполнения электродвигателями своевременного выравнивания углов поворота является предпочтительным, чтобы ось вращения X первой скобы 2 располагалась перпендикулярно к оси вращения Y второй скобы 4.
В частности, как показано на фиг.1, статор первого двигателя 3 закреплен на первой скобе 2, а ротор первого двигателя 3 закреплен на второй скобе 4. Первый двигатель 3 непосредственно приводит в движение вторую скобу 4 для вращения первой скобы 2 по отношению ко второй скобе 4. Здесь следует заметить, что статор и ротор первого двигателя 3 являются взаимозаменяемыми по расположению, т.е. ротор первого двигателя 3 может быть закреплен на первой скобе 2, а статор может быть закреплен на второй скобе 4, что позволяет также достичь функции относительного вращения.
Как показано на фиг.1, предпочтительно, чтобы статор второго двигателя 5 был закреплен на третьей скобе 6, а ротор второго двигателя 5 был закреплен на второй скобе 4. Второй двигатель 5 непосредственно приводит в движение вторую скобу 4 для вращения второй скобы 4 по отношению к третьей скобе 6. Здесь следует заметить, что статор и ротор второго двигателя 5 являются взаимозаменяемыми по расположению, т.е. ротор второго двигателя 5 может быть закреплен на третьей скобе 6, а статор может быть закреплен на второй скобе 4, что позволяет также достичь функции относительного вращения.
Во время полета беспилотного летательного аппарата, когда центральная ось объектива съемочного блока 1 поворачивается в положение, перпендикулярное плоскости, образуемой осью X и осью Y, поворот второй скобы 4 влево или вправо вокруг оси Y может приводить в движение объектив съемочного блока 1 для осмотра в определенном промежутке перпендикулярной плоскости и не позволяет достичь собственного вращения объектива съемочного блока 1. Для осуществления всенаправленного выравнивания угла объектива, когда объектив поворачивается в положение, перпендикулярное плоскости, образуемой осью X и осью Y, на основании вышеуказанного технического решения в качестве предпочтительного варианта реализации трансмиссионный блок содержит четвертый двигатель, который приводит в движение съемочный блок 1 для вращения его вокруг своей оси K. Когда ось K является параллельной или соосной оси Y, поворот второй скобы 4 вокруг оси Y позволяет достичь собственного вращения объектива съемочного блока 1; когда ось K является перпендикулярной оси Y, объектив съемочного блока 1 достигает собственного вращения посредством четвертого двигателя.
Кроме того, для улучшения устойчивости во время съемки съемочным блоком 1 центр тяжести первой скобы 2 и съемочного блока 1 приходится на ось вращения первой скобы 2. При помощи механического анализа было выявлено, что, когда центр тяжести первой скобы 2 и съемочного блока 1 приходится на ось вращения Х первой скобы 2, первая скоба 2 не создает момент вращения под любым углом поворота, т.е. первая скоба 2 не будет покачиваться из стороны в сторону из-за момента, поэтому устойчивость съемочного блока 1 во время поворота улучшается. Во время устойчивого полета беспилотного летательного аппарата, а именно, когда привод от электродвигателя не является необходимым, первая скоба 2 и съемочный блок 1 также находятся в динамически уравновешенном состоянии.
Также при помощи механического анализа было выявлено, что для улучшения устойчивости и предотвращения поворота всей конструкции вокруг оси Y из-за момента вращения предпочтительно, чтобы центр тяжести первой скобы 2, второй скобы 4 и съемочного блока 1 в совокупности приходился на ось вращения второй скобы 4, как показано на фиг.1.
На основании вышеуказанного технического решения является предпочтительным, чтобы платформа, предложенная настоящим вариантом реализации, была адаптирована для малоразмерного беспилотного летательного аппарата для аэро(фото)съемки и воздушного наблюдения, а первый двигатель 3, второй двигатель 5 и четвертый двигатель являлись предпочтительно бесщеточными электродвигателями постоянного тока. Преимущества использования бесщеточных электродвигателей постоянного тока в платформе, применяемой в беспилотном летательном аппарате, заключаются в следующем: (1) электронная коммутация, вместо обыкновенной механической коммутации, позволяет достичь надежности в работе, постоянной износостойкости, низкой частоты отказов и более долгого ресурса, который составляет в шесть раз больше, чем ресурс щеточного двигателя; (2) бесщеточный электродвигатель постоянного тока является статическим двигателем с небольшим холостым током; (3) высокий КПД; (4) небольшой размер.
Кроме того, трансмиссионный блок дополнительно содержит инерционный датчик, микропроцессор и сигнальную линию; инерционный датчик содержит гироскоп для приема сигнала угловой скорости и акселерометр для приема сигнала ускорения, микропроцессор управляет включением, выключением и величиной скорости вращения первого двигателя 3 и второго двигателя 5 в соответствии с сигналом угловой скорости и сигналом ускорения. Положения беспилотного летательного аппарата своевременно и динамично контролируются инерционным датчиком, а включение и выключение двигателей контролируется быстро и своевременно, что улучшает устойчивость съемки съемочным блоком.
На основе указанного выше технического решения 2-осная платформа для использования в беспилотном летательном аппарате может быть конструктивно усовершенствована, чтобы иметь возможность поворачиваться в любых других двух направлениях. Улучшенная платформа для использования в малоразмерном беспилотном летательном аппарате представляет собой 2-осную платформу, которая в частности, содержит раму в сборе, трансмиссионный блок и съемочный блок 1. Рама в сборе содержит первую скобу 2, третью скобу 6 и соединительную раму 8. Съемочный блок 1 закреплен на первой скобе 2, первая скоба 2 поворотно соединена с третьей скобой 6. Такая поворотная конструкция делает возможным восходящий или нисходящий поворот съемочного блока 1. Соединительная рама 8 снаружи закреплена на вертолете или многовинтовом летательном аппарате; третья скоба 6 вращается по кругу по отношению к соединительной раме 8, таким образом, вращая платформу в целом по кругу. Для приведения в движение первой скобы 2 и третьей скобы 6 в качестве источника энергии настоящим вариантом реализации предложен электродвигатель. Использование компактного электродвигателя с прямой передачей имеет следующие преимущества: (1) двигатель работает напрямую с меньшим энергопотреблением, тем самым экономя энергию и защищая окружающую среду; (2) двигатель имеет короткое время срабатывания и способен выполнять быструю и своевременную корректировку для адаптации к различным летным положениям беспилотного летательного аппарата, что улучшает устойчивость съемки съемочным блоком; (3) двигатель может достичь плавно изменяемой корректировки и равномерного изменения скорости, способен корректировать величину скорости постоянно и произвольно в допустимом диапазоне частот вращения, оказывает меньшее влияние на составные части механизмов и обладает высокой прочностью. В частности, трансмиссионный блок содержит первый двигатель 3 и третий двигатель 7, в котором первый двигатель 3 непосредственно приводит в движение первую скобу 2 для поворота вокруг своей оси (т.е. оси X) и тем самым осуществляя восходящий и нисходящий поворот объектива съемочного блока 1; третий двигатель 7 непосредственно приводит в движение третью скобу 6 для кругового вращения вокруг своей оси (т.е. оси Z), таким образом, приводя в движение съемочный блок 1 для выполнения круговой съемки вокруг оси Z.
Также 2-осная платформа для использования в беспилотном летательном аппарате может быть конструктивно усовершенствована для достижения одновременного наклонного вращения влево и вправо и кругового вращения съемочного блока 1. Улучшенная платформа содержит, в частности, раму в сборе, трансмиссионный блок и съемочный блок 1. Рама в сборе содержит вторую скобу 4 и третью скобу 6. Съемочный блок 1 закреплен на второй скобе 4, а вторая скоба 4 вращается вокруг оси Y на определенный угол. Вращение второй скобы 4 наклоняет съемочный блок 1 влево или вправо. Третья скоба 6 вращается по окружности вокруг своей оси (т.е. оси Z), приводя, таким образом, съемочный блок 1 в движение для осмотра и съемки по окружности. Трансмиссионный блок содержит второй двигатель 5 и третий двигатель 7, в котором второй двигатель 5 непосредственно приводит в движение вторую скобу 4 для поворота на определенный угол вокруг своей оси (т.е. оси Y) по отношению к третьей скобе 6, а третий двигатель 7 непосредственно приводит в движение третью скобу 6 для поворота по окружности вокруг своей оси (т.е. оси Z). Предпочтительно, чтобы ось вращения Y второй скобы 4 располагалась перпендикулярно к оси вращения Z третьей скобы 6. Рама механизма дополнительно содержит соединительную раму 8, а третья скоба 6 поворотно соединена с соединительной рамой 8. В частности, статор третьего двигателя 7 закреплен на соединительной раме 8, а его ротор жестко соединен с третьей скобой 6.
В указанном выше варианте реализации статор и ротор каждого из электродвигателей - первого 3, второго 5 и третьего 7 - являются взаимозаменяемыми по расположению, что может также способствовать вращению.
Вариант реализации 2
В предпочтительном варианте реализации, как показано на фиг.2, 3 и 4, в настоящем изобретении предложена платформа 100 для использования в беспилотном летательном аппарате. Такая платформа 100 представляет собой платформу, которая может вращаться в трех плоскостях и содержит, в частности, раму в сборе, трансмиссионный блок и съемочный блок 1. Как показано на фиг.2, рама в сборе содержит первую скобу 2, вторую скобу 4, третью скобу 6 и соединительную раму 8. Съемочный блок 1 закреплен на первой скобе 2. Для достижения вращения съемочного блока 1 вокруг оси X (т. е. оси вращения первой скобы 2), первая скоба 2 поворотно соединена со второй скобой 4. Такая поворотная конструкция делает возможным восходящий или нисходящий поворот съемочного блока 1. Для адаптации к наклонному полету влево или вправо беспилотного летательного аппарата съемочный блок 1 осуществляет наклонный поворот вправо или влево соответственно для достижения стабилизации фото- или видеосъемки. Как показано на фиг.2, вторая скоба 4 поворотно соединена с третьей скобой 6, а также вторая скоба 4 поворачивается влево или вправо, чтобы таким образом осуществлять вращение первой скобы 2 и съемочного блока 1 в целом. Чтобы сделать возможным вращение съемочного блока 1 по окружности для осуществления круговой съемки в пределах 360 градусов, соединительная рама 8 крепится снаружи к вертолету или многовинтовому летательному аппарату; третья скоба 6 может вращаться вокруг оси Z по отношению к соединительной раме 8. Для приведения в движение первой скобы 2, второй скобы 4 и третьей скобы 6 в настоящем конструктивном воплощении предложен электродвигатель в качестве источника двигательной энергии. Использование компактного электродвигателя с прямой передачей имеет следующие преимущества: (1) двигатель работает напрямую с меньшим энергопотреблением, тем самым экономя энергию и защищая окружающую среду; (2) двигатель имеет короткое время срабатывания и способен выполнять быструю и своевременную корректировку для адаптации к различным летным положениям беспилотного летательного аппарата, что улучшает устойчивость съемки съемочным блоком; (3) двигатель может достичь плавно изменяемой корректировки и равномерного изменения скорости, способен корректировать величину скорости постоянно и произвольно в допустимом диапазоне частот вращения, оказывает меньшее влияние на составные части механизмов и обладает высокой прочностью. В частности, как показано на фиг.2, 3 и 4, трансмиссионный блок содержит первый двигатель 3, второй двигатель 5 и третий двигатель 7, где первый двигатель 3 непосредственно приводит в движение первую скобу 2, вращая ее вокруг собственной оси X по отношению ко второй скобе 4, второй двигатель 5 непосредственно приводит в движение вторую скобу 4, вращая ее вокруг собственной оси Y по отношению к третьей скобе 6, и третий двигатель 7 непосредственно приводит в движение третью скобу 6, вращая ее по окружности вокруг собственной оси Z. Настоящий вариант реализации использует электродвигатели в качестве движущей силы, которые напрямую соединены с рамой платформы, тем самым потребляя меньше энергии и экономя электрическую энергию. К тому же привод от электродвигателя позволяет достичь плавно изменяемой корректировки, т.к. двигатели имеют короткое время срабатывания и способны быстро приходить в движение и останавливаться, или оперативно корректировать величину скорости вращения для адаптации к различным летным положениям беспилотных летательных аппаратов, тем самым улучшая устойчивость съемки съемочным блоком.
Является предпочтительным, чтобы ось вращения X первой скобы 2, ось вращения Y второй скобы 4 и ось вращения Z третьей скобы 6 располагались перпендикулярно друг к другу.
В частности, как показано на фиг.2, статор третьего двигателя 7 закреплен на шасси 8, а его ротор закреплен на третьей скобе 6. Более того, две U-образные соединительные рамки 8 жестко соединены позиционной вставкой 9, а статор третьего двигателя 7 крепится к позиционной вставке 9 с помощью болта или винта. Соединительная вставка 11 закреплена на третьей скобе 6, а муфта 10 со встроенным сквозным отверстием закреплена на соединительной вставке 11. Сквозное отверстие в муфте 10 совпадает с ротором третьего двигателя 7, ротор вставляется в сквозное отверстие. Следует понимать, что статор и ротор являются взаимозаменяемыми по расположению, что может также способствовать вращению.
На основе указанного выше технического решения для улучшения устойчивости съемочного блока 1 во время съемки центр тяжести первой скобы 2 и съемочного блока 1 приходится на ось вращения Х первой скобы 2. При помощи механического анализа было выявлено, что, когда центр тяжести первой скобы 2 и съемочного блока 1 приходится на ось вращения Х первой скобы 2, первая скоба 2 не создает момент вращения под любым углом поворота, т.е. первая скоба 2 не будет покачиваться из стороны в сторону из-за момента, поэтому устойчивость съемочного блока 1 во время поворота улучшается. Во время устойчивого полета беспилотного летательного аппарата, то есть, когда привод от электродвигателя не является необходимым, первая скоба 2 и съемочный блок 1 также находятся в динамически уравновешенном состоянии.
Также для улучшения устойчивости и предотвращения поворота всей конструкции вокруг оси Y из-за момента вращения предпочтительно, чтобы центр тяжести первой скобы 2, второй скобы 4 и съемочного блока 1 в целом приходился на ось вращения второй скобы 4, как показано на фиг.1.
Также для предотвращения поворота всей конструкции вокруг оси Z из-за момента вращения, центр тяжести первой скобы 2, второй скобы 4, третьей скобы 6 и съемочного блока 1 в целом приходится на ось вращения Z третьей скобы 6, как показано на фиг.2 и фиг.3.
Является предпочтительным, чтобы первый двигатель 3, второй двигатель 5, третий двигатель 7 и четвертый двигатель являлись бесщеточными электродвигателями постоянного тока. Преимущества использования бесщеточных электродвигателей постоянного тока в платформе 100, применяемой в беспилотном летательном аппарате, заключаются в следующем: (1) электронная коммутация, вместо обыкновенной механической коммутации, позволяет достичь надежности в работе, постоянной износостойкости, низкой частоты отказов и более долгого ресурса, который составляет в шесть раз больше, чем ресурс щеточного двигателя; (2) бесщеточный электродвигатель постоянного тока является статическим двигателем с небольшим холостым током; (3) высокий КПД; (4) небольшой размер.
Кроме того, трансмиссионный блок дополнительно содержит инерционный датчик, микропроцессор и сигнальную линию; инерционный датчик содержит гироскоп для приема сигнала угловой скорости и акселерометр для приема сигнала ускорения; микропроцессор управляет включением, выключением и величиной скорости вращения первого двигателя 3 и второго двигателя 5 в соответствии с сигналом угловой скорости и сигналом ускорения. Положения беспилотного летательного аппарата своевременно и динамично контролируются инерционным датчиком, а включение и выключение двигателей контролируется быстро и своевременно, что улучшает устойчивость съемки съемочным блоком.
На основании указанного выше технического решения рекомендуется улучшение конструкции на основе 3-осной платформы 100 для использования в беспилотном летательном аппарате для дополнительной функции собственного вращения объектива съемочного блока 1. Здесь следует отметить, что форма съемочного блока 1 не ограничивается формой, указанной на фиг.2 или фиг.3, и что съемочный блок 1 может также быть в форме вращающегося тела или других фигур. Во время полета беспилотного летательного аппарата, когда центральная ось объектива съемочного блока 1 поворачивается в положение, перпендикулярное плоскости, образуемой осью X и осью Y, поворот второй скобы 4 влево или вправо вокруг оси Y может двигать объектив съемочного блока 1 для осмотра в определенном промежутке перпендикулярной плоскости и не может достичь собственного вращения объектива съемочного блока 1. Для осуществления всенаправленного выравнивания угла объектива, когда объектив поворачивается в положение, перпендикулярное плоскости, образуемой осью X и осью Y, трансмиссионный блок дополнительно содержит четвертый двигатель, который непосредственно приводит в движение съемочный блок 1 для вращения вокруг своей собственной оси K. Когда ось K является параллельной или соосной оси Y, поворот второй скобы 4 вокруг оси Y позволяет достичь собственного вращения объектива съемочного блока 1; когда ось K является перпендикулярной оси Y, объектив съемочного блока 1 достигает собственного вращения посредством четвертого двигателя.
Следует заметить, что 2-осная платформа для использования в малоразмерном беспилотном летательном аппарате и 3-осная платформа 100 для использования в малоразмерном беспилотном летательном аппарате, предложенные в первом и втором вариантах реализации, могут устанавливаться на вертолет или на многовинтовой летательный аппарат, например летательный аппарат с четырьмя, шестью или восемью лопастями. Фиг.5, 6 и 7 - это структурная схема 3-осной платформы 100 для использования в малоразмерном беспилотном летательном аппарате, которая крепится к многовинтовому летательному аппарату. Многовинтовой летательный аппарат включает многовинтовую опорную раму 200, инерциальный измерительный модуль, GPS и другие элементы. Многовинтовая опорная рама 200 включает основание 21, несколько опорных рычагов 22, неподвижно закрепленных и равномерно распределенных на основании 21, и роторы 23, расположенные на опорных рычагах 22. Соединительная рама 8 3-осной платформы 100 для использования в малоразмерном беспилотном летательном аппарате прикреплена к основанию 21 с помощью винтов, клепок или сварки, позиционная вставка 9 прикреплена к соединительной раме 8 при помощи винта, а статор третьего двигателя 7 прикреплен к позиционной вставке 9. Следует понимать, что статор и ротор являются взаимозаменяемыми по расположению, что может также способствовать вращению.
Варианты реализации настоящего изобретения были описаны выше со ссылкой на чертежи. Тем не менее настоящее изобретение не ограничивается приведенными выше вариантами. Конкретные варианты, приведенные выше, являются скорее иллюстративными, чем ограничительными. С учетом настоящего изобретения специалисты в данной области, не отклоняясь от сути настоящего изобретения и в пределах объема изобретения, определенного в прилагаемых пунктах патентной заявки, вправе создать много форм, все из которых подпадают под действие настоящего изобретения.
Описание позиций
100 платформа
200 многовинтовая опорная рама
1 съемочный блок
2 первая скоба
3 первый двигатель
4 вторая скоба
5 второй двигатель
6 третья скоба
7 третий двигатель
8 соединительная рама
9 позиционная вставка
10 муфта
11 соединительная вставка
21 основание
22 опорный рычаг
23 ротор
24 опорная рама
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХОСНАЯ ПЛАТФОРМА ДЛЯ ИСПОЛЬЗОВАНИЯ В БЕСПИЛОТНОМ ЛЕТАТЕЛЬНОМ АППАРАТЕ, ТРЕХОСНАЯ ПЛАТФОРМА ДЛЯ ИСПОЛЬЗОВАНИЯ В БЕСПИЛОТНОМ ЛЕТАТЕЛЬНОМ АППАРАТЕ И МНОГОВИНТОВОЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2011 |
|
RU2572946C2 |
| Аэроэлектроподъемный летательный аппарат | 2018 |
|
RU2696051C1 |
| МАЛОРАЗМЕРНЫЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С ВОЗМОЖНОСТЬЮ ПЕРЕМЕЩЕНИЯ ПО ПОВЕРХНОСТИ ЗЕМЛИ | 2023 |
|
RU2807493C1 |
| Комплекс для определения пространственных координат удаленного объекта, расположенного на местности | 2020 |
|
RU2744427C1 |
| МНОГОВИНТОВОЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2014 |
|
RU2567496C1 |
| Автоматическая станция зарядки и обслуживания беспилотных летательных аппаратов и беспилотный летательный аппарат, работающий совместно с ней | 2019 |
|
RU2721048C1 |
| МАЛОРАЗМЕРНЫЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ (МБЛА ВВП) | 2011 |
|
RU2455198C1 |
| Беспилотный летательный аппарат | 2023 |
|
RU2811206C1 |
| Гиростабилизированная система стабилизации полезной нагрузки беспилотного воздушного судна | 2021 |
|
RU2762217C1 |
| МНОГОВИНТОВОЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2015 |
|
RU2693616C2 |

Изобретение относится к области авиации, в частности к конструкциям подвесов аппаратуры на летательных аппаратах. Платформа для использования в малоразмерном беспилотном летательном аппарате содержит раму в сборе, трансмиссионный блок и съемочный блок (1). Рама содержит первую скобу (2), вторую скобу (4), третью скобу (6) и соединительную раму (8) для крепления снаружи. Съемочный блок (1) закреплен на первой скобе (2), первая скоба (2) поворотно соединена со второй скобой (4), вторая скоба (4) поворотно соединена с третьей скобой (6). Трансмиссионный блок содержит первый двигатель (3), который непосредственно соединен с первой скобой (2) и приводит ее в движение для поворота относительно второй скобы (4), второй двигатель (5), непосредственно соединенный со второй скобой (4) и приводящий ее в движение относительно третьей скобы (6), а третий двигатель (7) приводит в движение третью скобу (6) для поворота относительно соединительной рамы (8). Центр тяжести первой скобы (2), второй скобы (4), третьей скобы (6) и съемочного блока (1) в целом приходится на ось Z вращения третьей скобы (6). Достигается возможность повышения точности корректировки положения платформы. 7 з.п. ф-лы, 7 ил.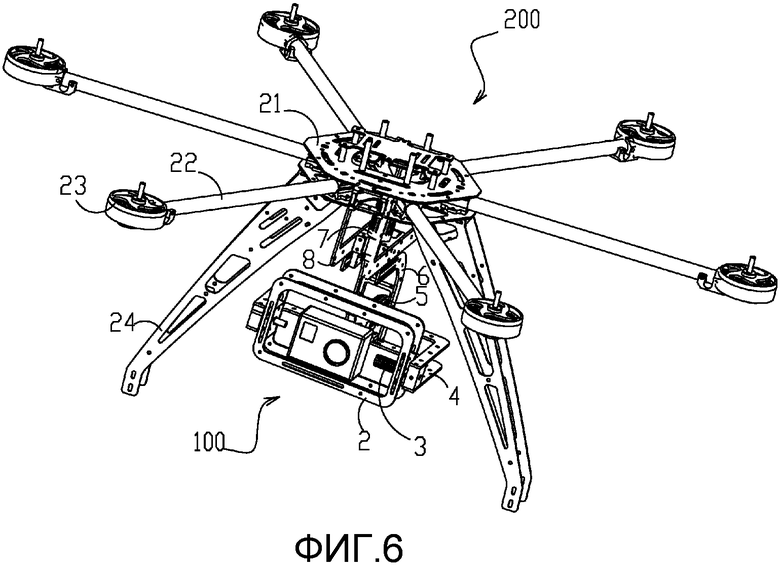
1. Платформа для использования в малоразмерном беспилотном летательном аппарате, содержащая раму в сборе, трансмиссионный блок и съемочный блок (1), отличающаяся тем, что:
рама в сборе содержит первую скобу (2), вторую скобу (4), третью скобу (6) и соединительную раму (8) для крепления снаружи, при этом съемочный блок (1) закреплен на первой скобе (2), первая скоба (2) поворотно соединена со второй скобой (4), вторая скоба (4) поворотно соединена с третьей скобой (6);
трансмиссионный блок содержит первый двигатель (3), второй двигатель (5) и третий двигатель (7), причем первый двигатель (3) непосредственно соединен с первой скобой (2) и приводит ее в движение для поворота относительно второй скобы (4), второй двигатель (5) непосредственно соединен со второй скобой (4) и приводит ее в движение для поворота относительно третьей скобы (6), а третий двигатель (7) непосредственно приводит в движение третью скобу (6) для поворота относительно соединительной рамы (8); и
центр тяжести первой скобы (2), второй скобы (4), третьей скобы (6) и съемочного блока (1) в целом приходится на ось Z вращения третьей скобы (6).
2. Платформа по п. 1, отличающаяся тем, что ось X вращения первой скобы (2) расположена перпендикулярно оси Y вращения второй скобы (4).
3. Платформа по п. 1, отличающаяся тем, что статор первого двигателя (3) закреплен на первой скобе (2), а ротор первого двигателя (3) закреплен на второй скобе (4); или
ротор первого двигателя (3) закреплен на первой скобе (2), а статор первого двигателя (3) закреплен на второй скобе (4).
4. Платформа по п. 1, отличающаяся тем, что статор второго двигателя (5) закреплен на третьей скобе (6), а ротор второго двигателя (5) закреплен на второй скобе (4); или
ротор второго двигателя (5) закреплен на третьей скобе (6), а статор второго двигателя (5) закреплен на второй скобе (4).
5. Платформа по п. 1, отличающаяся тем, что центр тяжести первой скобы (2) и съемочного блока (1) приходится на ось X вращения первой скобы (2).
6. Платформа по п. 1, отличающаяся тем, что центр тяжести первой скобы (2), второй скобы (4) и съемочного блока (1) в целом приходится на ось Y вращения второй скобы (4).
7. Платформа по п. 1, отличающаяся тем, что статор третьего двигателя (7) закреплен на соединительной раме (8), а ротор третьего двигателя (7) закреплен на третьей скобе (6); или
ротор третьего двигателя (7) закреплен на соединительной раме (8), а статор третьего двигателя (7) закреплен на третьей скобе (6).
8. Платформа по п. 1, отличающаяся тем, что трансмиссионный блок содержит четвертый двигатель, приводящий в движение съемочный блок (1) для поворота вокруг собственной оси.
| CN 101093733 A, 26.12.2007 | |||
| А Крайнев "Механика машин" фундаментальный словарь, Москва, изд | |||
| "Машиностроение", 2000, с.143 | |||
| СПОСОБ ОПТИМИЗАЦИИ ДИНАМИЧЕСКИХ УСЛОВИЙ ФУНКЦИОНИРОВАНИЯ ГРАВИТАЦИОННО-ЧУВСТВИТЕЛЬНЫХ УСТАНОВОК В УСЛОВИЯХ ОСТАТОЧНЫХ МИКРОУСКОРЕНИЙ НА БОРТУ ОРБИТАЛЬНЫХ КОСМИЧЕСКИХ АППАРАТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2369535C1 |
| CN 101734377 A, 16.06.2010 | |||
| US 4752791 A, 21.06.1988. | |||

